Область техники, к которой относится изобретение
Настоящее изобретение относится к измерению поперечной волны и, более конкретно, к осуществлению этого посредством ультразвуковой виброметрии рассеяния поперечных волн (SDUV).
Уровень техники
Механические изменения в живых тканях коррелируют с патологическими изменениями. В отношении здоровой и патологической ткани, модуль упругого сдвига (жесткость) и вязкость могут значительно варьировать. С появлением разработки ультразвуковой визуализации эластичности за последнее десятилетие, многие клинические исследования показали, что вязкоупругие свойства тканей предоставляют врачам полезную информацию для более качественной диагностики злокачественных опухолей и оценки терапии.
Ультразвуковая виброметрия рассеяния поперечных волн (SDUV) представляет собой способ, основанный на силе акустического излучения, которое измеряет упругость при сдвиге ткани и вязкость посредством описания рассеяния скорости поперечной волны, т.е. посредством частоты. Применение этого способа состоит в неинвазивном измерении жесткости печени для определения стадии фиброза и цирроза печени.
В исследованиях посредством ультразвука в целях медицинской визуализации часто используют продольные волны. В ткани организма ультразвук распространяется в форме волны. Фактически частицы на всем протяжении пути распространения совершают колебания на месте, назад и вперед, и колебание происходит в направлении распространения. Колебания создают сжатия и разрежения. В модели их представляют в виде пиков и впадин синусоиды. Передача энергии к мишени и обратно происходит посредством колебательных движений частиц.
В отличие от этого, ультразвуковая поперечная (или сдвиговая) волна отличается движением на месте вперед и назад, которое перпендикулярно направлению распространения. Колебание в одном направлении создает пики, а в другом направлении создает впадины.
Осуществление SDUV влечет за собой испускание серии сфокусированных толкающих импульсов продольных волн. Они представляют собой сигналы высокой интенсивности с узкой полосой, которые генерируют с частотой повторения (например) 100 Гц. После генерации нескольких таких импульсов, каждый латерально совпадает с одним и тем же направлением, они устанавливают поперечную волну, которая распространяется от фокуса и в направлении, перпендикулярном направлению толкающих импульсов. Глубину фокусировки выбирают так, чтобы поперечная волна проходила через интересующую область (ИО).
Продольную волну импульса слежения испускают в ИО для того, чтобы в точке дискретизации оценить амплитуду поперечной волны. Это измерение используют для оценки фазы поперечной волны в местоположении дискретизации.
Для дискретизации другого местоположения другой толкающий импульс испускают в тот же толкающий фокус, за которым в это местоположение следует импульс слежения. Этот второй цикл необходим, поскольку различие в фазе между двумя точками используют в определении эластичности и вязкости.
Присутствуют поперечные волны с частотами типично 100 Гц и гармониками (200 Гц, 300 Гц, 400 Гц), т.е. компонентами (или «монохроматическими поперечными волнами»), поскольку огибающая побуждающего импульса представляет собой прямоугольную волну. Оценки скорости при различных частотах используют в получении упругости при сдвиге и вязкости ткани.
Раскрытие изобретения
Недостатки известного уровня техники регистрации рассмотрены далее в настоящем документе.
Одна основная проблема, связанная с обнаружением индуцированных силой излучения поперечных волн, используя SDUV, состоит в относительно низкой амплитуде колебания. Осевое смещение составляет порядка 10 мкм. Следовательно, колебания амплитуды подвержены зашумлению. Электронный шум системы и движения пациента, такие как сердечные или дыхательные движения, вносят значительный шум в оценку смещения поперечной волны.
Кроме того, для обнаружения поперечных волн необходима быстрая визуализация. Следует регистрировать колебания частотой до 400 Гц, поскольку среда ослабляет поперечные волны с более высокой частотой. Таким образом, для безопасного превышения предела Найквиста, каждое пространственное местоположение следует дискретизовать при частоте более 1000 Гц, чтобы предотвратить наложение. Поскольку частота повторения импульсов слежения ограничена скоростью звука в ткани и глубиной ИО, это ограничивает число пространственных местоположений, которые можно дискретизовать, используя стандартные не многолинейные последовательности обнаружения.
Использование многолинейного формирователя диаграммы направленности, как предложено далее в настоящем документе, допускает пространственную дискретизацию поля смещений с более высоким разрешением, и/или пространственную дискретизацию как в вертикальной, так и латеральной плоскости визуализации (при использовании двухмерных массивов против стандартных одномерных массивов). Поскольку из каждого импульса обнаружения получают больше информации, то повышена устойчивость измерений эластичности по SDUV. Следовательно, в качестве дополнительного преимущества, можно значительно уменьшить общее время, затраченное на процедуру. Это благоприятно с точки зрения удобства для пациента и снижения потенциального воздействия тепловых эффектов от повторной доставки толчков в точку возбуждения. Кроме того, увеличенный ритм регистрации радиочастотных (РЧ) данных предоставляет возможность использования других способов визуализации/количественной оценки поперечных волн, которые требуют высокого пространственного разрешения и высокой скорости.
В одной версии настоящего изобретения ультразвуковую виброметрию рассеяния поперечных волн (SDUV) осуществляют посредством формирования, из одного импульса слежения, параллельно направленных принимающих линий для выполнения измерений монохроматической поперечной волны.
В качестве одного из аспектов, формирование осуществляют по меньшей мере по одному другому импульсу слежения с тем, чтобы совместить получаемые принимающие линии для увеличения глубины поля.
Более конкретно, в некоторых вариантах осуществления увеличение влечет объединение из числа совмещенных принимающих линий для создания по меньшей мере одной реконструированной A-линии.
Другие возможные связанные аспекты включают формирование из импульсов с разной синхронизацией по меньшей мере одного другого импульса слежения соответствующих множеств реконструированных A-линий, созданных посредством объединения.
В качестве конкретного варианта осуществления, выполнение измерений включает выполнение измерений амплитуды монохроматической поперечной волны.
Предложенное в настоящем документе можно реализовать в виде устройства для осуществления ультразвуковой виброметрии рассеяния поперечных волн (SDUV), выполненного с возможностью формирования, из одного импульса слежения, множества параллельно направленных принимающих линий для выполнения измерений монохроматической поперечной волны.
Такое устройство может отличаться тем, что импульс слежения и по меньшей мере один латерально смещенный импульс слежения фокусируют на единой глубине, устройство выполнено с возможностью, на основе данных эхо от импульсов, сфокусированных на этой глубине, реконструирования менее глубоко расположенного фокуса передачи.
Или в альтернативном, или дополнительном аспекте устройство выполнено с возможностью такого формирования по меньшей мере одного другого импульса слежения и с тем, чтобы совместить принимающие линии, и, кроме того, выполнено с возможностью интерполяции моментов генерации импульса при определении разности фаз для введения поправки на распространение волн между дискретными значениями.
В одной форме компьютерный программный продукт для осуществления ультразвуковой виброметрии рассеяния поперечных волн (SDUV) содержит машиночитаемый носитель, на котором реализована компьютерная программа, которая содержит инструкции, исполняемые посредством процессора, для формирования из одного импульса слежения параллельно направленных принимающих линий для выполнения измерений монохроматической поперечной волны.
Кроме того, в некоторых версиях осуществление ультразвуковой виброметрии рассеяния поперечных волн (SDUV) включает, по множеству местоположений посредством множества проходов по местоположениям, дискретизацию по чересстрочному паттерну для выполнения измерений монохроматической поперечной волны.
В конкретном варианте этих версий, местоположения, дискретизованные в одном из множества проходов, перемещаются с местоположениями, дискретизованными в следующем проходе из упомянутого множества проходов.
В качестве возможного аспекта, результаты дискретизации в заданном одном из местоположений по множеству проходов сравнивают с эталонной A-линией для определения смещения монохроматической поперечной волны в этом местоположении.
Аналогично, в некоторых аспектах устройство для осуществления ультразвуковой виброметрии рассеяния поперечных волн (SDUV) выполнено с возможностью, по множеству местоположений посредством множества проходов по местоположениям, дискретизации по чересстрочному паттерну для выполнения измерений монохроматической поперечной волны.
Предложенное в настоящем документе аналогичным образом может принять форму способа осуществления ультразвуковой виброметрии рассеяния поперечных волн (SDUV), который содержит выполнение измерений монохроматической поперечной волны и применение к измерениям банка фильтров, которые настроены на соответствующие возможные скорости волны, без необходимости определять разность между фазами волны в различных пространственных местоположениях.
В дополнительном аспекте, фильтр низких частот можно использовать при измерениях, чтобы снизить шум при подготовке к применению.
В еще одном аспекте фильтры в банке являются двухмерными, одно измерение представляет собой пространственное местоположение, а другое измерение представляет собой время.
В дополнительном аспекте, устройство для осуществления ультразвуковой виброметрии рассеяния поперечных волн (SDUV) выполнено с возможностью выполнения измерений монохроматической поперечной волны и применения к измерениям банка фильтров, которые настроены на соответствующие возможные скорости волны, все без необходимости определять разность между фазами волны в различных пространственных местоположениях.
Кроме того, в качестве дополнительных аспектов, описанные выше устройства можно реализовать в виде одной или более интегральных схем.
Подробности о новом с высоким пространственным разрешением способе дискретизации для SDUV более полно изложены ниже с помощью сопроводительных чертежей.
Краткое описание чертежей
На фиг. 1 представлено примерное схематическое изображение для двух последующих дискретных значений SDUV.
На фиг. 2 представлена временная диаграмма примера, представляющего последовательное SDUV отслеживание.
На фиг. 3 представлена блок-схема, соответствующая временной диаграмме на фиг. 2.
На фиг. 4 представлена схематическая диаграмма передачи-приема, которая иллюстрирует, в качестве примера, регистрацию дискретных значений SDUV с использованием ретроспективной динамической передачи (RDT), как реализовано в 16× многолинейном формирователе диаграммы направленности.
На фиг. 5 представлено схематическое изображение, которое в контексте RDT демонстрирует возможное размещение фокуса передачи обнаруживающего луча
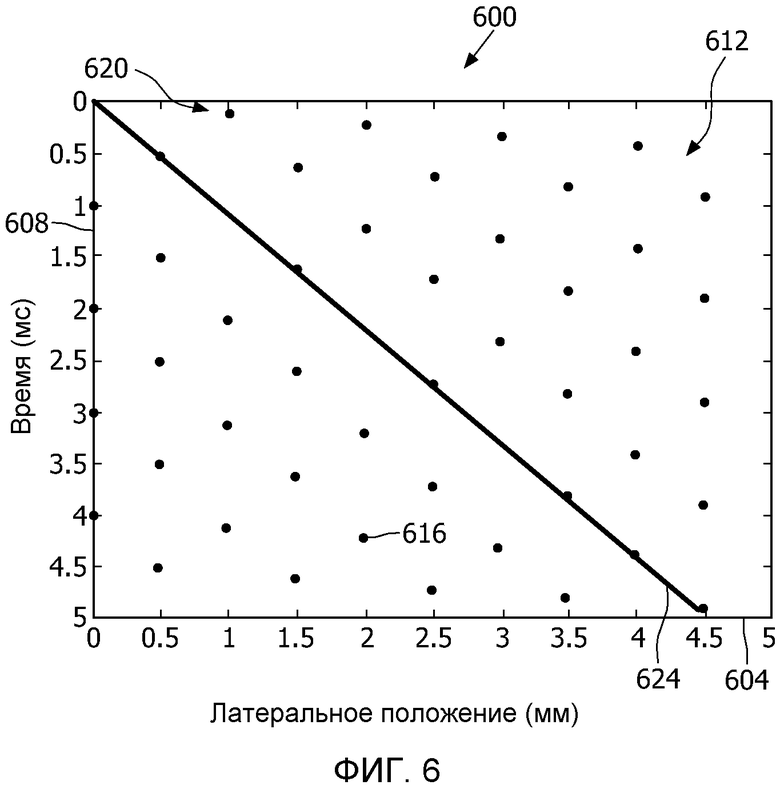
На фиг. 6 представлено графическое изображение примерной схемы чересстрочной дискретизации.
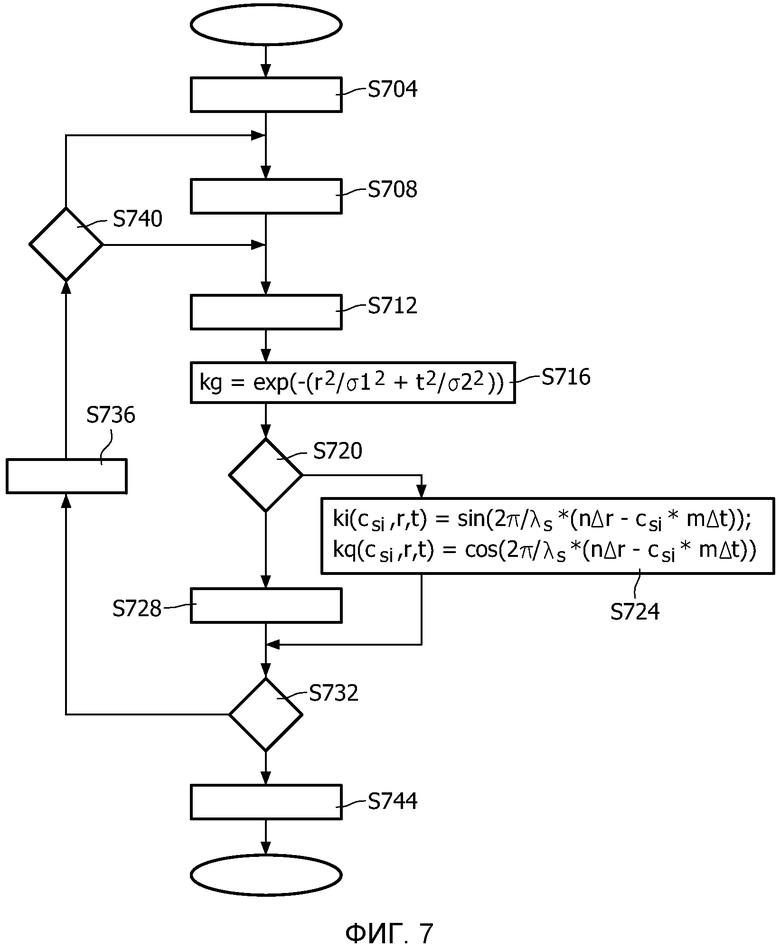
На фиг. 7 представлена блок-схема, изображающая конкретные варианты осуществления в качестве примеров того, как определить упругость при сдвиге и вязкость ткани.
Осуществление изобретения
Сначала приведено общее описание одной версии SDUV с более быстрой дискретизацией. Далее, в этом контексте, и начиная с фиг. 4, приведена дополнительная примерная разработка, связанная с более высокой пространственной дискретизацией.
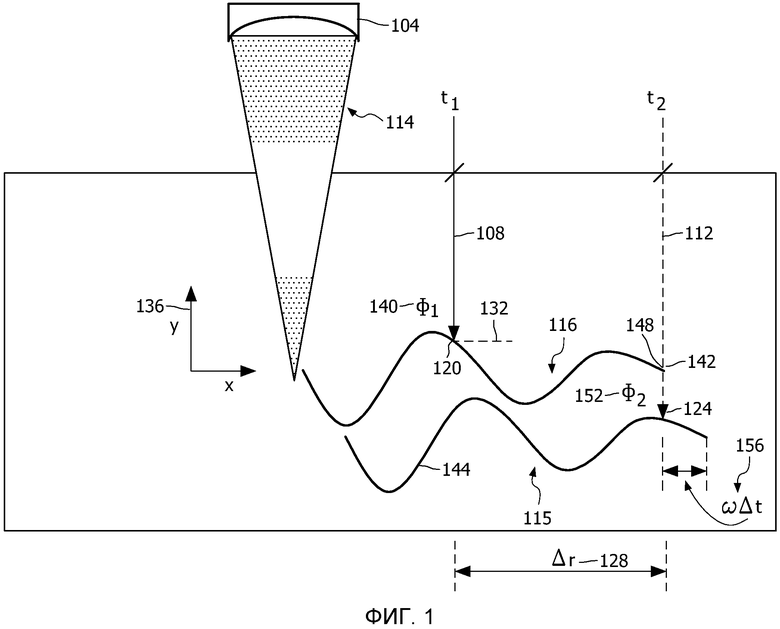
На фиг. 1 показано, в качестве иллюстративного и неограничивающего примера, отношение между двумя последующими дискретными значениями SDUV. Показан ультразвуковой толкающий зонд 104 вместе с первым и вторым импульсами 108, 112 слежения, испущенными в соответствующие моменты дискретизации t1, t2 посредством ультразвукового следящего зонда (не показано). Толкающий зонд 104 посылает серию сфокусированных толкающих импульсов (или «толчков») 114, чтобы установить поперечную волну 115, частотная составляющая которой (или «монохроматическая поперечная волна») представлена посредством первого пути 116. Ткань вибрирует вдоль направления y, а поперечная волна 115 распространяется вдоль направления x.
Можно использовать два отдельных зонда для толкания и слежения соответственно. Однако громоздкая конфигурация этого типа не практична для клинического применения.
Кроме того, в случае отдельных одноэлементных преобразователей, необходимо повторно генерировать побуждающие (толкающие) импульсы для того, чтобы измерить фазовую задержку поперечной волны при различных латеральных положениях, что ведет к повторному нагреванию ткани.
С другой стороны, если реализовать слежение с использованием массива преобразователей, то необходимость повторных толчков будет уменьшена в соответствии с предложением в настоящем документе.
Кроме того, один единственный массив преобразователей может выполнять обе функции толкания и слежения. Единственный массив преобразователей двойного назначения сделает систему более компактной и более легкой в управлении. Однако эта конфигурация требует поддержки дополнительного аппаратного и программного обеспечения, чтобы гарантировать возможность генерировать силу акустического излучения и визуализировать получаемую поперечную волну 115 посредством единственного преобразователя. Единственный преобразователь может представлять собой однорядный массив (одномерный преобразователь) или многорядный массив (1,75- или 2-мерный преобразователь), который предусматривает местоположения латерального и вертикального толчка и/или импульса слежения.
Улучшенная технология двухмерного массива позволит посылать импульсы слежения в трех измерениях; однако следующее обсуждение относится к слежению за движением ткани в аксиально-латеральной плоскости. Этот же подход применим к аксиально-вертикальной плоскости, без потери общности.
Импульсы 108, 112 слежения нацелены на соответствующие местоположения 120, 124, пространственно разделенные расстоянием 128 между местоположениями или Δr. Расстояние 128 типично находится в миллиметровом диапазоне, поскольку происходит ослабление поперечной волны 115 с увеличением расстояния распространения. Измеряют амплитуду (или смещение) 132, как представлено на оси y 136. На основе амплитуды 132 можно получить фазу 140 для Φ1 в местоположении 120 при условии, что соблюден предел Найквиста относительно частоты дискретизации. Предел Найквиста можно соблюсти посредством достаточной частоты кадров, т.е. через местоположение 120 проходит множество дискретизаций с достаточной частотой.
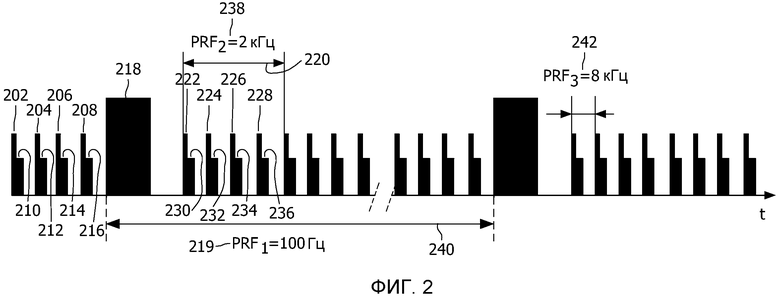
На фиг. 2 изображен один пример последовательного SDUV отслеживания. Перед тем, как какими-либо толкающими импульсами 114 возбуждать колебания в интересующей области (ИО), испускают эталонные импульсы 202, 204, 206, 208 слежения, нацеленные на соответствующие местоположения дискретизации x1, x2, x3, x4. Местоположения x1, x2, x3, x4 радиально центрованы относительно точки x0, т.е. в направлении распространения поперечной волны 115, которая должна быть создана посредством толкающих импульсов. За каждым из эталонных импульсов 202, 204, 206, 208 слежения следует соответствующее ему эхо 210, 212, 214, 216. Затем поперечную волну 115 устанавливают в местоположении x0, т.е. в месте точки возбуждения. Это осуществляют посредством начальной серии (не показано на фиг. 2) толкающих импульсов 218, которые генерируют с частотой толчков 219, которая типично может составлять приблизительно 100 Гц. Инициирующее начало последовательности слежения из толкающих импульсов 218 можно испускать после установления волны 115. Последовательно, управляемо, импульс за импульсом следует проход 220 импульсов 222, 224, 226, 228 слежения. Импульсы 222, 224, 226, 228 слежения нацеливают на соответствующие местоположения дискретизации x1, x2, x3, x4. За каждым импульсом 222, 224, 226, 228 следует соответствующее ему эхо 230, 232, 234, 236, из которых затем формируют пучок для соответствующей принимающей A-линии. Проход 220 испускают при частоте слежения того же местоположения 238, равной 2 кГц. Таким образом, за толчком 218 могут следовать 20 проходов (т.е. «кадров») 220. Также частота слежения того же местоположения 238, равная 2 кГц, допускает измерение фазы компонентов 116 с частотами приблизительно до 1 кГц, т.е. предела Найквиста. Каждый из импульсов 222, 224, 226, 228 слежения одновременно может выполнять функцию обеспечения измерения каждой из частотных составляющих, в рамках свойственных границ предела Найквиста.
Используют обычную визуализацию в B-режиме, т.е. импульсы 222, 224, 226, 228 слежения электронно фокусируют и направляют назад и вперед латерально в различных местоположениях x1, x2, x3, x4 между двумя смежными толкающими импульсами 218. Следовательно, последовательно формируют принимающие A-линии в различных местоположениях x1, x2, x3, x4.
Число передающих линий в пределах каждого кадра в B-режиме следует ограничивать так, чтобы PRF дискретизации (частота повторения импульсов) для поперечной волны 115 была достаточно высока. Как видно на фиг. 2, например, для каждого местоположения x1, x2, x3, x4, частота слежения того же местоположения 238 составляет 2 кГц (PRF2), тогда как частота передающей A-линии 242 составляет 8 кГц (PRF3). Это носит лишь иллюстративный характер. Если наивысшая измеренная гармоника составляет 400 Гц, это указывает на то, что импульсы обнаружения (латерально идентично в заданном направлении) следует генерировать с минимальной частотой, например 1000 Гц (допускает небольшой запас относительно Найквиста). В этом случае, PRF2 следует задавать равным 1 кГц. Следовательно, будет можно передавать лучи в 8 кГц/1 кГц = 8 местоположений.
Только одна последовательность 240 толчков/слежения нужна для получения всей SDUV информации, необходимой для оценки скорости поперечной волны. Более быстрая регистрация данных является ключевым требованием к улучшению способа SDUV относительно инструмента одноточечной «виртуальной биопсии» до возможной модальности визуализации в реальном времени. Также стоит отметить, что тепло, генерируемое в ткани, и преобразователь можно уменьшить, при этом сохраняя число латеральных местоположений x1, x2, x3, x4, …, наблюдаемое для слежения за поперечной волной. Более быстрая регистрация данных также может дополнительно уменьшить шум в оценке смещения поперечной волны, следовательно, в частности, избегая шума, длительного по времени, такого как дыхательные движения, которым в ином случае ткань может подвергаться на протяжении различных последовательностей 240 толчков/слежения.
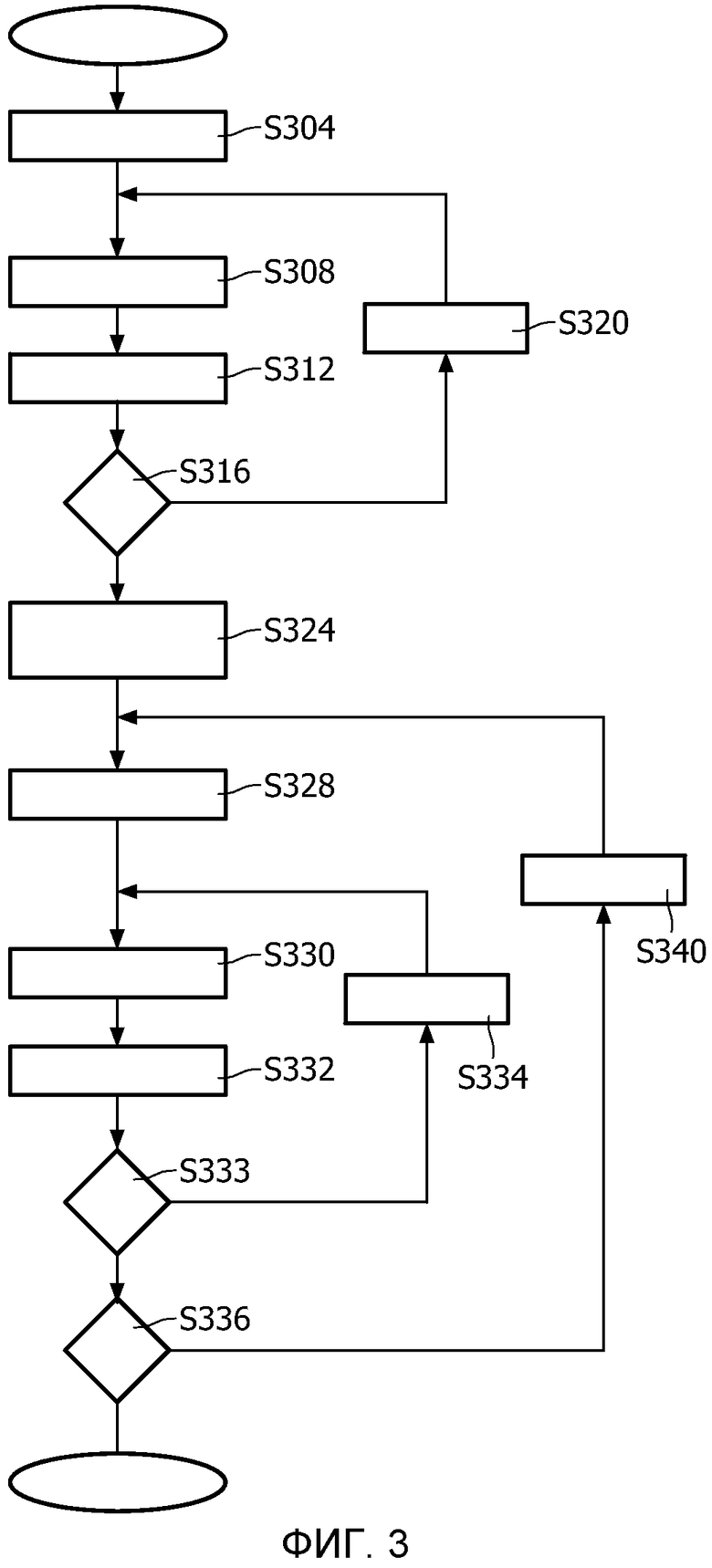
На фиг. 3 представлена блок-схема, соответствующая временной диаграмме на фиг. 2. Фокус устанавливают в первом местоположении x1 (этап S304). Испускают текущий эталонный импульс слежения 202 (этап S308). Следует его эхо 210 (этап S312). Если измерению подлежит большее число местоположений (т.е. x2, x3, x4) (этап S316), то фокус направляют в следующее местоположение (этап S320), и обработка возвращается к этапу S308 испускания эталонного импульса слежения в это следующее местоположение в качестве текущего местоположения. С другой стороны, если отсутствуют дополнительные местоположения, подлежащие измерению (этап S316), то последовательно генерируют толкающий импульс 218, чтобы установить поперечную волну 115 (этап S324). Затем фокус устанавливают в первое местоположение x1 (этап S328). Испускают текущий импульс слежения 222 (этап S330) и возвращается его эхо 230 (этап S332). Если испусканию подлежат дополнительные импульсы слежения (т.е. 224, 226, 228) в текущем проходе 220 (этап S333), то фокус устанавливают на соответствующее следующее местоположение (этап S334), и обработка возвращается к этапу S330 испускания импульса слежения в следующее местоположение в качестве текущего местоположения. В ином случае, если отсутствует следующий импульс слежения, подлежащий испусканию, выполняют запрос о том, нужно ли выполнить другой проход через местоположения x1, x2, x3, x4 (этап S336). Если следующий проход должен быть выполнен, то выполняют следующий проход в качестве текущего прохода (этап S340), и обработка возвращается к началу следующего прохода 220 на этапе S328. Однако, если не существует следующего прохода 220, который должен быть выполнен (в текущей последовательности 240 толчков/слежения), то дискретизацию завершают. Единственной последовательности 240 толчков/слежения достаточно в настоящем предложенном способе, чтобы обеспечить всю дискретизацию, необходимую для SDUV определения скорости поперечной волны и, в практических вариантах осуществления, для вычисления эластичности и вязкости ткани.
На фиг. 4 представлен один пример схемы 400 SDUV регистрации дискретных значений с использованием ретроспективной динамической передачи (RDT), как реализовано в 16× многолинейном формирователе диаграммы направленности, т.е. в формирователе диаграммы направленности, который формирует 16 принимающих линий из одного луча передачи (или «передачи» для краткости).
При использовании многолинейного формирователя диаграммы направленности SDUV дискретизация остается последовательной, но посредством группы пространственных местоположений. К каждой группе испускают луч передачи. Если ИО расположена на другой глубине, чем фокус луча передачи, то луч передачи будет шире, чем в фокусе и будет облучать звуком группу пространственных местоположений. Альтернативно, луч может быть слабо сфокусирован на той же глубине, что и ИО, при ширине, которая достаточна для облучения звуком группы пространственных местоположений.
Из эха луча передачи, созданного из одного импульса 404 слежения, 16× схема формирования диаграммы направленности формирует 16 параллельно направленных принимающих линий 411-426 для выполнения измерений монохроматической поперечной волны 116. Как показано с помощью диагонали, линии слежения субапертуры 427, первые восемь принимающих линий 411-418 находятся на одной стороне от центра луча передачи, а вторые восемь принимающих линий 419-426 расположены на другой стороне.
Все другие импульсы 428, 429, 430 слежения и первый импульс 404 слежения имеют различную синхронизацию. Если передающую A-линию (или «импульс слежения») PRF 242 задать равной 10 кГц, например, один импульс 404 слежения длится 100 мкс до следующего импульса 428 слежения. Через 100 мкс генерируют следующий импульс 429 и так далее.
Каждый импульс 404, 428, 429, 430 слежения формируют посредством соответствующей активной на данный момент субапертуры следящего зонда. Активная субапертура представляет собой поднабор преобразовательных элементов, которые в данный момент активны для передачи ультразвука. Таким образом, например, после генерации импульса 404 слежения происходит смещение активной в данный момент субапертуры (например, один или более элементов на одной стороне апертуры исключают и один или более элементов на другой стороне включают). Затем, когда генерируют следующий импульс 428 слежения, это происходит в смещенной субапертуре. Пространственное расстояние между смежными апертурами обозначают далее в настоящем документе как расстояние между передачами 434, которое в текущем примере составляет 0,5 мм. Фокальную точку импульса слежения между последовательными импульсами слежения также смещают на расстояние между передачами 434.
16 параллельно направленных принимающих линий 411-426 (т.е. динамически формируемые принимающие линии, которые пространственно параллельны) формируют по данным эха, принятым после передачи 404. Каждую принимающую линию 411-426 формируют посредством принимающей субапертуры. Принимающая субапертура представляет собой поднабор преобразовательных элементов, которые участвуют в заданной принимающей линии.
Пространственное расстояние между принимающими линиями 411-426 обозначают далее в настоящем документе как расстояние между приемами 438. В этом примере оно составляет 0,125 мм или одну четверть от 0,5 мм расстояния между передачами 434.
Использование расстояния между приемами 438, равного доле расстояния между передачами 434, допускает более плотную дискретизацию, как рассмотрено ниже более подробно.
Все полученные радиочастотные данные эха сохраняют во временном запоминающем устройстве. Полученные данные будут продолжать сохранять по мере того, как субапертура будет смещаться и в конечном счете примет свое конечное положение в массиве преобразователей, т.е. чтобы получить полный проход данных. Кроме того, данные будут сохранять проход за проходом.
Вследствие смещения субапертуры между генерацией первого импульса 404 слежения и следующего импульса 428 слежения, последние двенадцать принимающих линий 415-426 этого первого импульса пространственно совмещаются с первыми двенадцатью принимающими линиями этого следующего импульса, соответственно. Аналогичным образом, вследствие смещения субапертуры с каждым следующим импульсом слежения, последние двенадцать принимающих линий импульса 428 слежения совмещают с первыми двенадцатью принимающими линиями следующего импульса 429 слежения, и так далее.
К тому моменту, когда генерируют четвертый импульс 430 слежения, соответствующие принимающие линии всех четырех импульсов 404, 428, 429, 430 слежения совмещаются и могут быть объединены для формирования четырех реконструированных A-линий 441-444.
Первую реконструированную A-линию 441, например, формируют из первой принимающей линии 423, объединенной с тремя соответствующими принимающими линиями непосредственно следующих импульсов 428-430 слежения. Объединение происходит в соответствии с ретроспективной динамической передачей (RDT). Эффект RDT фокусирования можно анализировать, используя аппроксимацию виртуального преобразователя, предложенную авторами Passman и Ermert в 1996. См. C. Passmann & H. Ermert, “A 100-MHz ultrasound imaging system for dermatologic and ophthalmologic diagnostics”, IEEE Trans. Ultrasonics, Ferroelectrics and Frequency Control, т. 43, № 4, с. 545-52 (1996). Этот способ дополнительно рассмотрен в принадлежащей тому же правообладателю публикации SU № 2009/0069693 Burcher et al, озаглавленной “Retrospective Dynamic Transmit Focusing for Spatial Compounding” (далее в настоящем документе «публикация 693»). Раскрытия обеих публикаций таким образом включены в настоящий документ путем ссылки в полном объеме.
Первая реконструированная A-линия 441 предназначена для измерения поперечной волны 115 в пространственном местоположении 451. Аналогичным образом, непосредственно следующие реконструированные A-линии 442-444, которые смещены латерально относительно первой реконструированной A-линии 441, предназначены для измерения поперечной волны 115 в соответствующих пространственных местоположениях 452-454.
Несмотря на то, что здесь можно объединять четыре принимающие линии в одну реконструированную A-линию, можно объединять меньшее число принимающих линий. Число фактически объединяемых зависит от глубины ИО и их результирующего покрытия облучением звуком посредством импульса слежения. К тому же текущий пример не является ограничивающим. Таким образом, смещение апертуры может происходить в такой степени, что можно объединять большее или меньшее число принимающих линий для формирования реконструированной A-линии.
Посредством объединения увеличивают глубину поля (DOF), область, в пределах которой луч передачи хорошо фокусируется, и отношение сигнала к шуму (SNR). При сравнении реконструированной A-линии 441 с любой из принимающих A-линий, из которых ее реконструируют, увеличено расстояние, в пределах которого ее пространственное разрешение эффективно, за счет более высокой DOF, обеспеченной посредством RDT.
Реконструирование A-линий на основе потенциально четырех принимающих линий начинается с первых четырех реконструированных A-линий 441-444, и возобновляется с каждым новым импульсом слежения. Таким образом, следующий импульс слежения допускает формирование четырех новых реконструированных A-линий в соответствующих пространственных местоположениях. Аналогичным образом, для остальной части кадра, каждый следующий импульс слежения ведет к формированию соответствующего множества реконструированных A-линий, в текущем примере это множество состоит из четырех реконструированных A-линий.
Следовательно, поперечную волну 115 дискретизуют с высоким разрешением, без снижения ритма, в котором испускают импульсы слежения.
Следует отметить, что возможны не-RDT варианты осуществления, где они принимают местоположения фокусов, которые не совмещаются со смещением, а только примыкают друг к другу. Поперечная волна 115 все еще остается дискретизованной с высоким разрешением без снижения ритма испускания импульсов слежения. Число параллельно направленных принимающих линий на один импульс слежения может быть равно четырем, например, два на одной стороне следящего луча и два на другой стороне.
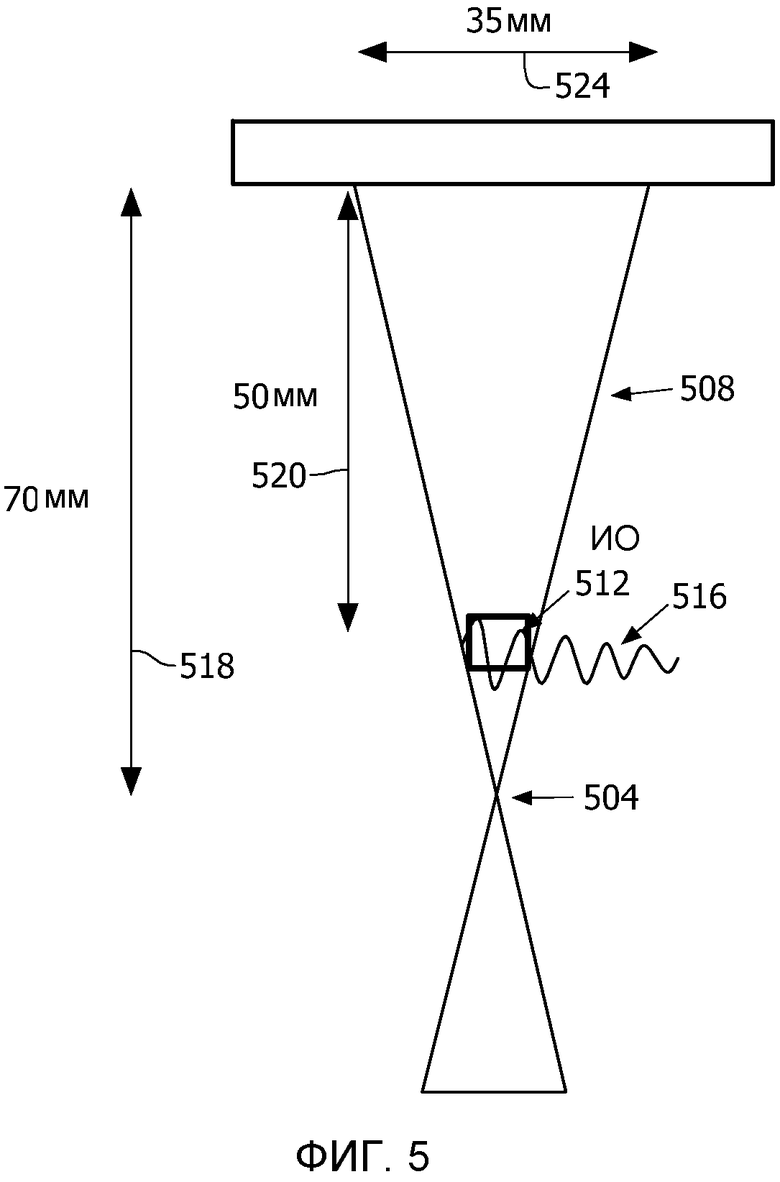
На фиг. 5 в контексте RDT показано возможное положение фокуса 504 обнаруживающего луча 508, сформированного посредством импульса 404 слежения. Интересующая область (ИО) 512, как обозначено прямоугольной рамкой, расположена там, где присутствует поперечная волна 516. Для того чтобы гарантировать, что облечение звуком посредством обнаруживающего луча 508 совмещает местоположения, подлежащие дискретизации посредством принимающих линий, подлежащих получению, будет полезным поместить фокус 504 глубоко в ИО 512. Физическое положение фокуса, показанное на фиг. 5, находится на общей глубине 518 70 мм для лучей передачи, облучающих звуком заданную точку в ИО и, следовательно, подлежащих RDT-объединению. Несмотря на то, что обнаруживающий луч 508 является широким на глубине 520 в ИО 512, RDT реконструированный обнаруживающий луч будет узким на этой глубине - будет иметь ту же ширину, что и (физический) фокус 504. В действительности и в качестве примера, среди начального по времени импульса 404 слежения и по меньшей мере одного латерально смещенного импульса 428-430 слежения, формирующего луч передачи, подлежащий RDT-объединению с таковым начального по времени импульсом слежения, по меньшей мере некоторые фокусируются на общей глубине 518. Менее глубоко расположенный фокус передачи на глубине 520 реконструируют на основе данных эхо от таковых импульсов 404, 428, 429, 430, сфокусированных на общей глубине 518.
Также это позволяет использовать передающую апертуру 524 большего размера, которая может увеличить общую энергию, которую можно передавать в обнаруживающем луче 508. Большее количество энергии обеспечивает более высокую чувствительность для минутных смещений 132 волновой амплитуды порядка приблизительно 10 мкм.
Альтернативно, фокус 504 обнаруживающего луча 508 можно поместить близко к ИО 512.
При применении RDT к SDUV существуют дополнительные учитываемые факторы.
Во-первых, RDT предполагает, что ткань не двигается между эпизодами передачи. Если происходит смещение, то оно будет снижать согласованность между объединенными лучами передачи и вести к аннулированию сигнала. Следовательно, по-видимому, это не совместимо с SDUV, поскольку происходит смещение ткани посредством поперечной волны. Однако на практике смещения 132 обладают такой малой величиной (типично < 10 мкм), что она представляет собой малую долю от длины волны импульса слежения (например, 300 мкм при 5 МГц). Следовательно, смещения 132 поперечной волны не будут вызывать какую-либо значимую потерю согласованности во время реконструирования передачи.
Во-вторых, даже с использованием немноголинейных последовательностей 220, поскольку лучи в различных латеральных местоположениях x1, x2, x3, x4 генерируют последовательно, оценки смещения в различных латеральных местоположениях дискретизируют в различные моменты t1, t2...
Вновь, как показано на фиг. 1, и приняв, например, немноголинейную последовательность, для простоты демонстрации, если моменты дискретизации t1, t2 являются одновременными, возвращающиеся данные, т.е. данные эха, от импульса 112 слежения будут иметь предполагаемую фазу 142, соответствующую точке 148 дискретизации на первой форме волны 116.
Однако моменты дискретизации t1, t2 не являются одновременными, если импульсы слежения для этих двух местоположений 120, 124 генерируют последовательно. (Аналогичным образом, реконструированная A-линия следующая, в кадре, за реконструированной A-линией 444, будет представлять собой дискретное значение волны 115 в другой момент).
Фактически, к моменту t2 компонент поперечной волны 116 распространился вперед в виде формы волны, которая имеет частотную составляющую, представленную посредством второго пути 144.
Соответствующая дискретизированная фаза 152 в Φ2, на втором пути 144 отличается от фазы 140 для Φ1 на первом пути 116 на разность фаз ΔΦ=Φ2-Φ1.
На фиг. 1 видно, что ΔΦ составляет менее разности между фазами 140, 142, которую имели бы одновременные импульсы слежения.
Также на фиг. 1 видно, что ΔΦ меньше на коррекцию фазы на основе задержки между дискретными значениями 156 ωΔt, «ω» обозначает угловую частоту монохроматической поперечной волны 116, «Δt» обозначает задержку между получением, в соответствующие моменты дискретизации t1, t2, двух дискретных значений.
Еще это представляет собой разность между фазами 140, 142, которые наряду с ω и Δr определяют скорость распространения частотной составляющей поперечной волны 116.
Эту разность вычисляют посредством прибавления к разности фаз ΔΦ коррекции фазы на основе задержки между дискретными значениями 156 ωΔt.
Скорость монохроматической поперечной волны 116 задают следующей формулой
cs(ω)=ωΔr/(Δφ+ωΔt).
Вывод формулы 1 представляет собой следующее:
cs(ω)=λf, где cs представляет собой скорость распространения, λ представляет собой длину волны, «ω» обозначает угловую частоту монохроматической поперечной волны 116, а f представляет собой частоту волны.
Также ω=2πf, и Δr=λΔΦ/2π, где ΔΦ обозначает разность фаз, для данного момента, между двумя дискретными значениями, полученными одновременно.
Все параметры предполагают положительными.
Подстановка значений дает cs(ω)=ωΔr/Δφ.
Чтобы учесть задержку между дискретными значениями для двух дискретных значений с другой синхронизацией, полученных в моменты t1, t2, прибавляют коррекцию фазы на основе задержки между дискретными значениями 156 ωΔt к ΔΦ, чтобы получить формулу (1), как изложено выше в связи с фиг. 1.
Аналогичный феномен имеет место при использовании RDT последовательности, и его следует учитывать, когда получают информацию об амплитуде на основе A-линий, направленных по-разному и полученных в разные моменты, например, реконструированной A-линии 444 и реконструированной A-линии, полученной позже в кадре.
Чтобы учесть это в применении формулы 1, когда RDT объединяет лучи передачи для интерполяции промежуточных местоположений передачи (как раскрыто в публикации 693), момент дискретизации (а также местоположение дискретизации) интерполируют между лучами передачи. Другими словами, в случае моментов генерации импульсов и в случае местоположений передачи при генерации (например, тех, что вдоль линии слежения субапертуры 427 для лучей передачи, использованных в реконструировании), их интерполируют посредством тех же весов интерполяции RDT. Таким образом, Δt и Δr можно вычислить для подстановки в формулу (1).
Следует отметить, что формула (1) предполагает слежение, т.е. испускание импульсов слежения в (радиальном) направлении наружу от распространения поперечной волны. Если слежение осуществляют в обратном направлении, знак «+» в знаменателе меняется на знак «-». Рассуждая аналогично, если направление слежения чередуется с проходами 220, вычисление ΔΦ для пары пространственных местоположений 120, 124 можно усреднить с использованием такого же вычисления, выполненного на основе примыкающего прохода, чтобы знаменатель представлял собой просто ΔΦavg.
Формула (1) также предполагает, что два дискретных значения различных местоположений получают в различные моменты.
В не-RDT, немноголинейном примере, проиллюстрированном на фиг. 2 и 3, дискретные значения различных местоположений получают в различные моменты.
В не-RDT, многолинейном варианте осуществления принимающие линии заданного луча передачи не обладают другой синхронизацией. Поэтому в знаменателе формулы (1) опускают коррекцию фазы на основе задержки между дискретными значениями 156 ωΔt для тех вычислений скорости, если требуется, на основе принимающих линий заданного луча передачи. Однако в ином случае формулу (1) используют как есть.
В контексте RDT, реконструированная A-линия, следующая в кадре за реконструированное A-линией 444, будет представлять собой дискретное значение волны 115 в другой момент. Аналогичным образом, реконструированные A-линии 441-444, как правило, будут обладать различными моментами дискретизации, последнее основано на соответствующих интерполяциях моментов генерации лучей передачи. В каждой из этих соответствующих интерполяций используют различные веса интерполяции, которые пропорциональны напряженности передающего поля в целевом местоположении вдоль A-линии, подлежащей реконструкции. Тогда типично первая реконструированная A-линия 441 будет иметь более ранний момент дискретизации, чем непосредственно следующая реконструированная A-линия 442 в целях расчета скорости. Поэтому формулу (1) можно применять как есть.
На фиг. 6 приведен пример схемы 600 чересстрочной дискретизации. Она не основана на многолинейном формирователе диаграммы направленности или RDT. Следовательно, для простоты она описана для базового формирователя диаграммы направленности, способного формировать только одну принимающую линию на один импульс 222 слежения. Ось x 604 представляет собой латеральное положение, в миллиметрах, от первого местоположения дискретизации x1. Ось y 608 представляет собой время, прошедшее с первого импульса 222 слежения. Представлено поле 612 движения измеренных смещений 616, величины которых не показаны. Наблюдения 616 приведены для нескольких проходов дискретизации по местоположениям дискретизации x1, x2, x3, x4,....
Авторы настоящего изобретения наблюдали, что желательно создавать схему дискретизации, в которой дискретные значения, которые ординально совпадают с соответствующим образом разнесенным паттерном (например, 1-е, 4-е, 7-е, 10-е...), «едут» на воле распространения по фазе на месте или приблизительно так. Таким образом, каждое соответствующее смещение 616 будет почти таким же, тем самым уменьшая артефакты дискретизации. Такое устройство, в частности, полезно, когда сталкиваются с высокой PRF и другими ограничениями реализации.
Как отмечено ранее, скорость дискретизации по времени ограничена максимальной частотой поперечных волн. Для хорошей дискретизации 400 Гц поперечной волны необходима частота дискретизации по времени по меньшей мере 1000 Гц. В свою очередь, общая частота дискретизации (по всем местоположениям) ограничена максимальной PRF 242, допустимой для определенной глубины визуализации. Максимальная PRF 242 может составлять, как указано выше в связи с примером, 10 кГц, что определяет возможность дискретизации по большей мере 10 пространственных местоположений без риска возникновения артефактов дискретизации, таких как наложение.
В итоге, желательно дискретизовать множество латеральных местоположений x1, x2, x3, x4 для увеличения числа измерений для устойчивости. Число латеральных положений ограничено максимальной PRF 242, как указано немного выше, хотя PRF должна быть достаточно высокой, чтобы допускать достаточно местоположений, подлежащих дискретизации без артефактов дискретизации.
Также полезно, чтобы латеральные местоположения были как можно ближе к точке возбуждения x0, чтобы избежать ослабления амплитуды поперечной волны, которое затрудняет измерение амплитуды, хотя первое латеральное местоположение x1 ограничено в его близости к точке возбуждения вследствие эффектов в ближнем поле. Близость между местоположениями xi, xi+1 ограничена, однако, другими инженерными факторами, требующими учета.
В схеме 600 чересстрочной дискретизации, в которой дискретизация в одном проходе является перемещающейся по местоположению с дискретизацией в следующем проходе, используют преимущество, во-первых, в виде того, факта, что поле движения, подлежащее измерению, высоко структурировано: оно состоит из поперечных волн 116 с ограниченным диапазоном скоростей.
Во-вторых, свойства двух осей 604, 608, относящихся к положению и времени, соответственно, таковы, что дискретизация последующих местоположений xi, xi+1, xi+2... подразумевает постоянную поступательную скорость импульса слежения. Это видно на фиг. 6 из первого ряда 620 наблюдений. Поскольку они подразумевают линию с постоянным наклоном, постоянная поступательная скорость импульса слежения является предполагаемой. В этом контексте и в отношении постоянного «поступательного движения» импульса слежения, если луч направляют не параллельно, «поступательное движение» можно считать происходящим между латеральными местоположениями xi, xi+1.
Однако упомянутые выше критерии конструирования требуют более высокой поступательной скорости, чем любая скорость монохроматической волны cs.
Тем не менее, более медленная постоянная поступательная скорость импульса слежения различима посредством ограничения изучения до дискретизации двух последующих местоположений xi, xi+1 посредством раздельных проходов 220. Это проиллюстрировано посредством наклонной линии 624, которая отличается тем, что дискретные значения, представляющие интерес, в двух местоположениях xi, xi+1 относятся к следующим друг за другом проходам 220.
Аналогичный феномен паттернов с более высокой и более низкой скоростью существует для не чересстрочного поля движения, т.е. поля, в котором каждый проход 220 следующие друг за другом местоположения xi, xi+1 дискретизуют без пропуска местоположений.
Однако чередование дискретизации представляет собой инструмент, посредством которого создают больше различных постоянных скоростей поступательного движения импульсов слежения, тем самым увеличивая возможность достижения совпадения (или близкого совпадения, как видно по линии 624) со скоростью целевой поперечной волны 116. Потребность в таком способе возникает по причине трудности манипулирования параметрами иным образом для изменения поступательной скорости, с учетом рассмотренных выше конструктивных ограничений. Особенно примечательно чередование результатов дискретизации в то же количество дискретных значений. Также это не оказывает нежелательного влияния на PRF 242 импульса слежения, которая остается постоянной.
Как видно на фиг. 6, поле 612 движения можно сегментировать на линии наблюдения, параллельные центральной наклонной линии 624.
Последующее уменьшение артефактов дискретизации может служить для уменьшения любых возможных побочных эффектов пространственной дискретизации с более высоким разрешением.
На фиг. 7 представлены конкретные варианты осуществления в качестве примеров того, как определить упругость при сдвиге и вязкость ткани. Первый компонент 116, например основная гармоника поперечной волны 115, выбирают в качестве текущего компонента (этап S704).
РЧ данные эха, которые в контексте RDT состоят из начальных по времени реконструированных A-линий 441-444, одни следуют друг за другом в кадре, а другие в других кадрах, получают, например, в соответствии со схемой 400 многолинейной регистрации дискретных значений (этап S708). Для каждого пространственного местоположения 451-454... каждую реконструированную A-линию в этом местоположении сравнивают с соответствующей реконструированной эталонной A-линией для определения смещения 132 компонента 116 текущей волны в этом местоположении. Для вычисления смещений 132 можно использовать множество известных подходов, таких как перекрестная корреляция или допплеровский подход.
Аналогичным образом, в не-RDT многолинейном и немноголинейном контекстах сравнивают одинаково расположенные дискретные значения (этап S712).
По причине дискретизации с более высоким разрешением в соответствии со способами, предложенными в настоящем документе, необязательно, в некоторых вариантах осуществления применяют фильтр низких частот (LPF) к измерениям 132 для снижении шума в измерениях. LPF может представлять собой двухмерный фильтр, действующий в измерениях местоположения и времени 604, 608. Пример такого фильтра будет являться анизотропным фильтром, таким как гауссово ядро:
kg=exp(-(r2/σ1 2+t2/σ2 2)),
где «r» обозначает местоположение, «t» обозначает время, а σ1 и σ2 контролируют размер фильтра в пространственном и временном измерениях, соответственно.
Если поле 612 движения состоит из одной поперечной волны 116, то контур на поле движения с постоянным смещением (т.е. поскольку чересстрочная схема 600 выстроена по соответствующим расстояниям между дискретными значениями на осях 604, 608, чтобы приводить к наклонной линии 624 по существу постоянного смещения 616) представляет собой прямую линию, которая наклоняется вниз и вправо и наклон которой или «градиент» определяется скоростью поперечной волны 116.
Поле 612 движения можно представить посредством двухмерной матрицы смещений 616, одно измерение представляет собой местоположение, а другое представляет собой время. Аналогичным образом, выражение в правой части формулы (1) оценивают для создания другой двухмерной матрицы, эти две матрицы сворачивают для уменьшения шума в измерениях 616.
Альтернативный фильтр представляет собой управляемый фильтр:
ks=exp(-(u2/σ3 2+v2/σ4 2)),
u=r+cs×t
v=r-cs×t,
где cs представляет собой угол фильтра (который отражает скорость), «u» - это в направлении, совмещенном с контурами волн, распространяющихся вперед со скоростью cs, и «v» - это в обратном направлении, совмещенном с контурами гипотетических волн, которые можно представить распространяющимися назад, т.е. в направлении точки возбуждения x0 со скоростью cs. Параметры калибровки σ3, σ4 контролируют размер фильтра в двух направлениях: u и v. Типично, σ3 больше, чем σ4, чтобы в направлении v применить большее сглаживание, чем в направлении u.
Если поле 612 движения состоит из одной поперечной волны 116, распространяющейся вперед со скоростью cs, то линии постоянной v будут лежать вдоль контуров на поле движения с постоянным смещением. Ядро фильтра ks в формуле (3) будут совмещать с полем 612 движения. В этом контексте угол фильтра задан скоростью поперечной волны 116 a priori. Необязательно, угол фильтра можно корректировать итеративно, используя текущую оценку скорости поперечной волны.
Свертывание ядра ks с измерениями 132 будет сглаживать больше в параллельном направлении относительно контура, чем в перпендикулярном направлении. Следовательно, для данной степени уменьшения шума он будет склонен сохранять структуру поля 612 движения лучше, чем изотропный фильтр (этап S716).
Альтернативой определения разности между фазами поперечной волны 116 в различных пространственных местоположениях xi, xj, в соответствии с формулой (1), является применение банка двухмерных фильтров, каждый настроен на конкретную возможную скорость волны.
Если банк фильтров подлежит применению (этап S720), то используют множество фильтров, покрывающих ожидаемый диапазон скоростей волны. Поле 612 движения свертывают с использованием каждого фильтра (по очереди или параллельно). Фильтр с наибольшим результатом вычисления принимают в качестве лучшей оценки скорости волны. Процесс можно повторять, делая оценку более точной посредством настройки фильтров на более близко расположенный отбор скоростей волн вокруг текущей оценки.
В качестве примера, поле движения представляют в формуле
d(r,t)=d(nΔr, mΔt),
где «r» представляет собой латеральное положение, «t» представляет собой время регистрации, и «n» и «m» представляют собой индексы дискретных значений, Δr представляет собой латеральный интервал дискретизации и Δt представляет собой время между дискретными значениями смещения в том же латеральном положении.
Для простоты демонстрации поле движения в этом примере в качестве признака содержит регулярную эквидистантную сетку, в которой исходные значения «t» (как и «r») в неявном виде исходно равны нулю. Тогда это соответствует дискретизации по не чересстрочному паттерну, а не по схеме 600 чересстрочной дискретизации. Однако этот пример можно адаптировать к схеме чересстрочной дискретизации посредством соответствующей модификации формулы (4), приведенной выше, и формул (5) и (6), приведенных ниже.
Продолжая этот пример, фильтр, который соответствует скорости волны csi, имеет
синфазное ядро:
ki(csi,r,t)=sin(2π/λs*(nΔr-csi*mΔt));
и квадратурное ядро:
kq(csi,r,t)=cos(2π/λs*(nΔr-csi*mΔt)).
Здесь λs представляет собой длину волны поперечной волны 116.
Результат вычисления фильтра задан формулой
y(csi)=(∑r,td(r,t)×ki(csi,r,t))2+(∑r,td(r,t)×kq(csi,r,t))2. формула (7)
Оценку csi a priori используют в формулах (5) и (6) для получения ядер первого фильтра. Затем ядра применяют к формуле (7), чтобы получить первый результат вычисления. Другие фильтры в банке генерируют посредством изменения значения csi в формулах (5) и (6) и повторного вычисления y(csi) в формуле (7). Скорость поперечной волны 116 задают посредством значения csi, для которого y(csi) имеет максимальное значение.
Улучшенные результаты можно получить посредством применения финитной функции к ядру. Это уменьшает смещение, вызванное усечением, возникающим в результате ограниченных размеров ядер и данных дискретизации (этап S724).
Снова обращаясь к этапу S720, если вместо банка фильтров следует выполнить вычисление скорости волны на основе разности фаз, то получают входные параметры. В частности, для смещений 132 определяют фазы Φ. Это можно выполнить посредством реконструирования Найквиста на основе смещений 132, наблюдаемых в заданном пространственном местоположении 451, 452, 453, 454, ..., и это осуществляют для каждого из различных пространственных местоположений. Разности фаз ΔΦ=Φ2-Φ1 вычисляют попарно для оценки разности фаз ΔΦ для подстановки в формулу (1). Эти вычисления разностей фаз осуществляют для соответствующих дискретных значений, полученных в различные моменты, например, как в случае первой по времени реконструированной A-линии 444 и любой следующей в кадре. Вычисленные разности фаз ΔΦ для дискретных данных с другой синхронизацией корректируют, используя коррекцию фазы на основе задержки между дискретными значениями 156 ωΔt, соответственно. По меньшей мере, некоторые выбранные пары могут быть относительно удалены в пространстве, чтобы улучшить точность вычислений. Анализ способом наименьших квадратов можно использовать для разностей фаз (скорректированных или нескорректированных, в зависимости от случая) и соответствующих им расстояний между местоположениями 128 Δr. Затем формулу (1) (с коррекцией 156 или без нее, в зависимости от случая) применяют для оценки скорости компонента 116 текущей волны (этап S728).
Двигаясь по любому пути (т.е. через этап S724 или S728), если компонент текущей волны не является последним подлежащим определению скорости (этап S732), то следующий компонент делают текущим компонентом (этап S736).
Если те же РЧ данные, использованные в определении скорости волны для предыдущего компонента, можно использовать для текущего компонента, поскольку, например, импульс слежения PRF 242 был достаточным для высшей гармоники (этап S740), обработка возвращается к этапу S712. В ином случае, если для текущего компонента следует выполнить дополнительную регистрацию, то вместо этого обработка возвращается на этап S708.
Если вместо этого, на этапе S732 компонент текущей волны является последним, подлежащим определению скорости, то применяют модель Фойгта, которая хорошо известна в данной области, для определения упругости при сдвиге и вязкость (этап S744).
Ультразвуковую виброметрию рассеяния поперечных волн (SDUV) реализуют в некоторых вариантах осуществления для формирования параллельно направленных принимающих линий из одного импульса слежения для выполнения измерений монохроматической поперечной волны. В некоторых вариантах осуществления дискретизацию по пространственным местоположениям осуществляют посредством проходов по местоположениям по чересстрочному паттерну для выполнения измерений волны. В некоторых вариантах осуществления выполняют измерения волны, и к измерениям применяют банк фильтров, которые настроены на соответствующие возможные скорости волны, все без необходимости определять разность между фазами волны в различных пространственных местоположениях.
Извлекая больше информации из каждого сгенерированного импульса слежения, способ и устройство, как предложено в настоящем документе, обеспечивают более полную дискретизацию поля смещений поперечной волны. Следовательно, это дает возможность более надежной оценки скорости поперечной волны и эластических свойств среды.
Предложенные в настоящем документе способы можно реализовать в программном обеспечении или, например, в промышленном изделии, включая устройство, которое можно реализовать в виде одной или более интегральных схем.
Вариант осуществления, в котором используют RDT, можно реализовать, например, в виде одного формирователя диаграммы направленности, такого как 16× или 32× многолинейный формирователь диаграммы направленности, лишь нужно добавить аппаратное обеспечение для буферизации и объединения совмещающихся принимающих линий.
Следует отметить, что упомянутые выше варианты осуществления иллюстрируют, а не ограничивают изобретение, и что специалисты в данной области способны сконструировать множество альтернативных вариантов осуществления, не отступая от объема приложенной формулы изобретения. Например, описанные в настоящем документе способы можно реализовать в любой из множества различных геометрий сканирования (линейная, фазированная или криволинейная). В формуле изобретения любые ссылочные позиции, помещенные в скобках, не следует толковать в качестве ограничения пункта формулы изобретения. Использование глагола «содержать» и его спряжений не исключает присутствие элементов или этапов, отличных от тех, что указаны в пункте формулы изобретения. Формы единственного числа определенного элемента не исключают присутствие множества таких элементов. Изобретение можно реализовать посредством аппаратного обеспечения, содержащего некоторые отдельные элементы, и посредством надлежащим образом запрограммированного компьютера, который имеет машиночитаемый носитель. Сам по себе тот факт, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения не указывает на то, что сочетание этих мер нельзя использовать с пользой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОЦЕНКА СКОРОСТИ ПОПЕРЕЧНОЙ ВОЛНЫ С ИСПОЛЬЗОВАНИЕМ ЦЕНТРА МАСС | 2011 |
|
RU2576338C2 |
| ПОСЛЕДОВАТЕЛЬНОСТИ РАСПРОСТРАНЕНИЯ/ОТСЛЕЖИВАНИЯ ДЛЯ ВИБРОМЕТРИИ ДИСПЕРСИОННЫХ ПОПЕРЕЧНЫХ ВОЛН | 2010 |
|
RU2559910C2 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ С ИСПОЛЬЗОВАНИЕМ СДВИГОВОЙ ВОЛНЫ | 2016 |
|
RU2641067C1 |
| ИНТЕРВЕНЦИОННАЯ МР-ТОМОГРАФИЯ С КОМПЕНСАЦИЕЙ ДВИЖЕНИЯ | 2010 |
|
RU2580189C2 |
| СИЛОВОЕ ВОЗБУЖДЕНИЕ УЛЬТРАЗВУКОВОГО АКУСТИЧЕСКОГО ИЗЛУЧЕНИЯ ДЛЯ УЛЬТРАЗВУКОВОГО ИЗМЕРЕНИЯ СВОЙСТВ МАТЕРИАЛА И ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2576244C2 |
| СИСТЕМА И СПОСОБ АДАПТИВНОЙ АБЛЯЦИИ И ТЕРАПИИ НА ОСНОВАНИИ ЭЛАСТОГРАФИЧЕСКОГО МОНИТОРИНГА | 2016 |
|
RU2707037C2 |
| УЛЬТРАЗВУКОВАЯ ВИЗУАЛИЗАЦИЯ ВОЛН СДВИГА С ФОРМИРОВАНИЕМ СФОКУСИРОВАННЫХ ПУЧКОВ СКАНИРУЮЩИХ ЛИНИЙ | 2010 |
|
RU2552894C2 |
| ЗОНД С УЛЬТРАЗВУКОВЫМ МАТРИЧНЫМ ПРЕОБРАЗОВАТЕЛЕМ ДЛЯ ВИЗУАЛИЗАЦИИ СДВИГОВЫХ ВОЛН | 2016 |
|
RU2715598C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ В РЕАЛЬНОМ ВРЕМЕНИ | 2017 |
|
RU2719024C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ВОЛНОВОГО ФРОНТА НА ОСНОВЕ СВЕТОВОГО ПОЛЯ | 2022 |
|
RU2808933C1 |
Изобретение относится к медицинской технике, а именно к средствам ультразвуковой виброметрии рассеяния поперечных волн (SDUV). Способ содержит этапы, на которых устанавливают поперечную волну, которая содержит монохроматический компонент поперечной волны, и формируют множество параллельно направленных принимающих линий из одного импульса слежения для выполнения измерений монохроматического компонента поперечной волны, причем параллельно направленные принимающие линии сформированы формирователем диаграммы направленности по данным эха, принятым из целевых местоположений и созданным посредством передачи одного импульса слежения, и содержат динамически сформированные принимающие линии, которые являются пространственно параллельными. Устройство для осуществления способа содержит средство для установления поперечной волны, формирователь диаграммы направленности и снабжено энергонезависимым машиночитаемым носителем. Использование изобретения позволяет повысить разрешение поля смещений и снизить потенциальное воздействие тепловых эффектов. 3 н. и 7 з.п. ф-лы, 7 ил.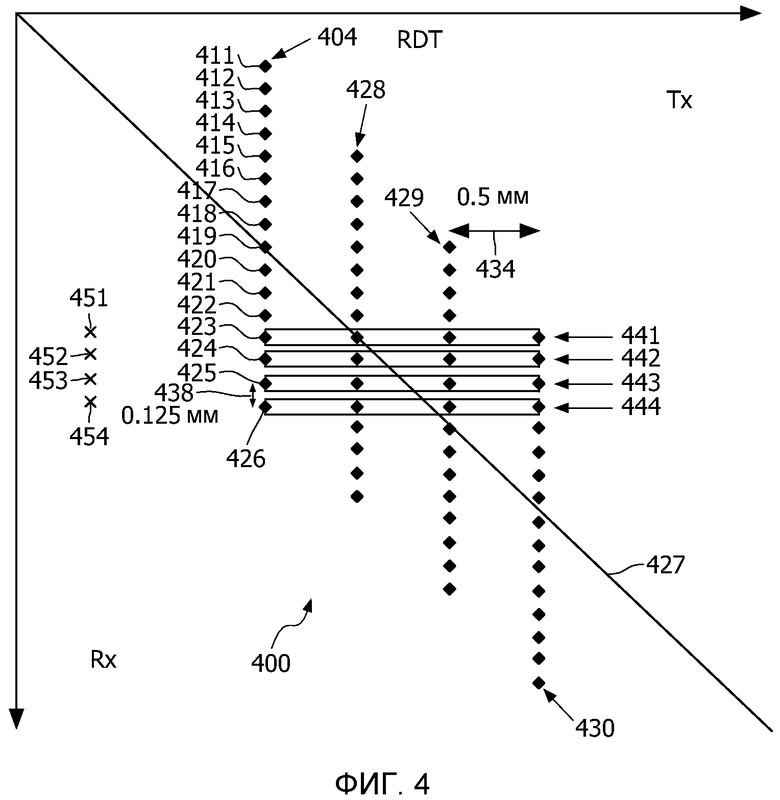
1. Способ осуществления ультразвуковой виброметрии рассеяния поперечных волн (SDUV), содержащий этапы, на которых:
устанавливают поперечную волну, которая содержит монохроматический компонент поперечной волны, и
формируют множество параллельно направленных принимающих линий (411-426) из одного импульса (404) слежения для выполнения измерений монохроматического компонента (116) поперечной волны, причем параллельно направленные принимающие линии (i) сформированы формирователем диаграммы направленности по данным эха, принятым из целевых местоположений и созданным посредством передачи одного импульса слежения, и (ii) содержат динамически сформированные принимающие линии, которые являются пространственно параллельными.
2. Способ по п. 1, дополнительно содержащий этапы, на которых:
выполняют упомянутое формирование из по меньшей мере одного другого импульса слежения с тем, чтобы совместить некоторые линии (423-426) из соответствующего получаемого множества параллельно направленных принимающих линий для увеличения глубины поля измерения.
3. Способ по п. 2, в котором увеличение глубины поля измерения влечет объединение некоторых из числа совмещающихся параллельно направленных принимающих линий для создания по меньшей мере одной реконструированной А-линии (441-444).
4. Способ по п. 3, в котором по меньшей мере один другой импульс слежения содержит импульс слежения с другой синхронизацией, причем способ дополнительно содержит этап, на котором:
формируют из некоторых импульсов (428-430) с другой синхронизацией из упомянутого по меньшей мере одного другого импульса слежения соответствующие множества реконструированных А-линий, созданных посредством упомянутого объединения.
5. Способ по п. 1, в котором выполнение измерений содержит этап, на котором выполняют измерения амплитуды (132) упомянутого монохроматического компонента поперечной волны в соответствующих целевых местоположениях.
6. Устройство для осуществления ультразвуковой виброметрии рассеяния поперечных волн (SDUV), содержащее:
средство для установления поперечной волны, которая содержит монохроматический компонент поперечной волны, и
формирователь диаграммы направленности для формирования множества параллельно направленных принимающих линий из одного импульса слежения для выполнения измерений (132) монохроматического компонента поперечной волны, причем параллельно направленные принимающие линии (i) сформированы формирователем диаграммы направленности по данным эха, принятым из целевых местоположений и созданным посредством передачи одного импульса слежения, и (ii) содержат динамически сформированные принимающие линии, которые являются пространственно параллельными.
7. Устройство по п. 6, в котором упомянутый один импульс слежения и по меньшей мере один другой латерально смещенный импульс слежения фокусируют на общей глубине (504), упомянутое устройство дополнительно содержит:
средство для реконструирования на основе данных эха от соответствующих импульсов слежения, сфокусированных на упомянутой общей глубине, фокуса передачи на меньшей глубине, чем упомянутая общая глубина.
8. Устройство по п. 6, в котором упомянутое средство для формирования дополнительно предназначено для формирования по меньшей мере одного другого импульса слежения и для того, чтобы совместить соответствующее получаемое множество параллельно направленных принимающих линий, причем устройство дополнительно содержит средство для интерполяции моментов генерации импульсов или импульсов слежения для корректировки распространения волн между дискретными значениями (156) при определении соответствующей разности фаз.
9. Устройство по п. 6, причем устройство реализовано в виде одной или более интегральных схем.
10. Энергонезависимый машиночитаемый носитель, в котором реализована компьютерная программа, которая содержит инструкции, исполняемые процессором, для осуществления ультразвуковой виброметрии рассеяния поперечных волн (SDUV) посредством множества операций, содержащего:
установление поперечной волны, содержащей монохроматический компонент поперечной волны, и
формирование множества параллельно направленных принимающих линий из одного импульса (404) слежения для выполнения измерений монохроматического компонента поперечной волны, причем параллельно направленные принимающие линии (i) сформированы формирователем диаграммы направленности по данным эха, принятым из целевых местоположений и созданным посредством передачи одного импульса слежения, и (ii) содержат динамически сформированные принимающие линии, которые являются пространственно параллельными.
| US 2004167403 A1, 26.08.2004 | |||
| J.BERCOFF et al | |||
| Supersonic Shear Imaging:A new technique for soft elasticity mapping | |||
| IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, v.51, no.4, April 2004, pp.396-409 | |||
| RICHARD R | |||
| BOUCHARD et al | |||
| Image Quality, Tissue Heating, and Frame Rate Trade-offs in Acoustic Radiation Force Impulse |

