ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к области магниторезонансной (МР) томографии. Оно касается способа МР томографии. Изобретение также относится к МР томографу и к компьютерной программе, выполняемой на МР томографе.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В настоящее время широко используются способы магниторезонансной томографии на основе взаимодействия между магнитными полями и ядерными спинами для формирования двумерных и трехмерных изображений, особенно в области медицинской диагностики, поскольку для визуализации мягких тканей эти способы по множеству аспектов имеют решающее преимущество по сравнению с другими способами визуализации, так как для них не требуется ионизирующее излучение и обычно они являются неинвазивными.
Согласно способу МР тело обследуемого пациента обычно помещают в сильное однородное магнитное поле (В0 поле), направление которого в то же время определяет ось (обычно z-ось) системы координат, на которой основаны измерения. Это магнитное поле создает разные энергетические уровни для отдельных ядерных спинов в зависимости от интенсивности магнитного поля, которые могут быть возбуждены (спиновый резонанс) посредством приложения переменного электромагнитного поля (РЧ поле, также называемое В1 полем) определенной частоты (называемой также ларморовой частотой или МР частотой). С макроскопической точки зрения распределение отдельных ядерных спинов порождает общее намагничивание, которое может отклоняться от состояния равновесия путем приложения электромагнитного импульса соответствующей частоты (РЧ импульс), так что намагничивание осуществляет прецессионное движение относительно z-оси. Это прецессионное движение описывает поверхность конуса, угол апертуры которого называется углом наклона вектора. Величина угла наклона вектора зависит от интенсивности и длительности приложенного электромагнитного импульса. В случае так называемого 90° импульса спины отклоняются от z-оси к поперечной плоскости (угол наклона вектора составляет 90°).
По окончании РЧ импульса намагниченность релаксирует до исходного состояния равновесия, в котором намагниченность в z- направлении отстраивается снова с первой постоянной T1 времени (время спин-решеточной или продольной релаксации), а намагниченность в направлении, перпендикулярном z-направлению, релаксирует со второй постоянной Т2 времени (время спин-спиновой или поперечной релаксации). Изменение намагниченности можно обнаружить с помощью одной или более приемных РЧ катушек, которые расположены и ориентированы в исследуемом объеме МР томографа так, что изменение намагниченности измеряют в направлении, перпендикулярном z-оси. Затухание поперечной намагниченности сопровождается после приложения, например, 90° импульса, переходом ядерных спинов (наведенных неравномерностью локального магнитного поля) из упорядоченного состояния с одной и той же фазой в состояние, где фазовые углы распределены неравномерно (расфазировка). Расфазировку можно скомпенсировать с помощью дефокусирующего импульса (например, 180° импульса). Это порождает эхо-сигнал (спиновое эхо) в приемных катушках.
Для реализации пространственного разрешения в исследуемом теле градиенты линейного магнитного поля, направленные вдоль трех главных осей, накладывают на однородное магнитное поле, что предопределяет линейную пространственную зависимость от частоты спинового резонанса. Тогда сигнал, снятый в приемных катушках, содержит компоненты различных частот, которые могут быть связаны с разными местоположениями в исследуемом теле. Данные МР сигнала, полученные с помощью радиочастотных катушек, соответствуют пространственной частотной области и называются данными k-пространства. Данные k- пространства обычно включают в себя множество строк, получаемых с использованием дифференциального фазового кодирования. Каждую строку оцифровывают путем сбора нескольких отсчетов. Набор данных k-пространства преобразуют в МРТ-изображение с помощью преобразования Фурье или других подходящих алгоритмов реконструкции.
Магниторезонансная томография тканей, таких как кости или легочные ткани, с очень короткими временами поперечной релаксации становится все более важной. В известных способах с этой целью в качестве основы используют трехмерное (3D) радиальное взятие отсчетов k-пространства. В способе с так называемой «нулевой эхо-задержкой» (ZTE) перед возбуждением магнитного резонанса устанавливают градиент считывания с помощью широкополосного и, следовательно, короткого РЧ импульса. Таким образом, градиентное кодирование запускается немедленно за возбуждением магнитного резонанса. Получение сигнала спада свободной индукции (FID) начинается сразу после излучения РЧ импульса, что приводит к фактической нулевой «эхо-задержке» (TE). После считывания FID сигнала потребуется лишь минимальное время для настройки следующего градиента считывания, прежде чем может быть подан следующий РЧ импульс, что позволяет получить очень короткие времена повторения (TR). Направление считывания пошагово изменяют от одного повторения к другому, пока не будет достигнута требуемая степень дискретизации сферического объема в k-пространстве. Учитывая отсутствие необходимости отключения градиента считывания между TR интервалами, формирование изображений с ZTE может выполняться практически «бесшумно» (смотри Weiger et al, Magnetic Resonance in Medicine, vol. 70, p.328-332, 2013).
Проблема, связанная с ZTE визуализацией, состоит в том, что данные k-пространства являются не совсем полными в центре k-пространства из-за начального запаздывания, вызванного конечной длительностью РЧ импульса, переключением «прием-передача», а также фильтрацией сигнала.
Указанный пробел в данных в k-пространства можно устранить, например, путем объединения радиального ZTE взятия отсчетов с дополнительным декартовым взятием отсчетов в центральной части k-пространства, как это делается в известном способе PETRA (смотри Grodzki et al Magnetic Resonance in Medicine, vol. 667, p.510-518, 2012).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Исходя из вышеизложенного, очевидно, что имеется потребность в усовершенствованном способе ZTE визуализации. Задача настоящего изобретения состоит в обеспечении условий для «скрытой» ZTE визуализации с взятием отсчетов центра k-пространства.
Согласно изобретению раскрыт способ МР томографии объекта, помещенного в исследуемый объем MР томографа. Способ согласно изобретению содержит этапы:
воздействие на объект визуализирующей последовательностью РЧ импульсов и переключаемых градиентов магнитного поля, при этом визуализирующая последовательность представляет собой последовательность с нулевой эхо-задержкой, содержащую:
i) настройку градиента считывания магнитного поля, имеющего направление считывания и интенсивность считывания;
ii) излучение РЧ импульса при наличии градиента считывания магнитного поля;
iii) получение FID сигнала при наличии градиента считывания магнитного поля, при этом FID сигнал представляет радиальный отсчет k-пространства, при этом получение FID сигнала начинают уже во время простоя приемника, то есть, во время получения, при котором коэффициент усиления приемника MР томографа еще не стабилизировался после излучения РЧ импульса;
iv) постепенное изменение направления считывания;
v) взятие отсчетов сферического объема в k-пространстве путем повторения этапов i)-iv) несколько раз;
реконструкцию МРТ-изображения из полученных FID сигналов. Согласно изобретению радиальное ZTE получение в основном применяют стандартным образом. МР сигналы получают в виде радиальных отсчетов k-пространства путем повторения излучения РЧ импульсов в то время как постепенно изменяют направление считывания, пока не будут взяты отсчеты для требуемого объема в k-пространстве, а затем можно реконструировать MРТ-изображение из полученных MР сигналов. Однако изобретение предполагает, что интенсивность считывания изменяют так, что по меньшей мере некоторые из FID сигналов получают при разных интенсивностях считывания.
Предпочтительно, интенсивность считывания изменяют так, чтобы по меньшей мере два FID сигнала получают при практически одинаковом направлении считывания, но при разной интенсивности считывания.
Как упоминалось выше, получение FID сигналов из центра k-пространства преимущественно искажено из-за конечного времени простоя, обусловленного длительностью РЧ импульса, переключением «прием - передача» и фильтрацией сигналов. Другими словами, во время простоя коэффициент усиления приемника MР томографа еще не достиг стабильного уровня. Сутью настоящего изобретения является то, что вначале коэффициент усиления приемника может быть нестабилен, но, тем не менее, хорошо воспроизводимым. Следовательно, временное изменение коэффициента усиления приемника во время простоя может быть выявлено согласно изобретению посредством сравнения отсчетов k-пространства, полученных в идентичных местоположениях k-пространства, но в разные времена получения после излучения РЧ импульса. Это позволяет начать получение FID сигналов уже во время простоя, т.е. во время получения, при котором коэффициент усиления приемника MР томографа еще не стабилизирован после излучения РЧ импульса. Согласно изобретению временное изменение коэффициента усиления приемника можно скомпенсировать в полученных FID сигналах с тем, чтобы MРТ-изображение можно было реконструировать из FID сигналов, свободных от артефактов, вызванных искажением сигналов во время простоя приемника. Суть настоящего изобретения состоит в том, что коэффициент усиления приемника может изменяться, но начальное изменение является вполне воспроизводимым, то есть его можно скомпенсировать. Необходимая компенсация может быть получена из отдельной калибровки одновременно с временным изменением коэффициента усиления РЧ приемника. Временной коэффициент усиления приемника также можно определить из аппаратных характеристик оборудования РЧ приемника. Согласно дополнительному необязательному аспекту изобретения необходимую компенсацию получают в рамках ZTE-последовательности путем сравнения отсчетов k-пространства в идентичных местоположениях k-пространства, но в разные моменты получения отсчетов. Любое различие между уровнями сигналов, относящихся к одному и тому же местоположению k-пространства, но к разному времени получения, является представлением фактических изменений коэффициента усиления приемника. Таким образом, изменение коэффициента усиления приемника можно вычислить из указанного различия. Точные детали этого вычисления являются необязательными деталями осуществления.
Таким образом, изобретение позволяет обеспечить более точное получение FID сигналов из центральной части k-пространства в схеме ZTE получения. Следовательно, изобретение повышает качество изображения при ZTE/«бесшумном» сканировании.
В предпочтительном варианте осуществления изобретения по меньшей мере один из FID сигналов получают при нулевой интенсивности считывания. Измерение при нулевой интенсивности считывания непосредственно обеспечивает отсутствующую информацию при k=0. Указанное измерение можно ввести в ZTE последовательность в условной точке, например, в начале или в конце сканирования.
Кроме того, изменение коэффициента усиления приемника во времени можно выявить из FID сигнала, полученного при нулевой интенсивности считывания. Все значения FID сигнала соответствуют k=0, так что изменение этого сигнала непосредственно отражает временное изменение коэффициента усиления приемника во время простоя. Затем кривую временного изменения коэффициента усиления приемника, выявленную из FID сигнала, полученного при нулевой интенсивности градиента, можно использовать для компенсации эффектов времени простоя в FID сигналах, полученных при ненулевых значениях интенсивности считывания.
Таким образом, описанный способ согласно изобретению можно выполнить с помощью МР томографа, включающего в себя: по меньшей мере одну катушку главного магнита для создания однородного стационарного магнитного поля в исследуемом объеме; несколько градиентных катушек для создания переключаемых градиентов магнитного поля в разных пространственных направлениях в исследуемом объеме; по меньшей мере одну РЧ катушку для генерирования РЧ импульсов в исследуемом объеме и/или для приема МР сигналов от тела пациента, помещенного в исследуемый объем; блок управления для управления временной последовательностью РЧ импульсов и переключаемых градиентов магнитного поля и блок реконструкции. Способ согласно изобретению предпочтительно реализуется путем соответствующего программирования блока реконструкции и/или блока управления МР томографа.
Способ согласно изобретению можно успешно реализовать в большинстве МР томографах, используемых в настоящее время в клинической практике. С этой целью необходимо просто использовать компьютерную программу, посредством которой осуществляется управление MР томографом так, чтобы он выполнял раскрытые выше этапы способа согласно изобретению. Указанная компьютерная программа может находиться на носителе данных или в сети передачи данных, из которой ее необходимо выгрузить для установки в блок управления MР томографа.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Приложенные чертежи раскрывают предпочтительные варианты осуществления настоящего изобретения. Однако следует понимать, что эти чертежи приведены исключительно в иллюстративных целях, и что они никоим образом не определяют ограничения изобретения. На чертежах:
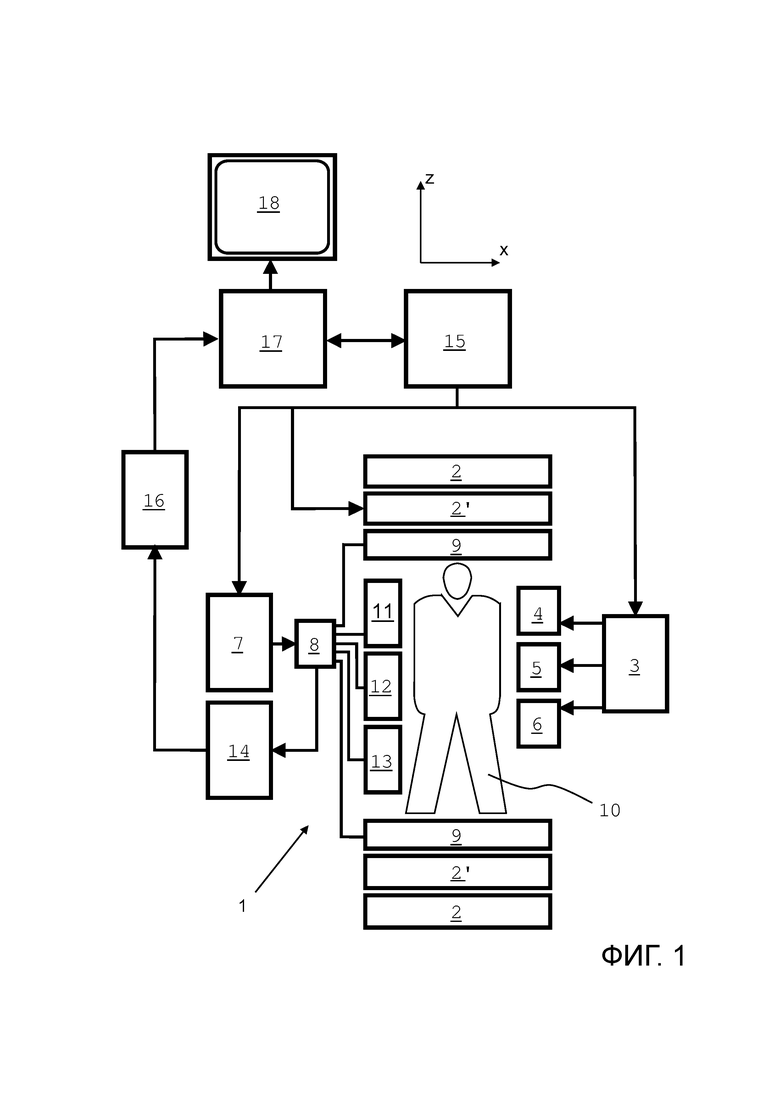
фиг. 1 - схематическое представление МР томографа для выполнения способа согласно изобретению;
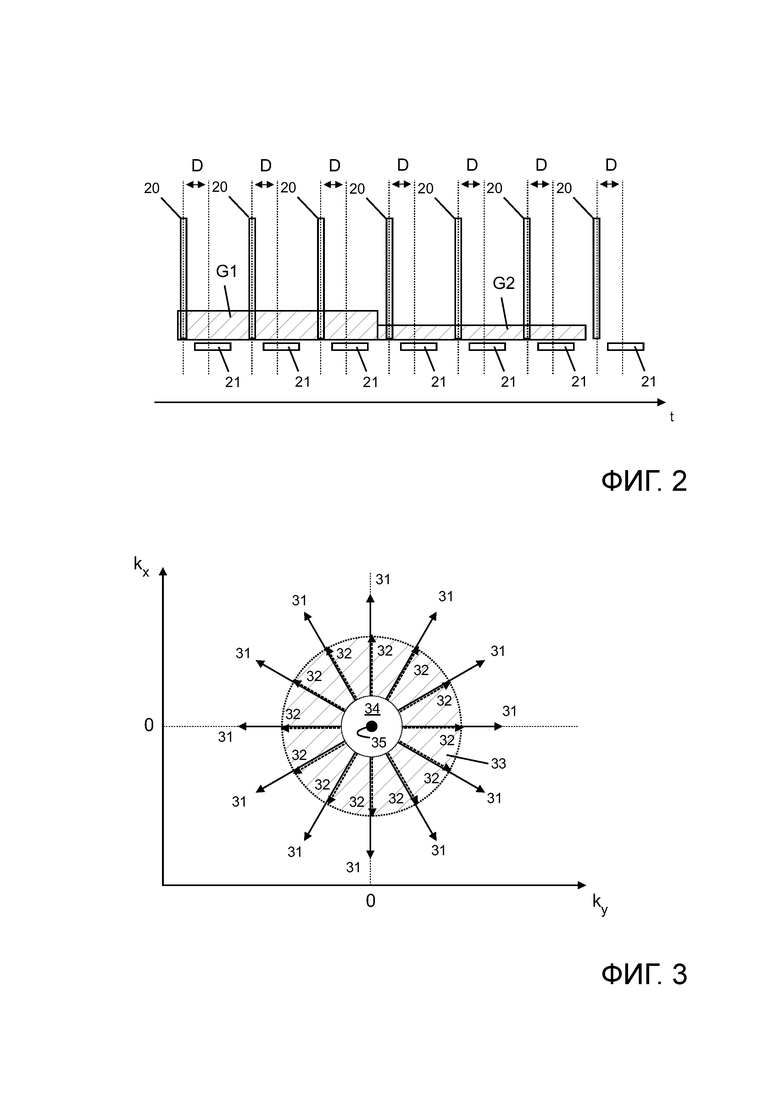
фиг. 2 - схема, иллюстрирующая ZTE последовательность, применяемую согласно изобретению;
фиг. 3 - схема, иллюстрирующая радиальное взятие отсчетов k-пространства согласно варианту осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Со ссылками на фиг. 1 показан МР томограф 1, который можно использовать для выполнения способа согласно изобретению. Томограф содержит сверхпроводящие или резистивные катушки 2 главного магнита, такие что создается практически однородное постоянное во времени поле В0 главного магнитного вдоль z-оси через исследуемый объем. Томограф кроме того содержит набор из катушек 2ʹ шиммирования (1-го, 2-го и, при необходимости, 3-его порядка), причем ток, протекающий через отдельные катушки шиммирования из набора 2ʹ, управляется с целью минимизации отклонений В0 в исследуемом объеме.
Система создания магнитного резонанса и манипулирования подает последовательность РЧ импульсов и переключаемых градиентов магнитного поля для инвертирования или возбуждения ядерных магнитных спинов, индуцирования магнитного резонанса, дефокусировки магнитного резонанса, манипулирования магнитным резонансом, пространственного и иного кодирования магнитного резонанса, насыщения спинов и т.п. для выполнения МР томографии.
В частности, усилитель 3 градиентных импульсов подает импульсы тока на выбранные катушки из числа градиентных катушек 4, 5 и 6 для всего тела по x-, y- и z-осям исследуемого объема. Цифровой РЧ передатчик 7 передает РЧ импульсы или пакеты импульсов через переключатель 8 «прием-передача» на РЧ катушку 9 для тела для передачи РЧ импульсов в исследуемый объем. Типичная последовательность для МР томографии состоит из пакета сегментов РЧ импульсов малой длительности, которые сняты вместе друг с другом и любые приложенные градиенты магнитного поля, обеспечивают выбранную манипуляцию ядерного магнитного резонанса. Указанные РЧ импульсы используют для насыщения, возбуждения резонанса, инвертирования намагниченности, дефокусировки резонанса или для манипулирования резонансом и выбора участка тела 10, помещенного в исследуемый объем. МР сигналы также снимаются РЧ катушкой 9 для тела.
Для создания МРТ-изображений ограниченных областей тела 10 посредством параллельной визуализации набор локальных матричных РЧ катушек 11, 12, 13 размещен рядом с областью, выбранной для формирования изображения. Матричные катушки 11, 12, 13 можно использовать для приема МР сигналов, индуцированных РЧ передачами катушек для тела.
Результирующие МР сигналы снимаются РЧ катушкой 9 для тела и/или матричными РЧ катушками 11, 12, 13 и демодулируются приемником 14, предпочтительно включающим в себя предусилитель (не показан). Приемник 14 соединен с РЧ катушками 9, 11, 12 и 13 через переключатель 8 «прием-передача».
Хост-компьютер 15 управляет током, протекающим через катушки 2 шиммирования, а также градиентным импульсным усилителем 3 и передатчиком 7 для создания визуализирующей последовательности ZTE согласно изобретению. Приемник 14 принимает множество строк МР данных в быстрой последовательности вслед за каждым РЧ импульсом возбуждения. Система 16 получения данных выполняет аналого-цифровое преобразование принятых сигналов и преобразует каждую строку МР данных в цифровой формат, подходящий для дальнейшей обработки. В современных МР томографах система 16 получения данных представляет собой отдельный компьютер, специально предназначенный для сбора необработанных данных изображений.
В конце концов, цифровые необработанные данные изображений реконструируют в виде представления изображения с помощью процессора 17 реконструкции, в котором используется соответствующий алгоритм реконструкции. МРТ-изображение представляет собой трехмерный объем. Затем изображение запоминают в памяти изображений, которая может быть доступна для преобразования выступающих или иных участков упомянутого представления изображения в подходящий формат для визуализации, например, через видеомонитор 18, который обеспечивает читаемое человеком отображение результирующего МРТ-изображения.
На фиг. 2 представлена схема, иллюстрирующая модифицированную ZTE последовательность, используемую согласно изобретению. Суть «бесшумного» ZTE способа, принятого в изобретении, заключается в том, что РЧ импульсы 20 возбуждения передают одновременно с включенными частотно-кодированными градиентами G1, G2 считывания магнитного поля. Градиент G1, G2 считывания магнитного поля не подразумевается как срез-селектирующий градиент, что предполагает необходимость использования коротких РЧ импульсов 20 (как правило, от 1 мкс до 8 мкс), чтобы обеспечить достаточную ширину полосы частот возбуждения. То есть, ширина полосы частот РЧ импульсов гораздо больше радиочастотного диапазона резонанса из-за поля главного магнита и наложенных магнитных градиентных полей спинов в поле обзора.
Считывание МР сигналов происходит во время интервалов 21 при наличии градиента G1, G2 считывания магнитного поля. Каждый интервал 21 имеет типичную длительность от 100 мкс до 3 мс. Градиент G1, G2 считывания магнитного поля имеет интенсивность считывания и направление считывания, которые остаются практически постоянными на каждом цикле возбуждения/считывания. После каждого цикла направление считывания изменяется очень постепенно (на фиг. 2 не показано). Направление считывания изменяется лишь слегка, например, на несколько градусов (например, 2°). При взятии полной выборки для k-пространства направление считывания изменяется до тех пор, пока сферический объем не будет покрыт с достаточной плотностью.
Как упоминалось выше, известное ограничение стандартной ZTE визуализации заключается в том, что имеется конечный интервал времени между центром каждого РЧ импульса и началом соответствующего интервала взятия отсчетов. В зависимости от используемого оборудования это время простоя может принимать любое значение от 2 мкс до 200 мкс. В этой связи центральная часть k-пространства не может быть отсканирована.
В варианте осуществления изобретения, показанном на фиг. 2, временная задержка между излучением каждого РЧ импульса 20 и началом интервала 21 получения не меньше, чем время простоя приемника, указанное на фиг. 2 под ссылочной позицией D. Таким образом, получение FID сигналов из центральной области k-пространства искажается из-за времени D простоя, обусловленного длительностью РЧ импульса, переключением «прием-передача» и фильтрацией сигналов. В течение времени D простоя коэффициент усиления приемника МР томографа 1 еще не достиг стабильного уровня.
Согласно изобретению интенсивность градиента считывания изменяется так, что по меньшей мере некоторые из FID сигналов получают при разных интенсивностях считывания. Как схематически показано на фиг. 2, интенсивность считывания переключается с G1 на G2 после нескольких получений. Направлением считывания управляют таким, что FID сигналы получают с практически идентичным направлением считывания и при разных интенсивностях G1, G2 считывания. Временное изменение коэффициента усиления приемника в течение времени D простоя, которое определяется аппаратными характеристиками МР томографа 1, и которое оказывается, как правило, хорошо воспроизводимым, выявляют согласно изобретению путем сравнения отсчетов k-пространства, полученных в идентичных местоположениях k-пространства, но в разные времена получения данных после излучения РЧ импульса. Изменение коэффициента усиления приемника можно вычислить, например, путем деления отсчетов k-пространства, полученных из одних и тех же мест k-пространства, но в разные времена получения данных. Затем эффекты времени простоя удаляют из полученных FID сигналов путем коррекции отсчетов сигналов в соответствии с определенным временным изменением коэффициента усиления приемника. Наконец, реконструируют МРТ-изображение из скорректированных FID сигналов.
Вышеописанный подход согласно изобретению позволяет начать процесс получения FID сигналов уже во время D простоя, то есть, до стабилизации приемника. Таким образом, изобретение обеспечивает более точное получение FID сигналов из центральной части k-пространства, что позволяет заметно повысить качество изображения ZTE/«бесшумного» сканирования.
На фиг. 3 показана схема взятия отсчетов k-пространства согласно изобретению. На схеме в иллюстративных целях показаны только k x и ky направления. Однако следует отметить, что трехмерное радиальное взятие отсчетов сферического объема в k-пространстве выполняется способом согласно изобретению. Несколько радиальных строк 31 k-пространства получают в виде МР сигналов после каждого РЧ импульса 20 при интенсивности G1 считывания. Кроме того, берут отсчеты строк 32 k-пространства при уменьшенной интенсивности G2 считывания. В заштрихованной зоне 33 кольцеобразной формы взятие отсчетов k-пространства при интенсивностях G1 и G2 градиента перекрывается, так что временное изменение коэффициента усиления приемника в течение времени D простоя можно выявить согласно изобретению путем сравнения отсчетов k-пространства, полученных из зоны 33.
Размер центрального сферического пробела 34 меньше чем в стандартной ZTE визуализации, поскольку получение отсчетов 31, 32 k-пространства начинается еще во время D простоя, как подробно разъяснялось выше.
Кроме того, набор 35 отсчетов k-пространства получают при нулевой интенсивности считывания. Это измерение непосредственно обеспечивает информацию при k=0. Измерение для отсчета 35 k-пространства можно ввести в ZTE последовательность в условной точке, например, в начале или в конце сканирования. На схеме с фиг. 2 набор отсчетов с k=0 получают в конце упомянутой последовательности. Вдобавок или в качестве альтернативы, временное изменение коэффициента усиления приемника можно выявить непосредственно из отсчета 35 k-пространства. Поскольку все значения FID сигнала для отсчета 35 соответствуют случаю k=0, изменение их сигналов непосредственно отражает временное изменение коэффициента усиления приемника в течение времени D простоя. Затем кривую изменения во времени коэффициента усиления приемника, выявленную из FID сигнала, полученного при нулевой интенсивности градиента, можно использовать для компенсации эффектов времени простоя в отсчетах 31, 32 k-пространства, полученных при ненулевых значениях интенсивности считывания.
Использование: для магнитно-резонансной (МР) томографии объекта. Сущность изобретения заключается в том, что на объект воздействуют визуализирующей последовательностью РЧ импульсов и переключаемых градиентов магнитного поля, при этом визуализирующая последовательность представляет собой последовательность с нулевой эхо-задержкой, содержащую: i) настройку градиента считывания магнитного поля, имеющего направление считывания и интенсивность (G1, G2) считывания; ii) излучение РЧ импульса при наличии градиента считывания магнитного поля; iii) получение FID сигнала при наличии градиента считывания магнитного поля, причем FID сигнал представляет собой радиальный отсчет k-пространства, причем получение FID сигнала начинают при времени получения, при котором коэффициент усиления приемника MР томографа еще не стабилизировался после излучения РЧ импульса; iv) постепенное изменение направления считывания; v) взятие отсчетов сферического объема в k-пространстве путем повторения этапов i)-iv) несколько раз. Наконец, реконструируют МРТ-изображение из полученных FID сигналов. Кроме того, изобретение относится к МР томографу и компьютерной программе для МР томографа. Технический результат: обеспечение возможности предоставления «бесшумной» ZTE визуализации с улучшенным взятием отсчетов центральной части k-пространства. 3 н. и 5 з.п. ф-лы, 3 ил.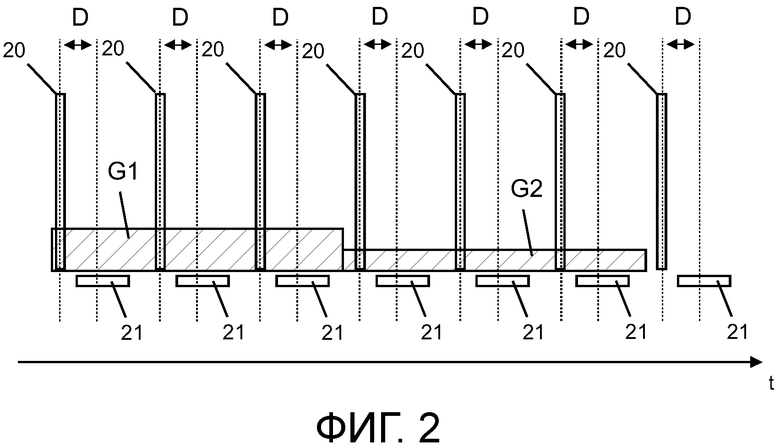
1. Способ магниторезонансной томографии объекта, помещенного в исследуемый объем MР томографа (1), причем способ содержит этапы:
воздействие на объект (10) визуализирующей последовательностью РЧ импульсов (20) и переключаемых градиентов магнитного поля, при этом визуализирующая последовательность представляет собой последовательность с нулевой эхо-задержкой, содержащую:
i) приложение градиента считывания магнитного поля, имеющего настроенное направление считывания и настроенную интенсивность считывания;
ii) излучение РЧ импульса (20) при наличии градиента считывания магнитного поля;
iii) получение FID сигнала при наличии градиента считывания магнитного поля, при этом FID сигнал представляет собой радиальный отсчет (31, 32) k-пространства, при этом получение FID сигнала начинают при времени получения, при котором коэффициент усиления приемника MР томографа (1) еще не стабилизировался после излучения РЧ импульса (20);
iv) постепенное изменение настройки направления считывания;
v) взятие отсчетов сферического объема в k-пространстве путем повторения этапов i)-iv) несколько раз;
vi) компенсацию полученных FID сигналов на временное изменение коэффициента усиления приемника; и
vii) реконструкцию МРТ-изображения из полученных и скомпенсированных FID сигналов.
2. Способ по п. 1, причем интенсивность (G1, G2) считывания изменяют между повторениями этапов i)-iv).
3. Способ по п. 2, причем интенсивность (G1, G2) считывания изменяют так, что по меньшей мере два FID сигнала получают при практически идентичном направлении считывания и при разных интенсивностях считывания.
4. Способ по п. 3, причем временное изменение коэффициента усиления приемника выявляют сравнением отсчетов (31, 32) k-пространства, полученных в идентичных местоположениях (33) k-пространства, но при разных временах получения после излучения РЧ импульса (20).
5. Способ МР томографии согласно любому из пп. 1-4, причем по меньшей мере один FID сигнал получают при нулевой интенсивности считывания.
6. Способ МР томографии по п. 5, причем временное изменение коэффициента усиления приемника выявляют из FID сигнала, полученного при нулевой интенсивности считывания.
7. МР томограф, содержащий по меньшей мере одну катушку (2) главного магнита для создания однородного стационарного магнитного поля в исследуемом объеме; несколько градиентных катушек (4, 5, 6) для создания переключаемых градиентов (G) магнитного поля в разных пространственных направлениях в исследуемом объеме; по меньшей мере одну РЧ катушку (9) для создания РЧ импульсов в исследуемом объеме и/или для приема МР сигналов от объекта (10), помещенного в исследуемый объем; блок (15) управления для управления временной последовательностью РЧ импульсов и переключаемых градиентов магнитного поля и блок (17) реконструкции, причем МР томограф (1) предназначен для выполнения следующих этапов:
воздействие на объект (10) визуализирующей последовательностью РЧ импульсов (20) и переключаемых градиентов магнитного поля, при этом визуализирующая последовательность представляет собой последовательность с нулевой эхо-задержкой, содержащую:
i) приложение градиента считывания магнитного поля, имеющего установленное направление считывания и интенсивность (G1, G2) считывания;
ii) излучение РЧ импульса (20) при наличии градиента считывания магнитного поля;
iii) получение FID сигнала при наличии градиента считывания магнитного поля, причем FID сигнал представляет собой радиальный отсчет (31, 32) k-пространства, причем получение FID сигнала начинается во время получения, при котором коэффициент усиления приемника MР томографа (1) еще не стабилизировался после излучения РЧ импульса (20);
iv) постепенное изменение настройки направления считывания;
v) взятие отсчетов сферического объема в k-пространстве путем повторения этапов i)-iv) несколько раз;
vi) компенсацию полученных FID сигналов на временное изменение коэффициента усиления приемника и
vii) реконструкцию МРТ-изображения из полученных и скомпенсированных FID сигналов.
8. Носитель данных, содержащий компьютерную программу, подлежащую выполнению на МР томографе, причем компьютерная программа содержит команды для:
создания визуализирующей последовательности РЧ импульсов (20) и переключаемых градиентов магнитного поля, при этом визуализирующая последовательность представляет собой последовательность с нулевым временем эхо-задержки, содержащую:
i) настройку градиента считывания магнитного поля, имеющего направление считывания и интенсивность (G1, G2) считывания;
ii) излучение РЧ импульса (20) при наличии градиента считывания магнитного поля;
iii) получение FID сигнала при наличии градиента считывания магнитного поля, при этом FID сигнал представляет собой радиальный отсчет (31, 32) k-пространства, причем получение FID сигнала начинают при времени получения, при котором коэффициент усиления приемника MР томографа (1) еще не стабилизировался после излучения РЧ импульса (20);
iv) постепенное изменение направления считывания;
v) взятие отсчетов сферического объема в k-пространстве путем повторения этапов i)-iv) несколько раз;
vi) компенсацию полученных FID сигналов на временное изменение коэффициента усиления приемника; и
vii) реконструкцию МРТ-изображения из полученных и скомпенсированных FID сигналов.
| WO 2012140543 A1, 18.10.2012 | |||
| ЭЛЕКТРОННОЕ УСТРОЙСТВО ПОДАЧИ ПАРА | 2018 |
|
RU2724172C1 |
| US 7777484 B2, 17.08.2010 | |||
| US 7474097 B2, 06.01.2009 | |||
| УСТРОЙСТВО МАГНИТОРЕЗОНАНСНОГО ТОМОГРАФА | 1992 |
|
RU2047871C1 |
| Способ ЯМР-томографии | 1986 |
|
SU1368752A1 |

