ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к полевым приборам в системах управления технологическими процессами, а более конкретно, к электропневматическим преобразователям для управления клапаном в системе управления процессом.
УРОВЕНЬ ТЕХНИКИ
[0002] Промышленные перерабатывающие заводы используют управляющие клапаны в широком спектре применений, таких как управляющие потоком процессы на нефтеперерабатывающих заводах для поддержания уровня флюидов в резервуарах. Управляющие клапаны, которые, как правило, автоматизированы, используются для управления потоком флюида, функционируют как переменное отверстие или проход. Контролируя внутренний компонент клапана, а именно конический вентиль, количество продукта, проходящее через корпус клапана может быть точно отрегулировано. Управляющий клапан, как правило, автоматизирован с применением исполнительного привода, который контролируется дистанционным управляемым полевым прибором. Полевой прибор взаимодействует с компьютером управления процессом, выдающим команды для изменения потока флюида внутри клапана для достижения желаемой стратегии управления с помощью пневматических клапанов. Электропневматические преобразователи, такие как преобразователи ток-давление, широко используются в полевых приборах, обеспечивая преобразование электрического сигнала в объемный расход флюида или выходное давление для контроля исполнительного привода и, следовательно, управления клапаном.
[0003] Современные электропневматические преобразователи либо обеспечивают непрерывное, пропорциональное преобразование ток-давление или обеспечивают прерывистый или импульсный режим преобразования ток-давление. Существующие электропневматические преобразователи непрерывного действия потребляют или расходуют воздух постоянно во время работы. Высокий расход воздуха является нежелательным в некоторых применениях, когда при подаче флюида к полевому прибору и электропневматическому преобразователю используется природный газ. Например, затраты, связанные с обеспечением дополнительной мощности в системе подачи флюида могут быть существенными. Кроме того, постоянная утечка флюида является дорогой и расточительной для окружающей среды. В альтернативном варианте, существующие электропневматические преобразователи импульсного режима обычно основаны на технологиях с применением пьезоэлектрических устройств либо мульти-соленоидных электромагнитов. Пьезоэлектрические конструкции, известных производителей таких, как Hoerbiger Gmbh of Altenstadt, Germany, могут быть чрезвычайно мощными и относительно дорогими при внедрении. Дополнительно, пьезоэлектрические конструкции имеют низкий температурный диапазон использования, обусловленный тем, что пьезоэлектрический эффект начинает уменьшаться ниже температур примерно -20°С. Кроме того, мульти-соленоидные конструкции сложны и могут быть дорогими в изготовлении из-за необходимости повторного изготовления электромагнитной схемы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Первый аспект настоящего изобретения предусматривает сборку нижнего кожуха и сборку верхнего кожуха. Сборка нижнего кожуха, содержит нижний кожух, выполненный с возможностью присоединения входного патрубка. Входной патрубок, находящийся в гидравлическом сообщении с входным отверстием, а также находящийся в периодическом гидравлическом сообщении с выходным отверстием нижнего кожуха через внутренний флюидный перепускной канал. При этом нижний кожух дополнительно содержит выхлопной патрубок, находящийся в гидравлическом сообщении с выхлопным отверстием, а также находящийся в периодическом гидравлическом сообщении с выходным отверстием нижнего кожуха через внутренний флюидный перепускной канал. Сборка верхнего кожуха, содержащая верхний кожух, выполнена с возможностью присоединения катушки и якоря, причем верхний кожух, катушка и якорь образуют запирающую электромагнитную схему, которая обеспечивает периодический контакт якоря с входным патрубком и выхлопным патрубком сборки нижнего кожуха.
[0005] Второй аспект настоящего изобретения предусматривает пневматическую и электромагнитную схемы. Пневматическая схема, содержит нижний кожух, содержащий входное отверстие, выхлопное отверстие и выходное отверстие, находящиеся в гидравлическом сообщении с внутренним флюидным перепускным каналом и с камерой высокого давления; а также, электромагнитную схему, содержащую верхний кожух, выполненный с возможностью присоединения катушки и якоря, причем якорь подвижен в ответ на электрический входной сигнал, при этом электромагнитная схема определяет момент силы упругости и момент магнитной силы.. Момент силы упругости и момент магнитной силы, взаимодействуя, обеспечивают запирание якоря поочерёдно непосредственно примыкающим к и не примыкающим к верхнему кожуху.
[0006] В соответствии с третьим аспектом раскрытия изобретения электропневматический переключающий клапан содержит пневматическую схему, электромагнитную схему и модуль управления. Пневматическая схема соединена с источником сжатого флюида, а электромагнитная схема, соединена с пневматической схемой. Модуль управления соединен с электромагнитной схемой и предоставляет первый управляющий сигнал, вызывающий первое состояние пневматической схемы, второй управляющий сигнал, вызывающий второе состояние, третий управляющий сигнал, вызывающий третье состояние и четвёртый управляющий сигнал, вызывающий четвертое состояние пневматической схемы.
[0007] Дополнительно в соответствии с любым одним или несколькими из указанных выше первым, вторым, или третьим аспектами, устройство или устройства, как описано выше, может или могут дополнительно включать любой один или более из следующих предпочтительных форм реализации.
[0008] Катушка выполнена с возможностью приема входного электрического сигнала для активации и деактивации электромагнитной схемы, таким образом запирая выходное отверстие при состоянии высокой производительности и состоянии низкой производительности.
[0009] Преобразователь может быть выполнен с возможностью периодически модулировать поток флюида через входной патрубок и выхлопной патрубок, для устранения постоянного потока через датчик.
[0010] Нижний кожух может быть дополнительно выполнен с возможностью приема регулировочного винта смещающей пружины и верхний кожух дополнительно выполнен с возможностью приема смещающей пружины.
[0011] Смещающая пружина и винт регулировки смещающей пружины взаимодействуют для обеспечения усилия смещающей пружины для смещения якоря электромагнитной схемы.
[0012] Электропневматический преобразователь может быть выполнен с возможностью соединения с источником пневмопитания.
[0013] Преобразователь может быть выполнен с возможностью работать при давлении источника пневмопитания в диапазоне примерно от 138 кПа (20 фунтов на квадратный дюйм) до 1034 кПа (150 фунтов на квадратный дюйм)
[0014] Заданный коэффициент температурного расширения сборки верхнего кожуха и сборки нижнего кожуха содействуют обеспечению диапазона рабочих температур от +85 градусов по Цельсию до -60 градусов по Цельсию.
[0015] Внутренний флюидный перепускной канал, может дополнительно содержать камеру давления, канал входного отверстия, канал выхлопного отверстия и выпускной канал.
[0016] Входной патрубок и выхлопной патрубок могут иметь заданную отрогональность по отношению к цилиндру, сформированному посредством первого участка входного патрубка и выхлопным патрубком вдоль продольной оси входного патрубка и выхлопного патрубка.
[0017] Якорь может содержать множество шарниров, обеспечивающих момент силы упругости, противостоящий моменту магнитной силы, обеспечивая запирание якоря поочерёдно непосредственно примыкающим к и не примыкающим к верхнему кожуху.
[0018] Мощность электрического сигнала, по существу может быть равна нулю, когда якорь запирается, непосредственно примыкая к и не примыкая к верхнему кожуху.
[0019] Входной патрубок может находиться в гидравлическом сообщении с входным отверстием и периодически находиться в гидравлическом сообщении с выходным отверстием через внутренний флюидный перепускной канал, а также выхлопной патрубок находится в гидравлическом сообщении с выхлопным отверстием и периодически находится в гидравлическом сообщении с выпускным отверстием через внутренний флюидный перепускной канал.
[0020] Запирающий электропневматический преобразователь в альтернативном варианте может быть выполнен для прямого или реверсивного действий.
[0021] Первый и третий управляющие сигналы, по сути, могут быть эквивалентны.
[0022] Второй управляющий сигнал может переводить электропневматический переключающий клапан из первого состояния в третье состояние.
[0023] Четвертый управляющий сигнал может переводить электропневматический переключающий клапан из третьего состояния в первое состояние.
[0024] Первое состояние пневматической схемы может соответствовать первому установленному состоянию пневматической схемы, второе состояние пневматической схемы может соответствовать первому неустановленному состоянию пневматической схемы, третье состояние пневматической схемы может соответствовать второму установленному состоянию и четвертое состояние может соответствовать второму неустановленному состоянию.
[0025] Первое установленное состояние пневматической схемы может быть при давлении, по сути равном давлению флюида в выхлопном отверстии, а второе установленное состояния пневматической схемы может быть при давлении, по существу, равном давлению флюида на входном отверстии.
[0026] Первое неустановленное состояние пневматической схемы может характеризоваться положительным градиентом давления в пневматической схеме, а второе неустановленное состояния пневматической схемы может характеризоваться отрицательным градиентом давления в пневматической схеме.
[0027] Первое неустановленное состояние пневматической схемы может характеризоваться отрицательным градиентом давления в пневматической схеме, а второе неустановленное состояние пневматической схемы может характеризоваться положительным градиентом давления пневматической схемы.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0028] Фиг. 1 представляет собой вид в перспективе примера преобразователя, сконструированного в соответствии с принципами раскрытого в данном документе изобретения.
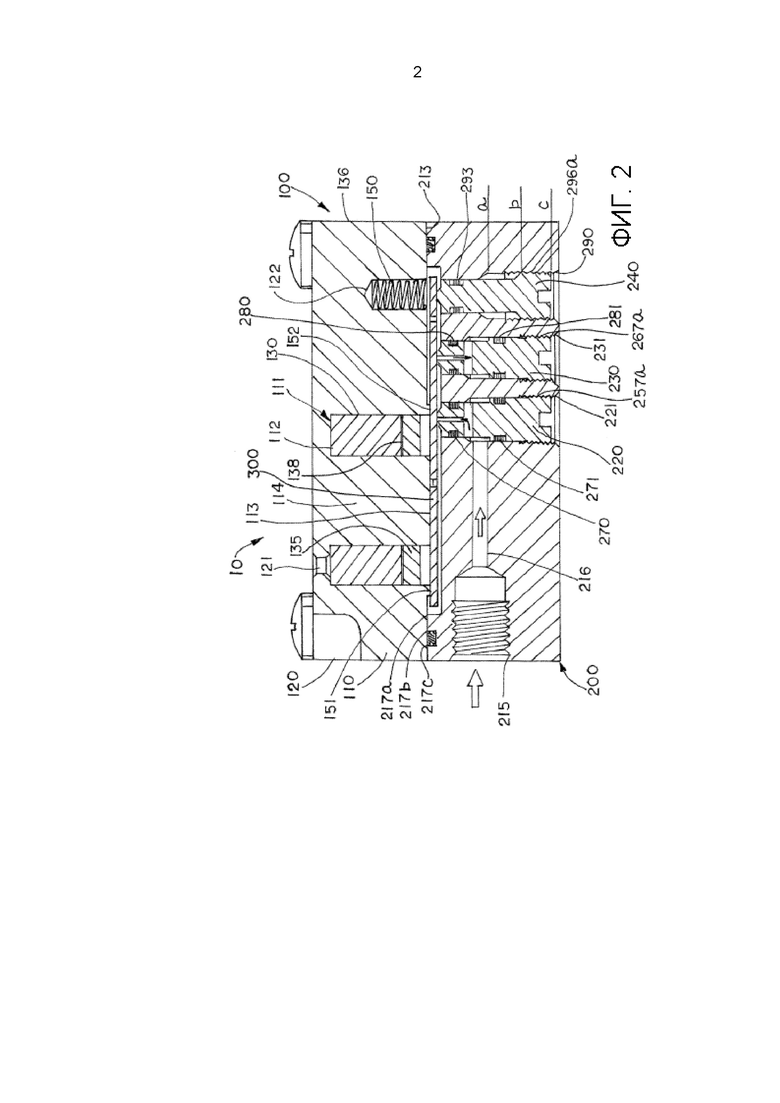
[0029] На Фиг. 2 проиллюстрирован вид в поперечном сечении примера преобразователя, сконструированного в соответствии с принципами настоящего изобретения;
[0030] Фиг. 3 представляет собой плоскостной вид изображения верхнего блока примера преобразователя, сконструированного в соответствии с принципами раскрытого в данном документе изобретения.
[0031] На Фиг. 4 проиллюстрирован плоскостной вид в поперечном сечении нижнего блока примера преобразователя, сконструированного в соответствии с принципами настоящего изобретения;
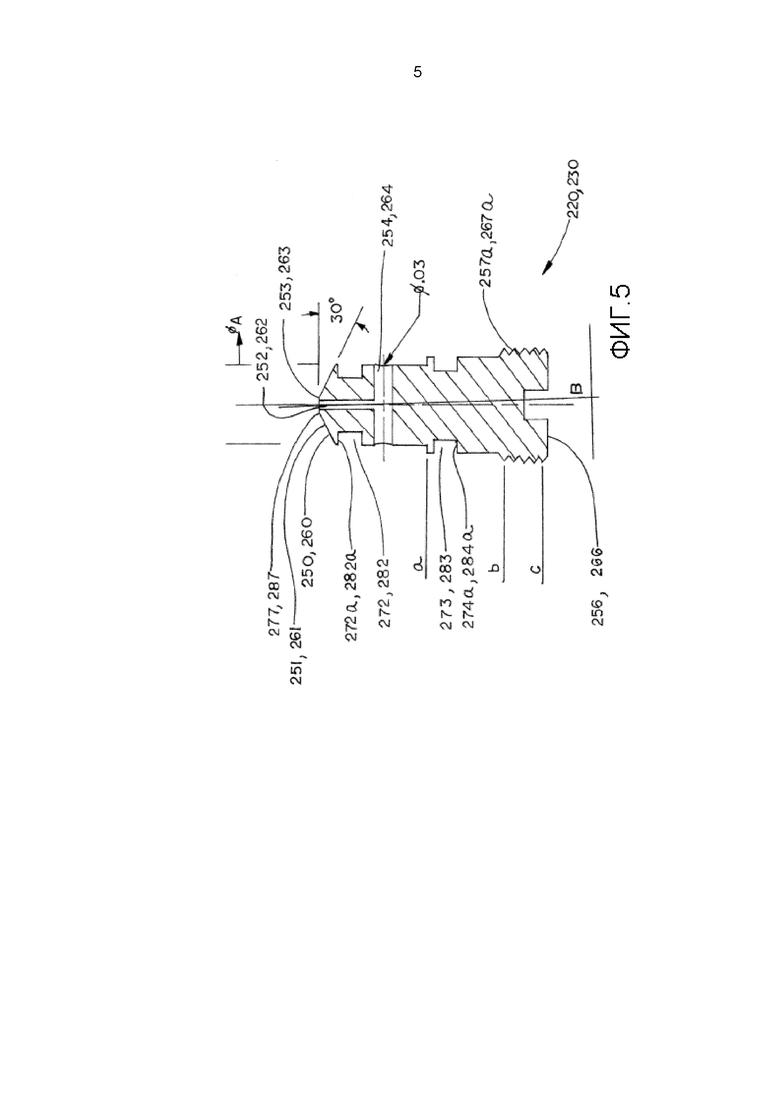
[0032] На Фиг. 5 проиллюстрирован вид в поперечном сечении входного патрубка и выхлопного патрубка примера преобразователя, сконструированного в соответствии с принципами настоящего изобретения;
[0033] На Фиг. 6 проиллюстрирован вид в поперечном сечении регулировочного винта смещающей пружины примера преобразователя, сконструированного в соответствии с принципами настоящего изобретения;
[0034] На Фиг. 7 проиллюстрирован плоскостной вид якоря примера преобразователя, построенного в соответствии с принципами раскрытого в данном документе изобретения.
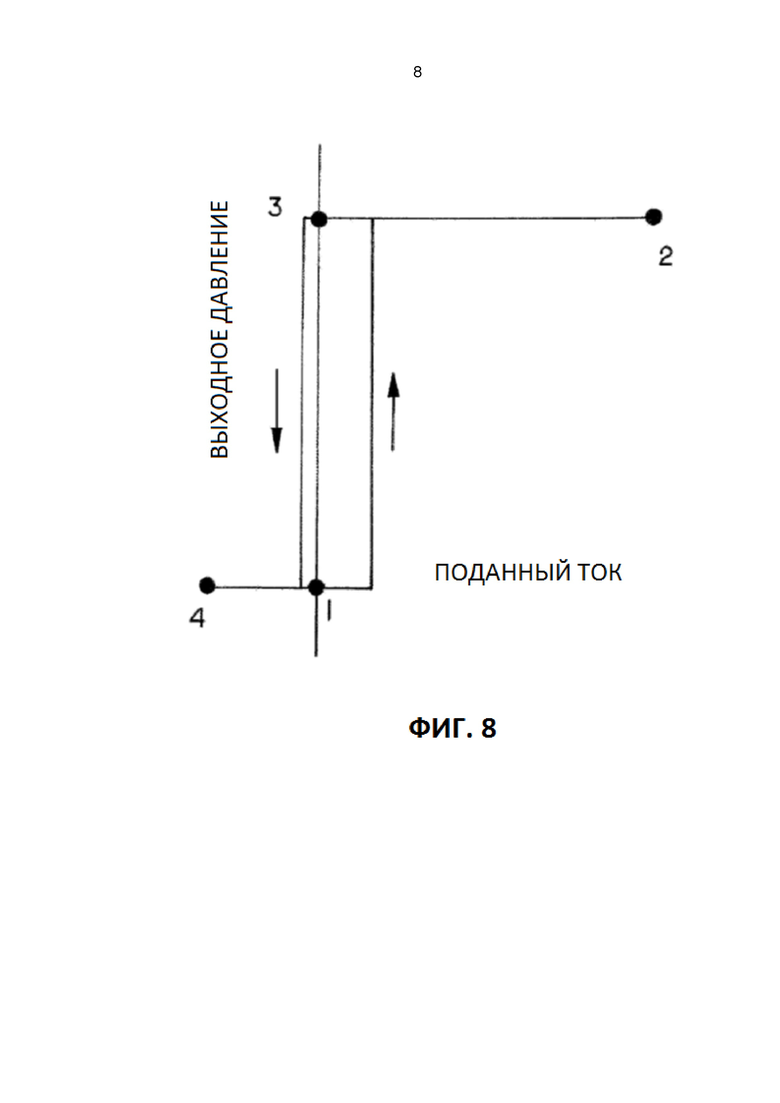
[0035] На Фиг. 8 представлена диаграмма состояний эксплуатационных характеристик примера преобразователя, построенного в соответствии с принципами раскрытого в данном документе изобретения.
[0036] На Фиг. 9 представлена иллюстрация профиля приведения в действие примера преобразователя, построенного в соответствии с принципами раскрытого в данном документе изобретения.
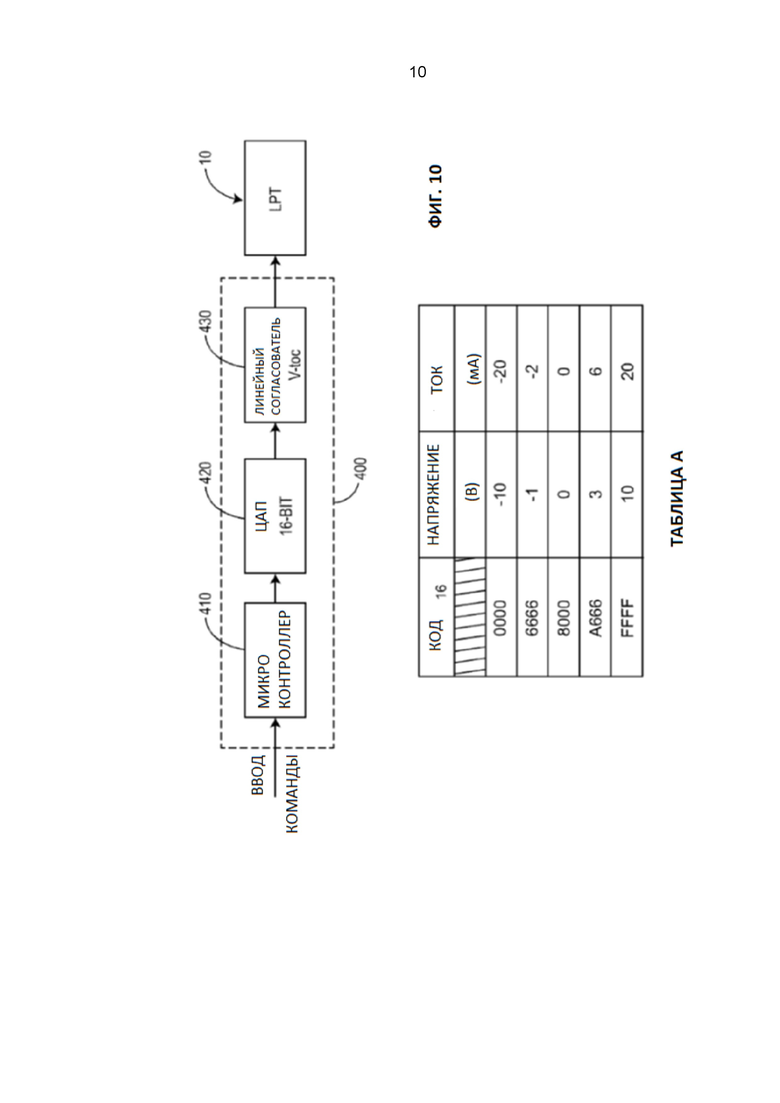
[0037] На Фиг. 10 приведена схема примера модуля управления, управляющего примером преобразователя, построенным в соответствии с принципами раскрытого в данном документе изобретения.
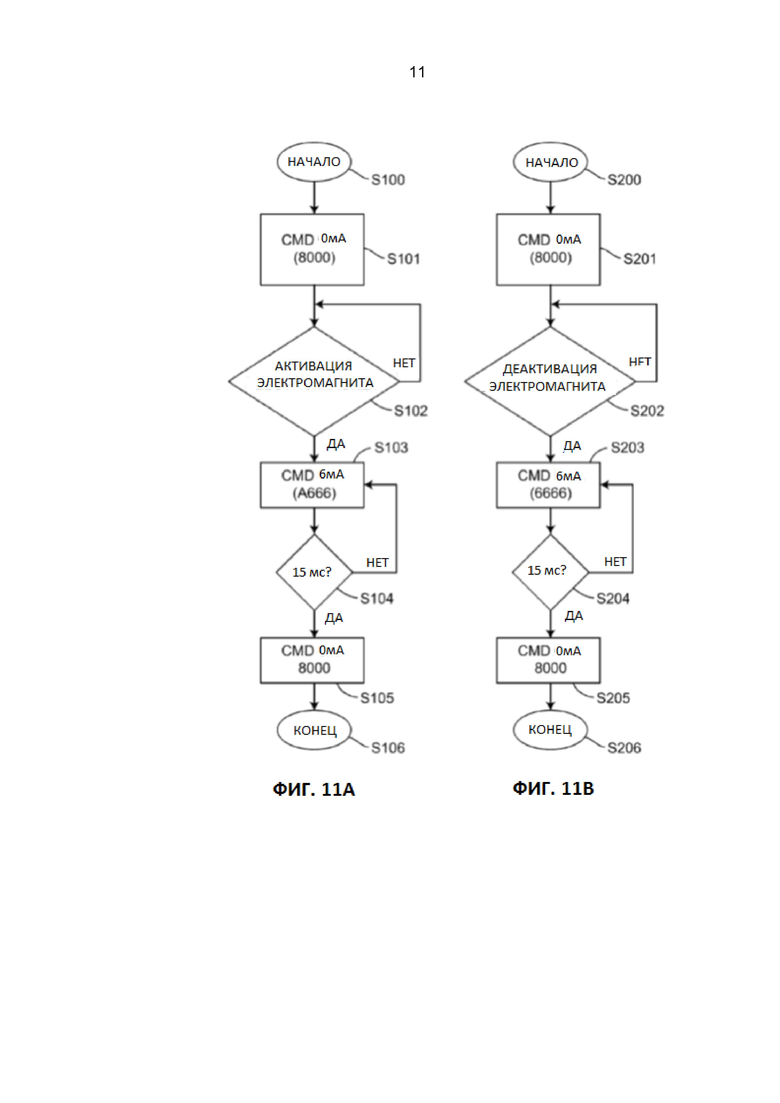
[0038] На Фиг. 11А и 11В приведены примеры блок-схемы контрольной логики модуля управления для примера преобразователя, построенного в соответствии с принципами раскрытого в данном документе изобретения.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0039] В целях содействия пониманию принципов настоящего изобретения ссылки будут сделаны на варианты реализации изобретения, проиллюстрированные на графических материалах, а для их описания будут использоваться конкретные формулировки. Тем не менее, следует понимать, что любые изменения и дальнейшие модификации описанных устройств, инструментов, способов и любые дополнительные направления практического применения настоящего изобретения в полной мере рассматриваются как обычно встречающиеся специалисту в данной области, к которой относится изобретение.
[0040] Электропневматические полевые приборы предоставляют преобразование электрического сигнала в объёмный поток или выходное давление с возможностью присоединения независимого электрического управляющего сигнала к зависимому сигналу пневматического давления посредством преобразователя давления. Соответственно, предлагается предварительная пневматическая ступень, а именно преобразователь, а более конкретно, Запирающий Пневматический Преобразователь (ЗПП), для соединения с источником давления флюида, содержащего устройство для начальной установки величины пневматического выходного сигнала посредством входного электрического сигнала. Пневматический выходной сигнал (т.е. давление флюида) из примера ЗПП может быть предоставлен пневматике основной ступени, а именно пневматическому усилителю (например, реле или золотниковому клапану) перед подачей в рабочую камеру исполнительного привода. В соответствии с примером ЗПП, устройство преобразователя разработано для генерирования запирающего прерывающегося выходного пневматического сигнала за счет одного входного электрического сигнала; при этом функционируя в качестве электропневматического переключающего клапана..
[0041] Ссылаясь на Фиг. 1, 2, 3 и 4, запирающий пневматический преобразователь (ЗПП) 10 содержит верхний блок устройства 100 и нижний блок устройства 200. Верхний блок устройства содержит верхний блок или кожух 110, катушку 130, смещающую пружину 150 и якорь 300, в том числе застежку якоря 310, для описания электромагнитной схемы на примере ЗПП 10. Верхний кожух 110 предпочтительно представляет собой прямоугольный параллелепипед, состоящий из кольцевой выемки катушки 111, образованной из первой цилиндрической полости 112, имеющей концентрические цилиндрический сердечник 114, выполненный с возможностью приема катушки 130. Первый дистальный конец 120 верхнего блока 110 содержит электрический канал через 121 для приема пары электрических проводов (не показаны) катушки 130. Верхний кожух 110 дополнительно содержит вторую цилиндрическую полость 122, образующую пружинную выемку для приема смещающей пружины 150. Поднятый якорный фиксатор 151 обеспечивает монтажную поверхность для якоря 300, включая кольцевой ограничитель хода 152, огибающий кольцевую выемку катушки 111. Уплотнитель катушки 135 может быть размещен в непосредственной близости от первого конца 138 катушки 130, образуя гидроизоляционное уплотнение, предотвращая контакт питающего флюида с катушкой 130. Множество крепежных отверстий 139a-d предусмотрено в углах верхнего блока 110 для приема крепежных элементов 140а-d, фиксируя верхний блок устройства 100 с нижним блоком устройства 200.
[0042] В качестве примера, предпочтительная длина, ширина и высота верхнего блока 110 составляет 3,6576 см (1,440 дюйма), 2,6924 см (1,060 дюйм), и 0,9779 см (0,385 дюйма), соответственно, верхний блок 110 предпочтительно изготавливают из углеродистой стали марки UNS G10100 с антикоррозионным покрытием используя никелевое электролизное платирование предложенное Atotech USA of Rock Hill, South Carolina, формирующее толщину слоя в диапазоне от 4 мкм до 6 мкм, и предпочтительно 5 мкм. Дополнительно, верхний блок 110 может быть изготовлен предпочтительно с использованием известных способов обработки из прутковой заготовки или изготовлен методом Metal Injection Molding. Кроме того, альтернативный вариант пассивации может включать покрытие Parylene Coating Service of Katy, Техас или покрытия Ballinit® компании Oerlikon Balzers Coating of Schaumburg, Иллинойс. Наружный диаметр кольцевой выемки катушки 111 предпочтительно равен 1,41 см (0,555 дюйма), а внутренний диаметр образованный цилиндрическим сердечником 114 предпочтительно равен 0,739 см (0,291 дюйма) и расположен на 2,319 см (0,913 дюйма) от второго дистального конца 136 вдоль центральной оси A, с отверстием электрического подвода 121, примерно расположенным около кольцевой выемки катушки 111 и предпочтительно имеющем диаметр 0,1346 см (0,053 дюйма) вдоль оси А и расположенным на 0,7874 см (0,310 дюймов) от первого дистального конца 120. Выемка смещающей пружины 124 имеет предпочтительный диаметр 0,2387 см (0,094 дюйма) и 0,457 см (0,180 дюйма) и размещается на 0,62484 см (0,246 дюймов) в глубину от второго дистального конца 136. Как проиллюстрировано на Фиг. 3 кольцевой ограничитель хода 152 предпочтительно представляет собой плоский кольцевой выступ, имеющий наружный размер 1,5875 см (0,625 дюйма) и внутренний размер 1,4097 см (0,555 дюйма), дополнительно содержащий два рельефных выступа крепления якоря 151 и крепежи 0-80 для прикрепления якоря к верхнему блоку 110. Размеры, указанные в данном документе, для примера ЗПП 10 являются всего лишь примерными и другие устройства, изготовленные в соответствии с принципами, описанными в данном документе, могут быть изготовлены с различными размерами и имеющими различные соотношения размеров.
[0043] Как описано более подробно ниже, движущей силой, заставляющей якорь двигаться во время работы, на примере ЗПП 10, является притяжение и отталкивание, выработанные с помощью электромагнита, образованного в катушке 130 верхнего блока 110. Катушка 130 на примере ЗПП 10 предпочтительно изготавливается с использованием горячего воздуха и безбобинной укладки, и предпочтительно 0,607 см (0,239 дюймов) в длину, и имеет наружный диаметр 1,5875 см (0,625 дюйма) и внутренний диаметр 1,4097 см (0,555 дюйма). Магнитный провод, обычно используемый для изготовления катушки, имеет площадь сечения предпочтительно 0,0032 мм. кв. (42 AWG) и содержит 3100 витков, обеспечивая сопротивление обмотки предпочтительно в 600 Ом.
[0044] Далее ссылаясь на Фиг. 1 и 2, нижний блок устройства 200, содержит нижний блок или кожух 210; входной патрубок 220; выхлопной патрубок 230; и регулировочный винта смещающей пружины 240. Нижний блок 210 предпочтительно представляет собой прямоугольный параллелепипед, состоящий из выемки, формой, подобной «гоночной трассе», или овальной камере 211, ограниченной овальной уплотнительной выемкой 212, образованной на практически плоской поверхности внутренней поверхности 213 нижнего блока 210. Овальное уплотнение 214, такое как уплотнительное кольцо, может помещаться в овальную уплотнительную выемку 212, предотвращая потерю питающего флюида между верхним блоком 100 и нижним блоком 200. Нижний блок 200 дополнительно образует внутренние коллекторы флюидов или флюидные перепускные каналы на примере ЗПП 10, таким образом, описывая пневматическую схему на примере ЗПП 10.
[0045] Ссылаясь на Фиг. 2 и 4, внутренние коллекторы внутри нижнего блока 210, выполнены с возможностью приема линии подачи давления (не показано), входного патрубка 220, выхлопного патрубка 230 и регулировочного винта смещающей пружины 240. Более конкретно, входное отверстие 215 предоставляется для получения посредством резьбового соединения коннектора для подключения примера ЗПП 10 к источнику давления (не показан), такому как технологическая установка для подачи питающего воздуха для инструмента с примерным диапазоном рабочих давлений от 138 кПа (20 фунтов на квадратный дюйм) до 1034 кПа (150 фунтов на квадратный дюйм), и предпочтительно 138 кПа (20 фунтов на квадратный дюйм). Входное отверстие 215 соединяется с каналом входного отверстия 216, находящимся в гидравлической связи с входным патрубком 220. Камера входного патрубка 221 выполнена с возможностью приема входного патрубка 220 через резьбовое соединение. Нижний блок 210 дополнительно содержит выхлопное отверстие 235 (Фиг. 1), поперечно расположенное от входного отверстия 215 и выполненное с возможностью приема потокового соединителя (не показан), который может подключать пример ЗПП 10 к трубопроводу для выхлопа (не показан). Выхлопное отверстие 235 соединяется с каналом выхлопного отверстия 236, находящимся в гидравлическом сообщении с выхлопным патрубком 230. Камера выхлопного патрубка 231 выполнена с возможностью приема выхлопного патрубка 230 через резьбовое соединение. Нижний блок 210 дополнительно содержит выпускное отверстие 245 (Фиг. 1), поперечно расположенное от входного отверстия 215, находящегося в гидравлической связи с входным отверстием 215 и выхлопным отверстием 235, через овальную камеру 211 через выпускной канал 246 и выходное отверстие 247 камеры.
[0046] Предпочтительная длина и ширина нижнего блока составляет 3,6576 см (1,440 дюйма), 2,6924 см (1,060 дюйма), соответственно, высота либо толщина составляет 1,1176 см (0,440 дюйма); нижний блок 210 предпочтительно изготавливают из углеродистой стали марки UNS G10100 с антикоррозионным покрытием, используя никелевое электролизное платирование, предлагаемое Atotech USA of Rock Hill, Южная Калифорния, формирующее толщину слоя в диапазоне от 4 мкм до 6 мкм, и предпочтительно 5 мкм. Дополнительно, нижний блок 210 может быть изготовлен предпочтительно с использованием известных способов обработки из прутковой заготовки или изготовленные методом Metal Injection Molding. Кроме того, альтернативный вариант пассивации может включать покрытие Parylene Coating Service of Katy, Техас, или покрытия Ballinit® компании Oerlikon Balzers Coating of Schaumburg, Иллинойс. Овальная камера 211 и овальная уплотняющая выемка 212 образованы при изготовлении в виде трех концентрических эллипсов 217а-с на внутренней поверхности 203 с радиусом 0,9525 см (0,375 дюйма), 1,0795 см (0,425 дюйма) и 1,2065 см (0,475 дюйма) на центральной оси, А с овальной камерой 211 и овальной уплотняющей выемкой 212, имеющих глубину предпочтительно 0,1143 см (0,045 дюйма) и 0,071 см (0,028 дюйма), соответственно. Несколько отверстий застежки 141a-d предусмотрены в углах нижнего блока для приема крепежей, фиксируя верхний блока устройства 100 с нижним блоком устройства 200. Камера входного патрубка 221 и камера выхлопного патрубка 231 имеют ступенчатую цилиндрическую конфигурацию, предпочтительный диаметр которых 0,28956 см (0,114 дюйма) для глубины и 0,2413 см (0,095 дюймов) в сечении а; диаметр 0,340 см (0,134 дюйма) для глубины и 0,762 см (0,300 дюймов) в сечении б; диаметр 0,360 см (0,142 дюйма) для глубины и 0,39878 см (0,157 дюймов) в сечении с. Дополнительно, предпочтительный угол фаски в 60 градусов между сечениями а и б и сечениями б и с и 90 градусов угол фаски, на концевиках входного патрубка 221 и выхлопного патрубка 231 в концевой части блока 232 секции с.
[0047] Снова ссылаясь на Фиг. 5, хотя входной патрубок 220 и выхлопной патрубок 230 на примере ЗПП 10 имеют по существу аналогичную конструкцию, как описано ниже, специалисту в данной области техники будет понятно, что такие патрубки могут отличаться в предложенных размерах или конфигурации, не выходящих за пределы сущности и объема примера ЗПП 10. Дополнительно, в данном документе ссылка на патрубок означает либо/или входной патрубок 220 и выхлопной патрубок 230. Первый дистальный конец 250, 260 патрубка 220, 230 заканчивается усеченной конусной поверхностью 251, 261, имеющие инжекционные каналы 252, 262, завершающиеся при вершине отверстий патрубка 253, 263, которые находятся в гидравлической связи с поперечными каналами 254, 264 патрубка 220 и патрубка 230. Верхние и нижние уплотнители патрубка 270, 280 и 271, 281 могут быть размещены в верхней и нижней выемках для уплотнения 272, 282 и 273, 283, фиксируя и направляя подачу флюида из входного канала 216 и канала выхлопного отверстия 236, соответственно, через поперечные каналы 254, 264 и в канал патрубка 252, 262. Второй дистальный конец 256, 266 может содержать резьбовой участок 257а, 267а для зацепления с соответствующими резьбовыми участками 257b, 267b камеры входного патрубка 221 и камеры выхлопного патрубка 231, соответственно. Входной патрубок 220 обычно используется для направления подачи флюида из источника подачи в овальную камеру 211 примера ЗПП 10 и наружу через выходное отверстие 245, а также выхлопной патрубок 230 обычно используется для направления подачи флюида из овальной камеры 211 в выхлопное отверстие 235, как описано более подробно ниже.
[0048] Как проиллюстрировано на Фиг. 2 и 6, нижний блок устройства 200 также содержит регулировочный винт смещающей пружины камеры 290, изменяя поток перемещением регулировочного винта 240. Первый дистальный конец 291 регулировочного винта смещающей пружины 240 заканчивается на конической поверхности 292. Дополнительно, уплотнитель верхнего регулировочного винта 293 может быть размещен в верхней уплотнительной выемке регулировочного винта 294, предотвращая потерю флюида из овальной камеры 211. Второй дистальный конец 295 может содержать резьбовой участок 295a для приема соответствующего резьбового участка 296a регулировочного винта камеры 290.
[0049] Входной патрубок 220 и выхлопной патрубок 230 имеют ступенчатую цилиндрическую конфигурацию, предпочтительно диаметром 0,2794 см (0,110 дюйма) при длине 0,45466 см (0,179 дюйма) в первом сечении а; диаметр 0,330 см (0,130 дюйма) для длины 0,3048 см (0,120 дюйма) во втором сечении, сечение б; диаметр 0,36068 см (0,142 дюйма) для глубины 0,2057 см (0,081 дюйма) в третьей секции сечения с и с с предпочтительным резьбовым участком M4×0,35 длиной в 0,2057 см (0,081 дюймов). Входной патрубок 220 и выхлопной патрубок 230 предпочтительно могут быть изготовлены из углеродистой стали марки UNS G10100 с антикоррозионным покрытием, используя никелевое электролизное платирование предложенное Atotech USA of Rock Hill, Южная Калифорния, формирующее толщину слоя в диапазоне от 4 мкм до 6 мкм, и предпочтительно 5 мкм. Дополнительно, входной патрубок 220 и выхлопной патрубок 230 могут быть изготовлены предпочтительно с использованием известных способов обработки из прутковой заготовки или изготовленные методом Metal Injection Molding. Кроме того, альтернативный вариант пассивации может включать покрытие Parylene Coating Service of Katy, Техас или покрытия Ballinit® компании Oerlikon Balzers Coating of Schaumburg, Иллинойс, имеющее предпочтительную толщину в 5 мкм. Предпочтительный угол фаски в 30 градусов на дистальном конце 250, 260 патрубка 220, 230. Уплотнительное кольцо верхнего хвостовика патрубка 270, 280, предпочтительно имеет 0,099 см (0,039 дюйма) в высоту и внутренний диаметр 0,1905 см (0,075 дюйма), включая верхнюю поверхность уплотнения патрубка 272а, 282а предпочтительно в 0,08128 см (0,032 дюйма) от дистального конца 250, 260 патрубка. Уплотнители нижней выемки патрубка 273, 283, предпочтительно, имеют высоту в 0,099 см (0,039 дюйма) и внутренний диаметр 0,2413 см (0,095 дюйма), учитывая нижнюю уплотнительную поверхность патрубка 274а, 284а предпочтительно в 0,01397 см (0,190 дюйма) от дистального конца 250, 260 патрубка 220, 230. Канал патрубка 252, 262 предпочтительно составляет 0,03429 см (0,0135 дюйма) в диаметре и проходит вдоль продольной оси, B, патрубка 220, 230, пересекая поперечный канал патрубка 254, 264, канал предпочтительно имеющий диаметр 0,0762 см (0,030 дюйма) и расположенный на 0,27178 см (0,107 дюймов) от дистального конца 252, 262. Дополнительно, посадочное место патрубка 220, 230 будет контактировать с якорем 300, как описано более подробно ниже, и предпочтительно имеет диаметр 0,0508 см (0,020 дюймов), расположенное вдоль продольной оси и, предпочтительно имеющее перпендикулярность смещения до 0,00127 см (0,0005 дюйма) по отношению к цилиндру, сформированного по диаметру сечения а также входной патрубок и выхлопной патрубок 220, 230 вдоль продольной оси, В, как показано на Фиг. 5 с указателем фA.
[0050] Предпочтительные размеры регулировочного винта смещения 240 определяются следующим образом. Регулировочный винт смещения 240 имеет ступенчатую цилиндрическую конфигурацию, предпочтительный диаметр которого 0,26416 см (0,104 дюйма) для длины 0,60452 см (0,238 дюймов) в сечении а; диаметр 0,36068 см (0,142 дюйма) для длины 0,30988 см (0,122 дюймов) в сечении б; включая сечение б с предпочтительным резьбовым участком M4×0,35 длиной в 0,20574 см (0,081 дюймов). Дополнительно, предпочтительный угол фаски 30 на дистальном конце 291, а также верхняя уплотнительная выемка 294 имеет высоту предпочтительно 0,09906 см (0,039 дюйма) и внутренний диаметр 0,1905 см (0,075 дюйма), включая верхнюю поверхность уплотнения 292а предпочтительно 0,12954 см (0,051 дюйма) от дистального конца 291.
[0051] Ссылаясь на Фиг. 7, якорь 300 примера ЗПП 10 изготавливают из единого непрерывного листа металла с интегрирующей тяговой частью 320; уплотненная часть 340; установочная часть 360; Е-зажимная часть 380; рельефный шарнир снятия напряжения 382; шарнир смещения 384; уплотнитель 386. Якорь 300 предпочтительно имеет удлиненно овальную форму, если смотреть на вид сверху на Фиг. 7, и предпочтительно содержит рельефы в структуре (если смотреть в поперечном сечении) с образованием стержней или шарниров и частей, перечисленных выше. То есть, тяговая часть 320 образована на первом конце 321 якоря 300, имеющая в основном круглую форму секции 322, содержащая сектор 323, отделенного от секции 322 круглой формы в виде неправильного шестиугольника. Сектор 323 шарнирно прикреплен к тяговой части 320 посредством шарнира для снятия внутренних напряжений 382. Как проиллюстрировано на Фиг. 7, утолщенная часть 340, как правило, формируется из сектора 323, приложенного к секции 341 в форме замочной скважины, в том числе рельефы в структуре для формирования шарнира смещения 384 и уплотненного шарнира 386, который оперативно соединяет лицевую часть 340 E-зажимной части 380, описанной более подробно ниже. E-зажимная часть 380 обеспечивает основную силу смещения якоря 300 необходимую для создания бистабильного или запирающего действия на примере ЗПП 10. То есть, якорь 300 содержит направляющие, которые определяют горизонтальную ось вращения, R, якоря 300. Изгиб, созданный направляющими (на пример стержень), образуют угловую пружину, которая работает совместно со смещающей пружиной 150, обеспечивая оперативную обратную силу, как описано более подробно ниже.
[0052] Снова ссылаясь на Фиг. 7, направляющая часть 320 прикреплена к прикрывающей части 340 через шарнир снятия напряжения 382. Сектор 323 шарнирно прикреплен к тяговой части 320 посредством шарнира для снятия внутренних напряжений 382. Магнитное поле, генерируемое путем протекания постоянного тока через катушку 130 образует электромагнит в цилиндрическом сердечнике 114. Электромагнит создает соответствующую магнитную силу, и соответствующий момент силы на оси вращения, R, прилагая тяговую часть 320 якоря 300 к цилиндрическому сердечнику 114; при контакте срабатывает кольцевой ограничитель хода движения 152. После того, как тяговая часть 320 якоря 300 контактирует с кольцевым ограничителем хода 152 магнитная схема «закрывается» и остаточный магнитный поток, или присутствующая остаточная намагниченность в магнитной схеме удерживает якорь 300 притягивая к цилиндрическому сердечнику 114; даже если ток больше не пропускается через катушку 130.
[0053] Особенность в том, что этот приведенный момент, вызванный постоянным током, преодолевает момент смещения, представленный E-зажимной частью 380, притягивает тяговую часть 320 и уплотненную часть 340, перемещая по оси вращения R, в направлении к катушке 130, контактирующей с кольцевым ограничителем хода 152. Тяговая часть 320 и уплотненная часть 340 будут контактировать с кольцевым ограничителем хода 152 (т.е. с фиксацией положения якоря) до тех пор, пока приведенный момент не окажется большей величины, чем момент смещения пытающийся поднять тяговую часть 320 в обратном направлении от катушки 130 и кольцевого ограничителя хода 152.
[0054] В качестве альтернативы, приложение противоположной полярности и величины тока катушки вызовет магнитное и тяговое усилие, соответствующее магнитному моменту, уменьшая нижний момент смещения, прикладываемый к тяговой части 320 и уплотненной части 340, при котором тяговая часть 320 выйдет из кольцевого ограничитель хода 152 и уплотненная часть 340 и тяговая часть 320 будут переключаться в положениях от катушки 130. Такое переключающееся движение якоря 300 обеспечивает переменный контакт с инжектором входного патрубка 253 и инжектором выхлопного патрубка 263, модулируя проходящий поток примера ЗПП 10. Помимо обеспечения соединения между тяговой частью 320 и уплотненной частью 340 с целью передачи усилия, шарнир снятия напряжения 382 также служит в качестве средства, позволяющего тяговой части 320 выравнивать свою площадь к поверхности катушки при присутствии небольших рассогласований между лицевой частью катушки 132 и поверхностью тяговой части 320 якоря. Такие ошибки могут возникнуть в результате механической обработки ошибок допуска в удлиненной овальной камере 211 или от нежелательного искажения или деформации присутствующих в якоре 300. Уплотненная часть 340 представляет собой жесткую область, которая подвешена через герметизирующую часть шарнира 386 и представляет собой часть якоря 300, обеспечивая перемещение с переменным контактированием с входным патрубком 220 и выхлопным патрубком 230 во время работы. Уплотненная часть шарнира 386 ограничивает герметизирующую часть 340 от углового движения вокруг оси вращения, R. Как было описано выше, входной патрубок 220 и выхлопной патрубок 230 имеют предпочтительное поперечное смещение на 0,00127 см (0,0005 дюйма). Такое смещение обеспечивает значительное сокращение утечки в зоне контакта, определяемое отверстием инжектора патрубка 253, 263.
[0055] Для обеспечения регулировки значения для достижения согласованного порога срабатывания от устройства к устройству, регулируемое смещение момента обеспечивается через E-зажимную часть 380. Этот момент смещения прикладывается к уплотненной части на оси вращения, R, и работает в оппозиции к магнитному моменту, влияя на высвобождение тяговой части 320 от катушки 130 и кольцевого ограничителя хода 152. Регулировочный винт смещения 240 обеспечивает статическую регулировку, что делает переключения или би-стабильную работу якоря происходящими при желаемых уровнях тока катушки. Момент смещения создается E-зажимной частью 380, регулировочным винтом регулировки 240, смещающей пружиной 150, шарниром смещения 384 и уплотненной частью шарнира 386. Для установки момента смещения на правильном уровне, регулировочный винт регулировки смещающей пружины 240 поворачивается в положение точки, в которой операция переключения якоря 300 происходит, когда якорь 300 притягивается катушкой при токах, проходящих через рабочие точки. Вращение регулировочного винта смещающей пружины 240 вызывает смещение на кончике винта 240, что приводит к изменению углового смещения E-зажимной части 380, так как Е-зажимная часть 380 поворачивается вокруг оси вращения, R, определяемой четырьмя шарнирами, описанных выше.
[0056] В результате изменение угла E-зажима 380 вызывается соответствующее изменение угла смещения, определяемого уплотненной частью шарнира 386. Этот угол соответствует предварительному натяжению или намотке момента, приложенному к уплотненной части 340 относительно оси вращения, R. Таким образом, регулировка винта 240 приводит к корректировке момента смещения, приложенного к уплотненной части 320 и обеспечивает противовес "обнуление" или компенсацию уплотненной части 320 для желаемой операции. Уклон предварительной нагрузки пружины 150 обычно используется для обеспечения нагрузки на второй поверхности якоря 300 на достаточном уровне для удержания Е-зажимной части 380 в постоянном контакте с дистальным концом 291 регулировочного винта смещающей пружины 240. В альтернативном примере ЗПП 10, смещение предварительной нагрузки пружины 150 может быть исключено из конструкции, так как балансировка E-зажимной части 380, может быть достаточной, для поддержания контакта с концом регулировочного винта смещающей пружины 240. Кроме того, регулировочный винт смещающей пружины 240 может быть впоследствии исключен из примера ЗПП 10 и заменен фиксированным изгибом на контролируемую высоту для обеспечения равномерного угла Е-зажимной части.
[0057] Якорь 300 может быть изготовлен из материала, обладающего магнитной проводимостью, толщина которого предпочтительно в 0,0508 см (0,020 дюйма) и рельефы, образующие смещения шарнира 384, уплотненного шарнира 386, и для шарнира снятия внутренних напряжений 382 предпочтительно толщиной в 0,016 см (0,0063 дюйма). Якорь 300 предпочтительно может быть изготовлен из магнитного металла, такого как углеродистая сталь марки UNS G10100 с антикоррозионным покрытием, используя никелевое электролизное платирование предложенное Atotech USA of Rock Hill, South Carolina, формирующее толщину слоя в диапазоне от 4 мкм до 6 мкм, и предпочтительно в 5 мкм. Кроме того, альтернативный вариант пассивации может включать покрытие Parylene Coating Service of Katy, Texas или покрытия Ballinit® компании Oerlikon Balzers Coating of Schaumburg, Illinois. Путем сопоставления материалов конструкции якоря 300, верхний блок устройства 100 и нижний блок устройства 200, на примере ЗПП может работать при температурном диапазоне примерно от +85 Цельсия до -60 по Цельсию из-за согласования коэффициента теплового расширения (например, предпочтительный коэффициент теплового расширения 12,2 мкм/м °С).
[0058] Тяговая часть 320 предпочтительно имеет круглое поперечное сечение радиусом 0,87376 см (0,344 дюйма), содержащая сектор в 84 градусов 322, α, разделенный на 0,04572 см (0,018 дюйма). E-зажимная часть 380 предпочтительно имеет внешний радиус 0,87376 см (0,344 дюйма) и внутренний 0,72136 см (0,284 дюймов), соответственно. Выступ на E-зажимной части 380 предпочтительно имеет радиус 0,16256 см (0,064 дюйма), расположенный вдоль центральной оси С, якоря 300 на радиус 0,7112 см (0,280 дюйма). Утолщенная часть 340 по внешнему периметру соответствует внутреннему периметру E-зажимной части 380 предпочтительно имеющего разделяющее расстояние в 0,04572 см (0,018 дюймов) от E-зажима 380 с установочной частью 360, имеющей сквозные отверстия 0,15494 см (0,061 дюйма) на одинаковых расстояниях от центральной оси С, и разнесены на 1,48336 см (0,584 дюйма). Угловой участок 383 E-зажима 380 предпочтительно имеет закругление в 18 градусов, β. Рельефы, формирующие шарниры смещения 384, предпочтительно имеют форму 0,0762 см (0,030 дюйма) на 0,0508 см (0,020 дюйма), а шарнир снятия напряжения 382 предпочтительно 0,254 см (0,100 дюйма) на 0,0508 см (0,020 дюйма). Рельефы, образующие уплотненные шарниры 386, предпочтительно 0,1524 см (0,060 дюйма) на 0,0889 см (0,035 дюйма). Кроме того, два отверстия 361а-b в якоре 300, показанные на Фиг. 7, образуют интегрированную монтажную поверхность якоря 300. При монтаже крепежных элементов якоря 310 крепежные элементы проходят через монтажные отверстия якоря и зацепляют нижний блок 200.
[0059] Последующее раскрытие изобретения произведено со ссылкой на описанный выше пример ЗПП 10, Фиг. 1-4. Как проиллюстрировано на Фиг. 8 и 9, пример ЗПП имеет четыре (4) условия, которые определяют его рабочие состояния: Состояние 1; Состояние 2; Состояние 3; Состояние 4. Как объяснено более подробно ниже, Состояние 1 и Состояние 3 представляют собой установленные (или спящие) условия на примере ЗПП 10 и Состояние 2 и Состояние 4 неустановленные (т.е. не бездействующий) условия. В Состоянии 1, входной сигнал через электрические выводы равен нулю (0) мА (т.е. нулевая мощность) и якорь 300 на примере ЗПП 10 слегка поворачивается против часовой стрелки вокруг оси вращения R, как это видно из Фиг. 2 таким образом, что небольшой воздушный зазор образуется между плоской поверхностью 113, катушки 130 и 300 якоря (т.е. без прилегающей к плоской поверхности 113). В описанном примере воздушный зазор составляет примерно 0,01397 см (0,0055 дюйма). Вращение против часовой стрелки, стимулированное моментом силы смещающей пружины, и зазор ограничивается корректировкой входного патрубка 220, служащего в качестве ограничителя хода дополнительного вращения против часовой стрелки с помощью якоря 300. В Состоянии 1, инжектор входного патрубка 220 контактирует или накрывается утолщенной частью якоря 340 и инжектор 262 выхлопного патрубка 230 открывается зазором между выхлопным патрубком 230 и утолщенной частью 340 якоря 300. Давление в выходном отверстии 245, на примере ЗПП 10 сообщенное гидравлически с выхлопным отверстием 235 в Состояние 1, и, как таковое, будет уменьшаться до уровня давления выхлопных газов, таких как атмосферное давление, приводящее к стационарному потоку флюида, как показано стрелками, изображенными на Фиг. 2 и 4, через пример ЗПП 10, который будет равен нулю (0) или по существу равен нулю (0). Давление выпускного отверстия 245 обязательно будет на уровне давления выхлопных газов в данном рабочем Состоянии 1 и будет фиксироваться при таком давлении из-за запирающей силы созданной Е-зажимной частью 380 до ненулевого электрического входной сигнала, поданного к электрическим вводам. Расход электроэнергии на примере ЗПП 10 в Состоянии 1 равен нулю (0) мВт или "нулевой мощности" условие при котором не подается электроэнергия. То есть, по сравнению с преобразователями непрерывного или пропорционального действия пример ЗПП 10 модулирует оба и входной патрубок 220 и выхлопной патрубок 230 в противоположном или поочередном способами, которые по существу исключают режим покоя отбирающий рабочий поток флюида (т.е. постоянное стравливание подачи воздуха) примера ЗПП 10.
[0060] Для того, чтобы вызвать изменения в выходном давлении, пример ЗПП 10 должен перейти из Состояния 1 в Состояние 2. То есть, Состояние 2 примера ЗПП 10 является временным переходным состоянием и формируется путем применения ненулевого сигнала постоянного тока (DC) или ненулевого питание электрических проводов катушки 130, таким образом, подключая или активируя пример ЗПП 10. Постоянный ток величиной +6 (мА), подводится к катушке 130, магнитное поле устанавливается таким образом, намагничивает сердечник 114 и втулку, примера ЗПП 10, образованное кольцевым ограничителем хода движения 152, который производит магнитное усилие (то есть силу притяжения) непосредственно примыкая к якорю 300. Как только постоянный ток подключен, магнитная сила может преодолеть или превысить сумму момента пружины якоря 300, образованного Е-зажимной частью 380, как описано выше, и контактный момент входного патрубка 220, которые приводят якорь 300 к вращению относительно оси вращения, R. Ссылаясь на Фиг. 2, якорь 300 будет вращаться в направлении по часовой стрелке. Вращение якоря будет продолжаться до тех пор, пока якорь 300 не вступит в контакт с кольцевым ограничителем хода 152 (то есть не будет в непосредственной близости от плоской поверхности 113). Состояние 2 определяется полностью открытым положением инжектора входного патрубка 220 и закрытием инжектора выхлопного патрубка 230 в зависимости от электрической мощности достаточной для перемещения якоря 300, как описано выше размещая выпускное отверстие 245 в гидравлическом сообщении с входным отверстием 215 размещая давление подачи на выпускное отверстие 245. Следует иметь в виду, что закрытие либо входного патрубка 220 или выхлопного патрубка 230 происходит не до уровня "плотный пузырь". То есть, при закрытии либо инжектора входного патрубка 252 или инжектора выхлопного патрубка 262, может проявляться небольшая утечка между инжекторами 252, 262 и якорем 300. Тем не менее, в Состоянии 2, как объемный поток (т.е. поток, порожденный положительным градиентом давления от гидравлически сообщающихся открытого входного отверстия и закрытого выхлопного отверстия) из входного патрубка 220 значительно превосходит незначительную утечку в выхлопном патрубке 230, таким образом, увеличивая давление флюида в камере и в выпускном отверстии 245, по существу, равное давлению входного отверстия 215, такому, как 138 кПа (20 фунтов на квадратный дюйм). Потребление электроэнергии в Состоянии 2 отличается от нуля в связи с применением тока активации в 6 мA.
[0061] Применяя сигнал для активации Состояния 2, образуется переход к новому состоянию давления на выходе, пример ЗПП 10 может быть возвращен в состояние "без питания", эффективно запирая давление выпускного отверстия при давлении подачи. Это состояние "без питания" определяет операционное Состояние 3. Состояние 3 примера ЗПП 10 использует магнитные свойства материалов сборки сердечника и разветвлений, а также якоря, для фиксации или запирания конечного положение активации Состояния 2. То есть, в Состоянии 3, магнитная сила, создаваемая током активации, в сочетании с магнитными свойствами, например ЗПП 10 образуют магнитную остаточную намагниченность в Состоянии 3, четко устанавливая би-стабильный режим работы преобразователя. В частности, сила притяжения магнитной схемы преодолевает момент силы упругости E-зажимной части 380 и начальной силы пружины, удерживая якорь на месте после активации Состояния 2 без необходимости дополнительной электроэнергии. Магнитная сила производит по часовой стрелке момент относительно оси вращения, R, который превышает момент против часовой стрелки, возникающий под действием пружины и всех других оперативных моментов и удерживает якорь у поверхности сердечника 114 и втулки, образованной кольцевым ограничителем хода движения 152. В Состоянии 3, якорь становится зафиксированным, не расходуя электрической мощности, обычно используемой для поддержания этого состояния. Состояние 3 поддерживает выходное давление выпускного отверстия 245, по существу равное давлению подачи. Якорь примера ЗПП 10, и, следовательно, давление на выходе, может оставаться в определенном состоянии, пока не измениться входной сигнал на электрических вводах. Потребление электроэнергии равно нулю (0) или в "нулевой мощности" условие для Состояния 3.
[0062] Окончательное эксплуатационное условие определяется Состоянием 4, что соответствует изменению пневматического выхода от давления подачи до давления выхлопных газов (например, атмосферного давления). Для того, чтобы инициировать переход из Состояния 3 в Состояние 4, величина и "направление" постоянного тока должны быть изменены. То есть, ток восстанавливается от знака направления по отношению к постоянному току, приложенному в Состоянии 2. В общем случае, в качестве постоянного тока уровень -2мА, прикладывается к катушке с помощью электрических проводов, а магнитное поле создается вокруг катушки противодействуя намагничивающей силе Состояния 2, преодолевая или разрушая остаточную намагниченность, установленную в Состоянии 2 тем самым обесточивая или деактивируя пример ЗПП 10. По мере того как остаточная намагниченность преодолевается в электромагнитной схеме, момент пружины, как описано выше приводит в движение якорь 300 в направлении против часовой стрелки по отношению к оси вращения R. Якорь 300 движется в этом направлении к останавливающим контактам, образованными дистальным концом 250 входного патрубка 220 эффективно накрывая или закрывая входное отверстие. В Состоянии 4, давление в выпускной камере и, следовательно, в выпускном отверстии 245 быстро спадает до давления выхлопных газов (т.е. потоком, порожденным отрицательным градиентом давления, гидравлически сообщенным с выхлопным отверстием при его открытии, и закрытии входного отверстия). Давление выпускного отверстия примера ЗПП 10 обязательно будет на уровне давления выхлопных газов, в этом Состоянии 4, а потребление электроэнергии на примере ЗПП 10 в Состоянии 4 отличается от нуля в связи с применением -2 мА де-активационного тока. После активации Состояния 4, пример ЗПП 10 может перейти непосредственно в Состояние 1, когда фиксирующее действие завершается, и сигнал де-активации "удален" или равен нулю (0) мА, по существу эквивалентный сигналу активации в Состоянии 1 примера 10 ЗПП.
[0063] Необходимые сигнал активации и модуль контроля предлагаются на примере ЗПП 10 и показаны на Фиг. 9 и Фиг. 10. Пример ЗПП 10 хорошо подходит для приложений, требующих минимального энергопотребления. Бистабильный, запирающий характер конструкции значительно снижает энергопотребление, так как Состояние 1 и Состояние 3 не требуют применения какой-либо электрической энергии для поддержания давления на выходе. Дополнительно, импульсы тока (+6 мA и -2 мA) имеют минимальное применение в Состоянии 2 и 4, даже во время активации или деактивации, по этому требования к потребляемой мощности на примере ЗПП 10 значительно снижены по сравнению с обычными преобразователями. Как показала практика, периодическая поочередность включения и выключения тока составляет 15 миллисекунд (мс).
[0064] Фиг. 9 дополнительно иллюстрирует кривую выходного давления на примере переходов между состояниями примера ЗПП 10. На иллюстрации изображен переход Состояния 1 → Состояние 2 → состояние 3. То есть, давление на выходе примера ЗПП 10, равно по существу давлению выхлопных газов в Состоянии 1 (т.е. атмосферному давлению или состоянию низкой производительности). Активации сигнала +6 мА продолжительностью 15 мс применяется к примеру ЗПП. Как описано выше, пример ЗПП 10 переходит из Состояния 1 в Состояние 2, с фиксацией на выходе примера ЗПП 10 для подачи давления; затем сигнал активации удаляется и пример ЗПП 10 переходит в Состояние 3, в котором выходное давление остается на входе или подачи давления (т.е. состояние высокой производительности). В качестве альтернативы, иллюстрация B изображает кривую выходного давления и входного сигнала или активации перехода примера ЗПП 10 из Состояния 3 → в Состояние 4 → в Состояние 1. То есть, давление на выходе примера ЗПП 10 в иллюстрации B запирается при давлении подачи в Состоянии 3. Как было описано ранее, происходит активация сигнала уровнем в -2 мА и длительностью в 15 мс. Таким образом, пример ЗПП 10 переходит из Состояния 3 в Состояние 4, запирая выход примера ЗПП 10 до давления выхлопных газов; затем сигнал активации удаляется, и пример ЗПП 10 переходит в Состояние 1.
[0065] Фиг. 10, 11А и 11В иллюстрирован вариант модуля и логические схемы управления для создания управляющих сигналов для примера ЗПП 10. Ссылаясь на Фиг. 10, модуль управления 400 будет описан ниже. Пример ЗПП 10 управляется с помощью обычных электронных средств. Модуль 400 управления обеспечивает прохождение входного сигнала от схемы управления, такие как схема управления положением, с использованием обратной связи по датчиках положения, расположенных на обычном пневматическом исполнительном приводе, соединенными с управляющим клапаном (не показан). Как понятно любому специалисту в данной области техники, входной сигнал может быть получен из алгоритма следящего типа, контролируя выходное давление примера ЗПП 10 для достижения требуемого положения или установки команды сервомотору. Пример модуля контроля 400 содержит следующие компоненты: микроконтроллер 410, цифровой-аналоговый преобразователь (ЦАП) 420, такой как 16-разрядный ЦАП, линейный преобразователь напряжение-ток 430. В процессе работы сигнал ввода команд может быть обеспечен на микроконтроллер 410, который изменяет или интерпретирует команду для активации (активизации) или деактивации (обесточивание) примера ЗПП 10. На основании предыдущих описаний и примеров профилей приведения в действие, профиль активации для активизации примера ЗПП 10 иллюстрируется в таблице А на Фиг. 10. и логические алгоритмы на Фиг. 11А. То есть, чтобы активировать пример ЗПП 10 входная команда интерпретируется микроконтроллером 410. Микроконтроллер 410 генерирует цифровую команду на ЦАП 420, преобразующий цифровой код в аналоговый сигнала, представляющий такой сигнал. Аналоговый выход ЦАП 420 соединен с линейным преобразователем напряжения-ток 430, преобразующий сигнал определенного уровня напряжения в сигнал постоянного тока определенного уровня, который приводит в действие пример ЗПП 10.
[0066] Например, как проиллюстрировано на Фиг. 11А, подпрограмма в микроконтроллер 410 инициируется, когда происходит запрос командного сигнала, этап S100. Для генерации импульса активации или сигнал для примера ЗПП 10, микроконтроллер 410 генерирует цифровой сигнал, представляющий 0 мА (т.е. команда 8000 в 16-ом коде из таблицы А), шаг S101, поддерживающий текущее состояние примера ЗПП 10, такое как Состояние 1, шаг S102. Для генерирования сигнала активации +6 мA, микроконтроллер 410 генерирует цифровой сигнал, представляющий +6 мА (т.е. команда A666 16-ом коде из таблицы А), шаг S102, и условно утверждает, что выход установиться за 15 мс, шаг S104, вызывая Состояние 2 примера ЗПП 10. По истечении времени активации в 15 мс, микроконтроллер 410 генерирует цифровой сигнал, представляющий 0 мА (т.е. команду 8000 в 16-ом коде из таблицы А), шаг S105, поддерживающий текущее состояние примера ЗПП 10, такое как Состояния 3, шаг S106.
[0067] Как проиллюстрировано на Фиг. 11B, чтобы сгенерировать импульс или сигнал деактивации для примера ЗПП 10, микроконтроллер 410 генерирует цифровой сигнал, представляющий 0 мА (т.е. команда 8000 в 16-ом коде из таблицы А), шаг S201, поддерживающий текущее состояние примера ЗПП 10, такое как Состоянии 3, шаг S202. Для генерирования сигнала активации -2 мА, микроконтроллер 410 генерирует цифровой сигнал, представляющий -2 мА (т.е. команда 6666 в 16-ом коде из таблицы А), шаг S202, и условно утверждает, что выходной сигнал в течение 15 мс устанавливается, шаг S204 индукция Состояния 4 примера ЗПП 10. По истечении времени активации в 15 мс, микроконтроллер 410 генерирует цифровой сигнал, представляющий 0 мА (т.е. команда 8000 в 16-ом коде из таблицы А), шаг S205, поддерживающий текущее состояние примера ЗПП 10, такое как Состояния 4, шаг S206.
[0068] Пример ЗПП стоит меньше, чем изготовление пьезоэлектрических клапанов и имеет меньший предел температуры, чем температурный предел, соответствующих биморфных пьезоэлектрические конструкций. Пример ЗПП может работать в температурном диапазоне примерно от +85 по Цельсию до -60 по Цельсию из-за согласования коэффициента теплового расширения верхнего кожуха и нижнего кожуха, входного патрубка, выхлопного патрубка и якоря. Кроме того, пример ЗПП является существенно более надежным в промышленной среде, в том числе при повышенной влажности, из-за пассивации открытых поверхностей.
[0069] В дополнительном варианте пример ЗПП может работать при давлении источника пневмопитания в диапазоне примерно от 138 кПа (20 фунтов на квадратный дюйм) до 1034 кПа (150 фунтов на квадратный дюйм).. В результате возможности полного диапазона входного давления, никакого дополнительного регулятора давления не требуется для регулирования источника давления, приложенного к примеру ЗПП. Дополнительно, традиционные конструкции преобразователей используют пневматическую схему, состоящую из одного модулированного выхлопного клапана флюида, соединенного с инжектором подачи фиксированного диаметра. Такая конфигурация модулирует поток выхлопных газов против потока подачи, сообщающегося через отверстие фиксированного диаметра. Такое дросселирование требует определенного стационарного потока (т.е. отличающегося от нуля устойчивого состояния) через оба модулированного и фиксированного с ограничением, что увеличивает расход воздуха. Пример ЗПП периодически модулирует поток флюида через входной патрубок и выхлопной патрубок, по существу устраняя постоянный поток через преобразователь.
[0070] Как было указано выше, расход электроэнергии требуется для поддержания пневматической схемы примера ЗПП либо в состоянии высокой производительности или в состоянии низкой производительности, когда выход равен нулю (0) мВт и, наконец, соединения входного отверстия и выхлопного отверстие можно поменять местами, обеспечивая реверсивный режим для примера ЗПП. Эта возможность обеспечивает дополнительную гибкость в конструкции приборов, в которых с помощью реверсирования соединения под давлением уменьшая потребность в дополнительных трубопроводах для флюида или трубок, обеспечивая конфигурируемость операции для прямого или реверсивного действий.
[0071] Хотя некоторые примерные способы, устройства и промышленные изделия были описаны в данном документе, сфера охвата данного патента не ограничивается этим. Напротив, этот патент охватывает все методы, аппараты, и промышленные продукты, довольно попадающие в объем прилагаемой формулы изобретения либо буквально, или в соответствии с доктриной эквивалентов. Например, катушка, намотанная на бобину, может обеспечить электромагнит верхнего блока устройства. Кроме того, дополнительные магнитные стали или сплавы, такие как Carpenter 49 могут быть использованы для обеспечения электромагнитной схемы, не выходящие за пределы сущности и объема данного примера ЗПП.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОТКАЗОУСТОЙЧИВЫЙ ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2765400C2 |
| ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2765399C2 |
| Электропневматическое управляющее устройство | 1979 |
|
SU954937A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2352974C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РЕГУЛИРУЕМОГО КЛАПАНА С ПНЕВМОУСИЛИТЕЛЕМ | 2007 |
|
RU2439339C2 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2004 |
|
RU2255250C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1990 |
|
RU2005943C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОГО СИГНАЛА В ПНЕВМАТИЧЕСКИЙ | 2013 |
|
RU2516749C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2053376C1 |
| Электропневматический дискретный преобразователь | 1990 |
|
SU1836589A3 |






Преобразователь для соединения с источником флюида под давлением содержит механизм для установки пневматического выходного сигнала посредством электрического входного сигнала. Преобразователь предоставляет сборку нижнего кожуха и сборку верхнего кожуха. Сборка нижнего кожуха содержит нижний кожух, выполненный с возможностью присоединения входного патрубка. Входной патрубок находится в гидравлическом сообщении с входным отверстием и периодически находится в гидравлическом сообщении с выходным отверстием нижнего кожуха через внутренний флюидный перепускной канал. Нижний кожух дополнительно содержит выхлопной патрубок, находящийся в гидравлическом сообщении с выхлопным отверстием, и периодически находится в гидравлическом сообщении с выходным отверстием нижнего кожуха через внутренний флюидный перепускной канал. Сборка верхнего кожуха содержит верхний кожух, выполненный с возможностью присоединения катушки и якоря таким образом, что верхний кожух, катушка и якорь определяют запирающую электромагнитную схему, которая обеспечивает периодический контакт якоря с входным патрубком и выхлопным патрубком сборки нижнего кожуха. Технический результат – упрощение конструкции. 3 н. и 21 з.п. ф-лы, 11 ил.
1. Электропневматический преобразователь, содержащий:
нижний блок устройства, содержащий нижний кожух, выполненный с возможностью присоединения входного патрубка, находящегося в гидравлическом сообщении с входным отверстием, а также находящегося в периодическом гидравлическом сообщении с выходным отверстием нижнего кожуха через внутренний флюидный перепускной канал, при этом нижний кожух дополнительно содержит выхлопной патрубок, находящийся в гидравлическом сообщении с выхлопным отверстием, а также находящийся в периодическом гидравлическом сообщении с выходным отверстием нижнего кожуха через внутренний флюидный перепускной канал; и
верхний блок устройства, содержащий верхний кожух, выполненный с возможностью присоединения катушки и якоря, причем верхний кожух, катушка и якорь образуют запирающую электромагнитную схему, которая обеспечивает периодический контакт якоря с входным патрубком и выхлопным патрубком сборки нижнего кожуха,
при этом нижний кожух дополнительно выполнен с возможностью приема регулировочного винта смещающей пружины, а верхний кожух дополнительно выполнен с возможностью приема смещающей пружины, причем смещающая пружина и винт регулировки смещающей пружины взаимодействуют для обеспечения усилия смещающей пружины при смещении якоря электромагнитной схемы.
2. Электропневматический преобразователь по п. 1, отличающийся тем, что катушка выполнена с возможностью приема входного электрического сигнала для активации и деактивации электромагнитной схемы, с тем чтобы таким образом запирать выходное отверстие при состоянии высокой производительности и состоянии низкой производительности.
3. Электропневматический преобразователь по п. 2, отличающийся тем, что он выполнен с возможностью периодически модулировать поток флюида через входной патрубок и выходной патрубок для устранения постоянного потока через преобразователь.
4. Электропневматический преобразователь по п. 1, отличающийся тем, что выполнен с возможностью соединения с источником пневмопитания, и преобразователь дополнительно выполнен с возможностью работы от источника пневмопитания при давлении в диапазоне примерно от 138 кПа (20 фунтов на квадратный дюйм) до 1034 кПа (150 фунтов на квадратный дюйм).
5. Электропневматический преобразователь по п. 1, отличающийся тем, что заданный коэффициент температурного расширения сборки верхнего кожуха и сборки нижнего кожуха содействуют обеспечению диапазона рабочих температур от около +85 градусов по Цельсию до -60 градусов по Цельсию.
6. Электропневматический преобразователь по п. 1, отличающийся тем, что внутренний гидравлический перепускной канал дополнительно содержит камеру давления, канал входного отверстия, канал выхлопного отверстия и выпускной канал.
7. Электропневматический преобразователь по п. 5, отличающийся тем, что входной патрубок и выхлопной патрубок имеют заданную ортогональность по отношению к цилиндру, образуемому первым участком входного патрубка и выхлопным патрубком вдоль продольной оси входного патрубка и выхлопного патрубка.
8. Электропневматический преобразователь по п. 2, отличающийся тем, что якорь содержит множество шарниров, обеспечивающих момент силы упругости, противоположный моменту магнитной силы, обеспечивая запирание якоря поочередно непосредственно примыкающим к и не примыкающим к верхнему кожуху.
9. Запирающий электропневматический преобразователь, содержащий:
пневматическую схему, содержащую нижний кожух, имеющий входное отверстие, выхлопное отверстие и выпускное отверстие, находящиеся в гидравлическом сообщении через внутренний флюидный перепускной канал и камеру высокого давления;
электромагнитную схему, содержащую верхний кожух, выполненный с возможностью приема катушки и якоря, причем якорь подвижен в ответ на электрический входной сигнал, а якорь содержит множество шарниров, обеспечивающих момент силы упругости, при этом электромагнитная схема дополнительно определяет момент магнитной силы, противоположный моменту силы упругости, причем запирание якоря поочередно непосредственно примыкающим к и не примыкающим к верхнему кожуху обеспечивается моментом силы упругости и моментом магнитной силы,
при этом нижний кожух дополнительно выполнен с возможностью приема регулировочного винта смещающей пружины, а верхний кожух дополнительно выполнен с возможностью приема смещающей пружины, причем смещающая пружина и винт регулировки смещающей пружины взаимодействуют для обеспечения усилия смещающей пружины при смещении якоря электромагнитной схемы.
10. Запирающий электропневматический преобразователь по п. 9, отличающийся тем, что мощность электрического сигнала по существу равна нулю в моменты, когда якорь запирается, непосредственно примыкая к и не примыкая к верхнему кожуху.
11. Запирающий электропневматический преобразователь по п. 9, отличающийся тем, что входной патрубок находится в гидравлическом сообщении с входным отверстием и в периодическом гидравлическом сообщении с выходным отверстием через внутренний флюидный перепускной канал, а выхлопной патрубок находится в гидравлическом сообщении с выхлопным отверстием и в периодическом гидравлическом сообщении с выходным отверстием через внутренний флюидный перепускной канал.
12. Запирающий электропневматический преобразователь по п. 9, отличающийся тем, что запирающий электропневматический преобразователь может быть альтернативно выполнен для операции прямого действия или операции реверсивного действия.
13. Запирающий электропневматический преобразователь по п. 9, отличающийся тем, что указанный преобразователь может функционировать при давлении источника пневмопитания в диапазоне примерно от 138 кПа (20 фунтов на квадратный дюйм) до 1034 кПа (150 фунтов на квадратный дюйм).
14. Запирающий электропневматический преобразователь по п. 9, отличающийся тем, что заданный коэффициент температурного расширения сборки верхнего кожуха и сборки нижнего кожуха содействуют обеспечению диапазона рабочих температур от около +85 градусов по Цельсию до -60 градусов по Цельсию.
15. Запирающий электропневматический преобразователь по п. 9, отличающийся тем, что внутренний флюидный переходной канал дополнительно содержит камеру давления, канал входного отверстия, канал выхлопного отверстия и выпускной канал.
16. Запирающий электропневматический преобразователь по п. 11, отличающийся тем, что входной патрубок и выхлопной патрубок имеют заданную ортогональность по отношению к цилиндру, образуемому первым участком входного патрубка и выхлопным патрубком вдоль продольной оси входного патрубка и выхлопного патрубка.
17. Электропневматический переключающий клапан, содержащий:
нижний кожух и верхний кожух;
пневматическую схему, присоединенную к источнику флюида под давлением;
электромагнитную схему, присоединенную к пневматической схеме, при этом электромагнитная схема содержит якорь, причем нижний кожух дополнительно выполнен с возможностью приема регулировочного винта смещающей пружины, а верхний кожух дополнительно выполнен с возможностью приема смещающей пружины и смещающая пружина и винт регулировки смещающей пружины взаимодействуют для обеспечения усилия смещающей пружины при смещении якоря электромагнитной схемы; и
модуль управления, соединенный с электромагнитной схемой, которая предоставляет первый управляющий сигнал, вызывающий первое состояние пневматической схемы, второй управляющий сигнал, вызывающий второе состояние пневматической схемы, третий управляющий сигнал, вызывающий третье состояние пневматической схемы, и четвертый управляющий сигнал, вызывающий четвертое состояние пневматической схемы.
18. Электропневматический переключающий клапан по п. 17, отличающийся тем, что первый управляющий сигнал и третий управляющий сигнал по существу эквивалентны.
19. Электропневматический переключающий клапан по п. 17, отличающийся тем, что второй управляющий сигнал вызывает переход электропневматического переключающего клапана из первого состояния в третье состояние.
20. Электропневматический переключающий клапан по п. 17, отличающийся тем, что четвертый управляющий сигнал вызывает переход электропневматического переключающего клапана из третьего состояния в первое состояние.
21. Электропневматический переключающий клапан по п. 17, отличающийся тем, что первое состояние пневматической схемы соответствует первому установившемуся состоянию пневматической схемы, при этом второе состояние пневматической схемы соответствует первому неустановившемуся состоянию пневматической схемы, третье состояние пневматической схемы соответствует второму установившемуся состоянию и четвертое состояние соответствует второму неустановившемуся состоянию.
22. Электропневматический переключающий клапан по п. 21, отличающийся тем, что первое установившееся состояние пневматической схемы имеет место при давлении, по существу равном давлению флюида в выхлопном отверстии, и второе установившееся состояния пневматической схемы имеет место при давлении, по существу равном давлению флюида во входном отверстии.
23. Электропневматический переключающий клапан по п. 21, отличающийся тем, что первое неустановившееся состояние пневматической схемы характеризуется положительным градиентом давления внутри пневматической схемы, а второе неустановившееся состояние пневматической схемы характеризуется отрицательным градиентом давления пневматической схемы.
24. Электропневматический переключающий клапан по п. 21, отличающийся тем, что первое неустановившееся состояние пневматической схемы характеризуется отрицательным градиентом давления внутри пневматической схемы, а второе неустановившееся состояние пневматической схемы характеризуется положительным градиентом давления пневматической схемы.
| DE 29711175 U1, 23.07.1998 | |||
| Фиксатор стопы | 1988 |
|
SU1651896A1 |
| DE 4415068 A1, 02.11.1995 | |||
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2352974C1 |
| Электропневматическое управляющее устройство | 1979 |
|
SU954937A1 |

