Изобретение относится к области магнитных измерений пространственного распределения стационарных параметров геомагнитного поля (ГМП) и может использоваться, как для картирования стационарного магнитного поля Земли, так и составления карт геологических структур, служащих его постоянной основой. Способ может быть использован для измерения стационарных физических полей Земли и ее объектов, их положения в пространстве и размеров. Способ обладает контролем достоверности измерений, как полей, так и размеров и положений объектов в пространстве.
Известны способы градиентометрической съемки магнитного поля вдоль заданной траектории движения, включающие одновременные измерения параметров суммарного сигнала стационарного геомагнитного поля и поля вариаций в ряде точек по направлению движения датчиков, вычисления разностей параметров поля на базах измерений, и их интегрирования при движении по изолинии, находимой по показаниям системы навигации и разности показаний датчиков (аналог А.С. №1269672 от 08.07.86 г). По результатам измерений полученных разностей восстанавливают значения стационарного геомагнитного поля и строят карты пространственного распределения параметров магнитных полей и пространственного расположения источников этих полей. Недостатком указного способа и устройства является накопление ошибок интегрирования и сложность реализации движения по изолинии.
Наиболее близким по технической сущности является способ и устройство, заявленные в патенте США №3490032 от 13.01.70 г., которое является общим прототипом всех градиентометрических способов и устройств. Его основной недостаток заключается в накоплении ошибок в процессе интегрирования измеренных приращений.
Градиентометрической способ магнитной съемки параметров индукции стационарного геомагнитного поля (ГМП), включает буксировку на постоянном курсе двух первичных преобразователей, размещенных на известной базе, одновременно измеряющих параметры магнитного поля и привязывающих измеренные значения к месту с помощью системы координирования, включающей вычисление приращений параметров на базе измерений и восстановление параметров индукции стационарного поля путем интегрирования измененных приращений по пути движения.
Устройство для осуществления способа содержит дифференциальный магнитометр, первичные преобразователи которого расположены на известной базе по направлению движения и подключены к входу блока измерения, синхронизации и вычисления разности сигналов, и системы координирования, включающей логическое устройство хранения информации и интегратора приращений индукции стационарного поля.
Задачей заявляемого изобретения является повышение достоверности и точности градиентометрического способа измерений и устройства его реализующего при измерении параметров стационарного ГМП и расширения его возможностей путем достоверного определения линейных размеров формы объектов, создающих измеренные аномалии.
Решение указанной задачи достигается тем, что в известном градиентометрическом способе магнитной съемки параметров индукции стационарного геомагнитного поля (ГМП), включающего буксировку на постоянном курсе двух первичных преобразователей, размещенных на известной базе, одновременно измеряющих параметры магнитного поля и привязки измеренных значений к месту с помощью системы координирования, включающей вычисление приращений параметров на базе измерений и восстановление параметров индукции стационарного поля путем интегрирования измененных приращений по пути движения, дополнительно
- измеряют приращение параметров индукции в границах первичного преобразователя;
- вычисляют приращения параметров индукции на базе измерений (оценивают разрешающую способность измерений);
- выделяют точки с экстремальными значения измеряемых приращений параметров индукции ГМП и вычисляют скорость приращений параметров индукции между экстремальными значениями;
- вычисляют градиент приращения параметров индукции между точками с экстремальными значениями параметров индукции ГМП;
- восстанавливают линейным интегрированием параметры индукции стационарного ГМП между ними;
- определяют размеры и положение объектов, создающих измеренные аномалии.
Устройство для осуществления способа по п. 1 содержит дифференциальный магнитометр, первичные преобразователи которого расположены на известной базе по направлению движения, и подключены к входу блока измерения, синхронизации и вычисления разности сигналов, и системы координирования, включающей логическое устройство хранения информации и вычислителя, выполняющего интегрирование приращений индукции стационарного поля, в котором первичные магнитометрические преобразователи измеряют приращения параметров магнитного поля в границах преобразователя (относительные магнитометры), а вычислитель в процессе измерений выделяет точки с экстремальными значениями приращений параметров поля и вычисляет разности приращений параметров на базе измерений и между текущими экстремальными значениями приращений поля и пройденного пути между ними, определяя текущие значения градиента индукции стационарного поля, и восстанавливает индукцию стационарного ГМП, используя его линейное интегрирование между точками и дополнительно вычисляет положение и размеры источников, создающих измеренные аномалии.
Устройство для осуществления способа по п. 2, содержащее дифференциальный магнитометр, в котором в качестве первичных преобразователей используют абсолютные магнитометры, измеряющие модуль вектора индукции магнитного поля, а вычислитель в процессе измерений выделяет точки с экстремальными значениями приращений индукции на базе измерений и вычисляет градиент индукции стационарного поля по приращениям индукции между экстремальными значениями приращений и пройденного пути между ними.
Пример выполнения заявляемого изобретения.
Внешнее магнитное поле воздействует на измерители в границах его размеров, что обуславливает измерение его приращений в границах первичного преобразователя. В настоящее время магнитометрические преобразователи нормируют в мерах индукции, а для повышения разрешающей способности измерений часть поля компенсируют с помощью дополнительных устройств. К таким измерителям магнитного поля относят все относительные преобразователи, в которых индукция преобразуется в электромагнитный сигнал, например индукционные, феррозондовые. Чем больше размеры поверхности этих первичных преобразователей, тем больше уровень их сигнала, поэтому их показания необходимо нормировать их поверхностью. Но обычно длина преобразователя значительно превышает его диаметр или ширину, а их соотношение стандартизовано, поэтому их показания можно нормировать и их длиной. Относительные измерители магнитного поля измеряют не индукцию, а ее приращение на их длине.
Общепринято считают, что протонные и квантовые преобразователи, построенные на физических постоянных, преобразуют индукцию в частоту и измеряют «абсолютные» значения магнитного поля. Измерения «абсолютных» магнитометров нормируют в мерах измерений нТл/с1/2 или нТл/с, то есть нормируют временем или циклом измерений. Следовательно, «абсолютные» измерители оценивают приращение поля, которое действует между взаимодействующими поверхностями пространства в молекулах и атомах, происходящий за цикл преобразования или единицу времени. Так как размеры этих поверхностей неизвестны, то измеряемой величиной является градиент индукции магнитного поля между ними за цикл. Эти градиенты нормированы величиной индукции магнитного поля, а поверхности постоянны, поэтому общепринято считать, что они измеряют индукцию.
Таким образом, все первичные преобразователи магнитного поля измеряют приращения индукции в границах поверхностей преобразования, измеренных в линейных или временных границах.
Это позволяет при использовании двух измерителей, разнесенных на известной базе d, значительно превышающей размеры преобразователей, например в n=(102-106) раз, повысить их разрешающую способность измерений в тоже число раз:
Так при длине феррозондового преобразователя  и базе между ними d=100 м, разрешающую способность можно повысить в n=104 раз. При градиентометрических измерениях на базе в двух точках измеряются разные значения пространственного распределения магнитного поля Земли и одинаковые значения поля вариаций, что обеспечивает содержание в разности одновременных показаний преобразователей только информации о скорости приращений индукции ГМП на базе d.
и базе между ними d=100 м, разрешающую способность можно повысить в n=104 раз. При градиентометрических измерениях на базе в двух точках измеряются разные значения пространственного распределения магнитного поля Земли и одинаковые значения поля вариаций, что обеспечивает содержание в разности одновременных показаний преобразователей только информации о скорости приращений индукции ГМП на базе d.
При этом магнитное поле любого объекта измеряется на фоне больших по размеру объектов. Так магнитное поле локального объекта измеряется на фоне регионального поля, а оно на фоне главного поля Земли. Поля имеют градиенты, которые существенно изменяющиеся по своим значениям. Так градиенты локальных полей объектов могут достигать 105 нТл/м, а главное поле Земли, при диапазоне изменений индукции ±0,7⋅105 нТл на ее диаметре равном 12,6⋅106 м, имеет градиент порядка 10-2 нТл/м. Следовательно, вопрос восстановления стационарного ГМП состоит в обеспечении требуемой разрешающей способности измерений приращений магнитного поля и исключения накопления ошибок интегрирования.
«Относительные» магнитометрические преобразователи имеют диапазон измерений индукции порядка ±1-2 мкТл=1000-2000 нТл (диапазон компенсации индукции ±0,7⋅105 нТл). Разрешающая способность их измерений при длине 10 мм и диаметре 1 мм составляет величину от 1 до 0,1 нТл. Учитывая размеры преобразователей (10 мм) размещенных на базе 100 м, разрешающая способность измерения приращений составит величину порядка 10-4-10-5 нТл/м (увеличилась в n=104 раз). При этом их относительная стандартная неопределенность (погрешность) приращений магнитной индукции не превышает 3% или 3 ед. младшего разряда, то есть 3 нТл.
При использовании «абсолютных» магнитометров разрешающая способность их измерений составляет величину от 10-1 до 10-3 нТл во всем диапазоне индукции поля Земли (105 нТл) при цикле 1с. Учитывая диаметр колбы с резонирующим веществом порядка 10 мм при измерениях на базе порядка 100 м, разрешающая способность измерения приращений индукции может быть также повышена в 104 раз и достигнет 10-5-10-7 нТл/м. При этом относительная стандартная неопределенность (погрешность) приращений магнитной индукции не превышает 10-2 нТл.
Выделение границ объектов, обладающих магнитным полем, основано на выделении экстремальных значений параметров индукции, связанных с границами объекта, измеряемых магнитометрическими преобразователями. Измерение положения и размеров объектов связано с построением их образов в парной проективной системе координат на измерительной базе дифференциального магнитометра, и их вычислений в соответствии с патентом РФ №26525612.
Измеряя текущие значения приращений параметров стационарного магнитного поля Земли, связанных с граничными размерами геологических объектов, фиксируют их экстремальные значения и положение в пространстве. Сравнивают разности показаний первичных преобразователей на базе измерений с разностью их показаний в точках на участке, связанных экстремальными значениями приращений, вычисляют среднюю оценку приращений на участке и текущую их разность. Восстанавливают линейным интегрированием приращения параметров между экстремальными значениями на каждом участке.
При использовании относительных измерителей измеряют приращение поля в границах первичного преобразователя, поэтому сначала восстанавливают линейным интегрированием приращение на базе измерений, обеспечивая повышение разрешающей способности в n раз. Затем восстанавливают значения приращений индукции стационарного ГМП, но на расстояниях между экстремальными значениями измеренных приращений, которые изменяются в зависимости от размеров создающих их объектов и расстояния до них и значительно больше размера базы, например в N=Li/d раз. При этом разрешающая способность оценки приращений индукции возрастает в N раз, обеспечивая постоянство ее абсолютной оценки на участке произвольной длины равной относительной погрешности измерений преобразователя. Для восстановления индукции стационарного ГМП необходимо выполнить повторное интегрирование при сохранении постоянной абсолютной погрешности измерений приращений между точками интегрирования на базе равной относительной стандартной неопределенности преобразователя, не превышающей 5 нТл/базу. Погрешность накапливается только от различий дрейфа нуля первичных преобразователей.
При использовании «абсолютных» преобразователей их разность определяет приращение индукции на базе измерений или градиент приращений поля.
Интегрирование градиентов приращений поля на базе по курсу движения выполняется линейно на участках, ограниченных их экстремальными значениями. Поэтому накопление погрешностей не происходит. Процесс выполнения измерений приращений индукции стационарного ГМП на участке произвольной длины показан на фиг. 1. Ось Х - нормирована в единицах длины, ось Y - в нТл, но может быть нормирована и в м. Для измерения приращений индукции на базе по оси Y использована дополнительная шкала 0,1 нТл/базу, текущие измерения которых отображены точками. Интегрирование можно выполнять по любому пути, показанному лучами, соединяющими произвольные экстремальные точки, что является дополнительным контролем достоверности выполненных измерений и вычислений.
Для повышения достоверности выполненных измерений и решения других задач определяют положение (Yi, Xi) и размеры (ai, bi) источников аномального магнитного поля, границы которого выделены экстремальными значениями приращений измеряемых параметров (фиг. 2). Характерной особенностью градиентометрической съемки является получение двух образов объекта с одного ракурса, ограниченных экстремальными значениями приращения магнитного поля. Это обеспечивает возможность использования парных проективных измерений для определения необходимых равенств и отличий полученных образов геологических объектов, величины которых линейно связаны с соответствующими размерами парного измерителя и его отстоянием от выделенных точек геологических объектов. Аналитические вычисления положения и размеров объекта выполняются по патенту РФ №26525612.
Устройство для осуществления способа, показанное на фиг. 2, работает следующим образом. С первичных преобразователей 1 и 2 снимаются приращения параметра вектора индукции магнитного поля (ΔT1) и (ΔТ2) и поступают на вход блока синхронизации и измерения 3, обеспечивающего выделение точек с экстремальными значениями приращений измеряемых параметров поля и вычисления разностей параметров между ними. Одновременно в блок 3 поступает информация с системы координирования 4 для вычисления пройденного расстояния между точками. В блоке 3 выделяются точки (i) с экстремальными значениями результатов измерений (ΔТ1)di max, (ΔТ1)di min, между которыми на каждом участке оцениваются их разность Δ(ΔT)i. Эти точки i привязывают к информации, получаемой из системы координирования 4, вычисляя расстояние между точками измерений ΔLi:
Δ(ΔT)i=(ΔT1i-ΔT2i);


ΔLi=(L1i-L2i).
Где d - база измерений;  - размер первичного преобразователя; ΔLi - расстояние между выделенными точками (i).
- размер первичного преобразователя; ΔLi - расстояние между выделенными точками (i).
Из блока 3 информация поступает в блок хранения информации 5, в котором вычисляются текущие значения приращений градиента Δgi стационарного поля между выделенными точками и контролируют среднюю оценку приращений градиента Δgicp на участке. Их совпадение является основой выполнения следующих операций линейного интегрирования, как приращений градиента для оценки текущих значений градиента, так и градиента для оценки значений индукции стационарного ГМП Ti:


Где ToN - значение модуля вектора индукции в точке 0 на участке Ni.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известны способ и технические устройства, в которых управляют изменением разрешающей способности измеряемых параметров для обеспечения достоверности оценки измеряемых параметров. Способ обеспечивает детерминированное восстановление любого измеряемого стационарного параметра поля Земли без влияния изменений параметров окружающей среды (вариаций, солености, помех и т.д.) с заданной геометрической точностью и достоверностью, путем управления разрешающей способностью, что опирается на уточнение измеряемые параметры измерителей и выделяемые параметры объектов.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций повышает точность и достоверность измерений объектов.
Предлагаемое техническое решение промышленно применимо и обосновывает необходимость использования нано технологий в измерительных процессах при использовании стандартных устройств, оборудования и приспособлений.
Технико-экономическая эффективность заявленного способа заключается в возможности исключения понятий вероятности и неопределенности из процесса измерений.
Список используемой литературы:
1. А.С. №1269672 «Способ магнитной съемки и устройство для его осуществления» от 08.07.86 г.
2. Патент США №3490032 от 13.01.70 г
3. Патент РФ №26525612 ««Стереоскопический способ измерений отстояний и формы объектов»
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2007 |
|
RU2331090C1 |
| Способ определения девиационной поправки при морской магнитной съемке | 1982 |
|
SU1073607A1 |
| СПОСОБ МОРСКОЙ ВЫСОКОТОЧНОЙ МАГНИТНОЙ СЪЕМКИ | 2015 |
|
RU2665355C2 |
| Компонентный дифференциальный магнитометр | 1978 |
|
SU739454A1 |
| Стереоскопический способ определений положения и формы объектов с контролем достоверности | 2017 |
|
RU2655612C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ ЭФФЕКТА ГЕОМАГНИТНОЙ ПСЕВДОБУРИ | 2013 |
|
RU2526234C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431154C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА КОРАБЛЯ НА АКВАТОРИИ БАЗЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2356013C2 |

Группа изобретений относится к области магнитных измерений пространственного распределения стационарных параметров геомагнитного поля (ГМП) и может использоваться как для картирования стационарного магнитного поля Земли, так и составления карт геологических структур, служащих его постоянной основой. Градиентометрический способ магнитной съемки параметров индукции стационарного геомагнитного поля (ГМП) дополнительно включает этапы, на которых измеряют приращение параметров индукции в границах первичного преобразователя; вычисляют приращения параметров индукции на базе измерений; выделяют точки с экстремальными значениями измеряемых приращений параметров индукции ГМП и вычисляют скорость приращений параметров индукции между экстремальными значениями; вычисляют градиент приращения параметров индукции между точками с экстремальными значениями параметров индукции ГМП; восстанавливают линейным интегрированием параметры индукции стационарного ГМП между ними; определяют размеры и положение объектов, создающих измеренные аномалии. Технический результат – повышение точности и достоверности измерения объектов. 2 н. и 1 з.п. ф-лы, 2 ил.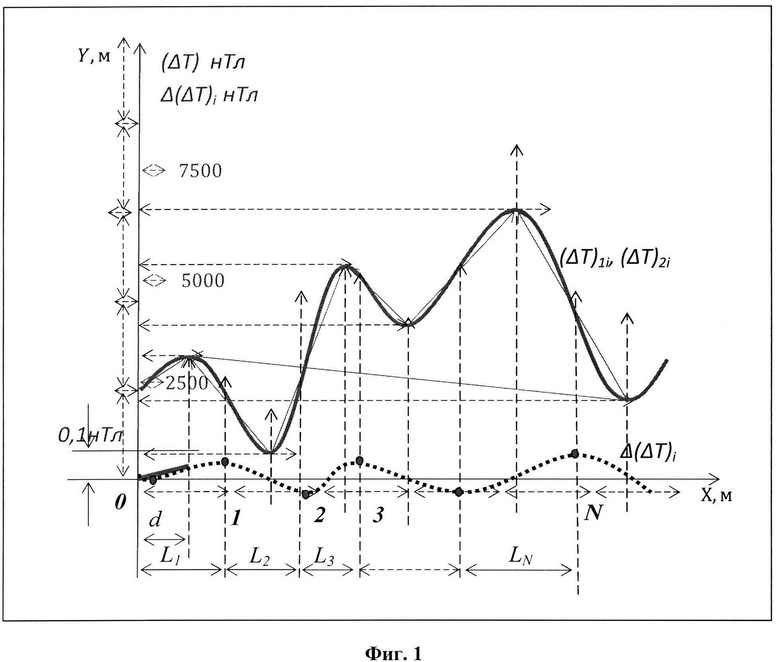
1. Градиентометрический способ магнитной съемки параметров индукции стационарного геомагнитного поля (ГМП), включающий буксировку на постоянном курсе двух первичных преобразователей, размещенных на известной базе, одновременно измеряющих параметры магнитного поля и привязки измеренных значений к месту с помощью системы координирования, включающий вычисление приращений параметров на базе измерений и восстановление параметров индукции стационарного поля путем интегрирования измененных приращений по пути движения, отличающийся тем, что
- измеряют приращение параметров индукции в границах первичного преобразователя;
- вычисляют приращения параметров индукции на базе измерений;
- выделяют точки с экстремальными значениями измеряемых приращений параметров индукции ГМП и вычисляют скорость приращений параметров индукции между экстремальными значениями;
- вычисляют градиент приращения параметров индукции между точками с экстремальными значениями параметров индукции ГМП;
- восстанавливают линейным интегрированием параметры индукции стационарного ГМП между ними;
- определяют размеры и положение объектов, создающих измеренные аномалии.
2. Устройство для осуществления способа по п. 1, содержащее дифференциальный магнитометр, первичные преобразователи которого расположены на известной базе по направлению движения и подключены к входу блока измерения, синхронизации и вычисления разности сигналов, и систему координирования, включающую логическое устройство хранения информации разностей параметров и координат, и вычислитель, выполняющий интегрирование приращений индукции стационарного поля, отличающееся тем, что первичные магнитометрические преобразователи измеряют приращения параметров магнитного поля в границах преобразователя (относительные магнитометры), а вычислитель в процессе измерений выделяет точки с экстремальными значениями приращений параметров поля и вычисляет разности приращений параметров на базе измерений и между текущими экстремальными значениями приращений поля и пройденный путь между ними, определяя текущие значения градиента индукции стационарного поля, и восстанавливает индукцию стационарного ГМП, используя его линейное интегрирование между точками и дополнительно вычисляет положение и размеры источников, создающих измеренные аномалии.
3. Устройство для осуществления способа по п. 2, содержащее дифференциальный магнитометр, в котором в качестве первичных преобразователей используют абсолютные магнитометры, измеряющие модуль вектора индукции магнитного поля, а вычислитель в процессе измерений выделяет точки с экстремальными значениями приращений индукции на базе измерений и вычисляет градиент индукции стационарного поля по приращениям индукции между экстремальными значениями приращений и пройденного пути между ними.
| US 3490032 A1, 13.01.1970 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2007 |
|
RU2331090C1 |
| RU 2009111833 A, 10.10.2010 | |||
| US 5543714 A1, 06.08.1996 | |||
| WO 2015013499 A1, 29.01.2015. | |||

