ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области техники медицинских приборов, в частности, к способу и устройству для определения эластичности.
УРОВЕНЬ ТЕХНИКИ
Эластичность биологических тканей тесно связана с характеристиками поражения и важна для диагностики заболевания. Таким образом, методика определения эластичности для неразрушающего определения эластичности вязкоупругой среды, например, человеческой печени, широко использована в последнее время.
Метод определения эластичности используют для количественного определения эластичности тканей, т. е. модуля упругости. Основной принцип состоит в применении внутреннего (включая собственное) или внешнего динамического / статического / квазистатического возбуждения тканей, и ткани реагируют в соответствии с законами механики упругих сред, биомеханики и других законов физики. Поскольку различные ткани (в том числе здоровые и патологические) обладают различными коэффициентам упругости (напряжение / деформация), они демонстрируют различные уровни деформации при воздействии внешних сил. Преобразование изображения осуществляется эхо-сигналами до и после деформации ткани, таким образом обеспечивается визуальное отображение цветом эластичности ткани и места расположения поражения.
В настоящее время, чтобы обеспечить максимальную точность результатов определения эластичности ткани, часто необходимо повторить измерение ткани несколько раз, чтобы получить окончательные результаты определения эластичности. Т. е. оператор помещает зонд в соответствующее положение, начинает первое измерение и управляет компьютером для соответствующей обработки, чтобы получить первый результат определения эластичности; а затем снова помещает зонд в соответствующее положение ткани и начинает второе измерение, чтобы получить второй результат определения эластичности. Вышеуказанный процесс повторяют несколько раза. Окончательный результат определения эластичности получают посредством рассмотрения множества результатов определения эластичности, полученных выше.
Проводя вышеуказанные измерения, оператор выполняет множество измерений, используя ручной зонд, ему необходимо определить положение измерения несколько раз, поэтому трудно обеспечить, чтобы определенное положение измерения каждый раз было одинаковым, что приводит к отклонению положения измерения и влияет на точность результатов измерения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Чтобы решить как минимум одну проблему, указанную в уровне техники, настоящее изобретение предлагает способ и устройство для определения эластичности для устранения недостатка обычного способа со множеством измерений, где результат определения эластичности обладает недостаточной точностью.
Настоящее изобретение предлагает способ определения эластичности, который включает:
шаг 1: поддержание устройства возбуждения и ультразвукового преобразователя в контакте с поверхностью ткани; управление устройством возбуждения для периодического возбуждения N поперечных волн в ткани в течение заранее установленного интервала времени и управление ультразвуковым преобразователем для передачи ультразвуковой волны к ткани, причем число N является целым больше 1;
шаг 2: получение ультразвуковым преобразователем ультразвукового эхо-сигнала, соответствующего каждой поперечной волне;
шаг 3: получение характеристического параметра распространения каждой поперечной волны в соответствии с ультразвуковым эхо-сигналом, соответствующим каждой поперечной волне;
шаг 4: расчет параметра эластичности ткани в соответствии с характеристическими параметрами распространения N поперечных волн и плотностью ткани.
Настоящее изобретение предлагает устройство для определения эластичности, содержащее:
управляющий компьютер, устройство возбуждения и ультразвуковой преобразователь; при этом устройство возбуждения и ультразвуковой преобразователь находятся в контакте с поверхностью ткани.
Управляющий компьютер содержит:
управляющий модуль, сконфигурированный для управления устройством возбуждения для периодического возбуждения N поперечных волн в ткани в течение заранее установленного интервала времени и управления ультразвуковым преобразователем для передачи ультразвуковой волны к ткани, где N является целым больше 1;
приемный модуль, сконфигурированный для получения ультразвуковым преобразователем ультразвукового эхо-сигнала, соответствующего каждой поперечной волне;
получающий модуль, сконфигурированный для получения характеристического параметра распространения каждой поперечной волны в соответствии с ультразвуковым эхо-сигналом, соответствующим каждой поперечной волне;
расчетный модуль, сконфигурированный для расчета параметра эластичности ткани в соответствии с характеристическими параметрами распространения N поперечных волн и плотностью ткани.
Настоящее изобретение предлагает способ и устройство для определения эластичности. Когда требуется определение эластичности ткани, устройство возбуждения и ультразвуковой преобразователь приводят в контакт с поверхностью ткани, и управляющий компьютер управляет устройством возбуждения для постоянного и периодического возбуждения N поперечных волн в ткани в течение заранее установленного интервала времени без локализации устройства возбуждения вручную несколько раз на поверхности ткани, обеспечивая таким образом возбуждение N поперечных волн относительно одного и того же положения, что способствует обеспечению точности окончательного результата определения параметра эластичности. После передачи ультразвуковой волны, соответствующей каждой поперечной волне, и приема ультразвукового эхо-сигнала, соответствующего каждой поперечной волне, ультразвуковым преобразователем получают характеристический параметр распространения каждой поперечной волны в соответствии с ультразвуковым эхо-сигналом, соответствующим каждой поперечной волне. Наконец, параметр эластичности ткани рассчитывают в соответствии с характеристическим параметром распространения N поперечных волн и плотностью ткани. Так как устройство возбуждения и ультразвуковой преобразователь удерживаются в контакте с поверхностью ткани, получение ультразвукового эхо-сигнала является постоянным, и, таким образом, может быть увеличена эффективность определения эластичности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
ФИГ. 1 представляет собой блок-схему первого примера осуществления способа определения эластичности согласно данному изобретению;
ФИГ. 2 представляет собой блок-схему одной конкретной реализации шага 104 примера осуществления, показанного на ФИГ. 1;
ФИГ. 3 представляет собой блок-схему другой конкретной реализации шага 104 показанного на ФИГ. 1 примера осуществления изобретения;
ФИГ. 4 представляет собой блок-схему второго примера осуществления способа определения эластичности согласно данному изобретению; и
ФИГ. 5 представляет собой схему первого примера осуществления устройства для определения эластичности согласно данному изобретению.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
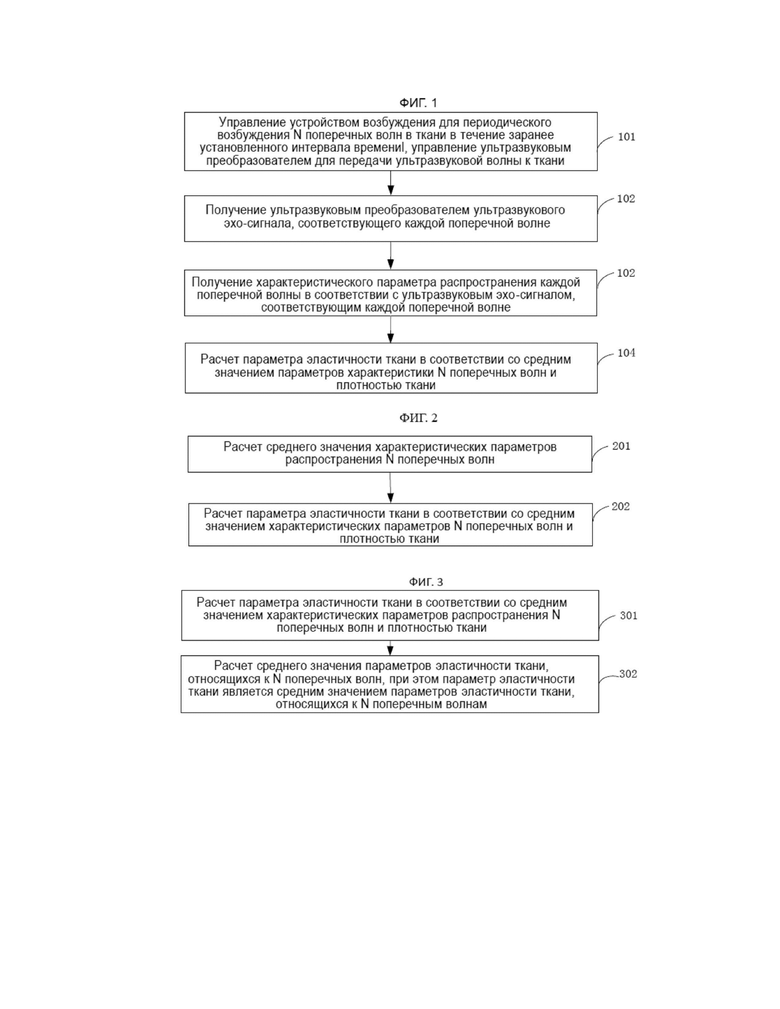
ФИГ. 1 представляет собой блок-схему первого примера осуществления способа определения эластичности согласно данному изобретению. В данном примере осуществления способ определения эластичности осуществляется устройством для определения эластичности, и устройство для определения эластичности содержит управляющий компьютер, устройство возбуждения, ультразвуковой преобразователь и т. д., при этом устройство возбуждения и ультразвуковой преобразователь могут быть интегрированы в зонде определения эластичности так, что способ определения эластичности может быть реализован посредством управляющего компьютера в устройстве для определения эластичности, как показано на ФИГ. 1, причем способ определения эластичности включает:
шаг 101: управление устройством возбуждения для периодического возбуждения N поперечных волн в ткани в течение заранее установленного интервала времени и управление ультразвуковым преобразователем для передачи ультразвуковой волны к ткани.
При этом устройство возбуждения и ультразвуковой преобразователь поддерживаются в контакте с поверхностью ткани, и N является целым числом больше 1.
В данном примере осуществления изобретения, когда требуется определить эластичность ткани, устройство возбуждения и ультразвуковой преобразователь помещают на поверхность ткани и поддерживают их контакт с поверхностью ткани.
Кроме того, управляющий компьютер управляет устройством возбуждения для периодического возбуждения поперечных волн, которые будут распространяться в ткани, в течение заранее установленного интервала. После возбуждения каждой поперечной волны осуществляют управление ультразвуковым преобразователем для передачи ультразвуковых волн, соответствующих поперечным волнам, и приема соответствующих ультразвуковых эхо-сигналов для анализа характеристик распространения поперечных волн в ткани.
В данном примере осуществления изобретения устройство возбуждения поперечных волн содержит что-либо из следующего: вибратор, ультразвуковой преобразователь и динамик.
Соответственно, режим возбуждения поперечных волн может быть таким, что вибратор прилагает низкочастотную кратковременную вибрацию к внешней поверхности ткани, чтобы создать поперечную волну в ткани; при этом ультразвуковая волна, передаваемая ультразвуковым преобразователем, фокусируется внутри ткани, чтобы генерировать силу акустического излучения так, чтобы создавать поперечные волны в ткани; и динамик генерирует звуковые волны с определенной частотой на внешней поверхности ткани так, чтобы создавать поперечные волны в ткани.
Следует учитывать, что в режиме, в котором поперечная волна генерируется ультразвуковым преобразователем, ультразвуковой преобразователь для генерирования поперечной волны и ультразвуковой преобразователь для передачи ультразвуковой волны и приема ультразвукового эхо-сигнала могут совпадать или отличаться.
Шаг 102: получение ультразвуковым преобразователем ультразвукового эхо-сигнала, соответствующего каждой поперечной волне.
Ультразвуковой преобразователь передает полученный ультразвуковой эхо-сигнал, соответствующий каждой поперечной волне, на основной управляющий компьютер, позволяя таким образом управляющему компьютеру выполнить последующую обработку каждого ультразвукового эхо-сигнала.
Шаг 103: получение характеристического параметра распространения каждой поперечной волны в соответствии с ультразвуковым эхо-сигналом, соответствующим каждой поперечной волне.
Шаг 104: расчет параметра эластичности ткани в соответствии с характеристическими параметрами N поперечных волн и плотностью ткани.
В данном примере осуществления изобретения после получения ультразвукового эхо-сигнала, соответствующего каждой поперечной волне, управляющий компьютер может выполнять анализ и обработку каждого ультразвукового эхо-сигнала для получения характеристического параметра распространения, соответствующего каждой поперечной волне, и параметры эластичности ткани получают в соответствии с характеристическим параметром распространения каждой поперечной волны.
В частности, управляющий компьютер может получать параметр перемещения ткани, соответствующий каждой поперечной волне, посредством выполнения обработки ультразвукового эхо-сигнала, соответствующего каждой поперечной волне, а затем характеристический параметр распространения каждой поперечной волны получают в соответствии с параметром перемещения ткани, соответствующим каждой поперечной волне.
При этом обработка каждого ультразвукового эхо-сигнала включает как минимум одно из следующего: взаимная пространственно-временная корреляция, взаимная спектральная корреляция, сумма квадратов ошибок, точечное отслеживание, отслеживание масштабно-инвариантных характерных точек, динамическое программирование, отслеживание перехода через ноль и поиск пиковых значений. Параметр перемещения ткани, соответствующий каждой поперечной волне, например, смещение или деформация, может быть получен посредством обработки каждого ультразвукового эхо-сигнала. Таким образом, характеристический параметр распространения, соответствующий каждой поперечной волне, например, скорость распространения или коэффициент ослабления с расстоянием, может быть получен на основе параметра перемещения ткани.
После получения характеристического параметра распространения каждой поперечной волны параметр эластичности ткани может быть рассчитан в соответствии с характеристическим параметром распространения каждой поперечной волны и плотностью ткани. Параметр эластичности содержит как минимум один из следующих параметров: модуль сдвига, модуль Юнга, упругость при сдвиге, сдвиговая вязкость, механическое сопротивление, время механической релаксации и анизотропия, причем получают преимущественно модуль сдвига или модуль Юнга.
В данном примере осуществления изобретения, так как всегда поддерживается контакт устройства возбуждения и ультразвукового преобразователя с поверхностью ткани в процессе множества (f) определений эластичности ткани, и управление стартом процессов множества определений с использованием устройства возбуждения и ультразвукового преобразователя осуществляется управляющим компьютером, отсутствует необходимость для оператора изменять положение устройства возбуждения и ультразвукового преобразователя на поверхности ткани каждый раз при старте процесса определения эластичности. Кроме того, управляющий компьютер может постоянно получать ультразвуковые эхо-сигналы, полученные ультразвуковым преобразователем во время каждого процесса определения эластичности, и после получения ультразвукового эхо-сигнала, соответствующего каждой поперечной волне, т. е. множества процессов определения эластичности, управляющий компьютер выполняет процесс концентрации ультразвуковых эхо-сигналов, чтобы получить характеристический параметр распространения, соответствующий каждой поперечной волне. Наконец, результаты определения эластичности ткани, т. е. параметры эластичности, получают в соответствии с характеристическим параметром распространения, соответствующим каждой поперечной волне и плотности ткани.
В частности, управляющий компьютер может рассчитать параметр эластичности ткани в соответствии с характеристическими параметрами распространения N поперечных волн и плотностью ткани двумя альтернативными способами, как показано на ФИГ. 2 и 3.
ФИГ. 2 представляет собой блок-схему одной конкретной реализации шага 104 показанного на ФИГ. 1 примера осуществления изобретения, как показано на ФИГ. 2, содержащего следующие шаги:
шаг 201: расчет среднего значения характеристических параметров распространения N поперечных волн; и
шаг 202: расчет параметра эластичности ткани в соответствии со средним значением характеристических параметров распространения N поперечных волн и плотностью ткани.
В данном примере осуществления изобретения возможно сначала рассчитать среднее значение характеристических параметров распространения, например, смещений, N поперечных волн, а затем выполняют расчет корреляции на основе среднего значения и плотности ткани, чтобы получить параметры эластичности ткани, например, модуль эластичности и модуль Юнга.
ФИГ. 3 представляет собой блок-схему другой конкретной реализации шага 104 показанного на ФИГ. 1 примера осуществления изобретения, как показано на ФИГ. 2, содержащего следующие шаги:
шаг 301: расчет параметра эластичности ткани, соответствующего каждой поперечной волне, в соответствии с характеристическим параметром распространения каждой поперечной волны и плотностью ткани;
шаг 302: расчет среднего значения параметров эластичности ткани, соответственно относящихся к N поперечным волнам, при этом параметр эластичности ткани является средним значением параметров эластичности ткани, соответственно относящихся к N поперечным волнам.
В данном примере осуществления изобретения возможно сначала рассчитать параметр эластичности ткани, соответствующий каждой поперечной волне, т. е. каждому процессу определения эластичности, а затем может быть рассчитано среднее значение N параметров вязкости, и данное среднее значение может быть использовано как окончательный параметр эластичности ткани.
В вышеописанном примере осуществления изобретения, когда требуется определение эластичности ткани, устройство возбуждения и ультразвуковой преобразователь удерживаются в контакте с поверхностью ткани, и управляющий компьютер управляет устройством возбуждения для постоянного и периодического возбуждения N поперечных волн в ткани в течение заранее установленного интервала времени без размещения устройства возбуждения вручную несколько раз на поверхности ткани, обеспечивая таким образом, что N поперечных волн возбуждаются относительно одного и того же положения, что способствует обеспечению точности окончательного результата определения параметра эластичности. После передачи ультразвуковой волны, соответствующей каждой поперечной волне, и приема ультразвукового эхо-сигнала, соответствующего каждой поперечной волне, ультразвуковым преобразователем, получают характеристический параметр распространения каждой поперечной волны в соответствии с ультразвуковым эхо-сигналом, соответствующим каждой поперечной волне. Наконец, параметр эластичности ткани рассчитывают в соответствии с характеристическим параметром распространения N поперечных волн и плотностью ткани. Так как устройство возбуждения и ультразвуковой преобразователь удерживаются в контакте с поверхностью ткани, получение ультразвуковых эхо-сигналов является постоянным, и, таким образом, может быть увеличена эффективность определения эластичности.
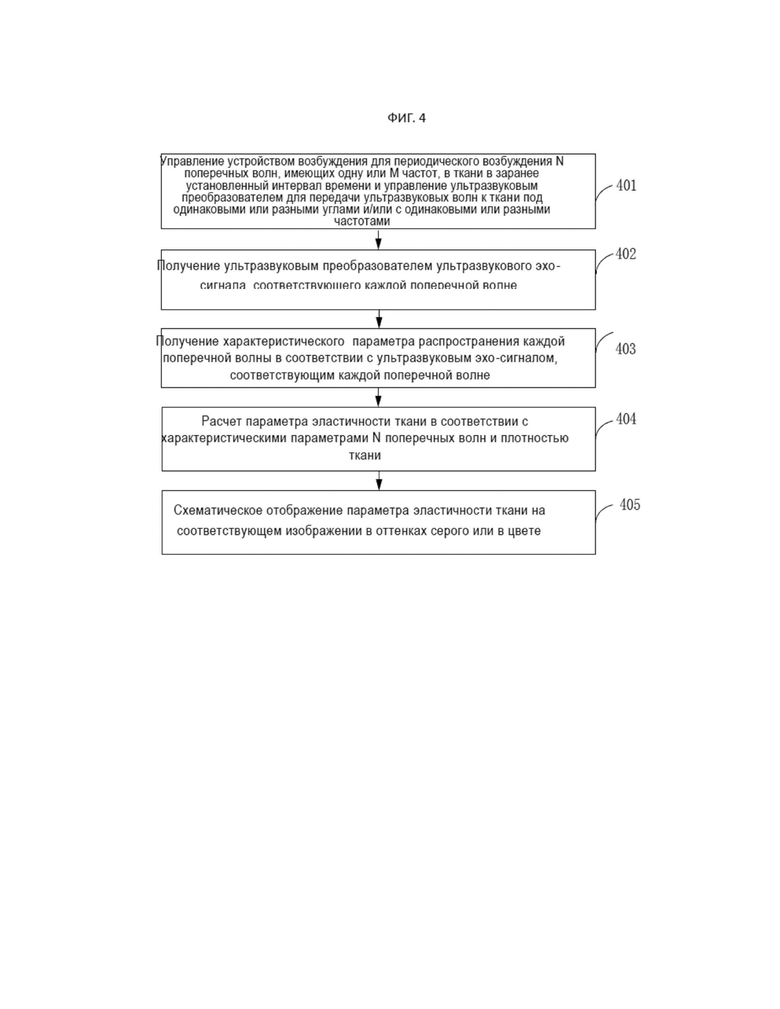
ФИГ. 4 представляет собой блок-схему второго примера осуществления способа определения эластичности согласно данному изобретению, и, как показано на ФИГ. 4, способ содержит следующие шаги:
шаг 401: управление устройством возбуждения для периодического возбуждения N поперечных волн, имеющих одну или М частот, в ткани в течение заранее установленного интервала времени и управление ультразвуковым преобразователем для передачи ультразвуковых волн к ткани под одинаковыми или разными углами и/или с одинаковыми или разными частотами, где 2 ≤ M ≤ N.
При этом 2 ≤ M ≤ N.
В данном примере осуществления изобретения, чтобы обеспечить более точный результат определения эластичности ткани, частоты N поперечных волн могут различаться, и, кроме того, углы и частоты передачи ультразвуковых волн и приема ультразвуковых эхо-сигналов ультразвуковым преобразователем могут различаться.
Например, в режиме, в котором вибратор возбуждает поперечную волну, возможно управлять вибратором для передачи механических вибраций с различными частотами так, чтобы в ткани могли быть возбуждены поперечные волны с различными частотами. В другом примере при возбуждении поперечных волн динамиком может осуществляться управление динамиком для передачи звуковых волн с различными частотами, с возбуждением таким образом поперечных волн с различными частотами.
Следует учитывать, что управление каждой поперечной волной и управление ультразвуковыми волнами может содержать одну из следующих комбинаций: возбуждение поперечных волн с одной частотой и передача ультразвуковых волн с одинаковой частотой к ткани под одним или разными углами; возбуждение поперечных волн с одной частотой и передача ультразвуковых волн с разными частотами к ткани под одним углом; возбуждение поперечных волн с М частот и передача ультразвуковых волн к ткани под одним углом или с одной частотой; и возбуждение поперечных волн с М частот и передача ультразвуковых волн к ткани под разными углами или с различными частотами и т. д.
В данном примере осуществления изобретения за счет управления устройством возбуждения и ультразвуковым преобразователем для генерирования поперечных волн с различными частотами и ультразвуковых волн под различными углами к ткани, измерение определения эластичности ткани диверсифицируется, что способствует увеличению точности и надежности результатов определения.
Шаг 402: получение ультразвуковым преобразователем ультразвукового эхо-сигнала, соответствующего каждой поперечной волне.
Шаг 403: получение характеристического параметра распространения каждой поперечной волны в соответствии с ультразвуковым эхо-сигналом, соответствующим каждой поперечной волне.
Шаг 404: расчет параметра эластичности ткани в соответствии с характеристическими параметрами распространения N поперечных волн и плотностью ткани.
Шаг 405: схематическое отображение параметра эластичности ткани на соответствующем изображении в оттенках серого или в цвете при составлении схемы в оттенках серого или в цвете.
В данном примере осуществления изобретения, чтобы более интуитивно понимать состояние эластичности ткани, рассчитанный параметр эластичности может быть отображен на схеме цветом, чтобы получить соответствующее изображение эластичности.
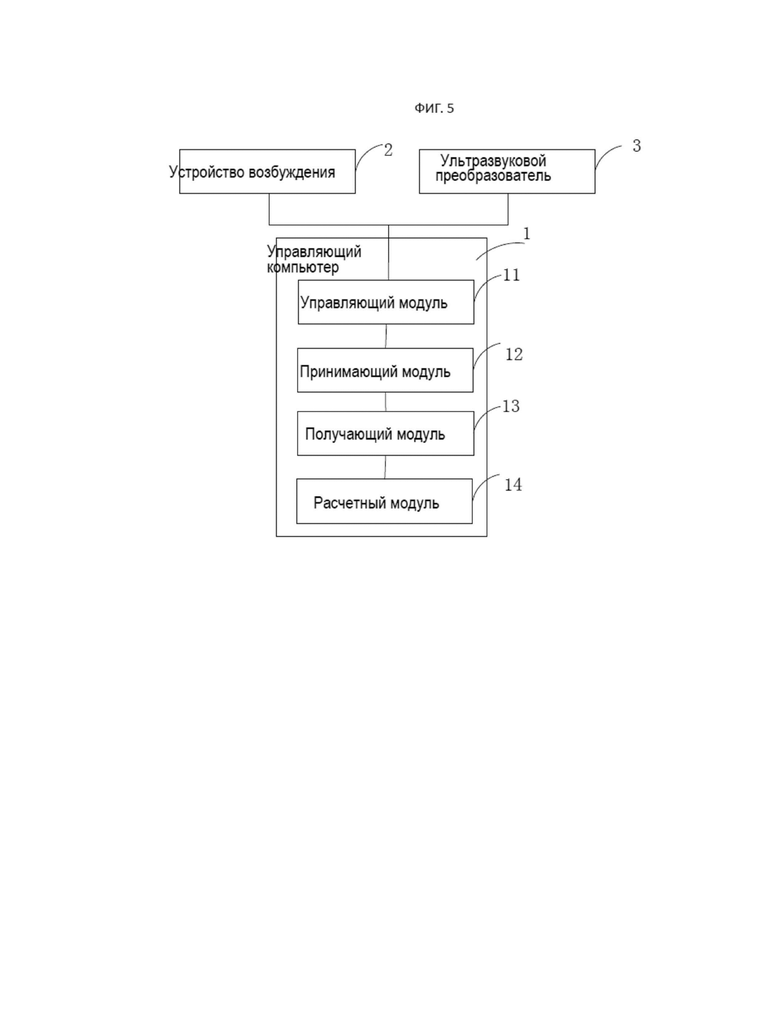
ФИГ. 5 представляет собой схему первого примера осуществления устройства для определения эластичности согласно данному изобретению, и, как показано на ФИГ. 5, устройство для определения эластичности содержит:
управляющий компьютер 1, устройство 2 возбуждения и ультразвуковой преобразователь 3.
Управляющий компьютер 1 содержит управляющий модуль 11, приемный модуль 12, получающий модуль 13 и расчетный модуль 14.
Управляющий модуль 11 сконфигурирован для управления устройством возбуждения, чтобы периодически возбуждать N поперечных волн в ткани в течение заранее установленного интервала времени и управлять ультразвуковым преобразователем для передачи ультразвуковой волны к ткани, где поддерживается контакт устройства возбуждения и ультразвукового преобразователя с поверхностью ткани, и N является целым больше 1.
Приемный модуль 12 сконфигурирован для получения ультразвуковым преобразователем ультразвукового эхо-сигнала, соответствующего каждой поперечной волне.
Получающий модуль 13 сконфигурирован для получения характеристического параметра распространения каждой поперечной волны в соответствии с ультразвуковым эхо-сигналом, соответствующим каждой поперечной волне.
Расчетный модуль 14 сконфигурирован для расчета параметра эластичности ткани в соответствии с характеристическими параметрами распространения N поперечных волн и плотностью ткани.
Устройство для определения эластичности в соответствии с настоящим примером осуществления изобретения может быть использовано в технических решениях примеров осуществления вышеуказанного способа и имеет аналогичный ему принцип реализации и технический эффект, и не будет повторяться здесь.
Специалистам в данной области техники следует понимать, что все или часть шагов примеров осуществления способа, раскрытые выше, могут быть выполнены с использованием соответствующего программного и аппаратного обеспечения, при этом программа может быть сохранена на машиночитаемом носителе. Во время исполнения программы будут выполнены шаги, включенные в примеры осуществления вышеуказанного способа. Вышеуказанный носитель содержит различные носители данных, способные хранить программный код, такие как ОЗУ, ПЗУ, магнитный диск или оптический диск.
Наконец, следует учитывать, что вышеуказанные примеры осуществления изобретения предназначены только для иллюстрации, а не для ограничения технических решений настоящего изобретения; несмотря на то, что настоящее изобретение подробно раскрыто со ссылкой на вышеуказанные примеры осуществления, специалисты в данной области техники должны понимать, что могут быть произведены изменения технических решений, зафиксированных в вышеизложенных примерах осуществления, или могут быть произведены эквивалентные замены части или всех технических характеристик. Эти изменения и замены не приводят к отклонению сущности соответствующих технических решений от объема технических решений примеров осуществления изобретения в настоящей заявке.
Группа изобретений относятся к области техники медицинских приборов, а именно к способу и устройству для определения эластичности. Способ определения эластичности биологической ткани, содержит шаг 1, включающий поддержание устройства возбуждения и ультразвукового преобразователя в контакте с поверхностью ткани управление устройством возбуждения для периодического возбуждения N поперечных волн, имеющих одну или М частот, в ткани в течение заранее установленного интервала времени и управление ультразвуковым преобразователем для передачи ультразвуковой волны к ткани под одинаковыми или разными углами и/или частотами, при этом число N является целым больше 1, а 2 ≤ M ≤ N; шаг 2, включающий получение ультразвуковым преобразователем ультразвукового эхо-сигнала, соответствующего каждой поперечной волне; шаг 3, включающий получение характеристического параметра распространения каждой поперечной волны в соответствии с ультразвуковым эхо-сигналом; шаг 4, включающий расчет параметра эластичности ткани в соответствии с характеристическими параметрами N поперечных волн и плотностью ткани. Устройство содержит управляющий компьютер, устройство возбуждения и ультразвуковой преобразователь, при этом управляющий компьютер включает управляющий модуль, приемный модуль, получающий модуль и расчетный модуль. Использование группы изобретений позволяет увеличить эффективность определения эластичности ткани. 2 н. и 7 з.п. ф-лы, 5 ил.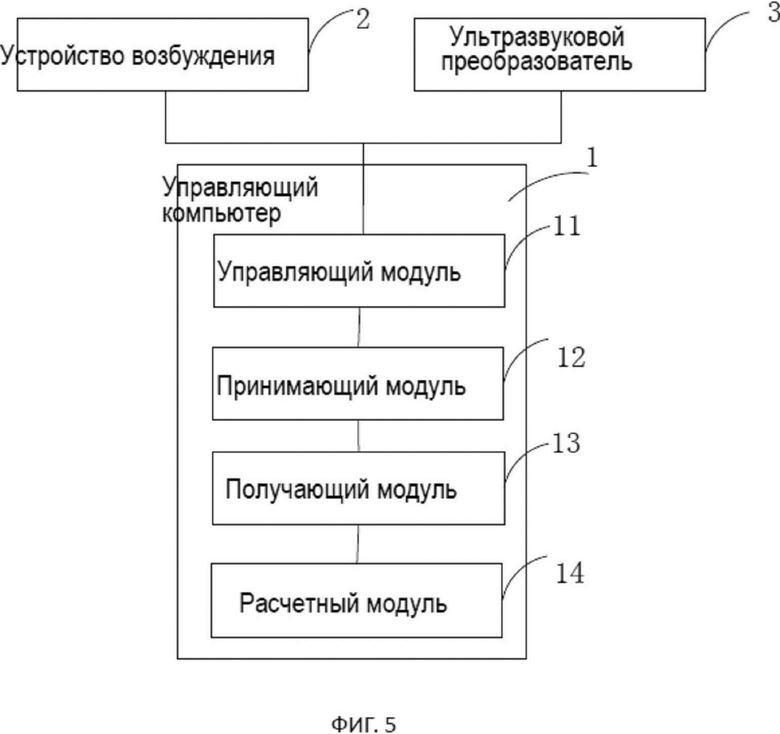
1. Способ определения эластичности биологической ткани, включающий:
шаг 1: поддержание устройства возбуждения и ультразвукового преобразователя в контакте с поверхностью ткани; управление устройством возбуждения для периодического возбуждения N поперечных волн, имеющих одну или М частот, в ткани в течение заранее установленного интервала времени и управление ультразвуковым преобразователем для передачи ультразвуковой волны к ткани под одинаковыми или разными углами и/или частотами, при этом число N является целым больше 1, а 2 ≤ M ≤ N;
шаг 2: получение ультразвуковым преобразователем ультразвукового эхо-сигнала, соответствующего каждой поперечной волне;
шаг 3: получение характеристического параметра распространения каждой поперечной волны в соответствии с ультразвуковым эхо-сигналом, соответствующим каждой поперечной волне;
шаг 4: расчет параметра эластичности ткани в соответствии с характеристическими параметрами N поперечных волн и плотностью ткани.
2. Способ по п.1, в котором шаг 3 содержит:
получение параметра перемещения ткани, соответствующего каждой поперечной волне, посредством обработки ультразвукового эхо-сигнала, соответствующего каждой поперечной волне; и
получение характеристического параметра распространения каждой поперечной волны в соответствии с параметром перемещения ткани, соответствующим каждой поперечной волне.
3. Способ по п. 2, в котором обработка сигнала содержит как минимум одно из следующего: взаимная пространственно-временная корреляция, взаимная спектральная корреляция, сумма квадратов ошибок, точечное отслеживание, отслеживание масштабно-инвариантных характерных точек, динамическое программирование, отслеживание перехода через ноль и поиск пиковых значений;
параметр перемещения ткани содержит смещение или деформацию; характеристический параметр распространения содержит скорость распространения или коэффициент ослабления с расстоянием.
4. Способ по п.1, в котором шаг 4 содержит:
расчет среднего значения характеристических параметров распространения N поперечных волн; и
расчет параметра эластичности ткани в соответствии со средним значением характеристических параметров распространения N поперечных волн и плотностью ткани.
5. Способ по п.1, в котором шаг 4 содержит:
расчет параметра эластичности ткани, соответствующего каждой поперечной волне, в соответствии с характеристическим параметром распространения каждой поперечной волны и плотностью ткани; и
расчет среднего значения параметров эластичности ткани, относящихся к N поперечных волн, и параметр эластичности ткани является средним значением параметров эластичности ткани, относящихся к N поперечных волн.
6. Способ по п. 1, в котором после шага 4 способ дополнительно содержит:
схематическое отображение параметра эластичности ткани на соответствующем изображении в оттенках серого или в цвете при использовании оттенков серого или цвета.
7. Способ по любому из пп. 1–6, в котором устройство возбуждения содержит любое из следующих устройств: вибратор, ультразвуковой преобразователь и динамик.
8. Способ по любому из пп. 1-6, в котором параметр эластичности содержит как минимум один из следующих параметров: модуль сдвига, модуль Юнга, упругость при сдвиге, сдвиговая вязкость, механическое сопротивление, время механической релаксации и анизотропия.
9. Устройство для определения эластичности биологической ткани, содержащее:
управляющий компьютер, устройство возбуждения и ультразвуковой преобразователь; причем устройство возбуждения и ультразвуковой преобразователь находятся в контакте с поверхностью ткани; при этом
управляющий компьютер содержит:
управляющий модуль, сконфигурированный для управления устройством возбуждения для периодического возбуждения N поперечных волн, имеющих одну или М частот, в ткани в течение заранее установленного интервала времени и управления ультразвуковым преобразователем для передачи ультразвуковой волны к ткани под одинаковыми или разными углами и/или частотами, при этом число N является целым больше 1, а 2 ≤ M ≤ N;
приемный модуль, сконфигурированный для получения ультразвуковым преобразователем ультразвукового эхо-сигнала, соответствующего каждой поперечной волне;
получающий модуль, сконфигурированный для получения характеристического параметра распространения каждой поперечной волны в соответствии с ультразвуковым эхо-сигналом, соответствующим каждой поперечной волне; и
расчетный модуль, сконфигурированный для расчета параметра эластичности ткани в соответствии с характеристическими параметрами распространения N поперечных волн и плотностью ткани.
| CN 104380134 A, 25.02.2015 | |||
| US 2013317362 A1, 28.11.2013 | |||
| CN 104825195 A, 12.08.2015 | |||
| RU 2012105462 A, 27.08.2013. |

