Область техники, к которой относится изобретение
Настоящее изобретение относится к инъекционному устройству согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
В патентом документе WO 2013/117332 А1 раскрыто инъекционное устройство соответствующего типа. Это инъекционное устройство содержит дозатор, который при установке подлежащей выдавливанию дозы инъекционной жидкости поворачивается относительно корпуса. С помощью первого резьбового соединения инъекционная гильза перемещается в дистальном направлении. При этом инъекционная гильза выдвигается из корпуса в дистальном направлении. Расположенная на инъекционной гильзе кнопка управления перемещается вместе с инъекционной гильзой в дистальном направлении. При выдавливании установленной дозы пользователь давит управляющим элементом на инъекционную жидкость в проксимальном направлении и тем самым смещает инъекционную гильзу в проксимальном направлении. При этом дозатор под действием первого резьбового соединения поворачивается в противоположном направлении относительно корпуса и осуществляет выдавливание инъекционной жидкости из контейнера.
В основу настоящего изобретения положена задача предложить инъекционное устройство родственного типа, в котором инъекция осуществляется автоматически.
Раскрытие сущности изобретения
Эта задача решена инъекционным устройством с признаками по п. 1 формулы настоящего изобретения.
Предусматривается, что предлагаемое инъекционное устройство содержит пружину, упирающуюся первым своим концом в инъекционную гильзу, а вторым концом - в корпус. Таким образом, при установке подлежащей выдавливанию дозы инъекционной жидкости пружина действует в направлении продольной центральной оси между двумя движущимися относительно друг друга компонентами. Предусмотрено, что при выдавливании инъекционной жидкости пружина перемещает инъекционную гильзу в проксимальном направлении и тем самым осуществляет выдавливание установленной дозы инъекционной жидкости из контейнера. Резьбовое соединение инъекционной гильзы может быть выполнено так, чтобы инъекционная гильза проходила вдоль оси сравнительно большой путь, и мог быть обеспечен достаточно большой путь сжатия для сжатия пружины. Путь, который проходит инъекционная гильза в осевом направлении, может регулироваться параметрами первого резьбового соединения, так что имеется возможность простой адаптации к требуемому пути сжатия.
Пружина предпочтительно выполнена в виде пружины сжатия. При этом пружина, в частности, представляет собой винтовую пружину сжатия. Однако может быть выгодно выполнить пружину и как пружину растяжения, в частности винтовую пружину растяжения. Конструкция получается простой, если пружина упирается первым своим концом непосредственно в инъекционную гильзу, а вторым концом -непосредственно в корпус. Соответственно, пружина в этом случае действует непосредственно между инъекционной гильзой и корпусом. Но может быть предпочтительна и конструкция, в которой пружина упирается в какой-то компонент, соединенный с инъекционной гильзой и/или с корпусом.
Конструкция получается компактной, если дозатор располагается радиально внутри инъекционной гильзы. Предпочтительно, чтобы пружина была расположена на наружной поверхности дозатора и по меньшей мере частично располагалась в кольцевом пространстве, образованном между дозатором и инъекционной гильзой.
Чтобы можно было просто считывать величину установленной дозы, предусматривается наличие в корпусе смотрового окна, а в инъекционной гильзе - расположенного напротив смотрового окна отверстия, сквозь которое видна нанесенная на наружной поверхности дозатора шкала. Для того чтобы даже при большом осевом перемещении инъекционного устройства и нескольких оборотах дозатора до максимальной устанавливаемой дозы достичь однозначной индикации установленной дозы, предусматривается наличие на инъекционной гильзе участка, который при максимальной установленной дозе закрывает проксимальную область смотрового окна. Для сокращения длины конструкции инъекционного устройства предпочтительно предусмотрено, что участок, закрывающий проксимальную область смотрового окна, представляет собой выступ инъекционной гильзы, выступающий в проксимальном направлении. При этом предпочтительно, чтобы этот выступ проходил только в области смотрового окна, а не охватывал всю наружную поверхность инъекционного устройства. Предусмотрено, что инъекционное устройство содержит контейнер с инъекционной жидкостью. В нулевом положении инъекционного устройства, то есть если количество установленной и подлежащей выдавливанию инъекционной жидкости равно нулю, выступ предпочтительно выступает в область контейнера. Предпочтительно, чтобы в радиальном направлении между контейнером и верхней частью корпуса инъекционного устройства был образован карман, в который в нулевом положении выступает выступ. Благодаря тому, что выступ и контейнер перекрываются в осевом направлении, может быть достигнута сравнительно малая конструктивная длина инъекционного устройства.
Корпус предпочтительно содержит стенку корпуса, на которой выполнена вращающаяся опора дозатора. Эта стенка корпуса предпочтительно расположена приблизительно перпендикулярно продольной центральной оси. В нулевом положении выступ предпочтительно проходит через сквозное отверстие в этой стенке корпуса на проксимальную сторону стенки корпуса. Предпочтительно, с проксимальной стороны этой стенки корпуса расположен контейнер и образован карман для выступа.
Предусмотрено, что во всех положениях инъекционного устройства инъекционная гильза полностью находится в корпусе инъекционного устройства. Предпочтительно предусмотрено, что инъекционная гильза не выходит из корпуса 2 в дистальном направлении.
Инъекционное устройство предпочтительно содержит управляющий элемент, который при установке подлежащей выдавливанию дозы инъекционной жидкости соединен посредством первой муфты с дозатором без возможности относительного вращения, а при выдавливании установленной дозы инъекционной жидкости соединен посредством второй муфты с корпусом без возможности относительного вращения и с возможностью вращения относительно дозатора. При установке дозы управляющий элемент предпочтительно находится в дистальном конечном положении. Поэтому при установке дозы управляющий элемент не перемещается вместе с инъекционной гильзой в дистальном направлении. Для разъединения первой муфты предпочтительно смещение управляющего элемента в проксимальном направлении. При этом разъединение первой муфты соответствует инициированию инъекции, так как при разъединенной первой муфте дозатор может вращаться относительно управляющего элемента, а значит, относительно корпуса, и пружина может смещать инъекционную гильзу в проксимальном направлении, вращая при этом дозатор.
Для выдавливания инъекционной жидкости из контейнера предпочтительно предусмотрен дозирующий поршень, соединенный с дозатором посредством второго резьбового соединениям. При установке подлежащего выдавливанию количества инъекционной жидкости дозирующий поршень предпочтительно соединен с дозатором без возможности относительного вращения и имеет возможность вращения вместе с дозатором. При выдавливании подлежащего выдавливанию количества инъекционной жидкости дозирующий поршень предпочтительно соединен с корпусом без возможности относительного вращения и имеет возможность перемещения под действием второго резьбового соединения в проксимальном направлении. Благодаря этому достигается простота конструкции инъекционного устройства.
Краткое описание чертежей
Ниже примеры осуществления настоящего изобретения раскрыты со ссылкой на чертежи. На чертежах представлены:
на ФИГ. 1 - вид сбоку инъекционного устройства в нулевом положении,
на ФИГ. 2 - разрез по линии на ФИГ. 1,
на ФИГ. 3 - вид сбоку инъекционного устройства с ФИГ. 1 в положении максимального выдвижения,
на ФИГ. 4 - разрез по линии IV-IV на ФИГ. 3,
на ФИГ. 5 - вид в аксонометрической проекции управляющего элемента инъекционного устройства с ФИГ. 1-4,
на ФИГ. 6 - вид сбоку управляющего элемента с ФИГ. 5,
на ФИГ. 7 - разрез по линии VII-VII на ФИГ. 6,
на ФИГ. 8 - вид управляющего элемента в направлении стрелки VIII на ФИГ. 6,
на ФИГ. 9 - схематическое изображение фиксирующего выступа управляющего элемента,
на ФИГ. 10 - схематическое изображение управляющего элемента из двух отдельных деталей на виде в аксонометрии,
на ФИГ. 11 - вид сбоку двух упомянутых отдельных деталей управляющего элемента,
на ФИГ. 12 - вид сбоку захвата инъекционного устройства,
на ФИГ. 13 - разрез по линии XIII- XIII на ФИГ. 12,
на ФИГ. 14 - разрез по линии XIV-XIV на ФИГ. 12,
на ФИГ. 15 - разрез по линии XV-XV на ФИГ. 12,
на ФИГ. 16 - разрез по линии XVI-XVI на ФИГ. 12,
на ФИГ. 17 - вид сбоку соединительного элемента инъекционного устройства,
на ФИГ. 18 - разрез по линии XVIII-XVIII на ФИГ. 17,
на ФИГ. 19 - вид сбоку поршневого штока инъекционного устройства,
на ФИГ. 20 - разрез по линии ХХ-ХХ на ФИГ. 19,
на ФИГ. 21 - разрез по линии XXI-XXI на ФИГ. 19,
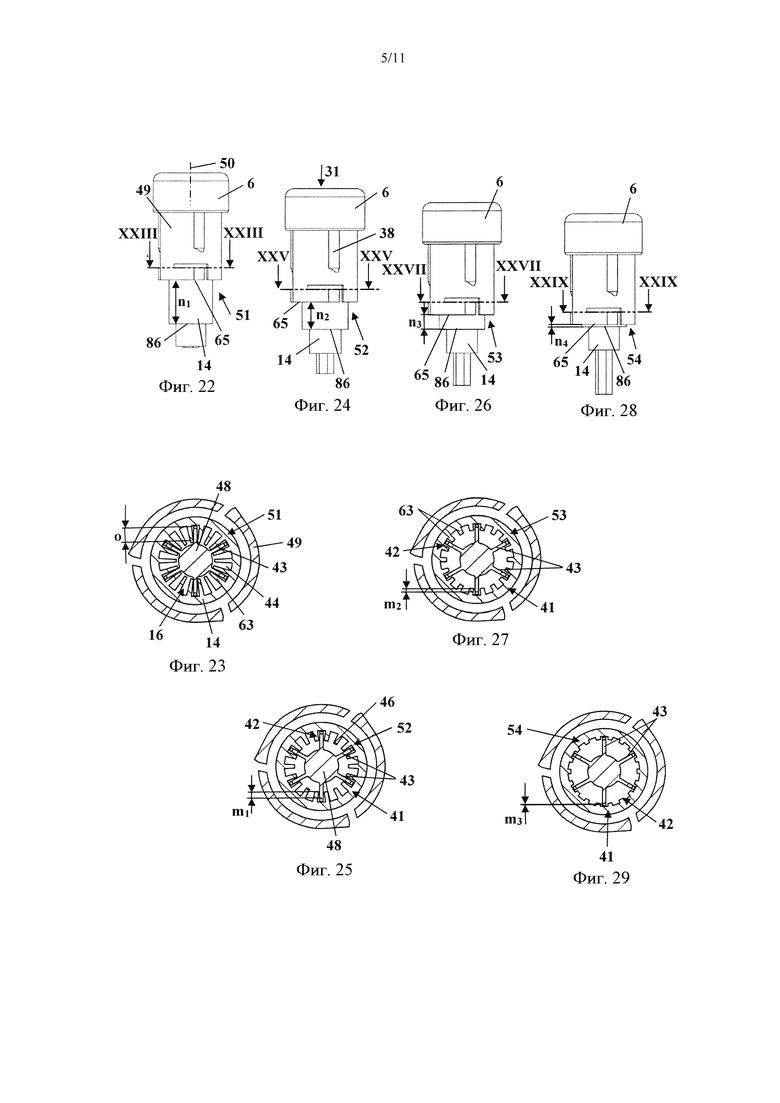
на ФИГ. 22 - вид сбоку управляющего элемента и захвата в положении соединения,
на ФИГ. 23 - разрез по линии XXIII-XXIII на ФИГ. 22,
на ФИГ. 24 - вид сбоку управляющего элемента и захвата в первом взаиморасположении,
на ФИГ. 25 - разрез по линии XXV-XXV на ФИГ. 24,
на ФИГ. 26 - вид сбоку управляющего элемента и захвата во втором взаиморасположении,
на ФИГ. 27 - разрез по линии XXVII- XXVII на ФИГ. 26,
на ФИГ. 28 - вид сбоку управляющего элемента и захвата в третьем взаиморасположении,
на ФИГ. 29 - разрез по линии XXIX-XXIX на ФИГ. 28,
на ФИГ. 30 - вид сбоку дозатора инъекционного устройства,
на ФИГ. 31 - разрез по линии XXXI-XXXI на ФИГ. 30,
на ФИГ. 32 - вид сбоку инъекционной гильзы инъекционного устройства,
на ФИГ. 33 - разрез по линии XXXIII-XXXIII на ФИГ. 32,
на ФИГ. 34 - разрез по линии XXXIV-XXXIV на ФИГ. 32,
на ФИГ. 35 - вид сбоку верхней корпусной детали инъекционного устройства,
на ФИГ. 36 - разрез по линии XXXVI-XXXVI на ФИГ. 35,
на ФИГ. 37 - разрез по линии XXXVII-XXXVII на ФИГ. 35,
на ФИГ. 38 - вид сбоку в направлении стрелки XXXVIII на ФИГ. 36,
на ФИГ. 39 - вид сбоку другого инъекционного устройства в нулевом положении,
на ФИГ. 40 - разрез по линии XL-XL на ФИГ. 39,
на ФИГ. 41 - увеличенное изображение фрагмента XLI с ФИГ. 40,
на ФИГ. 42 - разрез по линии XLII-XLII на ФИГ. 41,
на ФИГ. 43 - разрез по линии XLIII-XLIII на ФИГ. 41,
на ФИГ. 44 - вид сбоку инъекционного устройства в конечном положении после выдавливания установленной дозы инъекционной жидкости,
на ФИГ. 45 - разрез по линии XLV-XLV на ФИГ. 44,
на ФИГ. 46 - увеличенное изображение фрагмента XLVI с ФИГ. 45,
на ФИГ. 47 - разрез по линии XLVII-XLVII на ФИГ. 46,
на ФИГ. 48 - разрез по линии XLVIII-XLVIII на ФИГ. 46,
на ФИГ. 49 и ФИГ. 50 - вид в аксонометрии захвата инъекционного устройства,
на ФИГ. 51 - вид захвата сбоку,
на ФИГ. 52 - разрез по линии LII-LII на ФИГ. 51,
на ФИГ. 53 - разрез по линии LIII-LIII на ФИГ. 51,
на ФИГ. 54 - разрез по линии LIV-LIV на ФИГ. 51.
Осуществление изобретения
На ФИГ. 1 представлено инъекционное устройство 1 в качестве примера осуществления механического инъекционного устройства, в котором выдавливание дозы инъекционной жидкости осуществляется автоматически. Инъекционное устройство 1 содержит корпус 2, включающий в себя верхнюю корпусную деталь 3 и закрепленный на верхней корпусной детали 3 держатель 4. Держатель 4 расположен на проксимальной стороне верхней корпусной детали 3. На проксимальной стороне держателя 4 закреплена инъекционная игла 8. На дистальной стороне инъекционного устройства 1 расположен управляющий элемент 6. Управляющий элемент 6 посредством муфты 20 может быть соединен без возможности относительного вращения с верхней корпусной деталью 3. Верхняя корпусная деталь 3 содержит смотровое окно 7, предпочтительно выполненное из прозрачного материала, так что сквозь смотровое окно 7 видна расположенная в верхней корпусной детали 3 инъекционная гильза 17. Инъекционное устройство 1 имеет продольную центральную ось 50, идущую в продольном направлении корпуса 2 инъекционного устройства 1.
Дистальный конец инъекционного устройства 1 это конец, направленный от удерживаемой на инъекционном устройстве 1 инъекционной иглы 8. «Проксимальной» называется сторона инъекционного устройства 1, направленная при инъекции к месту укола, а «дистальной» - сторона, направленная при инъекции от места укола. Проксимальным направлением называется направление инъектирования, т.е. направление к инъекционной игле 8 или направление, в котором инъекционная жидкость выдавливается из контейнера. Дистальным направлением называется противоположное направление, т.е. направление от инъекционной иглы 8.
На ФИГ. 1 и 2 представлено инъекционное устройство 1 в нулевом положении 28, в котором никакой дозы инъекционной жидкости не установлено. Управляющий элемент 6 находится в своем дистальном конечном положении 90. Как показано на ФИГ. 2, в держателе 4 располагается контейнер 5 с инъекционной жидкостью. В контейнере 5 находится пробка 10, к которой прилегает поршневой диск 13 дозирующего поршня 11. Дозирующий поршень 11 включает в себя, кроме того, поршневой шток 12 с наружной резьбой 72.
Наружная сторона инъекционной гильзы 17 видна сквозь смотровое окно 7 в верхней корпусной детали 3. В инъекционной гильзе 17 имеется отверстие 26, сквозь которое видна наружная поверхность расположенного радиально внутри инъекционной гильзы 17 дозатора 18. На наружной поверхности дозатора 18, который можно также назвать трубкой со шкалой, имеется показанная на ФИГ. 30 шкала 59, которая видна пользователю сквозь смотровое окно 7 и отверстие 26 и которая показывает установленную дозу подлежащей выдавливанию инъекционной жидкости.
Инъекционная гильза 17 может перемещаться в верхней корпусной детали 3 в направлении продольной центральной оси 50 и удерживается без возможности вращения относительно верхней корпусной детали 3. При этом во всех состояниях инъекционного устройства 1 инъекционная гильза 17 полностью находится внутри корпуса 2, а именно внутри верхней корпусной детали 3. Дозатор 18 и инъекционная гильза 17 соединены друг с другом первым резьбовым соединением 19. Дозатор 18 крепится с возможностью вращения в поворотной опоре 21 в верхней корпусной детали 3, но не имеет возможности сдвигаться в осевом направлении внутри верхней корпусной детали 3. Дозатор 18 вторым резьбовым соединением 22 соединен с наружной резьбой 72 поршневого штока 12.
В верхней корпусной детали 3 находится захват 14. Захват 14 соединен без возможности относительного вращения с дозатором 18 посредством соединения 24. Не дающее проворачиваться соединение 24 может быть прессованным соединением. Но может быть предусмотрено, что не дающее проворачиваться соединение 24 представляет собой соединение с геометрическим замыканием. Захват 14 крепится с возможностью вращения в поворотной опоре 15, расположенной в верхней корпусной детали 3. Поворотная опора 15 образована краем верхней корпусной детали 3.
На ФИГ. 2 показана также расположенная в верхней корпусной детали 3 пружина 9, выполненная в виде пружины сжатия, и именно винтовой пружины сжатия. Пружина 9 упирается первым своим концом 70 в опорный край 27 инъекционной гильзы 17, а вторым концом 71 - в опорный край 25 верхней корпусной детали 3. На опорном краю 25 образована также поворотная опора 15 для захвата 14. Пружина 9 радиально расположена снаружи дозатора 18 и в показанном на ФИГ. 2 нулевом положении 28 ее проксимальный участок находится в кольцевом пространстве 64, образованном между инъекционной гильзой 17 и дозатором 18.
Управляющий элемент 6 посредством соединительного элемента 56, выполненного в виде втулки, соединен без возможности относительного вращения с поршневым штоком 12. Управляющий элемент 6 через пружину 23, выполненную в виде винтовой пружины сжатия, опирается на верхнюю корпусную деталь 3. Эта пружина 23, отжимающая управляющий элемент 6 в дистальном направлении, не оказывает влияния на скорость инъектирования. Пружина 23 предназначена лишь для того, чтобы пользователь, задействуя управляющий элемент 6, мог прикладывать пригодное усилие. Управляющий элемент 6 имеет заплечик 32, который при управляющем элементе 6, нажатом в проксимальном направлении, воздействует на край 33 верхней корпусной детали 3, и образует с ним упор, ограничивающий проксимальное положение управляющего элемента 6. Для ограничения дистального конечного положения 90 управляющего элемента 6 предпочтительно предусмотрен дополнительный упор, который может быть выполнен, например, на захвате 14. Между управляющим элементом 6 и верхней корпусной деталью 3 действует фиксирующее устройство 35, содержащее несколько фиксирующих консолей 36, одна из которых видна на ФИГ. 2. Управляющий элемент 6 в показанном на ФИГ. 1 и 2 нулевом положении 28 соединяется муфтой 16 с захватом 14 без возможности относительного вращения. Кроме того, между управляющим элементом 6 и захватом 14 образовано регулирующее устройство 41, содержащее ряд фиксирующих пазов 44 в захвате 14.
Когда управляющий элемент 6 не задействован, пружина 23 отжимает управляющий элемент 6 в его дистальное конечное положение 90, в котором муфта 20 разъединена и управляющий элемент 6 имеет возможность вращения относительно корпуса 2. Для установки подлежащего выдавливанию количества инъекционной жидкости пользователь поворачивает управляющий элемент 6 вокруг продольной центральной оси 50. При этом поворачивается и соединенный муфтой 16 с управляющим элементом 6 без возможности относительного вращения захват 14. Захват 14 посредством соединения 24 соединен без возможности относительного вращения с дозатором 18, который также поворачивается вместе с захватом. Поршневой шток 12 посредством соединительного элемента 56 соединен без возможности относительного вращения с управляющим элементом 6 и также поворачивается вместе с ним. Под действием первого резьбового соединения 19 и фиксации инъекционной гильзы 17 в верхней корпусной детали 3 без возможности относительного вращения, инъекционная гильза 17 при повороте дозатора 18 перемещается в дистальном направлении 30. При этом инъекционная гильза 17 с опорным краем 27 пружины 9 смещается к опорному краю 25 пружины 9, вследствие чего пружина 9 сжимается. Опорный край 25 корпуса 2 может при этом служить упором для дистального положения инъекционной гильзы 17, то есть и для максимально возможной устанавливаемой дозы. Осевое положение управляющего элемента 6 при установке подлежащей выдавливанию дозы инъекционной жидкости не изменяется. Вследствие перемещения инъекционной гильзы 17 в дистальном направлении сокращена длина кольцевого пространства 64.
На ФИГ. 3 и 4 показано инъекционное устройство 1 в положении 29 максимального выдвижения, в котором установлена максимальная доза. Длина пружины 9 сократилась от показанной на ФИГ. 2 длины а несжатой пружины до показанной на ФИГ. 4 длины b сжатой пружины. Но может быть предусмотрено и предварительное поджатие пружины 9 в нулевом положении 28. Инъекционная гильза 17 может прилегать к опорному краю 25. В этом примере осуществления пружина 9 в положении 29 максимального выдвижения полностью находится в кольцевом пространстве 64. Как показано на ФИГ. 3, в положении 29 максимального выдвижения сквозь смотровое окно 7 видна максимальная доза. На инъекционной гильзе 17 имеется выступ 34, который выступает в проксимальном направлении и закрывает видимую сквозь смотровое окно 7 область дозатора 18, не участвующую в индикации установленной дозы. В радиальном направлении между контейнером 5 и верхней корпусной деталью 3 образован карман 92, в который входит выступ 34 в нулевом положении 28. При этом выступ 34 проходит сквозь корпусную стенку 87 верхней корпусной детали 3 на проксимальную сторону корпусной стенки 87. В корпусной стенке 87 образована вращающаяся опора 21 для дозатора 18. В области корпусной стенки 87 расположено также резьбовое соединение 22 поршневого штока 12 и дозатора 18.
Для выдавливания установленной дозы инъекционной жидкости пользователь нажимает на управляющий элемент 6 в проксимальном направлении 31. При этом выступы 38 муфты 20 (ФИГ. 1) входят в зацепление с фиксирующими элементами 85 фиксирующего устройства 35 (ФИГ. 38). Тем самым управляющий элемент 6 фиксируется без возможности вращения относительно верхней корпусной детали 3. Одновременно муфта 16, вследствие осевого смещения управляющего элемента 6 относительно захвата 14 по меньшей мере частично разъединяется, так что захват 14 получает возможность вращения вместе с дозатором 18 вокруг продольной центральной оси 50. Это вращательное движение происходит под действием осевого давления сжатой пружины 9 на инъекционную гильзу 17, которое вызывает вращение дозатора 18. А это вращение вызвано наличием резьбового соединения 19 и отсутствием возможности вращения инъекционной гильзы 17 относительно верхней корпусной детали 3. Поршневой шток 12 через соединительный элемент 56 и управляющий элемент 6 соединен без возможности относительного вращения с верхней корпусной деталью 3. Поэтому при вращении дозатора 18 второе резьбовое соединение 22 вызывает перемещение поршневого штока 12 в проксимальном направлении 31. Тем самым производится выдавливание установленного количества инъекционной жидкости из контейнера 5.
Инъекция происходит автоматически после разъединения муфты 16 под действием силы, запасенной пружиной 9. Пружина 9 выполнена так, что запасенной ею силы достаточно для того, чтобы преодолеть сопротивление пробки 10 и выдавить инъекционную жидкость из контейнера 5. Для установки скорости инъектирования в инъекционном устройстве 1 имеется регулирующее устройство 41. Этот регулирующее устройство 41 воздействует на величину крутящего момента, который требуется для поворота захвата 14 относительно управляющего элемента 6. При этом требуемый крутящий момент зависит от осевого положения управляющего элемента 6 относительно верхней корпусной детали 3 и захвата 14. Ниже это будет объяснено подробнее.
На ФИГ. 5-11 детально показана конструкция управляющего элемента 6. Управляющий элемент 6 содержит выступающий из верхней корпусной детали 3 управляющий участок 55, посредством которого пользователь может вращать или смещать в проксимальном направлении 31 управляющий элемент 6. Управляющий элемент 6 содержит показанный на ФИГ. 5 и 6 втулочный участок 49, который в нулевом положении 28 и положении 29 максимального выдвижения частично выступает из верхней корпусной детали 3, и на котором закреплены выступы 38 муфты 20. В этом примере осуществления на проксимальном конце втулочного участка 49 расположены в общей сложности три фиксирующие консоли 36, каждая из которых имеет на свободном конце фиксирующий элемент 47. Это показано также на ФИГ. 8. Выступающие наружу фиксирующие элементы 47 могут смещаться радиально внутрь вместе с фиксирующими консолями 36.
Как это видно и из ФИГ. 5, управляющий элемент 6 содержит соединительную ножку 66, на наружной поверхности которой имеются две лыски 67 для соединения без возможности относительного вращения с соединительным элементом 56. Как показано на ФИГ. 17 и 18, на внутренней стороне выполненного в виде втулки соединительного элемента 56 имеются соответствующие плоские участки 58, взаимодействующие с лысками 67 соединительной ножки 66 и тем самым соединяющие управляющий элемент 6 с соединительным элементом 56 без возможности относительного вращения. Как показано на ФИГ. 19 и 20, поршневой шток 12 на своем дистальном концевом участке 73 имеет соответствующие лыски 74 для соединения без возможности относительного вращения с поршневым штоком 12 и соединительным элементом 56. На ФИГ. 19 и 21 показана также наружная резьба 72 поршневого штока 12.
Как показано на ФИГ. 5 и 8, в этом примере осуществления управляющий элемент 6 содержит шесть выступающих радиально наружу относительно продольной центральной оси 50 фиксирующих выступов 43, образующих вместе с фиксирующими пазами 44 захвата 14 фиксирующее устройство 42 (ФИГ. 25). Как схематически показано на ФИГ. 9, каждый из фиксирующих выступов 43 имеет радиально наружную фиксирующую кромку 45. В этом примере осуществления фиксирующие кромки 45 наклонены под углом α к продольной центральной оси 50. Угол α определяется требуемым расстоянием приведения в действие между самой малой и самой высокой устанавливаемой скоростью инъектирования и требуемой разницей между самой малой и самой высокой скоростью инъектирования. Как схематически показано на ФИГ. 9, фиксирующие выступы 43 расположены на штыревом участке 48 управляющего элемента 6, который расположен внутри втулочного участка 49 и радиально отделен от втулочного участка 49. К штыревому участку 48 примыкает на проксимальном конце соединительная ножка 66. В этом примере осуществления фиксирующие выступы 43 выполнены одной деталью с управляющим элементом 6 и состоят из того же материала, что и управляющий элемент 6. Однако для получения требуемых характеристик фиксации может быть предпочтительно изготавливать фиксирующие выступы 43 из другого материала, например из эластомера или из резины.
Как показано на ФИГ. 10 и 11, управляющий элемент 6 для простоты изготовления и сборки состоит из двух отдельных деталей: первой детали 39 и второй детали 40. Управляющий элемент 6 может состоять и из большего количества отдельных деталей. В этом примере осуществления отдельные детали 39 и 40 жестко соединяются друг с другом по фиксирующей кромке 37.
На ФИГ. 12-16 детально показана конструкция захвата 14. Захват 14 содержит опорный участок 57 уменьшенного диаметра; которым захват 14 опирается в верхней корпусной детали 3 с возможностью вращения. Как показано на ФИГ. 13, внутри захвата 14 в его проксимальной области расположен конический участок 61, к дистальной стороне которого примыкает цилиндрический участок 62.
Конический участок 61 и цилиндрический участок 62 образованы большим числом показанных на ФИГ. 14-16 выступов 63, отходящих радиально внутрь от наружной стенки 68 захвата 14. Между выступами 63 в окружном направлении образованы фиксирующие пазы 44. Выступы 63 имеют радиально внутренние ответные фиксирующие кромки 46, которые наклонены под углом β к продольной центральной оси 50. Причем угол β раскрыт в проксимальном направлении. В частности, угол β равен углу α кромок 45 фиксирующих выступов 43.
На цилиндрическом участке 62 выступы 63 ограничивают внутреннее пространство 60, внутренний диаметр h которого, показанный на ФИГ. 14, лишь немного больше наружного диаметра штыревого участка 48. На цилиндрическом участке 62 выступы 63 имеют в радиальном направлении высоту f1, примерно соответствующую радиальному протяжению фиксирующих выступов 43.
На ФИГ. 15 показан разрез конического участка 61. В показанной на ФИГ. 15 плоскости разреза внутренние фиксирующие кромки 46 выступов 63 отстоят от продольной центральной оси 50 на расстоянии g1. Измеренная в радиальном направлении высота f2 выступов 63 в показанной на ФИГ. 15 плоскости разреза через конический участок 61 заметно меньше высоты f1 на цилиндрическом участке 62.
На ФИГ. 16 показан разрез конического участка 61 вблизи от проксимального конца внутреннего пространства 60. В этой плоскости разреза фиксирующие кромки 46 отстоят от продольной центральной оси 50 на расстоянии g2, которое заметно больше расстояния g1. Измеренная в радиальном направлении высота f3 выступов 63 в показанной на ФИГ. 16 плоскости разреза через конический участок 61 заметно меньше высоты f2 в показанной на ФИГ. 15 плоскости разреза, лежащей ближе к дистальному концу.
На ФИГ. 22-29 показаны управляющий элемент 6 и захват 14 в различных осевых взаиморасположениях. На ФИГ. 22 и 23 показаны управляющий элемент 6 и захват 14 в положении 51 сцепления. В этом положении управляющий элемент 6 и захват 14 соединены муфтой 16 без возможности относительного вращения. Муфта 16 образована выступами 63 цилиндрического участка 62. Выступы 63 почти доходят до штыревого участка 48 и перекрываются в окружном направлении с фиксирующими выступами 43 с их дистальной стороны на глубину о зацепления. Глубина о зацепления выбрана таким образом, чтобы захват 14 и управляющий элемент 6 были соединены без возможности относительного вращения. При этом на ФИГ. 23, 25, 27 и 29 показаны разрезы управляющего элемента 6 на дистальной стороне фиксирующих выступов 43. Втулочный участок 49 содержит проксимальную торцевую сторону 65. Эта проксимальная торцевая сторона 65 в положении 51 сцепления находится на первом расстоянии n1 от нижней кромки 86 захвата 14, если измерять в направлении продольной центральной оси 50. При этом нижняя кромка 86 - это кромка захвата 14, которая прилегает к выступающему внутрь краю верхней корпусной детали 3.
На ФИГ. 24 и 25 показаны управляющий элемент 6 и захват 14 в первом взаиморасположении 52, в котором между управляющим элементом 6 и захватом 14 действует регулирующее устройство 41. Проксимальная торцевая сторона 65 втулочного участка 49 находится от нижней кромки 86 захвата 14 на расстоянии n2, которое меньше расстояния n1. Как показано на ФИГ. 25, фиксирующие выступы 43 находятся на коническом участке 61, на котором расстояние до фиксирующих кромок 46 выступов 63 от штыревого участка 48 и от продольной центральной оси 50 уменьшается. В этом взаиморасположении фиксирующие выступы 43 и выступы 63 перекрываются в радиальном направлении на дистальной стороне фиксирующих выступов 43 на глубину фиксации. Глубина m1 фиксации заметно меньше глубины о зацепления в положении 51 сцепления. Глубина m1 фиксации выбрана такой, чтобы захват 14 мог вращаться относительно управляющего элемента 6, деформируя фиксирующие выступы 43.
Чтобы перейти от положения 51 сцепления в первое взаиморасположение 52, пользователь должен сместить управляющий элемент 6 в проксимальном направлении 31, как показано на ФИГ. 24. При этом управляющий элемент 6 сместится относительно верхней корпусной детали 3, и выступы 38 управляющего элемента 6 войдут в зацепление с показанным на ФИГ. 36 и 38 фиксатором 84, образованным на внутренней стороне верхней корпусной детали 3. На фиксаторе 84 имеется ряд фиксирующих элементов 85, предотвращающих вращение управляющего элемента 6 относительно наружной корпусной детали 3. Выступы 38 вместе с фиксатором 84 образуют муфту 20.
В показанном на ФИГ. 24 и 25 первом взаиморасположении 52 захват 14 может вращаться относительно верхней корпусной детали 3 и управляющего элемента 6, если запасенной в пружине 9 энергии достаточно для деформирования фиксирующих выступов 43 и смещения пробки 10 в проксимальном направлении, чтобы инъекционная жидкость выдавливалась из контейнера 5. Однако вследствие того, что для вращения захвата 14 относительно управляющего элемента 6 требуется высокий крутящий момент, выдавливание инъекционной жидкости происходит очень медленно.
В показанном на ФИГ. 26 и 27 втором взаиморасположении 53 управляющего элемента 6 и захвата 14 пользователь вдавил управляющий элемент 6 в проксимальном направлении 31 дальше в верхнюю корпусную деталь 3. В этом положении проксимальная торцевая сторона 65 находится на третьем расстоянии m3 от нижней кромки 86 захвата 14. Это третье расстояние m3 заметно меньше второго расстояния m2. При смещении управляющего элемента 6 в проксимальном направлении 31 фиксирующие выступы 43 движутся на коническом участке 61 дальше в проксимальном направлении, т.е. в направлении увеличения внутреннего диаметра конического участка 61. Дистальная сторона фиксирующих выступов 43 меньше перекрывается с выступами 63 в радиальном направлении относительно продольной центральной оси 50, так что образуется лишь малая глубина m2 фиксации. В этом положении регулирующего устройства 41 крутящий момент, требуемый для вращения захвата 14 относительно управляющего элемента 6, заметно меньше, чем в показанном на ФИГ. 24 и 25 первом взаиморасположении 52. Достаточно лишь небольшого деформирования фиксирующих выступов 43, чтобы преодолеть выступы 63 и перейти в следующее положение фиксации. Благодаря этому инъектирование в показанном на ФИГ. 26 и 27 втором взаиморасположении производится с большей скоростью, чем в показанном на ФИГ. 24 и 25 первом взаиморасположении.
На ФИГ. 28 и 29 показаны управляющий элемент 6 и захват 14 в третьем взаиморасположении 54, в котором проксимальная торцевая сторона 65 находится от нижней кромки 86 на очень малом четвертом расстоянии n4. В этом третьем взаиморасположении 54 управляющий элемент 6 находится в своем проксимальном конечном положении, в котором показанный на ФИГ. 2 заплечик 32 упирается в край 33 верхней корпусной детали 3. Как показано на ФИГ. 29, в третьем взаиморасположении 54 фиксирующие выступы 43 чрезвычайно мало перекрываются в радиальном направлении с выступами 63. Глубина m3 фиксации минимальна. Может также быть предусмотрена глубина m3 фиксации, равная нулю, чтобы фиксирующие выступы 43 могли свободно вращаться, не задевая выступы 63, и чтобы в этом третьем взаиморасположении 54 регулирующее устройство 41 не затормаживало вращение захвата 14 относительно управляющего элемента 6. Поэтому в третьем взаиморасположении 54 достигается максимально возможная скорость инъектирования. Энергия, требуемая для вращения захвата 14 относительно управляющего элемента 6, мала. И скорость инъектирования определяется силой, накопленной пружиной 9, и силами трения между деталями, движущимися относительно друг друга.
В этом примере осуществления угол α фиксирующей кромки 45 фиксирующего выступа 43 и угол β фиксирующей кромки 46 выступа 63 равны. Благодаря этому по всей высоте с фиксирующих выступов 43 имеют место одинаковые глубины m1, m2, m3 фиксации. При неравенстве углов α и β глубины m фиксации на разных участках фиксирующих выступов 43 различны. Силу воздействия регулирующего устройства 41 можно изменять соответствующим выбором конструкции и количества фиксирующих выступов 43.
На ФИГ. 30 и 31 показан в деталях дозатор 18. Дозатор 18 имеет наружную резьбу 75, которая вместе с показанной на ФИГ. 34 внутренней резьбой 80 инъекционной гильзы 17 образует первое резьбовое соединение 19. Дозатор 18 содержит опорный штуцер 69, посредством которого дозатор крепится с возможностью вращения в опорном отверстии 82 в верхней корпусной детали 3 (ФИГ. 36 и 37). Дозатор 18 содержит контактные выступы 76, прилегающие к дистальной стороне корпусной стенки 87, в которой проделано опорное отверстие 82. За счет этого при вращении дозатора 18 снижается трение между дозатором 18 и верхней корпусной деталью 3. Как показано на ФИГ. 31, опорный штуцер 69 снабжен внутренней резьбой 77, которая вместе с наружной резьбой 72 поршневого штока 12 образует второе резьбовое соединение 22 (ФИГ. 2).
Как показано на ФИГ. 32, инъекционная гильза 17 имеет прорези 78, сделанные для снижения веса. На ФИГ. 32-34 показано также отверстие 26, сквозь которое пользователь может видеть шкалу 59 дозатора 18 (ФИГ. 30).
На наружной поверхности инъекционной гильзы 17 имеются два расположенных напротив друг друга направляющих паза 79. На верхней корпусной детали 3 сформированы два ответных направляющих выступа 81, один из которых виден на ФИГ. 36. Эти направляющие выступы 81 входят в направляющие пазы 79 и таким образом обеспечивают перемещение инъекционной гильзы 17 в верхней корпусной детали 3 в направлении продольной оси 50 без возможности вращения.
Как показано на ФИГ. 37, в корпусной стенке 87 рядом с опорным отверстием 82 имеется сквозное отверстие 83, сквозь которое проходит выступ 34 инъекционной гильзы 17. Выступ 34 охватывает не всю наружную поверхность инъекционной гильзы 17, а только ту ее часть, в которой проделано смотровое окно 7. Благодаря выступу 34 достигается малая конструктивная длина инъекционного устройства 1 при достаточно большом диапазоне перемещения дозатора 18. При установке дозы дозатор 18 вращается, и инъекционная гильза 17 смещается в осевом направлении. Благодаря этому сквозь отверстие 26 видна соответствующая установленная доза.
Как показано на ФИГ. 38, в этом примере осуществления фиксирующие элементы 85 фиксатора 84 выполнены асимметрично. Фиксирующие элементы 85 взаимодействуют с фиксирующими элементами 47 управляющего элемента 6 (ФИГ. 5). Вследствие асимметричного выполнения фиксирующих элементов установленная доза уже не может быть уменьшена. Однако соответствующее исполнение фиксирующих элементов 85 и фиксирующих элементов 47 может допускать и обратное вращение управляющего элемента 6, делая возможным уменьшение установленной дозы.
При установке подлежащего выдавливанию количества инъекционной жидкости слышны щелчки фиксирующих элементов 47 и 85. А так как в процессе выдавливания инъекционной жидкости управляющий элемент 6 и верхняя корпусная деталь 3 соединены друг с другом без возможности относительного вращения, то щелчки фиксирующего устройства 35 при выдавливании инъекционной жидкости не слышны. Вместо них пользователь в процессе выдавливания инъекционной жидкости слышит щелчки фиксирующего устройства 42 регулирующего устройства 41. При этом фиксирующее устройство 42 в первом положении 52 фиксации производит более громкие щелчки через более длительные промежутки времени. Чем дальше вдавлен управляющий элемент 6 в проксимальном направлении 31, тем тише становятся щелчки и тем чаще они следуют друг за другом. Благодаря этому пользователю «слышна» скорость инъектирования. При установке подлежащей выдавливанию дозы инъекционной жидкости фиксирующие элементы 85 совместно с фиксирующими элементами 47 образуют фиксирующее устройство 35. При выдавливании инъекционной жидкости фиксирующие элементы 85 взаимодействуют с выступами 38, образуя с ними муфту 20, и соединяют управляющий элемент 6 с верхней корпусной деталью 3 без возможности относительного вращения.
На ФИГ. 39-54 представлен пример осуществления механического инъекционного устройства 101, конструкция которого, по существу, соответствует инъекционному устройству 1, представленному на предшествующих фигурах. На всех фигурах одними и теми же номерами позиций обозначены соответствующие элементы. Инъекционное устройство 101 содержит корпус 2 со смотровым окном 7, сквозь которое видна инъекционная гильза 17. Инъекционное устройство 101 содержит управляющий элемент 106, которая в показанном на ФИГ. 39 и 40 нулевом положении 28 находится в дистальном конечном положении 90. В этом положении управляющий элемент 106 может удерживаться, например, не показанным упором, образованном на захвате 114.
Как показано на ФИГ. 40, инъекционное устройство 101, по существу, отличается от инъекционного устройства 1 конструкцией управляющего элемента 106 и захвата 114. Управляющий элемент 106 предварительно нагружен пружиной 23 со смещением в свое дистальное конечное положение 90. Заплечик 32 управляющего элемента 106 и край 33 верхней корпусной детали 3 образуют упор между управляющим элементом 106 и верхней корпусной деталью 3. Между управляющим элементом 106 и верхней корпусной деталью 3 действует фиксирующее устройство 35. Захват 114 с поворотной опорой 15 расположен в верхней корпусной детали 3. Между захватом 114 и управляющим элементом 106 образована муфта 116, которая в показанном дистальном конечном положении 90 управляющего элемента 106 соединяет управляющий элемент 106 с захватом 114 без возможности относительного вращения.
На ФИГ. 41-43 подробно показаны конструкции управляющего элемента 106 и захвата 114. Как показано на ФИГ. 42, в дистальной концевой области верхней корпусной детали 3 располагается фиксатор 84, образованный рядом фиксирующих элементов 85. При установке подлежащего выдавливанию количества инъекционной жидкости управляющий элемент 106 поворачивают в первом направлении 88 вращения относительно верхней корпусной детали 3. При этом фиксирующие элементы 47 зацепляют фиксирующие элементы 85 верхней корпусной детали 3. Это сопровождается щелчками, которые слышит пользователь. В захвате 114 имеются приемные углубления 117, выполненные в виде радиальных пазов, в которые входят соединительные выступы 104 управляющего элемента 106. Соединительные выступы 104 могут быть выполнены так же, как фиксирующие выступы 43 инъекционного устройства 1. Соединительные выступы 104 и приемные углубления 117 образуют муфту 116.
Как показано на ФИГ. 41 и 43, на проксимальной стороне содержащего приемные углубления 117 участка захвата 114 образовано внутреннее пространство 110, через которое в показанном дистальном конечном положении 90 управляющего элемента 106 проходит только соединительная ножка 66 управляющего элемента 106.
На ФИГ. 44 и 45 показано инъекционное устройство 101 в конечном положении 102. После установки подлежащего выдавливанию количества инъекционной жидкости посредством вращения управляющего элемента 106 в первом направлении 88 вращения, управляющий элемент 106 перемещают в проксимальном направлении 31 до тех пор, пока он не окажется в своем показанном на ФИГ. 44 и 45 проксимальном конечном положении 91. В процессе этого проксимального перемещения управляющего элемента 106 муфта 116 разъединяется, захват 114 освобождается и получает возможность вращаться вместе с дозатором 18 вокруг продольной центральной оси 50. Это вращательное движение осуществляется под действием энергии, запасенной в пружине 9, которая перемещает инъекционную гильзу 17 в проксимальном направлении 31. В проксимальном конечном положении 91 управляющего элемента 106 заплечик 32 управляющего элемента 106 упирается в край 33 верхней корпусной детали 3 и образует упор для проксимального конечного положения 91. Соединительные выступы 104 управляющего элемента 106 располагаются во внутреннем пространстве 110 захвата 114. Как показано на ФИГ. 46 и 48, соединительные выступы 104 могут свободно проворачиваться во внутреннем пространстве 110. Благодаря этому захват 114 после разъединения муфты 116 может вращаться вместе с дозатором 18 во втором направлении 89 вращения, выдавливая при этом установленную дозу инъекционной жидкости из контейнера 5.
Как показано на ФИГ. 47, в проксимальном конечном положении 91 управляющего элемента 106 выступы 38 управляющего элемента 106 располагаются между фиксирующими элементами 85 и тем самым соединяют управляющий элемент 106 с верхней корпусной деталью 3 без возможности относительного вращения. Соединительные выступы 104 находятся не в приемных углублениях 117, а целиком во внутреннем пространстве 110, что позволяет им свободно вращаться. Выступы 38 совместно с фиксирующими элементами 85 фиксатора 84 образуют муфту 20.
На ФИГ. 49-54 подробно показана конструкция захвата 114. Как показано на ФИГ. 49, приемные углубления 117 выполнены в виде радиальных пазов. Захват 114 содержит опорный участок 115 и этим участком опирается с возможностью вращения в корпусной стенке 87 (ФИГ. 46). Как показано на ФИГ. 49 и 50, захват 114 содержит на проксимальном концевом участке стопорные выступы 118, служащие для соединения с дозатором 18 без возможности относительного вращения. Этими стопорными выступами 118 захват 114 с геометрическим замыканием соединяется с дозатором 18. Захват 114 содержит отверстие 120, сквозь который проходит соединительная ножка 66 управляющего элемента 106. Как показано на ФИГ. 52 и 53, захват 114 содержит соединительный участок 119, на котором образованы приемные углубления 117 муфты 116. Свободный внутренний диаметр примыкающего к соединительному участку 119 с проксимальной стороны внутреннего пространства 110 выбирается настолько большим, чтобы соединительные выступы 104 (ФИГ. 46) могли свободно проворачиваться во внутреннем пространстве 110.
В показанном на ФИГ. 39-54 примере осуществления инъекционного устройства 101 пользователь не может выбирать скорость инъектирования; она определяется запасенной в пружине 9 энергией, вязкостью инъекционной жидкости, диаметром инъекционной иглы и трением пробки 10 о контейнер 5. В отличие от этого варианта осуществления, в случае инъекционного устройства 1 пользователь может выбирать скорость инъектирования, позиционируя соответствующим образом управляющий элемент 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2016 |
|
RU2687576C1 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2016 |
|
RU2698606C1 |
| ИНЪЕКЦИОННЫЙ АППАРАТ | 2015 |
|
RU2672523C1 |
| ИНЪЕКЦИОННЫЙ АППАРАТ | 2013 |
|
RU2615122C2 |
| ИНЪЕКЦИОННЫЙ АППАРАТ | 2015 |
|
RU2672682C1 |
| ИНЪЕКЦИОННЫЙ АППАРАТ | 2014 |
|
RU2626143C2 |
| ИНЪЕКЦИОННЫЙ АППАРАТ | 2015 |
|
RU2661755C1 |
| АВТОМАТИЧЕСКИЕ ИНЪЕКЦИОННЫЕ УСТРОЙСТВА, ИМЕЮЩИЕ НАФОРМОВАННЫЕ ПОВЕРХНОСТИ ЗАХВАТА | 2012 |
|
RU2602039C2 |
| АВТОМАТИЧЕСКИЕ ИНЪЕКЦИОННЫЕ УСТРОЙСТВА, ИМЕЮЩИЕ НАФОРМОВАННЫЕ ПОВЕРХНОСТИ ЗАХВАТА | 2012 |
|
RU2727040C2 |
| ЗАЩЕЛКА ДЛЯ ИНЪЕКЦИОННОГО УСТРОЙСТВА И ТРЕНИРОВОЧНОГО ИНЪЕКЦИОННОГО УСТРОЙСТВА | 2019 |
|
RU2806296C2 |










Изобретение относится к медицинской технике, а именно к инъекционным устройствам. Инъекционное устройство содержит корпус (2) и выполненный с возможностью вращения и жестко удерживаемый в корпусе (2) от перемещения в направлении продольной центральной оси (50) дозатор (18). Дозатор (18) соединен посредством первого резьбового соединения (19) с инъекционной гильзой (17), удерживаемой без возможности вращения относительно корпуса (2) и с возможностью перемещения в направлении продольной центральной оси (50). При установке подлежащей выдавливанию дозы инъекционной жидкости предусмотрена возможность вращения дозатора (18) относительно корпуса (2) и перемещения инъекционной гильзы (17) под действием первого резьбового соединения в дистальном направлении (30). При выдавливании установленной дозы инъекционной жидкости предусмотрена возможность перемещения инъекционной гильзы (17) в проксимальном направлении (31) и вращения дозатора (18) в противоположном направлении под действием первого резьбового соединения (19). Для обеспечения возможности автоматического выполнения инъекции, в инъекционном устройстве (1, 101) предусмотрена пружина (9), которая первым своим концом (70) упирается в инъекционную гильзу (17), а вторым концом (71) - в корпус (2), которая выполнена с возможностью - при выдавливании инъекционной жидкости - перемещения в проксимальном направлении (31) и осуществления тем самым выдавливания установленной дозы инъекционной жидкости. 12 з.п. ф-лы, 54 ил.
1. Инъекционное устройство, содержащее корпус (2) с продольной центральной осью (50) и выполненный с возможностью вращения и жестко удерживаемый в корпусе (2) от перемещения в направлении продольной центральной оси (50) дозатор (18), соединенный посредством первого резьбового соединения (19) с инъекционной гильзой (17), удерживаемой без возможности вращения относительно корпуса (2) и с возможностью перемещения в направлении продольной центральной оси (50), причем при установке подлежащей выдавливанию дозы инъекционной жидкости предусмотрена возможность вращения дозатора (18) относительно корпуса (2) и перемещения инъекционной гильзы (17) под действием первого резьбового соединения (19) в дистальном направлении (30), причем при выдавливании установленной дозы инъекционной жидкости предусмотрена возможность вращения дозатора (18) относительно корпуса (2) в противоположном направлении и перемещения инъекционной гильзы (17) под действием первого резьбового соединения (19) в проксимальном направлении (31), отличающееся тем, что инъекционное устройство (1) содержит пружину (9), которая упирается первым концом (70) в инъекционную гильзу (17), а вторым концом (71) - в корпус (2), и которая выполнена с возможностью - при выдавливании инъекционной жидкости - перемещения инъекционной гильзы (17) в проксимальном направлении (31) и осуществления тем самым выдавливания установленной дозы инъекционной жидкости.
2. Инъекционное устройство по п. 1, отличающееся тем, что пружина (9) выполнена в виде пружины сжатия.
3. Инъекционное устройство по п. 1 или 2, отличающееся тем, что пружина (9) опирается первым своим концом (70) на инъекционную гильзу (17), а вторым концом (71) - на корпус (2).
4. Инъекционное устройство по одному из пп. 1-3, отличающееся тем, что дозатор (18) расположен радиально внутри инъекционной гильзы (17).
5. Инъекционное устройство по п. 4, отличающееся тем, что пружина (9) расположена на наружной поверхности дозатора (18) и по меньшей мере частично в кольцевом пространстве (64), образованном между дозатором (18) и инъекционной гильзой (17).
6. Инъекционное устройство по п. 4 или 5, отличающееся тем, что корпус (2) содержит смотровое окно (7), а инъекционная гильза (17) имеет отверстие (26), которое расположено напротив смотрового окна (7), и сквозь которое видна шкала (59), расположенная на наружной поверхности дозатора (18), причем инъекционная гильза (17) содержит участок, который при максимально возможной установленной дозе закрывает проксимальную область смотрового окна (7).
7. Инъекционное устройство по п. 6, отличающееся тем, что участок, закрывающий проксимальную область смотрового окна (7), образован выступом (34) инъекционной гильзы (17), выступающим в проксимальном направлении (31).
8. Инъекционное устройство по п. 7, отличающееся тем, что инъекционное устройство (1) содержит контейнер (5) с инъекционной жидкостью, причем в радиальном направлении между контейнером (5) и верхней корпусной деталью (3) корпуса (2) образован карман (92), в который входит выступ (34) в нулевом положении (28) инъекционного устройства (1).
9. Инъекционное устройство по п. 7 или 8, отличающееся тем, что корпус (2) содержит корпусную стенку (87), на которой образована вращающаяся опора (21) для дозатора (18), причем выступ (34) проходит через сквозное отверстие (83) в корпусной стенке (87) на проксимальную сторону корпусной стенки (87).
10. Инъекционное устройство по одному из пп. 1-9, отличающееся тем, что во всех положениях инъекционного устройства (1) инъекционная гильза (17) полностью находится в корпусе (2) инъекционного устройства (1).
11. Инъекционное устройство по одному из пп. 1-10, отличающееся тем, что инъекционное устройство (1, 101) содержит управляющий элемент (6, 106), который при установке подлежащей выдавливанию дозы инъекционной жидкости соединен без возможности относительного вращения посредством первой муфты (16, 116) с дозатором (18), а при выдавливании установленной дозы инъекционной жидкости соединен без возможности относительного вращения посредством второй муфты (20) с корпусом (2) и имеет возможность вращения относительно дозатора (18).
12. Инъекционное устройство по п. 11, отличающееся тем, что управляющий элемент (6, 106) при установке дозы находится в дистальном конечном положении (90) и для разъединения первой муфты (16, 116) подлежит перемещению в проксимальном направлении (31).
13. Инъекционное устройство по одному из пп. 1-12, отличающееся тем, что инъекционное устройство (1, 101) содержит дозирующий поршень (11) для выдавливания инъекционной жидкости из контейнера (5), причем дозирующий поршень (11) посредством второго резьбового соединения (22) соединен с дозатором (18), при этом дозирующий поршень (11) при установке подлежащего выдавливанию количества инъекционной жидкости соединен без возможности относительного вращения с дозатором (18) и имеет возможность вращения с дозатором (18), а при выдавливании подлежащего выдавливанию количества инъекционной жидкости дозирующий поршень (11) соединен без возможности относительного вращения с корпусом (2) и имеет возможность перемещения в проксимальном направлении (31) под действием второго резьбового соединения (22).
| WO 2007071080 A1, 28.06.2007 | |||
| DE 102007026083 A1, 27.11.2008 | |||
| Зевообразующее устройство ткацкого станка | 1985 |
|
SU1326664A1 |
| EA 200501507 A1, 28.04.2006. | |||

