Уровень техники
Изобретение относится к общей области аэронавтики.
В частности, оно относится к контролю ракетного двигателя.
Как известно, системы ракетных двигателей предназначены для работы в широком рабочем диапазоне и оснащены средствами проверки их нормальной работы.
Проверку осуществляют, с одной стороны, в реальном времени, чтобы убедиться, что рабочие параметры двигателя (например, давление и температура двигателя, и т.д.) остаются в заранее определенных допустимых пределах, и, с другой стороны, в отложенное время, сравнивая измерения рабочих параметров, произведенные во время испытаний на двигателе, с заранее определенными прямолинейными контрольными шаблонами, при этом при выходе из шаблона выявляется ошибка измерения или двигателя.
Выбор параметров (то есть определение) пределов и контрольных шаблонов осуществляют вручную, что чревато риском ошибки, в частности, когда этот выбор параметров не согласуется с рабочей точкой двигателя. Кроме того, изменение профиля и условий испытания двигателя вынуждает осуществлять трудоемкую и чреватую рисками корректировку пределов и контрольных шаблонов.
Объект и сущность изобретения
Изобретение предназначено для устранения этих недостатков и для создания способа контроля параметра ракетного двигателя. Способ содержит:
- этап получения измерения контролируемого параметра, осуществляемого датчиком и соответствующего рабочей точке двигателя, причем эту рабочую точку определяют по меньшей мере по одному параметру регулирования двигателя;
- этап оценки значения контролируемого параметра для этой рабочей точки на основании регулируемого значения или фильтрованного заданного значения указанного по меньшей мере одного параметра регулирования, определяющего рабочую точку;
- этап сравнения ошибки между измерением контролируемого параметра и его оценкой относительно по меньшей мере одного порога, определенного на основании погрешности на этой ошибке, оцененной для рабочей точки; и
- этап передачи уведомления в случае перехода указанного по меньшей мере одного порога.
Соответственно изобретением предложено устройство контроля рабочего параметра ракетного двигателя, содержащее:
- модуль получения измерения контролируемого параметра, осуществляемого датчиком и соответствующего рабочей точке двигателя, причем эту рабочую точку определяют по меньшей мере по одному параметру регулирования двигателя;
- модуль оценки значения контролируемого параметра для этой рабочей точки на основании регулируемого значения или фильтрованного заданного значения указанного по меньшей мере одного параметра регулирования, определяющего рабочую точку;
- модуль сравнения ошибки между измерением контролируемого параметра и его оценкой относительно по меньшей мере одного порога, определенного на основании погрешности на этой ошибке, оцененной для рабочей точки; и
- модуль передачи уведомления в случае перехода указанного по меньшей мере одного порога.
Под переходом порога ошибкой следует понимать, что ошибка превышает порог, если он определяет верхний предел, который нельзя превышать, или что ошибка ниже порога, если он определяет нижний предел, который нельзя переходить.
Кроме того, следует отметить, что этап сравнения ошибки можно осуществлять в рамках изобретения разными способами, доступными для специалиста в данной области. Так, например, ошибку можно определить как абсолютное значение разности между измерением контролируемого параметра и его оценкой или просто как разность между измерением контролируемого параметра и его оценкой. Кроме того, во время этого этапа ошибку можно оценить, затем сравнить с порогом или, в варианте, измерение контролируемого параметра можно сравнить с оценкой, к которой был добавлен (или, возможно, из которой был вычтен) порог, и т.д. Этот этап сравнения является эквивалентным, независимо от способа его осуществления, сравнению измерения контролируемого параметра с шаблоном, определенным на основании оценки контролируемого параметра и порога.
Изобретением предложен также контроль параметров ракетного двигателя, который изменяется динамично и автоматически вместе рабочей точкой этого двигателя. Контролируемыми параметрами, например, являются:
- давление двигателя; и/или
- температура двигателя; и/или
- скорость вращения элемента двигателя; и/или
- расход текучей среды, циркулирующей в двигателе; и/или
- вибрационное поведение двигателя.
Рабочую точку двигателя определяют на основании одного или нескольких параметров, используемых для регулирования двигателя. Такими параметрами регулирования являются, например, давление в камере сгорания двигателя, соотношение смеси (кислород/водород) на входе насоса двигателя, скорость вращения кислородного турбонасоса, скорость вращения водородного турбонасоса и т.д. Регулирование (то есть контроль) этих параметров регулирования осуществляют в замкнутом контуре во время работы двигателя, что само по себе известно, при помощи системы регулирования, выполненной с возможностью воздействия на различные переменные геометрии двигателя, например, такие как положение регулировочных вентилей, таких как клапаны VBPO (кислородный перепускной клапан) и VBPH (водородный перепускной клапан).
Предпочтительно предложенный изобретением контроль адаптирован к динамичному и нелинейному характеру систем ракетного двигателя, причем этот характер связан, в частности, с изменением в зависимости от времени заданных значений регулирования двигателя, причем система регулирования ограничивает эти заданные значения по величине и по градиенту. Для этого он опирается на оценку контролируемого параметра или контролируемых параметров (например, посредством моделирования или при помощи моделей) на основании регулируемого и, следовательно, подтвержденного значения параметров регулирования, чтобы ограничить погрешности, связанные, в частности, с клапанами, и обнаруживать аномалии, влияющие только на двигатель, или на основании фильтрованного заданного значения параметров регулирования таким образом, чтобы обнаруживать аномалии, затрагивающие всю цепь на выходе контура регулирования, то есть влияющие не только на двигатель, но также на приводы, позволяющие управлять переменными геометриями двигателя. Затем полученную таким образом оценку сравнивают с измерением контролируемого параметра, автоматически учитывая определенный порог в зависимости от рабочей точки двигателя. Порог определяют, в частности, на основании погрешностей измерения и оценки контролируемого параметра, встречающихся в рабочей точке.
Таким образом, в отличие от известных решений изобретение основано не на заранее определенном контрольном шаблоне или на заранее определенных пределах, с которым(и) сравнивают измерение контролируемого параметра. Наоборот, оно динамично и автоматически определяет пределы и/или контрольный шаблон ракетного двигателя на основании оценки контролируемых параметров и точности измерения и оценки (типовое отклонение), которые определяют с учетом рабочей точки двигателя.
В частном варианте осуществления рабочую точку, используемую для определения погрешности на ошибке, определяют на основании регулируемого значения указанного по меньшей мере одного параметра регулирования.
Этот вариант осуществления опирается на точную оценку рабочей точки. Он позволяет контролировать ракетный двигатель как в устоявшемся режиме, так и в переходном режиме. Действительно, он позволяет избегать в переходном режиме задержек, которые являются иногда существенными и могут возникать между измерениями параметров регулирования и заданными значениями этих параметров во время регулирования.
В варианте рабочую точку, используемую для определения погрешности на ошибке, определяют на основании фильтрованного заданного значения указанного по меньшей мере одного параметра регулирования (которое опережает реальную рабочую точку двигателя).
Следует отметить, что во время контроля можно учитывать несколько порогов (например, если погрешность на ошибке в зависимости от рабочей точки двигателя обозначить σ, то можно рассматривать верхние и нижние пороги при +/-3σ и при +/-6σ), при этом каждый порог может быть связан с ответом на отдельное и соответствующее переданное уведомление в зависимости от серьезности обнаруженной аномалии (например, включение тревожного сигнала, действие обслуживания на двигателе, остановка двигателя и т.д.).
Таким образом, обеспечиваемый изобретением контроль позволяет обнаруживать аномалии, влияющие на ракетный двигатель, как в реальном времени, так и в отложенное время. Следовательно, устройство контроля можно расположить в том же блоке, что и устройство регулирования двигателя (например, в вычислительном устройстве максимально близко к двигателю), или в другом блоке на борту ракеты, приводимой в движение двигателем (например, в бортовом компьютере), или на стенде испытания ракетного двигателя.
В предпочтительном варианте осуществления этап оценки значения контролируемого параметра осуществляют при помощи искусственной нейронной сети, входом которой является регулируемое значение или фильтрованное заданное значение указанного по меньшей мере одного параметра регулирования двигателя.
Использование нейронной сети позволяет легче воспроизводить нелинейное поведение системы ракетного двигателя, причем при любом профиле этого нелинейного поведения и при любой сложности системы.
Кроме того, использование искусственной нейронной сети позволяет достичь компромисса между точностью оценки и вычислительной нагрузкой, что позволяет применять изобретение в реальном времени. Действительно, при использовании такой модели число вычислений, необходимых для оценки значения контролируемого параметра, уменьшается.
В этом варианте осуществления погрешность на ошибке может учитывать, в частности, погрешность оценки контролируемого параметра, определяемую в зависимости:
- погрешности на входе нейронной сети; и/или
- погрешности на нейронной сети; и/или
- погрешности на базе обучения, используемой для построения нейронной сети.
В варианте можно использовать другие оценочные функции, отличные от нейронной сети, например, нелинейную оценочную функцию, устанавливаемую в режиме офлайн и основанную на нелинейной регрессии, и т.д.
Авторы изобретения установили, что при резких изменениях заданных значений параметра регулирования ошибка между измерением контролируемого параметра и его оценкой может очень близко подойти к определенному порогу в соответствии с изобретением. Чтобы повысить надежность способа контроля по отношению к феномену этого типа, в частном варианте осуществления изобретения можно дополнительно учитывать на этапе сравнения динамику изменения рабочей точки двигателя, в частности, таким образом, чтобы определить более широкий шаблон вокруг измерения контролируемого параметра в случае резких переходов рабочей точки двигателя.
Этот шаблон может быть, например, определен:
- верхней границей, полученной путем умножения оценки контролируемого параметра на переходную характеристику заранее определенного фильтра 2-го порядка, моделирующего резкие изменения заданного значения или фильтрованного заданного значения параметра или параметров регулирования, и добавления к результату этой операции ранее определенной погрешности; и/или
- нижней границей, полученной путем умножения оценки контролируемого параметра на переходную характеристику заранее определенного фильтра 1-го порядка, моделирующего плавные изменения заданного значения или фильтрованного заданного значения параметра или параметров регулирования, и вычитания из результата этой операции ранее определенной погрешности.
Иначе говоря, эквивалентно сравнивают:
- на первом пороге, называемом верхним порогом, ошибку между измерением контролируемого параметра и его оценкой, взвешенной ответом заранее определенного фильтра 2-го порядка, с единичной ступенчатой функцией, характеризующей заданное значение или фильтрованное заданное значение указанного по меньшей мере одного контролируемого параметра; и
- на втором пороге, называемом нижним порогом, ошибку между измерением контролируемого параметра и его оценкой, взвешенной ответом заранее определенного фильтра 1-го порядка, с указанной единичной ступенчатой функцией,
при этом результатом перехода одного или другого из порогов является передача уведомления о переходе порога.
В частном варианте осуществления различные этапы способа контроля определены командами компьютерных программ.
Следовательно, объектом изобретения является также компьютерная программа на носителе информации, причем эту программу можно применять в устройстве контроля или, в целом, в компьютере или в вычислительном устройстве, при этом программа содержит команды, предназначенные для осуществления этапов описанного выше способа контроля.
Эта программа может использовать любой язык программирования и может быть выполнена в виде кода источника, кода объекта или промежуточного кода между кодом источника и кодом объекта, как в частично компилированном виде, так и в любом другом необходимом виде.
Объектом изобретения является также носитель информации, считываемый компьютером и содержащий команды вышеупомянутой компьютерной программы.
Носитель информации может быть любым средством или устройством, выполненным с возможностью записи и хранения программы. Например, носитель может содержать средство хранения, такое как ROM, например, CD-ROM, или ROM микроэлектронной схемы, или магнитное средство записи, например, дискета (floppy disk) или жесткий диск.
С другой стороны, носитель информации может быть передаваемым носителем, таким как электрический или оптический сигнал, который можно передавать по электрическому или оптическому кабелю, по радио или другими средствами. В частности, заявленную программу можно загружать дистанционно из сети типа Интернет.
В альтернативном варианте носитель информации может быть интегральной схемой, в которую включена программа, при этом схема выполнена с возможностью осуществления или использования при осуществлении рассматриваемого способа.
Объектом изобретения является также ракетный двигатель, содержащий заявленное устройство контроля.
В других вариантах выполнения заявленные способ контроля, устройство контроля и ракетный двигатель могут иметь в комбинации все или часть вышеупомянутых отличительных признаков.
Кроме того, необходимо отметить, что заявленный способ контроля модно применять к другим регулируемым системам, отличным от ракетного двигателя, например, для авиационного двигателя.
Краткое описание чертежей
Другие признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания со ссылками на прилагаемые чертежи, которые иллюстрируют примеры, не имеющие ограничительного характера, и на которых:
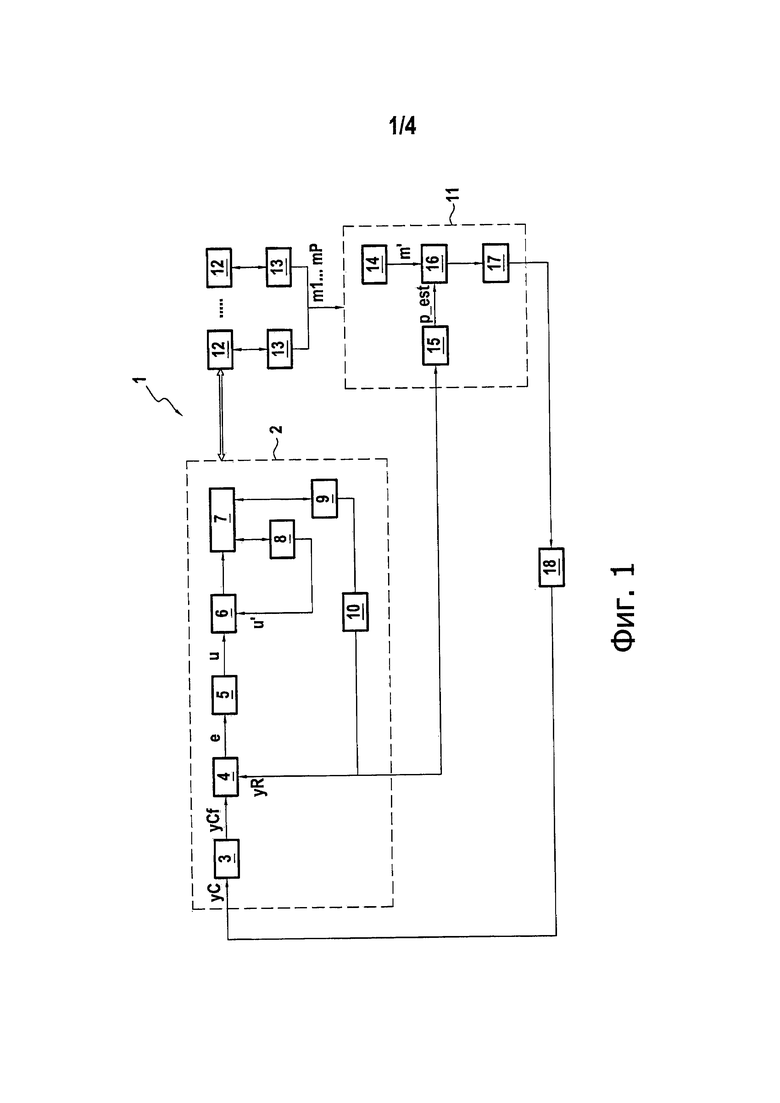
фиг. 1 - схема ракетного двигателя, содержащего заявленное устройство контроля согласно частному варианту выполнения;
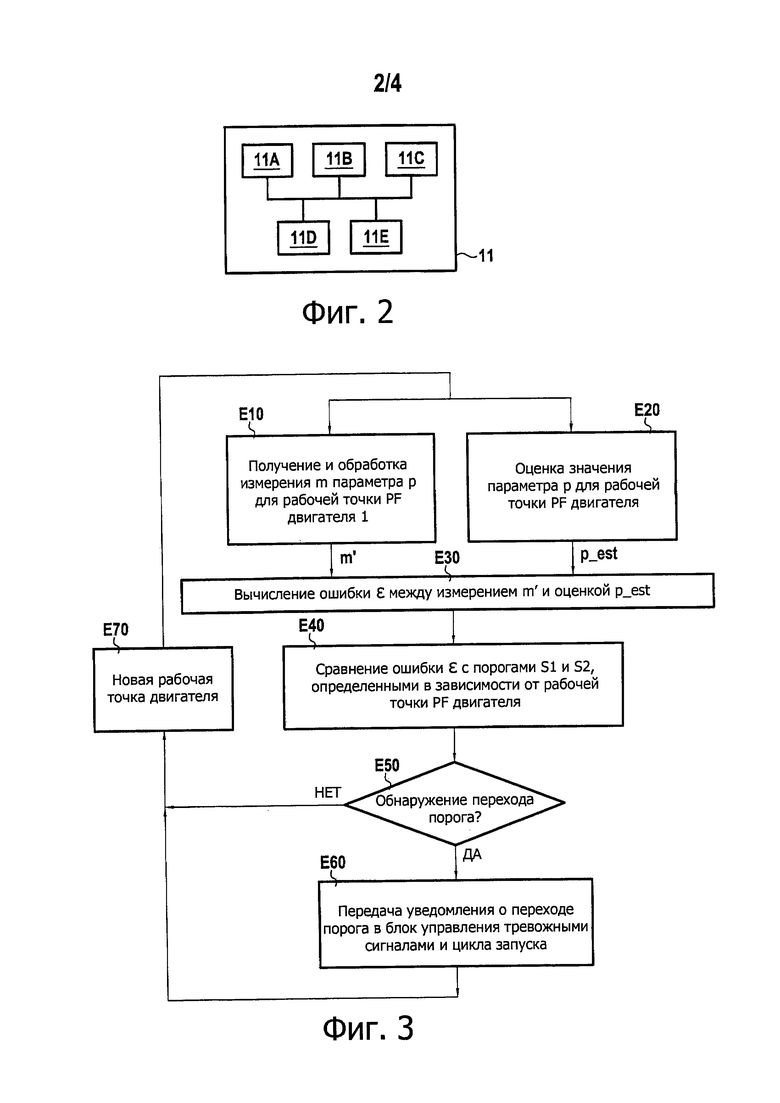
фиг. 2 - схема материальной архитектуры устройства контроля, показанного на фиг. 1;
фиг. 3 - блок-схема основных этапов заявленного способа контроля, осуществляемых устройством контроля, показанным на фиг. 1;
фиг. 4 - искусственная нейронная сеть, используемая устройством контроля, показанным на фиг. 1;
фиг. 5 - пример таблицы значений, которую можно использовать в рамках способа контроля, представленного на фиг. 3;
фиг. 6 - пример изменений измерения и оценки давления PSPO системы, контролируемой устройством контроля, показанным на фиг. 1;
фиг. 7 - пример изменения в зависимости от времени порогов, рассматриваемых устройством контроля во втором варианте выполнения изобретения
Осуществление изобретения
На фиг. 1 схематично показан ракетный двигатель в своей окружающей среде, для которого предусмотрен контроль в соответствии с изобретением, в частном варианте выполнения.
Как известно, в ракетном двигателе используют жидкие водород и кислород, которые сгорают в камере сгорания во время работы двигателя. В рассматриваемом примере подачу водорода и кислорода контролируют при помощи клапанов регулирования, питающих турбонасосы.
Клапаны регулирования позволяют регулировать, в частности, расход кислорода и водорода, скорость турбин и т.д. Ими управляют приводы, и их положениями управляет вычислительное устройство, например, вычислительное устройство или контроллер ракетного двигателя. Для этого вычислительное устройство использует различные параметры регулирования двигателя, например, такие как давление в камере сгорания, обозначаемое PGC, соотношение смеси кислород/водород на входе насоса, обозначаемое RMEP, скорость вращения кислородного и водородного турбонасосов и т.д.
Принцип работы системы 2 регулирования схематично представлен на фиг. 1. Следует отметить, что в примере, показанном на фиг. 1, предполагается, что логику регулирования осуществляет вычислительное устройство ракетного двигателя 1. Вместе с тем, это предположение не является ограничительным, и эту логику регулирования может осуществлять любое другое вычислительное устройство на борту ракеты, например, бортовой компьютер, управляющий ракетой (известный также под названием ОВС от английского выражения "On Board Computer").
Система 2 регулирования работает в замкнутом контуре. В частности, вычислительное устройство известным образом создает заданное значение yC для каждого параметра регулирования двигателя и передает его в фильтр 3 динамики отслеживания. Фильтрованное значение yCf, полученное на выходе фильтра 3, поступает в модуль 4 вычисления ошибки, в который поступает также регулируемое значение yR параметра регулирования. Ошибка е, оцениваемая модулем 4, поступает в корректирующий модуль 5 ракетного двигателя, который оценивает команду и, предназначенную для коррекции ошибки е (то есть для ее устранения). Команда и является командой положения регулировочного клапана, позволяющей скорректировать значение параметра регулирования таким образом, чтобы он соответствовал заданному значению. Команда u передается в корректирующий модуль 6, управляющий приводом 7 регулировочного клапана в зависимости от команды u. Датчик 8 положения управляемого таким образом регулировочного клапана выдает в корректирующий модуль 6 измерение u' положения регулировочного клапана.
Кроме того, ракетный двигатель 1 может быть снабжен датчиком 9, позволяющим измерить «регулируемое» значение параметра регулирования или оценить его на основании положения u' клапана, измеренного датчиком 8. Этот датчик 9 является, например, датчиком давления, датчиком скорости, датчиком положения, расходомером и т.д. в зависимости от рассматриваемого параметра регулирования. После подтверждения модулем 10 подтверждения вычислительного устройства (выполненным с возможностью устранения аберрантных значений) регулируемое значение поступает в модуль 4 вычисления ошибки для адаптации команды u с целью ее приведения к заданному значению yC, и т.д. Работа системы 2 регулирования известна специалисту в данной области, и ее более подробное описание опускается.
Нормальную работу ракетного двигателя 1 обеспечивают при помощи заявленного устройства 11 контроля. Это устройство 11 контроля выполнено с возможностью контроля одного или нескольких органов или элементов 12 ракетного двигателя 1 на основании измерений m1, …mP, поступающих от известных датчиков 13, выполненных с возможностью измерения различных параметров p1, …pP двигателя в его разных рабочих точках, при этом Р обозначает любое целое число, превышающее или равное 1. Этими параметрами, контролируемыми устройством 11 контроля, например, являются:
- давление на выходе насосов двигателя;
- температура реактивного сопла;
- скорость вращения турбонасосов;
- расход текучих сред (кислорода, водорода) на входе насосов двигателя;
- вибрационное поведение двигателя;
- и т.д.
Для упрощения дальнейшего описания будет рассмотрен только один параметр, обозначенный р и контролируемый устройством 11 контроля (то есть Р=1), например, давление на выходе кислородного насоса двигателя 1, обозначаемое PSPO. Однако ни число Р параметров двигателя, контролируемых устройством 11 контроля, ни характер этих параметров не связаны никакими ограничениями.
Каждая рассматриваемая рабочая точка ракетного двигателя 1 определена значением одного или нескольких параметров регулирования, используемых системой 2 регулирования, как было указано выше. В рассматриваемом примере каждая рассматриваемая рабочая точка двигателя определена парой параметров регулирования, а именно парой, образованной значением давления камеры сгорания PGC и значением соотношения смеси кислород/водород на входе насосов RMEP.
Однако это предположение не является ограничительным, и дополнительно к вышеупомянутым параметрам или вместо них можно рассматривать другие параметры регулирования для определения рабочей точки ракетного двигателя 1, например, такие как скорость вращения кислородного и водородного турбонасосов. Можно даже рассматривать только один параметр регулирования.
В описанном варианте выполнения устройство 11 контроля включено в ракетный двигатель 1 и, в частности, в его вычислительное устройство или контроллер, что позволяет легко осуществлять контроль в реальном времени и во время полета ракетного двигателя 1. Оно основано на материальной архитектуре вычислительного устройства, которое в представленном варианте выполнения является вычислительным устройством компьютера, как схематично показано на фиг. 2.
Таким образом, устройство 11 контроля содержит процессор 11А, постоянную память 11В, оперативную память 11С, энергонезависимую память 11D и средства 11Е связи с различными элементами вычислительного устройства и ракетного двигателя 1, такими как датчики 13 и система 2 регулирования. Эти средства 11Е связи включают в себя, например, шину передачи данных.
Постоянная память 11В устройства 11 контроля представляет собой носитель записи, считываемый процессором 11А, на котором записана компьютерная программа в соответствии с изобретением, содержащая команды для осуществления этапов заявленного способа контроля, которые будут описаны ниже со ссылками на фиг. 3-5 в частном варианте осуществления.
Эта компьютерная программа эквивалентно образует функциональные модули (в данном случае программные модули) устройства 11 контроля, такие как модуль 14 получения измерений контролируемых параметров, модуль 15 оценки значений этих параметров, модуль 16 сравнения измерений и оценочных значений и активируемый в случае необходимости модуль 17 передачи уведомления о переходе порога. Функции этих различных модулей описаны более подробно в рамках описания этапов способа контроля.
В другом варианте выполнения устройство 11 контроля установлено на стенде испытания ракетного двигателя или включено в бортовой компьютер ракеты (в вышеупомянутый ОВС). Оборудование, в котором установлено устройство 11 контроля, не связано никакими ограничениями. В частности, система 2 регулирования и устройство 11 контроля могут быть установлены в разных блоках.
Далее со ссылками на фиг. 3 следует описание основных этапов способа контроля, осуществляемого устройством 11 контроля в частном варианте осуществления изобретения.
Как было указано выше, устройство 11 контроля осуществляет контроль ракетного двигателя 1 на основании измерений параметра р, производимых одним из датчиков 13, которыми оснащен двигатель, для разных рабочих точек этого двигателя. Такое измерение m параметра р (или, в целом, m1, …, mP параметров p1, …, pP, если в соответствии с изобретением контролируют Р параметров) получает от датчика 13 модуль 14 получения измерений устройства 11 контроля через средства 11Е связи устройства контроля для рабочей точки PF ракетного двигателя 1 (этап Е10).
В описанном варианте осуществления модуль 14 получения измерений выполнен с возможностью обработки измерений, получаемых от датчика 13 и, в частности, их фильтрации и, в случае необходимости, устранения ошибочных значений. Такие применяемые виды обработки являются классическими, и их описание опускается. Они позволяют избегать, в частности, метрологических проблем.
Модуль 14 получения измерений сохраняет в оперативной памяти 11С устройства 11 контроля измерение m' параметра р, получаемое в результате обработки измерения m.
Кроме того (параллельно или после этапа Е10), модуль 15 оценки устройства 11 контроля оценивает значение контролируемого параметра р для рабочей точки PF (этап Е20). Для этого он использует оценочную функцию, построенную на основании базы данных обучения и моделирующую нелинейное поведение ракетного двигателя 1. Эта оценочная функция получает на входе значение рабочей точки PF и выдает на выходе оценку p_est параметра р для этого значения рабочей точки PF. В описанном варианте осуществления рабочая точка PF на входе оценочной функции определена регулируемыми значениями yR параметров регулирования PGC и RMEP.
В другом варианте осуществления рабочая точка PF на входе оценочной функции определена фильтрованными заданными значениями yCf параметров регулирования.
В данном случае базу данных обучения, используемую для построения оценочной функции, получают из математической модели, подкрепленной экспериментальными данными. Получение такой базы данных обучения не представляет труда для специалиста в данной области, поэтому его описание опускается.
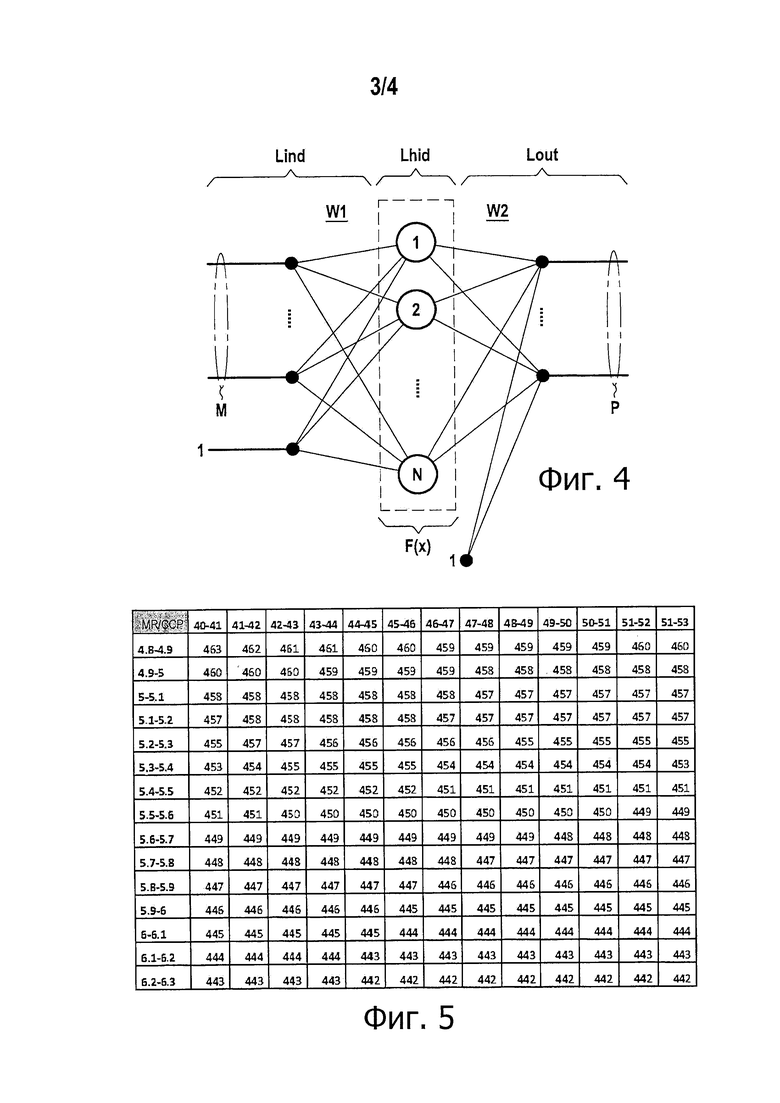
В описанном варианте осуществления оценочная функция, используемая модулем 15 оценки, является искусственной нейронной сетью RNA, построенной на основании базы данных обучения. Эта нейронная сеть показана на фиг. 4.
В частности, рассматриваемая нейронная сеть RNA является сетью типа РМС (многослойный персептрон) без обратной связи, содержащей входной слой Lin, выходной слой Lout и один или несколько последовательных промежуточных слоев, называемых скрытыми слоями Lhid. Для упрощения на фиг. 4 показан только один скрытый слой.
Входной слой Lin содержит М+1 входов (или нейронов), образующих вектор [Vin, 1] где Vin обозначает размерный вектор М, содержащий М параметров регулирования, определяющих рассматриваемую рабочую точку ракетного двигателя. М является целым числом, превышающим или равным 1. В рассматриваемом примере входной слой Lin, кроме унитарного входа, содержит М=2 входов, соответствующих давлению PGC камеры сгорания и соотношению RMEP смеси на входе насоса двигателя соответственно.
Выходной слой Lout сети содержит Р выходов (или нейронов), образующих вектор Vout, соответствующий оценкам Р параметров, контролируемых устройством 11 контроля. Р является целым числом, превышающим или равным 1. В рассматриваемом примере Р=1.
Скрытый слой Lhid содержит N нейронов, где N обозначает целое число, превышающее или равное 1. В данном случае он основан на функции F(x) типа сигмоидальной F(x) функции с реальным векторным выходом с N размерами, определяемой как:
В варианте можно предусмотреть другие сигмоидальные функции.
Таким образом, выходной вектор Vout нейронной сети вычисляют по формуле:
где W1 обозначает матрицу синаптических весов между входным слоем Lin и скрытым слоем Lhid, при этом последний столбец этой матрицы отображает смещения нейронов скрытого слоя, и W2 обозначает матрицу синаптических весов между скрытым слоем Lhid и выходным слоем Lout, при этом последний столбец этой матрицы отображает смещения нейронов выходного слоя.
Синаптические веса и смещения, содержащиеся в матрицах W1 и W2, получают для ракетного двигателя 1 при помощи алгоритма автоматического обучения, основанного на методе сопряженных градиентов и применяемого к базе данных обучения, который известен специалисту и описание которого опускается. В варианте для построения нейронной сети RNA на основании базы данных обучения можно применять другие известные алгоритмы обучения.
В примере, представленном на фиг. 4, показан только один скрытый слой Lhid, имеющий N нейронов. Число скрытых слоев и число нейронов на один скрытый слой можно оптимизировать для получения сети заданной точности, причем эту точность можно измерить, например, при помощи критерия среднеквадратичной ошибки. В варианте можно также учитывать другие критерии, например, такие как время вычисления, необходимое для оценки параметра при помощи нейронной сети и т.д., в случае необходимости, взвешенные в зависимости от их относительной значимости.
Кроме того, можно предусмотреть другие архитектуры нейронных сетей, например, такие как архитектуры с обратной связью.
В варианте для оценки значения контролируемого параметра р можно использовать другие нелинейные модели, отличные от искусственной нейронной сети, например, нелинейную модель, построенную в режиме офлайн с использованием нелинейной регрессии на основании структурных соотношений, существующих между контролируемыми параметрами и параметрами регулирования. Такие структурные соотношения сами по себе известны или их можно определить экспериментально и/или на основании базы данных обучения.
Как показано на фиг. 3, измерение m' и оценку p_est параметра р выдают соответственно модуль 14 получения измерений и модуль 15 оценки в модуль 16 сравнения устройства 11 контроля.
По получении этих значений модуль 16 сравнения оценивает на первой стадии ошибку ε между измерением m' и оценкой p_est контролируемого параметра р (этап Е30) по формуле:
ε=|m'-p_est|
где |m'-p_est| обозначает абсолютное значение разности между измерением m' и оценкой p_est.
Затем он сравнивает ошибку ε с одним или несколькими порогами S1, …, SK, где К обозначает целое число, превышающее или равное 1 (этап Е40).
Согласно изобретению, модуль 16 сравнения устройства 11 контроля определяет пороги S1, …, SK на основании погрешности σ (то есть стандартного отклонения) на. оценочной ошибке ε для рассматриваемой рабочей точки PF ракетного двигателя 1, то есть для рабочей точки ракетного двигателя 1, в которой было получено измерение m и для которой была произведена оценка значения p_est. Например, устройство 11 контроля рассматривает два разных порога S1=3σ и S2=6σ (или эквивалентно, если рассматривать ошибку ε=m'-p_est, пороги S1=+/-3σ и S2=+/-6σ).
Эти примеры представлены всего лишь в качестве иллюстрации, и, разумеется, можно предусмотреть другие множители для погрешности σ в зависимости от аномалий, которые необходимо обнаруживать. Выбор порогов связан с необходимостью достаточно раннего обнаружения отклонений элементов ракетного двигателя 1 (включая используемые датчики), а также, чтобы избежать ложных тревожных сигналов, что будет подробнее описано ниже.
В представленном варианте погрешность σ учитывает два фактора, а именно погрешность σ1 в измерении параметра р и погрешность σ2 в оценке p_est параметра р. В частности:

В варианте погрешность σ можно вывести из погрешностей σ1 и σ2, используя функцию, отличную от квадратичной суммы.
Погрешность σ1 при измерении m параметра р известна для данного датчика. Например, ее можно определить из спецификаций, представленных изготовителем датчика 13 (и, возможно, подтвердить в ходе тестирования датчика). Следует отметить, что эта погрешность (или, что эквивалентно, неточность измерения датчика) не обязательно является постоянной во всем диапазоне работы ракетного двигателя 1, но может меняться в зависимости от рабочей точки двигателя. Таким образом, в данном случае для оценки погрешности σ1 устройство 11 контроля использует таблицу ТАВ1 значений, составленную заранее, в частности, на основании спецификаций изготовителя датчика 13 и дающую для разных значений пары (PGC, RMEP), определяющей рабочую точку PF, результирующее значение погрешности σ1.
Погрешность σ2 в оценке p_est параметра р зависит в данном случае от нескольких источников погрешности, в частности, таких как:
- погрешность (или эквивалентно, наоборот, точность) в данных, поступающих на вход оценочной функции, применяемой модулем 15 оценки, и, в частности, регулируемых значений параметров PGC и RMEP регулирования. Действительно, точность замкнутого контура, применяемого системой 2 регулирования, зависит от измерения параметра или параметров регулирования датчиком 9 и от ширины зоны, в которой ошибку между фильтрованным заданным значением yCf и измерением yR приводят к нулю, чтобы избежать нелинейной нестабильности (предельный цикл) на уровне приводов 7 (связанной с пределом их разрешения);
- погрешность (или эквивалентно, наоборот, точность) в применяемой оценочной функции, то есть в данном случае искусственной нейронной сети RNA, которая не является идентично нулевой, а зависит от рабочей точки двигателя. Точность оценочной функции характеризует ее способность точно воспроизводить базу данных обучения, на основании которой ее получают; и
- погрешность (или эквивалентно, наоборот, точность) в базе данных обучения, используемой для построения оценочной функции, то есть в данном случае искусственной нейронной сети RNA. Оценочная функция может иметь высокую точность, но вместе с тем значение параметра, оцениваемого при помощи этой оценочной функции, может отличаться от измерения этого параметра, если база данных обучения не является надежной, например, когда эта база данных обучения сама получена из математической модели. В этом случае во время построения оценочной функции можно применить смещение, чтобы учитывать разность между реальным двигателем и его моделированием при помощи базы обучения, чтобы ограничить эту погрешность.
В представленном варианте для оценки погрешности σ2, вытекающей из комбинации вышеупомянутых погрешностей, устройство 11 контроля использует таблицу ТАВ2 значений, определенную, например, посредством моделирования при помощи классического метода Монте-Карло, известного специалисту в данной области.
На фиг. 5 представлен пример такой таблицы значений ТАВ2. Этот пример представлен исключительно в качестве иллюстрации.
Таблица ТАВ2 дает для разных значений пары параметров регулирования (PGC, RMEP) результирующее значение погрешности σ2 (в единицах контролируемого параметра, то есть в представленном примере в барах, поскольку контролируемым параметром является давление). В примере, показанном на фиг. 5, область значений параметров регулирования PGC и RMEP была произвольно разделена на 195 подобластей (для упрощения показаны не все эти подобласти), в каждой из которых были произведены сортировки в соответствии с методом Монте-Карло. Рассматриваемое число областей зависит от компромисса между сложностью и однородностью значения погрешности внутри одной области.
В варианте погрешность σ2 можно оценить при помощи искусственной нейронной сети вместо использования таблицы, такой как таблица ТАВ2.
Таким образом, модуль 16 сравнения устройства контроля извлекает из вышеупомянутых таблиц ТАВ1 и ТАВ2 погрешности σ1 и σ2, соответствующие рассматриваемой рабочей точке PF ракетного двигателя 1. Для этого в качестве параметров регулирования PGC и RMEP, определяющих эту рабочую точку PF, используют регулируемые и подтвержденные значения yR параметров регулирования PGC и RMEP.
В варианте осуществления в качестве рабочей точки PF для извлечения погрешностей σ1 и σ2 соответственно из таблиц ТАВ1 и ТАВ2 модуль 16 сравнения использует фильтрованные заданные значения yCf этих параметров регулирования (то есть получаемые на выходе фильтра 3 динамики отслеживания)
В еще одном варианте осуществления в качестве рабочей точки PF для извлечения погрешностей σ1 и σ2 из таблиц ТАВ1 и ТАВ2 соответственно модуль 16 сравнения использует заданные значения yC, зафиксированные системой 2 регулирования для этих параметров регулирования.
Затем на основании погрешностей σ1 и σ2 он оценивает значение погрешности σ. Из этого значения он определяет пороги S1 и S2. Например, в данном случае S1=3σ и S2=6σ.
Как было указано выше, модуль 16 сравнения сравнивает значение ε с определенными таким образом порогами (этапы Е40).
В варианте он сравнивает измерение m' контролируемого параметра р с p_est+/-3σ и с p_est+/-6σ.
Если при этом сравнении он определяет, что ошибка ε превышает порог S1 (ответ «да» на этапе теста Е50 и переход порога S1), модуль 17 уведомления устройства 11 контроля передает уведомление о переходе порога S1 (в данном случае превышении, поскольку ошибка определена таким образом, что является положительной) в блок 18 управления тревожными сигналами и циклом запуска (этап Е60).
Аналогично, если модуль 16 определяет, что ошибка ε превышает порог S2 (ответ «да» на этапе теста Е50 и переход порога S2), модуль 17 уведомления устройства 11 контроля передает уведомление о переходе порога S2 в блок 18 управления тревожными сигналами и циклом запуска (этап Е60).
В описанном варианте осуществления блок 18 управления тревожными сигналами и циклом запуска применяет мажоритарную логику для определения соответствующего действия, которое, в случае необходимости, необходимо предпринять на ракетном двигателе 1 в ответ на полученные уведомления о переходе порогов. Можно применить модульный и последовательный ответ в зависимости от зафиксированного перехода (планирование технического обслуживания, остановка двигателя, адаптация заданного значения yC и т.д.).
Если не зафиксировано никакого перехода (или в данном случае превышения) порога, контроль продолжается описанными выше этапами Е10-Е60 для новой рабочей точки ракетного двигателя 1. Это же происходит после уведомления блока 18 управления.
В описанном варианте осуществления пороги, рассматриваемые устройством контроля, установлены только в зависимости от погрешности σ (то есть равны кратным этой погрешности), которая сама зависит от рассматриваемой рабочей точки PF ракетного двигателя 1.
Во втором варианте осуществления изобретения, чтобы обеспечить более надежный контроль ракетного двигателя 1, устройство 11 контроля определяет пороги, используемые во время этапа сравнения, на основании погрешности σ и дополнительно учитывает динамику изменения рабочей точки двигателя и, в частности, заданные (необработанные или фильтрованные) значения параметров регулирования.
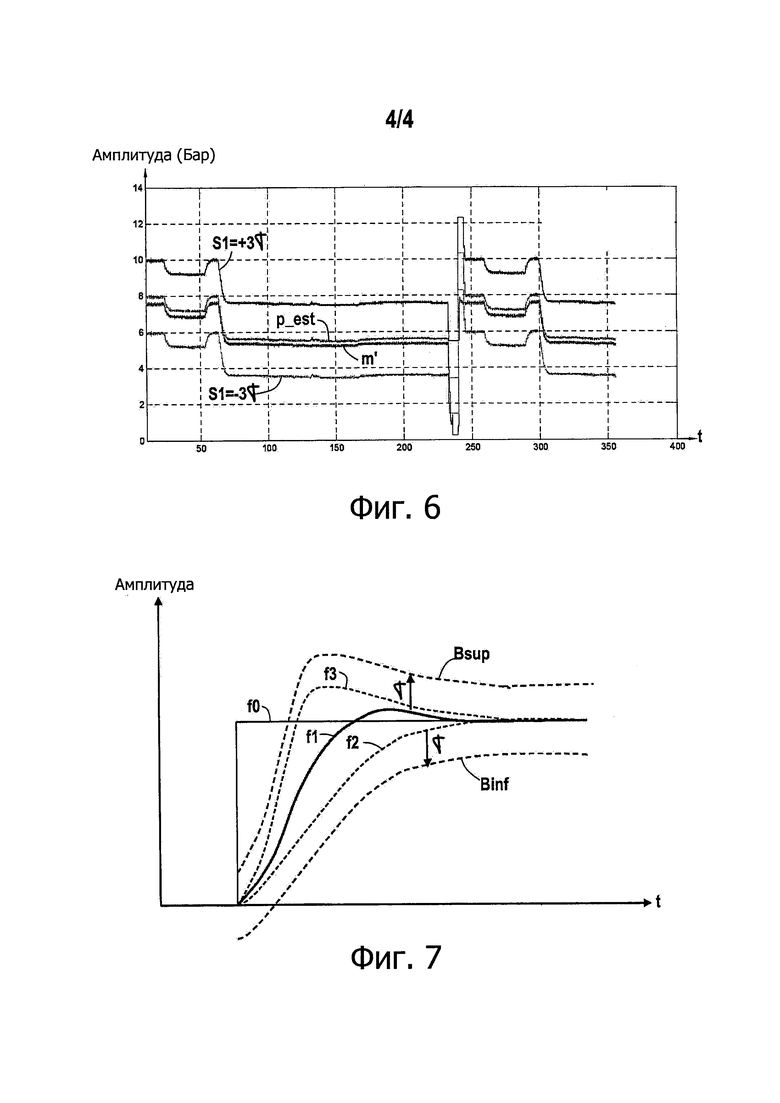
Действительно, авторы изобретения установили, что, когда резко меняются заданные значения параметров регулирования, определяемые системой 2 регулирования, ошибка ε приближается очень близко к порогам, определенным на основании погрешности σ, как показано на фиг. 6 для давления PSPO на выходе кислородного турбонасоса с порогом S1=3σ. Риск, связанный с этим поведением в переходном режиме, состоит в том, что устройство 11 контроля может ошибочно передать тревожный сигнал (перехода порога) в блок 18 управления тревожными сигналами и циклом запуска.
Чтобы учитывать это явление, во время этапа сравнения устройство 11 контроля не только использует пороги, определенные на основании погрешности σ и рабочей точки PF двигателя, но также учитывает динамику изменения рабочей точки двигателя и, в частности, заданных значений параметра или параметров регулирования. Этот учет выражается в определении более широкого контрольного шаблона относительно измерения контролируемого параметра в случае резких (то есть быстрых) переходов рабочей точки двигателя или, наоборот более узкого, во время плавных переходов рабочей точки (то есть она меняется мало или не меняется совсем).
В описанном втором варианте этот шаблон определяют:
- по верхней границе, полученной посредством умножения оценки контролируемого параметра на переходную характеристику заранее определенного фильтра 2-го порядка, моделирующего резкие изменения заданного значения или фильтрованного заданного значения параметра или параметров регулирования, и добавления к результату этой операции ранее определенной погрешности σ (или кратного этой погрешности в зависимости от рассматриваемого порога); и
- по нижней границе, границе, полученной посредством умножения оценки контролируемого параметра на переходную характеристику заранее определенного фильтра 1-го порядка, моделирующего плавные изменения заданного значения или фильтрованного заданного значения параметра или параметров регулирования, и вычитания из результата этой операции ранее определенной погрешности σ (или кратного этой погрешности в зависимости от рассматриваемого порога).
Рассматриваемую единичную ступенчатую функцию для оценки переходных характеристик фильтров 1-го и 2-го порядков определяют по необработанному заданному значению yC параметра или параметров регулирования.
В варианте выполнения устройство 11 контроля рассматривает единичную ступенчатую функцию, определенную по фильтрованному заданному значению yCf параметра или параметров регулирования.
Выбор отсечных частот и задержек фильтров 1-го и 2-го порядков осуществляют в режиме офлайн для данных контролируемого параметра и ракетного двигателя, например, экспериментальным путем, посредством вычислений и тестов, на основании знания динамики контролируемого параметра в зависимости от времени и изменений заданных значений параметров регулирования.
В варианте можно предусмотреть фильтры других порядков (в частности, верхних порядков).
Таким образом, в этом втором варианте осуществления изобретения устройство 11 контроля сравнивает:
- с первым, так называемым верхним порогом, определенным на основании погрешности σ (например, S1верхн=+3σ), ошибку между измерением m' контролируемого параметра и его оценкой p_est, взвешенную (то есть умноженную) ответной характеристикой фильтра 2-го порядка, на единичную ступенчатую функцию, представляющую заданное значение yC (или фильтрованное заданное значение yCf); и
- со вторым, так называемым нижним порогом, определенным на основании погрешности σ (например, S1нижн=-3σ), ошибку между измерением m' контролируемого параметра и его оценкой p_est, взвешенную ответной характеристикой заранее определенного фильтра 1-го порядка, на указанную единичную ступенчатую функцию.
На фиг. 7 в качестве иллюстрации показан контрольный шаблон, выработанный в этом втором варианте осуществления изобретения относительно измерения m' контролируемого параметра р.
Динамика измерения контролируемого параметра р в отклике на единичную ступенчатую функцию f0, отражающую необработанное заданное значение, применяемое к параметрам регулирования, представлена в виде кривой f1. В данном случае под динамикой следует понимать изменение амплитуды в зависимости от времени.
Кривая f2 показывает оценку p_est контролируемого параметра, взвешенную выходной характеристикой фильтра 1-го порядка. Аналогично, кривая f3 показывает оценку p_est контролируемого параметра, взвешенную выходной характеристикой фильтра 2-го порядка.
Нижние Binf и верхние Bsup границы получают, соответственно вычитая или добавляя погрешность σ к кривым f2 и В. Эти границы Binf и Bsup определяют шаблон контроля измерения m' контролируемого параметра р, при этом в соответствии с изобретением переход одной из этих границ контролируемым параметром приводит к передаче уведомления устройством 11 контроля в блок 18 управления тревожными сигналами и циклом запуска.
Следует отметить, что эти границы Binf и Bsup могут меняться в зависимости от времени, так как они меняются в зависимости от заданных значений параметров регулирования, то есть от рабочей точки двигателя.
Как было указано выше в описанных вариантах, изобретение применяют для ракетного двигателя. Однако изобретение можно применять и к другим регулируемым системам, например, таким как авиационный двигатель.
Изобретение относится к общей области аэронавтики, в частности оно относится к контролю ракетного двигателя. Способ содержит: этап (Е10) получения измерения контролируемого параметра, измеряемого датчиком и соответствующего рабочей точке двигателя, причем эту рабочую точку определяют по меньшей мере по одному параметру регулирования двигателя; этап (Е20) оценки значения контролируемого параметра для этой рабочей точки на основании регулируемого значения или фильтрованного заданного значения указанного по меньшей мере одного параметра регулирования двигателя, определяющего рабочую точку; этап (Е40) сравнения ошибки между измерением контролируемого параметра и его оценкой относительно по меньшей мере одного порога, определенного на основании погрешности на указанной ошибке, оцененной для рабочей точки; и этап (Е60) передачи уведомления в случае перехода указанного по меньшей мере одного порога. Также представлены машиночитаемый носитель информации, на котором записана компьютерная программа, содержащая команды для осуществления этапов способа контроля, устройство контроля параметра ракетного двигателя, а также ракетный двигатель, содержащий такое устройство. Изобретение обеспечивает контроль ракетного двигателя, который позволяет обнаружить аномалии, влияющие на ракетный двигатель, как в реальном времени, так и в отложенное время. 4 н. и 8 з.п. ф-лы, 7 ил.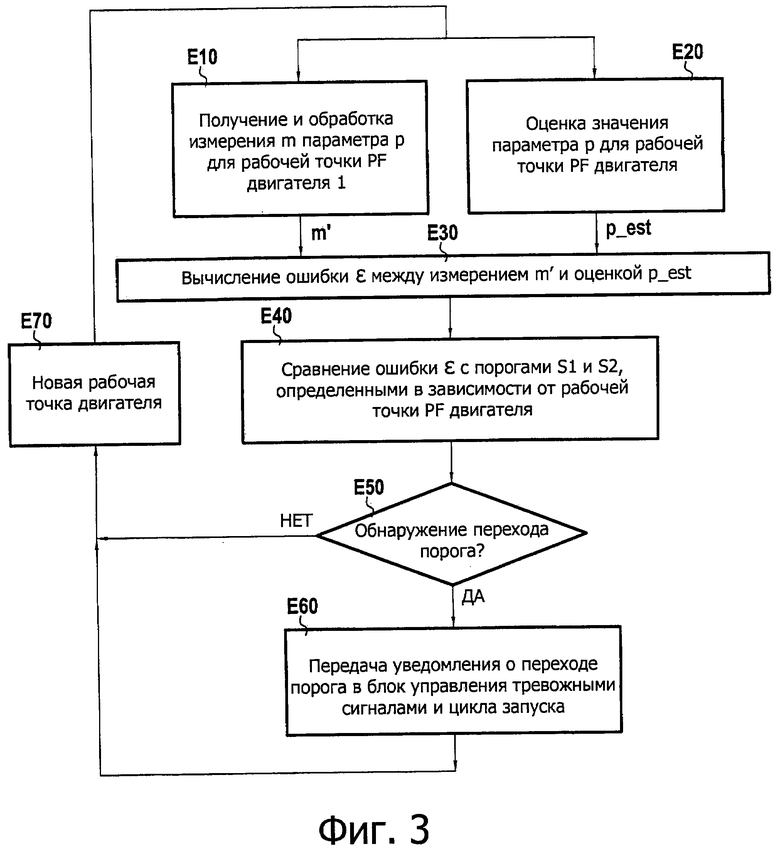
1. Способ контроля параметра ракетного двигателя (1), содержащий:
- этап (Е10), на котором получают измерение (m') контролируемого параметра, выполняемое датчиком (13) и соответствующее рабочей точке двигателя, причем рабочую точку определяют по меньшей мере по одному параметру регулирования двигателя;
- этап (Е20), на котором оценивают значение контролируемого параметра для этой рабочей точки на основании регулируемого значения (yR) или фильтрованного заданного значения (yCf) указанного по меньшей мере одного параметра регулирования, определяющего рабочую точку;
- этап (Е40), на котором сравнивают ошибку между измерением контролируемого параметра и его оценкой относительно по меньшей мере одного порога (S1, S2), определенного на основании погрешности на указанной ошибке, оцененной для рабочей точки; и
- этап (Е60), на котором передают уведомление в случае перехода указанного по меньшей мере одного порога.
2. Способ по п. 1, в котором этап (Е20) оценки значения контролируемого параметра выполняют при помощи искусственной нейронной сети (RNA), входом которой является регулируемое значение или фильтрованное заданное значение указанного по меньшей мере одного параметра регулирования двигателя.
3. Способ по п. 1, в котором во время этапа сравнения рабочую точку, используемую для определения указанной погрешности на ошибке, определяют на основании:
- регулируемого значения (yR) указанного по меньшей мере одного параметра регулирования; или
- фильтрованного заданного значения (yCf) указанного по меньшей мере одного параметра регулирования; или
- заданного значения (yC) указанного по меньшей мере одного параметра регулирования.
4. Способ по п. 1, в котором рабочую точку определяют по меньшей мере по одному из следующих параметров регулирования:
- давление камеры сгорания двигателя;
- соотношение компонентов смеси на входе насоса двигателя.
5. Способ по п. 1, в котором на этапе сравнения также учитывают динамику изменения рабочей точки двигателя.
6. Способ по п. 5, в котором на этапе сравнения сравнивают
- с первым порогом, называемым верхним порогом, ошибку между измерением контролируемого параметра и его оценкой, взвешенную ответной характеристикой заранее определенного фильтра 2-го порядка на единичную ступенчатую функцию, представляющую заданное значение или фильтрованное заданное значение указанного по меньшей мере одного контролируемого параметра; и
- со вторым порогом, называемым нижним порогом, ошибку между измерением контролируемого параметра и его оценкой, взвешенную ответной характеристикой заранее определенного фильтра 1-го порядка на указанную единичную ступенчатую функцию.
7. Способ по п. 1, в котором контролируемым параметром является параметр, выбранный из группы, в которую входят:
- давление двигателя;
- температура двигателя;
- скорость вращения элемента двигателя;
- расход текучей среды, циркулирующей в двигателе;
- вибрационная характеристика двигателя.
8. Способ по п. 1, в котором указанная погрешность на ошибке учитывает по меньшей мере одну погрешность, выбранную из погрешности оценки контролируемого параметра и погрешности измерения контролируемого параметра.
9. Способ по п. 2, в котором указанная погрешность на ошибке учитывает погрешность оценки контролируемого параметра, определяемую в зависимости от:
- погрешности на входе искусственной нейронной сети;
- погрешности на нейронной сети;
- погрешности на базе данных обучения, используемой для построения нейронной сети.
10. Машиночитаемый носитель информации, на котором записана компьютерная программа, содержащая команды для осуществления этапов способа контроля по п. 1.
11. Устройство (11) контроля параметра ракетного двигателя, содержащее
модуль (14) для получения измерения контролируемого параметра, измеряемого датчиком (13) и соответствующего рабочей точке двигателя, причем рабочая точка определяется по меньшей мере по одному параметру регулирования двигателя;
модуль (15) для оценки значения контролируемого параметра для указанной рабочей точки на основании регулируемого значения (yR) или фильтрованного заданного значения (yCf) указанного по меньшей мере одного параметра регулирования двигателя, определяющего указанную рабочую точку;
модуль (16) для сравнения ошибки между измерением контролируемого параметра и его оценкой относительно по меньшей мере одного порога, определенного на основании погрешности на указанной ошибке, оцененной для рабочей точки; и
модуль (17) для передачи уведомления в случае перехода указанного по меньшей мере одного порога.
12. Ракетный двигатель (1), содержащий устройство по п. 11.
| US 2005222747 A1, 06.10.2005 | |||
| ОСАЖДЕННЫЙ КАРБОНАТ КАЛЬЦИЯ | 2004 |
|
RU2336919C2 |
| US 5857321 A, 12.01.1999. | |||

