Изобретение относится к локационным способам и средствам измерения глубин морских акваторий с помощью эхолотов.
Эхолокация дна моря относится к виду локационных измерений, в которых излучаемое «наблюдателем» электромагнитное поле звукового диапазона воздействует на объект наблюдения и, отражаясь от поверхности дна, возвращается к «наблюдателю». Наблюдатель по измерению времени, затраченному на перемещение сигнала между «наблюдателем» и поверхностью дна, и оценке скорости распространения звуковых колебаний в воде вычисляет расстояние между ними [1]. Использование ряда измерителей, находящихся на известной базе, или сканирующего излучателя позволяет измерять глубины, расположенные на траверсе движения судна по ширине облучения [1-3]. Модель измерения глубин по результатам измерений времени рассматривается в системе координат Декарта XYZ, численное решение которой выполняется итерационными способами, один из которых интерферометрический [3]. Это указывает на то, что существующие модели локационных измерений используют ряд допущений, вызывающих трансформируемые погрешности, а существующие способы локационных измерений, построенные на этих моделях, являются приближенными.
Метрическое обеспечение измерений глубин строится на выделении отдельных точек-глубин под судном, соединении их прямыми линиями с излучателем - приемником и их масштабировании. Однако перед выполнением этих операций необходимо доказать, что реальная линия движения электромагнитного поля, соединяющая указанные точки, является прямой. Это положение не доказывается, а допускается, что приводит к первой трансформируемой методической погрешности измерений.
Вторая методическая погрешность измерения глубин связана со скоростью прохождения звука в слоях воды [1]. Для определения скорости звука в слоях воды используют специальное устройство, выполняющее дискретные измерения в отдельных точках на площади съемки. Однако скорость распространения звука в воде зависит от времени и координат. Поэтому разнесение по времени и пространству определения глубины и скорости звука не исключает погрешность и не устраняет ее зависимость от времени и координат, а только уменьшает ее. Это вторая трансформируемая погрешность.
Известен также эхолот [1, 2] для осуществления способа определения глубин в точке облучения дна, содержащий излучатель поля по заданным направлениям, приемник, для приема отраженного от дна сигнала, измеритель длительности, опорный генератор и вычислитель с регистратором, при этом выходы излучателя, приемника и опорного генератора подключены к входам измерителя длительности, выход которого подключен к вычислителю.
Основным недостатком известного способа и эхолота является не достаточно высокая точность, обусловленная изменениями скорости распространения электромагнитного поля из-за влияния среды и ограничений угла сканирования пространства из-за роста погрешности боковых измерений. В результате погрешность определения расстояния от объекта до источника электромагнитного поля при использовании известных способа и эхолота достигает величин, превышающих требования. Ограничения по углу сканирования пространства уменьшает производительность и увеличивает стоимость промерных работ.
Целью заявляемого изобретения является повышение точности измерения глубин при снятии ограничений по углу сканирования эхолота.
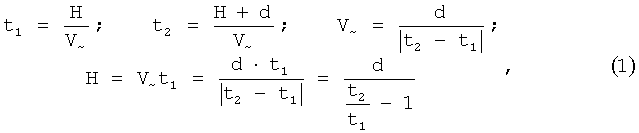
Указанная цель достигается тем, что в известном способе определения расстояния от объекта до источника электромагнитного поля путем излучения электромагнитного поля звукового диапазона в направлении дна, приема отраженного сигнала, измерения промежутка времени между моментом излучения до момента приема сигнала и вычисления по полученным результатам глубины измеряют промежутки времени приема сигнала в двух точках, расположенных на известном отстоянии по вертикали, фиксируя их по двум любым совпадающим отличиям в форме сигналов, например экстремальным значениям, а глубину (Н) вычисляют по формуле:
 ,
,
где Н - глубина точки облучения дна от первого измерителя;
d - отстояние по вертикали между точками измерений;
t1, t2 - промежутки времени между моментом излучения до момента приема сигналов в точках измерений по совпадающим отличиям в форме сигналов.
Поставленная цель достигается также тем, что известный эхолот, содержащий излучатель поля по заданным направлениям, приемник, для приема отраженного от дна сигнала, измеритель длительности между излучением и приемом сигнала, опорный генератор и вычислитель с регистратором, при этом выходы излучателя, приемника и опорного генератора подключены к входам измерителя длительности, выход которого подключен к вычислителю, приемник снабжен двумя антеннами, расположенными по вертикали на известной базе d и подключенными к измерителю длительности, снабженному дискриминатором особых точек сигнала, база приемных антенн установлена вертикально на стабилизированной платформе, а частотой опорного генератора управляют в зависимости от измеряемой глубины и требуемой точности ее измерений, по формуле:
 ,
,
где F - частота опорного генератора;
V - средняя скорость распространения звука в воде;
Н, Δ - глубина и требуемая погрешность ее измерения.
Пример выполнения заявляемого изобретения
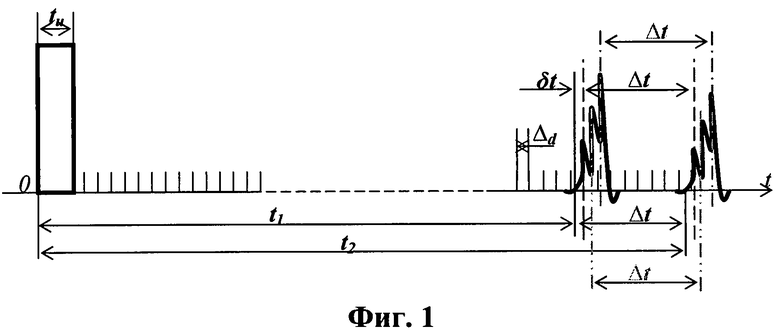
На фиг.1 показано измерение промежутков времени между моментом излучения до момента приема сигналов.
На фиг.2 приведена структурная блок-схема заявленного эхолота.
Заявленный способ реализуется эхолотом, структурная блок-схема которого показана на фиг.2. Эхолот содержит излучатель 1, приемный блок 2, блок измерения длительности 3, опорный генератор 4, вычислительный блок с регистратором 5.
При этом выходы излучателя 1, приемного блока 2 и опорного генератора 4 подключены к входам блока измерения длительности 3, выход которого подключен к входу вычислителя 5 для определения глубины в точке падения луча излучателя электромагнитного поля.
Излучатель выполнен в виде элемента, допускающего излучение электромагнитного поля заданного частотного диапазона, требуемой мощности, с требуемой диаграммой направленности в заданном плоскостном, сканирующем угле. Излучатель установлен в известном положении относительно базы приемного устройства, а его выход подключен к блоку измерения длительности 3.
Приемный блок 2 выполнен в виде жесткой базы 6, заданной по вертикали длины d, на концах которой закреплены приемные антенны 7 и 8, например магнитострикционные. База 6 закреплена на стабилизированной в горизонте платформе, в качестве которой может быть использован карданов подвес 9. Выходы антенн 7 и 8 соединены с приемоизмерительным блоком 2, выход которого подключен к блоку измерения длительности 3.
Блок измерения длительности 3 включает устройство линейной развертки 10 и дискриминатор 11.
Эхолот работает следующим образом, показанным на фиг.1.
Электромагнитное поле звукового диапазона излучается в заданном направлении, заданном плоскостью сканирования Z0Y. В момент посылки сигнала излучатель 1 выдает сигнал в блок измерения длительности 3.
Электромагнитное поле, воздействуя на поверхность дна, отражается. При этом из-за различных свойств грунта форма отраженного сигнала искажается. Отраженный сигнал может распространяться по любой произвольной траектории к приемным антеннам 7 и 8 и поочередно воздействует на них. Траектории движения лучей, отраженных от дна и идущих к антеннам 7 и 8, могут быть произвольными, но они имеют две составляющих по осям Y и Z. Составляющие лучей по оси Y будут равны, а составляющие по оси Z будут отличаться на постоянную линейную величину, заданную базой d, например d=1 м. Тогда разность путей движения лучей к приемным антеннам 7 и 8 определяется только одной составляющей - d. Независимо от точки облучения поверхности дна разность времен прихода сигналов будет характеризовать градиент поля глубин по направлению базы [1, 4]. При этом влияние скорости звука на результаты измерений глубин отсутствует:
где V~ - оценка переменной скорости по пути движения луча;
t1, t2 - промежутки времени от момента излучения до приема сигналов приемными антеннами 7 и 8.
В соответствии с выражением (1) независимо от положения освещаемой поверхности дна определяемое значение будет всегда оценивать отстояние поверхности по вертикали от приемной антенны, принятой за опорную, или глубину (при учете заглубления приемных антенн). Так как (t2-t1)/d=Δt/d является оценкой градиента времени по направлению вертикали на размере базы, то его деление времени движения сигнала на градиент всегда будет характеризовать оценку глубины. Относительная погрешность измерения глубины при вертикальном расположении измерительной базы ε(Н) равна:

где Δt - отсчетная точность измерения времени на оси Z;
ε(Н) - требуемая относительная погрешность измерения глубин.
Однако в выражении (2) ε(Δt)>>ε(t1) никакой оценки глубины без учета этой особенности выполнить невозможно.
Для оптимизации погрешности измерения глубин необходимо обеспечить равные относительные погрешности измерения времени прохождения базы ε(Δt) и глубины ε(Н), что обеспечивается при ε(Δt)=ε(Н).
Это требует задания необходимой дискретности измерений времени Δd при прохождении лучом базы d между приемными антеннами 7 и 8, то есть:
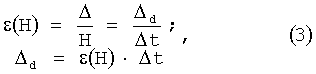
где Δt=t2-t1 - отрезок времени прохождения лучом базы или разность времен прохода сигнала между приемными антеннами 7 и 8.
Так, например, при базе между антеннами d=1 м и измерении глубин в диапазонах Н1>102 м и Н2>103 м с разрешающей способностью Δ=0,1 м относительная погрешность измерения глубин равна ε(Н1)=10-3, ε(Н2)=10-4.
Зададим скорость распространения звука в воде V≈103 м/c, при этом время от излучения до приема сигнала при глубине H1 равна: t1≈0,1 с, при глубине Н2 равна: t2≈1 с, тогда цена деления измерений времени прохождения лучом базы Δd(Н) должна быть равна:
 .
.
В этом случае частота опорного генератора (F), задающего дискретность измерений времени Δd (фиг.1), должна устанавливаться в соответствии с требуемой разрешающей способностью измерений глубин и размером базы и определяется по формуле:

Частота опорного генератора для обеспечения разрешающей способности Δ=±0,1 м на глубинах:
Н<102 м должна составлять F(H1)=106 Гц=1 МГц.
Н<103 м должна составлять F(H1)=107 Гц=10 МГц.
Излучение электромагнитного поля в направлении дна осуществляется импульсами, а отраженный сигнал имеет множество искажений, вызванных особенностями облучаемой поверхности, которые показаны на фиг.1. При этом передний фронт отраженного импульса не всегда характерно выражен. В блоке измерения длительности 3 принимаемые сигналы с помощью устройства линейной развертки 10 отображаются на линии развертки совместно с метками опорного генератора. Если принимаемые антеннами 7 и 8 сигналы совпадают по форме и отличаются только временем прихода, то дискриминатор 11 выделяет их характерные особые точки, которые служат границами прихода сигналов, например, методом их дифференцирования. Величину Δt оценивают по фиксации разности времен для двух любых совпадающих отличий в форме сигналов. Относительная погрешность оценки промежутка времени между излучением и приемом сигналов (δt), обусловленная смещением начала отсчета принимаемых сигналов, вызывает изменение только оценки t1 и не превышает относительной погрешности оценки времени приема сигнала или глубины, то есть:

Измерение временных параметров t1, t2 происходит для приведенного примера со сдвигом менее 1 mc. Поэтому к опорному генератору предъявляется требование по стабильности частоты только на время измерений разности времен - Δt=1 mc. Следовательно, требования по стабильности частоты опорного генератора в эхолоте практически отсутствуют.
Таким образом, заявляемые способ и устройство обеспечивают измерения глубин независимо от точки облучаемой поверхности дна относительно источника электромагнитного поля при условии обеспечения заданной точности. Это существенно расширяет полосу измерений, что обеспечивает снижение стоимости выполнения промерных работ.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ и устройство определения глубин в любой точке облучаемого пространства относительно источника электромагнитного поля, а также управляющего точностью измерения глубин в соответствии с поставленными требованиями.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций и устройство для его осуществления повышает точность измерения глубин в произвольной точке облучаемой поверхности дна.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартные устройства, оборудование и приспособления, используемые для измерения электромагнитных полей.
Технико-экономическая эффективность заявленного способа и устройства заключается в возможности управления точностью определения глубин при расширении полосы измерений.
Использованная литература:
1. Н.И.Федоров. Эхолоты и другие гидроакустические средства. Курс кораблевождения. Книга 4. Ленинград: Упр. Начальника гидрографической службы ВМФ. 1960 г. - 360 с.
2. А.И.Хребтов. Судовые эхолоты. Л.: Судостроение. 1982. - 232 с.
3. В.И.Каевицер (ИРЭ РАН) и другие. «Дистанционные акустические измерения плотности трехмерной среды на основе фазовых измерений эхосигналов // VI Российская научно-техническая конференция «Современное состояние и проблемы навигации и океанографии» НО-2007, с.335-338.
4. С.Н.Гузевич. «О косвенных методах геометрических измерений» // Электронный журнал «Прикладная геометрия» (МАИ), выпуск 10, №21 (2008), с.29-38.
5. С.Н.Гузевич. «Косвенные измерения и условия их выполнения» // Электронный журнал «Прикладная геометрия» (МАИ), выпуск 11, №23 (2009), с.1-22.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ОТНОСИТЕЛЬНО ИСТОЧНИКА ЭЛЕКТРОМАГНИТНОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2490663C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ПРИЕМНИКА ЭЛЕКТРОМАГНИТНОГО ПОЛЯ НА ОБЪЕКТЕ ДО ПЕРЕДАТЧИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2413240C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614854C2 |
| Стереоскопический способ определений положения и формы объектов с контролем достоверности | 2017 |
|
RU2655612C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории | 2018 |
|
RU2694084C1 |
| ОПТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ РАЗМЕРОВ И ПОЛОЖЕНИЯ ОБЪЕКТА И ДАЛЬНОМЕР-ПЕЛЕНГАТОР | 2013 |
|
RU2533348C1 |
| СТЕРЕОСКОПИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЙ И СУДОВОЙ ДАЛЬНОМЕР-ПЕЛЕНГАТОР | 2011 |
|
RU2468336C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2009 |
|
RU2461021C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
Изобретение относится к локационным способам и средствам измерения глубин морских акваторий с помощью эхолотов. Техническим результатом является повышение точности измерений расстояний по направлению, заданному базой между источником электромагнитного поля и объектом. Повышение точности измерений расстояний достигается за счет оценки двух промежутков времени прохождения лучом от облучаемого объекта до двух приемных антенн, разнесенных на известной базе по заданному направлению, при этом относительная погрешность измерения времени прохождения лучом базы равна требуемой относительной погрешности измерений расстояний. Способ измерения глубины в точке облучения осуществляют путем излучения электромагнитного поля звукового диапазона в направлении дна, приема отраженного сигнала, измерения промежутка времени между моментом излучения до момента приема сигнала и вычисления по полученным результатам глубины. При этом направляют излучаемое поле в различные точки дна, измеряют промежутки времени в двух точках, расположенных на известном расстоянии по вертикали, фиксируя их по двум любым совпадающим отличиям в форме сигналов, например экстремальным значениям, а глубину вычисляют. Дополнительно предложено устройство для осуществления способа. 2 н.п. ф-лы, 2 ил.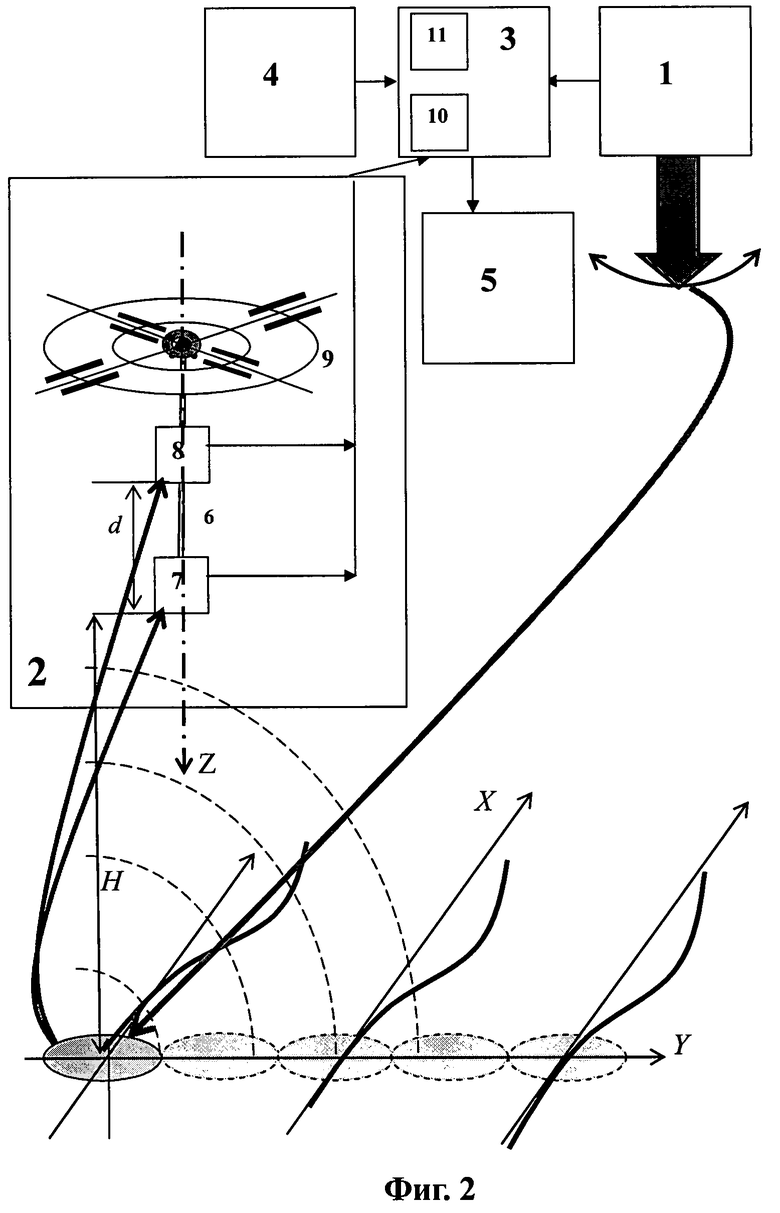
1. Способ измерения глубины в точке облучения путем излучения электромагнитного поля звукового диапазона в направлении дна, приеме отраженного сигнала, измерении промежутка времени между моментом излучения до момента приема сигнала и вычисления по полученным результатам глубины, отличающийся тем, что, с целью повышения точности и расширения возможности способа, направляют излучаемое поле в различные точки дна, измеряют промежутки времени в двух точках, расположенных на известном отстоянии по вертикали, фиксируя их по двум любым совпадающим отличиям в форме сигналов, например экстремальным значениям, а глубину (Н) вычисляют по формуле:
 ,
,
где Н - глубина точки облучения дна от первого измерителя;
d - отстояние по вертикали между точками измерений;
t1, t2 - промежутки времени между моментом излучения до момента приема сигналов в точках измерений по совпадающим отличиям в форме сигналов.
2. Эхолот для осуществления способа определения глубин в точке облучения дна, содержащий излучатель, приемник для приема отраженного от дна сигнала, измеритель длительности, опорный генератор и вычислитель с регистратором, при этом выходы излучателя, приемника и опорного генератора подключены к входам измерителя длительности, выход которого подключен к вычислителю, отличающийся тем, что, с целью повышения точности измерений, приемник эхолота снабжен двумя антеннами, расположенными по вертикали на известной базе d и подключенными к измерителю длительности, снабженному дискриминатором особых точек сигнала, а частотой опорного генератора управляют в зависимости от измеряемой глубины и требуемой точности ее измерений, по формуле:
где F - частота опорного генератора;
V - средняя скорость распространения звука в воде;
Н, Δ - глубина и требуемая погрешность ее измерения.
| Способ определения глубин акватории фазовым гидролокатором бокового обзора и фазовый гидролокатор бокового обзора для его осуществления | 1991 |
|
SU1829019A1 |
| Прибор для определения морских глубин | 1972 |
|
SU472315A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272303C1 |
| CN 2852285 Y, 27.12.2006 | |||
| JP 6300840 A, 28.10.1994. | |||

