Техническое решение относится к области навигации, а конкретно к измерению параметров морских волн с использованием электронных неконтактных измерителей.
Известны достаточно много источников по измерению параметров волн, которые используют различные способы для достижения технического результата.
Известные устройства (А.А. Загородников «Радиолокационная съемка морского волнения» Л., Гидрометеоиздат, 1978, с. 141-158) содержат приемник и передатчик когерентной РЛС, стробирующее устройство, схему получения допплеровской частоты, частотомер, запоминающее устройство, корректирующий фильтр и спектроанализатор.
Недостатком данных устройств является длительный период измерения порядка 20 мин, что недопустимо для оперативного получения данных о волнении и фиксации площади моря. Точность измерения таких устройств невелика, требуется несколько серий измерений.
Известно устройство «Определение параметров волнения совмещенной системой измерения скорости судна и высоты волны» (Ванаев А.П., Чернявец В.А. - Судостроение №8-9, 1993 с. 6-8), состоящее из антенны, приемопередатчика, блока измерения высоты, измерителя частоты Допплера, блока измерения скорости, вычислителя высоты волн и фазовой скорости волн, устройства для определения направления прихода волн, скорости определения флуктуацинной составляющей скорости, вычислителя угла встречи с волной, позволяющее оперативно измерить параметры волнения не только с летательных аппаратов, имеющих режим висения, но и с борта любых подвижных морских объектов.
Однако он измеряет относительную высоту, определяемую разностью текущей высоты борта и возвышения профиля волны, что существенно препятствует достижению точности измерения параметров волнения. На точность измерения влияют возмущения, вызванные качкой судна.
Известно также устройство, устройство измерения параметров волнения, (патент №2137153, 1999), состоящее из антенны, приемопередатчика, измерителя частоты Допплера, блока измерения скорости, вычислителя высоты волн и фазовой скорости волны, вычислителя, схемы определения функциональной составляющей скорости, устройства для определения направления прихода волн, вычислитель угла встречи с волной, а также из введенных измерительного модуля и блока коррекции, совокупность которых во взаимодействии позволяет реализовать указанный технический результат.
Недостатком устройства является сложное схемотехническое решение, использование большого количества преобразующих блоков приводит к увеличению погрешности измерения, увеличивается постоянная времени измерения и при небольших волнах результат измерения усредняется.
Известно устройство измерения параметров волнения (RU 2489731 С1 Бюл. №22, 2012), выбранное в качестве прототипа. Устройство измерения параметров волнения состоит из антенны, приемопередатчика, измерителя частоты Допплера, блока измерения скорости, вычислителя частоты волн и фазовой скорости волны, вычислителя, схемы определения флуктуационной составляющей скорости, устройства для определения направления прихода волн, вычислителя угла встречи с волной, измерительного блока коррекции, а также из введенных блока антенн приема спутниковых сигналов, функционально-логического блока, монитора.
К недостаткам этого устройства можно отнести сложность обработки сигнала датчика, множество вычислительных блоков, соответственно возрастают погрешности и искажения в выходном сигнале, возможность применения этого устройства для кораблей, у которых осуществляется самовыравнивание, сложность схемотехнического и конструктивного исполнения.
Задачей технического решения является разработка устройства для измерения параметров морской волны - определение, хранение и передача информации о высоте, длине и скорости морской волны. Наличие технических параметров волны позволят использовать энергию морских волн для преобразования энергии волны в энергетическую.
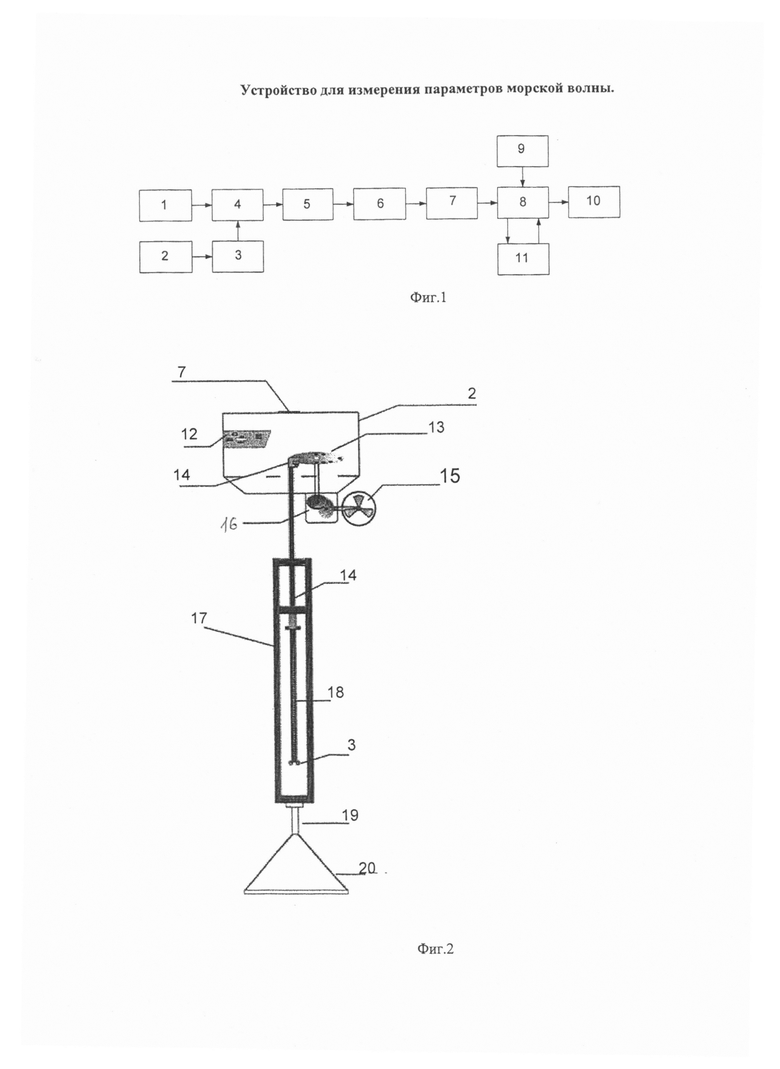
На фиг. 1 представлена блок-схема устройства.
На фиг. 2 представлено устройство измерителя параметров волн.
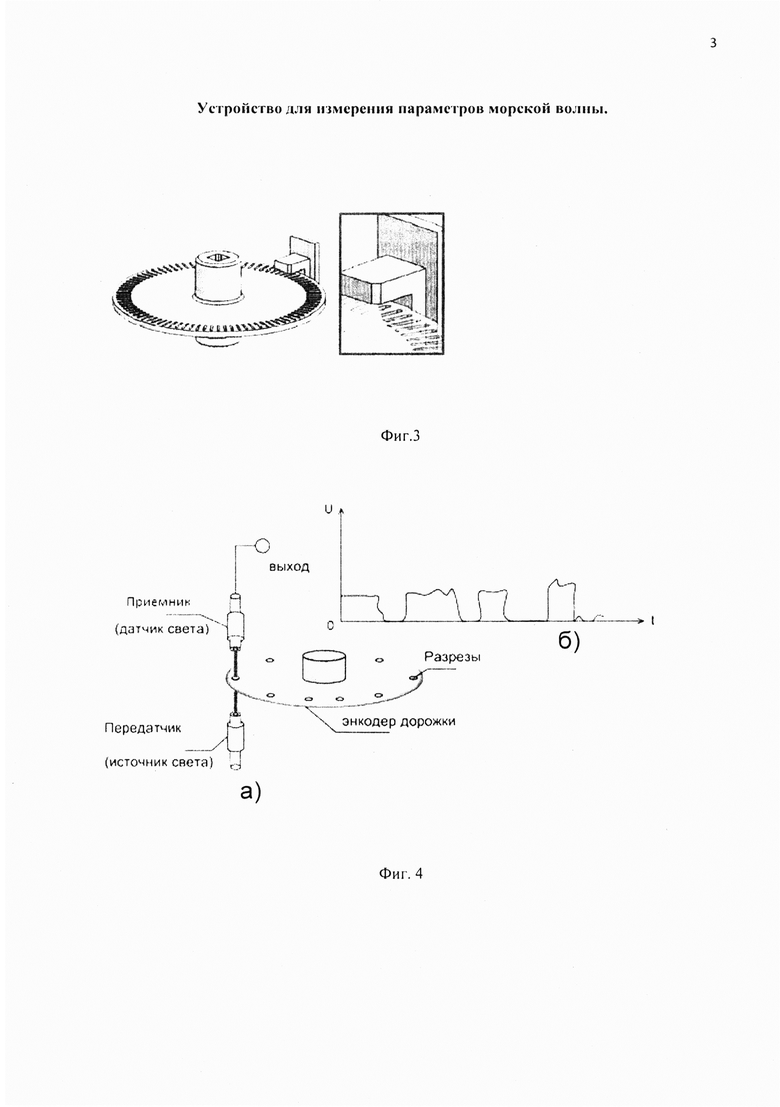
На фиг. 3 представлено схематическое устройство кодирующее устройство (энкодера).
На фиг. 4 представлено устройство кодирования сигналов устройства.
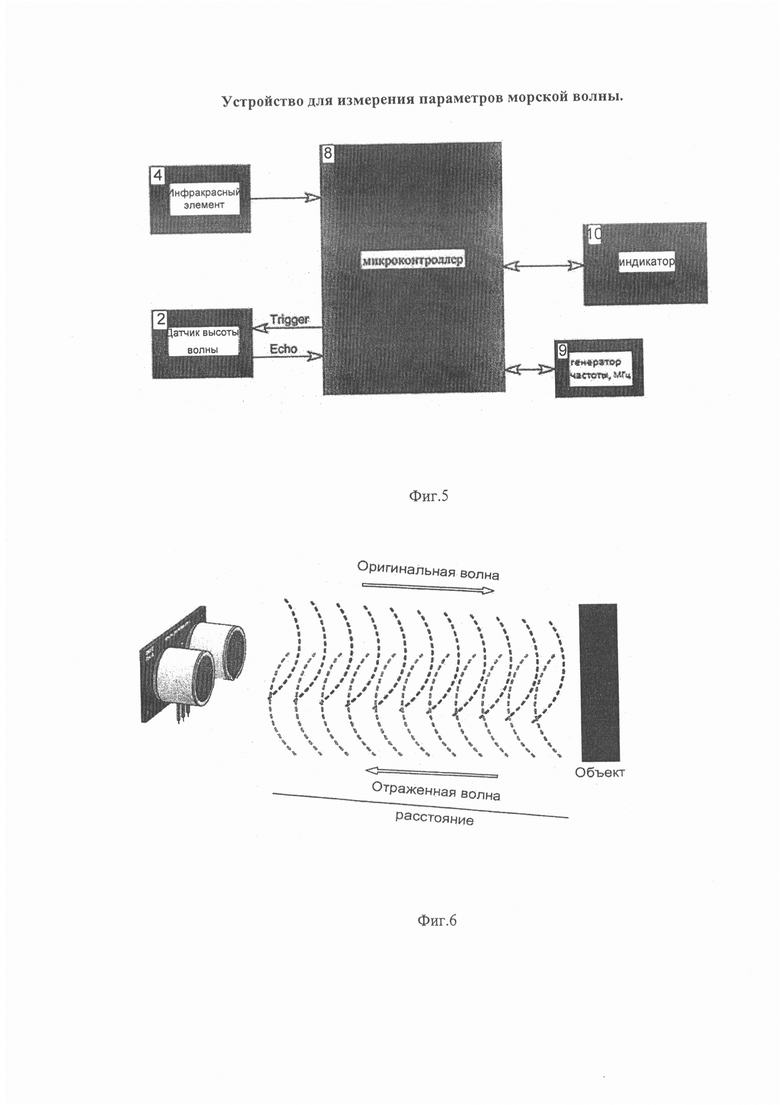
На фиг. 5 представлена блок-схема микроконтроллера.
На фиг. 6 представлено устройство, поясняющее работу ультразвукового датчика.
На фиг. 7 представлен образец ультразвукового датчика.
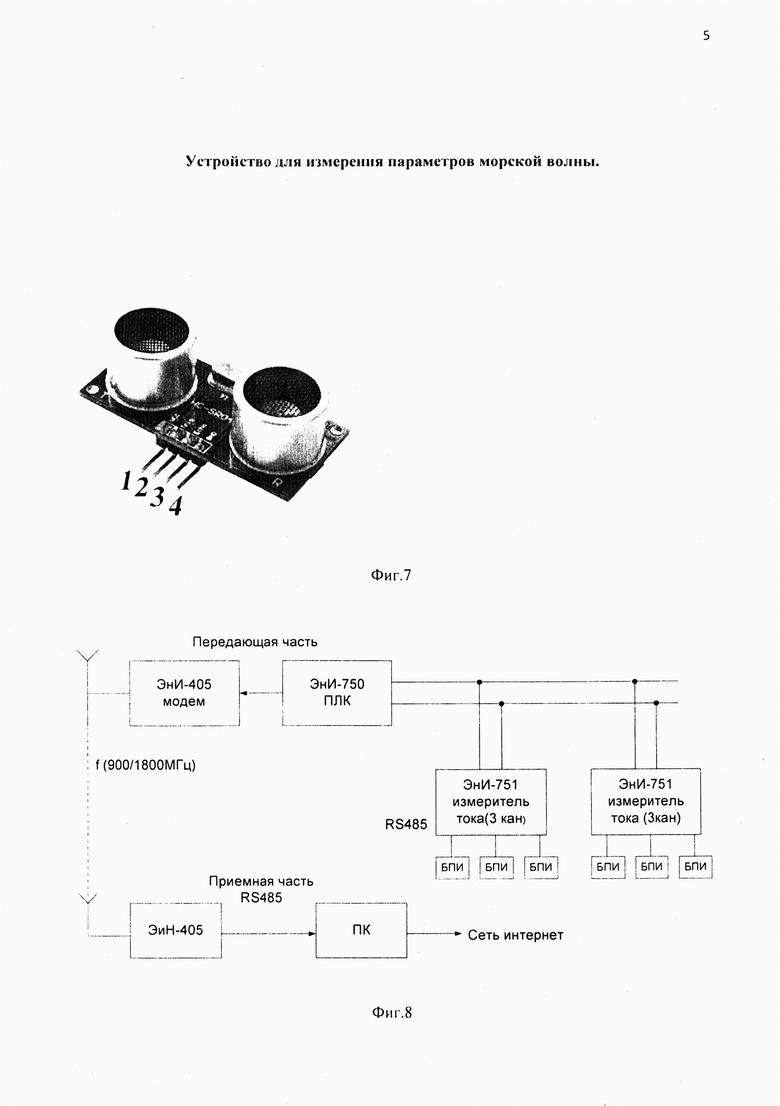
На фиг. 8 представлена блок-схема передачи-приема информации измерителя разработанного устройства.
Устройство (фиг. 1) содержит: 1 - датчик измерения скорости волны; 2 - датчик высоты волны; 3 - блок измерения высоты волны; 4 - инфракрасный датчик; 5 - кодирующее устройство; 6 - дешифратор; 7 - панель управления; 8 - микроконтроллер; 9 - генератор частоты; 10 - индикатор; 11 - блок передачи данных. Датчик измерения скорости волны 1, инфракрасный датчик 4; кодирующее устройство 5; дешифратор 6; панель управления 7; микроконтроллер 8; и индикатор 10 соединены последовательно, датчик высоты волны 2 соединен через блок измерения высоты волны 3 с инфракрасным датчиком 4, генератор частоты 9 и блок передачи данных 11 соединены с микроконтроллером 8.
Датчик высоты волны 2 представляет собой ультразвуковой датчик приема-передачи уровня высоты волны. Выход датчика высоты волны 2, подключен к входу блока измерения высоты волн 3. Выходы датчика измерения скорости волны 1 и блока измерения высоты волны 3 подключены к входам инфракрасного датчика 4, выходы датчика измерения скорости волны 1 и инфракрасного датчика 4 подключены к входам блока кодирующего устройства 5, выход которого подключен в входу дешифратора 6, выход дешифратора 6 подключен к входу панели управления 7, выход которого подключен к входу микроконтроллера 8, к другому входу микроконтроллера подключен выход генератора частоты 9. Выход микроконтроллера 8 подключен к входу индикатора 10 и к входу блока передачи данных 11 по системе GSM/GPRS на расстояние.
Для определения переноса энергии волной, который характеризуется вектором Пойтинга или вектором плотности потока энергии, необходимо знать величины высоты, длины и скорости волны.
Разработанное устройство для измерения параметров морской волны для измерения параметров волны (фиг. 2) содержит:
-датчик высоты волны, представляющий собой ультразвуковой датчик;
- панель управления 7, включающая индикатор 10, блок передачи данных 11, соединенных с микроконтроллером 8;
- блок 12, включающий 5 - кодирующего устройство; 6 - дешифратора; 7 - панели управления; 8 - микроконтроллера; 9 - генератор частоты;
- диск 13;
- гидроцилиндр 14
- винт 15;
- редуктор 16;
- труба 17;
- упругий элемент - пружина 18;
- датчик ультразвуковой 3;
- стержень 19;
- якорь 20.
Для измерения скорости волны использованы следующие элементы: 15- винт датчика измерения скорости волны, редуктор 16, диск 13, инфракрасный датчик 4. При увеличении скорости волны увеличивается частота вращения винта.
Для измерения высоты волны в устройстве (фиг. 2) предусмотрен датчик ультразвуковой 3, помещенный в гидроцилиндре 14, сигналы от датчика принимаются приемником.
Диск 13 (фиг. 3) представляет собой кодирующее устройство 5 инкрементный энкодер, который позволяет осуществлять шифровку. Шаговый оптический энкодер состоит из следующих компонентов (фиг. 4): источника света, диска с метками, фоточувствительного датчика и диска, имеющий определенное количество отверстий, через который свет от источника попадает на фоточувствительный датчик. При вращении диска с фоточувствительного датчика имеем серию импульсов (ν=ƒ(t)), частота которых прямо пропорциональна скорости волны. Если бы на валу диска была установлена червячная передача и интегрирующий механизм для счета импульсов, то в этом случае можно было бы оценить среднее значение изменения скорости волны в том или ином месте моря за определенный интервал времени.
При вращении диска с датчика (фиг. 4, а) получаем модулированные импульсы (фиг. 4, б), которые поступают на микроконтроллер (фиг. 5) электронного блока измерительного устройства.
Для определения уровня гребня волны - высоты волны предлагается использовать ультразвуковой дальномер, который позволяет определить высоту волны Н (фиг. 6) по принципу работы эхолота. Ультразвуковой датчик (2) (фиг. 2) крепится в гидроцилиндре (14) защищен трубой (17). Принцип его действия заключается в том, что при изменении высоты волны ультразвуковые импульсы передаются на панель управления от датчика ультразвуковых сигналов (фиг. 5) на вход микроконтроллера блок 8 (фиг. 5). Микроконтроллер 8 обрабатывает сигнал, калибрует и с выхода микроконтроллера этот ультразвуковой сигнал отколиброванный в параметр высоты волны в м передается на индикатор - отсчетное устройство - жидкокристаллический дисплей 10 (фиг. 5).
Данные о скорости волны с устройства (фиг. 2) поступают на инфракрасный датчик - 4 (фиг. 5), выход которого соединен с входом микроконтроллера - 8 (фиг. 5).
Ультразвуковой датчик (фиг. 6) излучает ультразвуковые волны частотой 40 кГц. В качестве ультразвукового датчика может быть использован датчик типа HC-SR04. Датчик выдает сигнал, позволяющий определить расстояние, а, следовательно, и высоту волны (фиг. 6). Этот датчик известный и применяется как элемент разработанного устройства измерения параметров морской волны.
Ультразвуковой датчик представляет собой ультразвуковой модуль HC-SR04 (фиг. 7), имеющий 4 контакта. На первый контакт (фиг. 7) подается напряжение питания - 5В; на второй контакт - положительный импульс 10 мкс - излучающий, работающий в режиме триггера; на контакт - эхо-пин, поступает отраженный сигнал; четвертый контакт -подключается на массу (земля). Датчик типа НС - SR04.
Сенсор (фиг. 7) излучает короткий ультразвуковой импульс в начале отсчета (в момент времени 0), который отражается от объекта и принимается сенсором. Расстояние рассчитывается с момента излучения сигнала, который отражается от объекта и принимается сенсором, то есть исходя из времени излучения и до получения эха.
Полученные величины скорости волны, длины волны и высоты волны от датчиков подаются на микроконтроллер - 8 (фиг. 5) и регистрируются на индикаторе - 10. Для работы микроконтроллера предусмотрен эталонный генератор частоты 9.
С целью передачи параметров волны на расстояние, то есть на берег необходимо произвести модуляцию данных сигнала параметров волны до 150 МГц для радиопередатчика и на берегу установить демодулирующее устройство. Питание передатчика на напряжение 9В можно осуществлять с помощью батарей.
Передача сигналов о параметрах волны - высоты, длины и скорости морской волны при значительном удалении от берега можно осуществлять с помощью беспроводной связи по сотовым сетям с дальнейшей передачи в интернет. Осуществлять передачу данных по сотовым сетям GSM/GPRS можно с помощью оборудования, разработанного ООО «Энергия - Источник» г. Челябинск. Структурная блок-схема представлена на фигуре 8.
В представленной блок-схеме беспроводной передачи данных (фиг.8):
- Эн И-405 (GSM/GPRS - RS 485/232) - оконечное устройство (модем) сотовой связи ƒ=900/1800 МГц с SIM картой;
- Эн И-750 - программируемый логический контроллер, осуществляющий управление опросом датчиков, формирование, поиск информации или сигнала on-line (по запросу);
- ПЛК - программируемый логический контроллер;
- Эн И-751 - блоки преобразования - измеряют ток I=4-20 mA от датчиков блока передачи импульсов (БПИ) и передают в Эн И - 750;
- БПИ - блоки преобразования информации (БПИ).
Приемная часть на основе Эн И - 405 с использованием сети RS 485 для подключения к ноутбуку или персональному компьютеру (ПК).
Далее данные из сети можно использовать в любом удобном месте.
Технический результат: повышение точности измерения параметров за счет упрощения схемотехнического решения и применения современных электронных блоков и микроконтроллера.
Достигаемый технический результат - повышение точности измерения, постоянный контроль параметров волн. Хранение и передача информации о скорости, высоте и длине волны на расстояние.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2421751C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2008 |
|
RU2376653C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МОРСКИХ ВОЛН | 2012 |
|
RU2523102C2 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ УЧЕТА ГАЗА, ПОСТАВЛЯЕМОГО НА АГНКС | 2016 |
|
RU2623833C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2007 |
|
RU2344448C2 |
Изобретение относится к области навигации, а конкретно к измерению параметров морских волн с использованием электронных неконтактных измерителей. Устройство содержит датчик измерения скорости волны, датчик высоты волны, блок измерения высоты волны, инфракрасный элемент, кодирующее устройство, дешифратор, панель управления, микроконтроллер, генератор частоты, индикатор, блок передачи данных. Датчик измерения скорости волны, инфракрасный датчик, кодирующее устройство, дешифратор, панель управления, микроконтроллер и индикатор соединены последовательно, ультразвуковой датчик соединен через блок измерения высоты волны с инфракрасным элементом, генератор частоты и блок приема-передачи данных соединены с микроконтроллером. Датчик высоты волны представляет собой ультразвуковой датчик приема-передачи уровня высоты волны, выход которого подключен к входу блока измерения высоты волн. Выходы блоков 1 и 3 подключены к входам блока 4, представляющего собой инфракрасный излучатель, выходы блоков 1 и 4 подключены к входам блока кодирующего устройства 5, выход которого подключен в входу дешифратора 6, выход дешифратора 6 подключен к входу панели управления 7, выход которого подключен к входу микроконтроллера 8, к другому входу микроконтроллера подключен выход генератора частоты 9. Выход микроконтроллера 8 подключен к входу индикатора 10 и к входу блока передачи данных 11 по системе GSM/GPRS на расстояние. Технический результат заключается в повышении точности измерения, обеспечении постоянного контроля параметров волн, хранении и передаче информации о скорости, высоте и длине волны на расстояние. 1 з.п. ф-лы, 8 ил.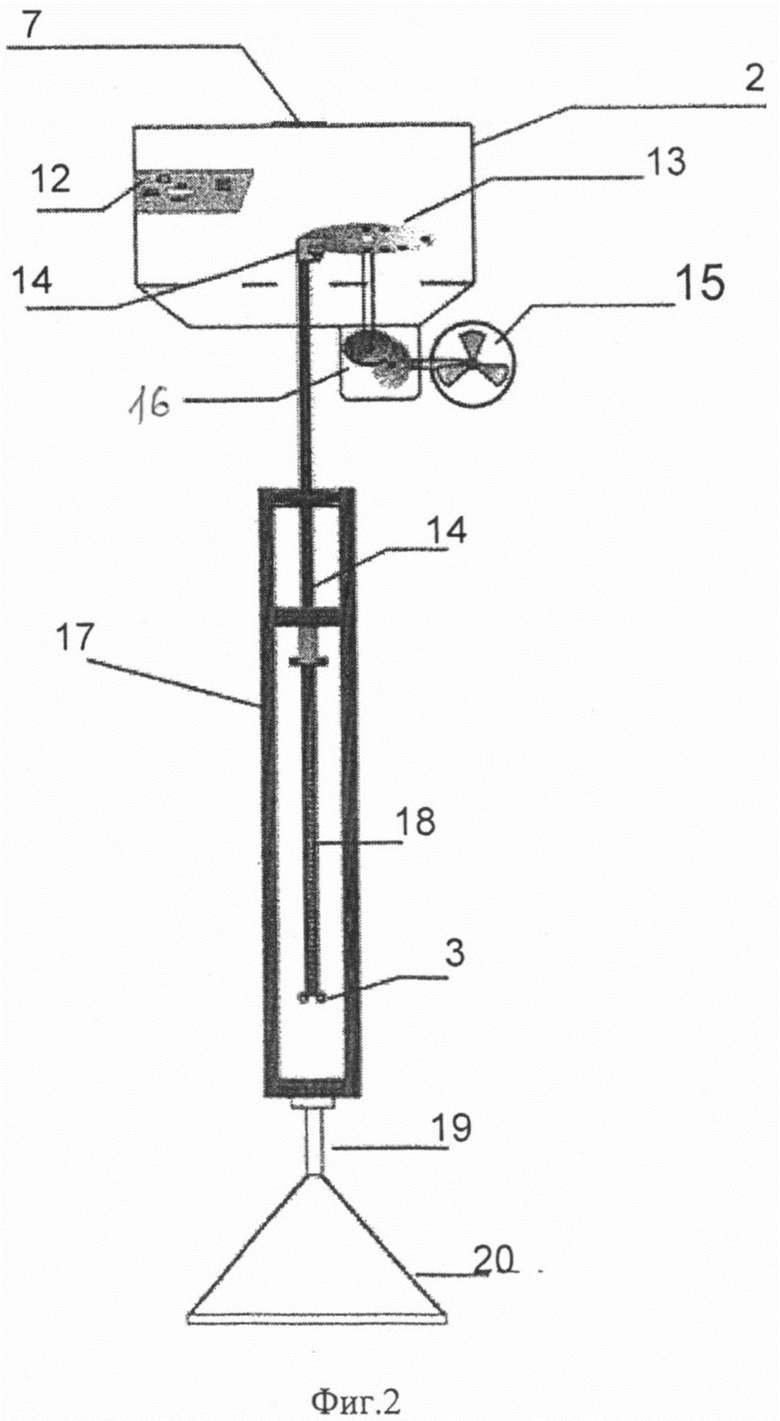
1. Устройство для измерения параметров морской волны, включающий датчик измерения скорости волны, блок передачи данных, индикатор, отличающееся тем, что содержит датчик высоты волны, блок измерения высоты волны, инфракрасный элемент, кодирующее устройство, дешифратор, панель управления, микроконтроллер, генератор частоты, причем датчик измерения скорости волны, инфракрасный датчик, кодирующее устройство, дешифратор, панель управления, микроконтроллер и индикатор соединены последовательно, ультразвуковой датчик соединен через блок измерения высоты волны с инфракрасным элементом, генератор частоты и блок передачи данных соединены с микроконтроллером.
2. Устройство по п. 1, отличающееся тем, что датчик измерения скорости волны содержит винт, редуктор, диск, инфракрасный датчик, винт через редуктор соединен с диском, выполненным с отверстиями, ультразвуковой датчик, помещенный в гидроцилиндре, сигналы от датчика фиксируются приемником, изменение положения поплавка посредством ультразвуковых импульсов через микроконтроллер фиксируются на индикаторе.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МОРСКИХ ВОЛН | 2012 |
|
RU2523102C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 1996 |
|
RU2137153C1 |
| ГРЯДОДЕЛАТЕЛЬ-СЕЯЛКА | 2004 |
|
RU2275777C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |

