Область техники
Настоящее изобретение относится к области тестов авиационного оборудования.
В частности, оно относится к способу оценки нормальности или ненормальности измеренного значения физического параметра устройства, в частности, двигателя летательного аппарата.
Уровень техники
Испытательный стенд является площадкой, позволяющей измерять характеристики испытываемой машины (как правило, двигателя летательного аппарата) во время тестов в контролируемых условиях, чтобы отслеживать ее поведение. Во время таких тестов считываются многочисленные данные при помощи датчиков, которыми оснащен стенд и/или испытываемая машина, чтобы внести их в специальную базу данных, называемую также базой данных испытаний и в дальнейшем называемую базой испытания. Для упрощения в дальнейшем речь пойдет о датчиках стенда, которые по сути включают в себя датчики, которыми оснащен двигатель в рамках испытаний.
Как правило, испытываемая машина является либо прототипом в фазе разработки, который необходимо протестировать (после чего полученные данные используются в конструкторских бюро для усовершенствования машин и их доводки), либо конечным изделием, для которого необходимо произвести проверку спецификаций и надежности (в этом случае получаемые данные используются бригадами контроля качества). В альтернативном варианте испытываемая машина может быть либо двигателем в комплекте, либо компонентом двигателя для частичных испытаний.
Однако по причине дефектов одного или нескольких датчиков стенда и/или испытываемой машины получаемые данные часто имеют ненормальные или искаженные значения. В этом случае база данных испытаний оказывается «загрязненной» данными, полученными в результате «ненадлежащего» измерения.
Это создает проблему для пользователей базы (в частности, для конструкторских бюро), которые пользуются всеми записанными данными, в частности, чтобы производить сравнения характеристик. Эти данные можно также использовать для применения цифровых моделей двигателя к стенду.
Кроме того, в ходе самого испытания можно быстро обнаруживать любой неисправный датчик, поскольку решение об остановке испытания принимается в зависимости от серьезности аномалии. Действительно, испытания являются очень дорогими, поэтому важно оптимизировать эти испытания и, в частности, их воспроизведение.
Во французской заявке FR 2965915 описан пример способа мониторинга в реальном времени датчиков испытательного стенда, который позволяет выявить неисправность датчика, однако он не может обнаруживать отклонение качества измерений как таковое. Кроме того, известные способы неотделимы от испытательного стенда и не позволяют идентифицировать впоследствии ненормальные измерения среди измерений, внесенных в базу испытания.
Поэтому существует потребность в надежном, эффективном и воспроизводимом контроле измерений параметров, связанных с двигателем, позволяющем без труда идентифицировать искаженное измерение среди совокупности измерений.
Сущность изобретения
В качестве первого объекта настоящим изобретением предложен способ оценки нормальности или ненормальности измеренного датчиком значения физического параметра устройства для значения рабочего параметра указанного устройства, при этом множество пар, каждая из которых определяет контрольное значение физического параметра для значения рабочего параметра, сохраняют в базе данных, хранящейся в средствах хранения данных, при этом способ включает в себя осуществление следующих этапов при помощи средств обработки данных:
(a) в зависимости от регрессионной модели, связанной с указанным множеством пар, вычисляют оценочное значение физического параметра для значения рабочего параметра;
(b) вычисляют соответствующую погрешность;
(c) в зависимости от дисперсионной модели, связанной с указанным множеством пар, вычисляют оценочное значение дисперсии физического параметра для значения рабочего параметра;
(d) в зависимости от погрешности, от оценочного значения дисперсии и от среднего значения погрешностей для указанного множества пар вычисляют вклад аномалии;
(e) вклад аномалии измеренного значения сравнивают с порогом в виде числа стандартных отклонений;
(f) если вклад аномалии превышает указанный порог, на интерфейсных средствах измерение отображают как ненормальное.
Оценка дисперсии в зависимости от рабочего параметра позволяет отказаться от вариации погрешности измерения (зависящей от контекста использования). Построенный интервал достоверности (допуск σ на Zscore) относительно регрессионной модели является, таким образом, более реалистичным, чем постоянный разброс, и обнаружение ненормальных точек становится более точной. Модель тревожного оповещения за счет этого выигрывает в эффективности.
Согласно другим предпочтительным и не ограничительным признакам:
- способ содержит предварительную фазу обработки указанного множества пар из базы данных, включающую в себя осуществление следующих этапов при помощи средств обработки данных:
(а0) определяют указанную регрессионную модель, связанную с указанным множеством пар, при помощи регрессии, моделирующей значение y физического параметра в зависимости от значения х рабочего параметра на основании множества  , где xi, yi обозначает значения пары, записанной в базе данных;
, где xi, yi обозначает значения пары, записанной в базе данных;
(a1) для каждой из пар вычисляют оценочное значение физического параметра и соответствующую погрешность;
(а2) вычисляют среднее значение указанных погрешностей;
(а3) в скользящем окне размером w вычисляют множество значений дисперсии погрешности, каждое из которых связано со значением рабочего параметра пары;
(а4) определяют указанную дисперсионную модель, связанную с указанным множеством пар, при помощи регрессии, моделирующей значение var дисперсии погрешности в зависимости от значения x рабочего параметра на основании множества  , где varj обозначает вычисленное значение дисперсии погрешности, и xj обозначает соответствующее значение рабочего параметра.
, где varj обозначает вычисленное значение дисперсии погрешности, и xj обозначает соответствующее значение рабочего параметра.
- предварительная фаза включает в себя этап (а5) определения, в зависимости от указанной определенной модели дисперсии, зоны достоверности вокруг указанной определенной регрессионной модели и отображения указанной зоны достоверности на интерфейсных средствах;
- зону достоверности определяют по верхней огибающей, отвечающей формуле  , и нижней огибающей, отвечающей формуле
, и нижней огибающей, отвечающей формуле  , где
, где  является регрессионной моделью, и g является дисперсионной моделью;
является регрессионной моделью, и g является дисперсионной моделью;
- вклад аномалии получают по формуле  , где resexec обозначает погрешность, связанную с измеренным значением физического параметра,
, где resexec обозначает погрешность, связанную с измеренным значением физического параметра,  обозначает оценочное значение дисперсии, и mean является средним значением погрешности для указанного множества пар;
обозначает оценочное значение дисперсии, и mean является средним значением погрешности для указанного множества пар;
- указанное устройство является двигателем летательного аппарата;
- указанный физический параметр выбирают из группы, в которую входят связанные с двигателем давление, температура, скорость потока текучей среды и уровень шума;
- указанный рабочий параметр выбирают из группы, в которую входят связанные с двигателем режим и расход топлива;
- двигатель установлен на испытательном стенде, содержащем датчик, при этом этап (е) содержит остановку испытательного стенда, если измерение признается ненормальным;
- этап (е) содержит добавление пары, образованной измеренным значением физического параметра и соответствующим значением рабочего параметра, в указанную базу данных пар, если измерение не признается ненормальным.
Вторым объектом изобретения является аппаратура для оценки нормальности или ненормальности измеренного датчиком значения физического параметра устройства для значения рабочего параметра указанного устройства, содержащая средства обработки данных, средства хранения данных, хранящие в базе данных множество пар, каждая из которых определяет контрольное значение физического параметра для значения рабочего параметра, и интерфейсные средства, при этом аппаратура отличается тем, что средства обработки данных выполнены с возможностью реализации:
- модуля вычисления в зависимости от регрессионной модели, связанной с указанным множеством пар, оценочного значения физического параметра для значения рабочего параметра;
- модуля вычисления соответствующей погрешности;
- модуля вычисления в зависимости от дисперсионной модели, связанной с указанным множеством пар, оценочного значения дисперсии физического параметра для значения рабочего параметра;
- модуля вычисления вклада аномалии в зависимости от погрешности, от оценочного значения дисперсии и от среднего значения погрешности для указанного множества пар;
- модуля сравнения вклада аномалии измеренного значения с порогом в виде числа стандартных отклонений;
- модуля передачи тревожного сигнала на интерфейсные средства, извещающего об идентификации измерения как аномалии, если вклад аномалии превышает указанный порог σ.
Согласно другим предпочтительным и не ограничительным признакам, модуль обработки данных выполнен также с возможностью реализации:
- модуля определения указанной регрессионной модели, связанной с указанным множеством пар, при помощи регрессии, моделирующей значение y физического параметра в зависимости от значения х рабочего параметра на основании множества , где xi; yi обозначает значения пары, сохраненной в базе данных;
- модуля вычисления для каждой из пар оценочного значения физического параметра и соответствующей погрешности;
- модуля вычисления среднего значения указанных погрешностей;
- модуля вычисления в скользящем окне размером w множества значений дисперсии погрешностей, каждое из которых связано со значением рабочего параметра пары;
- модуля определения указанной дисперсионной модели, связанной с указанным множеством пар, при помощи регрессии, моделирующей значение var дисперсии погрешности в зависимости от значения х рабочего параметра на основании множества , где varj обозначает вычисленное значение дисперсии погрешности, и xj обозначает соответствующее значение рабочего параметра.
Третьим объектом изобретения является система, содержащая:
- испытательный стенд, содержащий датчик и выполненный с возможностью установки на нем устройства;
- аппаратуру согласно второму объекту изобретения для оценки нормальности или ненормальности измеренного датчиком значения физического параметра указанного устройства для значения рабочего параметра указанного устройства.
Четвертым и пятым объектами изобретения являются компьютерный программный продукт, содержащий командные коды для исполнения способа согласно первому объекту изобретения для оценки нормальности или ненормальности измеренного датчиком значения физического параметра указанного устройства для значения рабочего параметра указанного устройства; и средство хранения данных, считываемое компьютерной аппаратурой, на котором записанный компьютерный программный продукт содержит командные коды для исполнения способа согласно первому объекту изобретения для оценки нормальности или ненормальности измеренного датчиком значения физического параметра указанного устройства для значения рабочего параметра указанного устройства.
Краткое описание чертежей
Другие признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания предпочтительного варианта осуществления. Это описание представлено со ссылками на прилагаемые чертежи, на которых:
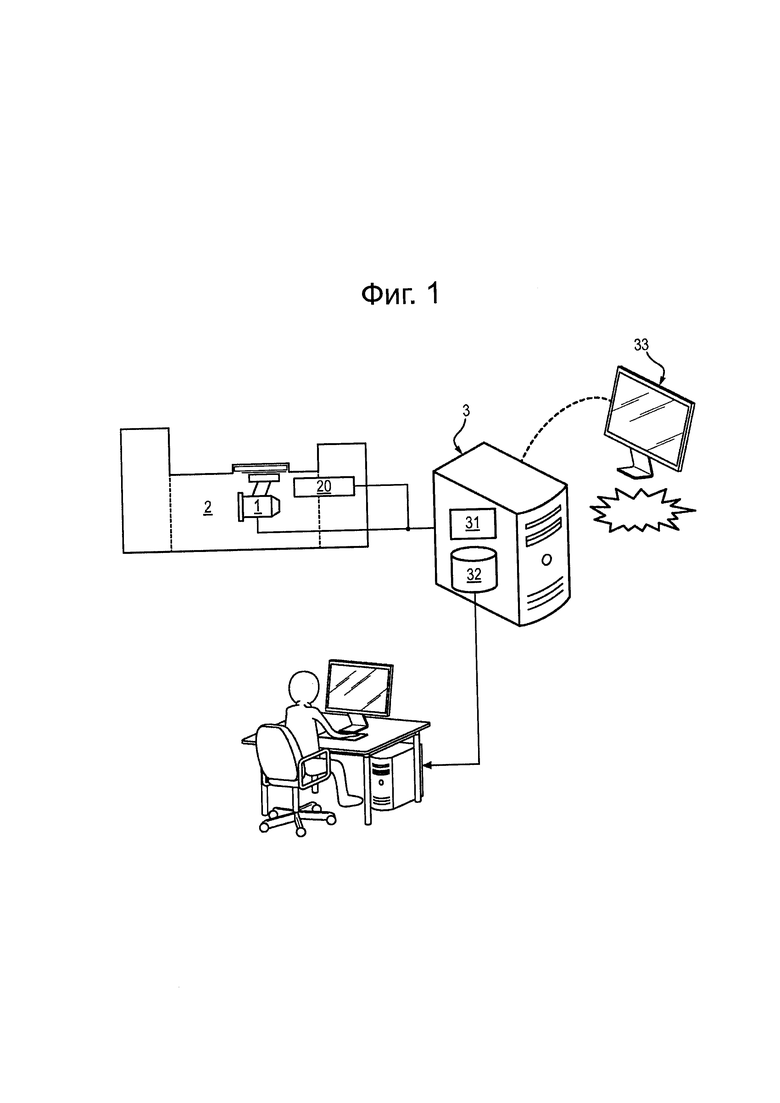
фиг. 1 - пример среды, в которой осуществляют заявленный способ;
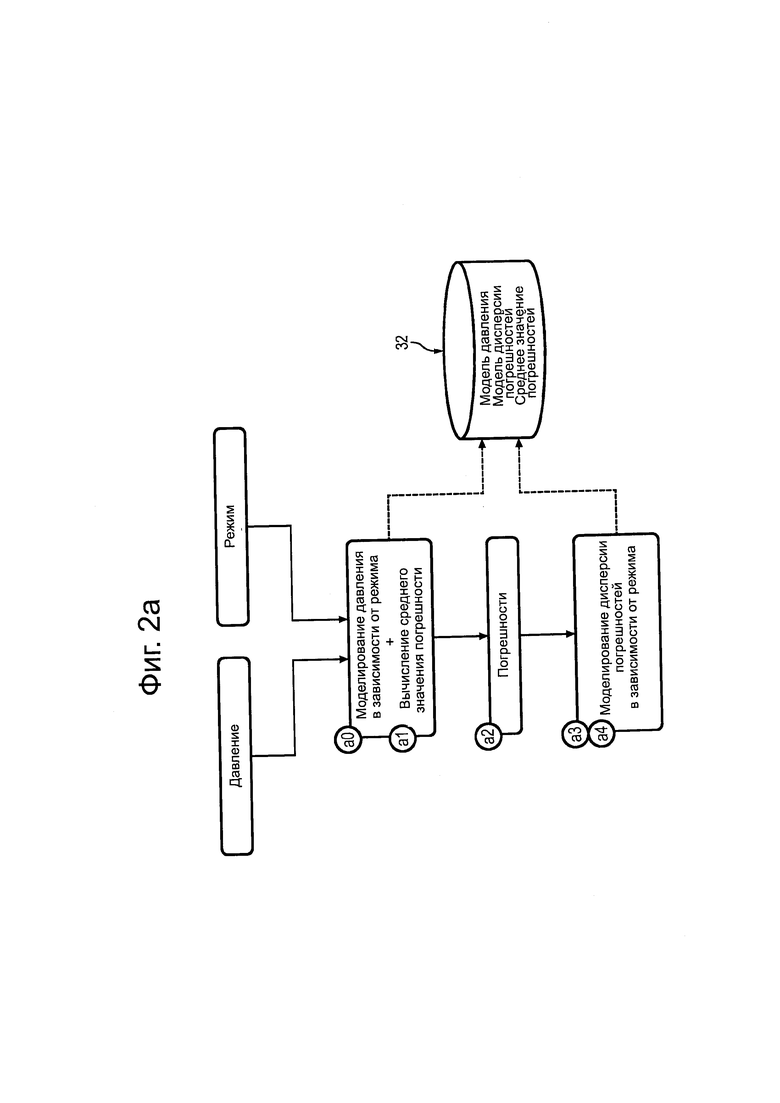
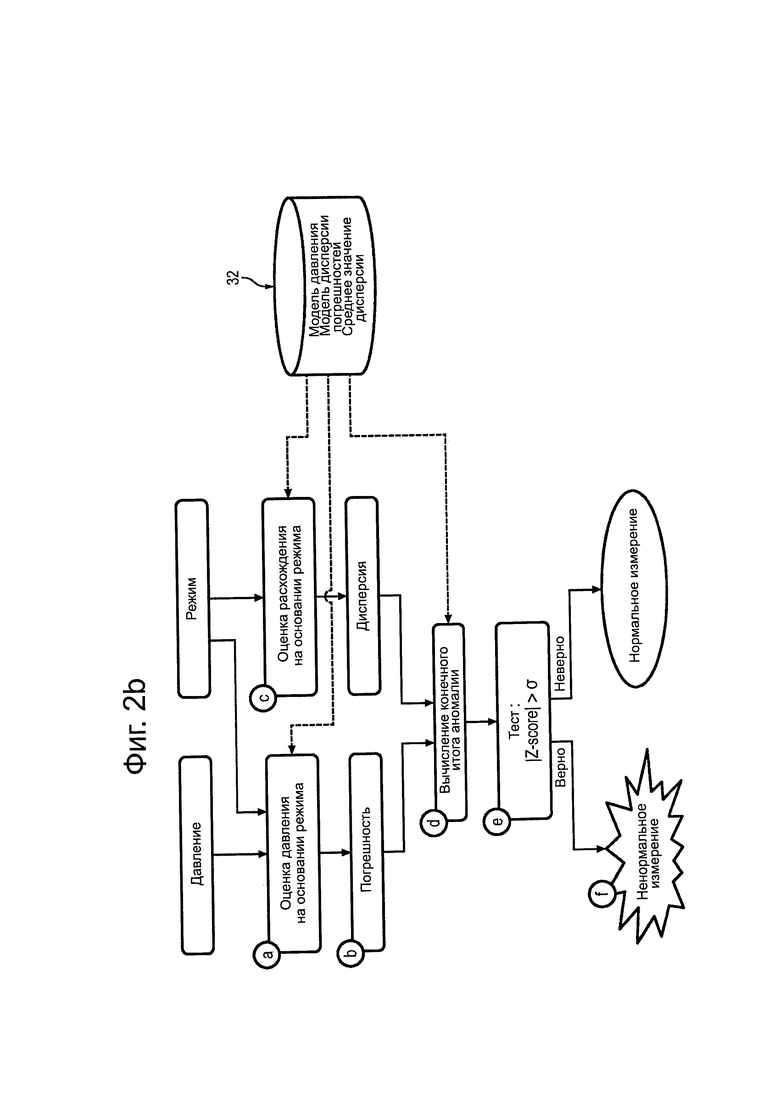
фиг. 2а-2b иллюстрируют этапы двух фаз примера заявленного способа;
фиг. 3a-3f - примеры отображения на интерфейсе данных, полученных на различных этапах заявленного способа.
Осуществление изобретения
Описываемый со ссылками на фиг. 1 настоящий способ является способом оценки нормальности или ненормальности измеренного датчиком 20 значения yexec физического параметра управляемого устройства 1 для значения хехес рабочего параметра указанного двигателя 1. В частности, управляемое устройство 1 является двигателем 1 летательного аппарата, как правило, газотурбинным двигателем полностью или частью газотурбинного двигателя, в частности, двухконтурного газотурбинного двигателя.
Хотя в настоящем изобретении в дальнейшем рассмотрен предпочтительный пример газотурбинного двигателя (во время полета или на испытательном стенде), понятно, что изобретение этим примером не ограничивается, и под «устройством» следует понимать любую физическую систему, получающую «на входе» по меньшей мере один рабочий параметр, который необходимо отслеживать при помощи датчика и поведение которого может быть сложным для непосредственного моделирования. Название «испытываемая машина» соответствует случаю, когда устройство находится в стадии теста, например, на стенде (а не во время реальной работы).
Настоящий способ можно осуществлять для любого наземного или не наземного устройства создания тяги.
Понятно, что кроме тяговых систем, настоящий способ может находить другое применение в авиации, в частности, в системах взлетно-посадочных шасси или в любых сложных материальных устройствах, требующих мониторинга нормальной работы.
В другой области, например, в области железнодорожного транспорта, можно указать системы торможения поездов или любое другое устройство обеспечения безопасности транспортного средства.
Изобретение может также касаться других систем на стадии изготовления или испытания.
Настоящий способ можно применять для любого мониторинга измерений (в том числе во время эксплуатации устройства), но предпочтительно в данном случае рассмотрен пример испытательных измерений: двигатель 1 (или другое устройство) установлен на испытательном стенде 2, с которым соединен датчик 20. Испытательный стенд 2 выполнен с возможностью имитации работы двигателя 1 в реальных условиях. Задачей настоящего изобретения является подтверждение или не подтверждение достоверности измерения, произведенного во время испытания. Таким образом, нормальность измерения напрямую связана с его достоверностью. Измерение, признанное недостоверным, будет считаться ненормальным.
Рабочий параметр (значение х) является «объясняющей» или «предсказывающей» переменной в отличие от измеряемого физического параметра (значение у), который является «объясняемой» или «предсказываемой» переменной. Иначе говоря, значение х рабочего параметра является причиной, тогда как значение у физического параметра является следствием.
В частности, рабочий параметр является контролируемым значением, связанным с двигателем 1, на которое может либо воздействовать пользователь, либо влиять окружающая среда. Иначе говоря он является командой. В дальнейшем тексте настоящего описания взят пример режима двигателя (то есть числа оборотов, осуществляемых ротором двигателя 1 за единицу времени), но понятно, что можно отслеживать многие другие рабочие параметры, такие как расход топлива, впрыскиваемого в двигатель 1, температура топлива, впрыскиваемого в двигатель 1, окружающее давление вокруг двигателя 1 и окружающая температура вокруг двигателя 1. Этот параметр является входным параметром, выбираемым для двигателя.
Физический параметр отображает физическую величину, характеризующую ожидаемое поведение двигателя 1 в ответ на приложение рабочего параметра, то есть физическую величину, для измерения которой предназначен датчик. Понятно, что для разных физических величин можно предусмотреть множество соответствующих датчиков. В частности, этим физическим параметром может быть давление в определенной точке двигателя 1, внутренняя температура в определенной точке двигателя 1, скорость потока текучей среды в определенной точке двигателя 1, уровень шума, производимого двигателем 1, плотность топлива в двигателе 1 и т.д. Специалист в данной области может выбирать измеряемую физическую величину в зависимости от задач испытания. В дальнейшем тексте описания будет рассмотрен пример давления, измеряемого датчиком 20 давления.
Пара (х; у) обозначает точечное считывание: для значения х рабочего параметра датчик 20 измеряет значение у физического параметра.
Множество пар  , каждая из которых определяет контрольное значение yi физического параметра для значения xi рабочего параметра, записаны в базе данных (которая и является вышеупомянутой базой данных испытаний), которая, в свою очередь, хранится в средствах 32 хранения данных. Под «контрольными» значениями следует понимать, что они получены во время стабилизированных фаз испытаний, то есть могут считаться нормальными. Возможные ненормальные значения уже удалены из базы.
, каждая из которых определяет контрольное значение yi физического параметра для значения xi рабочего параметра, записаны в базе данных (которая и является вышеупомянутой базой данных испытаний), которая, в свою очередь, хранится в средствах 32 хранения данных. Под «контрольными» значениями следует понимать, что они получены во время стабилизированных фаз испытаний, то есть могут считаться нормальными. Возможные ненормальные значения уже удалены из базы.
Средства 32 хранения данных (которые, как правило, являются жестким диском) и средства 31 обработки данных (например, процессор) принадлежат либо к аппаратуре 3, подсоединенной к датчику 20 (как показано на фиг. 1), либо встроены непосредственно в испытательный стенд 2. Аппаратура 3 (или другое оборудование) имеет интерфейсные средства 33 (такие как клавиатура и экран) для взаимодействия с базой данных и, в частности, для отображения результатов (см. ниже).
Пара (хехес; уехес) обозначает «отслеживаемое» измерение, то есть измерение, для которого необходимо определить, является измеренное значение yexec нормальным или нет.
Это отслеживаемое измерение может быть как измерением, полученным в реальном времени (в частности, во время работы в ходе эксплуатации двигателя), так и ранее записанным измерением (пара (хехес; yexec) уже хранится в базе данных и находится в стадии ожидания использования).
Можно применять систему запроса и анализа базы данных в реальном времени, используемую средствами 31 обработки.
Фаза обучения
Настоящий способ включает в себя две фазы. Первая является фазой обучения, а вторая - фазой исполнения. Предпочтительно фазу обучения осуществляют предварительно, чтобы создать модели, которые будут описаны ниже (и, в случае необходимости, сохранить их на средствах 32 хранения данных), после чего осуществляют фазу исполнения при каждом новом получении измерения. Именно фаза исполнения позволяет оценить нормальность или ненормальность измеренного значения yexec в соответствии с изобретением. Фазу обучения можно опять запускать время от времени, чтобы обновить модели.
В альтернативном варианте можно обходиться без предварительного обучения и определять модели в реальном времени при каждом осуществлении фазы исполнения.
Далее следует описание обеих фаз.
Фазу обучения можно рассматривать как совокупность этапов обработки только данных из базы (то есть независимо от пары (хехес; yexec)).
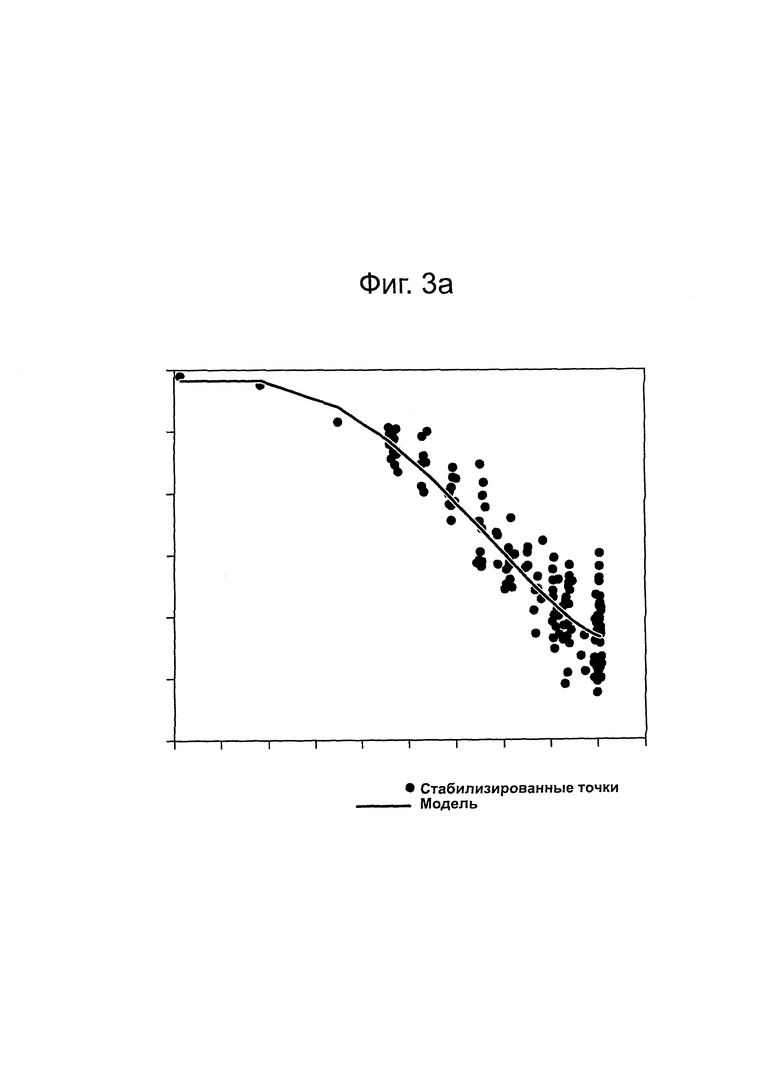
Как показано на фиг. 2а (где используется пример параметров режим/давление), фаза обучения начинается с этапа (а0) определения регрессионной модели, связанной с указанным множеством пар , при помощи регрессии, моделирующей y в зависимости от х на совокупности значений пар . Эту регрессионную модель можно применять в фазе исполнения.
Регрессия обозначает совокупность хорошо известных специалисту статистических методов для анализа связи переменной (в данном случае y) с одной или несколькими другими переменными (в данном случае х). Иначе говоря, на этапе (а0) определяют функцию  , позволяющую произвести аппроксимацию значений yi в зависимости от значений xi для данного типа связи. Известны линейная, полиномная, экспоненциальная, логарифмическая и т.д. регрессии.
, позволяющую произвести аппроксимацию значений yi в зависимости от значений xi для данного типа связи. Известны линейная, полиномная, экспоненциальная, логарифмическая и т.д. регрессии.
Выбор используемого типа связи предпочтительно производят в зависимости от характера кривой, и он может происходить автоматически с оптимизацией посредством максимизации коэффициента определения, например, как описано в патентной заявке FR 2939928.
На фиг. 3а показаны облако точек, образованное из n пар , и модель, полученная при помощи регрессии.
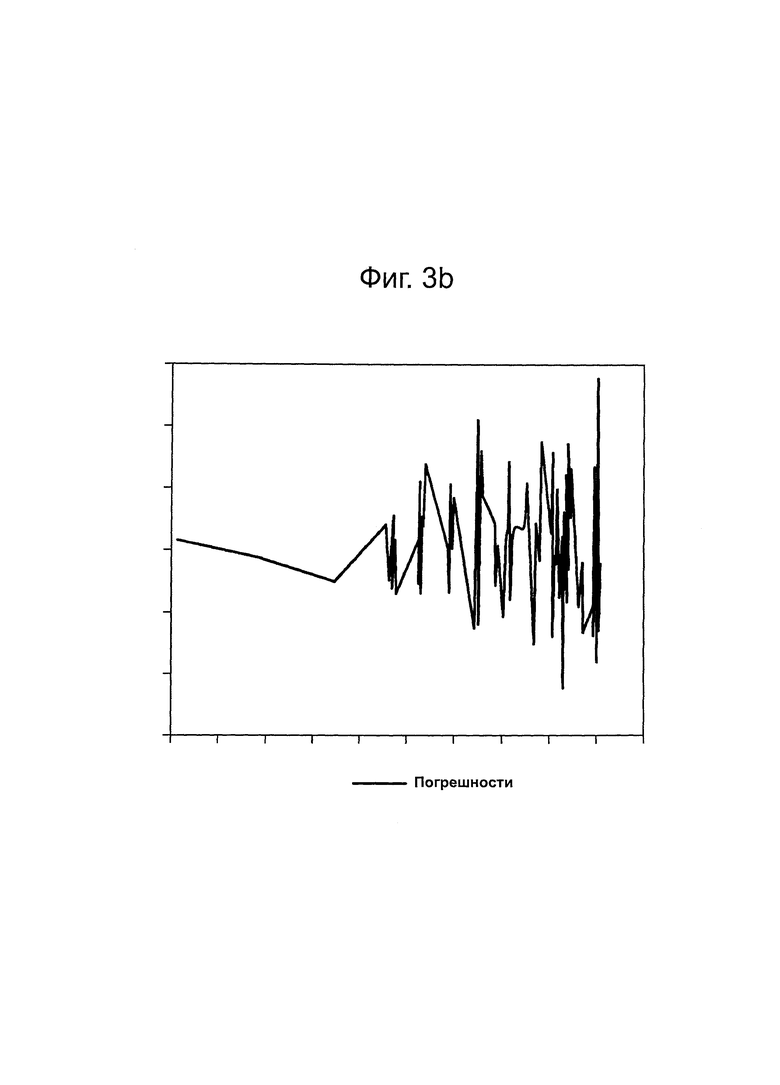
На втором этапе (a1) фаза обучения включает в себя вычисление, для каждой из пар, оценочного значения  физического параметра и погрешности resi, связанных друг с другом, погрешность является разностью между оценочным значением и измеренным значением. На основании регрессионной модели просто получают эти значения по формулам
физического параметра и погрешности resi, связанных друг с другом, погрешность является разностью между оценочным значением и измеренным значением. На основании регрессионной модели просто получают эти значения по формулам  и
и  , при
, при  . На фиг. 3b показаны полученные остатки погрешности.
. На фиг. 3b показаны полученные остатки погрешности.
На этапе (а2) вычисляют среднее значение указанных погрешностей:  .
.
После создания регрессионной модели средства 31 обработки данных определяют другую модель, применяемую в фазе исполнения: речь идет о дисперсионной модели.
Эту модель, тоже связанную с указанным множеством пар , обычно вычисляют в ходе двух последовательных этапов. На этапе (а3) вычисляют множество значений  дисперсии погрешности, и это множество значений позволит в дальнейшем применить регрессию на этапе (а4) для получения дисперсионной модели.
дисперсии погрешности, и это множество значений позволит в дальнейшем применить регрессию на этапе (а4) для получения дисперсионной модели.
Как известно, дисперсию вычисляют в виде среднего значения квадратов погрешностей. Множество значений дисперсии получают при помощи «скользящего окна» размером w (w является заранее определенным параметром алгоритма, и его предпочтительно выбирают достаточного размера, чтобы избежать проблемы расширения трубы достоверности, см. ниже. Например, можно взять 10% числа выборок). В частности, каждое значение varj дисперсии вычисляют на подмножестве (индексы от j до j+w-1) множества пар значений . В частности,  .
.
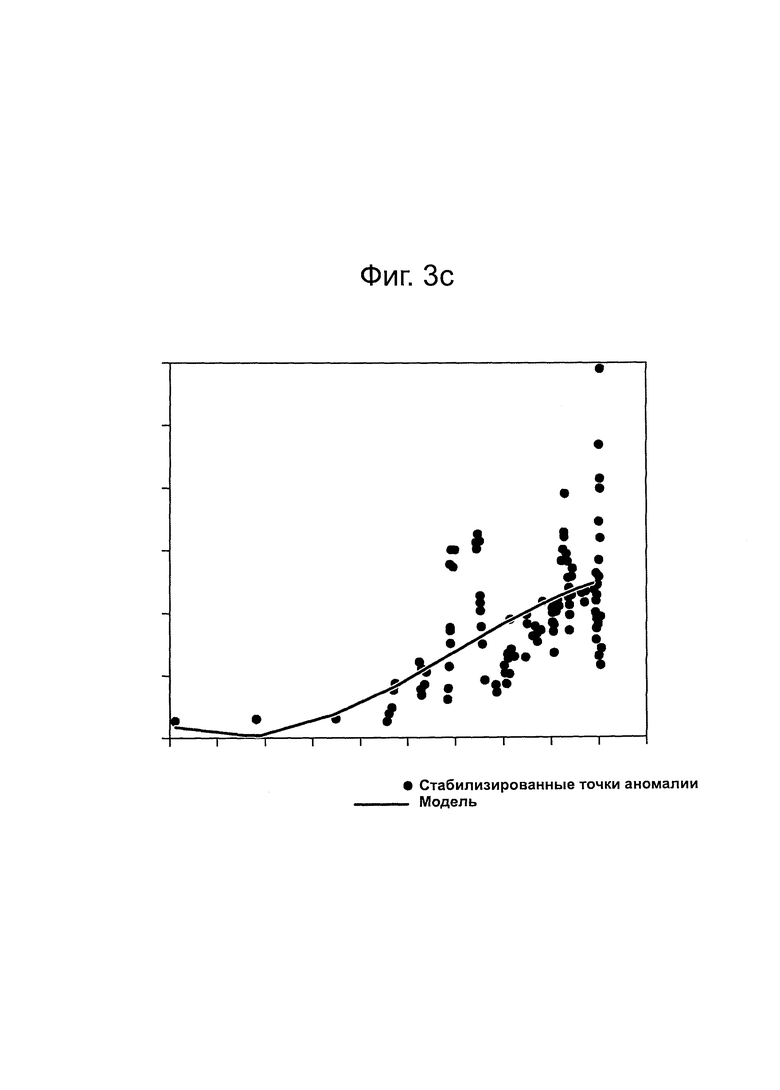
Аналогично этапу (а0), дисперсионную модель, связанную с указанным множеством определяют на этапе (а4) при помощи регрессии, моделирующей var в зависимости от х. Иначе говоря, на этом этапе средства 31 обработки данных определяют функцию g, при которой  , где
, где  .
.
На фиг. 3с показаны облако точек, образованное из n-w+1 пар  , и модель, полученная при помощи регрессии.
, и модель, полученная при помощи регрессии.
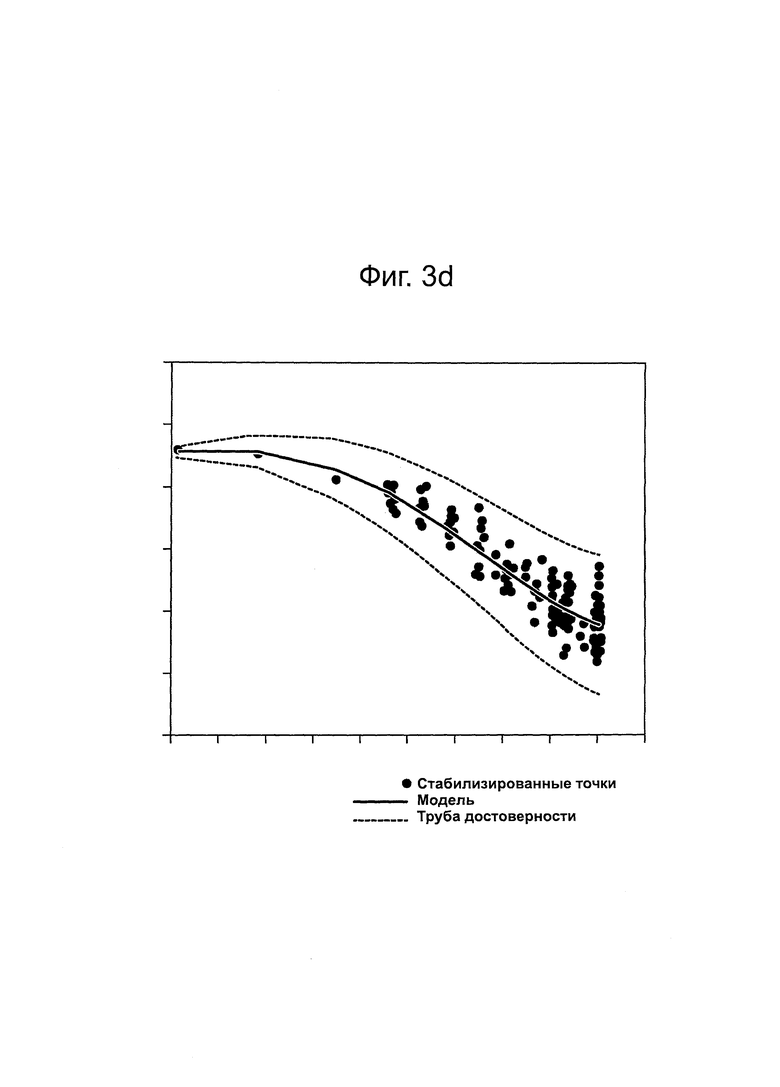
На факультативном этапе (а5) фаза обучения может включать в себя получение «трубы достоверности» (то есть зоны достоверности) вокруг регрессионной модели. Эта труба имеет верхнюю огибающую и нижнюю огибающую. Между этими двумя огибающими точка, связанная с парой значений (х; у), считается нормальной и не находится снаружи, как будет показано ниже.
Трубу достоверности определяют по разности амплитуды  относительно регрессионной модели, где порог σ является числом стандартных отклонений (см. ниже). Как было указано выше, эта труба определяет интервал достоверности, зависящий от дисперсии, что увеличивает реальность результатов: число отрицательных ложных заключений и положительных ложных заключений значительно уменьшилось.
относительно регрессионной модели, где порог σ является числом стандартных отклонений (см. ниже). Как было указано выше, эта труба определяет интервал достоверности, зависящий от дисперсии, что увеличивает реальность результатов: число отрицательных ложных заключений и положительных ложных заключений значительно уменьшилось.
Уравнение верхней огибающей задается формулой  , а уравнение нижней огибающей - формулой
, а уравнение нижней огибающей - формулой  .
.
Предпочтительно трубу достоверности добавляют к изображению облака точек, образованного n парами , и модели, полученной при помощи регрессии (типа показанной на фиг. 3а), чтобы получить изображение, показанное на фиг. 3d. Как будет показано ниже, эта труба позволяет упредить результат исполнения и наглядно (а также понятно, в том числе через не инициированные точки) показать, является измерение нормальным или нет.
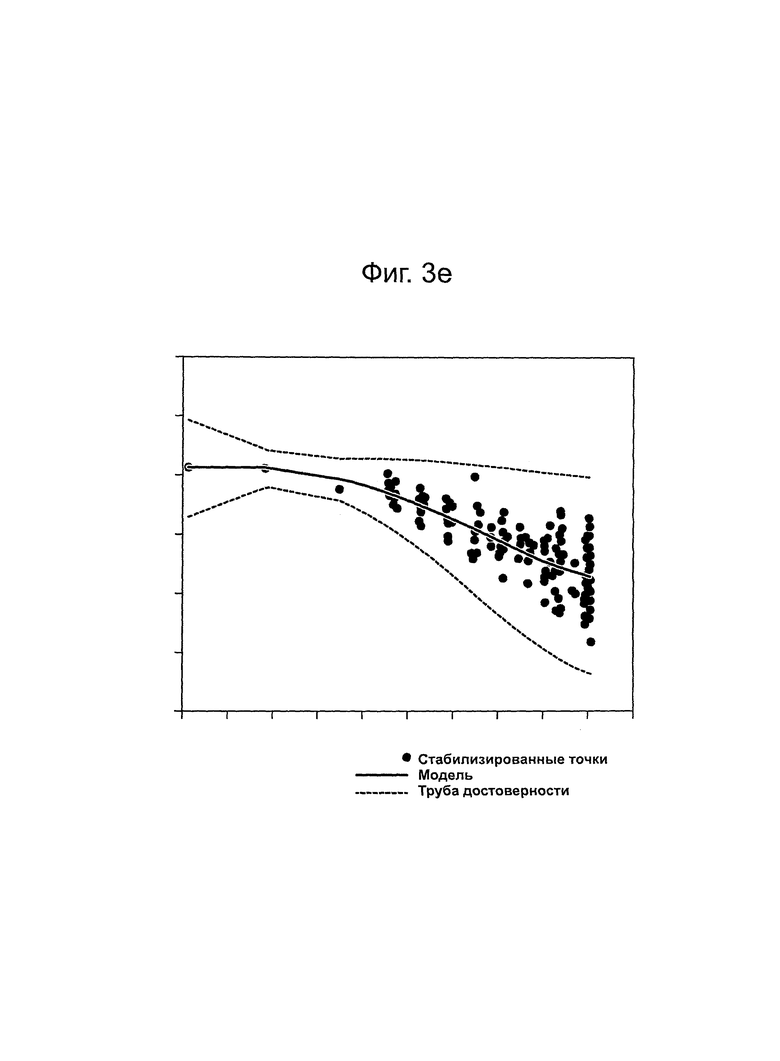
Следует отметить, что распределение точек не является одинаковым по параметру х. Действительно, в примере, где рабочим параметром является режим, производят гораздо больше измерений в режиме полного газа, чем в режиме малого газа. Это неодинаковое распределение может привести к расширению трубы достоверности в ее начале, как показано на фиг. 3е, если параметр w выбран неверно.
Предпочтительно параметр w выбирают достаточно большим, чтобы функция g была возрастающей. Для этого этапы (а3), затем (а4) можно итеративно повторять с возрастающими значениями w, пока это условие не будет соблюдено.
Фаза исполнения
Как было указано выше, фаза обучения представляет собой подготовительную работу для ускорения фазы исполнения (которая соответствует сути настоящего заявленного способа). В альтернативном варианте фазу обучения можно осуществлять «одновременно» с фазой исполнения. В данной части описание будет ссылаться на все описанные ранее соответствующие формулы.
Эта фаза позволяет оценить нормальность или ненормальность измеренного значения уехес физического параметра для значения хехес рабочего параметра.
Эта фаза показана на фиг. 2b. Если до этого была осуществлена фаза обучения, модели можно загрузить из средств 32 записи данных, как показано на этой фигуре.
На этапе (а) вычисляют оценочное значение  физического параметра для значения хехес рабочего параметра в зависимости от регрессионной модели, связанной с указанным множеством пар (в случае необходимости, эту модель определяют в фазе обучения). Как было указано выше, это вычисление производят при помощи формулы
физического параметра для значения хехес рабочего параметра в зависимости от регрессионной модели, связанной с указанным множеством пар (в случае необходимости, эту модель определяют в фазе обучения). Как было указано выше, это вычисление производят при помощи формулы  .
.
На следующем этапе (b) вычисляют соответствующую погрешность Resexec:  .
.
На этапе (с) (который можно осуществлять перед одним и/или другим из этапов (а) и (b)) вычисляют оценочное значение  дисперсии физического параметра для значения хехес рабочего параметра в зависимости от дисперсионной модели, связанной с указанным множеством пар (в случае необходимости, эту модель определяют в фазе обучения). Как было указано выше, это вычисление производят при помощи формулы
дисперсии физического параметра для значения хехес рабочего параметра в зависимости от дисперсионной модели, связанной с указанным множеством пар (в случае необходимости, эту модель определяют в фазе обучения). Как было указано выше, это вычисление производят при помощи формулы  .
.
Погрешность, оценочное значение  дисперсии и среднее значение mean погрешности (в случае необходимости, вычисленное во время фазы обучения) для указанного множества пар позволяют средствам обработки данных вычислить на этапе (d) вклад аномалии (называемый также вкладом достоверности) Zscore измеренного значения yexec. Предпочтительно конечный итог аномалии получают по формуле
дисперсии и среднее значение mean погрешности (в случае необходимости, вычисленное во время фазы обучения) для указанного множества пар позволяют средствам обработки данных вычислить на этапе (d) вклад аномалии (называемый также вкладом достоверности) Zscore измеренного значения yexec. Предпочтительно конечный итог аномалии получают по формуле  . Чем больше этот вклад, тем больше вероятность ненормальности измерения.
. Чем больше этот вклад, тем больше вероятность ненормальности измерения.
На этапе (е) вклад аномалии Zscore измеренного значения yexec сравнивают с вышеупомянутым порогом σ (выраженным в виде числа стандартных отклонений, например, от трех до шести стандартных отклонений).
Если вклад аномалии Zscore превышает указанный порог σ, измерение отображают как ненормальное на интерфейсе 22 на этапе (f). При этом может сработать тревожный сигнал, если речь идет о тесте в реальном времени на испытательном стенде 2, который выключают (текущее испытание не подтверждается, и аномалию необходимо проанализировать, прежде чем опять использовать испытательный стенд). При этом в базу данных пару (хехес; yexec) не добавляют (или ее удаляют, если она находилась там в ожидании проверки).
В противном случае измерение считается нормальным, и пару (хехес, yexec) добавляют к контрольным значениям базы данных. В случае необходимости, можно опять запустить фазу обучения для обновления моделей.
Предпочтительно автоматически передается сводный отчет (например, предназначенный для конструкторского бюро).
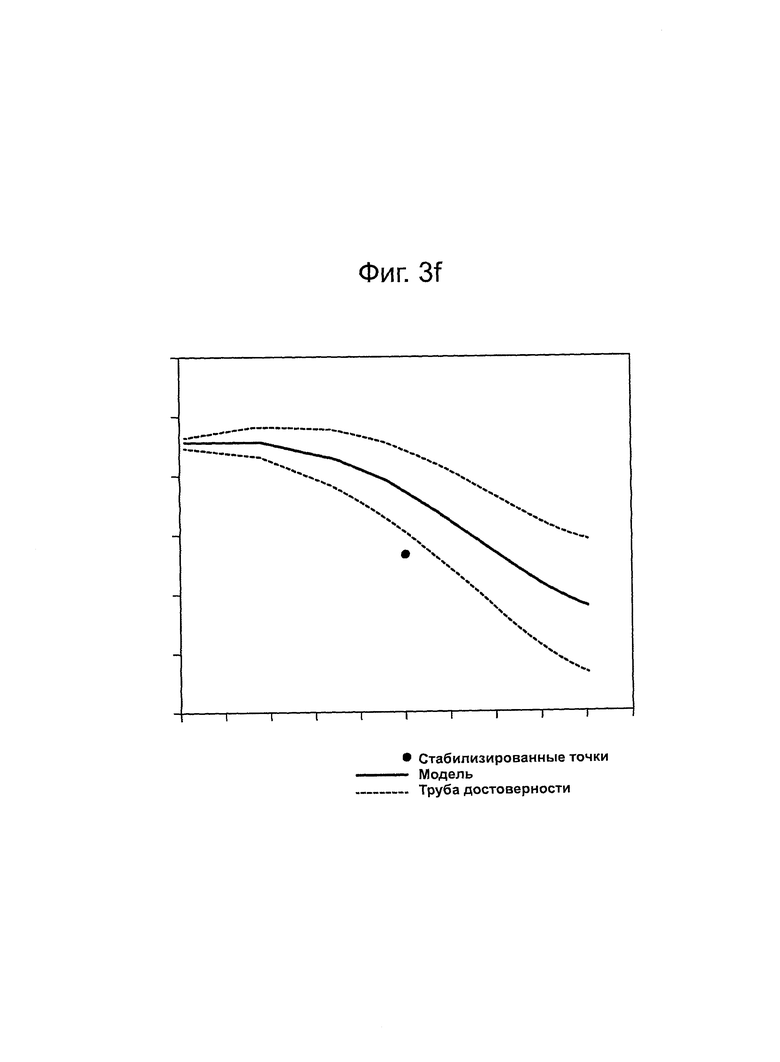
Следует отметить, что ненормальное измерение отображается за пределами вышеупомянутой трубы достоверности, например, как показано на фиг. 3f.
В частности, если Zscore>σ, то  (= половине диаметра трубы достоверности), и это значит, что соответствующая точка находится за пределами трубы достоверности.
(= половине диаметра трубы достоверности), и это значит, что соответствующая точка находится за пределами трубы достоверности.
Действительно, погрешности соответствуют нормальному закону со средней величиной mean. Тест (сравнение с Zscore) состоит в том, чтобы определить, может ли текущее наблюдение вытекать из этого закона.
Если графически построить распределение для нормального закона, то можно заметить, что превышение шести стандартных отклонений находится в «хвосте» распределения. Вероятность наблюдения чего-либо нормального сверх этого порога стандартных отклонений составляет порядка 10-9.
Аппаратура и система
Аппаратура 3 (показанная на фиг. 1) для осуществления описанного выше способа (оценки нормальности или ненормальности значения уехес, измеренного датчиком 20, физического параметра устройства 1, такого как двигатель летательного аппарата, для значения xexec рабочего параметра указанного устройства 1) содержит средства 31 обработки данных, средства 32 записи данных и интерфейсные средства 33.
Средства 32 записи данных хранят в базе данных множество пар , каждая из которых определяет контрольное значение yi физического параметра для значения xi рабочего параметра.
Средства 31 обработки данных выполнены с возможностью реализации:
- модуля вычисления на основе регрессионной модели, связанной с указанным множеством пар , оценочного значения  физического параметра для значения хехес рабочего параметра;
физического параметра для значения хехес рабочего параметра;
- модуля вычисления соответствующей погрешности resexec;
- модуля вычисления на основе дисперсионной модели, связанной с указанным множеством пар оценочного значения  дисперсии физического параметра для значения хехес рабочего параметра;
дисперсии физического параметра для значения хехес рабочего параметра;
- модуля вычисления вклада аномалии Zscore измеренного значения уехес на основе погрешности resexec, оценочного значения  дисперсии и среднего значения погрешности для указанного множества пар ;
дисперсии и среднего значения погрешности для указанного множества пар ;
- модуля сравнения вклада аномалии Zscore измеренного значения yexec с порогом σ в виде числа стандартных отклонений;
- модуля передачи тревожного сигнала на интерфейсные средства 33, извещающего об идентификации измерения как ненормального, если вклад аномалии Zscore превышает указанный порог σ.
Если аппаратура 3 осуществляет также фазу обучения, то модуль 31 обработки данных выполнен также с возможностью реализации:
- модуля определения указанной регрессионной модели, связанной с указанным множеством пар , при помощи регрессии, моделирующей значение у физического параметра в зависимости от значения х на основании множества  (в случае необходимости, этот модуль конфигурируют таким образом, чтобы сохранять регрессионную модель в средствах 32 хранения данных для будущего использования);
(в случае необходимости, этот модуль конфигурируют таким образом, чтобы сохранять регрессионную модель в средствах 32 хранения данных для будущего использования);
- модуля вычисления для каждой из пар  оценочного значения
оценочного значения  физического параметра и соответствующей погрешности resi,
физического параметра и соответствующей погрешности resi,
- модуля вычисления среднего значения указанных погрешностей resi,
- модуля вычисления в скользящем окне размером w множества значений  дисперсии погрешности;
дисперсии погрешности;
- модуля определения указанной дисперсионной модели, связанной с указанным множеством пар , при помощи регрессии, моделирующей значение var в зависимости от значения х на основании множества  (в случае необходимости, этот модуль конфигурируют таким образом, чтобы сохранять регрессионную модель в средствах 32 хранения данных для будущего использования).
(в случае необходимости, этот модуль конфигурируют таким образом, чтобы сохранять регрессионную модель в средствах 32 хранения данных для будущего использования).
Как было указано выше, предпочтительно аппаратура 3 принадлежит к системе, дополнительно содержащей испытательный стенд 2, содержащий датчик 20, измеряющий значение yexec физического параметра, и выполненный с возможностью установки на нем устройства 1.
Компьютерный программный продукт
Четвертым и пятым объектами изобретения являются компьютерный программный продукт, содержащий командные коды для исполнения (на средствах 31 обработки данных, в частности, аппаратуры 3) способа согласно первому объекту изобретения для оценки нормальности или ненормальности измеренного датчиком 20 значения yexec физического параметра устройства 1 для значения хехес рабочего параметра указанного устройства 1, а также средства хранения данных, считываемые компьютерной аппаратурой (например, средства 32 хранения данных этой аппаратуры 3), на которых записан этот компьютерный программный продукт.
Группа изобретений относится к способу, аппаратуре и системе для оценки нормальности или ненормальности измеренного датчиком физического параметра устройства. Для оценки контрольные значения для рабочего параметра устройства сохраняют в средствах хранения данных, при помощи средств обработки данных вычисляют оценочное значение параметра определенным образом, вычисляют соответствующую погрешность, вычисляют оценочное значение дисперсии физического параметра для значения рабочего параметра, вычисляют вклад аномалии измеренного значения, сравнивают вклад аномалии измеренного значения с порогом, при превышении порога отображают измерение как ненормальное на интерфейсных средствах. Аппаратура содержит средства хранения данных и средства обработки данных для реализации способа. Система содержит испытательный стенд, содержащий датчик и выполненный с возможностью установки на нем устройства, аппаратуру для оценки измеренного параметра. Обеспечивается повышение надежности и эффективности контроля измерения параметров, связанных с двигателем, выявление искажений среди совокупности измерений. 3 н. и 10 з.п. ф-лы, 9 ил.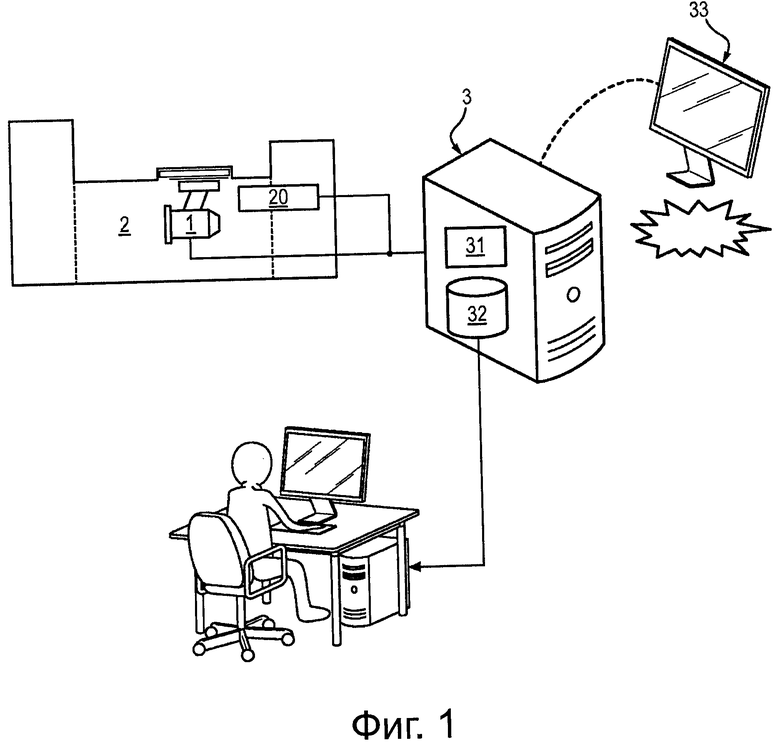
1. Способ оценки нормальности или ненормальности измеренного датчиком (20) значения (yexec) физического параметра устройства (1) для значения (хехес) рабочего параметра указанного устройства (1), характеризующийся тем, что множество пар значений  , каждая из которых определяет контрольное значение (yi) физического параметра для значения (xi) рабочего параметра, сохраняют в базе данных, хранящейся в средствах (32) хранения данных, при этом способ включает осуществление при помощи средств (31) обработки данных этапов, на которых:
, каждая из которых определяет контрольное значение (yi) физического параметра для значения (xi) рабочего параметра, сохраняют в базе данных, хранящейся в средствах (32) хранения данных, при этом способ включает осуществление при помощи средств (31) обработки данных этапов, на которых:
(a) вычисляют оценочное значение  физического параметра для значения (хехес) рабочего параметра на основе регрессионной модели, связанной с указанным множеством пар ;
физического параметра для значения (хехес) рабочего параметра на основе регрессионной модели, связанной с указанным множеством пар ;
(b) вычисляют соответствующую погрешность (resexec);
(c) вычисляют оценочное значение  дисперсии физического параметра для значения (хехес) рабочего параметра на основе дисперсионной модели, связанной с указанным множеством пар ;
дисперсии физического параметра для значения (хехес) рабочего параметра на основе дисперсионной модели, связанной с указанным множеством пар ;
(d) вычисляют вклад аномалии (Zscore) измеренного значения (yexec) на основе погрешности (resexec), оценочного значения дисперсии и среднего значения (mean) погрешности для указанного множества пар значений ;
(e) сравнивают вклад аномалии (Zscore) измеренного значения (yexec) с порогом (σ) в виде числа стандартных отклонений;
(f) если вклад аномалии (Zscore) превышает указанный порог (σ), на интерфейсных средствах (33) отображают измерение как ненормальное.
2. Способ по п. 1, содержащий предварительную фазу обработки указанного множества пар значений из базы данных, включающую осуществление при помощи средств (31) обработки данных этапов, на которых:
(а0) определяют указанную регрессионную модель, связанную с указанным множеством пар значений , при помощи регрессии, моделирующей значение y физического параметра в зависимости от значения х рабочего параметра, на основании множества  , где xi; yi - значения пары, хранящейся в базе данных;
, где xi; yi - значения пары, хранящейся в базе данных;
(a1) для каждой из пар значений вычисляют оценочное значение  физического параметра и соответствующую погрешность (resi);
физического параметра и соответствующую погрешность (resi);
(а2) вычисляют среднее значение (mean) указанных погрешностей (resi);
(а3) в скользящем окне размером w вычисляют множество значений  дисперсии погрешности, каждое из которых связано со значением (xj) рабочего параметра пары значений
дисперсии погрешности, каждое из которых связано со значением (xj) рабочего параметра пары значений  ;
;
(а4) определяют указанную дисперсионную модель, связанную с указанным множеством пар значений  , при помощи регрессии, моделирующей значение var дисперсии погрешности в зависимости от значения х рабочего параметра на основании множества
, при помощи регрессии, моделирующей значение var дисперсии погрешности в зависимости от значения х рабочего параметра на основании множества  , где varj обозначает вычисленное значение дисперсии погрешности, и xj обозначает соответствующее значение рабочего параметра.
, где varj обозначает вычисленное значение дисперсии погрешности, и xj обозначает соответствующее значение рабочего параметра.
3. Способ по п. 2, в котором предварительная фаза включает этап (а5), на котором определяют, в зависимости от указанной определенной модели дисперсии, зоны достоверности вокруг указанной определенной регрессионной модели и отображают указанную зону достоверности на интерфейсных средствах (33).
4. Способ по п. 3, в котором зону достоверности определяют по верхней огибающей, соответствующей формуле  , и нижней огибающей, соответствующей формуле
, и нижней огибающей, соответствующей формуле  , где
, где  является регрессионной моделью, и g является дисперсионной моделью.
является регрессионной моделью, и g является дисперсионной моделью.
5. Способ по одному из пп. 1-4, в котором вклад аномалии (Zscore) получают по формуле  , где resexec обозначает погрешность, связанную с измеренным значением физического параметра,
, где resexec обозначает погрешность, связанную с измеренным значением физического параметра,  обозначает оценочное значение дисперсии, и mean - среднее значение погрешности для указанного множества пар значений
обозначает оценочное значение дисперсии, и mean - среднее значение погрешности для указанного множества пар значений  .
.
6. Способ по одному из пп. 1-5, в котором указанное устройство (1) является двигателем летательного аппарата.
7. Способ по п. 6, в котором указанный физический параметр выбирают из группы, в которую входят связанные с двигателем (1) давление, температура, скорость потока текучей среды, уровень шума и плотность топлива.
8. Способ по п. 6 или 7, в котором указанный рабочий параметр выбирают из группы, в которую входят связанные с двигателем (1) режим, расход топлива, температура топлива, окружающее давление и окружающая температура.
9. Способ по одному из пп. 6-8, в котором двигатель (1) устанавливают на испытательный стенд (2), содержащий датчик (20), при этом на этапе (е) останавливают испытательный стенд (2), если измерение признается ненормальным.
10. Способ по одному из пп. 1-8, в котором на этапе (е) добавляют пару значений (хехес; yexec), образованную измеренным значением физического параметра и соответствующим значением рабочего параметра, в указанную базу данных пар значений  , если измерение не признается ненормальным.
, если измерение не признается ненормальным.
11. Аппаратура (3) для оценки нормальности или ненормальности измеренного датчиком (20) значения (yexec) физического параметра устройства (1) для значения (хехес) рабочего параметра указанного устройства (1), содержащая средства (31) обработки данных, средства (32) хранения данных, хранящие в базе данных множество пар значений  , каждая из которых определяет контрольное значение yi физического параметра для значения xi рабочего параметра, и интерфейсные средства (33), при этом средства (31) обработки данных выполнены с возможностью реализации:
, каждая из которых определяет контрольное значение yi физического параметра для значения xi рабочего параметра, и интерфейсные средства (33), при этом средства (31) обработки данных выполнены с возможностью реализации:
- модуля вычисления оценочного значения  физического параметра для значения хехес рабочего параметра на основе регрессионной модели, связанной с указанным множеством пар значений
физического параметра для значения хехес рабочего параметра на основе регрессионной модели, связанной с указанным множеством пар значений  ;
;
- модуля вычисления соответствующей погрешности (resexec);
- модуля вычисления оценочного значения  дисперсии физического параметра для значения (хехес) рабочего параметра на основе дисперсионной модели, связанной с указанным множеством пар значений
дисперсии физического параметра для значения (хехес) рабочего параметра на основе дисперсионной модели, связанной с указанным множеством пар значений  ;
;
- модуля вычисления вклада аномалии (Zscore) измеренного значения (yexec) на основе погрешности (resexec), оценочного значения дисперсии и среднего значения (mean) погрешности для указанного множества пар значений ;
- модуля сравнения вклада аномалии (Zscore) измеренного значения (yexec) с порогом (σ) в виде числа стандартных отклонений;
- модуля передачи тревожного сигнала на интерфейсные средства (33), извещающего об идентификации измерения как ненормального, если вклад аномалии (Zscore) превышает указанный порог (σ).
12. Аппаратура по п. 10, в которой модуль (31) обработки данных выполнен также с возможностью реализации:
- модуля определения указанной регрессионной модели, связанной с указанным множеством пар значений , при помощи регрессии, моделирующей значение y физического параметра в зависимости от значения х рабочего параметра на основании множества  , где xi; yi - значения пары, хранящиеся в базе данных;
, где xi; yi - значения пары, хранящиеся в базе данных;
- модуля вычисления для каждой из пар значений оценочного значения физического параметра и соответствующей погрешности (resi);
- модуля вычисления среднего значения (mean) указанных погрешностей (resi);
- модуля вычисления в скользящем окне размером w множества значений  дисперсии погрешности, каждое из которых связано со значением (xj) рабочего параметра пары
дисперсии погрешности, каждое из которых связано со значением (xj) рабочего параметра пары  ;
;
- модуля определения указанной дисперсионной модели, связанной с указанным множеством пар значений  , при помощи регрессии, моделирующей значение var в зависимости от значения х на основании множества
, при помощи регрессии, моделирующей значение var в зависимости от значения х на основании множества  , где
, где  обозначает вычисленное значение дисперсии погрешности, и xj обозначает соответствующее значение рабочего параметра.
обозначает вычисленное значение дисперсии погрешности, и xj обозначает соответствующее значение рабочего параметра.
13. Система для оценки нормальности или ненормальности измеренного датчиком (20) значения (yexec) физического параметра устройства (1) для значения (хехес) рабочего параметра указанного устройства (1), содержащая:
- испытательный стенд (2), содержащий датчик (20) и выполненный с возможностью установки на нем устройства (1);
- аппаратуру (3) по п. 10 или 11 для оценки нормальности или ненормальности измеренного датчиком (20) значения (yexec) физического параметра указанного устройства (1) для значения (хехес) рабочего параметра указанного устройства (1).
| US 20130179097 A1, 11.07.2013 | |||
| US 7072797 B2, 04.07.2006 | |||
| US 20090112519 A1, 30.04.2009 | |||
| RU 2011129339 A, 20.01.2013 | |||
| КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ЗА СОСТОЯНИЕМ ИЗДЕЛИЯ ИЗ УДАЛЕННОГО ПУНКТА | 2002 |
|
RU2282940C2 |

