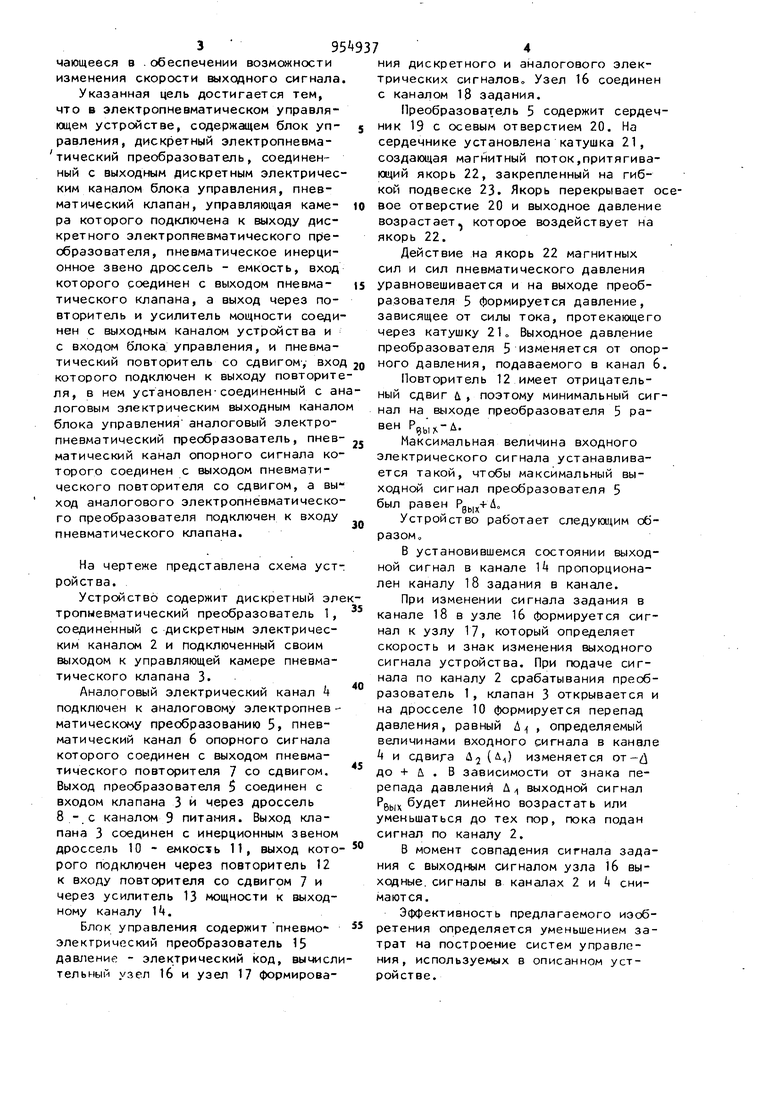
Изсзбретение относится к средствам автоматики, а именно к устройствам для преобразования электрического сигнала в пневматический сигнал, изм няющийся с заданной скоростью. Известны устройства преобразования входного электрического цифрового сигнала в пневматический аналоговый сигнал, которые содержат электропневматический цифроаналоговый преобразователь, узел пневматической памяти на каждом управляемом канале, дешифратор адреса каналов и электропневматические реле по числу каналов. Узел пневматической памяти содержит запоминающий элемент с силь фоном и цанговым зажимом и схему управления 0 . Недостатки известного устройства сложность конструкции и недсютаточная надежность. Наиболее близким к предлагаемому по технической .сущности является устройство, которое содержит блок управления дискретный электропневматический преобразователь, соединенный с первым выходом электрическим каналом блока управления, пневматический клапан, управляющая камера которого подключена к выходу дискретного электропневматического преобразователя, пневматическое инерционное звено дроссель-емкость, вход которого соединен с выходом пневматического клапана, а выход через повторитель и усилитель мсхцности соединен с выходным каналом устройства и с входом блока управления, и пневматический повторитель со сдвигом, вход которого подключен к выходу повторителя. Кроме того, известное устройство содержит второй повторитель со сдвигом и второй клапан 2 . Такая схема позволяет формировать выходной сигнал, изменяющийся с постоянной скоростью. Цель изобретения - расширение области применения устройства, заклю3 9 чающееся в . обеспечении возможности изменения скорости выходного сигнала Указанная цель достигается тем, что в электропневматическом управляющем устройстве, содержащем блок управления, дискретный электропневматический преобразователь, соединенный с выходным дискретным электричес ким каналом блока управления, пневматический клапан, управляющая камера которого подключена к выходу дискретного электропиевматического преобразователя, пневматическое инерционное звено дроссель - емкость, вход которого соединен с выходом пневматического клапана, а выход через повторитель и усилитель мощности соеди нен с выходным каналом устройства и с входом блока управления, и пневматический повторитель со сдвигом , вхо которого подключен к выходу повторит ля, в нем установлен-соединенный с а логовым электрическим выходным канало блока управления аналоговый электропневматический преобразователь, пнев матический канал опорного сигнала ко торого соединен с выходом пневматического повторителя со сдвигом, а вы ход аналогового электропневматическо го преобразователя подключен к входу пневматического клапана. На чертеже представлена схема уст ройства. Устройство содержит дискретный эл тропневматический преобразователь 1, соединенный с дискретным электрическим каналом 2 и подключенный своим выходом к управляющей камере пневматического клапана 3. Аналоговый электрический канал k подключен к аналоговому электропнев матическому преобразованию 5, пневматический канал 6 опорного сигнала которого соединен с выходом пневматического повторителя 7 со сдвигом. Выход преобразователя 5 соединен с входом клапана 3 и через дроссель 8 - с каналом 9 питания. Выход клапана 3 соединен с инерционным звеном дроссель 10 - емкость 11, выход кото рого подключен через повторитель 12 к входу повторителя со сдвигом 7 и через усилитель 13 мощности к выходному каналу . Блок управления содержит пневмоэлектрический преобразователь 15 давление - электрический код, вычисл тельный узел 16 и узел 17 формирования дискретного и аналогового электрических сигналов. Узел 16 соединен с каналом 18 задания. Преобразователь 5 содержит сердечник 19 с осевым отверстием 20. На сердечнике установлена катушка 21, создающая магнитный поток,притягивающий якорь 22, закрепленный на гибкой подвеске 23. Якорь перекрывает осевое отверстие 20 и выходное давление возрастает, которое воздействует на якорь 22. Действие на якорь 22 магнитных сил и сил пневматического давления уравновешивается и на выходе преобразователя 5 формируется давление, зависящее от силы тока, протекающего через катушку 21 Выходное давление преобразователя 5 изменяется от опорного давления, подаваемого в канал 6. Повторитель 12 имеет отрицательный сдвиг 4, поэтому минимальный сигнал на выходе преобразователя 5 равенМаксимальная величина входного электрического сигнала устанавливается такой, чтобы максимальный выходной сигнал преобразователя 5 был равен Рому+Л Устройство работает следующим образом, В установившемся состоянии выходной сигнал в канале 1A пропорционален каналу 18 задания в канале. При изменении сигнала задания в канале 18 в узле 16 формируется сигнал к узлу 17, который определяет скорость и знак изменения выходного сигнала устройства. При подаче сигнала по каналу 2 срабатывания преобразователь 1, клапан 3 открывается и на дросселе 10 формируется перепад давления, равный & , определяемый величинами входного сигнала в канале А и сдвига 2 () изменяется от-Д до + U . В зависимости от знака перепада давления Д выходной сигнал будет линейно возрастать или уменьшаться до тех пор, пока подан сигнал по каналу 2. В момент совпадения сигнала задания с выходным сигналом узла 16 выходные, сигналы в каналах 2 и 4 снимаются. Эффективность предлагаемого изобретения определяется уменьшением затрат на построение систем управления, используемых в описанном устройстве.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропневматическое управляющее устройство | 1979 |
|
SU924717A1 |
| Устройство многоканального управления | 1979 |
|
SU974337A1 |
| Пневматический генератор непрерывного линейно убывающего сигнала | 1990 |
|
SU1732355A1 |
| Пневматическое устройство ограничения "шага" сигнала задания регуляторам | 1988 |
|
SU1583942A1 |
| Пневматический цифро-аналоговый преобразователь | 1978 |
|
SU666549A1 |
| Система сопряжения управляющего вычислительного комплекса с пневматическими регуляторами | 1980 |
|
SU905847A1 |
| Система ввода информации от пневматических датчиков в электронную управляющую вычислительную машину | 1980 |
|
SU900307A1 |
| Пневмоэлектронная система регулирования | 1988 |
|
SU1547016A1 |
| ЭЛЕКТРОПНЕВМАТИЧЁСКИЙ ЦИФРО-АНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1972 |
|
SU348990A1 |
| ПНЕВМАТИЧЕСКИЙ ЗАДАТЧИК ДАВЛЕНИЯ | 1991 |
|
RU2023301C1 |
