ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к портативным контрольно-измерительным приборам в системах управления технологическими процессами, а конкретнее, к электропневматическим преобразователям для управления клапаном в системе управления технологическим процессом.
УРОВЕНЬ ТЕХНИКИ
В промышленных технологических установках регулирующие клапаны используют для решения самых разнообразных задач от управления выполнением технологических операций на предприятиях нефтеперерабатывающей промышленности до поддержания уровней текучей среды в резервуарных парках. Регулирующие клапаны, как правило работающие в автоматическом режиме, используют для управления такими потоками текучей среды за счет их действия в качестве отверстия или канала переменного размера. Количество вещества, проходящего через корпус клапана, можно точно регулировать посредством управления внутренним компонентом клапана, например, плунжером клапана. Регулирующий клапан, как правило, работает в автоматическом режиме за счет использования пневматического исполнительного механизма, управляемого посредством портативного контрольно-измерительного прибора с дистанционным управлением. Контрольно-измерительный прибор находится во взаимодействии с компьютером управления технологическим процессом с целью подачи сигналов управления на внесение изменений в величину потока текучей среды в клапане для успешного выполнения требуемого алгоритма управления с помощью пневматических исполнительных механизмов. Электропневматические преобразователи, например, преобразователи электрического токового сигнала в пневматический сигнал, как правило, используют в портативных контрольно-измерительных приборах для выполнения преобразования электрического сигнала в величину волюметрического потока или выходного давления для управления исполнительным механизмом, и в результате, регулирующим клапаном.
Токовые электропневматические преобразователи выполняют либо непрерывное линейное преобразование электрического токового сигнала в пневматический сигнал, либо выполняют преобразование электрического токового сигнала в пневматический сигнал периодически, или в импульсном режиме. Существующие электропневматические преобразователи с непрерывным преобразованием в рабочем режиме постоянно потребляют или отводят воздух. В определенных условиях высокий расход воздуха является недостатком, например, в случае, когда в качестве питающей текучей среды для портативного контрольно-измерительного прибора и электропневматического преобразователя используют технологическую среду, аналогичную природному газу. Например, значительными могут быть затраты, связанные с установкой дополнительной емкости в системе питания для текучей среды. Кроме того, постоянный отвод таких технологических сред является одновременно дорогостоящим и расточительным для окружающей среды. В качестве альтернативы, токовые импульсные электропневматические преобразователи, как правило, основаны либо на пьезоэлектрических устройствах, либо на составных соленоидных конструкциях. Пьезоэлектрические конструкции, например, известные конструкции, предоставляемые компанией Hoerbiger Gmbh (Альтенштадт, Германия), могут быть чрезвычайно энергоемкими и относительно дорогостоящими в использовании. К тому же пьезоэлектрические конструкции ограничены по температуре вследствие того, что ниже приблизительно -20°С величина пьезоэлектрического эффекта начинает снижаться. Кроме того, составные соленоидные конструкции являются сложными и могут быть дорогостоящими в производстве из-за воспроизведения электромагнитного контура.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В первом аспекте данного изобретения предлагается узел нижнего модуля, при этом узел нижнего модуля содержит нижнюю часть корпуса и питающий штуцер. Питающий штуцер находится в сообщении по текучей среде с питающим отверстием и в периодическом сообщении по текучей среде с выходным отверстием нижней части корпуса через внутренний проходной канал для текучей среды. Нижняя часть корпуса дополнительно содержит выхлопной внутренний канал в сообщении по текучей среде с выхлопным отверстием и в периодическом сообщении по текучей среде с выходным отверстием нижней части корпуса через внутренний проходной канал для текучей среды; и узел верхнего модуля. Узел верхнего модуля содержит верхнюю часть корпуса, катушку и якорь, при этом верхняя часть корпуса, катушка и якорь образуют фиксирующий электромагнитный контур, который обеспечивает поочередное контактное усилие якоря над плунжером клапана, расположенного в питающем штуцере узла нижней части корпуса. Катушка выполнена с возможностью приема электрического входного сигнала, чтобы активировать и деактивировать электромагнитный контур, чтобы зафиксировать выходное отверстие в состоянии с высоким уровнем выходного сигнала и состоянии с низким уровнем выходного сигнала, а якорь содержит совокупность шарниров. Шарниры обеспечивают действие момента силы сжатия пружины и противоположно направленного момента силы магнитного поля, что приводит к поочередной фиксации якоря в положении непосредственного контакта с верхней частью корпуса и в не прилегающем к ней положении.
Во втором аспекте данного изобретения предлагается пневматический контур, содержащий нижнюю часть корпуса, имеющую питающее отверстие, выхлопное отверстие и выходное отверстие, сообщающиеся по текучей среде через внутренний проходной канал для текучей среды и камеру давления. Питающее отверстие функционально связано с питающим штуцером, имеющим плунжер клапана, расположенный внутри питающего штуцера. Электромагнитный контур содержит верхнюю часть корпуса, катушку и якорь, причем якорь содержит совокупность шарниров. Шарниры обеспечивают момент силы сжатия пружины, а якорь подвижен в ответ на электрический входной сигнал. Электромагнитный контур определяет момент силы магнитного поля, при этом момент силы сжатия пружины и момент силы магнитного поля действуют совместно с чередующейся фиксацией якоря в непосредственно прилегающем и не прилегающем к верхней части корпуса положениях. Фиксирующий электропневматический преобразователь может быть альтернативно выполнен с возможностью работы в прямом и реверсном режиме.
Кроме того, в соответствии с любым одним или большим количеством из предшествующих первого, второго или третьего аспектов, устройство или устройства, как описано выше, могут дополнительно включать в себя одну или большее количество следующих предпочтительных форм.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
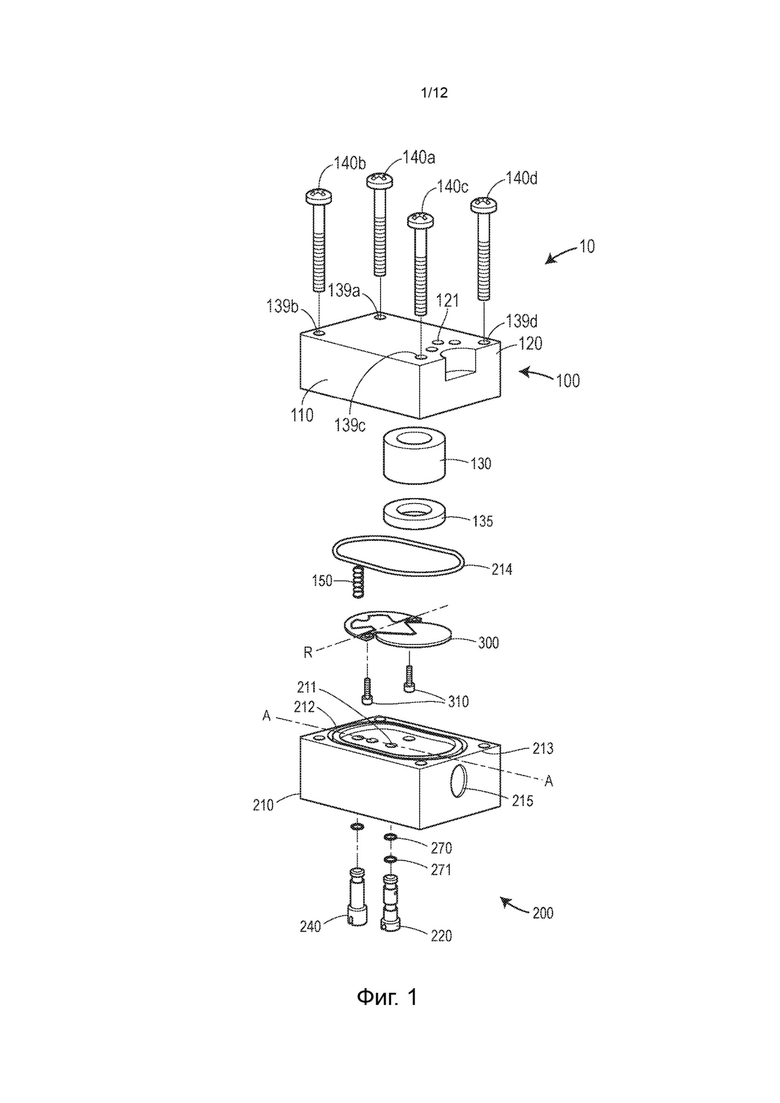
Фиг. 1 представляет собой подетальное аксонометрическое изображение типового преобразователя, выполненного в соответствии с принципами изобретения по данному описанию.
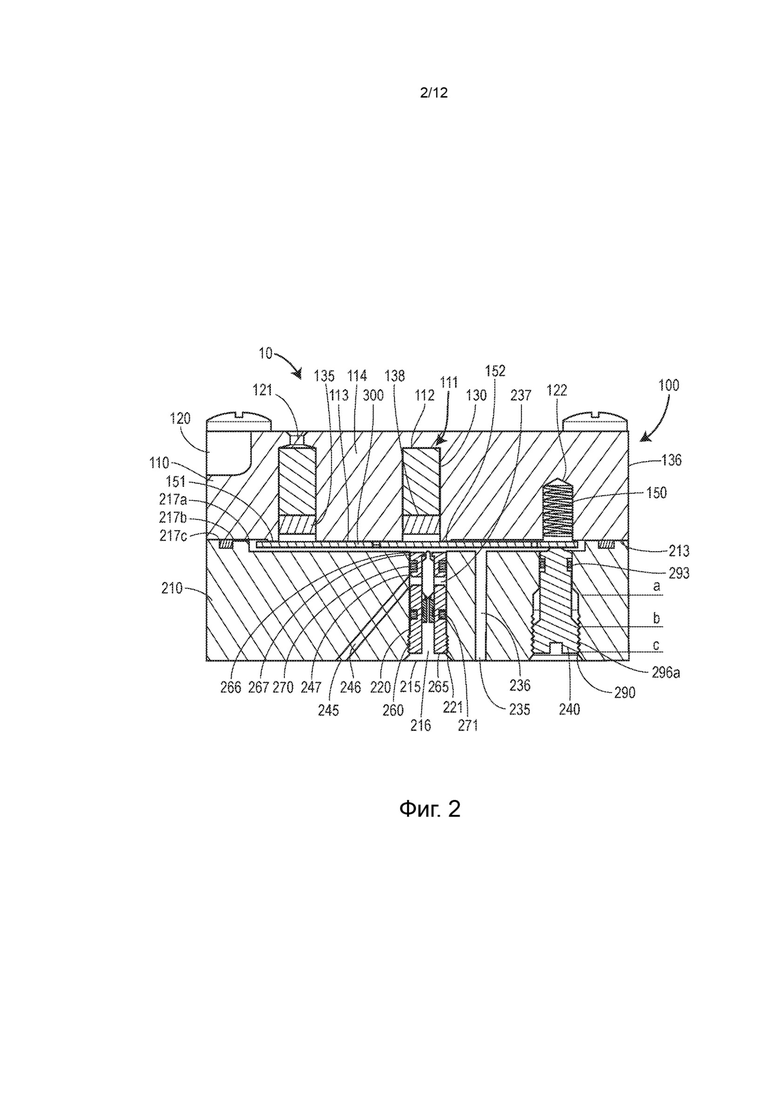
Фиг. 2 представляет собой изображение в поперечном разрезе типового преобразователя, выполненного в соответствии с принципами изобретения по данному описанию.
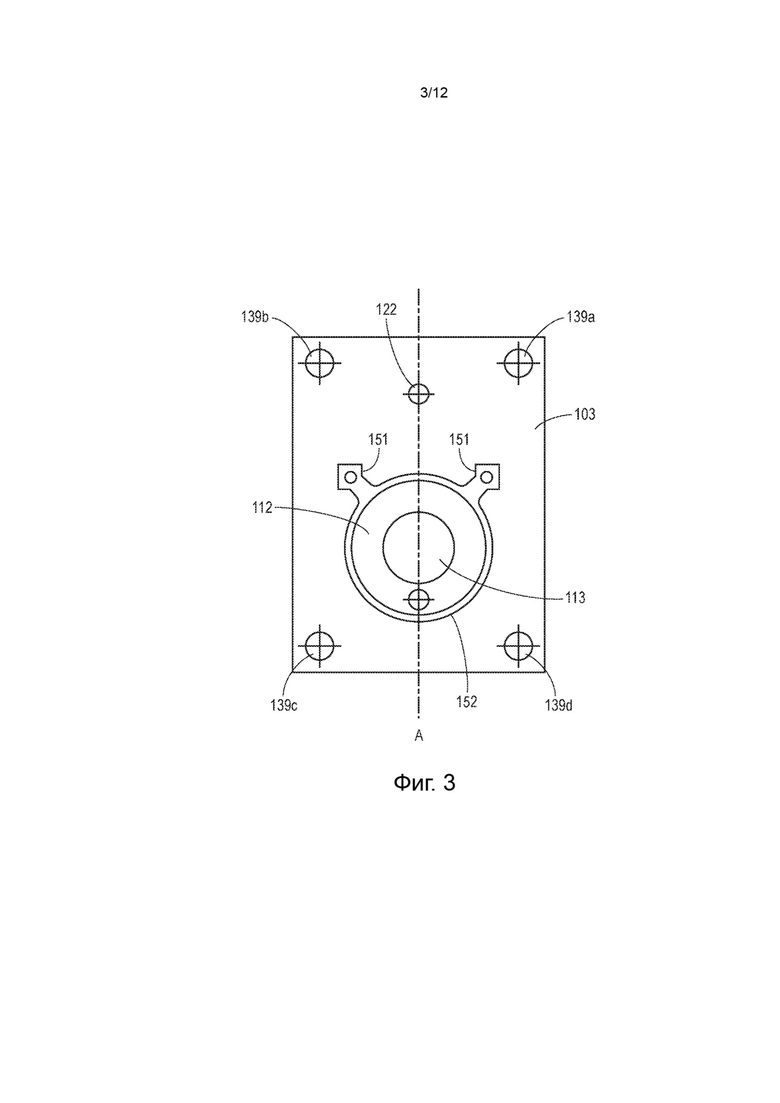
Фиг. 3 представляет собой изображение горизонтальной проекции верхнего модуля типового преобразователя, выполненного в соответствии с принципами изобретения по данному описанию.
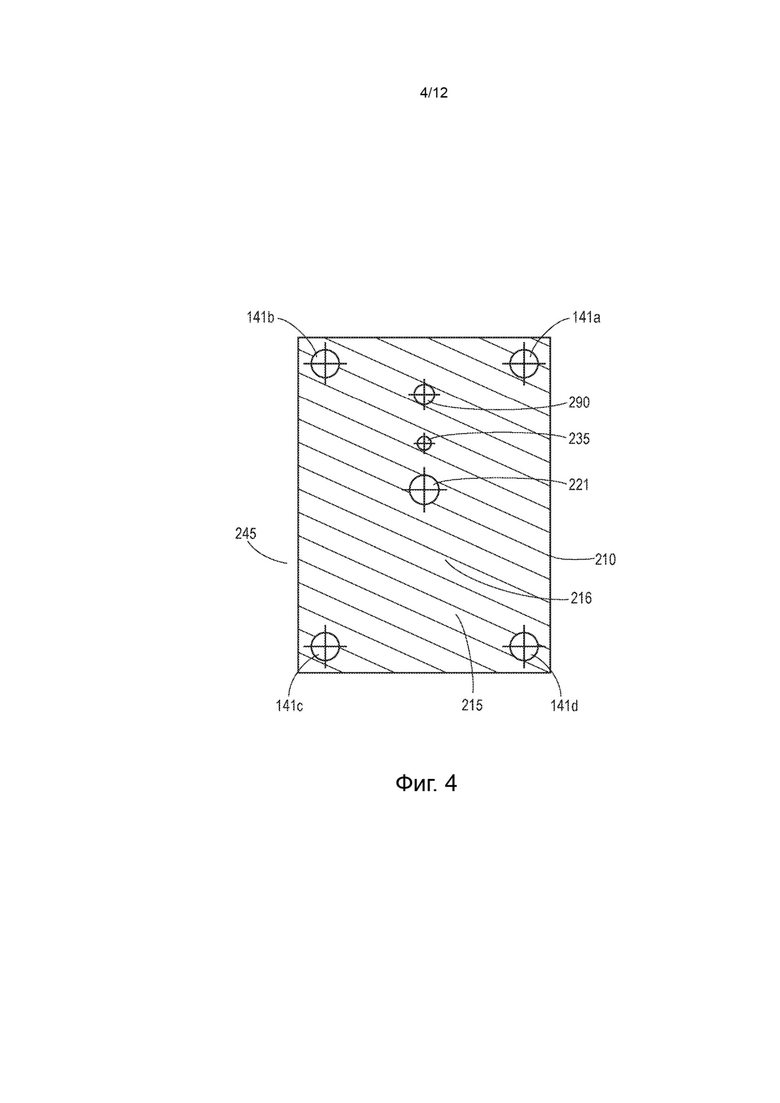
Фиг. 4 представляет собой изображение горизонтальной проекции в поперечном разрезе нижнего модуля типового преобразователя, выполненного в соответствии с принципами изобретения по данному описанию.
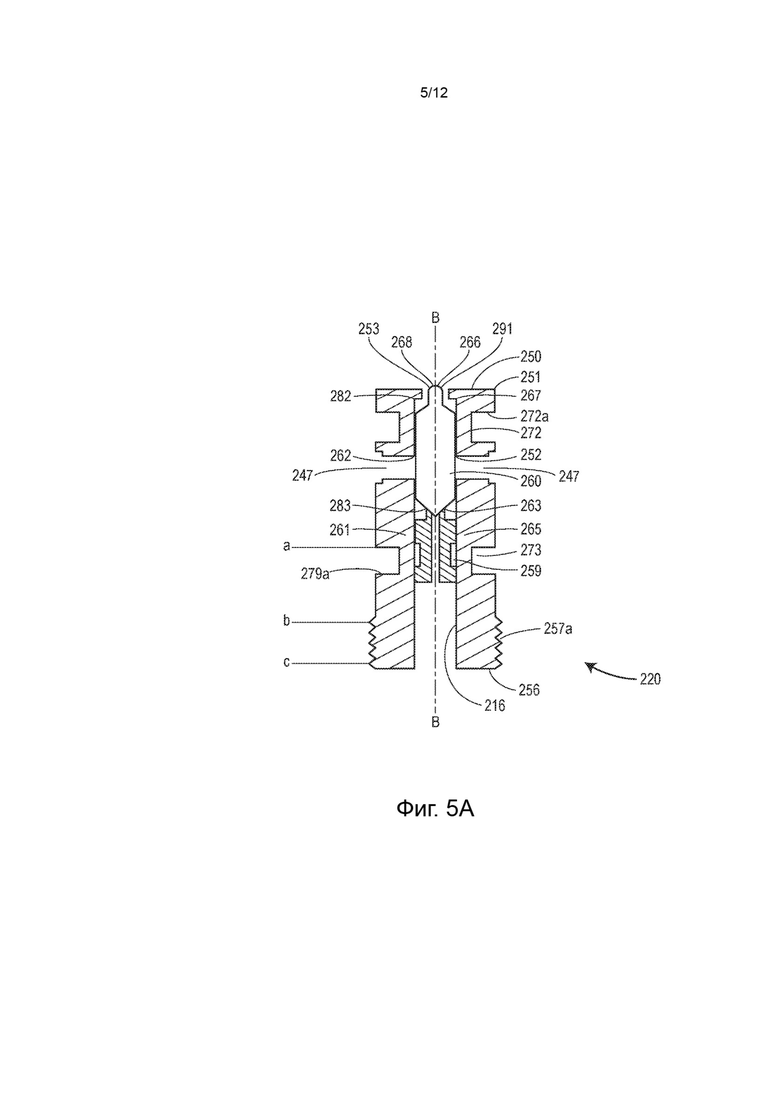
Фиг. 5А представляет собой изображение в поперечном разрезе питающего штуцера типового преобразователя, выполненного в соответствии с принципами изобретения по данному описанию.
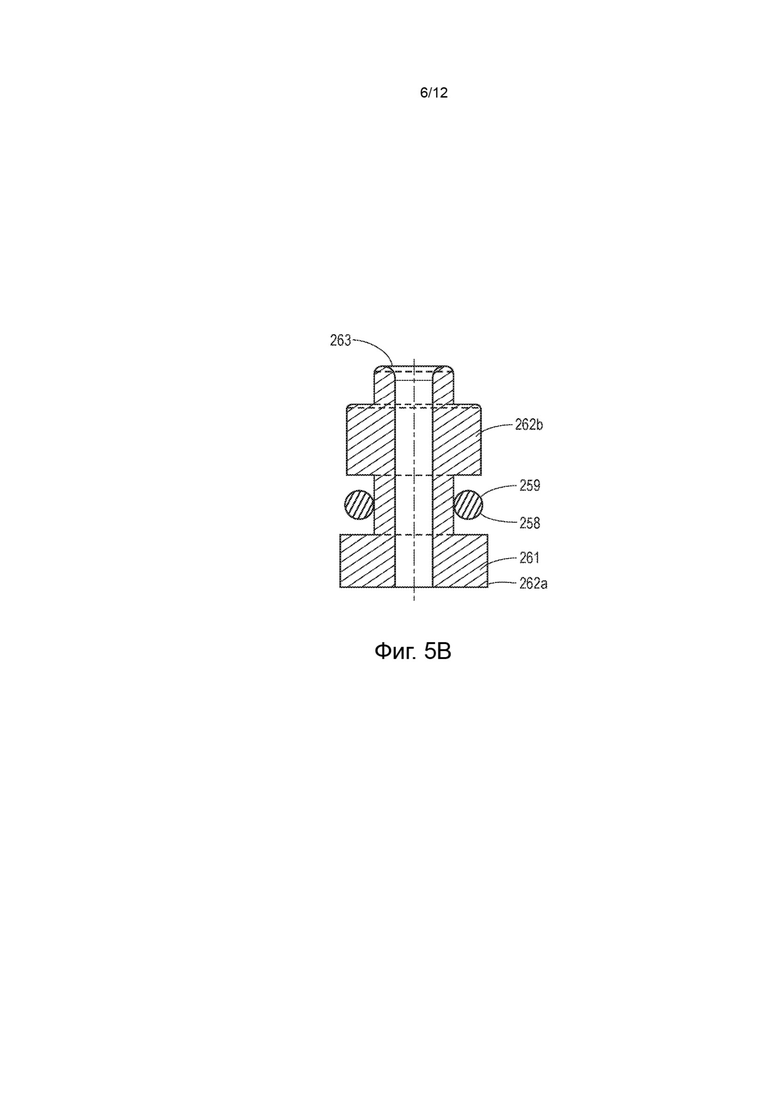
Фиг. 5В представляет собой изображение в поперечном разрезе седла питающего штуцера типового преобразователя, выполненного в соответствии с принципами изобретения по данному описанию.
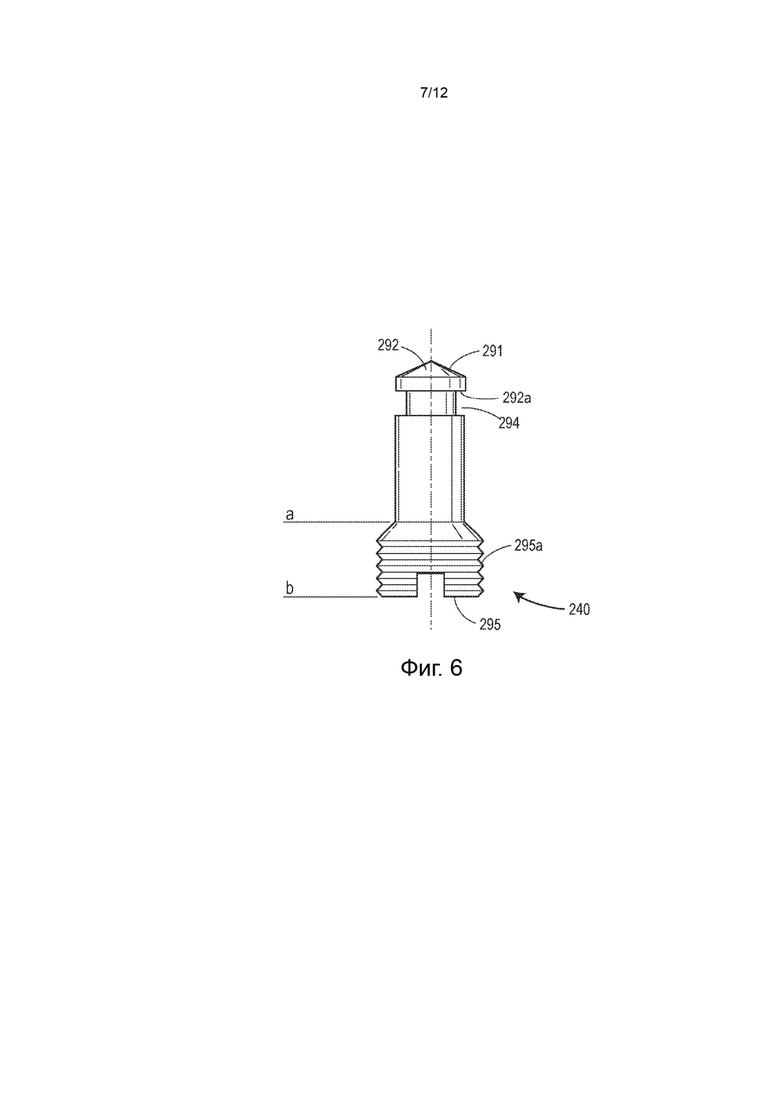
Фиг. 6 представляет собой изображение в поперечном разрезе винта регулировки возвратного усилия типового преобразователя, выполненного в соответствии с принципами изобретения по данному описанию.
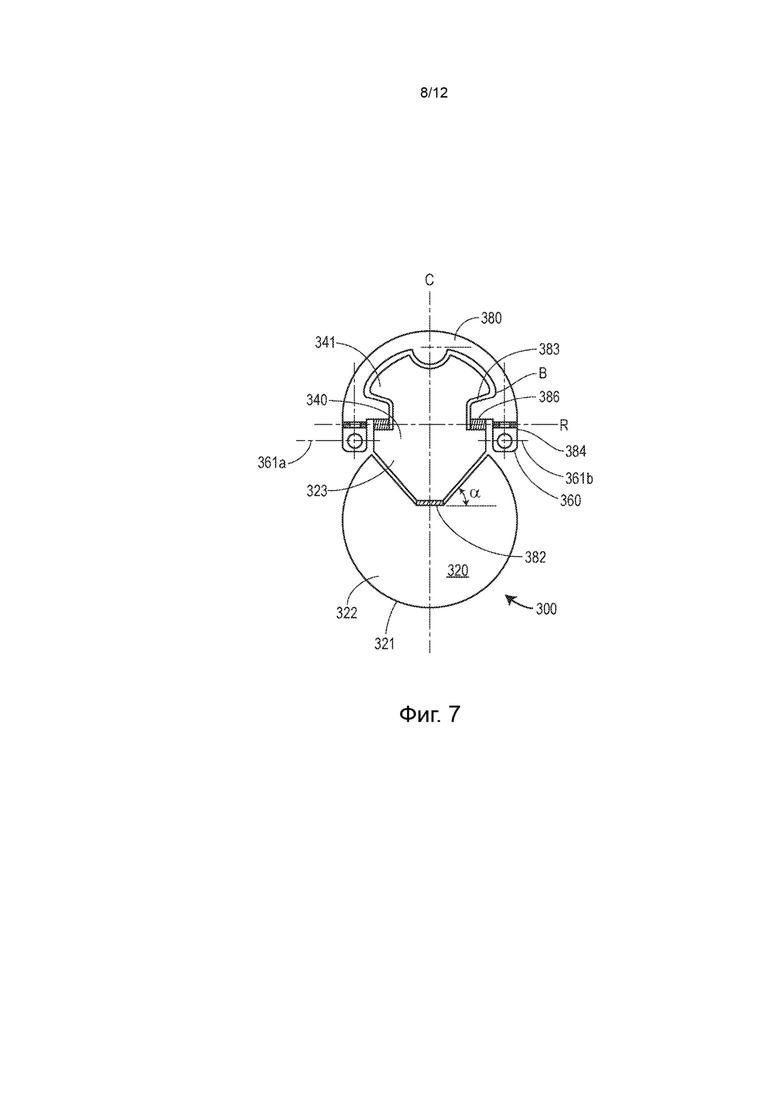
Фиг. 7 представляет собой изображение горизонтальной проекции якоря типового преобразователя, выполненного в соответствии с принципами изобретения по данному описанию.
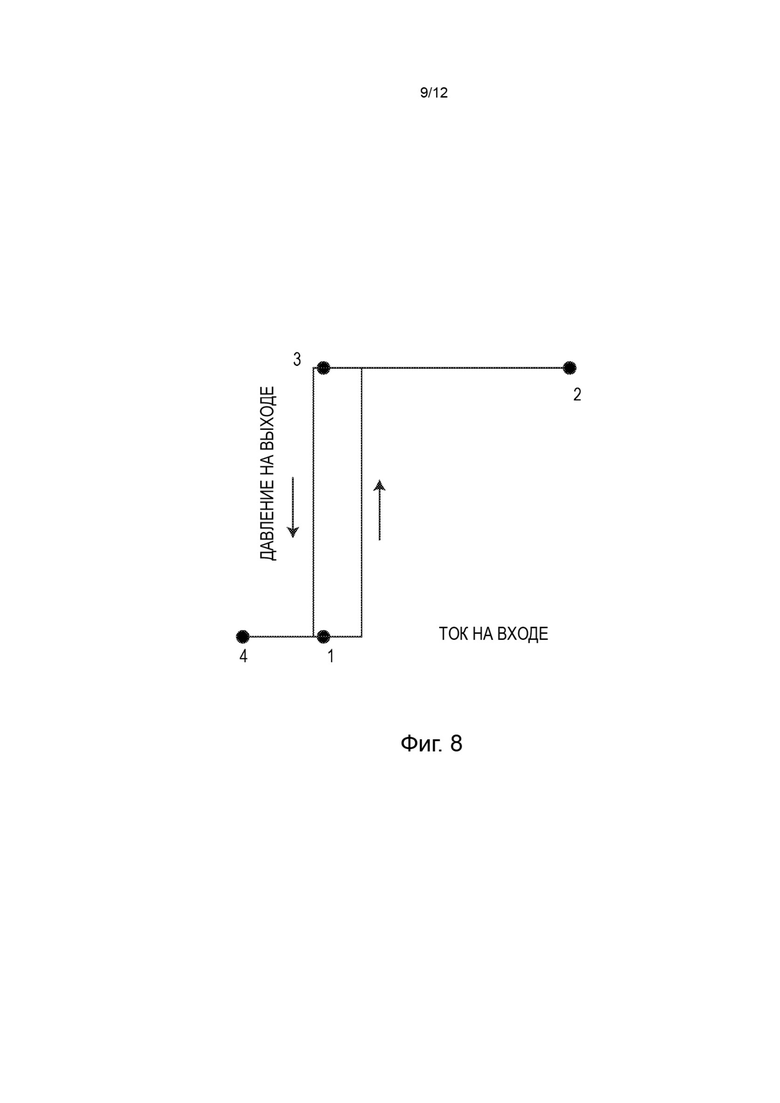
Фиг. 8 представляет собой изображение диаграммы состояний рабочего процесса типового преобразователя, выполненного в соответствии с принципами изобретения по данному описанию.
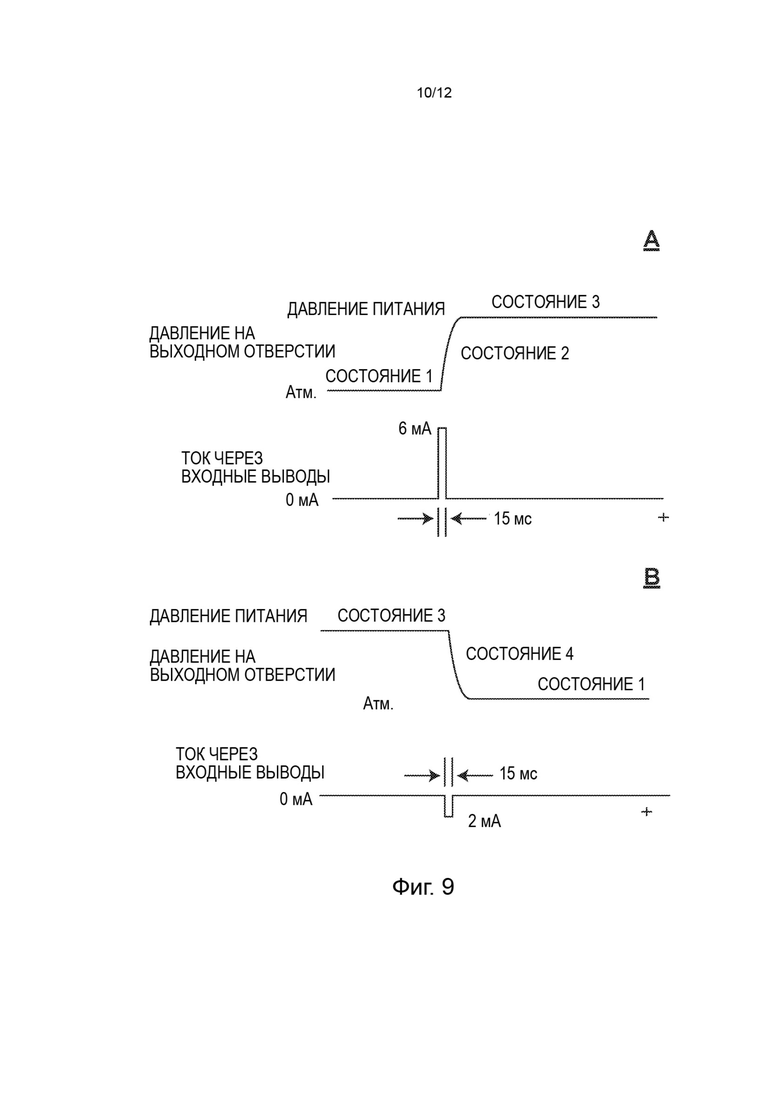
Фиг. 9 представляет собой изображение схемы активации типового преобразователя, выполненного в соответствии с принципами изобретения по данному описанию.
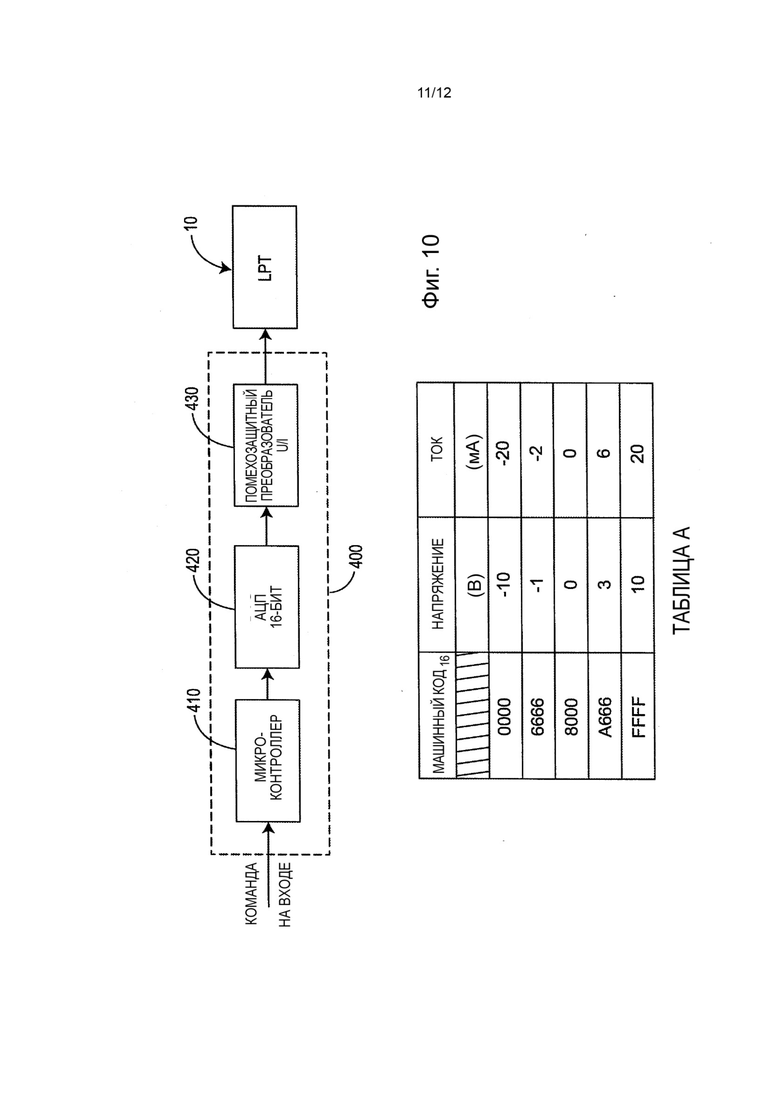
Фиг. 10 представляет собой схематическое изображение модуля управления, управляющего типовым преобразователем, выполненным в соответствии с принципами изобретения по данному описанию.
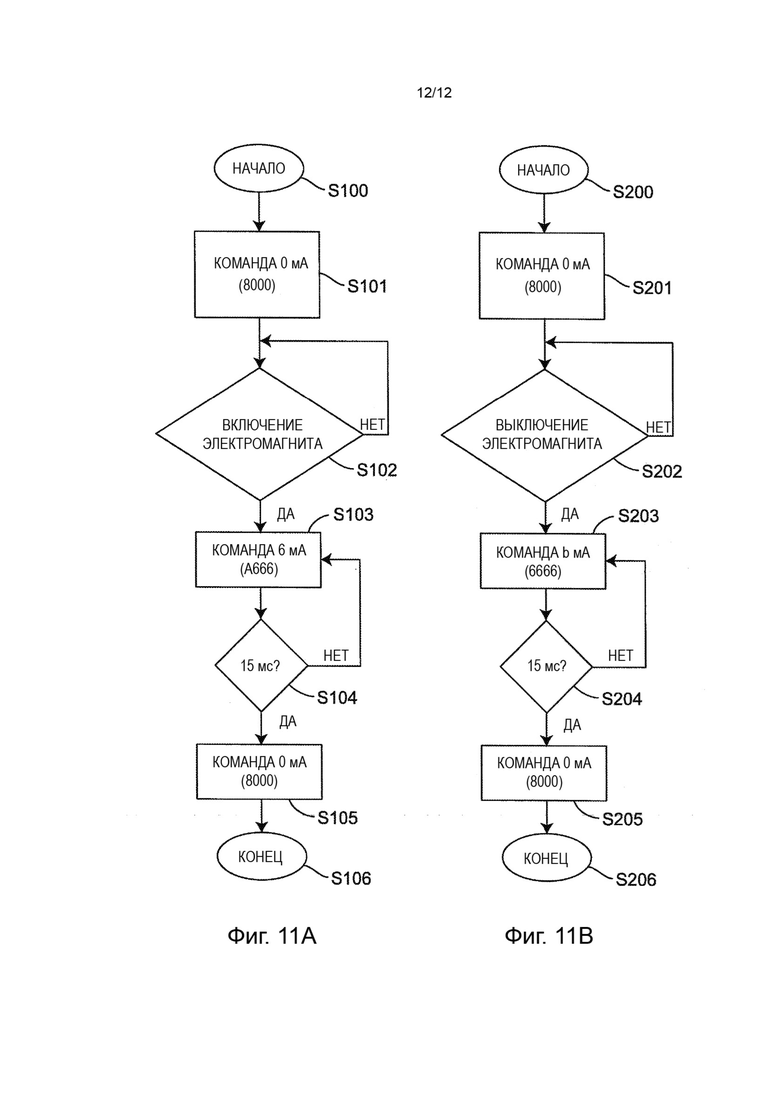
Фиг. 11А и 11В представляют собой изображения структурных диаграмм работы логических схем модуля управления типового преобразователя, выполненного в соответствии с принципами изобретения по данному описанию.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В целях лучшего понимания принципов изобретения по данному описанию далее рассматривается типовой вариант реализации изобретения и его модификации, представленные на графических материалах, с использованием конкретных формулировок для их описания. В то же время следует понимать, что тем самым не предполагается никакое ограничение объема изобретения, и что для специалиста в области техники по данному изобретению в объем изобретения включены предполагаемые модификации и дополнительные изменения представленного устройства, а также дополнительные условия применения представленных принципов изобретения.
Электропневматические портативные контрольно-измерительных приборы предусмотрены для преобразования электрического сигнала в величину волюметрического потока или выходного давления с образованием связи между независимым электрическим сигналом на выполнение команды с зависимым пневматическим сигналом давления через преобразователь давления. В связи с этим предлагается предварительная пневматическая ступень, а именно преобразователь, а конкретнее, фиксирующий пневматический преобразователь (LPT, Latching Pneumatic Transducer), для соединения с источником давления текучей среды, содержащий механизм для установки пневматического сигнала на выходе посредством электрического входного сигнала. Пневматический сигнал на выходе (то есть давление текучей среды) типового LPT перед подачей в рабочую камеру исполнительного механизма может подаваться на основную пневматическую ступень, а именно на пневматический усилитель (например, реле или золотниковый распределитель). Согласно типовому LPT механизм преобразователя выполнен с возможностью генерирования фиксирующего непостоянного пневматического выходного сигнала на основе единственного электрического входного сигнала, что соответствует его работе в качестве электропневматического переключающего клапана.
Как показано на фиг. 1, 2, 3 и 4, фиксирующий пневматический преобразователь (LPT) 10 содержит узел 100 верхнего модуля и узел 200 нижнего модуля. Узел верхнего модуля содержит верхний модуль или корпус 110, катушку 130, возвратную пружину 150 и якорь 300, включая крепежные элементы 310 якоря с образованием электромагнитного контура типового LPT 10. Верхний модуль 110 предпочтительно представляет собой прямоугольный параллелепипед, содержащий кольцевое углубление 111 катушки, сформированное из первой цилиндрической полости 112, имеющей концентрический цилиндрический сердечник 114, выполненный с возможностью размещения катушки 130. Первый дистальный конец 120 верхнего модуля 110 содержит отверстие 121 для подвода электропитания с возможностью размещения пары электрических выводов (не показаны) катушки 130. Верхний модуль 110 дополнительно содержит вторую цилиндрическую полость 122, образующую углубление пружины с возможностью размещения возвратной пружины 150. Приподнятый выступ 151 для монтажа якоря предоставляет монтажную поверхность для якоря 300, содержащего кольцевой ограничитель хода 152, который ограничивает углубление 111 кольцевой катушки. Уплотнитель 135 катушки может быть размещен непосредственно в соприкосновении с первым концом 138 катушки 130 с образованием герметизирующего уплотнения для текучей среды, для предотвращения контакта питающей текучей среды с катушкой 130. Ряд отверстий 139 a-d для крепежных элементов расположен в углах верхнего модуля 110 для установки крепежных элементов 140 a-d, соединяющих узел 100 верхнего модуля с узлом 200 нижнего модуля.
В качестве примера предпочтительные значения длины, ширины и высоты верхнего модуля 110 составляют 1,440 дюйма, 1,060 дюйма и 0,385 дюйма соответственно, причем верхний модуль 110 предпочтительно изготовлен из углеродной стали UNS G10100 с антикоррозионным пассивированием поверхности, например химическим никелированием от компании Atotech USA (Рок-Хилл, Южная Каролина, США) с толщиной слоя от 4 микрон до 6 микрон, и предпочтительно 5 микрон. Кроме того, верхний блок 110 может быть изготовлен предпочтительно с использованием известных технологий обработки из прутковой заготовки или изготовлен с использованием технологии инжекционного формирования из металлических порошков. Кроме того, в качестве альтернативы пассивирование поверхности может представлять собой покрытие Parylene C от компании Parylene Coating Service (Кэти, Техас, США) или покрытие Ballinit® от компании Oerlikon Balzers Coating (Шаумбург, Иллинойс, США). Наружный диаметр кольцевого углубления 111 катушки предпочтительно составляет 0,555 дюйма, а внутренний диаметр, образованный цилиндрическим сердечником 114, предпочтительно составляющий 0,291 дюйма, расположен на расстоянии 0,913 дюйма от второго дистального конца 136 вдоль центральной оси A, причем отверстие 121 для подвода электропитания является проксимальным к кольцевому углублению 111 катушки, и при этом предпочтительно имеет диаметр 0,053 дюйма вдоль оси А и расположено на расстоянии 0,310 дюйма от первого дистального конца 120. Углубление 124 для возвратной пружины предпочтительно имеет диаметр 0,094 дюйма и глубину 0,180 дюйма, причем оно расположено на расстоянии 0,246 дюйма от второго дистального конца 136. Как показано на фиг. 3, приподнятый кольцевой ограничитель хода 152 предпочтительно представляет собой плоскую кольцевую приподнятую поверхность, имеющую внешний размер 0,625 дюйма и внутренний размер 0,555 дюйма, причем он дополнительно содержит два приподнятых выступа 151 для монтажа якоря, с возможностью совместного использования крепежных элементов с размером резьбы 0-80 для крепления якоря к верхнему модулю 110. Перечисленные в данном документе размеры для типового LPT 10 представляют собой исключительно примеры, а другие устройства, выполненные в соответствии с принципами изобретения по данному описанию, могут быть изготовлены с различными размерами и иметь различные соотношения размеров.
Как подробно рассматривается ниже, причиной движущей силы, вызывающей перемещение якоря во время работы типового LPT 10, является притяжение и отталкивание, вызванные электромагнитом, сформированным внутри катушки 130 верхнего модуля 110. Катушка 130 типового LPT 10 предпочтительно изготовлена с использованием склеивания в струе горячего воздуха и не имеет каркаса, предпочтительно имеет длину 0,239 дюйма, внешний диаметр 0,625 дюйма и внутренний диаметр 0,555 дюйма. Обмоточный провод, используемый для создания катушки, предпочтительно представляет собой провод калибра 42 AWG и содержит 3100 витков с предпочтительным значением сопротивления катушки 600 Ом.
Как далее показано на фиг. 1 и 2, узел 200 нижнего модуля содержит нижний модуль или корпус 210, питающий штуцер 220 и регулировочный винт 240 возвратной пружины. Нижний модуль 210 предпочтительно представляет собой прямоугольный параллелепипед, содержащий углубление, образующее камеру 211 с формой «гоночной трассы» или плоского овала, ограниченную углублением 212 для уплотнителя камеры в форме прямоугольника с закругленными краями, образованным на в целом плоской поверхности внутренней грани 213 нижнего модуля 210. Плоскоовальный уплотнитель 214, в том числе кольцевой уплотнитель, может быть размещен в углублении 212 для плоскоовального уплотнителя камеры для предотвращения потери питающей текучей среды между верхним модулем 100 и нижним модулем 200. В нижнем модуле 200 дополнительно образованы внутренние рукава или проходные каналы для текучей среды для сообщения по текучей среде внутри типового LPT 10, в результате чего образуется пневматический контур типового LPT 10.
Как показано на фиг. 2 и 4, внутренние рукава в нижнем модуле 210 выполнены с возможностью установки соединения (не показано) для давления питания, питающего штуцера 220 и регулировочного винта 240 возвратной пружины. Конкретнее, питающее отверстие 215 выполнено с возможностью установки соединителя посредством резьбы или через торцевое уплотнение для соединения типового LPT 10 с источником давления питания (не показан), в том числе питательным воздухом для инструментального средства технологической установки в диапазоне значений давления от примерно 20 фунт/кв. дюйм изб. давления до 150 фунт/кв. дюйм изб. давления, и предпочтительно 20 фунт/кв. дюйм изб. давления. Питающее отверстие 215 соединено с внутренним каналом 216 питающего отверстия, включенного внутрь питающего штуцера 220. Гнездо 221 питающего штуцера выполнено с возможностью установки резьбового соединения с питающим штуцером 220. Нижний модуль 210 дополнительно содержит выхлопное отверстие 235 (фиг. 1), расположенное прилегающим к питающему отверстию 215. Выхлопное отверстие 235 соединено с внутренним каналом 236 выхлопного отверстия, сообщающимся по текучей среде с плунжером 260 клапана, расположенным внутри питающего штуцера 220. Нижний модуль 210 также содержит выходное отверстие 245, расположенное в поперечном направлении от питающего отверстия 215 и сообщающееся по текучей среде с питающим отверстием 215 и выхлопным отверстием 235 с помощью плоскоовальной камеры 211 через внутренний канал 246 выходного отверстия и выходное отверстие 247 штуцера.
Предпочтительная длина и ширина нижнего модуля составляют 1,440 дюйма и 1,060 дюйма соответственно, а высота или толщина составляет 0,440 дюйма, причем нежний модуль 210 предпочтительно изготовлен из углеродной стали UNS G10100 с антикоррозионным пассивированием поверхности, например химическим никелированием от компании Atotech USA (Рок-Хилл, Южная Каролина, США) с толщиной слоя от 4 микрон до 6 микрон, и предпочтительно 5 микрон. Кроме того, нижний модуль 210 может быть изготовлен предпочтительно с использованием известных технологий обработки из прутковой заготовки или изготовлен с использованием технологии инжекционного формирования из металлических порошков. Кроме того, в качестве альтернативы пассивирование поверхности может представлять собой покрытие Parylene C от компании Parylene Coating Service (Кэти, Техас, США) или покрытие Ballinit® от компании Oerlikon Balzers Coating (Шаумбург, Иллинойс, США). Плоскоовальная камера 211 и плоскоовальное углубление 212 для уплотнителя сформированы путем обработки трех концентрических эллипсов 217 a-c на внутренней грани 203, имеющих радиусы 0,375 дюйма, 0,425 дюйма и 0,475 дюйма на осевой линии A, с образованием глубины предпочтительно 0,045 дюйма и 0,028 дюйма соответственно для плоскоовальной камеры 211 и плоскоовального углубления 212. Ряд отверстий 141 a-d для крепежных элементов расположен в углах нижнего модуля для установки крепежных элементов, соединяющих узел 100 верхнего модуля с узлом 200 нижнего модуля. Гнездо 221 питающего штуцера имеет ступенчатую цилиндрическую конструкцию, которая предпочтительно имеет диаметр 0,114 дюйма для глубины 0,095 дюйма на участке а; диаметр 0,134 дюйма для глубины 0,300 дюйма на участке b; диаметр 0,142 дюйма для глубины 0,157 дюйма на участке c. Кроме того, предпочтительно имеется фаска в 60 градусов между участками a и b и участками b и c и фаска в 90 градусов на конце гнезда 221 питающего отверстия на конце 232 разъема участка c.
Продолжая со ссылкой на фиг. 5A, первый дистальный конец 250 питающего штуцера 220 заканчивается в поверхности 251, имеющей внутренний канал 252 плунжера, оканчивающийся отверстием 253, которое сообщается по текучей среде с поперечным внутренним каналом 247 штуцера 220. Верхний и нижний уплотнители 270 и 271 штуцера (фиг. 1) могут быть размещены в верхнем и нижнем углублении 272 и 273 для уплотнителя соответственно для создания герметизирующего уплотнения и направления питающей текучей среды из внутреннего канала 216 питающего отверстия и внутреннего канала 236 выхлопного отверстия, соответственно, через поперечный внутренний канал 247 во внутренний канал 252 штуцера. Второй дистальный конец 256 может содержать резьбовой участок 257a для сцепления с соответствующим резьбовым участком 257b гнезда 221 питающего штуцера. Питающий штуцер 220 используется для направления питающей текучей среды от источника питания в плоскоовальную камеру 211 в типовом LPT 10 и наружу через выходное отверстие 245, и используется для направления питающей текучей среды из плоскоовальной камеры 211 в выхлопное отверстие 235, как подробнее описано ниже. На фиг. 5В изображено седло 261 питающего штуцера, запрессованное в питающем штуцере 252, чтобы обеспечить уплотняющую поверхность 263 для плунжера 260 клапана и содержащее уплотняющую манжету 259, содержащую уплотнительное кольцо 258.
Как показано на фиг. 2 и 6, узел 200 нижнего модуля также содержит гнездо 290 регулировочного винта возвратной пружины с возможностью резьбового соединения с регулировочным винтом 240 возвратной пружины. Первый дистальный конец 291 регулировочного винта 240 возвратной пружины заканчивается на конической поверхности 292. Кроме того, верхний уплотнитель 293 регулировочного винта может быть расположен в углублении 294 для верхнего уплотнителя регулировочного винта для предотвращения потери текучей среды из плоскоовальной камеры 211. Второй дистальный конец 295 может содержать резьбовой участок 295a для сцепления с соответствующим резьбовым участком 296a гнезда 290 регулировочного винта.
Питающий штуцер 220 имеет ступенчатую цилиндрическую конструкцию, которая предпочтительно имеет диаметр 0,130 дюйма для длины 0,179 дюйма на первом участке а; диаметр 0,130 дюйма для длины 0,120 дюйма на втором участке b; диаметр 0,142 дюйма для длины 0,081 дюйма на третьем участке c, причем участок c предпочтительно имеет резьбу M4x0,35 длиной 0,081 дюйма. Питающий штуцер 220 может быть предпочтительно изготовлен из углеродной стали UNS G10100 с антикоррозионным пассивированием поверхности, например химическим никелированием от компании Atotech USA (Рок-Хилл, Южная Каролина, США) с толщиной слоя от 4 микрон до 6 микрон, и предпочтительно 5 микрон. Кроме того, питающий штуцер 220 может быть изготовлен предпочтительно с использованием известных технологий обработки из прутковой заготовки или изготовлен с использованием технологии инжекционного формирования из металлических порошков. Кроме того, в качестве альтернативы пассивирование поверхности может представлять собой покрытие Parylene C от компании Parylene Coating Service (Кэти, Техас, США) или покрытие Ballinit® от компании Oerlikon Balzers Coating (Шаумбург, Иллинойс, США), имеющее слой, предпочтительно, толщиной 5 мкм. Существует внутренняя камера 262 для плунжера, размером предпочтительно 0,071 дюйма в диаметре и 0,133 дюйма в длину, примыкающая к дистальному концу 250 штуцера 220. Углубление 272 для верхнего уплотнителя штуцера предпочтительно имеет высоту 0,039 дюйма и внутренний диаметр 0,075 дюйма, при этом оно содержит поверхность 272а верхнего уплотнителя штуцера, расположенную предпочтительно на расстоянии 0,032 дюйма от дистального конца 250. Углубление 273 для нижнего уплотнителя штуцера предпочтительно имеет высоту 0,039 дюйма и внутренний диаметр 0,095 дюйма, при этом оно содержит поверхность 274а нижнего уплотнителя штуцера, расположенную предпочтительно на расстоянии 0,190 дюйма от дистального конца 250 штуцера 220. Внутренний канал 216 штуцера предпочтительно составляет 0,024 дюйма в диаметре и проходит вдоль продольной оси В штуцера 220 с пересечением с поперечным внутренним каналом 247 штуцера, имеющим предпочтительный диаметр канала 0,030 дюйма и расположенным на расстоянии 0,107 дюйма от дистального конца 252. Кроме того, штуцер 220 содержит внутреннюю камеру 262 для плунжера, образованную во внутреннем канале 252 для плунжера, имеющую питающее седло 283 и выхлопное седло 282, выполненное с возможностью размещения плунжера 260 клапана, имеющего питающую поверхность 265, выхлопную поверхность 267 и кончик 266 плунжера.
Седло питающего штуцера имеет ступенчатую цилиндрическую конфигурацию, имеющую длину предпочтительно 0,118 дюйма. Уплотнительное кольцо манжеты 259 предпочтительно имеет высоту 0,031 дюйма и внутренний диаметр 0,042 дюйма. Первая цилиндрическая область 262а предпочтительно имеет высоту 0,028 дюйма, а вторая цилиндрическая область 262b предпочтительно имеет высоту 0,039 дюйма. Уплотняющая поверхность 263 предпочтительно имеет высоту 0,020 дюйма над второй цилиндрической областью 262b и имеет радиус 0,008 дюйма.
Предпочтительные размеры регулировочного винта 240 возвратного усилия следующие. Регулировочный винт 240 возвратного усилия имеет ступенчатую цилиндрическую конструкцию, которая предпочтительно имеет диаметр 0,104 дюйма для длины 0,238 дюйма на участке а; диаметр 0,142 дюйма для длины 0,122 дюйма на участке b; причем участок b предпочтительно имеет резьбу M4x0,35 длиной 0,081 дюйма. Кроме того, на дистальном конце 291 предпочтительно имеется фаска 30 градусов, причем углубление 294 для верхнего уплотнителя предпочтительно имеет высоту 0,039 дюйма и внутренний диаметр 0,075 дюйма, при этом оно содержит поверхность 292а верхнего уплотнителя штуцера, расположенную предпочтительно на расстоянии 0,051 дюйма от дистального конца 291.
Предпочтительные размеры плунжера 260 клапана следующие. Плунжер клапана имеет в целом цилиндрическую конфигурацию, которая предпочтительно имеет 0,059 дюйма в диаметре для длины 0,098 дюйма. Кроме того, предпочтительно имеется конус на 45 градусов на конической питающей поверхности 265 и в виде усеченно-конической выхлопной поверхности 267 с верхним уплотнением, включая контактный кончик 266, высота которого предпочтительно составляет 0,035 дюйма, и диаметр 0,020 дюйма, включая радиусный кончик 268, предпочтительно радиусом 0,030 дюйма на дистальном конце 291.
Как показано на фиг. 7, якорь 300 типового LPT 10 изготовлен из цельного неразрезного металлического листа, с интегрированными тяговой частью 320, воздействующей частью 340, установочной частью 360, частью 380 стопорной пружинной шайбы, разгрузочным шарниром 382, возвратным шарниром 384, перекрывающим шарниром 386. На горизонтальной проекции по фиг. 7 якорь 300 предпочтительно имеет в целом плоскоовальную форму и предпочтительно содержит конструкционный рельеф (в поперечном сечении) для образования поворотных элементов или шарниров, а также вышеперечисленных частей. Иными словами, тяговая часть 320, содержащая участок 322 в целом округлой формы, сформирована на первом конце 321 якоря 300, содержащего область 323, отделенную от округлого участка 322 в виде шестиугольника неправильной формы. Область 323 шарнирно соединена с тяговой частью 320 с помощью разгрузочного шарнира 382. Как дополнительно показано на фиг. 7, воздействующая часть 340 в целом сформирована из области 323, соединенной с участком 341 с формой замочной скважины, содержащим конструкционный рельеф для образования возвратного шарнира 384 и перекрывающего шарнира 386, которые функционально соединяют воздействующую часть 340 с частью 380 стопорной пружинной шайбы, подробнее описанной ниже. Часть 380 стопорной пружинной шайбы создает основное возвратное усилие якоря 300, необходимое для создания бистабильного или фиксирующего действия типового LPT 10. Иными словами, якорь 300 содержит углубления, которые образуют горизонтальную ось вращения R якоря 300. Изгиб, создаваемый выемками (например, поворотный элемент), образует угловую пружину, которая работает совместно с возвратной пружиной 150 на образование рабочего возвратного усилия, как подробнее описано ниже.
Как далее показано на фиг. 7, тяговая часть 320 прикреплена к воздействующей части 340 с помощью разгрузочного шарнира 382. Во время работы разгрузочный шарнир 382 вырабатывает вектор силы, создаваемой в тяговой части 320 за счет приложения постоянного тока к электрическим выводам катушки 130. Магнитное поле, создаваемое за счет подачи постоянного тока в катушку 130, образует электромагнит вокруг цилиндрического сердечника 114. Электромагнит формирует соответствующую силу магнитного поля, а следовательно, соответствующий момент силы на оси вращения R, притягивающий тяговую часть 320 якоря 300 к цилиндрическому сердечнику 114 в соприкосновение с кольцевым ограничителем 152 хода. После того, как тяговая часть 320 якоря 300 соприкасается с кольцевым ограничителем 152 хода магнитный контур является «закрытым» и остаточный магнитный поток или остаточная намагниченность присутствует в магнитном контуре, удерживая якорь 300 притянутым к цилиндрическому сердечнику 114; даже если ток больше не подается на катушку 130.
В частности, этот момент срабатывания, создаваемый постоянным током превосходит момент возвратного усилия, создаваемый частью 380 пружинной стопорной шайбы, что вызывает поворот тяговой части 320 и воздействующей части 340 вокруг оси вращения R по направлению к катушке 130 в соприкосновение с кольцевым ограничителем 152 хода. Тяговая часть 320 и воздействующая часть 340 продолжают оставаться в соприкосновении с кольцевым ограничителем 152 хода (то есть фиксируют положение якоря) если момент срабатывания имеет большую величину, чем момент возвратного усилия, пытающийся оторвать тяговую часть 320 от катушки 130 и кольцевого ограничителя 152 хода.
В альтернативном варианте, применение противоположной полярности и значения тока катушки приводит к уменьшению тяговой силы магнитного поля и соответствующего магнитного момента до значений более низких, чем величина момента возвратного усилия, приложенного к тяговой части 320 и воздействующей части 340, при этом тяговая часть 320 высвобождается из кольцевого ограничителя 152 хода и воздействующая часть 340 с тяговой частью 320 переходят в положение на расстоянии от катушки 130. Такое переключающее движение якоря 300 устанавливает поочередный контакт якоря с контактным кончиком 266 с изменением потока через типовой LPT 10. Помимо выполнения соединения между тяговой частью 320 и воздействующей частью 340 для передачи усилия, разгрузочный шарнир 382 также служит средством, позволяющим тяговой части 320 выравниваться относительно лицевой стороны катушки в случае присутствия небольших ошибок выравнивания между лицевой стороной 132 катушки и тяговой частью 320 якоря. Такие ошибки могут возникать в результате ошибок в допуске на обработку в полуовальной камере 211 или в результате нежелательного искажения или деформации якоря 300. Воздействующая часть 340 представляет собой жесткую область, подвешенную на шарнире 386 воздействующей части, и является частью якоря 300, которая во время работы выполняет смещение с образованием поочередного контакта с контактным кончиком 266. Шарнир 386 воздействующей части ограничивает угловое перемещение воздействующей части 340 вокруг оси вращения R.
В качестве регулировочного средства достижения единого рабочего порогового значения от устройства к устройству предлагается регулируемый момент возвратного усилия с использованием части 380 пружинной стопорной шайбы. Этот момент возвратного усилия прикладывается к воздействующей части на оси вращения R и работает в противовес моменту магнитного поля с осуществлением влияния на отвод тяговой части 320 от катушки 130 и кольцевого ограничителя 152 хода. Регулировочный винт 240 возвратного усилия выполняет статическую регулировку, которая устанавливает переключение или бистабильную работу якоря при заданных уровнях тока катушки. Момент возвратного усилия создается частью 380 пружинной стопорной шайбы, регулировочным винтом 240 возвратного усилия, возвратной пружиной 150, возвратным шарниром 384 и шарниром 386 воздействующей части. Для установки величины момента возвратного усилия на требуемом уровне, регулировочный винт 240 возвратной пружины поворачивают до положения, при котором происходит операция переключения якоря 300 при перемещении якоря 300 между рабочими положениями тока катушки. Вращение регулировочного винта 240 возвратной пружины вызывает смещение конца регулировочного винта 240 возвратной пружины, что приводит к изменению углового смещения части 380 пружинной стопорной шайбы, при котором часть 380 пружинной стопорной шайбы поворачивается вокруг оси вращения R образованной описанными выше четырьмя шарнирными частями.
Результирующее изменение угла поворота части 380 пружинной стопорной шайбы вызывает соответствующее изменение угла возвратного усилия, сообщаемого шарнирам 386 воздействующей части. Этот угол соответствует моменту поджатия или крутящему моменту, приложенному к воздействующей части 340 вокруг оси вращения R. Вследствие этого регулировка регулировочного винта 240 возвратной пружины приводит к регулировке момента возвратного усилия, приложенного к воздействующей части 320 и предоставляет средство «обнуления» или балансировки воздействующей части 320 для выполнения требуемого действия. Возвратная преднагруженная пружина 150 используется в качестве нагрузки на вторую поверхность якоря 300, достаточной для удержания части 380 пружинной стопорной шайбы в постоянном соприкосновении с дистальным концом 291 регулировочного винта 240 возвратной пружины. В альтернативном варианте реализации типового LPT 10 возвратная преднагруженная пружина 150 может быть исключена из конструкции, поскольку поджимающая нагрузка, сообщаемая частью 380 пружинной стопорной шайбы, может быть достаточной для поддержания контакта с концом регулировочного винта 240 возвратной пружины. Кроме того, регулировочный винт 240 возвратной пружины может быть в результате исключен из типового LPT 10 и заменен фиксированным выступом с регулируемой высотой для получения постоянной величины угла для пружинной стопорной шайбы.
Якорь 300 может быть изготовлен из материала, обладающего свойствами магнитной проницаемости, имеющего толщину предпочтительно 0,020 дюйма, и рельеф, образующий возвратный шарнир 384, перекрывающий шарнир 386 и разгрузочный шарнир 382, предпочтительно имеющие толщину 0,0063 дюйма. Якорь 300 может быть предпочтительно изготовлен из магнитного металла, например, углеродной стали UNS G10100 с антикоррозионным пассивированием поверхности, например химическим никелированием от компании Atotech USA (Рок-Хилл, Южная Каролина, США) с толщиной слоя от 4 микрон до 6 микрон, и предпочтительно 5 микрон. Кроме того, в качестве альтернативы пассивирование поверхности может представлять собой покрытие Parylene C от компании Parylene Coating Service (Кэти, Техас, США) или покрытие Ballinit® от компании Oerlikon Balzers Coating (Шаумбург, Иллинойс, США). При выборе соответствующих материалов для изготовления якоря 300, узла 100 верхнего модуля и узла 200 нижнего модуля типовой LPT может работать при температуре от +85°С до -60°С за счет согласования величин температурного коэффициента линейного расширения (например, предпочтительного значения температурного коэффициента линейного расширения 12,2 мкм/м⋅°С).
Тяговая часть 320 предпочтительно имеет круглое поперечное сечение с радиусом 0,344 дюйма, содержащее сектор 322 с углом 84 градуса, α, отделенный расстоянием 0,018 дюйма. Часть 380 стопорной пружинной шайбы предпочтительно имеет внешний радиус 0,344 дюйма и внутренний 0,284 дюйма соответственно. Участок язычка части 380 стопорной пружинной шайбы имеет радиус 0,064 дюйма, расположенный вдоль центральной оси С якоря 300 на окружности радиуса предпочтительно 0,280 дюймов. Внешние периметры воздействующей части 340 соответствующим образом совпадают с внутренним периметром части 380 стопорной пружинной шайбы, и предпочтительно находятся на разделительном расстоянии 0,018 дюйма от противолежащей части 380 стопорной пружинной шайбы, при этом установочная часть 360 имеет сквозные отверстия, равноудаленные на расстояние 0,061 дюйма от центральной оси C и разнесенные на 0,584 дюйма. Угловой участок 383 части 380 стопорной пружинной шайбы предпочтительно составляет 18 градусов, β. Размер рельефа, образующего возвратный шарнир 384, предпочтительно составляет 0,030 дюйма на 0,020 дюйма, причем соответствующий размер разгрузочного шарнира 382 предпочтительно составляет 0,100 дюйма на 0,020 дюйма. Рельефы, образующие перекрывающий шарнир 386, предпочтительно имеют размер 0,060 дюйма на 0,035 дюйма. Кроме того, два отверстия 361 a-b в якоре 300, представленном на фиг. 7, образуют встроенную монтажную поверхность якоря 300. Во время сборки крепежные элементы 310 якоря проходят через отверстия для крепления якоря и образуют резьбовое соединение с нижним модулем 200.
Последующее рабочее описание выполнено применительно к ранее описанному типовому LPT 10, фиг. 1-4. Как показано на фиг. 8 и 9, типовой LPT имеет четыре (4) параметра, которые определяют его рабочие состояния: состояние 1, состояние 2, состояние 3 и состояние 4. Как подробнее объясняется ниже, в типовом LPT 10 состояние 1 и состояние 3 являются состояниями покоя (то есть неактивными), а состояние 2 и состояние 4 являются не состояниями покоя (то есть активными). В состоянии 1 входной сигнал через электрические выводы равен нулю (0) мА (то есть нулевой мощности), и якорь 300 типового LPT 10 слегка поворачивается против часовой стрелки вокруг оси вращения R, как показано на фиг. 2, так что между плоской поверхностью 113 катушки 130 и якорем 300 образуется небольшой воздушный зазор (то есть якорь не прилегает к плоской поверхности 113). В раскрытом примере воздушный зазор составляет примерно 0,0055 дюйма. Вращение против часовой стрелки вызывается моментом, создаваемым силой сжатия возвратной пружины, причем зазор ограничен настройкой питающего штуцера 220, который служит в качестве ограничителя хода дополнительного вращения против часовой стрелки якоря 300. В состоянии 1 контактный кончик 266 питающего штуцера 220 находится в контакте с воздействующей частью 340 якоря. Усилие от якоря приводит воздействующую часть 340 в принудительный контакт с контактным кончиком 266, достаточным для того, чтобы подвести питающую поверхность 283 в герметичный контакт с питающим седлом 265, а выхлопную поверхность 282 в разгерметизированный контакт с выхлопным седлом 267. Давление на выходном отверстии 245 типового LPT 10 передается по текучей среде к выхлопному отверстию 235 в состоянии 1 и, в результате снижается до величины давления выхлопа, например до атмосферного давления, что приводит к неподвижному потоку текучей среды, как указано стрелками потока на фиг. 2 и 4, через типовой LPT 10, величина которого равна нулю (0) или по сути равна нулю (0). В этом рабочем состоянии 1 давление на выходном отверстии 245 обязательно находится на уровне давления выхлопа и остается фиксированным на такой величине вследствие фиксирующего усилия, создаваемого частью 380 стопорной пружинной шайбы, до момента подачи ненулевого электрического входного сигнала на электрические выводы. Потребление электроэнергии в типовом LPT 10 в состоянии 1 равно нулю (0) мВт или условию «нулевой мощности», поскольку электрическая мощность не подается. Иными словами, по сравнению с непрерывными пропорциональными преобразователями, типовой LPT 10 модулирует работу питающего штуцера 220 противонаправленным или чередующимся образом, что по сути устраняет выпускной поток в состоянии покоя (то есть постоянный вывод питающего воздуха) через типовой LPT 10.
Для осуществления изменения выходного давления типовой LPT 10 должен перейти из состояния 1 в состояние 2. Иными словами, состояние 2 типового LPT 10 является временным переходным состоянием и создается путем подачи ненулевого постоянного тока или ненулевой мощности на электрические выводы катушки 130, тем самым включая или приводя в действие типовой LPT 10. Во время подачи на катушку 130 постоянного тока, например величиной +6 миллиампер (мА), создается магнитное поле, намагничивающее сердечник 114 и втулку типового LPT 10, образованную кольцевым ограничителем 152 хода, который вырабатывает усилие намагничивания (то есть притягивающее усилие), в непосредственной близости к якорю 300. При подаче постоянного тока сила магнитного поля может стать достаточной для преодоления или превышения суммы пружинного момента якоря 300, создаваемого описанной выше частью 380 стопорной пружинной шайбы, и контактного момента питающего штуцера 220, принуждающего якорь 300 к вращению относительно оси вращения R. В представлении по фиг. 2, якорь 300 вращается по часовой стрелке. Вращение якоря будет продолжаться до тех пор, пока якорь 300 соприкасается с кольцевым ограничителем 152 хода (то есть прилегает непосредственно к плоской поверхности 113). Состояние 2 устанавливается при полностью открытом положении отверстия питающего штуцера 220 под воздействием электрической энергии, достаточной для перемещения якоря 300 в описанное выше положение, в котором выходное отверстие 245, сообщается по текучей среде с питающим отверстием 215, передавая давление питания на выходное отверстие 245 посредством перемещения плунжера 260 клапана. Таким образом, в состоянии 2 сила, создаваемая на воздействующей части 340, уменьшается на контактном кончике 266, так что сила, создаваемая давлением питания через внутренний канал 216 питающего отверстия, действующим на питающую поверхность 265, достаточна, чтобы переместить плунжер клапана от питающего седла 283, вводя в контакт выхлопную поверхность 267 с выхлопным седлом 282. Следует понимать, что перекрытие питающего штуцера 220 не является газонепроницаемым. То есть при перекрытии отверстия 252 питающего штуцера может быть небольшая или незначительная утечка между питающим и выхлопным седлами 283, 282 и якорем 300. В то же время в состоянии 2 объемный поток (то есть поток, вызванный положительным градиентом давления за счет сообщения по текучей среде между открытым питающим отверстием и закрытым выхлопным отверстием) из питающего штуцера 220 значительно превосходит незначительную утечку, тем самым приводя к увеличению величины давления текучей среды в камере и на выходном отверстии 245 до величины, по сути равной давлению питания на впускном отверстии 215, например двадцати (20) фунт/кв. дюйм изб. давления. Потребление электроэнергии в состоянии 2 не равно нулю вследствие подачи тока активации величиной 6 мА.
После подачи сигнала активации состояния 2 и результирующего переключения в новое состояние выходного давления типовой LPT 10 может быть возвращен в состояние «без мощности», эффективно фиксируя давление выходного отверстия при давлении питания. Это состояние «без мощности» определяет рабочее состояние 3. Состояние 3 типового LPT 10 использует свойства магнитных материалов узлов сердечника и втулки, а также якоря, для фиксации или удержания конечного положения активированного состояния 2. Иными словами, в состоянии 3 сила магнитного поля, создаваемая током активации, в сочетании с магнитными свойствами типового LPT 10 образуют в состоянии 3 остаточную намагниченность, принципиально необходимую для осуществления бистабильной работы устройства. В частности, сила притяжения магнитного контура преодолевает момент силы сжатия пружины части 380 стопорной пружинной шайбы и усилие поджатия пружины, удерживающие якорь на месте после активации состояния 2, без необходимости в дополнительной электрической мощности. Сила магнитного поля создает момент, направленный по часовой стрелке вокруг оси вращения R, который превышает момент, направленный против часовой стрелки, создаваемый пружиной совместно со всеми другими рабочими моментами, и удерживает якорь на поверхности сердечника 114 и втулки, образованной кольцевым ограничителем 152 хода. В состоянии 3 говорят, что якорь зафиксирован, поскольку для поддержания этого состояния не используется электрическая мощность. Состояние 3 поддерживает выходное давление на выходном отверстии 245 по сути на уровне давления питания. Якорь типового LPT 10, а следовательно, и выходное давление могут оставаться в заданном состоянии до тех пор, пока не будет выполнено изменение входного сигнала на электрических выводах. В состоянии 3 потребление электрической мощности равно нулю (0) или находится в состоянии «нулевой мощности».
Конечным рабочим состоянием является состояние 4, которое соответствует изменению выходного пневматического давления от величины давления питания на величины давления выхлопа (например, величины атмосферного давления). Для начала перехода из состояния 3 в состояние 4 необходимо изменить величину и «направление» постоянного тока. Это означает, что постоянный ток изменяет полярность по отношению к постоянному току, подаваемому в состоянии 2. В общем случае, когда постоянный ток, например величиной -2 мА, подается на катушку через электрические выводы, вокруг катушки создается магнитное поле, противоположное силе намагничивания состояния 2, которое преодолевает или разрушает остаточную намагниченность, установленную в состоянии 2, тем самым выполняя отключение или деактивацию типового LPT 10. Когда в электромагнитном контуре происходит подавление остаточной намагниченности, описанный выше момент сжатия пружины поворачивает якорь 300 в направлении против часовой стрелки относительно оси вращения R. Якорь 300 перемещает плунжер 260 клапана в этом относительном направлении до его соприкосновения с питающим седлом 283, что как описано ранее по сути приводит к перекрытию или закрытию питающего отверстия от выходного отверстия 245. В состоянии 4 давление в выходной камере, а следовательно, и в выходном отверстии 245 быстро снижается до давления выхлопа (то есть потока, вызванного отрицательным градиентом давления, возникающим за счет сообщения по текучей среде к открытому выхлопному отверстию и закрытому питающему отверстию). В этом состоянии 4 давление на выходном отверстии в типовом LPT 10 обязательно находится на уровне давления выхлопа, а потребление электроэнергии в типовом LPT 10 в состоянии 4 не равно нулю вследствие величины тока деактивации -2 мА. Сразу после активации состояния 4 типовой LPT 10 может переходить непосредственно в состояние 1 при завершении блокировки и «удаления» сигнала деактивации или его нулевом значении (0) мА, что по сути аналогично сигналу активации в состоянии 1 типового LPT 10.
Сигнал активации и модуль управления, требуемые типовым LPT 10, показаны на фиг. 9 и фиг. 10. Типовой LPT 10 хорошо подходит для приложений, требующих минимального энергопотребления. Бистабильный, фиксирующий характер конструкции значительно снижает энергопотребление, поскольку состояние 1 и состояние 3 не требуют применения какой-либо электрической мощности для поддержания выходного давления. Дополнительно, импульсы тока (т. е. +6 мА и -2 мА) имеют минимальную длительность во время состояния 2 и состояния 4, и даже во время активации или деактивации требования к мощности типового LPT 10 существенно снижаются по сравнению с обычными преобразователями. Как показано, длительность тока активации и деактивации предпочтительно составляет 15 миллисекунд (мс).
На фиг. 9 дополнительно проиллюстрирована кривая выходного давления во время переходных состояний типового LPT 10. Например, иллюстрация A изображает переход из состояния 1→состояние 2→состояние 3. То есть выходное давление типового LPT 10 по существу соответствует давлению выхлопа в состоянии 1 (то есть атмосферному давлению или в состоянии с низким уровнем выходного сигнала). Сигнал активации +6 мА в течение 15 мс подается на типовой LPT. Как описано выше, типовой LPT 10 переходит из состояния 1 в состояние 2, фиксируя выходные данные типового LPT 10 для подачи давления; впоследствии сигнал активации удаляется, и типовой LPT 10 переходит в состояние 3, в котором выходное давление остается на давлении входа или питания (то есть в состоянии с высоким уровнем выходного сигнала). В качестве альтернативы, иллюстрация B изображает кривую выходного давления и входной сигнал или сигнал активации для перехода типового LPT 10 из состояния 3→состояние 4→состояние 1. То есть выходное давление типового LPT 10 на иллюстрации B фиксируется при давлении питания в состоянии 3. Как описано выше, сигнал активации -2 мА подается в течение 15 мс. Таким образом, типовой LPT 10 переходит из состояния 3 в состояние 4, фиксируя выходные данные типового LPT 10 для выхлопного давления; впоследствии сигнал активации удаляется, и типовой LPT 10 переходит в состояние 1.
Фиг. 10, 11A и 11B представляют типовой модуль управления и логические схемы для выработки сигналов управления для типового LPT 10. Далее с использованием фиг. 10 описывается модуль 400 управления. Типовой LPT 10 управляется посредством традиционных электронных устройств. Модуль 400 управления предназначен для обработки входного сигнала, поступающего из контура управления, в том числе контура управления положением, принимающего данные обратной связи по положению на обычный пневматический исполнительный механизм, соединенный с регулирующим клапаном (не показан). Как понятно специалисту в данной области техники, входной сигнал может быть получен из алгоритма сервопривода с целью управления выходным давлением типового LPT 10 для установки требуемого положения или заданной координаты, указанной сервоприводом. Типовой модуль 400 управления содержит следующие компоненты: микроконтроллер 410, цифроаналоговый преобразователь (ЦАП) 420, например 16-разрядный ЦАП, и помехозащитный преобразователь 430 напряжения в ток. Во время работы входной сигнал на выполнение команды может быть направлен в микроконтроллер 410, который модифицирует или интерпретирует команду для активации (включения) или деактивации (отключения) типового LPT 10. На основании предыдущего описания и типовых схем активации на графике A фиг. 10 представлена схема активации включения типового LPT10, а логический алгоритм выполнения показан на фиг. 11А. Иными словами, для активации типового LPT 10 микроконтроллер 410 выполняет интерпретацию входной команды. Микроконтроллер 410 вырабатывает цифровую команду для ЦАП 420, которая преобразует цифровую команду в аналоговый сигнал, представляющий такой сигнал. Аналоговый выход ЦАП 420 соединен с помехозащитным преобразователем 430 напряжения в ток, который выполняет преобразование репрезентативного сигнала напряжения в репрезентативный сигнал постоянного тока, выполняющий активацию типового LPT 10.
Например, как показано на фиг. 11А на этапе S100 по запросу сигнала на подачу команды происходит запуск подпрограммы в микроконтроллере 410. Для выработки импульса или сигнала активации для типового LPT 10 на этапе S101 микроконтроллер 410 генерирует цифровой сигнал, соответствующий 0 мА (то есть команду 800016 на графике A), который на этапе S102 поддерживает текущее состояние типового LPT 10, например, состояние 1. Для выработки сигнала активации +6 мА на этапе S102 микроконтроллер 410 генерирует цифровой сигнал, соответствующий +6 мА (то есть команду A66616 из Таблицы A), и на этапе S104 при определенных условиях поддерживает этот выходной сигнал в течение 15 мс, что активирует состояние 2 типового LPT 10. По истечении времени активации 15 мс, на этапе S105 микроконтроллер 410 генерирует цифровой сигнал, представляющий 0 мА (то есть команду 800016 из таблицы A), который на этапе S106 поддерживает текущее состояние типового LPT 10, например состояние 3.
Продолжая, как показано на фиг. 11B, для выработки импульса или сигнала деактивации для типового LPT 10 на этапе S201 микроконтроллер 410 генерирует цифровой сигнал, соответствующий 0 мА (то есть команду 800016 из таблицы A), который на этапе S202 поддерживает текущее состояние типового LPT 10, например, состояние 3. Для выработки сигнала активации -2 мА на этапе S202 микроконтроллер 410 генерирует цифровой сигнал, соответствующий -2 мА (то есть команду 666616 из Таблицы A), и на этапе S204 при определенных условиях поддерживает этот выходной сигнал в течение 15 мс, что активирует состояние 4 типового LPT 10. По истечении времени активации 15 мс на этапе S205 микроконтроллер 410 генерирует цифровой сигнал, представляющий 0 мА (то есть команду 800016 из таблицы A), который на этапе S206 поддерживает текущее состояние типового LPT 10, например состояние 4.
Производство типового LPT дешевле, чем пьезоэлектрических клапанов, и имеет более низкий температурный предел, чем температурный предел, характерный для некоторых пьезоэлектрических биморфных конструкций. Типовой LPT может работать при температурах примерно от +85°С до -60°С за счет согласования величин температурного коэффициента линейного расширения верхней части корпуса, нижней части корпуса, питающего штуцера и якоря. Кроме того, типовой LPT является по сути более надежным в промышленных условиях, включая его влагостойкость за счет пассивирования открытых поверхностей.
Кроме того, типовой LPT может работать при пневматических давлениях питания в диапазоне примерно от 20 фунт/кв. дюйм изб. давления до 150 фунт/кв. дюйм изб. давления. В результате возможности работы во всем диапазоне величин давления питания для него не требуется никакого дополнительного регулятора давления питания для регулирования источника давления, подаваемого в типовой LPT. Кроме того, в традиционных конструкциях преобразователей используется пневматический контур, состоящий из единственной модулированной текучей среды выхлопного клапана, соединенного с питающим отверстием фиксированного диаметра. В такой конструкции выхлопной поток модулируется по отношению к питающему потоку, который проходит через отверстие фиксированного диаметра. Такое дросселирование требует определенного спокойного (то есть ненулевого стационарного состояния) потока, проходящего как через модулированные, так и постоянные сопротивления, что увеличивает потребление воздуха. Типовой LPT поочередно модулирует поток текучей среды через питающий штуцер, чтобы по сути исключить постоянный пассивный поток через преобразователь.
Как было отмечено выше, потребляемая электрическая мощность, необходимая для поддержания пневматического контура типового LPT либо в состоянии с высоким уровнем выходной мощности, либо в состоянии с низким уровнем выходной мощности равна нулю (0) мВт и, наконец, соединения питающего и выхлопного отверстий могут быть изменены на противоположные, чтобы обеспечить реверсный режим работы типового LPT. Эта возможность создает дополнительную свободу в проектировании контрольно-измерительных приборов, для которых снижается потребность в дополнительных трубопроводах или трубах за счет использования пневматических подключений в реверсном режиме, тем самым позволяя вносить изменения в конструкцию для работы в прямом и реверсном режиме.
В то время как в данном документе раскрыты определенные варианты реализации способов, устройств и изделий, объем притязаний по данному патенту ими не ограничивается. Наоборот, данный патент охватывает все способы, устройства и изделия, явно находящихся в рамках объема прилагаемой формулы изобретения либо в прямом смысле, либо исходя из доктрины эквивалентов. Например, электромагнит для узла верхнего модуля может использовать катушку, сформированную вокруг каркаса. Кроме того, в рамках сущности и объема типового LPT при создании электромагнитного контура могут быть использованы дополнительные магнитные стали или сплавы, например, Carpenter 49. Кроме того, конструкция может содержать возвратную пружину между плунжером клапана и питающим штуцером, которая возвращает плунжер клапана к выхлопному отверстию, чтобы способствовать закрытию, когда LPT находится в состоянии 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОТКАЗОУСТОЙЧИВЫЙ ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2765400C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПЕРЕКЛЮЧАЮЩИЙ КЛАПАН | 2015 |
|
RU2686649C2 |
| СЕРВОПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ, ПРИВОДИМЫЙ В ДЕЙСТВИЕ ТЕКУЧЕЙ СРЕДОЙ | 2011 |
|
RU2548837C2 |
| РАСПРЕДЕЛИТЕЛЬНОЕ КЛАПАННОЕ УСТРОЙСТВО | 1989 |
|
RU2074990C1 |
| СЕРВОПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ, ПРИВОДИМЫЙ В ДЕЙСТВИЕ ТЕКУЧЕЙ СРЕДОЙ | 2011 |
|
RU2551468C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАСХОДА ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2011 |
|
RU2586811C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ГАЗОВОГО ПОТОКА | 2002 |
|
RU2216762C1 |
| Электропневматический преобразователь | 1975 |
|
SU572591A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАСХОДОМ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 1990 |
|
RU2079163C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1990 |
|
RU2005943C1 |
Преобразователь для подключения к источнику давления текучей среды, имеющему механизм установки пневматического выходного сигнала посредством электрического входного сигнала. Преобразователь обеспечивает узел нижней части корпуса и узел верхней части корпуса. Узел нижней части корпуса содержит нижнюю часть корпуса, выполненную с возможностью размещения штуцера питания. Питающий штуцер сообщается по текучей среде с питающим отверстием и периодически сообщается по текучей среде с выходным отверстием нижней части корпуса через внутренний проходной канал для текучей среды. Узел верхней части корпуса содержит верхнюю часть корпуса, выполненную с возможностью размещения катушки и якоря, в результате чего верхняя часть корпуса, катушка и якорь образуют фиксирующий электромагнитный контур, который устанавливает поочередный контакт якоря с питающим штуцером в узле нижней части корпуса. 2 н. и 11 з.п. ф-лы, 13 ил., 1 табл.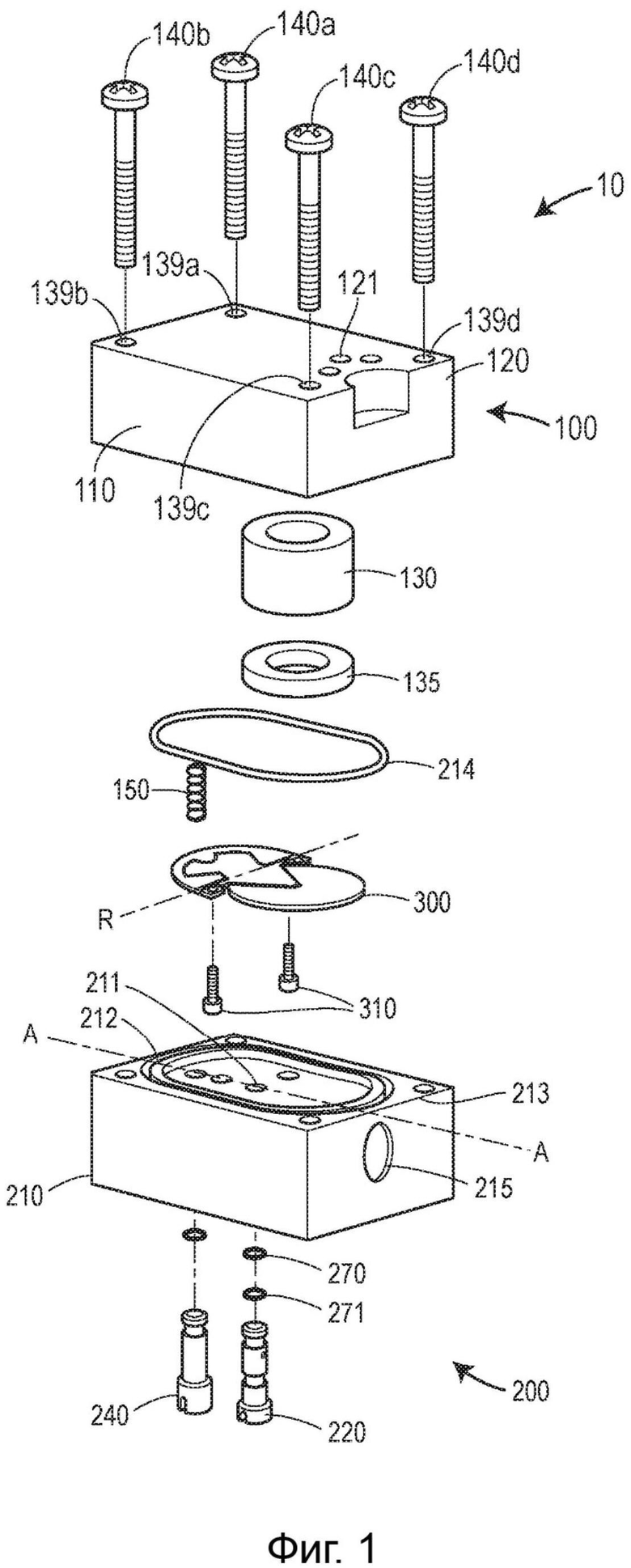
1. Электропневматический преобразователь, содержащий:
узел нижнего модуля, причем узел нижнего модуля содержит нижнюю часть корпуса и питающий штуцер, при этом питающий штуцер сообщается по текучей среде с питающим отверстием и периодически сообщается по текучей среде с выходным отверстием нижней части корпуса через внутренний проходной канал для текучей среды, причем нижняя часть корпуса дополнительно содержит выхлопной внутренний канал, сообщающийся по текучей среде с выхлопным отверстием и периодически сообщающийся по текучей среде с выходным отверстием нижней части корпуса через внутренний проходной канал для текучей среды; и
узел верхнего модуля, причем узел верхнего модуля содержит верхнюю часть корпуса, катушку и якорь, при этом верхняя часть корпуса, катушка и якорь образуют фиксирующий электромагнитный контур, который устанавливает чередующееся контактное усилие якоря для воздействия над плунжером клапана, расположенного в питающем штуцере узла нижней части корпуса, причем катушка выполнена с возможностью приема входного электрического сигнала для активации и деактивации электромагнитного контура для фиксации выходного отверстия в состоянии с высоким уровнем выходного сигнала и в состоянии с низким уровнем выходного сигнала, и при этом якорь содержит совокупность шарниров, причем шарниры создают момент силы сжатия пружины, противоположный моменту силы магнитного поля, для чередующейся фиксации якоря в непосредственно прилегающем и не прилегающем к верхней части корпуса положениях.
2. Электропневматический преобразователь по п. 1, отличающийся тем, что преобразователь выполнен с возможностью поочередного модулирования потока текучей среды через питающее отверстие и выхлопное отверстие.
3. Электропневматический преобразователь по любому из предшествующих пунктов, отличающийся тем, что нижняя часть корпуса выполнена с дополнительной возможностью установки регулировочного винта возвратной пружины, при этом верхняя часть корпуса выполнена с дополнительной возможностью установки возвратной пружины.
4. Электропневматический преобразователь по любому из предшествующих пунктов, отличающийся тем, что возвратная пружина и регулировочный винт возвратной пружины взаимодействуют для обеспечения усилия возвратной пружины для поджатия якоря электромагнитного контура.
5. Электропневматический преобразователь по любому из предшествующих пунктов, отличающийся тем, что электропневматический преобразователь выполнен с возможностью подключения к источнику пневматического питания, и дополнительно при этом преобразователь выполнен с возможностью работы при значениях пневматического давления питания в диапазоне примерно от 20 фунт/кв. дюйм изб. давления до 150 фунт/кв. дюйм изб. давления.
6. Электропневматический преобразователь по любому из предшествующих пунктов, отличающийся тем, что предварительно заданные величины температурного коэффициента линейного расширения верхней части корпуса и нижней части корпуса содействуют получению рабочего диапазона температур от около +85°С до -60°С.
7. Электропневматический преобразователь по любому из предшествующих пунктов, отличающийся тем, что внутренний проходной канал для текучей среды дополнительно содержит камеру давления, внутренний канал питающего отверстия, внутренний канал выхлопного отверстия и выходной внутренний канал.
8. Фиксирующий электропневматический преобразователь, содержащий:
пневматический контур, причем пневматический контур содержит нижнюю часть корпуса, имеющую питающее отверстие, выхлопное отверстие и выходное отверстие, сообщающиеся по текучей среде через внутренний проходной канал для текучей среды и камеру давления, при этом питающее отверстие функционально связано с питающим штуцером, содержащим плунжер клапана, расположенный внутри питающего штуцера; и
электромагнитный контур, причем электромагнитный контур содержит верхнюю часть корпуса, катушку и якорь, при этом якорь содержит совокупность шарниров, причем шарниры создают момент силы сжатия пружины, при этом якорь выполнен с возможностью перемещения при подаче входного электрического сигнала, причем электромагнитный контур создает момент силы магнитного поля, при этом момент силы сжатия пружины и момент силы магнитного поля действуют совместно с чередующейся фиксацией якоря в непосредственно прилегающем и не прилегающем к верхней части корпуса положениях, причем фиксирующий электропневматический преобразователь является альтернативно настраиваемым для работы в прямом режиме и реверсном режиме.
9. Фиксирующий электропневматический преобразователь по п. 8, отличающийся тем, что мощность электрического сигнала по существу равна нулю, когда якорь зафиксирован либо в непосредственно прилегающем, либо не прилегающем к верхней части корпуса положениях.
10. Фиксирующий электропневматический преобразователь по любому из предшествующих пунктов, отличающийся тем, что питающий штуцер сообщается по текучей среде с питающим отверстием и периодически сообщается по текучей среде с выходным отверстием через внутренний проходной канал для текучей среды.
11. Фиксирующий электропневматический преобразователь по любому из предшествующих пунктов, отличающийся тем, что преобразователь может работать при значениях пневматического давления питания в диапазоне примерно от 20 фунт/кв. дюйм изб. давления до 150 фунт/кв. дюйм изб. давления.
12. Фиксирующий электропневматический преобразователь по любому из предшествующих пунктов, отличающийся тем, что предварительно заданные величины температурного коэффициента линейного расширения верхней части корпуса и нижней части корпуса содействуют получению рабочего диапазона температур от около +85°С до -60°С.
13. Фиксирующий электропневматический преобразователь по любому из предшествующих пунктов, отличающийся тем, что внутренний проходной канал для текучей среды дополнительно содержит камеру давления, внутренний канал питающего отверстия, внутренний канал выхлопного отверстия и выходной внутренний канал.
| Фиксатор стопы | 1988 |
|
SU1651896A1 |
| RU 2013147746 A, 10.05.2015 | |||
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2352974C1 |

