ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области магнитно-резонансной (МР) томографии. Оно относится к способу МР-томографии по меньшей мере движущейся части тела пациента, помещенной в области исследования аппарата МРТ. Настоящее изобретение также относится к аппарату МРТ и к компьютерной программе для выполнения на аппарате МРТ.
УРОВЕНЬ ТЕХНИКИ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
МР способы формирования изображения, которые используют взаимодействие между магнитными полями и ядерными спинами, для того чтобы сформировать двумерные или трехмерные изображения, широко применяются в настоящее время, в особенности в области медицинской диагностики, поскольку для целей визуализации мягких тканей они превосходят другие способы визуализации во многих отношениях, не требуют ионизирующего излучения и, как правило, не инвазивны.
В соответствии с методом МРТ в целом, тело исследуемого пациента располагают в сильном однородном магнитном поле, направление которого в то же время определяет собой ось (как правило, ось z) координатной системы, на которой основано измерение. Магнитное поле создает различные энергетические уровни отдельных ядерных спинов в зависимости от напряженности магнитного поля, которые могут быть возбуждены (спиновый резонанс) посредством воздействия электромагнитного переменного поля (РЧ поле) определенной частоты (так называемая частота Лармора, или МР частота). С макроскопической точки зрения распределение отдельных ядерных спинов формирует общую намагниченность, которую можно вывести из состояния равновесия посредством воздействия электромагнитного импульса соответствующей частоты (РЧ импульс), при том, что магнитное поле расположено перпендикулярно оси z, так что намагниченность приходит в прецессионное движение вокруг оси z. Прецессионное движение описывает поверхность конуса, угол апертуры которого называется углом отклонения. Величина угла отклонения зависит от величины и продолжительности приложенного электромагнитного импульса. В случае так называемого 90° импульса спины отклоняются от оси z в поперечную плоскость (угол отклонения 90°).
После прекращения РЧ импульса намагниченность возвращается в исходное состояние равновесия, в котором намагниченность в направлении z снова нарастает с одной постоянной времени T1 (спин-решеточное или продольное время релаксации), а намагниченность в направлении, перпендикулярном оси z, восстанавливается с другой постоянной времени T2 (спин-спиновое или поперечное время релаксации). Изменение намагниченности можно детектировать посредством принимающих РЧ катушек, которые расположены и ориентированы внутри области исследования аппарата МРТ таким образом, что изменение намагниченности измеряется в направлении, перпендикулярном оси z. Спад поперечной намагниченности сопровождается, после применения, например, 90° импульса, переходом ядерных спинов (вызванным локальными неоднородностями магнитного поля) из упорядоченного состояния с одной и той же фазой в состояние, в котором все фазовые углы равномерно распределены (расфазировка). Расфазировку можно скомпенсировать с помощью рефокусирующего импульса (например, 180° импульса). Это приводит к возникновению эхосигнала (спиновое эхо) в принимающих катушках.
Для того чтобы создать пространственное разрешение в теле, на однородное магнитное поле накладывают линейные градиенты магнитного поля в направлении трех главных осей, что приводит к линейной пространственной зависимости частоты спинового резонанса. Обнаруженный принимающими катушками сигнал в этом случае содержит компоненты различных частот, которые можно связать с различными локализациями в теле. Получаемые посредством принимающих катушек данные сигнала соответствуют пространственно-частотному диапазону и называются данными k-пространства. Данные k-пространства, как правило, включают в себя множество строк, полученных с различным фазовым кодированием. Каждую строку оцифровывают посредством сбора ряда выборок. Совокупность данных k-пространства преобразуют в МР изображение, например, посредством преобразования Фурье.
Кардиальная интервенционная МР-томография представляет собой перспективное средство, в котором можно соединить точную локализацию интервенционного инструмента с отличным контрастом мягких тканей. Более того, посредством соответствующих методов МР-томографии может быть получена функциональная информация от сердца. Сочетание МР-томографии с отслеживанием интервенционных инструментов особенно привлекательно для терапевтических применений, для которых необходим мониторинг терапии, таких как, например, МР электрофизиологические воздействия. Однако кардиальная МР-томография связана с компромиссом между пространственным разрешением, временем сканирования и отношением сигнал-шум (SNR). Поэтому эффективная компенсация движения является чрезвычайно важной. Получение достаточных МР данных для реконструкции изображения занимает конечный период времени. Движение объекта, подвергаемого визуализации, такое как ритмичное движение сердца, в сочетании с дыхательным движением пациента, во время данного конечного времени получения данных, как правило, приводит к артефактам движения на соответствующем реконструированном МР изображении. Время получения можно уменьшить только очень незначительно, если задано определенное разрешение МР изображения. На динамических МР-томографических сканах, необходимых для мониторинга терапии, движение исследуемого объекта во время получения данных приводит к различного рода артефактам размытости, неверного позиционирования и деформации. Были разработаны проспективные методы коррекции движения, такие как так называемый метод навигатора или PACE, чтобы преодолеть проблемы, связанные с движением, посредством проспективной коррекции параметров томографии, т.е. параметров последовательности импульсов, применяемой для получения сигнала МР, которые определяют локализацию и ориентацию поля изображения (FOV) внутри области визуализации. При использовании метода навигатора совокупность МР данных получают из области в форме карандаша (луч навигатора), которая пересекает диафрагму исследуемого пациента. Эту область интерактивно помещают таким образом, что положение диафрагмы можно реконструировать из полученной совокупности МР данных и использовать для коррекции движения FOV в реальном времени. Метод навигатора, в первую очередь, применяют для минимизации влияния дыхательного движения в кардиальных исследованиях. В противоположность методу навигатора, для которого необходим луч навигатора, чтобы детектировать несовпадения из-за движения, в вышеупомянутом методе PACE используют предварительно полученные динамические изображения, для того чтобы проспективно корректировать параметры томографии в последовательности следующих один за другим динамических изображений. Кроме того, известно применение основанной на ЭКГ синхронизации с целью синхронизации получения изображений с ритмичным движением сердца, посредством чего уменьшают артефакты движения, вызванные сердечным циклом.
Известные подходы к компенсации движения неблагоприятно отличаются необходимостью увеличения времени сканирования из-за уменьшенного рабочего цикла сканирования. Кроме того, вышеупомянутый метод навигатора требует сложного планирования сканирования.
С другой стороны, недавно было показано, что МР-томография способна визуализировать эффект кардиальной электрофизиологической абляции вскоре после абляции, причем было продемонстрировано, что связанные с абляцией физиологические изменения можно идентифицировать посредством МР-томографии in situ. Однако в настоящее время существуют ограничения в отношении качества изображений из-за ограниченного отношения сигнал-шум (SNR) и артефактов движения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Из вышеизложенного легко понять, что существует необходимость в улучшенном способе интервенционной МР-томографии. Поэтому целью настоящего изобретения является обеспечить возможность контролируемой МРТ терапии движущихся частей тела, не требующей синхронизации по ЭКГ, методов навигатора или других требующих времени или сложных способов компенсации движения.
В соответствии с настоящим изобретением описан способ МР-томографии движущейся части тела пациента, помещенной в область исследования аппарата МРТ. Данный способ включает в себя этапы:
a) сбора отслеживаемых данных от интервенционного инструмента, введенного в часть тела,
b) воздействия на указанную часть тела последовательностью импульсов для получения от нее одного или более сигналов МР, причем параметры перемещения и/или вращения, описывающие движение части (22) тела (10), выводят из отслеживаемых данных, причем параметры последовательности импульсов корректируют, так чтобы скомпенсировать движение в соответствии с параметрами перемещения и/или вращения, причем параметры перемещения и/или вращения, описывающие движение части (22) тела (10), выводят из отслеживаемых данных, параметры последовательности импульсов корректируют, так чтобы скомпенсировать движение в соответствии с параметрами перемещения и/или вращения,
c) получения совокупности данных сигнала МР посредством повторения этапов a) и b) несколько раз,
d) реконструирования одного или более МР изображения из совокупности данных сигнала МР.
Способ согласно настоящему изобретению позволяет получить МР изображения с компенсацией движения в месте нахождения интервенционного инструмента, который был введен в соответствующую движущуюся часть (такую как, например, сердце) тела пациента. Сущностью настоящего изобретения является использование отслеживаемых данных, т.е. информации о локализации, собранной из интервенционного инструмента, для компенсации движения на изображении. Указанный интервенционный инструмент предпочтительно содержит активное средство для отслеживания, для того чтобы сообщать его местоположение и ориентацию внутри исследуемой части тела на аппарат МРТ, применяемый для визуализации. Известные активные МР методы отслеживания, в которых применяются одна или более РЧ микрокатушек, прикрепленных к интервенционному инструменту, хорошо подходят для способа согласно настоящему изобретению. Однако известные пассивные маркеры, которые можно применять в МР-томографии в сочетании с подходящими алгоритмами обнаружения, также допустимы. Также можно применять другие, не основанные на МР, методы отслеживания. В этом случае необходим подходящий интерфейс между соответствующей системой слежения и аппаратом МРТ, для того чтобы сделать возможным использование отслеживаемых данных при управлении последовательностями аппарата МРТ.
Предпочтительно, отслеживаемые данные, собранные в соответствии с настоящим изобретением, включают в себя информацию относительно мгновенного местоположения (координаты x, y, z) и/или ориентации (углы Эйлера) по меньшей мере части интервенционного инструмента (например, наконечника катетера) в пределах области исследования. В том случае, когда к интервенционному инструменту прикреплены РЧ микрокатушки, соответствующие РЧ микрокатушки предпочтительно соединены с аппаратом МРТ посредством подходящей линии передачи (РЧ, оптической или беспроводной). Подходящие интерфейсы для включения такого, основанного на МР, отслеживания в способы МР-томографии как таковые известны в данной области техники (см., например, патент США 2008/0097189 A1). Таким образом, аппарат МРТ включает в себя подходящее программное обеспечение, реализующее последовательности импульсов для получения сигналов МР и сбора и оценки координат микрокатушек.
В способе согласно настоящему изобретению, как указано выше, исследуемая движущаяся часть тела подвергается воздействию последовательности импульсов, для того чтобы получить сигналы МР для реконструкции изображений, причем параметры последовательности импульсов корректируют на основании отслеживаемых данных. Это означает, что аппарат МРТ адаптирует параметры сканирования на основании отслеживаемых данных, тем самым вызывая сдвиг и/или вращение геометрии сканирования в соответствии с исследуемой движущейся анатомической структурой в реальном времени. Данная корректировка параметров томографии может быть применена в соответствии с настоящим изобретением даже к отдельным строкам k-пространства. Корректировка параметров томографии во время получения сигналов МР делает возможной проспективную коррекцию случайного движения вблизи интервенционного инструмента. Подход настоящего изобретения представляется особенно полезным для мониторируемых с помощью МРТ методов лечения, таких как, например, катетерная абляция. Настоящее изобретение использует информацию о местоположении, содержащуюся в отслеживаемых данных от интервенционного инструмента, который остается в фиксированном геометрическом расположении относительно анатомической структуры.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения динамические серии МР изображений реконструируют из неоднократно получаемых совокупностей данных сигналов МР. Это означает, что проводится 4D МР-томография, причем параметры последовательности импульсов непрерывно корректируются на основании собранных отслеживаемых данных, так что FOV остается по существу в постоянном по времени геометрическом расположении по отношению к исследуемой движущейся части тела.
Если интервенционный инструмент непреднамеренно «скользит», т.е. движется относительно анатомической структуры, подвергаемой визуализации и/или лечению, происходит немедленное усиление артефактов движения на МР изображениях, реконструированных в соответствии с настоящим изобретением. Данные артефакты можно детектировать автоматически, и можно генерировать соответствующее предупреждение пользователю аппарата МРТ и/или специалисту, осуществляющему вмешательство.
В альтернативном варианте движение интервенционного инструмента относительно движущейся части тела можно обнаружить в соответствии с настоящим изобретением посредством детектирования отклонения движения интервенционного инструмента от повторяющейся схемы движения на основании неоднократно собранных отслеживаемых данных. Этот способ детектирования «скольжения» интервенционного инструмента также можно использовать для генерации предупреждения специалисту, осуществляющему вмешательство.
Способ согласно настоящему изобретению, таким образом, предпочтительно предоставляет возможность автоматического детектирования неправильно зафиксированного положения терапевтического или диагностического интервенционного устройства по отношению к анатомической структуре, подвергаемой лечению и/или исследованию, при этом повышая точность проведения лечебной процедуры и, следовательно, результат лечения. По этой причине способ согласно настоящему изобретению особенно полезен для интервенционной кардиальной МР-томографии, в которой применяют отслеживаемое подобное катетеру устройство. Опытный специалист, осуществляющий вмешательство, способен прочно зафиксировать интервенционный инструмент по отношению к локальной кардиальной анатомической структуре, как для того, чтобы осуществить лечение, так и для проведения какой-либо диагностики. Затем отслеживаемый интервенционный инструмент можно немедленно использовать, для того чтобы детектировать локальное движение кардиальной анатомической структуры очень точно и с высоким временным разрешением. В соответствии с настоящим изобретением, указанные отслеживаемые данные позволяют осуществлять проспективную коррекцию движения на изображении, т.е. через получение отдельных строк или сегментов k-пространства, и посредством этого делают возможным получение сигналов МР с компенсацией движения без необходимости в навигации, переключении по ЭКГ или других методах оценки и/или компенсации движения. Таким образом, становится возможной более быстрая МР-томография локальной анатомической структуры, которую можно применять для улучшения SNR при одновременном уменьшении артефактов движения. В случае активно отслеживаемого абляционного катетера, сканирование повреждения можно эффективно проводить без какого-либо геометрического планирования, поскольку интервенционный инструмент расположен в непосредственной близости от повреждения и, следовательно, его можно использовать непосредственно для того, чтобы определить FOV. Это может оказаться чрезвычайно полезным для проведения множества точечных абляций, например, с целью формирования кольца или линии связанных абляций, что необходимо для изоляции пульмональных вен. В то же время точность проведения лечебной процедуры значительно повышается, поскольку непреднамеренное «скольжение» инструмента относительно анатомической структуры, подвергаемой лечению, немедленно и надежно распознается благодаря принципу настоящего изобретения.
Способ согласно настоящему изобретению можно успешно сочетать с томографией по технологии PROPELLER. В известной концепции PROPELLER (периодический поворот накладывающихся параллельных линий с улучшенной реконструкцией), сигналы МР собираются в k-пространстве в N полос, каждая из которых состоит из параллельных линий, соответствующих фазокодирующим строкам с наиболее низкой частотой L в декартовой схеме дискретизации k-пространства. Каждая полоса, которая также называется лопаткой k-пространства, поворачивается в k-пространстве на угол 180°/N, так что полный набор МР данных заполняет приблизительно круг в k-пространстве. Одной из существенных особенностей технологии PROPELLER является то, что для каждой лопатки k-пространства получают центральную круговую часть k-пространства с диаметром L. Указанную центральную часть можно использовать, для того чтобы реконструировать изображение с низким разрешением для каждой лопатки k-пространства. Указанные изображения с низким разрешением или их k-пространственные представления можно сравнить друг с другом, для того чтобы устранить смещения в плоскости и фазовые ошибки, которые обусловлены движением исследуемого объекта. Кроме того, можно применять подходящий метод, такой как взаимная корреляция, для того чтобы определить, какие лопатки k-пространства были получены со значительным смещением в плоскости. Поскольку сигналы МР объединяются в k-пространстве до реконструкции окончательного МР изображения, в участках, в которых лопатки k-пространства накладываются, предпочтительно используют МР данные от лопаток k-пространства с наименьшей величиной движения в плоскости, так что артефакты, вызванные движением в плоскости, уменьшаются. Подход PROPELLER использует избыточную дискретизацию в центральной части k-пространства, для того чтобы получить метод получения МР изображений, который будет устойчив по отношению к движению исследуемой части тела. Способ согласно настоящему изобретению можно применять, для того чтобы корректировать положение и/или поворот отдельных лопаток k-пространства последовательности в подходе PROPELLER на основании собранных отслеживаемых данных. Таким образом достигают чрезвычайно точной коррекции движения посредством комбинирования корреляции избыточных данных в центре k-пространства с собранными отслеживаемыми данными от интервенционного инструмента, который зафиксирован относительно исследуемой анатомической структуры.
Способ согласно настоящему изобретению, описанный выше, может быть осуществлен посредством аппарата МРТ, включающего в себя по меньшей мере одну главную магнитную катушку для генерации однородного постоянного магнитного поля в области исследования, ряд градиентных катушек для генерации переключаемых градиентов магнитного поля в различных направлениях в пространстве в области исследования, по меньшей мере одну РЧ катушку для генерации РЧ импульсов в области исследования и для приема сигналов МР от тела пациента, расположенного в области исследования, блок управления для контроля временной последовательности РЧ импульсов и переключаемых градиентов магнитного поля, блок реконструкции и блок визуализации. Для того чтобы сделать возможным сбор отслеживаемых данных от интервенционного инструмента в соответствии с настоящим изобретением, к аппарату МРТ должна быть подключена подходящая система слежения за инструментом. Для активного, основанного на МР, слежения по меньшей мере одна РЧ микрокатушка может быть прикреплена к интервенционному инструменту, причем отслеживаемые данные собираются посредством аппарата МРТ в виде сигналов МР, сгенерированных или обнаруженных РЧ микрокатушкой.
Способ согласно настоящему изобретению может быть успешно осуществлен на большинстве аппаратов МРТ, применяемых в настоящее время в клинической практике. С этой целью всего лишь необходимо использовать компьютерную программу, с помощью которой управляется аппарат МРТ, таким образом, чтобы он осуществлял описанные выше этапы способа согласно настоящему изобретению. Указанная компьютерная программа может находиться либо на информационном носителе, либо в сети передачи данных, чтобы ее можно было загрузить для инсталляции на блоке управления аппарата МРТ.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи раскрывают предпочтительные варианты осуществления настоящего изобретения. Следует понимать, однако, что данные чертежи выполнены исключительно с иллюстративной целью, а не как определение пределов настоящего изобретения. На чертежах
на фиг.1 изображен аппарат МРТ для осуществления способа согласно настоящему изобретению;
на фиг.2 схематически изображено движущееся сердце пациента, исследуемого в соответствии со способом согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ
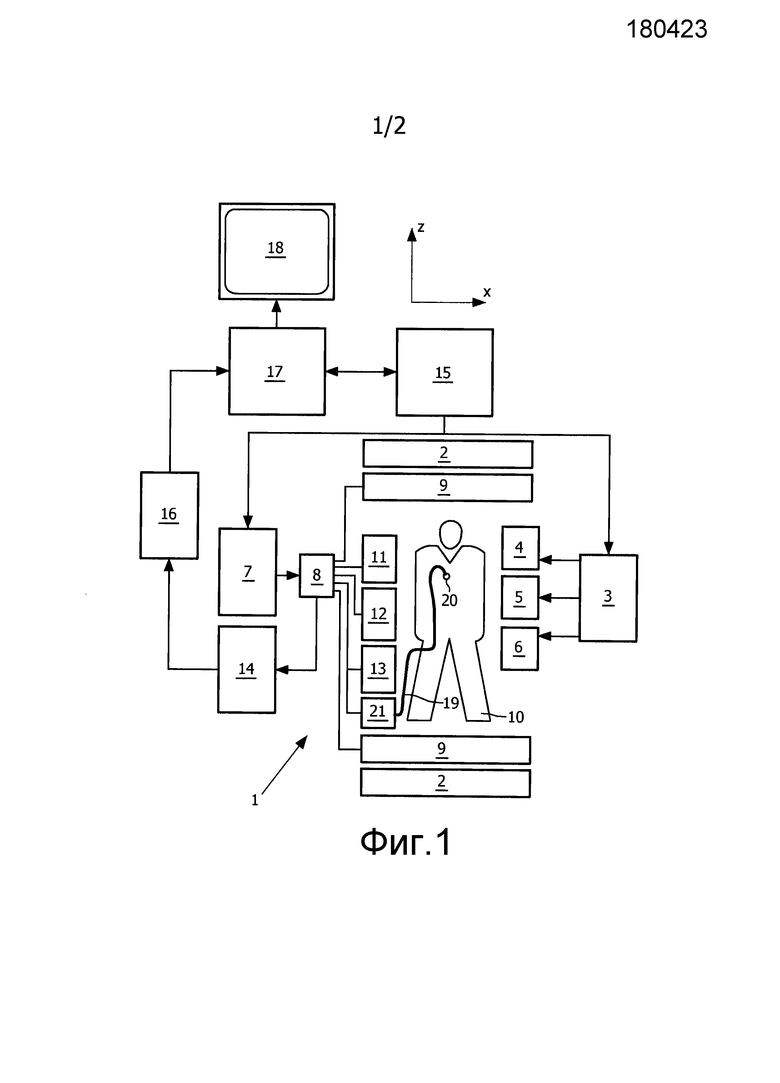
На фиг.1 показан аппарат 1 МРТ. Данный аппарат содержит сверхпроводящие или резистивные главные магнитные катушки 2, так что создается по существу однородное постоянное по времени главное магнитное поле вдоль оси z во всей области исследования.
Система генерирования и управления магнитным резонансом прикладывает серию РЧ импульсов и переключаемые градиенты магнитного поля, чтобы развернуть или возбудить ядерные магнитные спины, вызвать магнитный резонанс, рефокусировать магнитный резонанс, управлять магнитным резонансом, пространственно и как-то иначе кодировать магнитный резонанс, насытить спины и тому подобное, для того чтобы провести МР-томографию.
Конкретнее, градиентный импульсный усилитель 3 прикладывает импульсы тока к выбранным градиентным катушкам 4, 5 и 6 для всего тела вдоль осей x, y и z области исследования. A цифровой РЧ излучатель 7 передает РЧ импульсы или импульсные пакеты через переключатель 8 приема/передачи на объемную РЧ катушку 9 для всего тела, чтобы передать РЧ импульсы в область исследования. Типичная МР последовательность импульсов состоит из пакета РЧ импульсных сегментов малой продолжительности, которые вместе друг с другом и какими-либо прилагаемыми градиентами магнитного поля осуществляют выбранную операцию с ядерным магнитным резонансом. РЧ импульсы применяют для того, чтобы насытить, возбудить резонанс, инвертировать намагниченность, рефокусировать резонанс или управлять резонансом и выбрать часть тела 10, помещенную в области исследования. Сигналы МР также обнаруживаются объемной РЧ катушкой 9 для всего тела.
Для формирования МР изображений ограниченных участков тела 10 с помощью параллельной визуализации комплект локальных матричных РЧ катушек 11, 12, 13 помещают рядом с участком, выбранным для визуализации. Матричные катушки 11, 12, 13 можно применять для приема сигналов МР, индуцированных РЧ излучением катушки для всего тела.
Полученные в результате сигналы МР, обнаруженные объемной РЧ катушкой 9 для всего тела и/или матричными РЧ катушками 11, 12, 13, демодулируются приемником 14, предпочтительно включающим в себя предусилитель (не показан). Приемник 14 соединен с РЧ катушками 9, 11, 12 и 13 посредством переключателя 8 приема/передачи.
Главный компьютер 15 управляет градиентным импульсным усилителем 3 и излучателем 7, чтобы генерировать любую из множества МР последовательностей импульсов, например, визуализацию с помощью метода быстрого спинового эха (TSE) и тому подобное. Для выбранной последовательности приемник 14 принимает одну или множество строк МР данных в быстрой последовательности после каждого РЧ возбуждающего импульса. Система 16 получения данных осуществляет аналогово-цифровое преобразование принятых сигналов и преобразует каждую строку МР данных в цифровой формат, пригодный для дальнейшей обработки. В современных аппаратах МРТ система 16 получения данных представляет собой отдельный компьютер, который специализируется на получении необработанных данных изображения.
В конечном итоге цифровые необработанные данные изображения реконструируют в представление в виде изображений с помощью процессора 17 реконструкции, который применяет преобразование Фурье или другие подходящие алгоритмы реконструкции, такие как SENSE или SMASH. МР изображение может представлять плоский срез пациента, массив параллельных плоских срезов, трехмерный объем или тому подобное. Затем изображение сохраняют в памяти для хранения изображений, где к ним можно получить доступ для преобразования срезов, проекций или других частей представления в виде изображений в подходящий формат для визуализации, например, посредством видеомонитора 18, который обеспечивает читаемое человеком отображение полученного в результате МР изображения.
Интервенционный инструмент 19, такой как, например, абляционный катетер, вводят в тело 10 пациента. Катетер 19 соединен с каналом приема аппарата 1 МРТ посредством интерфейса 21. РЧ микрокатушка 20 прикреплена к дистальному концу катетера 19, что делает возможным локализацию наконечника катетера посредством обнаружения сигналов МР с помощью РЧ микрокатушки 20 в присутствии градиентов магнитного поля.
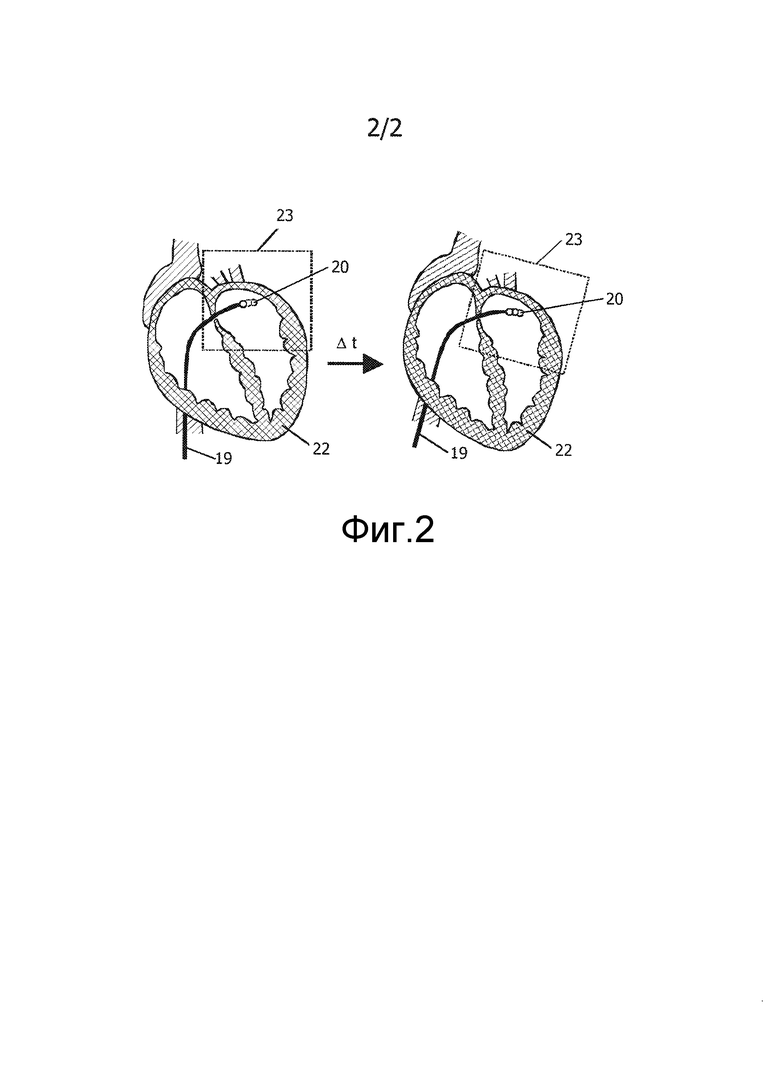
На фиг.2 показан схематический разрез сердца 22 пациента в два разных момента, разделенных интервалом времени Δt. Абляционный катетер 19 вводят в сердце 22, причем наконечник катетера, к которому прикреплена микрокатушка 20, жестко фиксируют в миокарде. Поскольку наконечник катетера 19 остается локально фиксированным относительно анатомической структуры сердца, информацию о местоположении, получаемую из отслеживаемых данных, собираемых посредством микрокатушки 20, используют в соответствии с настоящим изобретением для корректировки параметров сканирования последовательности импульсов, для того чтобы достигнуть коррекции движения FOV 23 в реальном времени. На фиг.2 показано, что положение и ориентация FOV 23 изменилась за интервал времени Δt. Активно отслеживаемый абляционный катетер 19, таким образом, применяют, для того чтобы детектировать локальное движение анатомической структуры, чтобы осуществить проспективную коррекцию движения на изображении. FOV 23 перемещается и поворачивается так, что оно остается в фиксированном геометрическом расположении по отношению к исследуемой анатомической структуре сердца 22. Не требуются синхронизации с навигатором, синхронизации по ЭКГ или других методов компенсации движения. Повреждение, создаваемое абляционным катетером 19, можно непосредственно сканировать с высоким качеством изображения, т.е. без артефактов движения, вызванных дыхательным движением и/или ритмичным движением сердца 22. Если катетер 19 «скользит», так что катетер 19 движется по отношению к анатомической структуре сердца 22, немедленно появляются артефакты движения на МР изображении, реконструированном из полученных сигналов МР. Это происходит, поскольку анатомическая структура больше не остается в фиксированном геометрическом расположении по отношению к FOV 23. Резкое увеличение артефактов изображения можно применять для того, чтобы генерировать соответствующее предупреждение специалисту, осуществляющему вмешательство.
Группа изобретений относится к области медицины. Способ магнитно-резонансной томографии (МРТ) движущейся части тела пациента, помещенной в область исследования аппарата МРТ, причем указанный способ содержит этапы, на которых: a) осуществляют сбор отслеживаемых данных от микрокатушки, прикрепленной к интервенционному инструменту, введенному в часть тела, b) воздействуют на часть тела последовательностью импульсов для получения от нее одного или более сигналов МР, причем параметры перемещения и/или вращения, описывающие движение части тела, выводят из отслеживаемых данных, причем параметры последовательности импульсов корректируют, так чтобы скомпенсировать движение на изображении посредством сдвига или вращения при сканировании в соответствии с параметрами перемещения и/или вращения, c) получают совокупность данных сигнала МР посредством повторения этапов а) и b) несколько раз, d) реконструируют одно или более МР изображения из совокупности данных сигнала МР. При этом аппарат МРТ для осуществления способа включает в себя главную магнитную катушку для генерации однородного постоянного магнитного поля в области исследования, ряд градиентных катушек для генерации переключаемых градиентов магнитного поля в различных направлениях в пространстве в области исследования, РЧ катушку для генерации РЧ импульсов в области исследования и/или для приема сигналов МР от тела пациента, расположенного в области исследования, блок управления для контроля временной последовательности РЧ импульсов и переключаемых градиентов магнитного поля и блок реконструкции. Информационный носитель содержит исполняемые компьютером команды для осуществления способа МРТ движущейся части тела пациента, помещенной в область исследования аппарата МРТ. Применение данной группы изобретений позволит уменьшить время сканирования и обеспечит эффективную компенсацию движения. 3 н. и 8 з.п. ф-лы, 2 ил.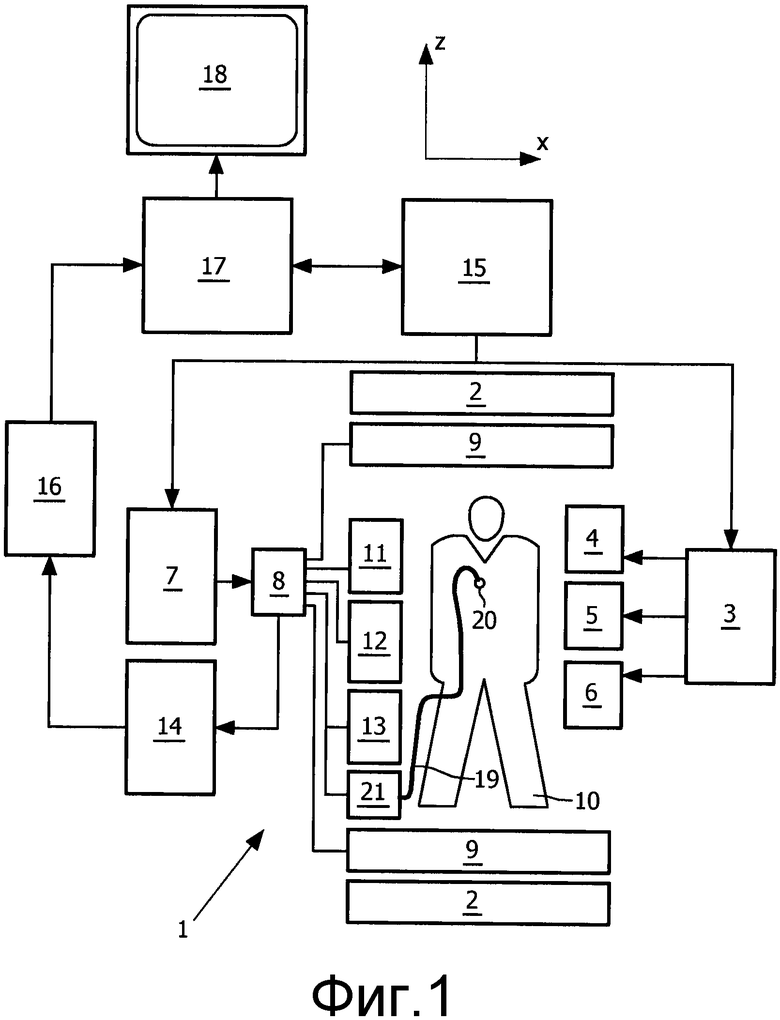
1. Способ магнитно-резонансной (МР) томографии движущейся части (22) тела (10) пациента, помещенной в область исследования аппарата (1) МРТ, причем указанный способ содержит этапы, на которых:
a) осуществляют сбор отслеживаемых данных от по меньшей мере одной микрокатушки, прикрепленной к интервенционному инструменту (19), введенному в часть (22) тела (10),
b) воздействуют на часть (22) тела (10) последовательностью импульсов для получения от нее одного или более сигналов МР, причем параметры перемещения и/или вращения, описывающие движение части (22) тела (10), выводят из отслеживаемых данных, причем параметры последовательности импульсов корректируют, так чтобы скомпенсировать движение на изображении посредством сдвига или вращения при сканировании в соответствии с параметрами перемещения и/или вращения,
c) получают совокупность данных сигнала МР посредством повторения этапов а) и b) несколько раз,
d) реконструируют одно или более МР изображения из совокупности данных сигнала МР.
2. Способ по п. 1, в котором отслеживаемые данные включают в себя информацию относительно мгновенного положения и/или ориентации по меньшей мере части интервенционного инструмента (19) в пределах области исследования.
3. Способ по п. 1 или 2, в котором движение интервенционного инструмента (19) относительно части (22) тела (10) обнаруживают с помощью детектирования артефактов движения на реконструированном МР изображении.
4. Способ по п. 3, в котором параметры последовательности импульсов корректируют на этапе b), так что поле (23) изображения (FOV) остается, по существу, в постоянном по времени геометрическом расположении по отношению к движущейся части (22) тела (10).
5. Способ по п. 1, в котором динамические серии МР изображений реконструируют из неоднократно получаемых совокупностей данных сигналов МР.
6. Способ по п. 5, в котором движение интервенционного инструмента (19) по отношению к части (22) тела (10) обнаруживают с помощью детектирования отклонения движения интервенционного инструмента (19) от повторяющейся схемы движения на основании неоднократно собранных отслеживаемых данных.
7. Способ по п. 1, в котором последовательность импульсов представляет собой последовательность PROPELLER, причем положение и/или поворот отдельных k-пространственных лопастей последовательности PROPELLER корректируют на этапе b) на основании собранных отслеживаемых данных.
8. Аппарат магнитно-резонансной томографии (МРТ) для осуществления способа по пп. 1-7, причем аппарат (1) МРТ включает в себя по меньшей мере одну главную магнитную катушку (2) для генерации однородного постоянного магнитного поля в области исследования, ряд градиентных катушек (4, 5, 6) для генерации переключаемых градиентов магнитного поля в различных направлениях в пространстве в области исследования, по меньшей мере одну РЧ катушку (9) для генерации РЧ импульсов в области исследования и/или для приема сигналов МР от тела (10) пациента, расположенного в области исследования, блок управления (15) для контроля временной последовательности РЧ импульсов и переключаемых градиентов магнитного поля и блок реконструкции (17), причем указанный аппарат (1) МРТ выполнен с возможностью осуществления этапов:
a) сбора отслеживаемых данных от по меньшей мере одной микрокатушки, прикрепленной к интервенционному инструменту (19), введенному в движущуюся часть (22) тела (10),
b) воздействия на часть (22) тела (10) импульсной последовательностью, содержащей РЧ импульсы, сгенерированные с помощью РЧ катушки (9), и переключаемые градиенты магнитного поля, сгенерированные с помощью градиентных катушек (4, 5, 6), для получения одного или более сигналов МР от части (22), причем параметры перемещения и/или вращения, описывающие движение части (22) тела (10), выводят из отслеживаемых данных, причем параметры последовательности импульсов корректируют, так чтобы скомпенсировать движение на изображении посредством сдвига или вращения при сканировании в соответствии с параметрами перемещения и/или вращения, при помощи блока (15) управления и/или блока (17) реконструкции на основании отслеживаемых данных,
c) получения совокупности данных сигнала МР посредством повторения этапов а) и b) несколько раз,
d) реконструирования одного или более МР изображений из совокупности данных сигнала МР.
9. Аппарат МРТ по п. 8, в котором отслеживаемые данные собраны посредством аппарата (1) МРТ в виде сигналов МР, сгенерированных или обнаруженных по меньшей мере одной РЧ микрокатушкой (20).
10. Аппарат МРТ по п. 8, также включающий в себя систему слежения за инструментом для сбора отслеживаемых данных на этапе а).
11. Информационный носитель, содержащий исполняемые компьютером команды для предписания компьютеру осуществлять способ магнитно-резонансной (МР) томографии движущейся части (22) тела (10) пациента, помещенной в область исследования аппарата (1) МРТ, содержащий этапы, на которых:
a) осуществляют сбор отслеживаемых данных от по меньшей мере одной микрокатушки, прикрепленной к интервенционному инструменту (19),
b) генерируют последовательность импульсов для получения одного или более сигналов МР от движущейся части тела пациента, причем параметры перемещения и/или вращения, описывающие движение части (22) тела (10), выводят из отслеживаемых данных, причем параметры последовательности импульсов корректируют, так чтобы скомпенсировать движение на изображении посредством сдвига или вращения при сканировании в соответствии с параметрами перемещения и/или вращения,
c) получают совокупность данных сигнала МР посредством повторения этапов а) и b) несколько раз,
d) реконструируют одно или более МР изображения из совокупности данных сигнала МР.
| US 2006074296 A1, 06.04.2006 | |||
| US 2005054913 A1, 10.03.2005 | |||
| US 2008114235 A1, 15.05.2008 | |||
| Л.А.Бокерия и др | |||
| "Диагностические возможности магнитно-резонансной томографии при проведении электрофизиологических процедур" | |||
| Анналы Аритмологии, N1, 2011. |

