Настоящее изобретение касается авиационной техники, а именно систем управления тягой силовой установки самолетов, автожиров и вертолетов, преимущественно легкого и сверхлегкого классов. Изобретение относится к рубрике B64C 13/04 МКИ.
Известны технические решения, аналогичные предлагаемому, как, например, рычаг управления двигателем (РУД), содержащий основание, рукоятку и фрикционную муфту. Являющийся составной частью классической системы управления самолетом, РУД в его современном виде впервые был применен в самом начале развития авиационной техники. Главным достоинством классического РУДа является возможность дискретного регулирования мощности силовой установки за счет торможения рукоятки в выбранном положении при помощи фрикциона, а недостатком - невозможность изменить положения РУДа, не отрывая рук от штурвала. Так, например, при выполнении посадки в сложных метеоусловиях пилот должен одновременно корректировать тягу двигателя синхронно с парированием кренов и контролем угла тангажа, что при периодическом снятии одной из рук со штурвала неизбежно приводит к снижению точности и согласованности его действий, что в конечном итоге снижает безопасность полетов.
Известны также подрулевые лепестки управления коробкой передач, впервые примененные на гоночных автомобилях марки Ferrari в 80 годах прошлого века. Эти лепестки позволили пилоту гоночного болида сохранять максимальный контроль над траекторией движения автомобиля в процессе переключения передач, а также ускоряли сам процесс переключения. Результаты внедрения подрулевых лепестков и других улучшений в конструкции автомобилей в плане повышения удобства управления и пассивной безопасности, сделанные в начале 80 годов, оказались столь велики, что по сути положили конец «эпохе похорон» в гонках Формулы 1, которая продолжалась с конца 50 годов XX века.
Сегодня подрулевые лепестки или клавиши входят в стандартное оснащение большинства легковых автомобилей, имеющих автоматическую либо автоматизированную механическую трансмиссию.
Например, подобные подрулевые лепестки описаны в заявке на патент США №2014/0116179 от 01.05.2014, названной «система и устройство для отключения автомобильных подрулевых переключателей».
Известны также системы управления самолетов, в которых РУДы интегрированы в систему автоматического управления тягой двигателей (автомат тяги) летательного аппарата. Характерным примером подобных устройств можно считать «Механизм автоматического контроля тяги», описание которого приводится в патенте США №3,363,480 от 16.01.1968, который по своему техническому решению наиболее близок к предложенному изобретению. Данный механизм содержит, по меньшей мере, один орган управления тягой с электроприводом, при этом орган управления тягой конструктивно связан с силовой установкой летательного аппарата, а электропривод установлен с возможностью перемещения органа управления тягой.
Кроме того, данный механизм содержит основание, фрикционную муфту, планетарную зубчатую передачу, а также механизм регулировки загружающего усилия, электропривод связан с рычагом управления двигателем посредством фрикционной муфты, орган управления тягой выполнен в виде рычага управления двигателем с эпициклической шестерней, солнечная шестерня кинематически связана с валом электропривода, а водило, на котором установлены сателлиты, выполнено в виде тормозного барабана фрикционной муфты. Планетарная зубчатая передача в данной конструкции нужна для того, чтобы сделать неподвижной относительно основания устройства одну из частей фрикциона, что упрощает реализацию механизма регулировки загружающего усилия.
Недостатком данного механизма является необходимость отрывать одну из рук от штурвала для управления тягой при отключенном автомате тяги, то есть преимущество в удобстве управления самолетом зависит от наличия работающей автоматики тяги, что делает такое устройство малоприменимым в легкой и сверхлегкой авиации, где автоматика тяги чаще всего не используется.
С другой стороны, поскольку для легкой и сверхлегкой авиации, критически важна быстрота доступа пилота к функции управления тягой, так как из-за малой инерции для этих аппаратов характерен высокий темп потери скорости при маневрировании. Времени, которое требуется для переноса руки со штурвала на РУД и его сдвига вперед, у пилота сверхлегкого воздушного судна может просто не быть в запасе, тем более, что добавление тяги, особенно паническое и избыточное, происходящее уже после входа самолета в режим сваливания крайне опасно потерей управления по крену и мгновенным срывом в штопор из-за непарируемого реактивного момента воздушного винта.
Еще одним неочевидным недостатком стандартной системы управления тягой применительно к одномоторным винтовым самолетам является ее мнемоническая нейтральность относительно создаваемых при изменении тяги паразитных моментах воздушного винта по рысканию и крену. Так, например, движение руки, управляющей РУДом, вперед при левом вращении воздушного винта помимо продольного ускорения, приводит также к правому крену и скольжению на левое крыло, при этом направление перемещения органа управления соответствует только направлению вектора ускорения летательного аппарата, и никак не соответствует сопутствующим этому угловым ускорениям, что в известной степени усложняет пилотирование, особенно при высокой тяговооруженности самолета.
Таким образом, при разработке предложенной системы управления летательного аппарата была поставлена задача повышения удобства, оперативности и логичности управления тягой силовой установки за счет объединения известного устройства управления тягой и известного органа управления, примененного по новому назначению при сохранении возможности традиционного управления тягой по выбору пользователя.
Цель изобретения - упрощение и облегчение процесса пилотирования летательного аппарата за счет упрощения процесса регулирования тяги, повышение безопасности полетов, повышение потребительских качеств летательного аппарата как рыночного продукта.
Для достижения поставленных целей в известную конструкцию системы управления летательного аппарата, содержащую штурвал, штурвальную колонку и, по меньшей мере, один орган управления тягой с электроприводом, при этом орган управления тягой конструктивно связан с силовой установкой летательного аппарата, а электропривод установлен с возможностью перемещения органа управления тягой, были введены следующие отличительные признаки: электропривод органа управления тягой включает в себя средства коммутации с двумя лепестками, установленными слева и справа от плоскости симметрии штурвала с возможностью управления положением органа управления тягой.
Кроме того, средства коммутации выполнены в виде трехпозиционного переключателя, содержащего корпус переключателя, контактную группу, возвратные пружины со штоками и траверсу, лепестки установлены на траверсе, траверса шарнирно установлена в корпусе переключателя и подпружинена возвратными пружинами, контактная группа установлена на корпусе переключателя и траверсе и связана с электроприводом с возможностью реверсирования электропривода рукоятки, а корпус переключателя установлен между штурвалом и штурвальной колонкой.
Кроме того, конструктивное исполнение системы управления летательного аппарата обеспечивает сонаправленность направления вращения траверсы переключателя с направлением реактивного момента от силовой установки по рысканию, возникающим вследствие данного вращения.
Кроме того, орган управления тягой выполнен в виде рукоятки, при этом электропривод содержит основание рукоятки, фрикционную муфту и мотор-редуктор с выходным валом, рукоятка и мотор-редуктор установлены на основании рукоятки, фрикционная муфта установлена на рукоятке и включает в себя ведущие и ведомые диски, втулки, крышку и плоскую пружину, при этом ведомые диски выполнены с вырезами, крышка установлена на рукоятке при помощи втулок, а при этом вырезы ведомых дисков входят в зацепление с втулками, ведущие диски установлены на валу мотор-редуктора между ведомыми дисками.
Кроме того, система управления летательного аппарата содержит регулятор напряжения, при этом контактная группа трехпозиционного переключателя связана с мотор-редуктором через регулятор напряжения с возможностью регулирования темпа перемещения рукоятки при включении электропривода.
Кроме того, мотор-редуктор оснащен электродвигателем с полым ротором.
Кроме того, система управления летательного аппарата содержит блок управления, средства коммутации и мотор-редуктор связаны с блоком управления, а мотор-редуктор оснащен шаговым электродвигателем.
Благодаря введенным конструктивным изменениям повышается удобство управления тягой силовой установки, упрощается обучение и уменьшается вероятность ошибок пилотирования.
Устройство согласно изобретению иллюстрируется чертежами, на которых обозначено:
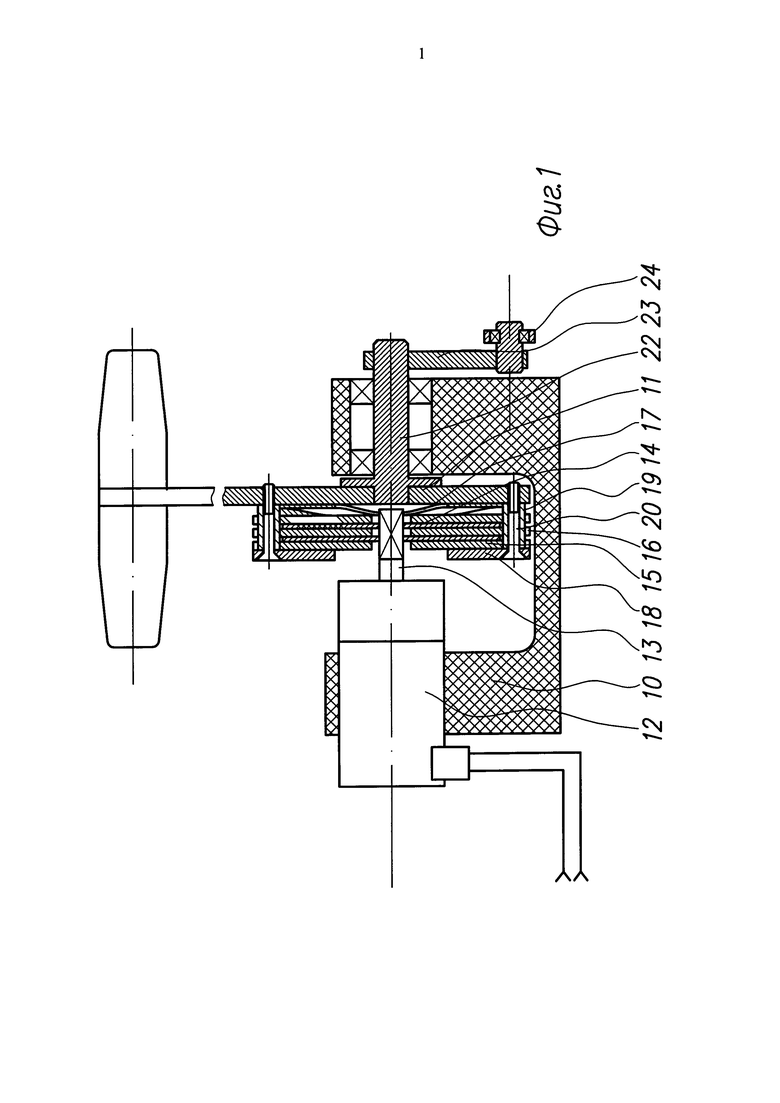
на Фиг. 1 - разрез электропривода рукоятки;
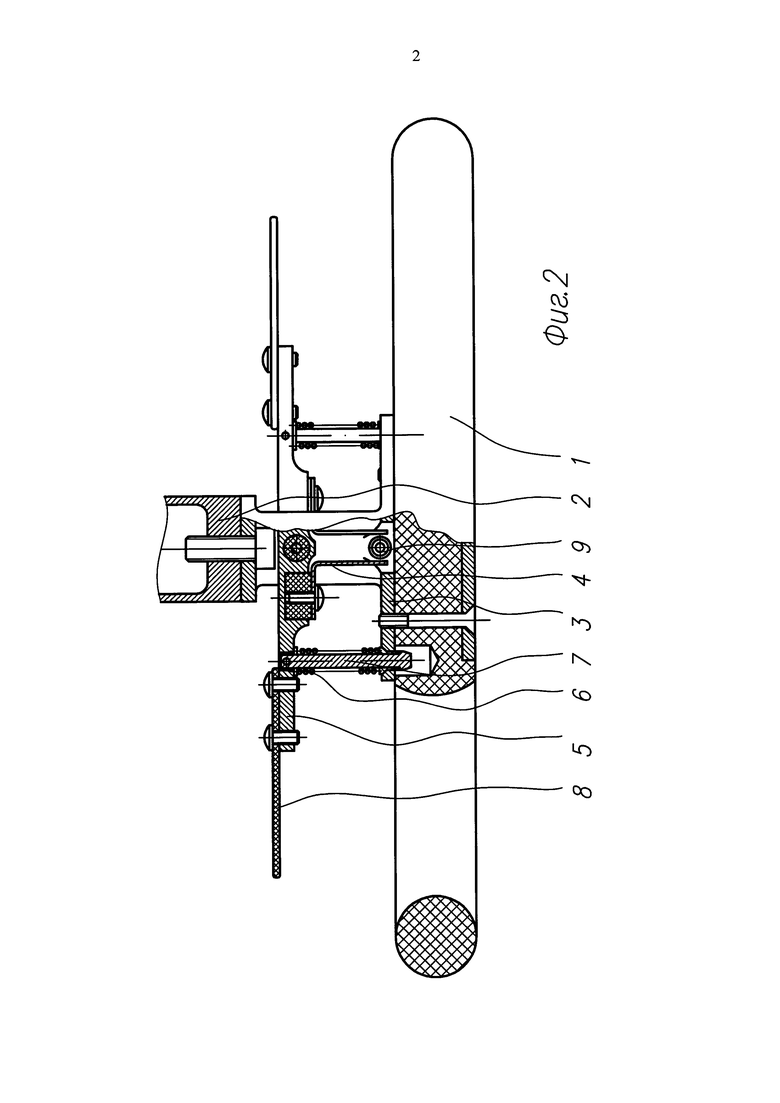
на Фиг. 2 - разрез переключателя;
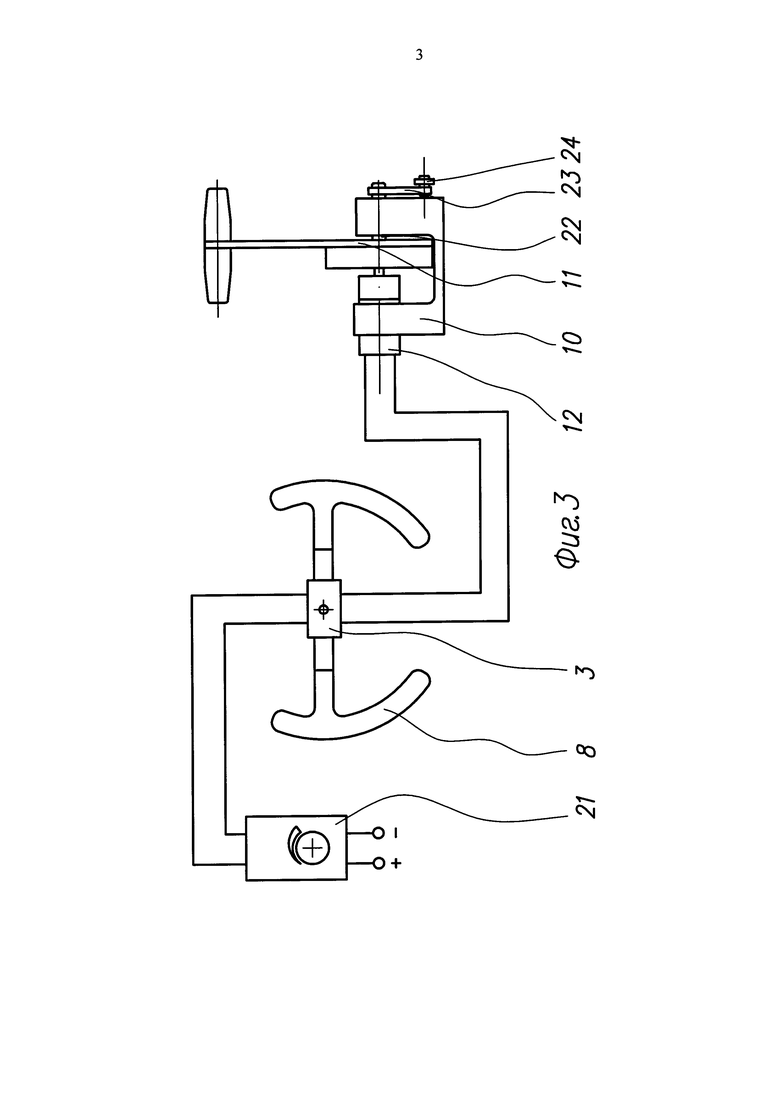
на Фиг. 3. - принципиальная схема включения регулятора напряжения;
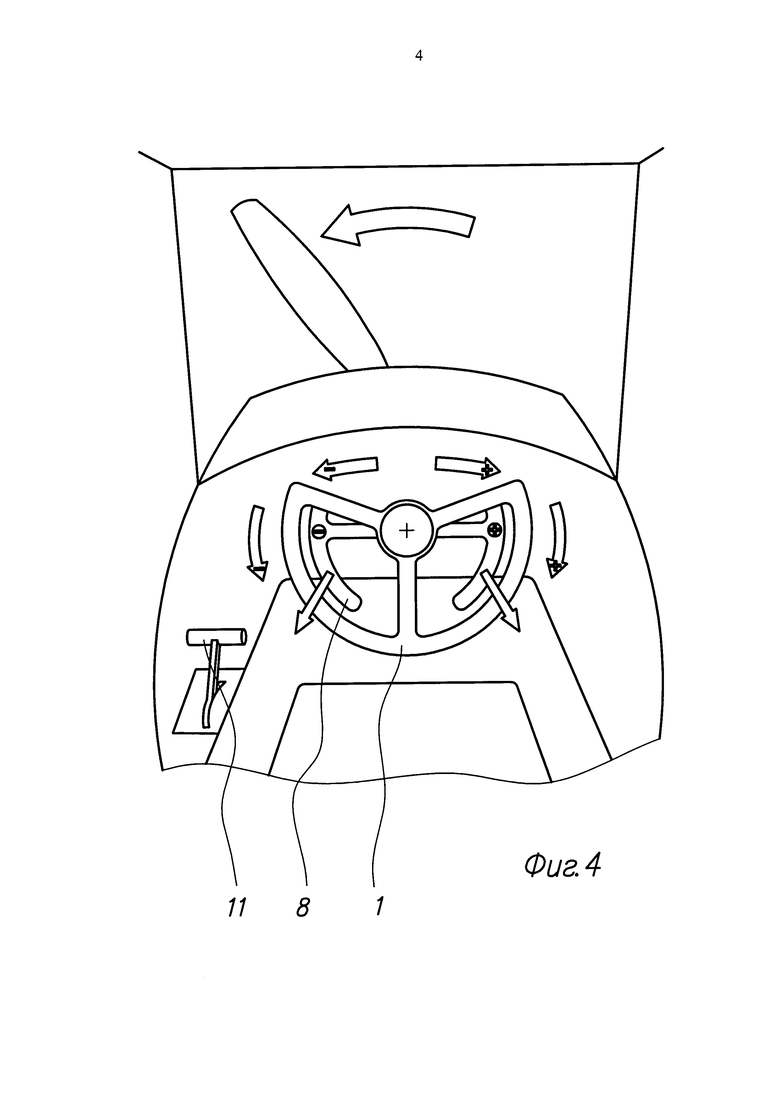
на Фиг. 4 - схема совпадения реактивных моментов силовой установки при левом вращением винта с направлением нажатия на лепестки переключателя.
Устройство согласно изобретению состоит из двух основных узлов: переключателя и рукоятки.
Узел переключателя содержит штурвал (1), штурвальную колонку (2), корпус переключателя (3), контактную группу (4), траверсу (5), возвратные пружины (6), штоки (7), лепестки (8) и контактные стойки (9), при этом корпус переключателя (3) установлен между штурвалом (1) и штурвальной колонкой (2), траверса (5) установлена на оси в корпусе переключателя (3), штоки (7), контактная группа (4) и лепестки (8) установлены на траверсе (5), возвратные пружины (6) надеты на штоки (7) и упираются в корпус переключателя (3), контактные стойки (9) установлены на корпусе переключателя (3) с возможностью взаимодействия с контактной группой (4).
Узел рукоятки содержит основание рукоятки (10), рукоятку (11), мотор-редуктор (12) с валом (13), при этом рукоятка (11) и мотор-редуктор (12) установлены на основании рукоятки (10) таким образом, чтобы вал (13) и рукоятка (11) находились бы на одной оси.
Фрикционная муфта является составной частью узла рукоятки, смонтирована на рукоятке (11) и содержит ведущие диски (14), ведомые диски (15) с вырезами (16), плоскую пружину (17), крышку (18) втулки (19) и крепежные винты (20), при этом крышка (18) установлена на рукоятке (11) при помощи втулок (19) и крепежных винтов (20), вырезы (16) ведомых дисков входят в зацепление с втулками (19), ведущие диски (14) установлены на валу (13) мотор-редуктора (12) между ведомыми дисками (15), при этом пакет ведущих дисков (14) и ведомых дисков (15) обжимается при помощи плоской пружины (17).
Возможно также оснащение устройства регулятором напряжения (21), подключенным между источником тока и переключателем.
Кроме того, рукоятка (11) установлена на основании рукоятки (10) при помощи оси (22) и соединена с силовой установкой при помощи рычага (23) и тяги (24).
Возможно также оснащение мотор-редуктора (12) электродвигателем с полым ротором либо шаговым электродвигателем в сочетании с блоком управления.
Устройство согласно изобретению работает следующим образом: при включении энергосистемы борта подается напряжение, в том числе на контактную группу (4). Это дает пилоту возможность альтернативного управления тягой силовой установки: при обычном управлении рукоятка (11) непосредственно передвигается рукой и фиксируется в выбранном положении за счет сил трения между ведомыми дисками (15) и ведущими дисками (14) фрикционной муфты, поджатыми при помощи плоской пружины (17), а при альтернативном управлении при нажатии на левый лепесток (8) траверса (5) поворачивается, сжимая левую возвратную пружину (6) и замыкая контактную группу (4) на контактные стойки (9), что приводит к подаче напряжения на мотор-редуктор (12) и вращению рукоятки (11) на оси (22), при этом управляющее усилие передается на силовую установку через рычаг (23) и тягу (24) и приводит к уменьшению тяги силовой установки.
При нажатии на правый лепесток (8) работа устройства происходит аналогичным образом, за исключением того, что направление вращения вала (13) мотор-редуктора меняется на противоположное и рукоятка (11) вращается в противоположном направлении, что соответствует увеличению тяги силовой установки.
Дополнительным преимуществом указанное назначение лепестков (8) обладает при использовании данного устройства на одномоторном пропеллерном самолете с винтом левого вращения, так как в полете на затриммированом самолете на режиме номинальной мощности отклонения самолета от прямолинейного полета при изменении тяги силовой установки будут совпадать с направлением нажима на лепестки (8), а поведение машины при изменении тяги в этом случае будет восприниматься пилотом как идеально предсказуемое и логичное.
Кроме того, при использовании лепестков (8) для управления тягой силовой установки у некоторых пилотов может происходить положительный перенос навыка управления автомобилем с автоматической АКПП с лепестковым управлением, что еще более ускоряет и упрощает процесс адаптации человека к управлению летательным аппаратом.
При длительном нажатии на лепесток (8) сервопривод продолжает свою работу, при этом рукоятка (11) остается в одном из крайних положений, а фрикционная муфта пробуксовывает, позволяя избежать перегрузки мотор-редуктора (11) по потребляемому току.
Для улучшения эксплуатационных характеристик устройства возможно оснащение устройства регулятором напряжения (21), позволяющим пилоту задавать желаемый темп перемещения рукоятки (11) при нажатии на лепестки (8). При этом пределы регулировки темпа перемещения рукоятки задаются конструктивно исходя из соображений надежности работы устройства.
Возможно также оснащение мотор-редуктора (12) электродвигателем с полым ротором, минимальный момент инерции которого уменьшает выбег мотор-редуктора (12) после отпускания лепестка (8), что повышает точность вводимой коррекции.
С той же целью возможно использование мотор-редуктора (12) с шаговым двигателем, оснащенным блоком управления. Варианты настройки блока управления позволяют помимо режима непрерывного перемещения рукоятки (11) при нажиме на лепесток (8) использовать также режим дискретного изменения тяги за одно нажатие, независимо от его продолжительности. Для многих пользователей эта функция может оказаться удобнее непрерывного перемещения рукоятки (11).
В любом случае независимо от особенностей реализации мотор-редуктора (12) пилот всегда может управлять тягой непосредственно при помощи рукоятки (11), не разрушая привычный стереотип своих действий.
Наиболее полезным предложенное техническое решение может оказаться при полетах в сложных метеоусловиях, на малых высотах, вблизи препятствий, в горах, а также выполнении технически сложных посадок, например при сильном боковом ветре. В первую очередь предложенное техническое решение позволяет сделать то же, что когда-то сделали «лепестки» в автоспорте - обеспечить стабильность управляющих моментов, прикладываемых пилотом к штурвалу (1) для парирования отклонения самолета от траектории. Вторым не менее важным моментом становится большая легкость поддержания пилотом оптимальной приборной скорости во всех фазах полета, в том числе при выполнении сложных и вынужденных маневров.
Не менее важно то, что благодаря конструктивной простоте, высокой надежности и технологичности предложенное техническое решение может применяться на летательных аппаратах всех весовых и ценовых категорий, включая сверхлегкие, которые из-за малой инерции наиболее критичны к оперативности управлении тягой силовой установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646691C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СКОЛЬЖЕНИЯ | 2020 |
|
RU2759370C1 |
| СИДЕНЬЕ ПИЛОТА | 2016 |
|
RU2610325C1 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2653417C1 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2645522C1 |
| КРЫЛО С АЭРОДИНАМИЧЕСКОЙ ШТОРОЙ | 2016 |
|
RU2646686C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2624760C1 |
| ЭЛЕКТРОННЫЙ АВИАГОРИЗОНТ | 2017 |
|
RU2664789C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СВАЛИВАНИЯ | 2017 |
|
RU2653414C1 |
Изобретение относится к области авиации, в частности к конструкциям устройств управления тягой силовых установок на воздушных судах. Система управления летательного аппарата содержит штурвал, штурвальную колонку и, по меньшей мере, один орган управления тягой с электроприводом. Орган управления тягой конструктивно связан с силовой установкой летательного аппарата, а электропривод установлен с возможностью перемещения органа управления тягой. Орган управления тягой включает в себя средства коммутации с двумя лепестками, установленными слева и справа от плоскости симметрии штурвала с возможностью управления положением органа управления тягой. Средства коммутации выполнены в виде трехпозиционного переключателя, содержащего корпус переключателя, контактную группу, возвратные пружины со штоками и траверсу. Лепестки установлены на траверсе, траверса шарнирно установлена в корпусе переключателя и подпружинена возвратными пружинами. Контактная группа установлена на корпусе переключателя и траверсе и связана с электроприводом с возможностью реверсирования электропривода рукоятки, а корпус переключателя установлен между штурвалом и штурвальной колонкой. Повышается удобство управления тягой силовой установки, упрощается обучение и уменьшается вероятность ошибок пилотирования. 6 з.п. ф-лы, 4 ил.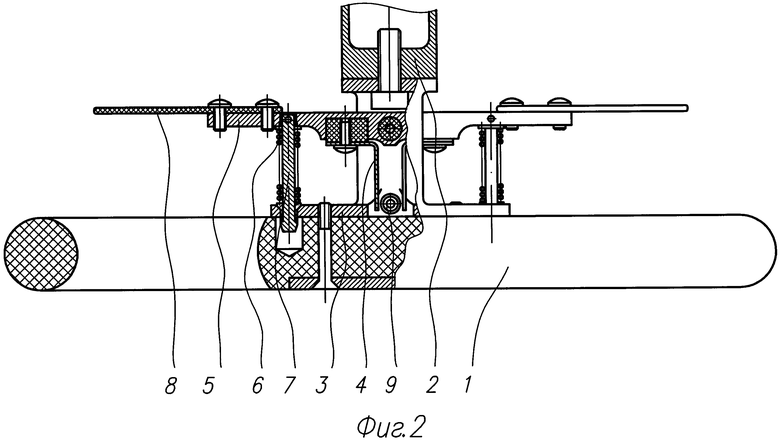
1. Система управления летательного аппарата, содержащая штурвал, штурвальную колонку и, по меньшей мере, один орган управления тягой с электроприводом, при этом орган управления тягой конструктивно связан с силовой установкой летательного аппарата, а электропривод установлен с возможностью перемещения органа управления тягой, отличающаяся тем, что электропривод органа управления тягой включает в себя средства коммутации с двумя лепестками, установленными слева и справа от плоскости симметрии штурвала с возможностью управления положением органа управления тягой.
2. Система управления летательного аппарата по п. 1, отличающаяся тем, что средства коммутации выполнены в виде трехпозиционного переключателя, содержащего корпус переключателя, контактную группу, возвратные пружины со штоками и траверсу, лепестки установлены на траверсе, траверса шарнирно установлена в корпусе переключателя и подпружинена возвратными пружинами, контактная группа установлена на корпусе переключателя и траверсе и связана с электроприводом с возможностью реверсирования электропривода рукоятки, а корпус переключателя установлен между штурвалом и штурвальной колонкой.
3. Система управления летательного аппарата по п. 1, отличающаяся тем, что конструктивное исполнение системы управления летательного аппарата обеспечивает сонаправленность направления вращения траверсы переключателя с направлением реактивного момента от силовой установки по рысканию, возникающим вследствие данного вращения.
4. Система управления летательного аппарата по п. 1, отличающаяся тем, что орган управления тягой выполнен в виде рукоятки, при этом электропривод содержит основание рукоятки, фрикционную муфту и мотор-редуктор с выходным валом, рукоятка и мотор-редуктор установлены на основании рукоятки, фрикционная муфта установлена на рукоятке и включает в себя ведущие и ведомые диски, втулки, крышку и плоскую пружину, при этом ведомые диски выполнены с вырезами, крышка установлена на рукоятке при помощи втулок, а при этом вырезы ведомых дисков входят в зацепление с втулками, ведущие диски установлены на валу мотор-редуктора между ведомыми дисками.
5. Система управления летательного аппарата по п. 1, отличающаяся тем, что система управления летательного аппарата содержит регулятор напряжения, при этом контактная группа трехпозиционного переключателя связана с мотор-редуктором через регулятор напряжения с возможностью регулирования темпа перемещения рукоятки при включении электропривода.
6. Система управления летательного аппарата по п. 1, отличающаяся тем, что мотор-редуктор оснащен электродвигателем с полым ротором.
7. Система управления летательного аппарата по п. 1, отличающаяся тем, что содержит блок управления, средства коммутации и мотор-редуктор связаны с блоком управления, а мотор-редуктор оснащен шаговым электродвигателем.
| МИКРОСАМОЛЕТ ДЛЯ ИНВАЛИДОВ | 1993 |
|
RU2104223C1 |
| WO 2016060720 A1, 21.04.2016 | |||
| US 2014116179 A1, 01.05.2014 | |||
| УСТРОЙСТВО ДЛЯ РУЧНОГО УПРАВЛЕНИЯ ПРИВОДОМ АКСЕЛЕРАТОРА | 2002 |
|
RU2246411C2 |
| US 3363480 A, 16.01.1968. | |||

