Область техники, к которой относится настоящее изобретение
Эта заявка относится к области техники медицинской визуализации и, в частности, к способу и устройству для измерения эластичности ткани.
Предшествующий уровень техники настоящего изобретения
Различные хронические заболевания, такие как вирусные гепатиты (гепатит А, гепатит В, гепатит С и т.п.), при их развитии сопровождаются фиброзом пораженной ткани, причем процесс фиброза ткани может сопровождаться изменениями в эластичности ткани. Таким образом, информация об эластичности ткани является параметром, который можно использовать для диагностики степени фиброза ткани.
Транзиентная эластография (ТЕ) представляет собой метод количественного измерения модуля эластичности ткани, который может всесторонне отражать степень фиброза ткани путем измерения жесткости печени (LSM).
Однако транзиентная эластография не может получить информацию о структуре ткани в области измерения, особенно информацию о двухмерной структуре ткани. Как правило, специалисты могут только установить и настроить ультразвуковой зонд для транзиентной эластографии на основании опыта. Соответственно, во время измерения эластичности ткани ультразвуковой зонд измеряет область измерения для создания изображения. Однако по неизбежным причинам могут возникать ошибки измерения, например перемещения тканей, вызванные дыханием и сердцебиением и т.д., также как и факторы влияния, например крупные кровеносные сосуды, кисты или асцит и т.д., которые могут содержаться в измеряемой области. Таким образом, необходимо рассмотреть вопрос о том, как при выборе области измерения избежать описанных выше ситуаций и выбрать область измерения, которая менее подвержена влиянию.
В предшествующих уровнях техники все еще существует потребность в эффективном решении проблемы выбора области измерения с меньшим влиянием на динамику ткани во время измерения эластичности ткани.
Краткое раскрытие настоящего изобретения
Принимая во внимание существующую в предшествующем уровне техники проблему выбора области измерения с меньшим влиянием на динамику ткани во время измерения эластичности ткани, в настоящем изобретении представлены способ и устройство для измерения эластичности ткани для решения по меньшей мере вышеуказанной проблемы.
В соответствии с аспектом настоящего изобретения представлен способ измерения эластичности ткани, и способ предусматривает:
подачу первого ультразвукового сигнала в ткань в области измерения, отслеживая по меньшей мере одну линию изображения первого ультразвукового сигнала;
определение в соответствии с линией изображения во множестве временных точек состояния движения каждой линии изображения; и
выбор положения с учетом линии изображения с состоянием движения, удовлетворяющим заданному условию, и выполнение измерения эластичности ткани.
В варианте осуществления подача первого ультразвукового сигнала в ткань в области измерения предусматривает:
выполнение ультразвукового сканирования путем управления N элементами ультразвуковой матрицы на зонде измерения эластичности для образования по меньшей мере одной линии изображения первого ультразвукового сигнала, причем N составляет положительное целое число.
В варианте осуществления состояние движения характеризуется множеством параметров движения; и когда множество параметров движения удовлетворяют соответствующим заданным условиям, определяют, что состояние движения удовлетворяет заданному условию.
В варианте осуществления измерение эластичности ткани предусматривает: подачу сдвиговых волн в ткань в области измерения; управление М элементами ультразвуковой матрицы на зонде для подачи второго ультразвукового сигнала в выбранное положение и получение эхо-сигнала второго ультразвукового сигнала; и обработку эхо-сигнала второго ультразвукового сигнала для измерения эластичности ткани, причем М составляет положительное целое число.
В варианте осуществления способ дополнительно предусматривает перед подачей первого ультразвукового сигнала в ткань в области измерения:
управление R элементами ультразвуковой матрицы на зонде для подачи третьего ультразвукового сигнала в ткань в области измерения и получение эхо-сигнала третьего ультразвукового сигнала, чтобы определить положение области измерения, причем R составляет положительное целое число.
В соответствии с другим аспектом настоящего изобретения также предусмотрено устройство для измерения эластичности ткани, и устройство для измерения эластичности ткани содержит компьютер управления и зонд измерения эластичности;
зонд измерения эластичности подает первый ультразвуковой сигнал в ткань в области измерения;
компьютер управления отслеживает по меньшей мере одну линию изображения первого ультразвукового сигнала;
компьютер управления определяет, в соответствии с линией изображения во множестве временных точек, состояние движения каждой линии изображения; и
компьютер управления выбирает положение с учетом линии изображения с состоянием движения, удовлетворяющим заданному условию, и зонд измерения эластичности выполняет измерение эластичности ткани.
В варианте осуществления компьютер управления выполняет ультразвуковое сканирование путем управления N элементами ультразвуковой матрицы на зонде измерения эластичности для образования по меньшей мере одной линии изображения первого ультразвукового сигнала, причем N составляет положительное целое число.
В варианте осуществления состояние движения характеризуется множеством параметров движения, и когда множество параметров движения удовлетворяют соответствующим заданным условиям, определяют, что состояние движения удовлетворяет заданному условию.
В варианте осуществления компьютер управления передает сдвиговые волны в ткань в области измерения; компьютер управления управляет М элементами ультразвуковой матрицы на зонде измерения эластичности для подачи второго ультразвукового сигнала в выбранное положение и получения эхо-сигнала второго ультразвукового сигнала; и обрабатывает эхо-сигнал второго ультразвукового сигнала, причем М составляет положительное целое число.
В варианте осуществления перед тем, как зонд измерения эластичности подает первый ультразвуковой сигнал в ткань в области измерения, компьютер управления управляет R элементами ультразвуковой матрицы на зонде измерения эластичности для подачи третьего ультразвукового сигнала в ткань в области измерения и получения эхо-сигнала третьего ультразвукового сигнала, чтобы определить положение области измерения, причем R составляет положительное целое число.
Путем подачи первого ультразвукового сигнала в ткань в области измерения; отслеживания по меньшей мере одной линии изображения первого ультразвукового сигнала; определения состояния движения каждой линии изображения, в соответствии с линией изображения во множестве временных точек; и выбора положения с учетом линии изображения с состоянием движения, удовлетворяющим заданному условию, и выполнения измерения эластичности ткани в настоящем изобретении решена проблема влияния состояния движения предмета в измеряемой области на точность измерения эластичности и повышает точность измерения эластичности ткани в области измерения.
Краткое описание фигур
Прилагаемые фигуры, описанные в данном документе, использованы для обеспечения дополнительного понимания настоящего изобретения и составляют часть этой заявки. Иллюстративные варианты осуществления настоящего изобретения и их описание использованы для объяснения настоящего изобретения и не составляют какого-либо ненадлежащего ограничения настоящего изобретения. На чертежах:
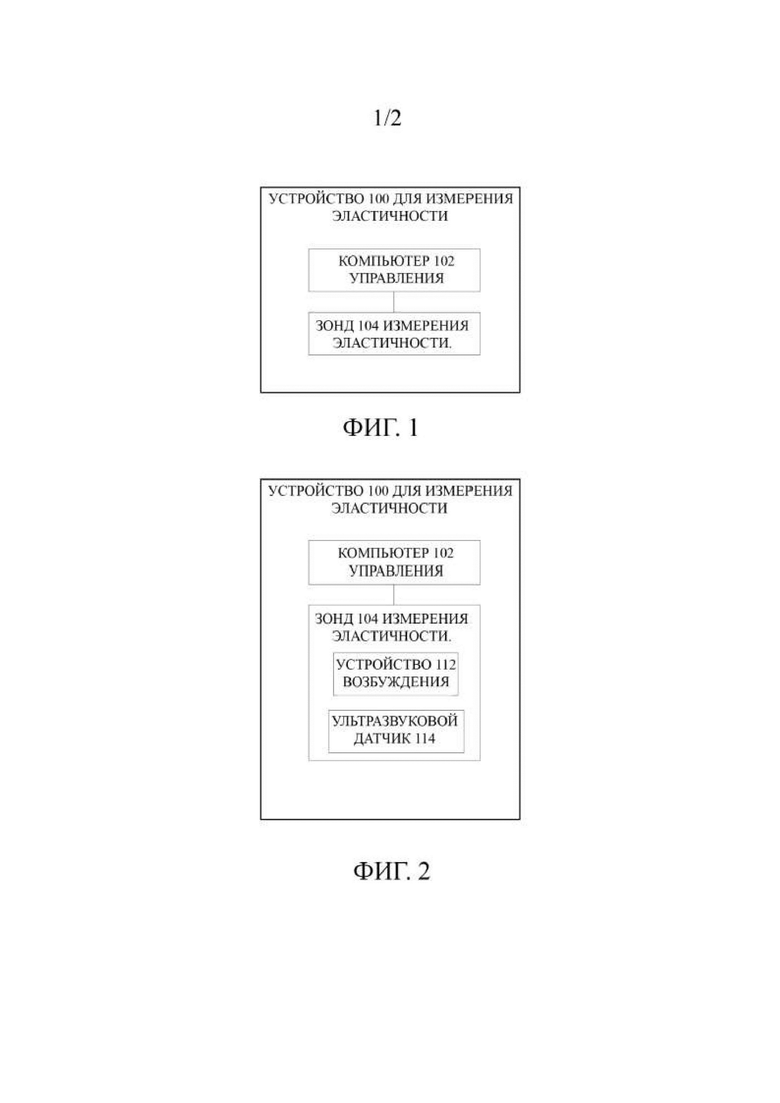
на фиг. 1 представлена структурная блок-схема 1 устройства для измерения эластичности ткани в соответствии с вариантом осуществления настоящего изобретения;
на фиг. 2 представлена структурная блок-схема 2 устройства для измерения эластичности ткани в соответствии с вариантом осуществления настоящего изобретения;
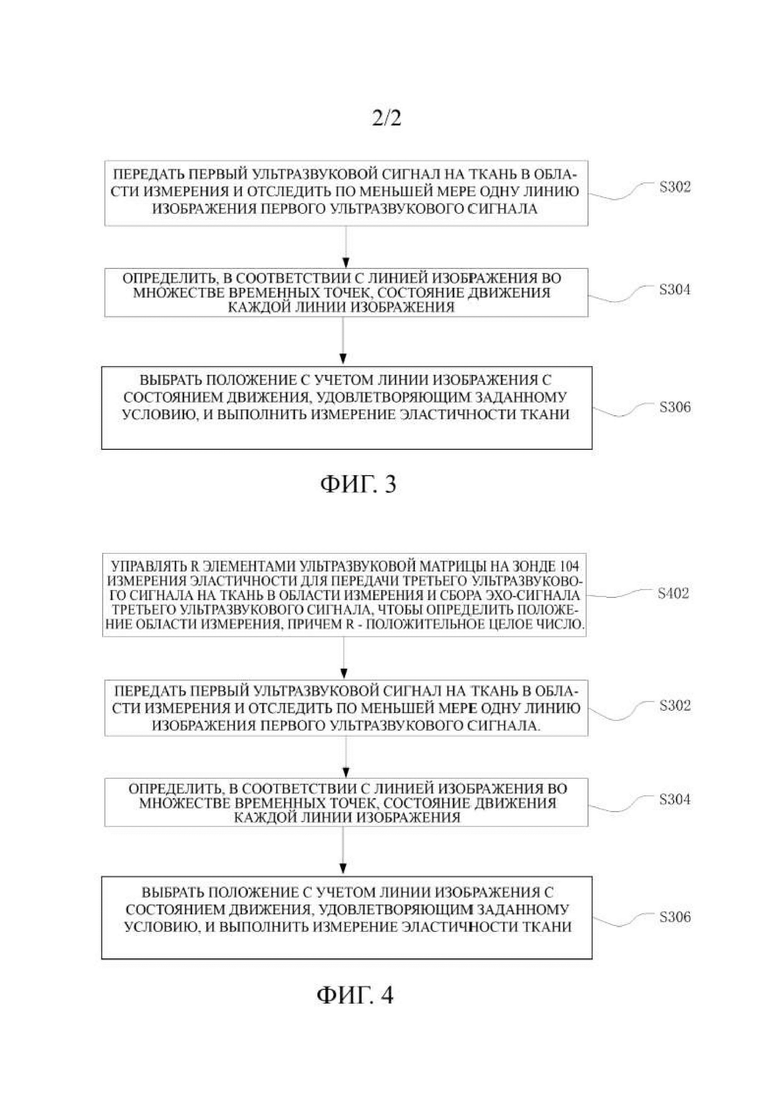
на фиг. 3 представлена блок-схема 1 способа измерения эластичности ткани в соответствии с вариантом осуществления настоящего изобретения; и
на фиг. 4 представлена блок-схема 2 способа измерения эластичности ткани в соответствии с вариантом осуществления настоящего изобретения.
Подробное раскрытие настоящего изобретения
Чтобы прояснить цели, технические решения и преимущества данной заявки, далее настоящая заявка дополнительно подробно описана со ссылкой на прилагаемые фигуры и варианты осуществления. Следует понимать, что конкретные варианты осуществления, описанные в данном документе, использованы только для иллюстрации и не предназначены для использования в качестве ограничения данной заявки.
В вариантах осуществления настоящего изобретения на фиг. 1 представлена структурная блок-схема 1 устройства для измерения эластичности ткани в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 1, устройство 100 измерения эластичности ткани содержит компьютер 102 управления и зонд 104 измерения эластичности. На фиг. 2 представлена структурная блок-схема 2 устройства для измерения эластичности ткани в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 2, зонд 104 измерения эластичности содержит устройство 112 возбуждения и ультразвуковой датчик 114. Устройство 112 возбуждения и ультразвуковой датчик 114 могут быть встроены в зонд 104 измерения эластичности, и компьютер 102 управления, или зонд 104 измерения эластичности подает сигнал управления на устройство 112 возбуждения и ультразвуковой датчик 114, чтобы выполнить измерение измеряемой области. Устройство 112 возбуждения сдвиговой волны содержит любой из следующих приборов: вибратор, ультразвуковой датчик и динамик.
Процесс возбуждения сдвиговой волны предусматривает следующее: вибратор подает низкочастотную мгновенную вибрацию на внешнюю поверхность ткани для генерирования сдвиговых волн в ткани; ультразвуковые волны, излучаемые ультразвуковым датчиком 114, фокусируются внутри ткани для генерирования силы звукового излучения, чтобы сгенерировать сдвиговые волны внутри ткани; динамик генерирует звуковые волны определенной частоты на внешней поверхности ткани, чтобы сгенерировать сдвиговые волны в ткани.
Следует отметить, что в способе использования ультразвукового датчика 114 для генерирования сдвиговых волн, ультразвуковой датчик 114 для генерирования сдвиговых волн и ультразвуковой датчик 114 для подачи ультразвуковых волн и приема ультразвуковых эхо-сигналов могут быть одним и тем же или двумя разными.
Ультразвуковой эхо-сигнал, соответствующий каждой сдвиговой волне, получают с помощью ультразвукового датчика 114. Ультразвуковой датчик 114 посылает полученный ультразвуковой эхо-сигнал, соответствующий каждой сдвиговой волне, в компьютер 102 управления, так чтобы компьютер 102 управления выполнял последующую обработку каждого ультразвукового эхо-сигнала.
Характеристический параметр распространения каждой сдвиговой волны получают соответственно на основании ультразвукового эхо-сигнала, соответствующего каждой сдвиговой волне. В соответствии с этими характеристическими параметрами распространения и плотностью ткани измеряемой области, путем расчета получают параметр эластичности измеряемой области. Процесс измерения эластичности предусматривает следующее:
Устройство 112 возбуждения подает низкочастотную мгновенную вибрацию на внешнюю поверхность ткани в измеряемой области, так чтобы сгенерировать сдвиговые волны в ткани; затем ультразвуковой датчик 114 подает ультразвуковые волны в ткань и собирает ультразвуковые эхо, и компьютер 102 управления выполняет расчет эластичности ткани в соответствии с собранными ультразвуковыми эхо-сигналами.
В другом варианте осуществления настоящего изобретения на фиг. 3 представлена блок-схема 1 способа измерения эластичности ткани в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 3, способ предусматривает следующие этапы.
Этап S302. Передача первого ультразвукового сигнала в ткань в области измерения и отслеживание по меньшей мере одной линии изображения первого ультразвукового сигнала.
Этап S304. Определение, в соответствии с линией изображения во множестве временных точек, состояния движения каждой линии изображения.
Этап S306. Выбор положения с учетом линии изображения с состоянием движения, удовлетворяющим заданному условию, и выполнение измерения эластичности ткани.
В настоящем изобретении измерение эластичности ткани выполняют путем подачи первого ультразвукового сигнала в ткань в области измерения; отслеживания по меньшей мере одной линии изображения первого ультразвукового сигнала; определения, в соответствии с линией изображения во множестве временных точек, состояния движения каждой линии изображения; и выбора положения с учетом линии изображения с состоянием движения, удовлетворяющим заданному условию. Путем автоматического выбора одного или нескольких положений линий изображения с состояниями движения, удовлетворяющими заданному условию, посредством одного измерения вышеуказанной первой ультразвуковой волны для определения одного или нескольких положений измерения эластичности ткани, настоящее изобретение решает проблему влияния состояния движения предмета в измеряемой области на точность измерения эластичности и повышает точность измерения эластичности ткани в области измерения.
В данном варианте осуществления устройство 100 для измерения эластичности ткани содержит зонд 104 измерения эластичности. В случае, если зонд 104 измерения эластичности содержит ультразвуковой датчик 114, может быть выбрана заданная область возбуждения зонда на ультразвуковом датчике 114. Заданная область возбуждения зонда соответствует N компонентам элемента матрицы, причем N составляет положительное целое число. N компонентов элемента матрицы посылают первый ультразвуковой сигнал посредством разных способов группового сканирования для образования по меньшей мере одной линии изображения, отслеживают значения измерения по меньшей мере одной линии изображения, и определяют значение параметра движения в разных положениях ткани в области измерения в соответствии со значением параметра движения каждой линии изображения. Поскольку ультразвуковой датчик 114 может иметь множество областей возбуждения зонда на зонде 104 измерения эластичности, области возбуждения зонда могут быть выбраны посредством некоторых экспериментов или компьютерного моделирования. Это означает выбор области возбуждения зонда с малой интерференцией между элементами матрицы и соответствующие элементу матрицы с более высокой точностью измерения, тем самым улучшая точность измерения эластичности сдвиговых волн.
В данном варианте осуществления зонд 104 измерения эластичности получает данные ультразвукового измерения ткани в области измерения, и данные измерения предусматривают: отслеживание значения измерения по меньшей мере одной линии изображения ультразвуковой волны, и определение значения параметра движения области измерения в соответствии со значением измерения во множестве временных точек. Состояние движения по вышеуказанному варианту осуществления характеризуется множеством параметров движения, причем зонд 104 измерения эластичности (двумерное изображение или трехмерное изображение) выбирает множество фрагментов данных одной или нескольких линий изображения в динамике. Взаимная корреляция, оптический поток и другие способы согласования блоков, вычисление или фильтрация разности фаз и другие способы используют для расчета значений параметров движения между двумя последовательными временными точками или несколькими временными точками с интервалом, можно выбрать значение параметра движения, соответствующее линии изображения в ткани в области измерения, чтобы отслеживать и определять состояние движения каждой линии изображения. В случае, если состояния движения некоторых линий изображения превышают пороговый диапазон, измерение сдвиговой волны не выполняют на ткани в области измерения, соответствующей некоторым линиям изображения, и только, если значения параметра движения состояний движения некоторых линий изображения меньше заданного порогового значения, измерение сдвиговой волны выполняют на ткани в области измерения, соответствующей некоторым линиям изображения. В качестве альтернативы, в случае, если значения параметра движения всех линий изображения ткани в области измерения меньше заданного порогового значения, определяют, что ткань в области измерения является положением измерения сдвиговой волны. В данном варианте осуществления посредством измерения одной линии ультразвукового изображения на вышеуказанном зонде 104 измерения эластичности, одно или несколько положений с учетом линии изображения с состоянием движения, удовлетворяющим заданному условию, автоматически выбирают для определения одного или нескольких положений измерения для измерения эластичности ткани. В вышеуказанном способе отслеживания состояния движения каждой линии изображения в отдельности, выбирают пределы ткани в области измерения, в которых может быть выполнено измерение сдвиговой волны; в качестве альтернативы, способ может указать на то, что измерение сдвиговой волны не может быть выполнено на части участков ткани в области измерения, и дать указание тестерам выполнить измерения на других участках ткани.
В данном варианте осуществления время определения состояния движения ткани в области измерения может быть до или после подачи сдвиговых волн устройством 100 для измерения эластичности ткани. В данном документе после того, как устройство 100 для измерения эластичности ткани передаст сдвиговые волны в ткань в области измерения, компьютер 102 управления может определить ткань в области измерения, соответствующей линии изображения, в качестве положения измерения эластичности, если значение параметра движения меньше, чем заданный порог. М элементами ультразвуковой матрицы на зонде 104 измерения эластичности управляют для подачи второго ультразвукового сигнала в выбранное положение измерения эластичности и получения эхо-сигнала второго ультразвукового сигнала, и обрабатывают эхо-сигнал второго ультразвукового сигнала для измерения эластичности ткани, причем М составляет положительное целое число. Прежде, чем устройство 100 измерения эластичности ткани передаст сдвиговые волны в ткань в области измерения компьютер 102 управления может также определять линию изображения во множестве временных точек первой ультразвуковой волны для определения значения параметра движения каждой линии изображения. В случае, если значение параметра движения меньше заданного порогового значения, устройство 100 для измерения эластичности ткани передает сдвиговые волны в ткань в области измерения, управляет М элементами ультразвуковой матрицы на зонде 104 измерения эластичности для подачи второго ультразвукового сигнала в выбранное положение измерения эластичности и получения эхо-сигнала второго ультразвукового сигнала, и обрабатывает эхо-сигнал второго ультразвукового сигнала для измерение эластичности ткани, причем М составляет положительное целое число.
В другом варианте осуществления настоящего изобретения на фиг. 4 представлена блок-схема 2 способа измерения эластичности ткани в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 4, способ предусматривает следующие этапы.
Этап S402. Управление R элементами ультразвуковой матрицы на зонде 104 измерения эластичности для подачи третьего ультразвукового сигнала в ткань в области измерения и получения эхо-сигнала третьего ультразвукового сигнала, чтобы определить положение области измерения, причем R составляет положительное целое число.
Этап S302. Подача первого ультразвукового сигнала в ткань в области измерения и отслеживание по меньшей мере одной линии изображения первого ультразвукового сигнала.
Этап S304. Определение, в соответствии с линией изображения во множестве временных точек, состояния движения каждой линии изображения.
Этап S306. Выбор положения с учетом линии изображения с состоянием движения, удовлетворяющего заданному условию, и выполнение измерения эластичности ткани.
Посредством вышеуказанных этапов устройство 100 для измерения эластичности ткани определяет положение ткани в области измерения путем подачи третьего ультразвукового сигнала в ткань в области измерения и получения эхо-сигнала третьего ультразвукового сигнала, и дает указание программе контроля выбрать область измерения. Например, в случае измерения области печени человека, ультразвуковая волна формирует изображение внутри тела человека, избегая кости, крупные кровеносные сосуды, кисты или область асцита, и программа контроля выбирает область печени.
Реализация вышеуказанного способа измерения эластичности ткани в вышеуказанном устройстве 100 для измерения эластичности ткани может предусматривать подачу первого ультразвукового сигнала в ткань в области измерения, что предусматривает:
выполнение ультразвукового сканирования N элементами ультразвуковой матрицы на зонде 104 измерения эластичности под управлением компьютера 102 управления для образования по меньшей мере одной линии изображения первого ультразвукового сигнала, причем N составляет положительное целое число; отслеживание значения параметра движения линии изображения первого ультразвукового сигнала; и получение компьютером 102 управления значения параметра движения для определения состояния движения ткани в области измерения;
определение компьютером 102 управления, является ли значение параметра движения линии изображения меньше заданного порогового значения; и
в случае, если значение параметра движения меньше заданного порогового значения, определение компьютером 102 управления, что ткань в области измерения, соответствующая линии изображения, является положением для измерения эластичности, и выполнение зондом 104 измерения эластичности измерения эластичности измеряемой области.
В варианте осуществления предусмотрено компьютерное устройство, содержащее запоминающее устройство и процессор, в запоминающем устройстве хранится компьютерная программа, и процессор при выполнении компьютерной программы осуществляет вышеуказанные этапы измерения эластичности.
Специалисту в данной области будет понятно, что некоторые или все процессы реализации вышеуказанного способа в вариантах осуществления могут быть реализованы путем инструктирования соответствующего оборудования через компьютерную программу. Компьютерная программа может быть сохранена на энергонезависимом машиночитаемом носителе данных, и при выполнении компьютерной программы в ней могут содержаться процессы вариантов осуществления вышеуказанных способов. Любая ссылка на запоминающее устройство, хранилище, базу данных или другой носитель, используемый в вариантах осуществления, предусмотренных в настоящей заявке, может предусматривать энергонезависимое и/или энергозависимое запоминающее устройство. Энергонезависимое запоминающее устройство может содержать постоянное запоминающее устройство (ROM), программируемое ROM (PROM), электрически программируемое ROM (EPROM), электрически стираемое программируемое ROM (EEPROM), или кэш-память. Энергонезависимое запоминающее устройство может содержать оперативное запоминающее устройство (RAM) или внешнюю кэш-память. В качестве иллюстрации, но не ограничения, RAM доступно в различных формах, таких как статическое RAM (SRAM), динамическое RAM (DRAM), синхронное DRAM (SDRAM), SDRAM с удвоенной скоростью подачи данных (DDRSDRAM), расширенное SDRAM (ESDRAM), канал синхронизации (Synchlink) DRAM (SLDRAM), Рамбус (Rambus) прямое RAM (RDRAM), прямое Rambus динамическое RAM (DRDRAM) и Rambus динамическое RAM (RDRAM).
Различные технические признаки вышеуказанных вариантов осуществления можно произвольно комбинировать. Для краткого изложения описаны не все возможные комбинации технических признаков в вышеуказанных вариантах осуществления. Однако при условии, что в комбинации этих технических признаков нет противоречий, они должны считаться входящими в объем данного изобретения.
Вышеуказанные варианты осуществления включают только несколько реализаций этой заявки, хотя их описания являются конкретными и подробными, они не должны рассматриваться как какое-либо ограничение объема патента на изобретение. Заметим, что специалистом в данной области могут быть предложены различные модификации и усовершенствования, не отступающие от концепции данной заявки, и все они подпадают под объем охраны данной заявки. Таким образом, объем патентной охраны данной заявки подпадает под действие прилагаемой формулой изобретения.
Группа изобретений относится к медицине. Предлагаются способ и устройство для измерения эластичности ткани, при этом способ предусматривает: подачу первого ультразвукового сигнала в ткань в области измерения; отслеживание по меньшей мере одной линии изображения первого ультразвукового сигнала; определение, в соответствии с линией изображения во множестве временных точек, состояния движения каждой линии изображения; и выбор положения с учетом линии изображения с состоянием движения, удовлетворяющим заданному условию, и выполнение измерения эластичности ткани. Применение данной группы изобретений позволит повысить точность измерения эластичности ткани в области измерения. 2 н. и 6 з.п. ф-лы, 4 ил.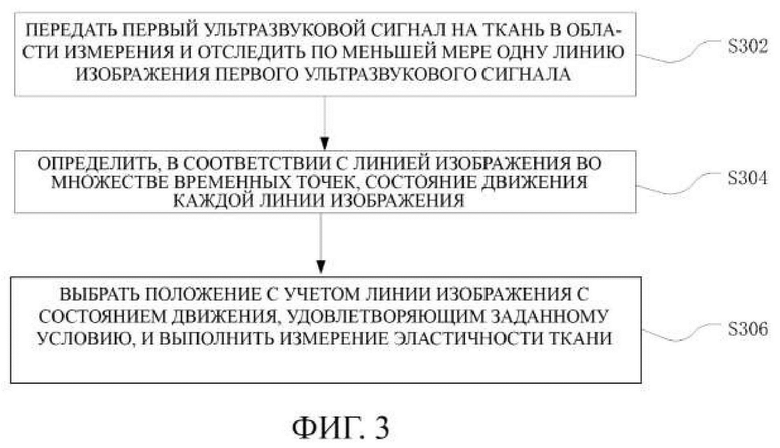
1. Способ измерения эластичности ткани, предусматривающий:
подачу первого ультразвукового сигнала в ткань в области измерения;
выполнение ультразвукового сканирования посредством управления N элементами ультразвуковой матрицы на зонде измерения эластичности для образования по меньшей мере одной линии изображения первого ультразвукового сигнала, при этом N составляет положительное целое число;
отслеживание по меньшей мере одной линии изображения первого ультразвукового сигнала; и отслеживание значения измерений по меньшей мере одной линии изображения;
определение в соответствии с линией изображения в по меньшей мере двух временных точках состояния движения каждой линии изображения; причем определяют значение параметра движения каждой линии из по меньшей мере одной линии изображения в соответствии со значением измерения в указанных по меньшей мере двух временных точках, определяют значение параметра движения в разных положениях ткани в области измерения в соответствии со значением параметра движения каждой линии изображения; и
выбор положения с учетом линии изображения с состоянием движения, удовлетворяющим заданному условию, и выполнение измерения эластичности ткани.
2. Способ по п. 1, при этом состояние движения характеризуется по меньшей мере двумя параметрами движения; и, когда указанные параметры движения удовлетворяют соответствующим заданным условиям, определяют, что состояние движения удовлетворяет заданному условию.
3. Способ по п. 2, при этом измерение эластичности ткани предусматривает: подачу сдвиговых волн в ткань в области измерения; управление M элементами ультразвуковой матрицы на зонде для подачи второго ультразвукового сигнала в выбранное положение и получение эхо-сигнала второго ультразвукового сигнала; и обработку эхо-сигнала второго ультразвукового сигнала для измерения эластичности ткани, при этом M составляет положительное целое число.
4. Способ по п. 2, при этом способ дополнительно предусматривает, перед подачей первого ультразвукового сигнала в ткань в области измерения: управление R элементами ультразвуковой матрицы на зонде для подачи третьего ультразвукового сигнала в ткань в области измерения и получение эхо-сигнала третьего ультразвукового сигнала, чтобы определить положение области измерения, при этом R составляет положительное целое число.
5. Устройство для измерения эластичности ткани, при этом устройство для измерения эластичности ткани содержит компьютер управления и зонд измерения эластичности;
зонд измерения эластичности подает первый ультразвуковой сигнал в ткань в области измерения; компьютер управления выполняет ультразвуковое сканирование посредством управления N элементами ультразвуковой матрицы на зонде измерения эластичности для образования по меньшей мере одной линии изображения первого ультразвукового сигнала, при этом N составляет положительное целое число;
компьютер управления отслеживает по меньшей мере одну линию изображения первого ультразвукового сигнала; а также отслеживает значения измерений по меньшей мере одной линии изображения;
компьютер управления определяет, в соответствии с линией изображения в по меньшей мере двух точках, состояние движения каждой линии изображения;
причем компьютер управления определяет значение параметра движения каждой линии из по меньшей мере одной линии изображения в соответствии со значением измерения в по меньшей мере двух временных точках, и определяет значение параметра движения в разных положениях ткани в области измерения в соответствии со значением параметра движения каждой линии изображения, и
компьютер управления выбирает положение с учетом линии изображения с состоянием движения, удовлетворяющим заданному условию, и зонд измерения эластичности выполняет измерение эластичности ткани.
6. Устройство по п. 5, при этом состояние движения характеризуется множеством параметров движения, и, когда множество параметров движения удовлетворяют соответствующим заданным условиям, определяют, что состояние движения удовлетворяет заданному условию.
7. Устройство по п. 5, при этом компьютер управления передает сдвиговые волны в ткань в области измерения; компьютер управления управляет M элементами ультразвуковой матрицы на зонде измерения эластичности для подачи второго ультразвукового сигнала в выбранное положение и получения эхо-сигнала второго ультразвукового сигнала; и обрабатывает эхо-сигнал второго ультразвукового сигнала, при этом M составляет положительное целое число.
8. Устройство по п. 5, при этом прежде, чем зонд измерения эластичности подает первый ультразвуковой сигнал в ткань в области измерения, компьютер управления управляет R элементами ультразвуковой матрицы на зонде измерения эластичности для подачи третьего ультразвукового сигнала в ткань в области измерения и получения эхо-сигнала третьего ультразвукового сигнала, чтобы определить положение области измерения, при этом R составляет положительное целое число.
| WO 2019072552 A1, 18.04.2019 | |||
| US 20170042511 A1, 16.02.2017 | |||
| CN 106510766 A, 22.03.2017 | |||
| УСТРОЙСТВО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С ЛИНЕЙНЫМ СКАНИРОВАНИЕМ И СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С ЛИНЕЙНЫМ СКАНИРОВАНИЕМ | 2018 |
|
RU2690063C1 |

