Настоящее изобретение касается сухопутного транспорта и может применяться в двух, трех и четырехколесных транспортных средствах, таких как автомобили, мотоциклы, скутеры, трициклы и квадроциклы, оснащенных как двигателями внутреннего сгорания, так и электрическими двигателями.
Изобретение относится к рубрике F02D 11/02 МКИ.
Известны технические решения, аналогичные предлагаемому, как, например, классический узел акселератора мотоцикла с рукояткой газа, установленной с возможностью вращательного движения относительно руля, конструктивно связанной с дроссельной заслонкой двигателя мотоцикла при помощи механической или иной связи и подпружиненной возвратной пружиной с возможностью автоматического возврата в положение минимальной мощности двигателя за счет создания на рукоятке газа возвращающего момента.
Основным недостатком данного решения является необходимость совмещения в одной рукоятке трех функций:
1. Сохранения положения тела водителя относительно мотоцикла.
2. Управления по курсу.
3. Управления ускорением.
С одной стороны это вынужденное совмещение существенно усложняет освоение техники езды на мотоцикле, а с другой - снижает безопасность самой езды, что особенно сильно проявляется при существенном увеличении массы мотоцикла и мощности двигателя.
Следствием описанной проблемы является неизбежный компромисс при настройке оптимальной жесткости возвратной пружины, так как при избытке возвращающего момента несколько улучшается контроль над мощностью двигателя, но наступает быстрое утомление мышц предплечья и плеча и снижается удобство езды с постоянной скоростью, а при недостатке возвращающего момента наряду с большим удобством при длительной езде возникает серьезная опасность «самооткручивания» рукоятки газа из-за инерции «отстающей» от движения мотоцикла верхней части тела водителя.
Опасность заключается в том, что при высокой мощности и приемистости двигателя ситуация в некоторых случаях развивается лавинообразно из-за возникающей в системе «мотоцикл-водитель» положительной обратной связи, в соответствие с которой выходной сигнал - продольное ускорение мотоцикла при неосознанном участии водителя усиливает входной - степень открытия дроссельной заслонки. Известны случаи, когда неопытные мотоциклисты получали несовместимые с жизнью травмы в течение одной-полутора секунд после резкого трогания с места в результате неконтролируемого движения мотоцикла в сторону стены или другого препятствия. Динамика процесса «самооткручивания» рукоятки газа изображена на Фиг. 3.
Интересно, что в начале XX века ставшая затем стандартной вращающаяся рукоятка газа изначально была установлена на руль мотоцикла, первоначальная форма «рогов» которого обеспечивала параллельность осей обоих рукояток, поэтому сила инерции, действующая на верхнюю часть тела водителя при ускорении мотоцикла, не могла привести к эффекту «самооткручивания» рукоятки газа. Затем вращающаяся рукоятка газа была перенесена на рули с рогами современного типа, что в сочетании с многократно возросшей мощностью двигателей и привело к возникновению проблемы «самооткручивания».
Помимо эффекта «самооткручивания» рукоятки газа, при котором изменение параметров движения мотоцикла носит однонаправленный характер, недостаточный возвращающий момент на рукоятке газа может вызывать также развитие автоколебаний в системе «водитель-мотоцикл» при проезде поперечных неровностей. Развитие этих колебаний становится возможным за счет того, что при наезде на первую неровность вертикальная перегрузка увлекает предплечье водителя вниз, что приводит к неконтролируемому увеличению угла открытия дроссельной заслонки, рывку мотоцикла вперед и еще более резкому проезду следующей неровности, сопровождающемуся еще более резким пиком вертикальной перегрузки, соответственно более резким открытием дросселя и так далее вплоть до падения мотоциклиста.
Важно отметить, что в «классической» конструкции узла акселератора мотоцикла острота описанных выше проблем существенным образом снижается благодаря присутствию значительных сил трения в тросовом приводе дроссельной заслонки, в результате действия которых график возвращающего момента на рукоятке газа имеет вид петли гистерезиса.
В результате, с одной стороны, открытие рукоятки газа на некоторый угол почти всегда требует несколько большего усилия, чем ее удержание в заданном положении, что несколько снижает вероятность «самооткручивания» рукоятки газа при разгоне и одновременно уменьшает утомляемость водителя при длительной езде с постоянной скоростью. С другой стороны, наличие гистерезиса исключает постоянное вращение рукоятки газа строго в фазе с колебаниями вертикальной перегрузки при проезде поперечных неровностей, что существенно уменьшает развитие описанных выше автоколебаний в системе управления мотоцикла. График зависимости возвращающего момента от угла поворота рукоятки газа с тросовым приводом изображен на Фиг. 1 Чертежей.
Именно связанная с этими соображениями необходимость сохранения свойственного тросовому приводу, удобного и привычного для водителей гистерезиса возвращающего момента в ряде случае возникает при переходе на полностью электронное управление двигателем, включающее в себя электропривод дроссельной заслонки. В качестве примеров решения данной проблемы можно привести следующие устройства:
1. «Модуль рукоятки газа», описание которого приводится в патенте США №7237452 от 3.07.2007. Данное устройство предназначено для установки на колесном транспортном средстве, имеющем, как минимум, два колеса, при этом, по меньшей мере, одно из колес является ведущим, тормозную систему, а также двигатель с выходным валом и орган управлении тягой, установленный с возможностью вращения или качания относительно своей оси, конструктивно связанный с двигателем с возможностью плавного регулирования мощности двигателя и снабженный возвратной пружиной, установленный с возможностью автоматического возврата органа управления тягой в положение, соответствующее минимальной мощности двигателя за счет создания на органе управления тягой возвращающего момента.
Кроме того, данное устройство содержит корпус, зубчатую передачу и датчик положения органа управления, а возвратная пружина выполнена спиральной. При этом датчик положения и спиральная пружина установлены в корпусе, рукоятка газа связана с датчиком положения при помощи зубчатой передачи, а конструктивное исполнение загружателя за счет использования начального поджатия спиральной пружины обеспечивает увеличение силы трения и создает эффект гистерезиса, подобный работе классического тросового привода дроссельной заслонки.
2. «Контроллер рукоятки газа с эффектом гистерезиса», описание которого приводится в патенте США №6978694 от 27.12.2005. Данное устройство содержит цилиндрический корпус, вал, гильзу, поршень, пружину, втулку, ролик и датчик положения рукоятки газа, при этом поршень снабжен гибкими ребрами и установлен внутри полой рукоятки с натягом и с возможностью продольного перемещения и поджатия пружины, втулка выполнена со спиральным пазом и кинематически связана с гильзой, вал связан с рукояткой газа, а ролик установлен на валу с возможностью преобразования вращательного движения рукоятки газа в поступательное перемещение поршня, трение которого о внутреннюю поверхность рукоятки руля при возврате рукоятки газа в исходное положение обеспечивает необходимый уровень «задержки» по усилию закрытия дроссельной заслонки
Общим недостатком как классического тросового привода дроссельной заслонки, так и различных вариантов «имитации» характера его работы при помощи специальных механических устройств является незамкнутость контура управления ускорением, поскольку текущая величина возвращающего момента на рукоятке или педали газа позволяет судить лишь о положении дроссельной заслонки, то есть о промежуточном параметре, весьма нелинейно связанным с целевым параметром, которым и стремится управлять водитель - с величиной продольного ускорения транспортного средства. Другими словами, возвращающий момент на рукоятке газа не является реактивным моментом.
В свою очередь, нелинейность связи между возвращающим моментом на органе управления и величиной продольного ускорения возникает по следующим причинам.
1. Нелинейностью кривой крутящего момента двигателя.
2. Диапазоном передаточных чисел трансмиссии.
3. Изменением величины коэффициента сцепления ведущего колеса или колес с дорожным покрытием.
4. Гистерезисом привода дроссельной заслонки.
5. Нелинейностью отклика двигателя, вызванной особенностями программного обеспечения блока управления, например, обусловленными экологическими требованиями.
Накладываясь друг на друга, эти факторы зачастую приводят в частичной или полной дезориентации водителя и его неспособности оптимально регулировать мощность двигателя, что в сочетании с высокой удельной мощностью, характерной для современных мотоциклов, способно существенно снизить безопасность движения.
По сравнению с рассмотренными выше проблемами управления ускорением мотоцикла, как пример более удачной и безопасной концепции управления продольной динамикой колесного транспортного средства можно отметить автомобиль, оснащенный стандартным узлом акселератора с подвесной или напольной педалью.
При эксплуатации автомобиля более устойчивое, по сравнению с мотоциклом, положение тела водителя относительно всех органов управления, меньшая величина удельной мощности и наличие переднего или полного привода существенно снижают актуальность описанной выше проблемы несоответствия величин возвращающего момента на органе управления тягой и продольного ускорения автомобиля.
Тем не менее, при вождении мощных автомобилей, особенно имеющих задние ведущие колеса, определенный дискомфорт вызывается очевидным несоответствием между идеально настроенными рулевым управлением и тормозной системой, обладающими почти идеальными силовыми обратными связями и незамкнутым контуром управления разгонной динамикой, требующим привыкания и выработки «компенсаторного» навыка, который можно определить как «игру» газом.
Особенно остро проблема эффективного контроля мощности двигателя стоит перед производителями мощных электромобилей, поскольку приращение мощности двигателя на градус поворота педали акселератора в данном случае не зависит от оборотов двигателя, а практически отсутствующее звуковое сопровождение не позволяет водителю использовать акустическую обратную связь при управлении продольной динамикой.
Из уровня техники известны также многорежимные ограничители крутящего момента, применяемые на мотоциклах и автомобилях различных производителей и содержащие дополнительные переключатели, позволяющие настраивать уровень развиваемой мощности и приемистости двигателя для различных дорожных условий. Помимо «стандартного» режима, большинство из этих систем имеют «мокрый» режим, рассчитанный на езду по влажному или мокрому от дождя покрытию и в некоторых случаях «спортивный» режим, рассчитанный на получение максимального удовольствия от динамики.
Недостатком подобных многорежимных ограничителей является необходимость выполнения дополнительных действий и для активации того или иного режима, а также последующей реадаптации водителя к изменившемуся характеру разгонной динамики, причем адаптация к большему доступному уровню мощности всегда происходит сложнее и сопряжена с некоторым риском.
Из уровня техники известны также антипробуксовочные системы, называемые также системами контроля тяги. Обобщенное описание данных систем приводится в сети Интернет по адресу:
https://ru.wikipedia.org/wiki/%D0%9F%D1%80%D0%BE%D1%82%D0%B8%D0%B2%D0%BE%D0%B1%D1%83%D0%BA%D1%81%D0%BE%D0%B2%D0%BE%D1%87%D0%BD%D0%B0%D1%8F %D1%81%D0%B8%D1%81%D1%82%D0%B5%D0%BC%D0%B0
Антипробуксовочная система по совокупности своих конструктивных признаком является ближайшим аналогом предложенного изобретения, содержит электронный блок управления, по меньшей мере, один датчик угловой скорости и установлена на колесном транспортном средстве, включающем в себя, как минимум, два колеса, при этом, по меньшей мере, одно из колес является ведущим, тормозную систему, а также двигатель и орган управлении тягой, при этом орган управления тягой установлен с возможностью колебательного или вращательного движения и конструктивно связан с двигателем с возможностью плавного регулирования мощности двигателя, датчик угловой скорости установлен на ведущем колесе, а электронный блок управления конструктивно связан с двигателем и с, по меньшей мере, одним датчиком угловой скорости, выполнен с возможностью вычисления величины углового ускорения, по меньшей мере, одного ведущего колеса и уменьшения мощности двигателя при повышении величины углового ускорения, по меньшей мере, одного ведущего колеса, содержащую электронный блок управления, по меньшей мере, один датчик угловой скорости и установленную на колесном транспортном средстве, включающем в себя, как минимум, два колеса, при этом, по меньшей мере, одно из колес является ведущим, тормозную систему, а также двигатель и орган управлении тягой, при этом орган управления тягой выполнен в виде качающейся педали или вращающейся рукоятки, и конструктивно связан с двигателем с возможностью плавного регулирования мощности двигателя, при этом датчик угловой скорости установлен на ведущем колесе, а электронный блок управления конструктивно связан с двигателем и с, по меньшей мере, одним датчиком угловой скорости, выполнен с возможностью вычисления величины углового ускорения, по меньшей мере, одного ведущего колеса и уменьшения мощности двигателя при повышении величины углового ускорения, по меньшей мере, одного ведущего колеса.
Принцип действия известных антипробуксовочных систем заключается в следующем. При помощи датчиков угловой скорости, установленных на колесах, электронный блок отслеживает скорость вращения колес при разгоне автомобиля. В случае, если обнаруживается резкое возрастание скорости вращения (угловое ускорение) одного из ведущих колес (что означает потерю сцепления и начало пробуксовки), электронный блок управления предпринимает меры для снижения тяги и (или) притормаживания этого колеса. Для снижения тяги могут (в зависимости от реализации системы) использоваться следующие методы:
1. Прекращение искрообразования в одном или нескольких цилиндрах двигателя;
2. Уменьшение подачи топлива в один или несколько цилиндров;
3. Частичное прикрытие дроссельной заслонки (если к ней подключено электронное управление);
4. Уменьшение угла опережения зажигания.
Общим недостатком известных антипробуксовочных систем является то, что информация об их срабатывании в лучшем случае выводится на панель приборов виде мигающей лампы или пиктограммы и никак не отображается непосредственно на органе управления тягой, то есть не оказывает влияния на входной сигнал (положение органа управления тягой) и контур управления остается разомкнутым. В результате срабатывание антипробуксовочной системы ощущается водителем как «провал» мощности двигателя. Проблема в том, что, ощутив падение ускорения, не наблюдающий мигания контрольной лампы водитель в первый момент рефлекторно дает команду на увеличение подачи топлива, что еще больше увеличивает рассогласование между задаваемым электроникой и водителем уровнями мощности двигателя, постепенная «программная» компенсация происходит на временном отрезке от трех до десяти секунд и связана с частичной потерей продольной динамики.
Важно также отметить, что сами по себе ограничители крутящего момента и антипробуксовочные системы необходимы, в том числе, как мера борьбы с негативными последствиями уже упомянутой выше проблемы незамкнутости контура управления ускорением, выраженной в несоответствии возвращающего момента на органе управления тягой величине углового ускорения ведущих колес и продольного ускорения транспортного средства.
Таким образом, при разработке предложенной конструкции системы контроля тяги была поставлена основная задача улучшения качества и удобства управления разгонной динамикой энерговооруженных колесных транспортных средств за счет введения в систему управления мощностью двигателя отрицательной обратной связи с целью замыкания контура управления.
Дополнительной задачей было обеспечение возможности эффективного контроля момента начала пробуксовки ведущего колеса или колес без разобщения двигателя и органа управления тягой.
Дополнительной задачей была экономия мускульной силы водителя при движении с постоянной скоростью при сохранении эффективного и безопасного контроля мощности двигателя.
Дополнительной задачей было обеспечение простоты и надежности устройства, а также его невмешательства в существующие системы управления мощностью двигателя, что упрощает его адаптацию к известным конструкциям автомобилей и мотоциклов.
Цель изобретения - качественное повышение удобства и безопасности вождения энерговооруженных колесных транспортных средств, при одновременной максимальной реализации их динамических возможностей и исключении периодического «отстранения» водителя от процесса управления разгонной динамикой.
Для достижения поставленной цели в известную систему контроля тяги, содержащую электронный блок управления, по меньшей мере, один датчик угловой скорости и установленную на колесном транспортном средстве, включающем в себя, как минимум, два колеса, при этом, по меньшей мере, одно из колес является ведущим, тормозную систему, а также двигатель и орган управлении тягой, при этом орган управления тягой установлен с возможностью колебательного или вращательного движения и конструктивно связан с двигателем с возможностью плавного регулирования мощности двигателя, датчик угловой скорости установлен на ведущем колесе, а электронный блок управления конструктивно связан с двигателем и с, по меньшей мере, одним датчиком угловой скорости, выполнен с возможностью вычисления величины углового ускорения, по меньшей мере, одного ведущего колеса и уменьшения мощности двигателя при повышении величины углового ускорения, по меньшей мере, одного ведущего колеса, были включены следующие конструктивные признаки: система контроля тяги дополнительно содержит актуатор обратной связи, конструктивно связанный с электронным блоком управления, кинематически связанный с органом управления тягой и установленный с возможностью создания на органе управления тягой реактивного момента, величина которого увеличивается с ростом величины углового ускорения, по меньшей мере, одного ведущего колеса и соответствует заложенной в электронный блок управления функциональной зависимости реактивного момента от величины углового ускорения, по меньшей мере, одного ведущего колеса.
Кроме того, актуатор обратной связи выполнен в виде соленоида, обмотка которого конструктивно связана с электронным блоком управления, а выходное звено актуатора выполнено в виде сердечника соленоида.
Кроме того, актуатор обратной связи выполнен в виде моментного электродвигателя, конструктивно связанного с электронным блоком управления, при этом выходное звено актуатора выполнено в виде ротора моментного электродвигателя.
Кроме того, актуатор обратной связи выполнен в виде мотор-редуктора с моментным электродвигателем, конструктивно связанным с электронным блоком управления, при этом выходное звено актуатора выполнено в виде выходного вала мотор-редуктора.
Кроме того, кинематическая связь выходного звена актуатора обратной связи с органом управления реализована при помощи шкивов и тросов в оболочке.
Кроме того, кинематическая связь выходного звена актуатора обратной связи с органом управления реализована за счет исполнения органа управления и выходного звена в виде единого конструктивного элемента
Кроме того, кинематическая связь выходного звена актуатора обратной связи с органом управления выполнена в виде ременной передачи с зубчатым ремнем.
Кроме того, орган управления тягой снабжен возвратной пружиной, установленной с возможностью автоматического возврата органа управления тягой и выходного звена актуатора обратной связи в положение, соответствующее минимальной мощности двигателя.
Кроме того, система контроля тяги дополнительно содержит регулятор-выключатель, конструктивно связанный с электронным блоком управления с возможностью полного отключения актуатора обратной связи либо ступенчатого или плавного регулирования градиента реактивного момента на органе управления тягой.
Кроме того, при различии в показаниях датчиков угловой скорости конструктивное исполнение электронного блока управления обеспечивает изменение реактивного момента на органе управления тягой в соответствии с наибольшим вычисленным значением углового ускорения.
Кроме того, система контроля тяги дополнительно содержит акселерометр, конструктивно связанный с электронным блоком управления и установленный на транспортном средстве с возможностью косвенного определения величины углового ускорения, по меньшей мере, одного ведущего колеса через величину продольного ускорения транспортного средства, при этом конструктивное исполнение электронного блока управления обеспечивает изменение реактивного момента на органе управления тягой на основании показаний акселерометра до достижения, по меньшей мере, одним ведущим колесом пороговой скорости вращения, а после достижения пороговой скорости вращения - на основании показаний датчика угловой скорости либо сравнения показаний акселерометра и датчика угловой скорости.
Кроме того, система контроля тяги дополнительно содержит датчик положения, кинематически связанный с органом управления тягой и конструктивно связанный с электронным блоком управления с возможностью изменения величины реактивного момента в зависимости от положения органа управления тягой.
Кроме того, тормозная система включает в себя установленные на колесах, по меньшей мере, два датчика угловой скорости, при этом, по меньшей мере, один из датчиков угловой скорости тормозной системы конструктивно связан с электронным блоком управления.
Благодаря введенным конструктивным признакам, повышается безопасность движения и упрощается процесс управления мотоциклами и автомобилями.
Настоящее изобретение иллюстрируется чертежами, на которых обозначено:
Фиг. 1 - Зависимость возвращающего момента от положения органа управления тягой в известной конструкции рукоятки газа.
Фиг. 2 - Зависимость реактивного момента от положения органа управления тягой в предложенной системе контроля тяги.
Фиг. 3 - График типичной реакции мотоцикла с известной конструкцией рукоятки газа на случайное «откручивание» рукоятки газа при отсутствии пробуксовки ведущего колеса.
Фиг. 4 - График реакции мотоцикла с предложенной системой контроля тяги на случайное «откручивание» рукоятки газа без увеличения управляющего момента.
Фиг. 5 - График реакции мотоцикла с предложенной системой контроля тяги на намеренное откручивание рукоятки газа, подтверждаемое увеличением управляющего момента.
Фиг. 6 - График реакции мотоцикла с предложенной системой контроля тяги на пробуксовку ведущего колеса.
Фиг. 7 - Графики функциональной зависимости реактивного момента от углового ускорения ведущего колеса при различных режимах работы регулятора-выключателя по П.9 Формулы.
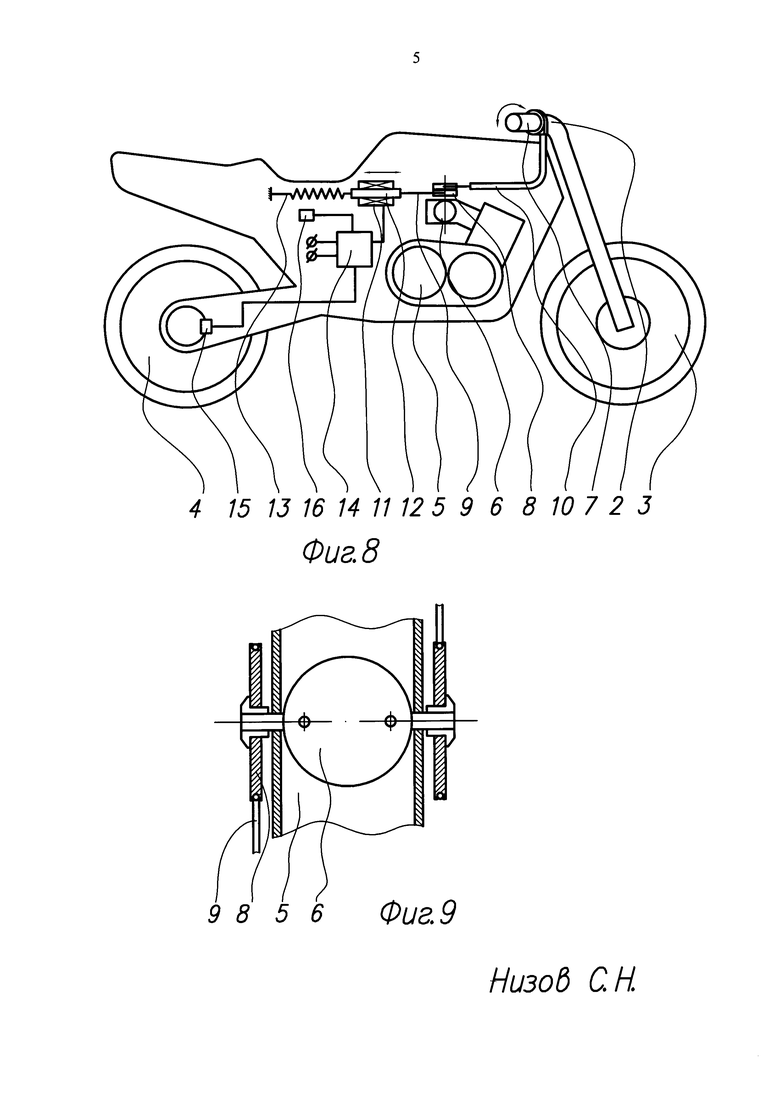
Фиг. 8 - Общий вид мотоцикла, оснащенного системой контроля тяги по П.2, 5, 8, 11 Формулы.
Фиг. 9 - Разрез узла дроссельной заслонки мотоцикла по П.5 Формулы.
Фиг. 10 - Разрез узла рукоятки газа по П. 3, 6, 8, 9, 12 Формулы.
Фиг. 11 - Общий вид автомобиля, оснащенного системой контроля тяги по П.4, 7-12 Формулы.
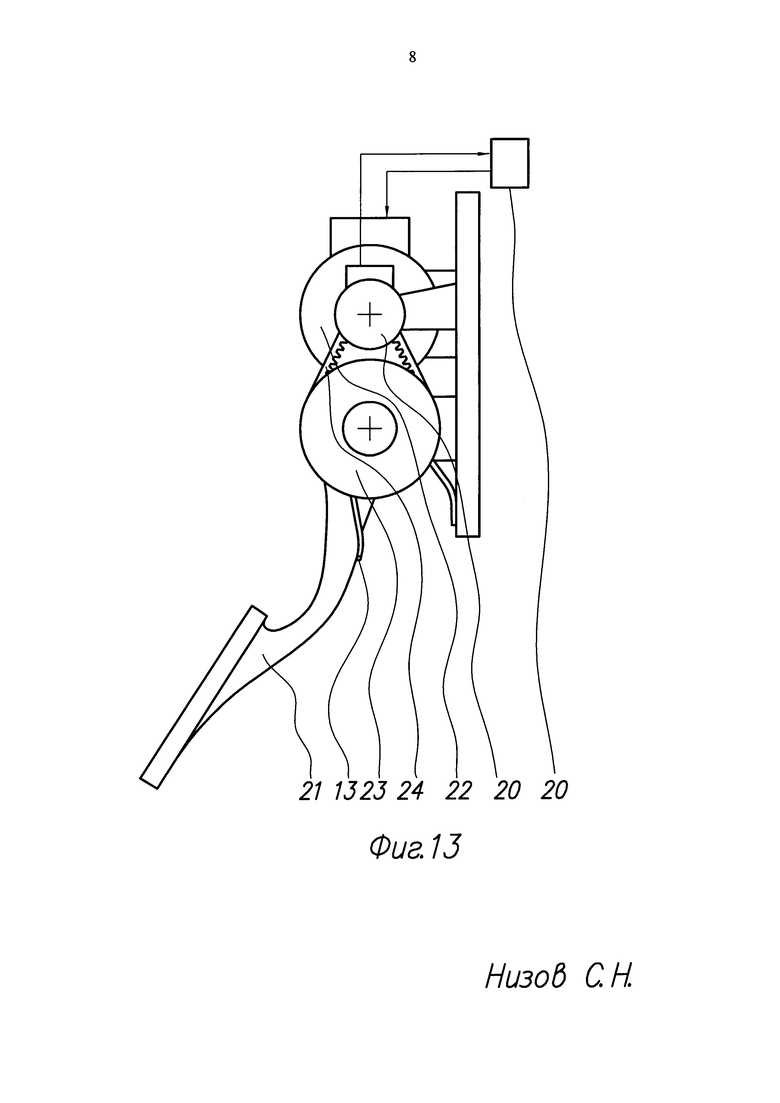
Фиг. 12 - Вид сбоку узла педали акселератора с актуатором обратной связи по П. 4, 7, 8, 12 Формулы.
Фиг. 13 - Вид сзади узла педали акселератора с актуатором обратной связи по П.4, 7, 8, 12 Формулы.
Вариант системы контроля тяги, включающий в себя признаки П. 2, 5, 8, 11 Формулы, установлен на мотоцикле, включающем в себя раму (1), руль (2), управляемое колесо (3), ведущее колесо (4), двигатель (5) с дроссельной заслонкой (6), и содержит орган управления тягой, выполненный в виде рукоятки газа (7), установленной на руле (2) с возможностью вращения относительно продольной оси и соединенной с дроссельной заслонкой (6) при помощи шкива (8) и троса (9) в оболочке (10). Кроме этого, система контроля тяги содержит также актуатор, выполненный в виде соленоида (11) с сердечником (12) и возвратной пружиной (13), также соединенный с дроссельной заслонкой (6) при помощи троса (9) и шкива (8).
Кроме того, система контроля тяги содержит также электронный блок управления (14), датчик угловой скорости (15), и акселерометр (16), при этом электронный блок управления (14) и акселерометр (16) установлены на раме (1), датчик угловой скорости установлен на заднем ведущем колесе (4), а электронный блок управления конструктивно связан с соленоидом (11), датчиком угловой скорости (15) и акселерометром (16). Данный вариант реализации предложенного изобретения изображен на Фиг. 8.
Вариант системы контроля тяги, включающий в себя признаки П. 3, 6, 8, 9, 12 Формулы также описан применительно к мотоциклу и отличается от описанного выше тем, что содержит моментный двигатель (17) с ротором (18), регулятор-выключатель (19) и датчик положения (20), моментный двигатель (17) установлен на руле (2) соосно с рукояткой газа (7), ротор (18) моментного двигателя (17) выполнен как одно целое с рукояткой газа (7), регулятор выключатель (19) установлен на руле (2), датчик положения (20) установлен внутри рукоятки газа (7) с возможностью отображения ее текущего положения, при этом моментный двигатель (17) и регулятор-выключатель (19) конструктивно связаны с электронным блоком управления (14), а датчик положения конструктивно связан с двигателем (5) и электронным блоком управления (14).
Данный вариант реализации предложенного изобретения изображен на Фиг. 10.
Вариант системы контроля тяги, включающий в себя признаки П. 4, 7-12 Формулы, рассматривается установленным на заднеприводном автомобиле, включающем в себя управляемые колеса (3), ведущие колеса (4) и двигатель (5). Система контроля тяги при этом содержит, по меньшей мере, два датчика угловой скорости (15) расположенных на ведущих колесах (4) и связанных с электронным блоком управления (14). Орган управления тягой выполнен в виде педали акселератора (21) установленной с возможностью колебательного движения, снабженной датчиком положения (20) и поджатой возвратной пружиной (13). Кроме того, система контроля тяги также мотор-редуктор (22) с моментным двигателем (17), соединенный с педалью акселератора (21) при помощи ременной передачи (23) с зубчатым ремнем (24) и конструктивно связанный с электронным блоком управления (14). Данный вариант реализации предложенного изобретения изображен на Фиг. 11-13.
Кроме того, в качестве датчиков угловой скорости (15) могут быть использованы датчики антиблокировочной системы тормозов (АБС).
Вариант системы контроля тяги, включающий в себя признаки П. 2, 5, 8, 11 Формулы, работает следующим образом:
При движении с постоянной скоростью и торможении мотоцикл не имеет каких-либо особенностей в управлении, так как при малых величинах углового ускорения ведущего колеса (4) актуатор обратной связи практически не создает реактивного момента и никак не вмешивается в процесс управления мощностью двигателя.
При необходимости активного ускорения с места, водитель отпускает сцепление и более активно поворачивает рукоятку газа (7), быстро открывая дроссельную заслонку (6) на значительный угол, что приводит к увеличению крутящего момента двигателя (5) и резкому ускорению мотоцикла. В начальный момент движения, когда скорость вращения ведущего колеса (4) недостаточна для работы датчика угловой скорости (15), электронный блок управления (14) вычисляет необходимую величину реактивного момента исходя из показаний акселерометра (16), что исключает задержку срабатывания обратной связи и уменьшает вероятность выхода мотоцикла из под контроля водителя. Как только частота вращения ведущего колеса (4) достигает порогового значения, электронный блок управления (14) переключается на датчик угловой скорости (15) или начинает сравнивать показания акселерометра (16) и датчика угловой скорости (15).
Независимо от источника сигнала, срабатывание обратной связи в системе контроля тяги происходит следующим образом: электронный блок управления (14) вычисляет текущую величину углового ускорения ведущего колеса (4) и подает на соленоид (11), напряжение, соответствующее заложенной в электронный блок управления (14) функциональной зависимости реактивного момента от углового ускорения ведущего колеса, что создает МДС, которая, воздействуя на сердечник (12) соленоида (11), через тросы (9) и шкивы (8) передается на дроссельную заслонку (6) и рукоятку газа (7) в виде реактивного момента, суммирующегося с возвращающим моментом, создаваемым возвратной пружиной (13). Диаграмма зависимости реактивного момента на рукоятке газа (7) от ее положения изображена на Фиг. 2. При этом реактивный момент соответствует заштрихованному полю диаграммы.
Далее, если к рукоятке газа (7) водителем своевременно не будет приложен управляющий момент, соответствующий желаемому уровню ускорения мотоцикла, то под действием МДС сердечник (12) отходит назад, частично закрывая при этом дроссельную заслонку (6) и поворачивая на закрытие рукоятку газа (7) вместе с рукой водителя. То есть, если водитель не «подтвердит» намерение резко ускориться, увеличив управляющий момент, а всего лишь быстро открутит рукоятку газа (7), мотоцикл уже через 0,2-0,3 секунды после начала движения самостоятельно частично уберет газ и либо заглохнет, либо плавно тронется с места вместо рывка вперед. Динамика данного процесса схематически изображена на Фиг. 4, изображающей кривые угла поворота рукоятки газа - дельта (25), углового ускорения - е (26) и реактивного момента - Мр (27) на общей временной шкале.
В результате срабатывания отрицательной обратной связи полностью исключается выход мотоцикла из под контроля даже относительно неопытного водителя, которого при известном исполнении системы контроля тяги дезориентирует именно незамкнутость контура управления мощностью, субъективно выражающаяся в несоответствии легкости поворота рукоятки газа (7) и резкости следующей за этим реакции мотоцикла.
Быстрое ускорение мотоцикла с предложенной системой контроля тяги возможно только в случае, если водитель, открутив рукоятку газа (7), своевременно приложит к ней дополнительный управляющий момент, соответствующий желаемому уровню ускорения. Данный вариант развития событий изображен на Фиг. 5.
Кроме того, при переключениях передач при ошибках водителя возможны неточности в синхронизации работы рукояткой газа (7) и рычагом сцепления, приводящие к возникновению «всплесков» крутящего момента, способных при определенных условиях стать причиной падения мотоциклиста. Поскольку в предложенной конструкции реализован принцип пропорциональности величины ускорения мотоцикла и усилия, приложенного к рукоятке газа (7), такие случайные «всплески» крутящего момента демпфируются в рамках отрицательной обратной связи, не оказывая существенного влияния на поведение мотоцикла.
Кроме того, следует отметить, что предложенная система контроля тяги существенно повышает удобство и безопасность вождения мощных мотоциклов, двигатели (5) которых характеризуются наличием «подхвата» на высоких оборотах, поскольку «подхват» двигателя (5) приводит не к рывку мотоцикла вперед, а к плавному повороту рукоятки газа (7) в сторону закрытия при сохранении изначально заданного темпа разгона, что опять-таки оставляет за водителем выбор: либо «согласится» с автоматикой и не увеличивать темп разгона, либо, создав дополнительный управляющий момент на рукоятке газа (7), воспользоваться возникшим в данном диапазоне оборотов двигателя (5) резервом мощности.
Кроме того, высокая эффективность контроля мощности, обеспечиваемая отрицательной обратной связью, позволяет также несколько уменьшить жесткость возвратной пружины (13), что приводит к экономии мускульной силы водителя при движении с постоянной скоростью и очень удобно в длительных поездках.
При движении по поверхности с недостаточным коэффициентом сцепления, поведение мотоцикла с предложенной системой контроля тяги имеет следующие особенности: при исчерпании запаса сцепных свойств ведущего колеса (4), в пятне контакта ведущего колеса (4) с дорогой происходит переход от трения покоя к трению скольжения, который всегда сопровождается всплеском углового ускорения ведущего колеса (4).
При начальном всплеске углового ускорения, электронный блок управления (14) практически мгновенно подает на соленоид (11) напряжение, в результате чего сердечник (12) смещается назад и частично закрывается дроссельная заслонка (6), что приводит к снижению крутящего момента двигателя (5), достаточному для восстановления сцепления ведущего колеса (4) с дорожным покрытием, при этом срабатывание автоматики ощущается водителем как характерный толчок на рукоятке газа (7) в направлении закрытия дроссельной заслонки (6), свидетельствующий о пробуксовке ведущего колеса (4).
Далее события развиваются следующим образом:
Если водитель адекватно реагирует на срабатывание обратной связи, то он немедленно уменьшает управляющий момент, приложенный к рукоятке газа (7), сцепление ведущего колеса (4) с дорожным покрытием полностью восстанавливается и мотоцикл продолжает устойчивое движение. Данный вариант развития событий изображен на Фиг. 6.
Если водитель не принимает первичное срабатывание обратной связи во внимание и продолжает прикладывать избыточный управляющий момент к рукоятке газа (7), то возможен повторный срыв ведущего колеса (4) в пробуксовку и периодическое срабатывание обратной связи по уже описанному алгоритму до тех пор, пока водитель либо уменьшит воздействие на рукоятку газа (7) до величины, обеспечивающей восстановление сцепления, либо пересилит актуатор обратной связи с целью продолжительной пробуксовки ведущего колеса (4).
Именно в этой двойственности возможных последствий срабатывания обратной связи и заключается одно из преимуществ предложенного технического решения, заключающееся в полном сохранении контроля водителя над уровнем мощности двигателя (5) независимо от срабатывания «страхующей» автоматики, что особенно при использовании мотоцикла для спортивных целей.
Работа варианта системы контроля тяги, включающего в себя признаки П. 3, 6, 8 и 9 Формулы, изображенного на Фиг. 10 Чертежей имеет следующие особенности:
1. Исполнение ротора (18) моментного двигателя (17) как части рукоятки газа (7) улучшает быстродействие обратной связи, поскольку между органом управления тягой и актуатором обратной связи отсутствуют какие-либо промежуточные элементы.
2. Наличие датчика положения (20) исключающего необходимость использования тросового привода дроссельной заслонки (6) и обеспечивающего возможность более точной настройки обратной связи за счет введения в электронный блок управления (14) функциональной зависимости величины реактивного момента от положения органа управления тягой.
3. Наличие в составе системы контроля тяги регулятора-выключателя (19) позволяющего водителю настраивать градиент реактивного момента на рукоятке газа (7) в зависимости от своих навыков, антропометрических особенностей и состояния дорожного покрытия либо полностью отключать систему контроля тяги, если ее вмешательство нецелесообразно. Изменение функциональной зависимости реактивного момента от углового ускорения ведущего колеса при различных положениях регулятора-выключателя (19) изображено на Фиг. 7.
Работа предложенного узла акселератора, выполненного по П. 4, 7-11 Формулы, имеет следующие особенности.
В первую очередь следует отметить, варианты исполнения актуатора обратной связи на основе соленоида (11) и моментного двигателя (17) могут оказаться непригодными для использования на автомобиле из-за недостаточной мощности. Поэтому, несмотря на высокое быстродействие данных вариантов исполнения актуатора обратной связи, для автомобилей целесообразнее использовать вариант актуатора обратной связи на основе мотор-редуктора (22), так как мощность актуатора в этом случае важнее, чем его быстродействие.
Рассмотрим работу данного варианта устройства на нескольких примерах:
При обычной езде с плавными ускорениями автомобиль с предложенной системой контроля тяги не имеет существенных особенностей поведения, поскольку при движении, не приводящем к возникновению углового ускорения ведущих колес (4) например, при поддержании постоянной скорости на спусках и подъемах, реактивный момент на педали акселератора (21) равен загружающему усилию, создаваемому возвратной пружиной (13).
При типичном для неопытного водителя непреднамеренном активном нажатии на педаль акселератора (21), например, в случае соскальзывания ноги с педали тормоза или попытке остановить покатившийся под уклон автомобиль при помощи «не той» педали, автомобиль начинает активно ускоряться, при этом продольное ускорение автомобиля фиксируется сначала акселерометром (16), а затем и датчиками угловой скорости (15) по описанному выше последовательному алгоритму, далее электронный блок управления (14) включает в работу мотор-редуктор (22), который через зубчатый ремень (24) передает на педаль акселератора (21) реактивный момент, величина которого, по меньшей мере, в два-три раза больше, чем загружающее усилие возвратной пружины (13), преодолеваемого водителем при случайном нажатии на педаль акселератора (23). Далее, если за время срабатывания обратной связи не произошло кратного увеличения управляющего момента, педаль акселератора (21) почти мгновенно «выталкивается» в положение, близкое к исходному, что резко уменьшает мощность двигателя (5) и снижает вероятность выхода автомобиля из-под контроля неопытного водителя.
При неаккуратном трогании на скользком покрытии на автомобиле с нормальной энерговооруженностью или при трогании на любом типе покрытия на более мощном автомобиле, автомобиль, оснащенный предложенной системой контроля тяги, «выталкивает» педаль акселератора в момент начала пробуксовки ведущих колес (4), при этом при исполнении электронного блока управления (14) по П. 10 Формулы, быстродействие и эффективность обратной связи повышается за счет реагирования по наибольшему вычисленному значению углового ускорения.
Далее, если водитель по каким-то причинам не реагирует на «выталкивание» педали акселератора (21) уменьшением управляющего момента, возможна периодическая пробуксовка ведущих колес (4) из-за циклического срабатывания обратной связи по описанному выше алгоритму до тех пор, пока водитель либо не уменьшит силу нажатия на педаль акселератора (21) до величины, обеспечивающей устойчивый баланс тягово-сцепных свойств автомобиля, либо пересилит обратную связь с целью обеспечения продолжительного скольжения ведущих колес (4).
Кроме того, при использовании на автомобиле механической коробки перемены передач, наличие обратной связи узла акселератора несколько упрощает процесс переключения передач при разгоне автомобиля, поскольку после прохождения пика крутящего момента двигателя (5) педаль акселератора (21) из-за падения реактивного момента начинает активно «проваливаться», предупреждая водителя о наиболее выгодном моменте переключения на повышенную передачу.
Кроме того, установка предложенной системы контроля тяги упрощается за счет возможности использования для работы системы контроля тяги датчиков угловой скорости (15), входящих в состав тормозной системы автомобиля или мотоцикла. Дополнительно данная возможность обеспечивается при использовании акселерометра (16), применение которого для регистрации первичного ускорения существенно снижает требования к быстродействию штатных датчиков угловой скорости (15).
Кроме того, при всех описанных выше вариантах реализации изобретения, экономия мускульных усилий водителя достигается за счет возможности эффективного контроля мощности двигателя (5) при относительно легкой и короткоходной педали акселератора (21) или рукоятки газа (7).
Таким образом, благодаря введению в известную конструкцию системы контроля тяги новых конструктивных признаков, упрощается управление разгонной динамикой энерговооруженных колесных транспортных средств и повышается безопасность их эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ АКСЕЛЕРАТОРА ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ С ТУРБОНАДДУВОМ | 2018 |
|
RU2681805C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2624760C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2630567C1 |
| КРЫЛО С АЭРОДИНАМИЧЕСКОЙ ШТОРОЙ | 2016 |
|
RU2646686C2 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646691C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СКОЛЬЖЕНИЯ | 2020 |
|
RU2759370C1 |
| СИСТЕМА УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ ПОДРЕССОРЕННОЙ МАССЫ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2493987C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| ОПРЕДЕЛЕНИЕ СТАРТА АВТОМОБИЛЯ | 2011 |
|
RU2581609C2 |
| СИДЕНЬЕ ПИЛОТА | 2016 |
|
RU2610325C1 |






Система контроля тяги содержит электронный блок управления (14), датчик угловой скорости (15). Электронный блок управления конструктивно связан с двигателем (5) и с датчиком угловой скорости (15). Электронный блок управления (14) выполнен с возможностью вычисления величины углового ускорения ведущего колеса и уменьшения мощности двигателя (5) при повышении величины углового ускорения ведущего колеса. Система содержит актуатор обратной связи (11), конструктивно связанный с электронным блоком управления (14), кинематически связанный с органом управления тягой (7) и установленный с возможностью создания на органе управления тягой (7) реактивного момента, величина которого увеличивается с ростом величины углового ускорения ведущего колеса и соответствует заложенной в электронный блок управления (14) функциональной зависимости реактивного момента от величины углового ускорения ведущего колеса. Достигается эффективный контроль мощности двигателя, упрощается управление разгонной динамикой транспортного средства и повышается безопасность его эксплуатации. 12 з.п. ф-лы, 13 ил.
1. Система контроля тяги, содержащая электронный блок управления, по меньшей мере, один датчик угловой скорости и установленная на колесном транспортном средстве, включающем в себя как минимум два колеса, при этом, по меньшей мере, одно из колес является ведущим, тормозную систему, а также двигатель и орган управлении тягой, при этом орган управления тягой установлен с возможностью колебательного или вращательного движения и конструктивно связан с двигателем с возможностью плавного регулирования мощности двигателя, датчик угловой скорости установлен на ведущем колесе, а электронный блок управления конструктивно связан с двигателем и с, по меньшей мере, одним датчиком угловой скорости, выполнен с возможностью вычисления величины углового ускорения, по меньшей мере, одного ведущего колеса и уменьшения мощности двигателя при повышении величины углового ускорения, по меньшей мере, одного ведущего колеса, отличающаяся тем, что дополнительно содержит актуатор обратной связи, конструктивно связанный с электронным блоком управления, кинематически связанный с органом управления тягой и установленный с возможностью создания на органе управления тягой реактивного момента, величина которого увеличивается с ростом величины углового ускорения, по меньшей мере, одного ведущего колеса и соответствует заложенной в электронный блок управления функциональной зависимости реактивного момента от величины углового ускорения, по меньшей мере, одного ведущего колеса.
2. Система контроля тяги по п. 1, отличающаяся тем, что актуатор обратной связи выполнен в виде соленоида, обмотка которого конструктивно связана с электронным блоком управления, а выходное звено актуатора выполнено в виде сердечника соленоида.
3. Система контроля тяги по п. 1, отличающаяся тем, что актуатор обратной связи выполнен в виде моментного электродвигателя, конструктивно связанного с электронным блоком управления, при этом выходное звено актуатора выполнено в виде ротора моментного электродвигателя.
4. Система контроля тяги по п. 1, отличающаяся тем, что актуатор обратной связи выполнен в виде мотор-редуктора с моментным электродвигателем, конструктивно связанным с электронным блоком управления, при этом выходное звено актуатора выполнено в виде выходного вала мотор-редуктора.
5. Система контроля тяги по п. 2, отличающаяся тем, что кинематическая связь выходного звена актуатора обратной связи с органом управления реализована при помощи шкивов и тросов в оболочке.
6. Система контроля тяги по п. 3 или 4, отличающаяся тем, что кинематическая связь выходного звена актуатора обратной связи с органом управления реализована за счет исполнения органа управления и выходного звена в виде единого конструктивного элемента.
7. Система контроля тяги по п. 3 или 4, отличающаяся тем, что кинематическая связь выходного звена актуатора обратной связи с органом управления выполнена в виде ременной передачи с зубчатым ремнем.
8. Система контроля тяги по п. 1, отличающаяся тем, что орган управления снабжен возвратной пружиной, установленной с возможностью автоматического возврата органа управления тягой и выходного звена актуатора обратной связи в положение, соответствующее минимальной мощности двигателя.
9. Система контроля тяги по п. 1, отличающаяся тем, что дополнительно содержит регулятор-выключатель, конструктивно связанный с электронным блоком управления с возможностью полного отключения актуатора обратной связи либо ступенчатого или плавного регулирования величины реактивного момента на органе управления тягой.
10. Система контроля тяги по п. 1, отличающаяся тем, что при различии в показаниях датчиков угловой скорости конструктивное исполнение электронного блока управления обеспечивает изменение реактивного момента на органе управления тягой в соответствии с наибольшим вычисленным значением углового ускорения.
11. Система контроля тяги по п. 1, отличающаяся тем, что дополнительно содержит акселерометр, конструктивно связанный с электронным блоком управления и установленный на транспортном средстве с возможностью косвенного определения величины углового ускорения, по меньшей мере, одного ведущего колеса через величину продольного ускорения транспортного средства, при этом конструктивное исполнение электронного блока управления обеспечивает изменение реактивного момента на органе управления тягой на основании показаний акселерометра до достижения, по меньшей мере, одним ведущим колесом пороговой скорости вращения, а после достижения пороговой скорости вращения - на основании показаний, по меньшей мере, одного датчика угловой скорости либо сравнения показаний акселерометра и, по меньшей мере, одного датчика угловой скорости.
12. Система контроля тяги по п. 1, отличающаяся тем, что дополнительно содержит датчик положения, кинематически связанный с органом управления тягой и конструктивно связанный с электронным блоком управления с возможностью изменения величины реактивного момента в зависимости от положения органа управления тягой.
13. Система контроля тяги по п. 1, отличающаяся тем, что тормозная система включает в себя установленные на колесах, по меньшей мере, два датчика угловой скорости, при этом, по меньшей мере, один из датчиков угловой скорости тормозной системы конструктивно связан с электронным блоком управления.
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| US 2013091977 A1, 18.04.2013. | |||

