Изобретение относится к горной промышленности и может быть использовано при разработке крутопадающих месторождений твердых полезных ископаемых с рудными телами с изменяемым углом падения.
Известна конструкция универсального проходческого агрегата, включающего отбойно-погрузочный орган с входными окнами, стрелу с центральным полым валом, поворотные устройства исполнительного органа, подвижный корпус с механизмом передвижения, гидропневмоэлеватор [1]. У агрегата отбойно-погрузочный орган обеспечивает одновременное разрушение массива и транспортировку полученной горной массы.
Конструкция агрегата не обеспечивает возможность работы в стесненных условиях и не позволяет вести разработку крутопадающих рудных тел открыто-подземным способом.
Известен способ разработки крутопадающих месторождений твердых полезных ископаемых и автоматизированный комплекс глубокой разработки, включающий консольную телескопическую стрелу с основной, промежуточной и головной секциями [2]. Разработка массива ведется составным рабочим органом, установленным на головной секции и управляемым автоматической системой с настраиванием режимов резания горной породы. Удаление горной массы из забоя ведется посредством вакуумной системы пневмотранспортирования с телескопическим пневмопроводом и воздушным насосом.
Конструкция оборудования автоматизированного комплекса глубокой разработки, включающая отдельные исполнительные органы для разрушения массива и транспортировки горной массы, не обеспечивает максимальной компактности и не позволяет работать в стесненных условиях при отработке крутопадающих рудных тел с изменяемым углом падения.
Наиболее близким по технической сущности является способ разработки крутопадающих месторождений твердых полезных ископаемых, включающий позиционирование автоматизированного комплекса глубокой разработки относительно забоя, приведение его в рабочее исходное состояние посредством механизма поворота телескопической стрелы в вертикальной плоскости с учетом направления залегания рудного тела [3]. Контроль параметров горной породы посредством датчиков контроля физико-механических характеристик горных пород, которые установлены на головной секции и связаны с автоматической системой управления автоматизированным комплексом глубокой разработки для настраивания режимов резания горной породы отбойно-погрузочным органом, жесткую фиксацию рабочего оборудования в выработке посредством гидравлических распорок. Удаление горной массы из забоя ведется посредством системы пневмотранспортирования.
Конструкция оборудования автоматизированного комплекса глубокой разработки, включающая консольную телескопическую стрелу не обеспечивает возможности разработки крутопадающих рудных тел с изменяемым углом падения.
Технический результат заключается в повышении производительности, надежности и расширении технологической эффективности отработки крутопадающих рудных тел с изменяемым углом падения.
Технический результат достигается тем, что в способе разработки крутопадающих месторождений твердых полезных ископаемых, включающем позиционирование автоматизированного комплекса глубокой разработки относительно забоя, приведение его в рабочее исходное состояние посредством механизма поворота телескопической стрелы в вертикальной плоскости с учетом направления залегания рудного тела, контроль параметров горной породы посредством датчиков контроля физико-механических характеристик горных пород, которые установлены на головной секции и связаны с автоматической системой управления автоматизированным комплексом глубокой разработки для настраивания режимов резания горной породы отбойно-погрузочным органом, жесткую фиксацию рабочего оборудования в выработке посредством гидравлической распорки и удаление горной массы из забоя посредством системы пневмотранспортирования с пневмопроводом, рабочее оборудование позиционируется над рудным телом с изменяемым углом падения посредством гидроцилиндра, связанного с телескопической стрелой, при этом после заглубления рабочего оборудования производится выдвижение гидравлической распорки для жесткой фиксации рабочего оборудования в выработке, осуществляется снятие жесткого соединения рабочего оборудования с телескопической стрелой и переход на гибкое соединение посредством каната, производится отработка забоя отбойно-погрузочным органом на величину выдвижения отбойно-погрузочного органа на головной секции, последовательно начинает втягиваться отбойно-погрузочный орган на головной секции, гидравлическая распорка ослабляется и растормаживается лебедка каната, в результате чего рабочее оборудование на салазках под действием силы тяжести перемещается по выработке, гидравлическая распорка вновь выдвигается и осуществляется процесс отработки рудного тела отбойно-погрузочным органом, находящимся в исходном состоянии, при этом разрыхленная горная масса удаляется из забоя посредством системы пневмотранспортирования с пневмопроводом, выполненным, из последовательно наращиваемых по мере отработки рудного тела, гибких секций.
Возможность формирования требуемой последовательности выполняемых действий предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
Способ разработки крутопадающих месторождений твердых полезных ископаемых изображен на чертежах.
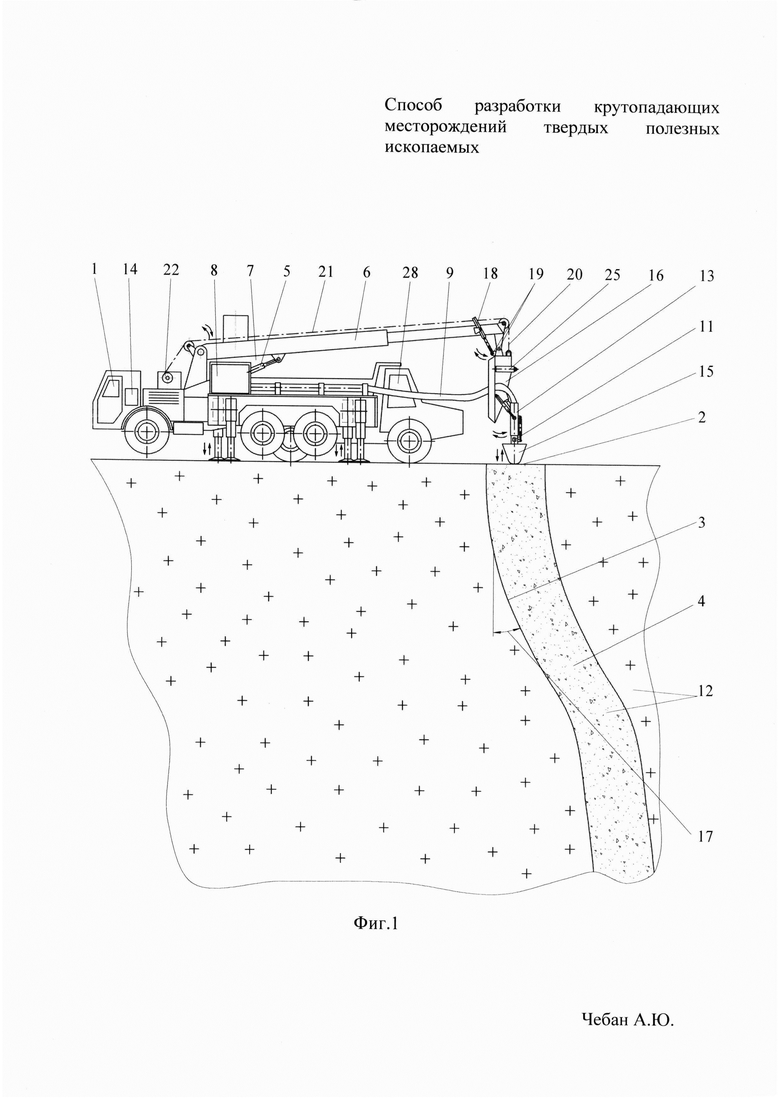
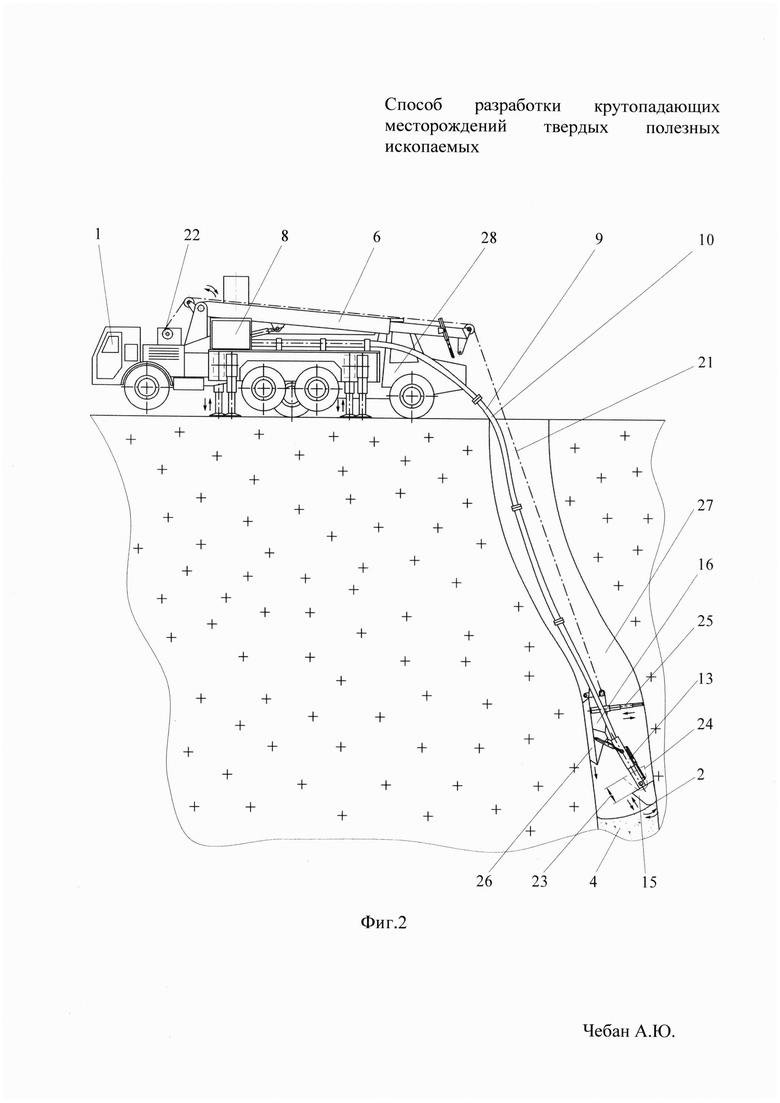
На фиг. 1 - общий вид автоматизированного комплекса глубокой разработки в исходном положении; на фиг. 2 - общий вид автоматизированного комплекса глубокой разработки в процессе отработки рудного тела с изменяемым углом падения.
Способ разработки крутопадающих месторождений твердых полезных ископаемых выполняется с помощью автоматизированного комплекса глубокой разработки 1. Автоматизированный комплекс глубокой разработки 1 позиционируется относительно забоя 2 с учетом направления залегания 3 рудного тела 4. Автоматизированный комплекс глубокой разработки 1 включает механизм поворота 5 телескопической стрелы 6 в вертикальной плоскости 7, систему пневмотранспортирования 8 с пневмопроводом 9, выполненным из последовательно наращиваемых по мере отработки рудного тела 4, гибких секций 10. Датчики контроля 11 физико-механических характеристик горных пород 12 установлены на головной секции 13 и связаны с автоматической системой управления 14 автоматизированного комплекса глубокой разработки 1 для настраивания режимов резания горной породы 12 отбойно-погрузочным органом 15. Рабочее оборудование 16 позиционируется над рудным телом 4 с изменяемым углом падения 17 посредством гидроцилиндра 18, связанного с телескопической стрелой 6. Рабочее оборудование 16 имеет кроме жесткого соединения 19 с телескопической стрелой 6 гибкое соединение 20 посредством каната 21, связанного с лебедкой 22. Отработка забоя 2 производится на величину выдвижения 23 отбойно-погрузочного органа 15 на головной секции 13 из исходного состояния 24. Рабочее оборудование 16 снабжено гидравлической распоркой 25, а также салазками 26, обеспечивающими перемещение по выработке 27. Система пневмотранспортирования 8 обеспечивает разгрузку горной массы в транспортное средство 28.
Способ разработки крутопадающих месторождений твердых полезных ископаемых реализуется следующим образом.
Осуществляется позиционирование автоматизированного комплекса глубокой разработки 1 относительно забоя 2, приведение его в рабочее исходное состояние посредством механизма поворота 5 телескопической стрелы 6 в вертикальной плоскости 7 с учетом направления залегания 3 рудного тела 4. Контроль параметров горной породы 12 производится посредством датчиков контроля 11 физико-механических характеристик горных пород 12, которые установлены на головной секции 13 и связаны с автоматической системой управления 14 автоматизированным комплексом глубокой разработки 1 для настраивания режимов резания горной породы 12 отбойно-погрузочным органом 15. Жесткую фиксацию рабочего оборудования 16 в выработке 27 осуществляют посредством гидравлической распорки 25. Удаление горной массы из забоя 2 производится посредством системы пневмотранспортирования 8 с пневмопроводом 9. Рабочее оборудование 16 позиционируется над рудным телом 4 с изменяемым углом падения 17 посредством гидроцилиндра 18, связанного с телескопической стрелой 6. После заглубления рабочего оборудования 16 производится выдвижение гидравлической распорки 25 для жесткой фиксации рабочего оборудования 16 в выработке 27. Осуществляется снятие жесткого соединения 19 рабочего оборудования 16 с телескопической стрелой 6 и переход на гибкое соединение 20 посредством каната 21. Производится отработка забоя 2 отбойно-погрузочным органом 15 на величину выдвижения 23 отбойно-погрузочного органа 15 на головной секции 13. После чего последовательно начинает втягиваться отбойно-погрузочный орган 15 на головной секции 13, гидравлическая распорка 25 ослабляется и растормаживается лебедка 22 каната 21. Рабочее оборудование 16 на салазках 26 под действием силы тяжести перемещается по выработке 27. Гидравлическая распорка 25 вновь выдвигается и осуществляется процесс отработки рудного тела 4 отбойно-погрузочным органом 15, находящимся в исходном состоянии 24. Разрыхленная горная масса удаляется из забоя 2 посредством системы пневмотранспортирования 8 с пневмопроводом 9, выполненным, из последовательно наращиваемых по мере отработки рудного тела 4, гибких секций 10. Система пневмотранспортирования 8 обеспечивает разгрузку горной массы в транспортное средство 28.
Способ повышает производительность, надежность и расширяет технологическую эффективность разрушения пород различной степени крепости при отработке крутопадающих рудных тел с изменяемым углом падения. Способ обеспечивает повышение безопасности ведения добычных работ и снижение экологической нагрузки на окружающую среду.
Источники информации:
1. Патент РФ №2172836 от 27.08.2001. Универсальный проходческий агрегат.
2. Патент РФ №2541992 от 20.02.2015. Способ разработки крутопадающих месторождений твердых полезных ископаемых и автоматизированный комплекс глубокой разработки.
3. Патент РФ №2645697 от 27.02.2018. Способ разработки крутопадающих месторождений твердых полезных ископаемых
Изобретение относится к горной промышленности и может быть использовано при разработке крутопадающих месторождений твердых полезных ископаемых с рудными телами с изменяемым углом падения. Способ разработки крутопадающих месторождений твердых полезных ископаемых, включающий позиционирование автоматизированного комплекса глубокой разработки относительно забоя, приведение его в рабочее исходное состояние посредством механизма поворота телескопической стрелы в вертикальной плоскости с учетом направления залегания рудного тела. Рабочее оборудование позиционируется над рудным телом с изменяемым углом падения посредством гидроцилиндра, связанного с телескопической стрелой, при этом после заглубления рабочего оборудования производится выдвижение гидравлической распорки для жесткой фиксации рабочего оборудования в выработке. Осуществляется снятие жесткого соединения рабочего оборудования с телескопической стрелой и переход на гибкое соединение посредством каната, производится отработка забоя отбойно-погрузочным органом на величину выдвижения отбойно-погрузочного органа на головной секции. Последовательно начинает втягиваться отбойно-погрузочный орган на головной секции, гидравлическая распорка ослабляется и растормаживается лебедка каната, в результате чего рабочее оборудование на салазках под действием силы тяжести перемещается по выработке, гидравлическая распорка вновь выдвигается и осуществляется процесс отработки рудного тела отбойно-погрузочным органом, находящимся в исходном состоянии. Разрыхленная горная масса удаляется из забоя посредством системы пневмотранспортирования с пневмопроводом, выполненным из последовательно наращиваемых по мере отработки рудного тела гибких секций. Технический результат заключается в повышении производительности, надежности и расширении технологической эффективности отработки крутопадающих рудных тел с изменяемым углом падения. 2 ил.
Способ разработки крутопадающих месторождений твердых полезных ископаемых, включающий позиционирование автоматизированного комплекса глубокой разработки относительно забоя, приведение его в рабочее исходное состояние посредством механизма поворота телескопической стрелы в вертикальной плоскости с учетом направления залегания рудного тела, контроль параметров горной породы посредством датчиков контроля физико-механических характеристик горных пород, которые установлены на головной секции и связаны с автоматической системой управления автоматизированным комплексом глубокой разработки для настраивания режимов резания горной породы отбойно-погрузочным органом, жесткую фиксацию рабочего оборудования в выработке посредством гидравлической распорки и удаление горной массы из забоя посредством системы пневмотранспортирования с пневмопроводом, отличающийся тем, что рабочее оборудование позиционируется над рудным телом с изменяемым углом падения посредством гидроцилиндра, связанного с телескопической стрелой, при этом после заглубления рабочего оборудования производится выдвижение гидравлической распорки для жесткой фиксации рабочего оборудования в выработке, осуществляется снятие жесткого соединения рабочего оборудования с телескопической стрелой и переход на гибкое соединение посредством каната, производится отработка забоя отбойно-погрузочным органом на величину выдвижения отбойно-погрузочного органа на головной секции, последовательно начинает втягиваться отбойно-погрузочный орган на головной секции, гидравлическая распорка ослабляется и растормаживается лебедка каната, в результате чего рабочее оборудование на салазках под действием силы тяжести перемещается по выработке, гидравлическая распорка вновь выдвигается и осуществляется процесс отработки рудного тела отбойно-погрузочным органом, находящимся в исходном состоянии, при этом разрыхленная горная масса удаляется из забоя посредством системы пневмотранспортирования с пневмопроводом, выполненным из последовательно наращиваемых по мере отработки рудного тела гибких секций.
| Способ разработки крутопадающих месторождений твердых полезных ископаемых | 2017 |
|
RU2645697C1 |
| УНИВЕРСАЛЬНЫЙ ПРОХОДЧЕСКИЙ АГРЕГАТ | 1998 |
|
RU2172836C2 |
| МОБИЛЬНАЯ БУРОВАЯ ДОБЫВАЮЩАЯ УСТАНОВКА ПРЯМОГО И ОБРАТНОГО ДЕЙСТВИЯ | 2006 |
|
RU2310731C1 |
| СПОСОБ РАЗРАБОТКИ КРУТОПАДАЮЩИХ МЕСТОРОЖДЕНИЙ ТВЕРДЫХ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ГЛУБОКОЙ РАЗРАБОТКИ | 2014 |
|
RU2541992C1 |
| СПОСОБ ДОБЫЧИ РУДЫ ИЗ ТОНКИХ КРУТОНАКЛОННЫХ ЖИЛ | 2014 |
|
RU2563004C1 |
| US 6814167 B2, 09.11.2004. | |||

