Настоящее изобретение относится к расцепляющему механизму для электрического коммутационного аппарата. Расцепляющий механизм содержит защитный корпус и первые электрические соединительные контакты. Расцепляющий механизм дополнительно содержит модуль питания, содержащий по меньшей мере один трансформатор, и вторые входные и выходные контакты, способные соединяться с первыми контактами 0в соответствии с направлением соединения. Модуль питания способен генерировать напряжение питания на основе входного напряжения, получаемого между вторыми входными контактами, и подавать напряжение питания между вторыми выходными контактами.
Настоящее изобретение также относится к электрическому коммутационному аппарату, например прерывателю цепи, содержащему такой расцепляющий механизм.
Документ EP 0 843 332 A1 раскрывает аппарат коммутации электрического тока, при этом коммутационный аппарат содержит расцепляющий механизм. Расцепляющий механизм соединен с датчиками электрического тока и управляет электрической коммутацией аппарата на основе информации, полученной от датчиков электрического тока. Этот расцепляющий механизм содержит специальный модуль подачи питания, питаемый напряжением на входе в коммутационный аппарат и генерирующий напряжение питания расцепляющего механизма. Такой модуль питания известен как питающийся входным напряжением источник питания. Он обеспечивает возможность питания расцепляющего механизма без соединения со вспомогательным источником питания и работает, даже когда коммутационный аппарат блокирует прохождение электрического тока.
Однако, такой питающийся входным напряжением источник питания является уязвимым и может деформироваться при определенных рабочих условиях. В частности, во время определенных электрических тестов, таких как, например, которые заданы в стандарте IEC 60 947-2 и стандарте IEC 61 439-1, питающийся входным напряжением источник питания, вероятно, вызывает отказ диэлектрика. Отказ этого типа, следовательно, может привести к разрушению питающегося входным напряжением источника питания, и в таких случаях расцепляющий механизм обычно затем требует полной замены.
Цель изобретения заключается в предложении расцепляющего механизма, обеспеченного с питающимся входным напряжением источником питания, который обеспечивает легкое электрическое отсоединение модуля питания и поддержание безопасности при выполнении электрических тестов.
С этой целью, одним предметом изобретения является расцепляющий механизм вышеупомянутого типа, в котором модуль питания является подвижным относительно защитного корпуса.
В соответствии с другими предпочтительными аспектами изобретения, расцепляющий механизм содержит один или более из следующих признаков, рассматриваемых по отдельности или в любой технически возможной комбинации:
- модуль питания является поступательно перемещаемым относительно защитного корпуса в направлении соединения;
- модуль питания является извлекаемым относительно защитного корпуса;
- модуль питания является подвижным между соединенным положением, в котором вторые контакты соединены с первыми контактами, и по меньшей мере одним отсоединенным положением, в котором вторые контакты отсоединены от первых соединительных контактов;
- расцепляющий механизм дополнительно содержит средства поддержания модуля питания в по меньшей мере одном отсоединенном положении;
- расцепляющий механизм дополнительно содержит защелкивающие средства, подвижные между положением защелкивания, в котором модуль питания блокируется в соединенном положении, и расщелкнутым положением, позволяющим модулю питания перемещаться из соединенного положения;
- модуль питания дополнительно содержит элементы управления, предназначенные для перемещения защелкивающих средств между их защелкнутым положением и их расщелкнутым положением;
- элементы управления прикреплены к захватываемому элементу, предназначенному для захвата оператором; и
- расцепляющий механизм дополнительно содержит стопорные средства, подвижные между стопорным положением, предохраняющим модуль питания от извлечения из защитного корпуса, и свободным положением, обеспечивающим возможность извлечения модуля питания из защитного корпуса.
Другим предметом изобретения является электрический коммутационный аппарат, например прерыватель цепи, содержащий расцепляющий механизм, как определен здесь выше.
В соответствии с другим предпочтительным аспектом изобретения, электрический коммутационный аппарат содержит следующие признаки:
- расцепляющий механизм содержит стопорные средства, подвижные между стопорным положением, предотвращающим извлечение модуля питания из защитного корпуса, и свободным положением, обеспечивающим возможность извлечения модуля питания из защитного корпуса, и электрический коммутационный аппарат дополнительно содержит основание и защитную крышку, съемно прикрепленную к основанию, при этом крышка, когда прикреплена к основанию, закрывает стопорные средства для предотвращения доступа к ним снаружи крышки.
Эти признаки и преимущества изобретения станут очевидными при прочтении нижеследующего описания, приведенного только в качестве неограничивающего примера и приведенного со ссылкой на прилагаемые чертежи, на которых:
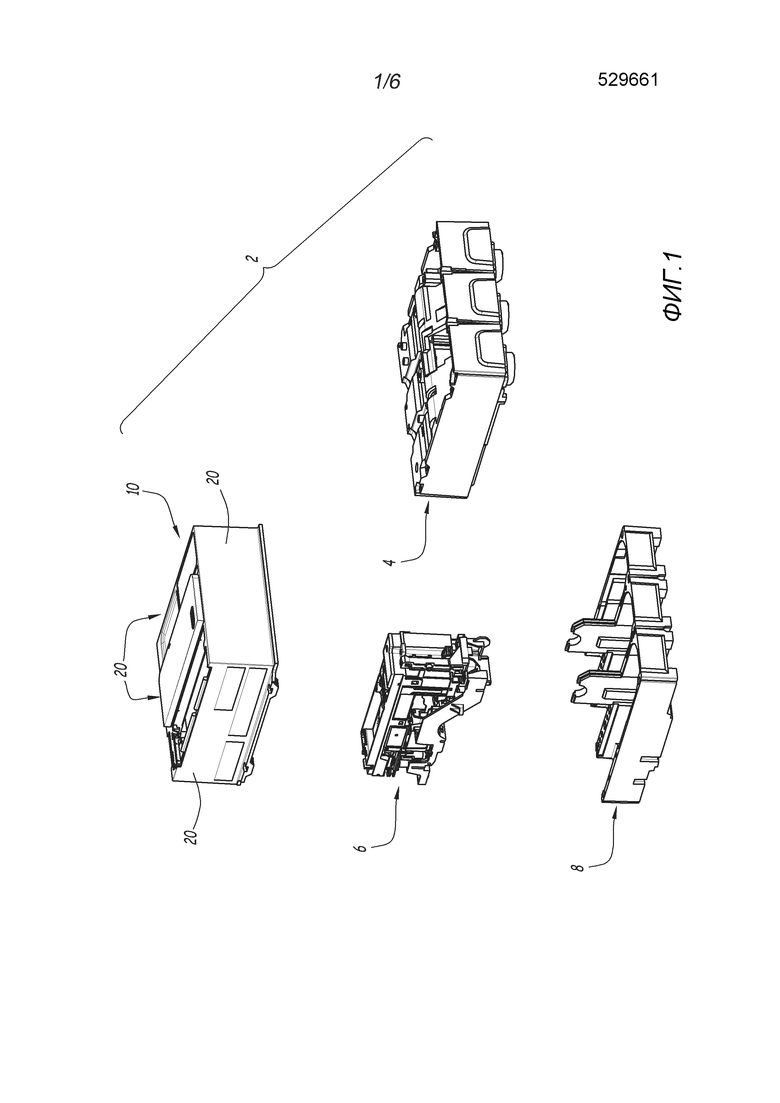
- Фигура 1 представляет собой вид с разнесением деталей коммутационного аппарата, например прерывателя цепи, содержащего защитный кожух и расцепляющий механизм в соответствии с одним вариантом осуществления изобретения; при этом расцепляющий механизм содержит защитный корпус, первые соединительные контакты и модуль питания, который является подвижным относительно защитного кожуха между соединенным положением и по меньшей мере одним отсоединенным положением, при этом расцепляющий механизм дополнительно содержит средства для поддержания модуля в первом отсоединенном положении, средства для защелкивания модуля в соединенном положении, и стопорные средства, способные предотвращать извлечение модуля, при этом модуль питания находится в соединенном положении на Фигуре 1;
- Фигура 2 представляет собой вид в перспективе расцепляющего механизма Фигуры 1, при этом модуль питания находится в первом отсоединенном положении;
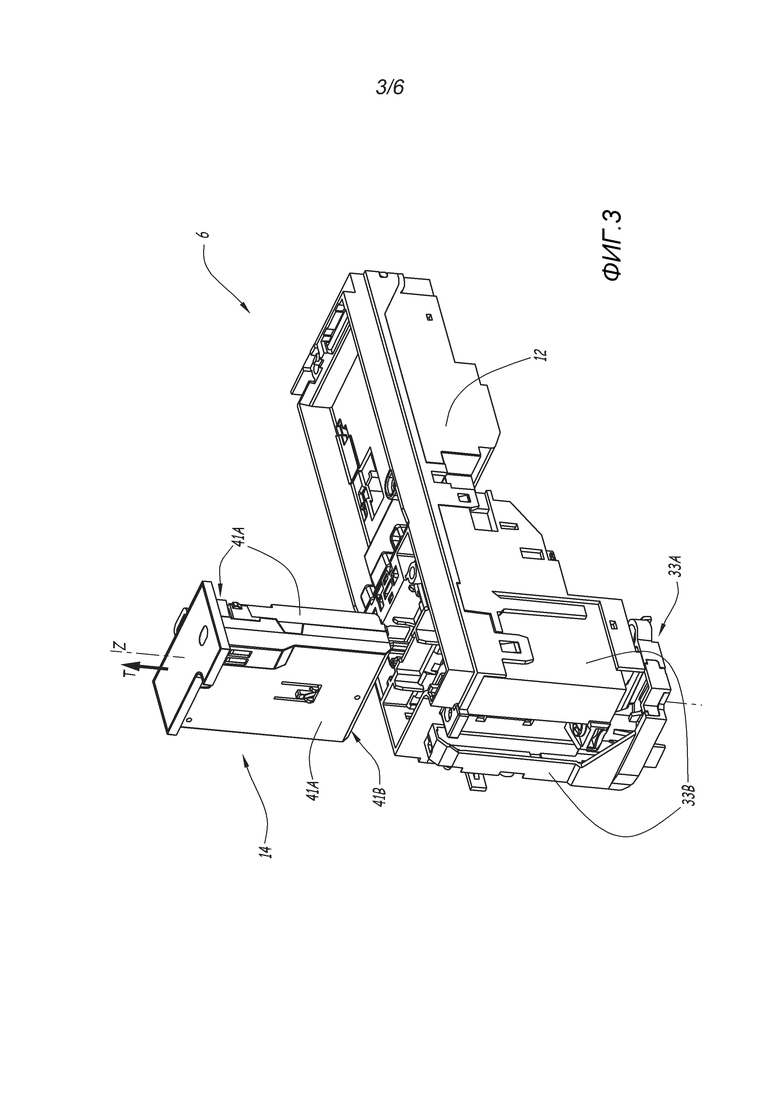
- Фигура 3 представляет собой вид в перспективе расцепляющего механизма Фигуры 1, при этом модуль питания полностью извлечен из защитного корпуса, в соответствии со вторым отсоединенным положением;
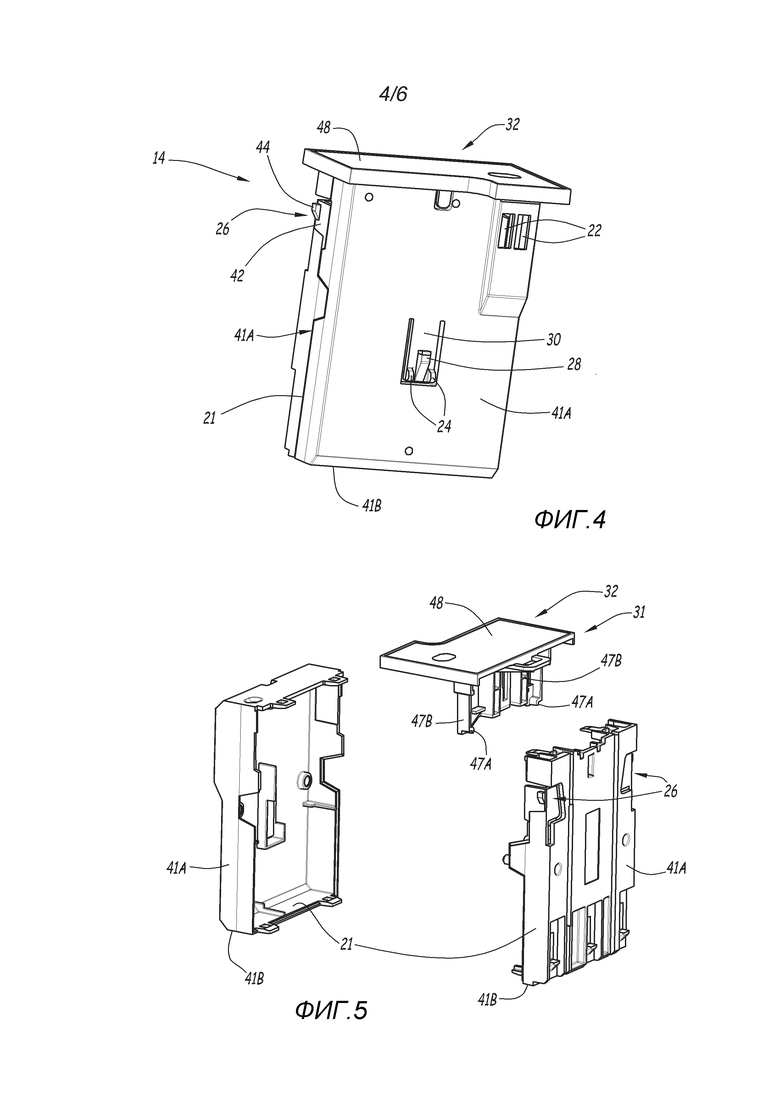
- Фигура 4 представляет собой вид в перспективе модуля питания Фигуры 1, при этом модуль содержит защитный корпус и вторые соединительные контакты;
- Фигура 5 представляет собой вид с разнесением деталей модуля питания Фигуры 4, при этом модуль питания содержит схему преобразования и захват, оснащенный элементами для управления защелкивающими средствами;
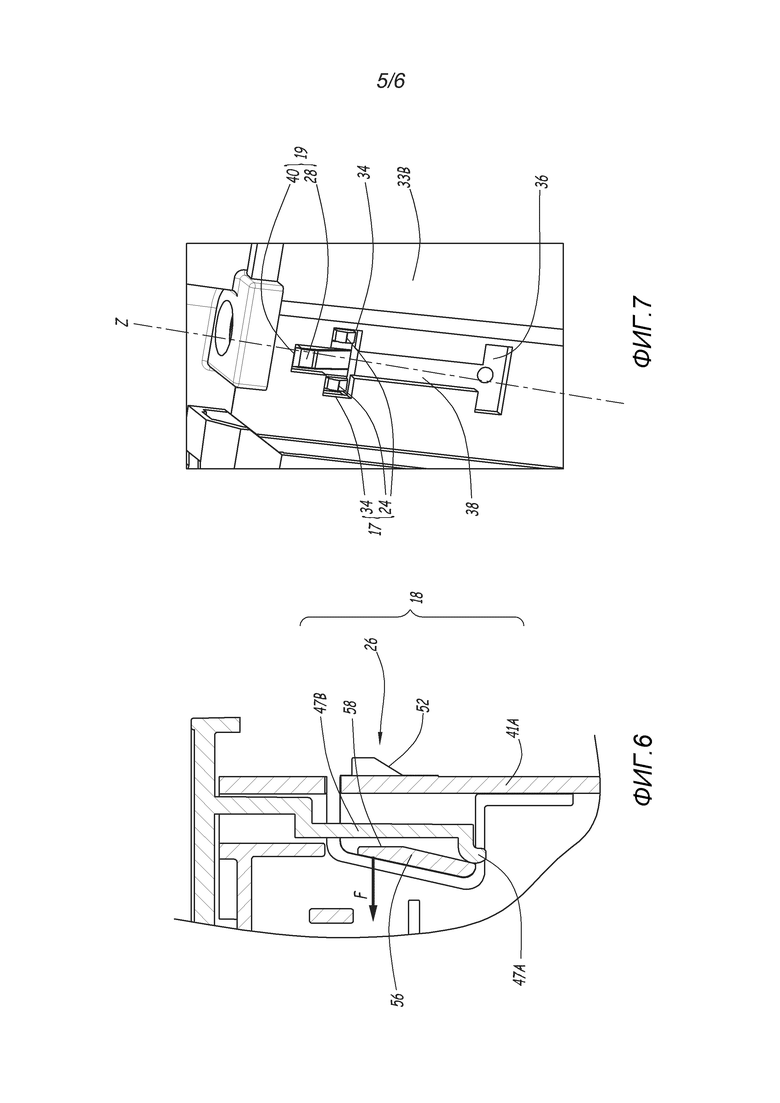
- Фигура 6 представляет собой частичный вид в перспективе защелкивающих средств и элементов управления Фигуры 4;
- Фигура 7 представляет собой частичный вид в перспективе расцепляющего механизма Фигуры 1, с модулем питания в первом отсоединенном положении; и
- Фигура 8 представляет собой частичный вид в перспективе расцепляющего механизма Фигуры 1 с модулем питания в соединенном положении, в котором вторые контакты соединены с первыми контактами.
Фигура 1 представляет собой вид с разнесением деталей электрического коммутационного аппарата 2 в соответствии с изобретением. Коммутационный аппарат 2 представляет собой, например, прерыватель цепи, например электромеханический прерыватель цепи, или в качестве альтернативы выключатель. Прерыватель цепи представляет собой, например, трехфазный прерыватель цепи, как изображено на Фигуре 1.
На Фигуре 1, электрический коммутационный аппарат 2 содержит несколько модулей, отдельных друг от друга, включая, в частности, узел 4 прерывателя цепи и расцепляющий механизм 6. В качестве необязательного дополнения, коммутационный аппарат 2 содержит другие модули, например калибровочные модули, способные оценивать работу коммутационного аппарата, или коммуникационные модули, способные передавать состояние аппарата 2 на другие удаленные электронные устройства, при этом связь осуществляется, например, посредством радиоволн.
Коммутационный аппарат 2 также содержит основание 8 и крышку 10.
Узел 4 прерывателя цепи содержит первичные соединительные контакты (не показаны), предназначенные для соединения с по меньшей мере одним входным проводником и по меньшей мере одним выходным проводником (ни тот, ни другой не показан).
Узел 4 прерывателя цепи способен размещать расцепляющий механизм 6. Узел 4 прерывателя цепи способен получать по меньшей мере один электрический ток I на входном проводнике.
Узел 4 прерывателя цепи по сути известен и способен прерывать передачу электрического тока I от входного проводника на выходной проводник в ответ на сигнал расцепления.
Узел 4 прерывателя цепи представляет собой, например, воздушный прерыватель цепи или прерыватель цепи в формованном кожухе. На Фигуре 1, узел 4 прерывателя цепи представляет собой трехполюсный узел, содержащий один полюс для каждой из фаз, связанных с трехфазным прерывателем.
На Фигурах 2 и 3, расцепляющий механизм 6 содержит защитный корпус 12, модуль 14 питания, пространство 16 для размещения модуля 14 питания, и первые вторичные соединительные контакты (которые не были изображены). Модуль 14 питания является подвижным относительно защитного корпуса 12 между соединенным положением, в котором указанный модуль 14 электрически соединен с расцепляющим механизмом 6, и по меньшей мере одним отсоединенным положением, в котором указанный модуль 14 электрически не соединен с расцепляющим механизмом 6.
Расцепляющий механизм 6 дополнительно содержит средство 17 для поддержания модуля в по меньшей мере одном отсоединенном положении, средство 18 для защелкивания модуля в соединенном положении, и стопорное средство 19, способное предохранять модуль 14 питания от извлечения из корпуса 12, как изображено на Фигурах 6 и 7.
Расцепляющий механизм 6 способен генерировать сигнал расцепления исходя из измерения электрического тока I. Например, расцепляющий механизм 6 содержит датчик электрического тока, не изображен, способный генерировать сигнал, обозначающий измерение электрического тока I. Расцепляющий механизм 6 затем способен подавать сгенерированный сигнал расцепления, направляющийся в узел 4 прерывателя цепи.
Основание 8, видимое на Фигуре 1, способно размещать узел 4 прерывателя цепи для образования сборки прерывателя цепи.
Крышка 10 имеет вид параллелепипеда и содержит четыре боковые стенки 20. Крышка 10 съемно прикрепляется к узлу 4 прерывателя цепи для образования защитного кожуха. Крышка 10 способна по меньшей мере частично закрывать расцепляющий механизм 6, когда она прикреплена к узлу 4 прерывателя цепи. Крышка 10, предпочтительно, способна обеспечивать частичный доступ к модулю 14 питания, когда крышка 10 прикреплена к узлу 4 прерывателя цепи.
На Фигуре 4, модуль 14 питания содержит корпус 21, вторые вторичные соединительные контакты 22, способные взаимодействовать с первыми вторичными контактами, при этом вторые вторичные контакты содержат вторые вторичные входные контакты и вторые вторичные выходные контакты.
Модуль 14 питания является подвижным в направлении соединения между соединенным положением, в котором вторые вторичные контакты 22 соединены с первыми вторичными контактами, и одним отсоединенным положением (одним из отсоединенных положений), в котором вторые вторичные контакты 22 отсоединены от первых вторичных контактов.
Модуль 14 питания, предпочтительно, является поступательно перемещаемым в направлении соединения, которое соответствует, например, вертикальному направлению Z в пространстве 16.
Модуль 14 питания, предпочтительно, является извлекаемым относительно защитного корпуса 12. Другими словами, модуль 14 питания является полностью извлекаемым из защитного корпуса 12. В этом случае, модуль 14 питания является подвижным относительно защитного корпуса 12 между соединенным положением, первым отсоединенным положением, в котором вторые вторичные контакты 22 отсоединены от первых вторичных контактов (Фигура 2), и вторым отсоединенным положением, в котором модуль 14 питания больше не контактирует с защитным корпусом 12 (Фигура 3).
Модуль 14 питания дополнительно содержит выступы 24 для поддержания модуля 14 питания в первом отсоединенном положении, элементы 26 для защелкивания модуля 14 питания в соединенном положении, и стопорный выступ 28, способный предотвращать перемещение модуля 14 питания из первого отсоединенного положения во второе отсоединенное положение, если только поперечное давление не прикладывается снаружи к указанному стопорному выступу 28. В примере Фигуры 4, удерживающие выступы 24 и стопорный выступ 28 имеются на упругом язычке 30.
Модуль питания дополнительно содержит элементы 31 управления, предназначенные для перемещения защелкивающих средств 18 между их положением защелкивания и их расщелкнутым положением.
Модуль 14 питания также содержит захват 32, при этом захват 32, предпочтительно, прикреплен к элементам 31 управления.
Модуль 14 питания также содержит схему преобразования (не изображена), способную генерировать преобразованное напряжение из входного напряжения. Модуль 14 питания способен получать входное напряжение между вторыми вторичными входными контактами. Модуль питания способен подавать преобразованное напряжение между вторыми вторичными выходными контактами.
Пространство 16 ограничено нижней стенкой 33A и четырьмя боковыми стенками 33B. Боковые стенки 33B являются, например, прямоугольными.
Пространство 16 содержит первое отверстие 34 для поддержания модуля в первом отсоединенном положении. Первое отверстие 34 способно взаимодействовать с удерживающими выступами 24 посредством пружинного скрепления и, например, образовано в соответствующей боковой стенке 33B, как изображено на Фигуре 7.
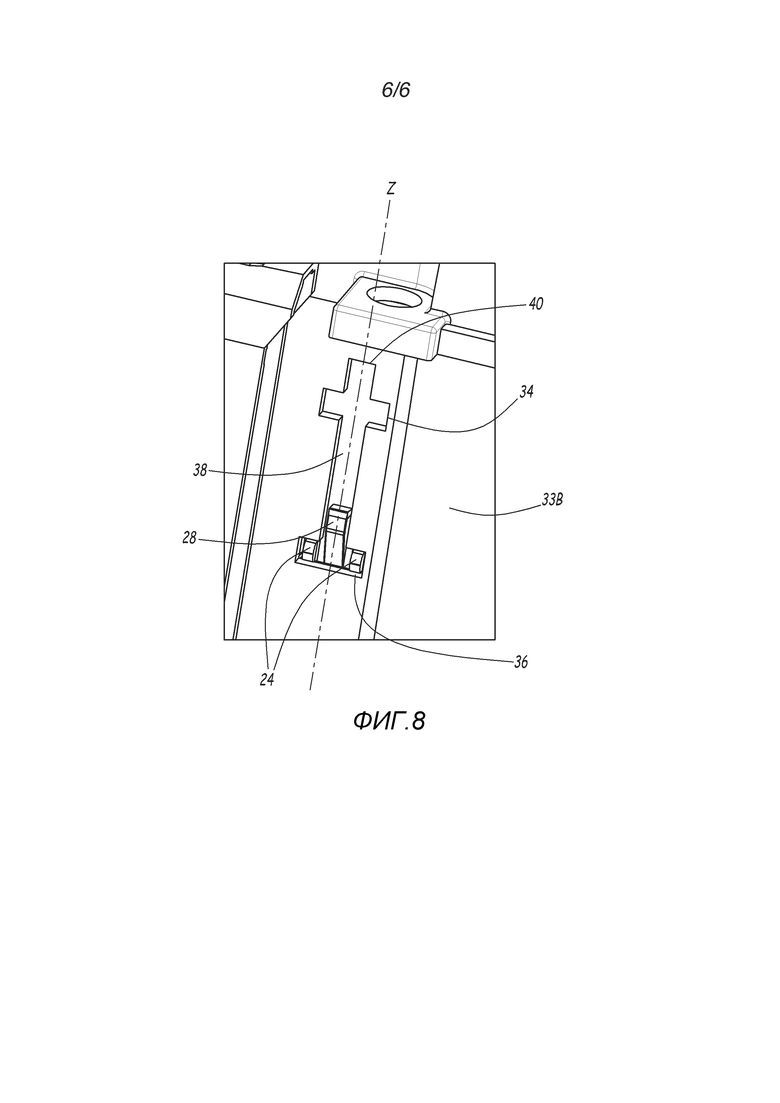
Пространство 16 содержит второе отверстие 36, способное взаимодействовать с удерживающими выступами 24 посредством пружинного скрепления, когда модуль 14 питания находится в соединенном положении, и образовано, например, в соответствующей боковой стенке 33B, как изображено на Фигуре 8.
Пространство 16 содержит элементы 37 для блокировки модуля 14 питания в соединенном положении. Блокирующие элементы 37 способны взаимодействовать с защелкивающими элементами 26 для блокировки модуля 14 питания в соединенном положении. Каждый блокирующий элемент 37 имеет, например, форму полости, образованной в соответствующей боковой стенке 33B пространства 16. В качестве альтернативы, которая не была изображена, каждый блокирующий элемент 37 имеет форму блокирующего выпуклого элемента, выступающего от соответствующей боковой стенки пространства 16.
Пространство 16 содержит вертикальный паз 38, способный размещать стопорный выступ 28. Паз 38 представляет собой, например, отверстие, образованное в соответствующей боковой стенке 33B. Паз 38 содержит концевой стопор 40, способный взаимодействовать со стопорным выступом 28 для предохранения модуля 14 питания от перемещения из первого отсоединенного положения во второе отсоединенное положение, если только поперечное давление не прикладывается снаружи к указанному стопорному выступу 28.
Первые вторичные соединительные контакты располагаются на одном уровне на боковой стенке 33B пространства, размещающего модуль 14 питания.
Удерживающие средства 17 способны поддерживать модуль 14 питания в первом отсоединенном положении. Удерживающие средства 17 представляют собой, например, упругие удерживающие средства. На Фигуре 7, удерживающие средства 17 содержат первое отверстие 34, и удерживающие выступы 24 способны взаимодействовать с первым отверстием 34.
В качестве альтернативы, которая не была изображена, удерживающие средства 17 представляют собой магнитные удерживающие средства и, например, содержат постоянный магнит, прикрепленный к модулю 14 питания, и первый ферромагнитный элемент, прикрепленный к защитному корпусу 12, при этом постоянный магнит выполнен так, чтобы прикладывать силу магнитного притяжения к первому ферромагнитному элементу, когда он обращен к последнему. Постоянный магнит, например, размещается в полости, образованной в корпусе 21, и первый ферромагнитный элемент аналогичным образом размещается в полости, образованной в защитном корпусе 12, при этом соответствующие положения постоянного магнита и первого ферромагнитного элемента являются такими, что постоянный магнит и первый ферромагнитный элемент обращены друг к другу, когда модуль 14 питания находится в первом отсоединенном положении.
Защелкивающие средства 18 представляют собой, например, упругие защелкивающие средства. На Фигуре 6, защелкивающие средства 18 содержат блокирующие элементы 37, имеющиеся на корпусном пространстве 16, и защелкивающие элементы 26, имеющиеся на модуле 14 питания.
В альтернативной форме, которая не была изображена, защелкивающие средства 18 представляют собой магнитные защелкивающие средства и содержат, например, постоянный магнит, прикрепленный к модулю 14 питания, и второй ферромагнитный элемент, прикрепленный к защитному корпусу 12, при этом постоянный магнит выполнен так, чтобы прикладывать силу магнитного притяжения ко второму ферромагнитному элементу, когда он обращен к последнему. Второй ферромагнитный элемент, например, размещается в соответствующей полости, образованной в защитном корпусе 12, и соответствующие положения постоянного магнита и второго ферромагнитного элемента являются такими, что постоянный магнит и второй ферромагнитный элемент обращены друг к другу, когда модуль 14 питания находится в соединенном положении.
Стопорные средства 19 представляют собой, например, упругие стопорные средства. На Фигуре 7, стопорные средства 19 содержат стопорный выступ 28 и концевой стопор 40, способный взаимодействовать со стопорным выступом 28.
Защитный корпус 21 имеет, например, форму прямоугольного параллелепипеда. Защитный корпус 21 содержит четыре боковые поверхности 41A и нижнюю поверхность 41B. Боковые поверхности 41A являются, например, прямоугольными. На Фигуре 5, защитный корпус 21 выполнен из двух отдельных частей.
Вторые вторичные соединительные контакты 22 электрически соединены со схемой преобразования. Вторые вторичные соединительные контакты 22 способны соединяться с первыми вторичными соединительными контактами, когда модуль 14 питания находится в соединенном положении.
Схема преобразования содержит по меньшей мере один трансформатор напряжения, не изображен. Схема преобразования содержит, например, преобразователь переменного тока/постоянного тока или, в качестве альтернативы, преобразователь постоянного тока/переменного тока.
Защелкивающие элементы 26 являются подвижными между защелкнутым положением и расщелкнутым положением. В защелкнутом положении, защелкивающие элементы 26 способны взаимодействовать с блокирующими элементами 37 для блокировки модуля 14 питания в соединенном положении. В расщелкнутом положении, защелкивающие элементы 26 выполнены так, чтобы позволять модулю 14 питания перемещаться из соединенного положения. На Фигурах 4 и 6, защелкивающие элементы 26 содержат два гибких участка 42, при этом каждый оснащен защелкивающим выступом 44 и комплементарными средствами 46 управления, способными взаимодействовать с элементами 31 управления.
На Фигуре 4, упругий язычок 30 выполнен за одно целое с защитным корпусом 21. Язычок 30 способен деформироваться по направлению внутрь защитного корпуса 21 под действием силы, которая больше веса модуля 14 питания.
Элементы 31 управления содержат по меньшей мере, один исполнительный палец 47A, выполненный с возможностью взаимодействия с комплементарным средством 46 управления, и по меньшей мере одну вертикальную ножку 47B, соединяющую соответствующий исполнительный палец 47A с захватом 32, как изображено на Фигуре 6. В варианте осуществления Фигуры 5, элементы 31 управления содержат два исполнительных пальца 47A и две вертикальные ножки 47B, соединяющие исполнительные пальцы с захватом 32. Каждый исполнительный палец 47A выполнен с возможностью воздействия на соответствующий гибкий участок 42.
На Фигуре 5, захват 32 содержит верхнюю пластину 48. Верхняя пластина 48 прикреплена к каждой вертикальной ножке 47B, и каждая вертикальная ножка 47B, например, выполнена за одно целое с верхней пластиной 48. Верхняя пластина 48 и элементы 31 управления являются поступательно перемещаемыми в направлении Z соединения относительно защитного корпуса 21.
Вертикальный паз 38 способен обеспечивать возможность вертикального поступательного перемещения стопорного выступа 28. Вертикальный паз 38 имеет такие размеры, что стопорный выступ 28 входит в контакт с концевым стопором 40, когда модуль 14 питания находится в первом отсоединенном положении. В предпочтительном варианте осуществления, вертикальный паз 38 способен закрываться крышкой 10, когда она прикреплена к узлу 4 прерывателя цепи.
Концевой стопор 40 размещен в верхнем конце вертикального паза 38.
На Фигуре 6, защелкивающий выступ 44 содержит наклонную поверхность 52, способную облегчать перемещение модуля 14 питания из одного из отсоединенных положений в соединенное положение.
Защелкивающий выступ 44 способен предохранять модуль 14 питания от перемещения из соединенного положения, когда защелкивающие средства 18 находятся в защелкнутом положении. На Фигуре 6, защелкивающий выступ 44 содержит блокирующую поверхность 54, способную взаимодействовать с блокирующим элементом 37. Блокирующая поверхность 54 является, предпочтительно, по существу, перпендикулярной относительно направления Z соединения.
Комплементарные средства 46 управления содержат, для каждого гибкого участка 42, кулачковую поверхность 56, способную взаимодействовать с соответствующим исполнительным пальцем 47A для перемещения соответствующего защелкивающего выступа 44 по направлению внутрь модуля 14 питания, то есть для побуждения защелкивающих средств 18 перемещаться из их защелкнутого положения в их расщелкнутое положение. Кулачковая поверхность 56 образует угол, лежащий строго от 0° до 90° относительно боковой поверхности 41A корпуса, то есть относительно вертикального направления Z, при этом угол, предпочтительно, составляет от 10 до 50°.
Комплементарные средства 46 управления содержат, для каждого гибкого участка 42, поверхность 58 для стабилизации защелкивающего выступа 44 на удалении от соответствующего блокирующего элемента 37. Каждая стабилизирующая поверхность 58 выполнена с возможностью поддержания защелкивающих средств 18 в их расщелкнутом положении после захвата оператором захвата 32. Каждая стабилизирующая поверхность 58 является, по существу, параллельной относительно боковой поверхности 41A корпуса, а именно относительно вертикального направления Z. Каждая стабилизирующая поверхность 58 способна поворачиваться на несколько градусов вокруг направления, перпендикулярного относительно вертикального направления Z, когда защелкивающие средства 18 переходят из их защелкнутого положения в их расщелкнутое положение.
Гибкий участок 42, например, выполнен за одно целое с защитным корпусом 21. Гибкий участок 42 способен деформироваться по направлению внутрь защитного корпуса 21, под действием силы F, видимой на Фигуре 6.
В варианте осуществления Фигур 1-8, модуль, который является подвижным, предпочтительно поступательно, относительно защитного кожуха 12, представляет собой модуль 14 питания. Следовательно, специалисту в данной области будет понятным, что изобретение может применяться в более общем смысле к любому модулю расцепляющего механизма 6, и что средства 17, поддерживающие по меньшей мере одно отсоединенное положение, в качестве альтернативы или дополнительно, связаны с любым типом модуля, включенного в расцепляющий механизм 6. Аналогичным образом, стопорные средства 19 и/или защелкивающие средства 18, в качестве альтернативы или дополнительно, связаны с любым типом модуля, включенного в расцепляющий механизм 6 и подвижного относительно защитного корпуса 12.
Таким образом, модуль 14 питания является поступательно перемещаемым относительно защитного корпуса 12 расцепляющего механизма в направлении соединения. Модуль 14 питания является подвижным между соединенным положением и первым отсоединенным положением. Защелкивающие средства 18, по умолчанию, т.е., когда захват 32 не манипулируется, способны блокировать модуль 14 питания в соединенном положении. Другими словами, когда модуль 14 питания находится в соединенном положении и защелкивающие средства 18 находятся в защелкнутом положении, защелкивающие средства 18 предохраняют модуль 14 питания от перемещения из защелкнутого положения, при условии, что захват 32 не манипулируется.
Упругость гибкого участка 42 обеспечивает то, что защелкивающие средства 18 поддерживаются в их защелкнутом положении при отсутствии воздействия на захват 32.
Перемещение защелкивающих средств 18 из их защелкнутого положения в их расщелкнутое положение получается посредством воздействия на захват 32. Поступательное перемещение захвата 32 относительно корпуса 21 побуждает исполнительные пальцы 47A перемещаться в направлении соединения. Благодаря кулачковой поверхности 56, исполнительные пальцы 47A побуждают гибкий участок 42 защелкивающих средств 18, а именно защелкивающих выступов 44, поворачиваться по направлению внутрь корпуса 21. Защелкивающие средства 18, следовательно, перемещаются в их расщелкнутое положение, и продолжающееся направленное вверх тянущее воздействие на захват 32 затем вызывает по меньшей мере частичное извлечение модуля 14 питания из защитного корпуса 12, а именно перемещение модуля 14 питания из его соединенного положения в одно из его отсоединенных положений посредством прикладывания к захвату 32 тяговой силы T в направлении Z соединения, видимой на Фигурах 2 и 3.
Перемещение модуля 14 питания относительно корпуса 12 и перемещение захвата 32 относительно корпуса 21 являются поступательными перемещениями в направлении Z соединения.
Тянущее воздействие на захват 32, следовательно, делает возможным как расщелкивание модуля 14 питания, так и перемещение модуля 14 питания из соединенного положения. Кроме того, выбор такого поступательного перемещения модуля 14 питания относительно корпуса 12 обеспечивает возможность использования удерживающих средств 17, которые являются простыми, таких как упругие удерживающие средства, например удерживающих средств пружинного скрепления или даже магнитных удерживающих средств.
В примере Фигуры 7, модуль 14 питания удерживается в первом отсоединенном положении посредством пружинного скрепления удерживающих выступов 24 в первом отверстии 34. Другими словами, взаимодействие удерживающих выступов 24 посредством пружинного скрепления с первым отверстием 34 обеспечивает удерживающую силу, большую веса модуля 14 питания и которая противостоит указанному весу модуля 14 питания в вертикальном направлении Z.
Гибкость упругого язычка 30 позволяет ему деформироваться по направлению внутрь корпуса 21, когда прикладывается сила, большая удерживающей силы. Прикладывание в направлении соединения силы, большей удерживающей силы, которая сама больше веса модуля 14 питания, в таком случае побуждает модуль 14 питания перемещаться из первого отсоединенного положения в соединенное положение.
В соответствии с Фигурой 8, когда модуль 14 питания находится в соединенном положении, удерживающие выступы 24 защелкнуты в нижнее отверстие 36, и язычок 30, следовательно, находится в его положении покоя. Защелкивание удерживающих выступов 24 в нижнее отверстие 36 обеспечивает возможность размещения стопорного выступа 28 на удалении от боковой стенки 33B и таким образом ограничивает деформацию язычка 30 в этом положении. Гибкость упругого язычка 30 позволяет язычку 30 деформироваться по направлению внутрь корпуса 21, под действием силы, большей веса модуля. Следовательно, если оператор прикладывает силу, большую веса модуля 14 питания, в направлении соединения, оператор может побуждать модуль 14 питания перемещаться из соединенного положения в первое отсоединенное положение, когда защелкивающие средства 18 находятся в их расщелкнутом положении.
Когда модуль 14 питания находится в первом отсоединенном положении, стопорный выступ 28 упирается в концевой стопор 40 вертикального паза 38. Стопорный выступ 28, следовательно, предохраняет модуль 14 питания от перемещения по направлению наружу корпуса 12. Тем не менее, гибкость язычка 30 позволяет оператору побуждать язычок 30 перемещаться по направлению внутрь корпуса 21, например используя инструмент, такой как отвертка, с целью полного извлечения модуля 14 питания из корпуса 12. Оператор затем расцепляет стопорный выступ 28 относительно концевого стопора 40.
В соответствии с предпочтительным вариантом осуществления, крышка 10 полностью закрывает паз 38, когда она прикреплена к узлу 4 прерывателя цепи. Следовательно, необходимо снять крышку 10 для обеспечения возможности расцепления стопорного выступа 28 от концевого стопора 40 и, следовательно, для обеспечения возможности извлечения модуля 14 питания полностью относительно корпуса 12.
В примере Фигуры 1, крышка 10 содержит отверстие, обращенное к захвату 32, и, следовательно, не закрывает захват 32, когда прикреплена к узлу 4 прерывателя цепи. Крышка 10, следовательно, позволяет оператору воздействовать непосредственно на захват 32, без необходимости снятия крышки 10, для перемещения модуля 14 питания между его соединенным положением и его первым отсоединенным положением. Оператор, таким образом, может легко электрически отсоединять модуль 14 питания, например для выполнения тестов, без снятия крышки 10 для выполнения этого.
Поступательное перемещение позволяет легко отсоединить модуль 14 питания, используя перемещение, которое является простым для оператора. Кроме того, выбор поступательного перемещения обеспечивает возможность уменьшения до минимума объема пространства 16, предназначенного для размещения модуля 14 питания. В заключение, оператор может легко проверять то, что модуль 14 питания отсоединен, просто посредством визуальной проверки положения модуля.
Такой коммутационный аппарат 2, следовательно, обеспечивает легкое отсоединение модуля 14 питания, и в таком случае обеспечивает возможность его поддерживания в первом отсоединенном положении. Первое отсоединенное положение дополнительно соответствует только частичному извлечению модуля 14 питания из корпуса 12, исключая какую-либо потерю или повреждение модуля 14 питания во время тестов. Такой коммутационный аппарат 2, следовательно, облегчает выполнение электрических тестов, которые требуют отсоединения модуля 14 питания.
Кроме того, коммутационный аппарат 2 в соответствии с изобретением предотвращает извлечение модуля 14 питания, если только крышка 10 не была снята. Кроме того, коммутационный аппарат 2 является более безопасным тем, что он обеспечивает возможность извлечения модуля 14 питания только операторами, имеющими квалификацию для снятия крышки 10.
В качестве альтернативы, язычок 30 имеется на боковой стенке корпусного пространства 16. Корпус 12, следовательно, содержит тяговый элемент (не изображен), способный вызывать деформацию язычка 30 по направлению наружу корпуса 12. Первое отверстие 34, второе отверстие 36 и паз 38, в таком случае, имеются на модуле 14 питания. Остальная часть коммутационного аппарата 2 не изменяется.
В соответствии с этой альтернативной формой, извлечение модуля 14 питания из корпуса 12 может выполняться оператором, прикладывающим к тяговому элементу силу, которая направлена наружу корпуса 12. Эта сила обеспечивает возможность расцепления стопорного выступа 28 от концевого стопора 40. Эта альтернативная форма варианта осуществления обеспечивает преимущество, заключающееся в том, что не требуется использовать дополнительный инструмент, например отвертку, для обеспечения возможности извлечения модуля 14 питания. Кроме того, нет необходимости обеспечения, в модуле 14 питания, объема, который позволяет язычку 30 деформироваться.
Таким образом, следует понимать, что расцепляющий механизм 6 в соответствии с изобретением обеспечивает легкое электрическое отсоединение модуля 14 питания и безопасность при выполнении электрических тестов.

Изобретение относится к расцепляющему механизму (6) для электрического коммутационного аппарата, содержащему защитный корпус (12), первые электрические соединительные контакты и модуль (14) питания, содержащий по меньшей мере один трансформатор и вторые входные и выходные контакты, способные соединяться с первыми соединительными контактами в соответствии с направлением соединения. Модуль (14) питания способен генерировать напряжение питания на основе входного напряжения, получаемого между вторыми входными контактами, и подавать напряжение питания между вторыми выходными контактами. Модуль (14) питания является подвижным относительно защитного корпуса (12). Техническим результатом является поддержание безопасности при выполнении электрических тестов. 2 н. и 9 з.п. ф-лы, 8 ил.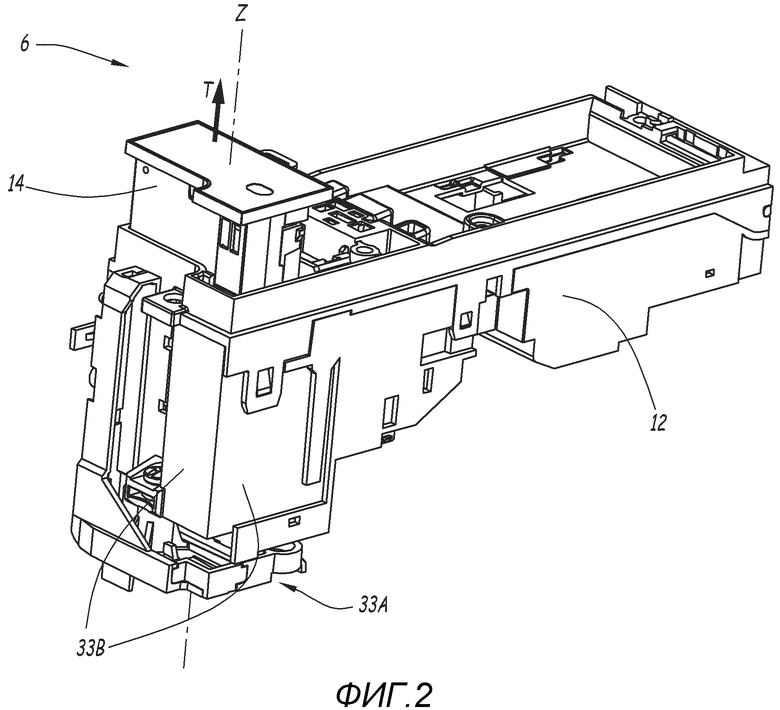
1. Расцепляющий механизм (6) для электрического коммутационного аппарата (2), содержащий:
- защитный корпус (12),
- первые электрические соединительные контакты, и
- модуль (14) питания, содержащий по меньшей мере один трансформатор и вторые входные и выходные контакты (22), способные соединяться с первыми соединительными контактами в соответствии с направлением соединения,
при этом модуль (14) питания выполнен с возмножностью генерирования напряжения питания на основе входного напряжения, получаемого между вторыми входными контактами, и подачи напряжения питания между вторыми выходными контактами,
отличающийся тем, что модуль (14) питания является подвижным относительно защитного корпуса (12).
2. Расцепляющий механизм (6) по п. 1, в котором модуль (14) питания является поступательно перемещаемым относительно защитного корпуса (12) в направлении соединения.
3. Расцепляющий механизм (6) по п. 1 или 2, в котором модуль (14) питания является удаляемым относительно защитного корпуса (12).
4. Расцепляющий механизм (6) по любому из пп. 1-3, в котором модуль (14) питания является подвижным между соединенным положением, в котором вторые контакты (22) соединены с первыми контактами, и по меньшей мере одним отсоединенным положением, в котором вторые контакты (22) отсоединены от первых соединительных контактов.
5. Расцепляющий механизм (6) по любому из пп. 1-4, причем расцепляющий механизм (6) дополнительно содержит средства (17) поддержания модуля (14) питания в по меньшей мере одном отсоединенном положении.
6. Расцепляющий механизм (6) по любому из пп. 1-5, причем расцепляющий механизм (6) дополнительно содержит защелкивающие средства (18), подвижные между положением защелкивания, в котором модуль (14) питания блокируется в соединенном положении, и расщелкнутым положением, позволяющим модулю (14) питания перемещаться из соединенного положения.
7. Расцепляющий механизм (6) по п. 6, в котором модуль (14) питания дополнительно содержит элементы (31) управления, предназначенные для перемещения защелкивающих средств (18) между их защелкнутым положением и их расщелкнутым положением.
8. Расцепляющий механизм (6) по п. 7, в котором элементы (31) управления прикреплены к захватываемому элементу (32), предназначенному для захвата оператором.
9. Расцепляющий механизм (6) по любому из пп. 1-8, причем расцепляющий механизм (6) дополнительно содержит стопорные средства (19), подвижные между стопорным положением, предохраняющим модуль (14) питания от извлечения из защитного корпуса (12), и свободным положением, обеспечивающим возможность извлечения модуля (14) питания из защитного корпуса (12).
10. Электрический коммутационный аппарат (2), такой как прерыватель цепи, содержащий расцепляющий механизм (6) по любому из пп. 1-9.
11. Электрический коммутационный аппарат (2) по п. 10, в котором расцепляющий механизм (6) представляет собой расцепляющий механизм по п. 9, и электрический коммутационный аппарат (2) дополнительно содержит основание (8) и защитную крышку (10), съемно прикрепленную к основанию (8), при этом крышка (10), когда прикреплена к основанию (8), закрывает стопорные средства (19) для предотвращения доступа к ним снаружи крышки (10).
| Устройство для соединения радио-элЕКТРОННыХ блОКОВ | 1979 |
|
SU843332A1 |
| Отсчетное устройство для механизма вертикальной подачи стола фрезерного станка | 1954 |
|
SU103038A1 |
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ С ТЕМПЕРАТУРНОЙ ЗАЩИТОЙ ДЛЯ ЭЛЕКТРОДВИГАТЕЛЯ | 1996 |
|
RU2120151C1 |
| КАССЕТЫ СО СКОБАМИ | 2015 |
|
RU2703506C2 |
| US 4673779 A, 16.06.1987. | |||

