Область техники
[001] Настоящее изобретение относится к инъекционному устройству для введения инъекции и тренировочному инъекционному устройству для подготовки пользователя к применению инъекционного устройства.
Предпосылки создания изобретения
[002] При лечении пациентов требуется использовать оптимально простой и безопасный способ введения инъекций. Обычный шприц для введения инъекций включает цилиндр с лекарственным препаратом, поршень, соответствующий цилиндру, и иглу, через которую вводится лекарственный препарат при вдавливании поршня внутрь цилиндра. Как правило, шприц оснащен защитным колпачком. Он одевается на иглу, когда шприц не используется и снимается при введении инъекции.
[003] Специфическая проблема обычного шприца заключается в том, что пациент может случайно уколоться иглой перед введением инъекции. Другая специфическая проблема заключается в сложности надлежащего совмещения иглы с участком-мишенью, и, таким образом, инъекция может быть введена неправильно. Следовательно, использование обычных шприцов может вызывать сложность и потенциальную опасность, особенно для пациентов с нарушениями координации движений.
[004] Существуют инъекционные устройства, которые решают указанные проблемы, связанные с использованием обычных шприцев. Одно такое устройство включает в себя колпачок иглы и поршень, который можно активировать для введения лекарственного препарата из иглы в тело пациента. Колпачок иглы при прижатии к участку-мишени втягивается, обнажая иглу. Одновременно с этим действием можно нажимать на поршень для введения инъекции. Это позволяет делать инъекцию одним движением путем нажатия на поршень устройства, направленного на участок-мишень. Это позволяет пациенту делать инъекции безопасным и простым способом. Часто эти устройства выполнены таким образом, что их можно применять только один раз, например, путем блокировки колпачка иглы в положении, при котором после введения инъекции игла закрывается. Это предотвращает использование иглы более одного раза, обеспечивая соблюдение санитарно-гигиенических норм.
[005] Проблема с известными инъекционными устройствами заключается в том, что обучить пациента использованию этих устройств без фактического введения инъекции может быть трудно. Таким образом, надлежащее обучение может быть ограничено периодами, когда требуется инъекция. Кроме того, во время обучения введению инъекций можно использовать неактивное вещество. Однако из соображений, связанных с соблюдением норм здравоохранения и гигиены, следует избегать введений инъекций без необходимости.
[006] В свете вышеизложенного существует потребность в устройстве, которое можно применять для обучения пациента применению инъекционного устройства простым и безопасным способом. Кроме того, целесообразно, чтобы такое устройство было многоразового использования: с помощью одного и того же устройства можно было выполнить много обучающих процессов. Также существует потребность в простой конструкции и надежной работе инъекционного устройства.
Краткое описание
[007] В одном аспекте изобретения предложено тренировочное инъекционное устройство для обучения пользователя применению инъекционного устройства, которое включает корпусный участок, исполнительный механизм, расположенный к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального в дистальное положение, колпачок, расположенный по направлению к дистальному концу корпусного участка, причем колпачок выполнен с возможностью перемещения между исходным положением; отведенным положением, которое является более проксимальным относительно корпусного участка, чем при исходном положении; а также выдвинутым положением, которое является более дистальным относительно корпусного участка, чем при исходном положении, и фиксатор, выполненный с возможностью поворота между первой ориентацией, в которой он сопротивляется перемещению исполнительного механизма из проксимального положения в дистальное положение; и второй ориентацией, в которой фиксатор позволяет исполнительному механизму перемещаться из проксимального положения в дистальное положение. Первая ориентация фиксатора выполнена с возможностью удержания колпачка в исходном положении таким образом, что колпачок не может перемещаться из исходного в выдвинутое положение, а также позволяет колпачку перемещаться из исходного положения в отведенное положение. Колпачок выполнен с возможностью контакта с фиксатором при перемещении из исходного положения в отведенное положение, чтобы переместить фиксатор из первой ориентации во вторую. Перемещение исполнительного механизма на первое расстояние к дистальному положению разблокирует фиксатор колпачка таким образом, что колпачок сможет переместится в выдвинутое положение.
[008] Таким образом, тренировочное инъекционное устройство точно имитирует применение инъекционного устройства, что улучшает процесс обучения. Кроме того, пользователь может на практике делать инъекцию много раз по сравнению с ситуацией, в которой обучение возможно только при необходимости реальной инъекции. Фиксатор обеспечивает функционирование механизма для моделирования применения инъекционного устройства.
[009] В другом аспекте изобретения представлено инъекционное устройство, которое включает иглу, соединенную с камерой для хранения текучей среды, корпусный участок, исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального в дистальное положение для дозирования текучей среды, содержащейся в камере и подаваемой через иглу, колпачок, расположенный к дистальному концу корпусного участка, причем колпачок выполнен с возможностью перемещения между исходным положением, в котором колпачок закрывает иглу; отведенным положением, в котором колпачок открывает иглу, причем отведенное положение является более проксимальным относительно корпусного участка, чем исходное положение; а также выдвинутым положением, в котором колпачок закрывает иглу, причем выдвинутое положение является более дистальным относительно участка корпуса, чем исходное положение, причем фиксатор выполнен с возможностью поворота между первой ориентацией, в которой он сопротивляется перемещению исполнительного механизма из проксимального в дистальное положение; и второй ориентацией, в которой фиксатор позволяет исполнительному механизму перемещаться из проксимального положения в дистальное положение. Первая ориентация фиксатора выполнена с возможностью удержания колпачка в исходном положении таким образом, что колпачок не может перемещаться из исходного в выдвинутое положение, а также позволяет колпачку перемещаться из исходного положения в отведенное положение. Колпачок выполнен с возможностью контакта с фиксатором при перемещении из исходного положения в отведенное положение, чтобы переместить фиксатор из первой ориентации во вторую. Перемещение исполнительного механизма на первое расстояние к дистальному положению разблокирует фиксатор колпачка таким образом, что колпачок сможет переместиться в выдвинутое положение.
[010] Благодаря такой конструкции обеспечивается надежность и простота изготовления инъекционного устройства.
[011] В другом аспекте изобретения предлагается способ обучения пользователя применению инъекционного устройства, причем способ включает предоставление тренировочного инъекционного устройства, которое содержит корпусный участок, исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, исполнительный механизм, выполненный с возможностью перемещения из проксимального в дистальное положение, колпачок расположенный по направлению к дистальному концу корпусного участка, причем колпачок выполнен с возможностью перемещения между исходным положением; отведенным положением, которое является более проксимальным относительно корпусного участка, чем при исходном положении; а также выдвинутым положением, которое является более дистальным относительно корпусного участка, чем при исходном положении, и фиксатор, выполненный с возможностью поворота между первой ориентацией, в которой он сопротивляется перемещению исполнительного механизма из проксимального положения в дистальное положение; и второй ориентацией, в которой фиксатор позволяет исполнительному механизму перемещаться из проксимального положения в дистальное положение. Первая ориентация фиксатора выполнена с возможностью удержания колпачка в исходном положении таким образом, что колпачок не может перемещаться из исходного в выдвинутое положение, а также позволяет колпачку перемещаться из исходного положения в отведенное положение. Способ дополнительно включает перемещение колпачка из исходного положения в отведенное положение таким образом, что колпачок контактирует с фиксатором, перемещая его из первой ориентации во вторую ориентацию, и перемещение исполнительного механизма на первое расстояние к дистальному положению для разблокировки фиксатора колпачка таким образом, что он перемещается в направлении выдвинутого положения.
[012] В другом аспекте изобретения предложен способ введения инъекции, который включает предоставление инъекционного устройства, состоящего из иглы, соединенной с камерой для хранения текучей среды, корпусного участка, исполнительного механизма, расположенного по направлению к проксимальному концу корпусного участка и выполненного с возможностью перемещения из проксимального в дистальное положение для дозирования текучей среды, содержащейся в камере и подаваемой через иглу, колпачка, расположенного к дистальному концу корпусного участка, причем колпачок выполнен с возможностью перемещения между исходным положением, в котором колпачок закрывает иглу; отведенным положением, в котором колпачок открывает иглу, причем отведенное положение является более проксимальным относительно корпусного участка, чем исходное положение; а также выдвинутым положением, в котором колпачок закрывает иглу, причем выдвинутое положение является более дистальным относительно участка корпуса, чем исходное положение, причем фиксатор выполнен с возможностью поворота между первой ориентацией, в которой он сопротивляется перемещению исполнительного механизма из проксимального в дистальное положение; и второй ориентацией, в которой фиксатор позволяет исполнительному механизму перемещаться из проксимального положения в дистальное положение. Первая ориентация фиксатора выполнена с возможностью удержания колпачка в исходном положении таким образом, что колпачок не может перемещаться из исходного в выдвинутое положение, а также позволяет колпачку перемещаться из исходного положения в отведенное положение. Способ дополнительно включает перемещение колпачка из исходного положения в отведенное положение таким образом, что колпачок контактирует с фиксатором, перемещая его из первой ориентации во вторую ориентацию, и перемещение исполнительного механизма на первое расстояние к дистальному положению для разблокировки фиксатора колпачка таким образом, что колпачок перемещается в направлении выдвинутого положения.
[013] В другом аспекте изобретения предлагается тренировочное инъекционное устройство для обучения пользователя применению инъекционного устройства, которое включает корпусный участок и исполнительный механизм, расположенный к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение. Корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, таким образом удерживая исполнительный механизм в дистальном положении.
[014] Таким образом, соединение защелки с выступом корпуса свидетельствует о том, что исполнительный механизм достиг дистального положения. Это моделирует окончание процесса введения инъекции с помощью инъекционного устройства. Это позволит пользователю обучиться определять, правильно ли сделана инъекция.
[015] В другом аспекте изобретения предлагается инъекционное устройство, которое включает иглу, соединенную с камерой для хранения текучей среды, корпусный участок и исполнительный механизм, расположенный к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, находящейся в камере, через иглу. Корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, таким образом удерживая исполнительный механизм в дистальном положении.
[016] Таким образом, соединение защелки с выступом корпуса свидетельствует о том, что исполнительный механизм достиг дистального положения. Это указывает на окончание процесса введения инъекции с помощью инъекционного устройства. Это позволит пользователю обучиться более точному определению, правильно ли сделана инъекция.
[017] В другом аспекте изобретения предлагается тренировочное инъекционное устройство для обучения пользователя применению инъекционного устройства, которое включает корпусный участок и исполнительный механизм, расположенный к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение. Корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и воспроизведения звукового сигнала.
[018] Таким образом, звуковой сигнал указывает на то, что исполнительный механизм достиг дистального положения, которое моделирует окончание процесса введения инъекции с помощью инъекционного устройства. Это позволит пользователю обучиться определять, правильно ли сделана инъекция. Интенсивность звукового сигнала позволяет пользователю услышать его на расстоянии 1 м от устройства или, по меньшей мере, на расстоянии вытянутой руки от устройства. Защелка может быть выполнена с возможностью воспроизведения звукового сигнала выше заданного порога интенсивности на определенном расстоянии от устройства (например, 30 см). Например, заданный порог интенсивности может составлять 40 дБ таким образом, что звук будет выше стандартного уровня в условиях тихой комнаты. Это позволяет пользователю слышать звук в нормальных условиях рабочей среды. Заданная пороговая интенсивность может составлять 50 дБ, 60 дБ или даже 70 дБ, чтобы гарантировать, что пользователь сможет слышать звук в различных условиях окружающей среды. Звуковой сигнал может быть «щелчком», который представляет собой короткий звуковой сигнал (продолжительностью, например, менее секунды). Звуковой сигнал воспроизводится вследствие механического взаимодействия защелки и выступа корпуса без участия электронных устройств.
[019] В другом аспекте изобретения предлагается инъекционное устройство, которое включает иглу, соединенную с камерой для хранения текучей среды, корпусный участок и исполнительный механизм, расположенный по направлению к проксимальному концу участка корпуса, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, содержащейся в камере, через иглу. Корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и воспроизведения звукового сигнала.
[020] Таким образом, звуковой сигнал указывает, что исполнительный механизм достиг дистального положения. Это указывает на завершение процесса введения инъекции с помощью инъекционного устройства. Это позволит пользователю обучиться более точному определению, правильно ли сделана инъекция.
[021] В другом аспекте изобретения предлагается способ обучения пользователя применению инъекционного устройства, которое содержит предоставление тренировочного инъекционного устройства, содержащего корпусный участок и исполнительный механизм, расположенный к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение. Корпусный участок оснащен выступом, а исполнительный механизм - защелкой. Способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение таким образом, что защелка соединяется с выступом корпуса, когда исполнительный механизм находится в дистальном положении, удерживая исполнительный механизм в дистальном положении.
[022] В другом аспекте изобретения предлагается способ введения инъекции, который включает предоставление инъекционного устройства, содержащего иглу, соединенную с камерой для хранения текучей среды, корпусный участок и исполнительный механизм, расположенный по направлению к проксимальному концу участка корпуса, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, содержащейся в камере, через иглу. Корпусный участок оснащен выступом, а исполнительный механизм - защелкой. Способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение таким образом, что защелка соединяется с выступом корпуса, когда исполнительный механизм находится в дистальном положении, удерживая исполнительный механизм в дистальном положении.
[023] В другом аспекте изобретения предлагается способ обучения пользователя применению инъекционного устройства, которое содержит предоставление тренировочного инъекционного устройства, содержащего корпусный участок и исполнительный механизм, расположенный к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение. Корпусный участок оснащен выступом, а исполнительный механизм - защелкой. Способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение так, чтобы защелка контактировала с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и воспроизводила звуковой сигнал.
[024] В другом аспекте изобретения предлагается способ введения инъекции, который включает предоставление инъекционного устройства, содержащего иглу, соединенную с камерой для хранения текучей среды, корпусный участок и исполнительный механизм, расположенный по направлению к проксимальному концу участка корпуса, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, содержащейся в камере, через иглу. Корпусный участок оснащен выступом, а исполнительный механизм - защелкой. Способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение так, чтобы защелка контактировала с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и воспроизводила звуковой сигнал.
[025] В другом аспекте изобретения предложено тренировочное инъекционное устройство для обучения пользователя применению инъекционного устройства, которое содержит корпусный участок, исполнительный механизм, расположенный к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального в дистальное положение, колпачок, расположенный по направлению к дистальному концу корпусного участка, причем колпачок выполнен с возможностью перемещения между исходным положением; выдвинутым положение, которое является более дистальным относительно корпусного участка, по сравнению с исходным положением, и соединитель, который соединяет исполнительный механизм с колпачком таким образом, что перемещение исполнительного механизма из дистального положения в проксимальное положение приводит к вытягиванию колпачка из выдвинутого положения в исходное положение.
[026] Таким образом, можно возвращать тренировочное инъекционное устройство в исходное положение для повторного использования. Соединитель обеспечивает работу механизма для выполнения этой функции.
[027] В другом аспекте изобретения представлено инъекционное устройство, которое содержит иглу, соединенную с камерой для хранения текучей среды, корпусный участок, исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального в дистальное положение для дозирования текучей среды, содержащейся в камере и подаваемой через иглу, колпачок, расположенный к дистальному концу корпусного участка, причем колпачок выполнен с возможностью перемещения между исходным положением, в котором колпачок закрывает иглу; отведенным положением, в котором колпачок открывает иглу, причем отведенное положение является более проксимальным относительно корпусного участка, чем исходное положение; и выдвинутым положением, в котором колпачок закрывает иглу, причем выдвинутое положение является более дистальным относительно корпусного участка, чем исходное положение, и соединитель, который соединяет исполнительный механизм с колпачком таким образом, что перемещение исполнительного механизма из дистального положения к проксимальному положению приводит к вытягиванию колпачка из выдвинутого положения в исходное положение.
[028] Таким образом, возможность возврата инъекционного устройства в исходное положение позволяет использовать его более одного раза. Соединитель обеспечивает работу механизма для выполнения этой функции.
[029] В другом аспекте изобретения предлагается способ обучения пользователя применению инъекционного устройства, причем способ включает предоставление тренировочного инъекционного устройства, которое содержит корпусный участок, исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, исполнительный механизм, выполненный с возможностью перемещения из проксимального в дистальное положение, колпачок, расположенный по направлению к дистальному концу корпусного участка, причем колпачок выполнен с возможностью перемещения между исходным положением; выдвинутым положением, которое является более дистальным по отношению к корпусного участка, чем исходное положение, и соединитель, который соединяет исполнительный механизм с колпачком. Способ дополнительно включает перемещение исполнительного механизма из дистального положения в проксимальное положение для вытягивания колпачка из выдвинутого положения в исходное положение с помощью соединителя.
[030] В другом аспекте изобретения предложен способ введения инъекции, включающий предоставление инъекционного устройства, содержащего иглу, соединенную с камерой для хранения текучей среды, корпусный участок, исполнительный механизм, расположенный к проксимальному концу корпусного участка, исполнительный механизм, выполненный с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, содержащейся в камере, через иглу, колпачок, расположенный к дистальному концу участка корпуса, причем колпачок выполнен с возможностью перемещения между исходным положением, в котором колпачок закрывает иглу; отведенным положением, в котором колпачок открывает иглу, причем отведенное положение является более проксимальным относительно корпусного участка, чем исходное положение; и выдвинутым положением, в котором колпачок закрывает иглу, причем выдвинутое положение является более дистальным по отношению к корпусному участку, чем исходное положение, и соединитель, который соединяет исполнительный механизм с колпачком. Способ дополнительно включает перемещение исполнительного механизма из дистального положения в проксимальное положение для вытягивания колпачка из выдвинутого положения в исходное положение с помощью соединителя.
[031] В другом аспекте изобретения предлагается способ введения инъекции, который включает предоставление инъекционного устройства, состоящего из иглы, соединенной с камерой для хранения текучей среды, корпусного участка, исполнительного механизма, расположенного по направлению к проксимальному концу корпусного участка и выполненного с возможностью перемещения из проксимального в дистальное положение для дозирования текучей среды, содержащейся в камере и подаваемой через иглу, колпачка, расположенного к дистальному концу корпусного участка, причем колпачок выполнен с возможностью перемещения между исходным положением, в котором колпачок закрывает иглу;
[032] Таким образом, тренировочное инъекционное устройство может имитировать сопротивление, оказываемое лекарственным препаратом в инъекционном устройстве при нажатии на исполнительный механизм.
[033] В другом аспекте изобретения представлено инъекционное устройство, которое содержит иглу, соединенную с камерой для хранения текучей среды в корпусного участка, узел исполнительного механизма, расположенный к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, содержащейся в камере, через иглу, причем узел исполнительного механизма соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора и демпфирующий элемент, соединенный или выполненный с возможностью соединения с ротором, чтобы замедлять его вращение.
[034] Таким образом, инъекционное устройство может замедлять продвижение исполнительного механизма к дистальному положению, что обеспечивает, что жидкость не будет подаваться из иглы слишком быстро.
[035] В другом аспекте изобретения предлагается способ обучения пользователя применению инъекционного устройства, который включает предоставление тренировочного устройства, содержащего корпусный участок, узел исполнительного механизма, расположенный к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение, причем узел исполнительного механизма соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора, и демпфирующий элемент, соединенный или выполненный с возможностью соединения с ротором, чтобы замедлять его вращение. Способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение, в течение которого демпфирующий элемент замедляет вращение ротора и, следовательно, перемещение исполнительного механизма в дистальное положение.
[036] В другом аспекте изобретения предлагается способ введения инъекции, который включает предоставление инъекционного устройства, содержащего иглу, соединенную с камерой для хранения текучей среды в корпусного участка, узел исполнительного механизма, расположенный к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, содержащейся в камере, через иглу, причем узел исполнительного механизма соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора и демпфирующий элемент, соединенный или выполненный с возможностью соединения с ротором, чтобы замедлять его вращение. Способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение, в течение которого демпфирующий элемент замедляет вращение ротора и, следовательно, перемещение исполнительного механизма в дистальное положение.
[037] Фиксатор может содержать поверхность сопротивления исполнительного механизма, которая выполнена с возможностью сопротивления перемещению исполнительного механизма из проксимального положения в дистальное положение, когда фиксатор находится в первой ориентации. Поверхность сопротивления исполнительного механизма может включать выступ, отходящий от фиксатора. Исполнительный механизм может включать опорную поверхность, которая расположена с возможностью упора в поверхность сопротивления исполнительного механизма, когда исполнительный механизм находится в проксимальном положении, а фиксатор находится в первой ориентации. Опорная поверхность может включать выступ, отходящий от исполнительного механизма. Фиксатор может содержать по меньшей мере две (или пару) поверхности сопротивления исполнительного механизма. Пара поверхностей сопротивления исполнительного механизма может быть расположена на противоположных сторонах фиксатора относительно друг друга. Исполнительный механизм может включать по меньшей мере две (или пару) опорные поверхности. Пара опорных поверхностей может быть расположена на противоположных сторонах исполнительного механизма относительно друг друга. Данный простой и надежный механизм позволяет распределять усилие, оказываемое исполнительным механизмом на фиксатор, по его диаметру.
[038] Фиксатор может включать цилиндрический корпус, а поверхность сопротивления исполнительного механизма может включать выступ, который выступает вперед с поверхности цилиндрического корпуса. Выступ может только частично охватывать окружность цилиндрического корпуса. Фиксатор может включать уклон. Колпачок может включать наклонный контактный элемент. Наклонный контактный элемент колпачка может быть выполнен с возможностью взаимодействия с наклонной поверхностью фиксатора при перемещении из исходного положения в отведенное положение для поворота фиксатора из первой ориентации во вторую ориентацию. Это обеспечивает простой и надежный механизм для поворота фиксатора во вторую ориентацию.
[039] Фиксатор может включать третью ориентацию, в которой колпачок может перемещаться из исходного положения в выдвинутое положение. Исполнительный механизм может быть выполнен с возможностью перемещения на первое расстояние, чтобы переместить фиксатор в третью ориентацию. Таким образом, колпачок не может перемещаться в выдвинутое положение до тех пор, пока исполнительный механизм не будет по меньшей мере частично нажат. Выдвинутое положение имитирует состояние блокировки инъекционного устройства, которое указывает на завершение процесса введения инъекции. Таким образом, тренировочное устройство не может имитировать завершение процесса введения инъекции до тех пор, пока исполнительный механизм не будет активирован пользователем.
[040] Фиксатор может включать ограничитель, который расположен внутри выемки колпачка, таким образом удерживая его в исходном положении. Это обеспечивает простой и надежный механизм удержания колпачка в исходном положении.
[041] Ограничитель может быть выполнен с возможностью перемещения вдоль прорези в колпачке, чтобы обеспечивать его перемещение в выдвинутое положение. Ограничитель может находиться за пределами прорези в выемке, тем самым удерживая колпачок в исходном положении, когда фиксатор находится в первой ориентации. Таким образом, ограничитель может использоваться для обеспечения перемещения колпачка из исходного положения в выдвинутое положение при перемещении ограничителя из выемки в прорезь.
[042] В одном варианте осуществления изобретения перемещение фиксатора из второй ориентации в третью с помощью исполнительного механизма толкает ограничитель в паз, что позволяет колпачку перемещаться из исходного положения в выдвинутое положение. Таким образом, колпачок может перемещаться в выдвинутое положение путем нажатия на исполнительный механизм.
[043] Ограничитель может быть соединен с упругим элементом, который выполнен с возможностью изгиба, чтобы перемещать упор внутрь из состояния покоя по направлению к продольной оси тренировочного устройства в изогнутое состояние. Ограничитель в состоянии покоя удерживает колпачок в исходном положении. Ограничитель в изогнутом состоянии позволяет ограничителю перемещаться в паз. Это обеспечивает надежный механизм, позволяющий колпачку перемещаться из исходного положения в выдвинутое положение.
[044] Тренировочное устройство может включать смещающий элемент, который смещает колпачок в дистальном направлении. Таким образом, колпачок может автоматически перемещаться из отведенного положения в исходное или выдвинутое положение в зависимости от ориентации фиксатора.
[045] Поверхность сопротивления исполнительного механизма фиксатора может включать дефлекторный участок. Исполнительный механизм может быть выполнен с возможностью взаимодействия с дефлекторным участком для перемещения фиксатора из второй ориентации в третью. Таким образом, исполнительный механизм толкает вниз дефлекторный участок, чтобы переместить фиксатор в ориентацию, которая позволяет колпачку перемещаться в выдвинутое положение.
[046] Тренировочное устройство может включать смещающий элемент, выполненный с возможностью смещения фиксатора в первом направлении вращения. Смещающий элемент может включать торсионную пружину. Смещающий элемент может смещать фиксатор для поворота от второго или третьего положения к первому. Таким образом, тренировочное устройство можно вернуть в исходное состояние автоматически.
[047] Смещающий элемент может смещать фиксатор в четвертую ориентацию таким образом, что, как только исполнительный механизм переместится к дальнему положению, а колпачок будет находится в выдвинутом положении, фиксатор переместится в четвертую ориентацию. Фиксатор в четвертой ориентации может предотвращать перемещение колпачка из выдвинутого положения в исходное. Таким образом, колпачок может автоматически устанавливаться в заблокированное состояние после нажатия исполнительного механизма.
[048] Исполнительный механизм может быть выполнен с возможностью блокирования фиксатора при перемещении из дистального положения в проксимальное, чтобы переместить фиксатор в первую ориентацию, таким образом позволяя колпачку перемещаться из выдвинутого положения в исходное. Это позволяет пользователю вернуть тренировочное устройство в исходное состояние, перемещая исполнительный механизм обратно в проксимальное положение из дистального положения.
[049] Фиксатор может включать колпачок с поверхностью сопротивления, которая выполнена с возможностью сопротивления проксимальному перемещению колпачка в проксимальном направлении, когда фиксатор находится в четвертой ориентации, а колпачок находится в выдвинутом положении. Колпачок может включать опорную поверхность, которая упирается в поверхность сопротивления колпачка, когда фиксатор находится в четвертой ориентации, а колпачок находится в выдвинутом положении. Это способствует удерживанию колпачка в заблокированном состоянии.
[050] В варианте осуществления изобретения проксимальное положение исполнительного механизма моделирует неактивированное положение поршня инъекционного устройства. В варианте осуществления изобретения дистальное положение исполнительного механизма моделирует активированное положение поршня инъекционного устройства. В варианте осуществления изобретения исходное положение колпачка моделирует обнажение иглы инъекционного устройства. В варианте осуществления изобретения втянутое положение колпачка моделирует обнажение иглы инъекционного устройства. В варианте осуществления изобретения выдвинутое положение колпачка моделирует состояние блокировки инъекционного устройства, в котором колпачок не может предотвращать обнажение иглы. Таким образом, тренировочное устройство может точно моделировать работу инъекционного устройства.
[051] Защелка может быть выполнена таким образом, чтобы звуковой сигнал при соединении с выступом корпуса, указывал на то, что исполнительный механизм находится в дистальном положении. Звуковой сигнал указывает на то, что исполнительный механизм достиг дистального положения, которое моделирует процесс окончания введения инъекции с помощью инъекционного устройства, так что пользователь может более точно определить, была ли инъекция введена надлежащим способом при применении инъекционного устройства.
[052] Защелка может быть выполнена с возможностью удержания исполнительного механизма в дистальном положении, когда она соединена с выступом корпуса. Соединение защелки с выступом корпуса указывает на то, что исполнительный механизм достиг дистального положения, которое имитирует окончание процесса введения инъекции с помощью инъекционного устройства, так что пользователь может более точно определить, что инъекция, введенная с использованием инъекционного устройства, сделана правильно.
[053] Защелка может включать упругий элемент. Защелка может перемещаться между разъединенным положением, в котором она не соединена с выступом корпуса, и соединенным положением, в котором защелка соединена с выступом корпуса. Следовательно, защелку можно просто согнуть, чтобы она могла соединиться с корпусным участком.
[054] Упругий элемент может быть выполнен с возможностью перехода из соединенного состояния в разъединенное, когда к исполнительному механизму прилагается сила, превышающая пороговое значение, при перемещении исполнительного механизма из дальнего положения в ближнее. Таким образом, защелка может надежно удерживать исполнительный механизм в дистальном положении, позволяя тренировочному устройству возвращаться в его исходное положение, когда пользователь целенаправленно прикладывает превышающее порог усилие на исполнительный механизм.
[055] Защелка может включать дефлекторный участок, который выполнен с возможностью стыковки с выступом корпуса для перемещения защелки из разъединенного положения в соединенное положение. Защелка может включать захватывающий элемент, который захватывает корпусный участок в соединенном положении. Таким образом, дефлекторный участок помогает перемещать защелку в соединение с корпусом, а элемент-захват помогает удерживать фиксатор и корпус в соединении друг с другом.
[056] Упругий элемент может включать дефлекторный участок и (или) захватный элемент. Противоположные стороны защелки могут включать как дефлекторный участок, так и захватывающий элемент. Это обеспечивает надежную конструкцию защелки.
[057] Соединитель может препятствовать перемещению колпачка в дистальном направлении от исходного положения, когда исполнительный механизм находится в проксимальном положении. Таким образом, соединитель помогает поддерживать колпачок в исходном положении.
[058] Соединитель может обеспечивать перемещение колпачка в отведенное положение, когда исполнительный механизм находится в проксимальном положении. Таким образом, соединитель не препятствует втягиванию колпачка в отведенное положение.
[059] Соединитель может позволять колпачку перемещаться дистально к выдвинутому положению при перемещении исполнительного механизма к дистальному положению. Таким образом, соединитель может служить для снятия колпачка.
[060] Соединитель может быть оснащен контактной поверхностью исполнительного механизма, которая упирается в участок исполнительного механизма, для предотвращения перемещения колпачка в дистальном направлении от исходного положения, когда исполнительный механизм находится в проксимальном положении. Упор контактной поверхности исполнительного механизма и исполнительный механизм обеспечивают функционирование механизма удержания колпачка в исходном положении.
[061] Контактная поверхность исполнительного механизма может примыкать к поверхности исполнительного механизма, которая обращена в проксимальном направлении. Соединитель может перемещать колпачок в дистальном направлении от исходного положения, когда исполнительный механизм находится в проксимальном положении.
[062] Соединитель может быть оснащен контактной поверхностью колпачка, которая упирается в участок колпачка, для предотвращения перемещения колпачка в дистальном направлении от исходного положения, когда исполнительный механизм находится в проксимальном положении. Это обеспечивает функционирование механизма удержания колпачка в исходном положении.
[063] Контактная поверхность колпачка может примыкать к поверхности колпачка, которая обращена в дистальном направлении. Таким образом, соединитель может перемещать колпачок при перемещении исполнительного механизма в проксимальном направлении, но не может перемещать колпачок при перемещении в дистальном направлении.
[064] В другом аспекте изобретения предлагается набор компонентов, выполненных с возможностью сборки тренировочного инъекционного устройства или инъекционного устройства, описанных в настоящем документе.
Краткое описание графических материалов
[065] Варианты осуществления изобретения описаны в качестве примера со ссылкой на прилагаемые чертежи, на которых:
[066] На Фиг. 1 представлено тренировочное инъекционное устройство для обучения пользователя применению инъекционного устройства;
[067] На Фиг. 2A представлен колпачок, прикрепленный к дистальному концу инструктора инъекционного устройства;
[068] На Фиг. 2B представлено тренировочное инъекционное устройство с исполнительным механизмом в проксимальном положении и колпачком в исходном положении.
[069] На Фиг. 2C представлен исполнительный механизм в проксимальном положении и колпачок в отведенном положении;
[070] На Фиг. 2D представлен исполнительный механизм, перемещенный в дистальном направлении из проксимального положения и колпачок в отведенном положении.
[071] На Фиг. 2E представлен исполнительный механизм в дистальном положении и колпачок в отведенном положении.
[072] На Фиг. 3A представлен исполнительный механизм в дистальном положении и колпачок в выдвинутом положении.
[073] На Фиг. 3B представлен исполнительный механизм при его перемещении в проксимальном направлении к дистальному положению и колпачок в выдвинутом положении;
[074] На Фиг. 3C представлен исполнительный механизм в дистальном положении и колпачок в исходном положении;
[075] На Фиг. 4 представлено тренировочное инъекционное устройство в разобранном виде;
[076] На Фиг. 5A представлены внутренние компоненты тренировочного инъекционного устройства с исполнительным механизмом в проксимальном положении и колпачок в исходном положении - вид сбоку;
[077] На Фиг. 5B представлены внутренние компоненты тренировочного инъекционного устройства с исполнительным механизмом в проксимальном положении и колпачком в исходном положении - вид в перспективе;
[078] На Фиг. 6 представлены компоненты внутреннего участка колпачка и фиксатор в разобранном виде;
[079] На Фиг. 7A представлены внутренние компоненты тренировочного инъекционного устройства с исполнительным механизмом в проксимальном положении и колпачок в отведенном положении - вид сбоку;
[080] На Фиг. 7B представлены внутренние компоненты тренировочного инъекционного устройства с исполнительным механизмом в проксимальном положении и колпачком в отведенном положении - вид в перспективе;
[081] На Фиг. 8 представлены внутренние компоненты тренировочного инъекционного устройства с исполнительным механизмом в дистальном положении и колпачком в выдвинутом положении - вид в перспективе;
[082] На Фиг. 9 представлено тренировочное инъекционное устройство с соединителем в разобранном виде;
[083] На Фиг. 10 представлено тренировочное инъекционное устройство с защелкой в разобранном виде; и
[084] На Фиг. 11A представлены внутренние компоненты тренировочного инъекционного устройства и демпфирующий элемент - вид сбоку; и
[085] На Фиг. 11B представлены внутренние компоненты тренировочного инъекционного устройства и демпфирующий элемент представлен - вид в перспективе.
[086] На Фиг. 12A представлен ротор - вид в перспективе.
[087] На Фиг. 12B представлен ротор, на котором видны угловые зубцы - вид сверху.
[088] На Фиг. 12C представлен ротор - вид снизу.
[089] На Фиг. 13A представлен ротор - вид сбоку.
[090] На Фиг. 13B представлена линия A-A - в разрезе.
[091] На Фиг. 14 A представлен ротор - вид со второй стороны.
[092] На Фиг. 14 B представлена линия B-B - вид в разрезе.
[093] На Фиг. 15 представлен ротор и демпфирующий элемент в полностью сцепленном состоянии - вид с боку.
Подробное описание
[094] Для обучения пользователя применению инъекционного устройства предлагается тренировочное инъекционное устройство 1, как показано на Фиг. 1. Тренировочное устройство 1 содержит корпусный участок 3 с проксимальным концом 5 и дистальным концом 7.
[095] При применении дистальный конец 7 корпусного участка 3 расположен по направлению к поверхности тела пользователя, которое представляет собой участок-мишень для введения инъекции. При применении проксимальный конец 5 корпусного участка 3 располагается в направлении руки пользователя, которой он активирует тренировочное устройство 1. На каждой стороне корпусного участка 3 расположено окошко 12, которое моделирует окошко инъекционного устройства для контроля за лекарственным препаратом, содержащимся в устройстве.
[096] Несмотря на то, что термины «проксимальный» и «дистальный» используются в настоящем документе для описания устройства, они обеспечивают контекст и не требуют применения тренировочного устройства 1 в какой-либо конкретной ориентации. Термины «первый конец» и «второй конец» можно использовать вместо терминов «дистальный конец» и «проксимальный конец» без изменения предполагаемого значения.
[097] Тренировочное инъекционное устройство 1 также содержит исполнительный механизм 9 и колпачок 11. Исполнительный механизм 9 моделирует поршень инъекционного устройства, который применяется для дозирования лекарственного препарата через иглу. Колпачок 11 моделирует колпачок иглы инъекционного устройства, который используется для закрытия и обнажения иглы.
[098] Тренировочное устройство 1 оснащено съемной крышкой 13, которую можно расположить поверх колпачка 11 для предотвращения случайного отведения колпачка 11. На внутренней поверхности крышки 13 расположена пара выемок 15. Эти выемки 15 размещены с возможностью расположения поверх пары выступающих участков 17 на внешней поверхности дистального конца 7 корпусного участка 3. При этом колпачок 13 удерживается на месте. Дистальный конец 7 корпусного участка 3 также содержит пару узлов 19 на противоположных сторонах каждой выемки 15, которые упираются в поверхность колпачка 11, предотвращая дальнейшее продвижение колпачка 11 к проксимальному концу 5 после того, как выемки 15 вошли в выступающие участки 17.
[099] Элементы тренировочного инъекционного устройства 1, описанного в настоящем документе, могут быть идентичными или по существу идентичными элементам инъекционного устройства, использованию которого необходимо обучится. Однако тренировочное инъекционное устройство 1 не содержит иглу, таким образом во время процедуры обучения пользователь не осуществляет инъекцию. Несмотря на то, что тренировочное инъекционное устройство 1 может содержать контейнер, который имитирует сосуд инъекционного устройства для лекарственного препарата, в нем не содержится какой-либо текучей среды.
[0100] Как показано на Фиг. 2 A-E, существует последовательность обучения пользователя введению инъекции с использованием тренировочного инъекционного устройства 1. Как можно видеть, на Фиг. 2A представлено тренировочное устройство 1 согласно описанию на Фиг. 1. На Фиг. 2B представлено тренировочное устройство 1 со снятой крышкой 13, которая открывает доступ к колпачку 11. Как показано на Фиг. 2B, колпачок 11 находится в исходном положении, которое имитирует положение колпачка иглы инъекционного устройства, в котором игла закрыта.
[0101] Как показано на Фиг. 2C, пользователь может держать тренировочное устройство 1 за исполнительный механизм 9 и расположить колпачок 11 поверх участка-мишени. Затем пользователь может нажать на исполнительный механизм 9 по направлению к дистальному концу 7 корпусного участка 3. Это позволит перевести колпачок 11 в отведенное положение и переместит его в направлении проксимального конца 5. Когда колпачок 11 находится в исходном положении, исполнительный механизм 9 не может перемещаться к дистальному концу 7 относительно корпусного участка 3. Таким образом, исполнительный механизм 9 удерживается в проксимальном положении и не может выдвигаться вперед. Однако после того как колпачок 11 оказывается в отведенном положении, исполнительный механизм 9 может перемещаться в дистальном направлении вдоль продольной оси тренировочного устройства 1.
[0102] На Фиг. 2C изображен колпачок 11 в отведенном назад положении, которое является более проксимальным по отношению к корпусному участку 3, чем исходное положение. Колпачок 11 в отведенном положении частично втягивается внутрь корпусного участка 3. Это положение моделирует положение колпачка иглы инъекционного устройства, в котором игла обнажена для введения инъекции.
[0103] Как показано на Фиг. 2D и 2E, исполнительный механизм 9 может перемещаться в дистальном направлении, как только колпачок 11 оказывается в отведенном положении. На Фиг. 2D представлен исполнительный механизм 9, продвигающийся по направлению к дистальному концу 7. На Фиг. 2E представлен исполнительный механизм 9 в дистальном положении, который имитирует положение поршня инъекционного устройства после введения инъекции.
[0104] На Фиг. 3A-C представлена последовательность возврата тренировочного устройства 1 в исходное положение после завершения моделирования введения инъекции. Как показано на Фиг. 3A, пользователь может убрать тренировочное устройство 1 с участка-мишени. Это позволит колпачку 11 перемещаться дистально в выдвинутое положение, которое является более дистальным по отношению к корпусной части 3, чем исходное и отведенное положение. Выдвинутое положение колпачка 11 имитирует заблокированное состояние инъекционного устройства, в котором невозможно обнажить колпачок иглы инъекционного устройства.
[0105] Как показано на Фиг. 3B-C, пользователь может нажать на исполнительный механизм 9 по направлению к проксимальному концу 5 для возврата тренировочного устройства 1 в исходное положение так, чтобы можно было повторить последовательность, описанную на Фиг. 2A-E. На Фиг. 3B представлен исполнительный механизм 9, продвигающийся к проксимальному положению, а на Фиг. 3 C представлен исполнительный механизм 9 в проксимальном положении. При втягивании исполнительного механизма 9 в проксимальное положение колпачок 11 возвращается в исходное положение, так что тренировочное устройство 1 может повторно использоваться.
[0106] На Фиг. 4 представлены компоненты тренировочного устройства 1 в разобранном виде. Корпусный участок 3 содержит часть основания 21, которая соединяется с частью основания 23, заключенной в первую внешнюю часть 25 и вторую внешнюю часть 27. В этом примере составные части корпусного участка 3 совмещаются друг с другом, образуя узел корпуса. Однако корпусный участок 3 может представлять собой цельную деталь.
[0107] Колпачок 11 тренировочного устройства 1 содержит внешний участок 29 и внутренний участок 31. Внешний участок 29 проходит от части основания 21, в то время как внутренний участок 31 находится внутри корпусного участка 3. Также предусмотрена пружина 33, которая выполняет функцию смещающего элемента для выталкивания колпачка 11 в дистальном направлении.
[0108] Исполнительный механизм 9 тренировочного устройства 1 содержит корпус исполнительного механизма 35 и торцевую крышку 37. Эти компоненты образуют внешнюю поверхность, с которой пользователь может взаимодействовать для перемещения исполнительного механизма 9. Внутренняя часть 39 исполнительного механизма 9 находится внутри корпуса исполнительного механизма 35 под торцевой крышкой 37. Внутренний элемент 39 соединяется с резьбовым поршнем 41 на проксимальном конце поршня 41, а дистальный конец поршня 41 соединяется с наконечником 43, который удерживает поршень 41 в совмещенном положении с продольной осью тренировочного устройства 1. В данном примере составные части исполнительного механизма 9 соединяются вместе, образуя узел исполнительного механизма. Однако исполнительный механизм 9 может представлять собой цельную деталь.
[0109] Поршень 41 соединен с демпфирующим элементом 45, который используется для замедления вращения поршня 41, который, в свою очередь, замедляет движение исполнительного механизма 9 в дистальном направлении.
[0110] Тренировочное устройство 1 дополнительно содержит фиксатор 47, содержащий первый фиксирующий участок 51 и второй фиксирующий участок 53. В данном примере первый и второй фиксирующий участок 51, 53 представляют собой отдельные компоненты, соединяющиеся вместе, формируя фиксатор 47. Однако в другом примере фиксатор 47 является цельной деталью.
[0111] Фиксатор 47 выполнен с возможностью вращения вокруг продольной оси тренировочного устройства 1 таким образом, что фиксатор 47 может быть размещен в разных поворотных ориентациях. Фиксатор 47 может поворачиваться, но не может перемещаться проксимально или дистально относительно корпусного участка 3. В первой ориентации фиксатор 47 сопротивляется перемещению исполнительного механизма 9 из его проксимального положения (как показано на Фиг. 2A-B) в дистальное положение (как показано на Фиг. 2E). Следовательно, первая ориентация фиксатора 47 выполнена с возможностью удержания исполнительного механизма 9 в конфигурации, описанной на Фиг. 2A-B. Кроме того, первая ориентация фиксатора 47 выполнена с возможностью удержания колпачка 11 в исходном положении (как показано на Фиг. 2B), так что колпачок 11 не может перемещаться из исходного положения в выдвинутое положение (как показано на Фиг. 3A-B), и позволяет колпачку 11 перемещаться из исходного положения в отведенное положение (как показано на Фиг. 2C).
[0112] Существует и вторая ориентация фиксатора 47, в которой фиксатор 47 позволяет исполнительному механизму 9 перемещаться из проксимального положения в дистальное положение. Следовательно, вторая ориентация фиксатора 47 выполнена с возможностью перемещения исполнительного механизма 9 в положение, показанное на Фиг. 2E.
[0113] Тренировочное устройство 1 также содержит смещающий элемент 55, который в данном примере представляет собой скручивающуюся пружину. Смещающий элемент 55 смещает фиксатор 47 в первом направлении вращения 57. В зависимости от ориентации тренировочного устройства 1 первое направление вращения 57 может быть по часовой стрелке или против часовой стрелки.
[0114] Тренировочное устройство 1 дополнительно содержит внутренний корпус 59, который имитирует шприц инъекционного устройства, и захват 61, который удерживает внутренний корпус на месте.
[0115] На Фиг. 5A-B представлено тренировочное устройство 1 в конфигурации согласно Фиг. 2A-2B с исполнительным механизмом 9 в проксимальном положении и колпачком 11 в исходном положении. В этой конфигурации фиксатор 47 находится в первой ориентации, которая предотвращает перемещение исполнительного механизма 9 в дистальном направлении.
[0116] Как показано на Фиг. 5A-B и Фиг. 6, фиксатор 47 содержит поверхность сопротивления 63 исполнительного механизма, которая содержит выступ из части внешней поверхности цилиндрического корпуса фиксатора 47. Поверхность сопротивления 63 исполнительного механизма выступает из фиксатора 47 в направлении от продольной оси тренировочного устройства 1. Исполнительный механизм 9 содержит опорную поверхность 65, которая содержит выступ из части внутренней поверхности исполнительного механизма 9. Опорная поверхность 65 выступает из исполнительного механизма 9 в направлении к продольной оси тренировочного устройства 1. Опорная поверхность 65 выполнена с возможностью упора в поверхность сопротивления 63 исполнительного механизма. Таким образом, поверхность сопротивления 63 исполнительного механизма выполнена с возможностью сопротивления перемещению исполнительного механизма 9 из проксимального положения в дистальное положение, когда фиксатор 47 находится в первой ориентации.
[0117] Тренировочное устройство 1 содержит две поверхности сопротивления 63 исполнительного механизма. В этом примере поверхности сопротивления 63 исполнительного механизма расположены на противоположных сторонах фиксатора 47 относительно друг друга. Это позволяет усилию исполнительного механизма 9, распределяться по фиксатору 47. Также имеются две соответствующие опорные поверхности 65, которые в данном примере расположены на противоположных сторонах исполнительного механизма 9 относительно друг друга.
[0118] Фиксатор 47 содержит ограничитель 67, выполненный с возможностью размещения внутри выемки 69 во внутренней части 31 колпачка 11. Ограничитель 67 предотвращает дистальное перемещение колпачка 11 из исходного положения в выдвинутое положение, позволяя колпачку 11 перемещаться проксимально в направлении отведенного положения. В этом примере фиксатор 47 содержит пару ограничителей 67, расположенных на противоположных сторонах фиксатора 47. Внутренняя часть колпачка 31 содержит пару соответствующих выемок 69, расположенных на противоположных сторонах внутренней части колпачка 31. Выемки 69 представляют собой отверстия такого же или подобного размера, как и окошко 12 согласно Фиг. 1.
[0119] На Фиг. 7A-B представлено тренировочное устройство 1 в конфигурации согласно Фиг. 2С с исполнительным механизмом 9 в проксимальном положении и колпачком 11 в отведенном положении. В этой конфигурации фиксатор 47 повернут во вторую ориентацию, которая позволяет исполнительному механизму 9 перемещаться в дистальном направлении, как подробно описывается ниже.
[0120] Как показано на Фиг. 5 A и 6, фиксатор 47 содержит уклон 71, который в данном примере представляет собой угловую поверхность, проходящую от внешней поверхности второго фиксирующего участка 53. Внутренний участок колпачка 31 содержит наклонный контактный элемент 73, который в данном примере представляет собой угловую поверхность в выемке внутреннего участка колпачка 31. Уклон 71 и наклонный контактный элемент 73 имеют такую форму и расположение, что при перемещении колпачка 11 из исходного положения в отведенное положение наклонный контактный элемент 73 вызывает поворот фиксатора 47. В данном примере уклон 71 и наклонный контактный элемент 73 заставляют фиксатор 47 вращаться во втором направлении вращения 75, которое противоположно первому направлению вращения 57, к которому смещен фиксатор 47.
[0121] Предпочтительно, чтобы фиксатор 47 включал пару уклонов 71, а колпачок 11 - два наклонных контактных элемента 73. Каждый уклон 71 может находиться на противоположной стороне фиксатора 47. Каждый наклонный контактный элемент 73 может находиться на противоположной стороне фиксатора 11. Это способствует уменьшению сил трения, действующих на фиксатор 47 и колпачок 11.
[0122] Перемещение колпачка 11 в отведенное положение приводит к повороту фиксатора 47 во второе положение, которое показано на Фиг. 7A-B. Здесь видно, что выступ, образованный уклоном 71, входит внутрь выемки, образованной уклоном 73, чтобы удерживать колпачок 11 в отведенном положении. Когда фиксатор 47 находится во второй ориентации, зазор 77, образованный на конце поверхности сопротивления 63 исполнительного механизма, по меньшей мере, частично совмещается в окружном направлении с опорной поверхностью 65, таким образом, что опорная поверхность 65 может проходить через зазор 77. Таким образом, опорная поверхность 65 может перемещаться мимо поверхности сопротивления 63 исполнительного механизма, и исполнительный механизм 9 может начать перемещаться от проксимального положения к дистальному положению. Ширина опорной поверхности 65 равна ширине зазора 65 или меньше нее. В примере с двумя опорными поверхностями 65 и двумя поверхностями сопротивления 63 исполнительного механизма такой же процесс происходит на противоположных сторонах тренировочного устройства 1.
[0123] Как показано на Фиг. 6, поверхность сопротивления 63 исполнительного механизма фиксатора 47 содержит дефлекторный участок 79, выполненный с возможностью взаимодействия с опорной поверхностью 65 исполнительного механизма при дистальном перемещении исполнительного механизма. При взаимодействии опорной поверхности 65 с дефлекторным участком 79 фиксатор 47 перемещается дальше во втором направлении вращения 75 из второй ориентации в третью ориентацию. По мере того как исполнительный механизм 9 перемещается на первое расстояние в дистальном направлении, опорная поверхность 65 перемещается в зазор 77 фиксатора 47. Таким образом, усилие исполнительного механизма 9 перемещает фиксатор 47 в третье положение, которое перемещает ограничитель 67 в паз 81 во внутренней поверхности внутреннего участка колпачка 31. Когда опорная поверхность 65 находится внутри зазора 77, это удерживает фиксатор 47 в третьей ориентации. Опорная поверхность 65 не доходит до верхнего участка исполнительного механизма 9. Таким образом, после того как опорная поверхность 65 переместилась мимо зазора 77 и колпачок 11 переместилось из зацепления с фиксатором 47, фиксатор 47 может повернуться обратно в первом направлении вращения под действием усилия, приложенного смещающим элементом 55.
[0124] Паз 81 во внутреннем участке колпачка 31 образует направляющую, позволяя ограничителю 67 скользить по ней. Паз 81 имеет отверстие 83 на проксимальном конце внутреннего участка колпачка 31. Паз 81 позволяет колпачку 11 перемещаться в дистальном направлении из отведенного положения в выдвинутое положение, а после того как ограничитель 67 достигнет отверстия 83, внутренний участок колпачка 31 высвобождается от контакта с фиксатором 47.
[0125] Колпачок 11 может перемещаться в выдвинутое положение, когда ограничитель 67 выходит из отверстия 83 паза 81. Это позволяет колпачку 11 перемещаться мимо фиксатора 47 в выдвинутое положение, которое является более дистальным по сравнению с положением фиксатора 47 и исходным положением. Расположение колпачка 11 относительно фиксатора 47, когда колпачок 11 находится в выдвинутом положении, показано на Фиг. 8, что представляет собой конфигурацию, описанную со ссылкой на Фиг. 3A.
[0126] Как показано на Фиг. 6, ограничитель 67 содержит упругий элемент 85, выполненный с возможностью сгибания внутрь внутреннего участка колпачка 31. Таким образом, упругий элемент 85 и ограничитель 67 могут перемещаться внутрь к продольной оси тренировочного устройства 1. Ограничитель 67 прижимается к краю выемки 69, когда исполнительный механизм 9 вынуждает фиксатор 47 поворачиваться из второй ориентации в третью ориентацию. Это толкает ограничитель 67 и упругий элемент 85 внутрь таким образом, что ограничитель 67 может входить в паз 81 во внутреннем участке колпачка 31. Как показано, ограничитель 67 имеет угловую поверхность, способствующую изгибанию упругого элемента 85 внутрь.
[0127] Когда тренировочное устройство 1 находится в состоянии, показанном на Фиг. 3A и Фиг. 8, исполнительный механизм 9 более не удерживает фиксатор 47 в третьем положении, и уклон 71 более не может касаться наклонного контактного элемента 73. Таким образом, фиксатор 47 может свободно вращаться в первом направлении вращения 57 и проталкиваться в этом направлении смещающим элементом 55.
[0128] Проходя первую ориентацию, фиксатор 47 поворачивается в четвертую ориентацию, в которой участок исполнительного механизма 9 упирается в дефлектор возврата в исходное положение 87 на фиксаторе 47. Это удерживает фиксатор 47 в четвертой ориентации для предотвращения проксимального перемещения колпачка 11 из выдвинутого положения к исходному положению. Таким образом, колпачок 11 имитирует состояние блокировки инъекционного устройства.
[0129] Когда фиксатор 47 находится в четвертой ориентации, поверхность сопротивления колпачка 89 упирается в поверхность на проксимальном конце внутреннего участка колпачка 31. В этом примере поверхность сопротивления колпачка 89 представляет собой выступ, проходящий от уклона 71. Поверхность сопротивления колпачка 89 блокирует траекторию колпачка 11 таким образом, чтобы он не мог перемещаться в проксимальном направлении из выдвинутого положения.
[0130] Как описано выше со ссылкой на Фиг. 3A-C, пользователь может вернуть тренировочное устройство 1, в исходное положение, потянув исполнительный механизм 9 из дистального положения обратно в проксимальное положение. При перемещении исполнительного механизма 9 в проксимальном направлении опорная поверхность 65 сопрягается с угловой поверхностью дефлектора возврата в исходное положение 87 для поворота фиксатора 47 из четвертой ориентации в первую ориентацию.
[0131] Когда фиксатор 47 повернут на первое угловое расстояние во втором направлении вращения 75 к первой ориентации, поверхность сопротивления колпачка 89 больше не находится непосредственно над проксимальным концом внутреннего участка колпачка 31 в направлении продольной оси тренировочного устройства 1. Вместо этого поверхность сопротивления колпачка 89 находится непосредственно над углублением во внутреннем участке колпачка 31 в направлении продольной оси тренировочного устройства 1. Таким образом, колпачок 11 способен перемещаться в исходное положение из выдвинутого положения.
[0132] При перемещении колпачка 11 из выдвинутого положения назад к исходному положению наклонный контактный элемент 73 колпачка 11 оказывает усилие на уклон 71 фиксатора 47. Это приводит к перемещению фиксатора 47 во втором направлении вращения 75 в первую ориентацию. По мере перемещения внутреннего участка колпачка 31 в проксимальном направлении ограничитель 67 и упругий элемент 85 разгибаются внутрь таким образом, что ограничитель 67 проходит под проксимальным концом внутреннего участка колпачка 31. По мере дальнейшего перемещения внутреннего участка колпачка 31 ограничитель 67 входит в выемку 69, которая удерживает колпачок 11 в исходном положении, как описано выше. Кроме того, как только колпачок 11 достигает исходного положения, фиксатор 47 поворачивается в первую ориентацию, как описано выше. Таким образом, можно вернуть тренировочное устройство 1 в исходное положение, описанное со ссылкой на Фиг. 2B.
[0133] Можно вручную переместить колпачок 11 из выдвинутого положения в направлении исходного положения, чтобы вернуть устройство в исходное положение. Однако для этого пользователю необходимо одновременно переместить исполнительный механизм 9 в проксимальное положение и колпачок 11 переместить в исходное положение. В этой операции необходимо задействование обеих рук. Как показано на Фиг. 9, предусмотрен соединитель для возврата в исходное положение 91, который автоматически тянет колпачок 11 из выдвинутого положения в исходное положение при оттягивании исполнительного механизма 9 из дистального положения в проксимальное положение.
[0134] Соединитель для возврата в исходное положение 91 собой стержень фиксированной длины, который содержит контактный элемент исполнительного механизма, такой как первый крючок 93, расположенный на его проксимальном конце. Первый крючок 93 выполнен с возможностью взаимодействия с участком исполнительного механизма 9, таким как рейка 95 на внутренней части 39 исполнительного механизма 9. Выступ 95 обращен в проксимальном направлении и, следовательно, перемещение исполнительного механизма в проксимальном направлении перемещает соединитель для возврата в исходное положение 91 в проксимальном направлении, когда выступ 95 контактирует с первым крючком 93. Однако перемещение исполнительного механизма 9 в дистальном направлении не вызывает перемещения соединителя для возврата в исходное положение 91 в данном направлении, поскольку исполнительный механизм 9 не может оказать усилия на первый крючок 93 в данном направлении.
[0135] Остальная часть соединителя 91 также содержит контактный элемент колпачка, такой как второй крючок 97 расположенный на его дистальном конце. Второй крючок 97 выполнен с возможностью примыкания к участку колпачка 11, например, при введении в отверстие 92 на колпачке 11. Когда соединитель для возврата в исходное положение 91 перемещается в проксимальном направлении при перемещении исполнительного механизма в проксимальное положение, проксимальный конец 92a отверстия 92 контактирует со вторым крючком 97. Это позволяет соединителю для возврата в исходное положение 91 тянуть колпачок 11 в исходное положение для сброса тренировочного устройства 1.
[0136] Отверстие 92 может быть выполнено, как показано на Фиг. 9, в виде удлиненного отверстия, проходящего в дистальном направлении вдоль внутреннего участка колпачка 31. Второй крючок 97 может быть всегда расположен внутри отверстия во время работы тренировочного устройства 1. В этих вариантах осуществления изобретения второй крючок 97 проходит вдоль отверстия 92 по мере того, как исполнительный механизм 9 перемещается дистально из проксимального положения, показанного на Фиг. 2B, в дистальное положение, показанное на Фиг. 2E, и перемещается проксимально из дистального положения к проксимальному положению, до тех пор пока второй крючок 97 не войдет в контакт с проксимальным концом 92a отверстия, как описано выше, позволяя соединителю для возврата в исходное положение 91 потянуть колпачок 11 в исходное положение для сброса тренировочного устройства 1.
[0137] Отверстие 92 может быть образовано в любой подходящей части колпачка 11. Например, отверстие может быть выполнено на внешнем участке колпачка 29 и функционировать по существу таким же образом, как описано выше. Отверстие 92 может проходить в направлении, перпендикулярном продольной оси тренировочного устройства 1, через участок колпачка, в котором оно выполнено. В качестве альтернативы отверстие может представлять собой вытравленный участок, или углубление, на поверхности колпачка 11.
[0138] В некоторых вариантах осуществления изобретения, включая показанные на Фиг. 9, отверстие 92 может иметь закрытый дистальный конец. В качестве альтернативы отверстие может быть выполнено в виде паза в дистальном конце внутреннего и (или) внешнего участка колпачка с закрытым проксимальным концом 92a, в который упирается второй крючок 97, и открытым дистальным концом.
[0139] В некоторых вариантах осуществления изобретения отверстие может не проходить вдоль колпачка 11 в дистальном направлении таким образом, что второй крючок 97 всегда располагается внутри отверстия во время работы тренировочного устройства 1. Например, отверстие 92 может быть выполнено в виде приблизительно круглого отверстия в колпачке 11. Стержень для возврата в исходное положение 91 может быть выполнен таким образом, что второй крючок 97 упруго смещается в отверстие при перемещении исполнительного механизма к его проксимальному положению, чтобы обеспечить контакт между вторым крючком 97 и проксимальным концом 92a отверстия и, следовательно, оттянуть колпачок 11 к исходному положению для сброса тренировочного устройства 1. Второй крючок 97 на дистальном конце может иметь форму, обеспечивающую сцепление кулачка с закрытым дистальным концом отверстия. Когда стержень для возврата в исходное положение 91 перемещается в дистальном направлении при перемещении исполнительного механизма в дистальное положение, кулачок между вторым крючком 97 и дистальным концом отверстия преодолевает упругое смещение, позволяя второму крючку 97 расцепиться с отверстием 92 при перемещении исполнительного механизма в дистальном направлении.
[0140] Как показано на Фиг. 10, тренировочное инъекционное устройство 1 содержит защелку 99, которая выполнена с возможностью прикрепления к внутренней части 39 исполнительного механизма 9. В данном примере защелка 99 содержит отрезок упругой проволоки в виде петли 101, выполненной с возможностью размещения вокруг кругового выступа 103 на внутреннюю часть 39. Так как защелка 99 является упругой, диаметр петли 101 может быть увеличен, при этом петля может быть размещена вокруг кругового выступа. Затем петля может быть высвобождена, после чего диаметр петли 101 сжимается таким образом, что защелка удерживает круглый выступ 103. Защелка 99 также содержит первую выступающую часть 105, которая расположена между парой держателей 107, удерживающих защелку 99 на месте.
[0141] Защелка 99 дополнительно содержит вторую выступающую часть 109, которая в данном примере длиннее первой выступающей части 105. Вторая выступающая часть 109 содержит первый участок 111, который проходит в дистальном направлении, и второй участок 113, который расположен под углом по отношению к первому участку 111. Вторая часть 113 образует отклоняющую часть на дистальной стороне и захватывающий элемент на проксимальной стороне. После перемещения исполнительного механизма 9 на некоторое расстояние из проксимального положения в дистальное положение второй участок 113 входит в контакт с выступом 115 корпуса на основном участке 23 корпусного участка 3.
[0142] При дистальном перемещении исполнительного механизма 9 упругая защелка 99 изгибается наружу в сторону от продольной оси тренировочного устройства 1 и верх выступа корпуса 115. Как только исполнительный механизм 9 переместился в дистальное положение, защелка 99 возвращается в нерабочее положение. В этом состоянии угловая поверхность защелки 99, представляющая собой захватывающий элемент, соединяет защелку 99 с выступом корпуса 115. Это удерживает исполнительный механизм 9 в дистальном положении относительно корпусного участка 3
[0143] При перемещении исполнительного механизма 9 из дистального положения в проксимальное положение выступ корпуса 115 прилагает усилие к защелке 99. Когда это усилие превышает пороговое значение, захватывающий элемент второго участка 113 изгибается в направлении, перпендикулярном направлению, проходящему от продольной оси тренировочного устройства 1. Таким образом, захватывающий элемент проходит через выступ 115 корпуса, так что исполнительный механизм 9 может высвобождаться из дистального положения. Пороговое значение усилия, необходимое для сгибания защелки, обеспечивает надежное удерживание исполнительного механизма 9 в дистальном положении. Однако пороговое усилие также позволяет исполнительному механизму 9 возвращаться обратно в проксимальное положение после того, как захватывающий элемент освобождает выступ корпуса.
[0144] На Фиг. 11A-B демпфирующий элемент 45, кратко описанный со ссылкой на Фиг. 4, более подробно описан ниже.
[0145] В тренировочном устройстве 1 поршень 41 исполнительного механизма 9 имеет резьбу, соединенную с ротором 117. Ротор 117 может включать в себя внутреннюю резьбу 118, выполненную с возможностью зацепления с резьбой поршня 41 для облегчения соединения поршня 41 и ротора 117. Поршень 41 прикреплен к внутренней части 39 исполнительного механизма 9 таким образом, что поршень не может вращаться относительно исполнительного механизма 9. Ротор 117 взаимодействует с резьбой, и, следовательно, поршень 41 заставляет ротор 117 вращаться во втором направлении вращения 75 по мере дистального перемещения поршня 41 вместе с исполнительным механизмом 9. Ротор 117 соединен с демпфирующим элементом 45, который в данном примере представляет собой торсионную пружину 119, смещенную к скрученному состоянию. По мере поворота ротора 117 он раскручивает торсионную пружину 119, которая демпфирует его вращение и, таким образом, замедляет продвижение исполнительного механизма 9 к дистальному положению. Свойства пружины 119 можно выбрать в соответствии с необходимым сопротивлением. Например, если требуется высокое сопротивление, можно выбрать пружину 119 с высоким коэффициентом жесткости.
[0146] Амортизирующий элемент 45 также содержит храповой механизм 121, включающий множество угловых зубцов, которые перекрываются с угловыми зубцами 130 на роторе 117. После перемещения исполнительного механизма 9 на некоторое расстояние к дистальному положению угловые зубцы ротора 117 перемещаются в зацепление с угловыми зубцами храпового механизма 121. Ротор 117 и храповой механизм 121 образуют антиротационный механизм, который позволяет ротору 117 поворачиваться во втором направлении вращения 75, но препятствует перемещению ротора в первом направлении вращения 57. Таким образом, натяжение торсионной пружины 119 сохраняется по мере того, как ротор 117 раскручивает ее, поскольку она не может переместиться обратно в скрученное состояние.
[0147] Каждый из угловых зубцов 130 ротора 117 может включать в себя угловой край 132 (например, расположенный под углом по отношению к продольной оси инструктора) и прямой край 131 (например, расположенный параллельно по отношению к продольной оси инструктора). Ротор 117 может быть выполнен таким образом, чтобы угловой край каждого зубца был обращен во втором направлении вращения 75. Другими словами, угловой край каждого углового зубца ведет, когда ротор 117 приводится во вращение, когда поршень 41 перемещается дистально вместе с исполнительным механизмом 9. Угловые зубцы храпового механизма 121 приблизительно совпадают с угловыми зубцами ротора 117. Другими словами, прямые края каждого зубца храпового механизма 121 обращены во втором направлении вращения 75 таким образом, что прямые края зубцов ротора 117 упираются в соответствующий прямой край зубцов храпового механизма 121, препятствуя перемещению ротора в первом направлении вращения 57. Храповой механизм 121 может быть закреплен с возможностью поворота относительно исполнительного механизма 9.
[0148] Демпфирующий элемент 45 и ротор 117 могут быть выполнены в соответствии с точкой, в которой при нажатии на исполнительный механизм требуется зацепление ротора 117 и храпового механизма 121 и, следовательно, формирование антиротационного механизма. Например, в вариантах осуществления изобретения, в которых используется пружина 119 с высоким коэффициентом жесткости, может быть целесообразно, чтобы при нажатии на исполнительный механизм 9 антиротационный механизм сцеплялся раньше, чтобы помочь пользователю при сопротивлении смещению пружины 119 в скрученное состояние. Ранее существовавшее зацепление антиротационного механизма можно достичь, например, путем использования угловых зубцов храпового механизма 121 с большой высотой вдоль продольной оси тренировочного устройства 1.
[0149] Когда исполнительный механизм 9 вытягивается, а не выталкивается или, иными словами, когда исполнительный механизм 9 перемещается проксимально, поршень 41 перемещает угловые зубцы ротора 117 из зацепления с угловыми зубцами храпового механизма 121. Это позволяет ротору перемещаться в первом направлении вращения 57 при проксимальном перемещении поршня 41 и перемещении пружины обратно в скрученное состояние. Расстояние отсоединения - расстояние, на которое исполнительный механизм 9, поршень 41 и ротор 117 перемещаются в проксимальном направлении для перемещения угловых зубцов ротора 117 из зацепления с угловыми зубцами храпового механизма 121 - это расстояние превышает высоту угловых зубцов храпового механизма 1. В некоторых вариантах осуществления изобретения расстояние отсоединения может составлять приблизительно 2 мм.
[0150] Демпфирующий элемент может быть встроен в тренировочное устройство 1 для имитации введения дозы большого объема и (или) высокой вязкости. Демпфирующий элемент может также использоваться в инъекционных устройствах, чтобы пользователь медленно нажимал на исполнительный механизм 9 при введении большой дозы или вещества с низкой вязкостью (которое само по себе может обладать низкой устойчивостью к нажатию), для смягчения негативных побочных эффектов, связанных со слишком быстрым введением инъекции вещества, например образование синяков, болевые ощущения, скопление введенного вещества в организме пациента и т.д.
[0151] В альтернативном варианте осуществления демпфирующего элемента торсионная пружина может быть соединена с храповым механизмом. Как и в предыдущем варианте осуществления изобретения, ротор взаимодействует с резьбой поршня и, следовательно, поршень вызывает вращение ротора во втором направлении вращения при перемещении поршня с исполнительным механизмом в дистальном направлении. В этом варианте осуществления изобретения ротор выполнен таким образом, что прямые края каждой поверхности зубца обращены во втором направлении вращения. Иными словами, прямой край каждого углового зубца ведет, когда ротор приводится во вращение, при перемещении ротора в дистальном направлении вместе с исполнительным механизмом. Первоначальный поворот ротора в данном варианте осуществления изобретения не вызывает раскручивания торсионной пружины. Таким образом, первоначальное продвижение исполнительного механизма к дистальному положению достигается за счет незначительного сопротивления или его отсутствия.
[0152] Альтернативный демпфирующий элемент содержит храповой механизм, соединенный с торсионной пружиной в скрученном состоянии. Храповой механизм содержит множество угловых зубцов, которые стыкуются с угловыми зубцами на роторе. После перемещения исполнительного механизма на некоторое расстояние к дистальному положению угловые зубцы ротора перемещаются в зацепление с угловыми зубцами храпового механизма таким образом, что прямые края зубцов ротора поворачиваются, упираясь в соответствующий прямой край зубцов храпового механизма. В данном варианте осуществления изобретения, как только ротор и храповый механизм зацепились друг с другом, непрерывное вращение ротора вызывает вращение храпового механизма. Вращение храпового механизма приводит к раскручиванию торсионной пружины, которая замедляет вращение храпового механизма и ротора и, таким образом, замедляет дальнейшее продвижение исполнительного механизма к дистальному положению. Опять же, конфигурация демпфирующего элемента и ротора, например свойства пружины и высота зубьев, может быть выбрана в соответствии с необходимым профилем сопротивления.
[0153] В некоторых вариантах осуществления изобретения ротор 117 и (или) демпфирующий элемент 45 могут представлять собой сменные части для тренировочного устройства или инъекционного устройства. Например, устройство может быть выполнено таким образом, что торсионная пружина 119 может быть заменена другой пружиной с более высоким или более низким коэффициентом жесткости. Это упрощает, например, использование одного тренировочного устройства для обучения пользователя введению веществ различной вязкости.
[0154] В контексте настоящей заявки инъекционное устройство может представлять собой автоматическое инъекционное устройство. В таких инъекционных устройствах с электрическим приводом исполнительный механизм 9 приводится в действие или заменяется автоматическим исполнительным механизмом, таким как приводная пружина, пневматический поршень, приводимый в действие посредством емкости со сжатым газом, или соленоид.
[0155] В таких автоматических инъекционных устройствах демпфирующий элемент 45 может использоваться для демпфирования, замедления или регулирования усилия, приложенного исполнительным механизмом к контейнеру, содержащему вещество для инъекции, и (или) механизму введения, например, поршню контейнера с лекарственным препаратом, таком как шприц. Демпфирующий элемент может использоваться для настройки скорости автоматического инъекционного устройства без изменений параметров автоматического исполнительного механизма.
[0156] Демпфирующий элемент может быть выполнен для работы на любом участке последовательности приведения в действие. Например, демпфирующий элемент может быть выполнен с возможностью замедления продвижения исполнительного механизма к дистальному положению во время всего продвижения или только для выбранного участка. В некоторых вариантах осуществления изобретения инъекционное устройство может быть выполнено таким образом, что замедление продвижения исполнительного механизма начинается в точке полного выдвижения иглы на контейнере для лекарственных препаратов, например, для обеспечения полного введения инъекционного вещества с помощью автоматического инъекционного устройства.
[0157] Если не указано иное, каждый описанный в настоящем документе вариант осуществления изобретения можно комбинировать с другим вариантом осуществления, описанным в настоящем документе.
[0158] Следует понимать, что предполагаемые выгоды и преимущества, описанные выше, могут относиться к одному или нескольким вариантам осуществления изобретения. Варианты осуществления изобретения не ограничиваются вариантами, решающими любые или все указанные проблемы, или вариантами с любыми или всеми указанными предполагаемыми выгодами и преимуществами.
[0159] Ссылки на термин «элемент» относится к одному или более из этих элементов.
[0160] Ссылки в настоящем документе на термин «элемент» дополнительно могут соответствовать термину «средство» для элемента, выполняющего конкретную функцию, как указано в настоящем документе.
[0161] Следует понимать, что приведенное выше описание предпочтительного варианта осуществления изобретения приведено только в качестве примера и что специалисты в данной области могут вносить различные модификации. Хотя выше описаны различные варианты осуществления изобретения с определенной степенью детализации или со ссылкой на один или несколько отдельных вариантов осуществления, специалисты в данной области смогут внести множество изменений в описанные варианты осуществления изобретения без отступления от объема настоящего изобретения.
Аспекты изобретения, которые являются частью описания
1. Тренировочное инъекционное устройство для обучения пользователя применению инъекционного устройства, содержащее:
корпусный участок; и
исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, таким образом удерживая исполнительный механизм в дистальном положении.
2. Тренировочное инъекционное устройство по аспекту 1, в котором защелка выполнена с возможностью издавать звуковой сигнал при соединении защелки с выступом корпуса.
3. Тренировочное инъекционное устройство для обучения пользователя применению инъекционного устройства, содержащее:
корпусный участок; и
исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и воспроизведения звукового сигнала.
4. Тренировочное инъекционное устройство по аспекту 3, в котором защелка удерживает исполнительный механизм в дистальном положении, когда защелка соединена с выступом корпуса.
5. Тренировочное инъекционное устройство по любому одному из предшествующих аспектов, в котором защелка включает упругий элемент.
6. Тренировочное инъекционное устройство по любому одному из предшествующих аспектов, в котором защелка перемещается между разъединенным положением, в котором она не соединена с выступом корпуса, и соединенным положением, в котором защелка соединена с выступом корпуса.
7. Тренировочное инъекционное устройство по аспекту 5 или аспекту 6, в котором упругий элемент выполнен с возможностью перехода из соединенного состояния в разъединенное, когда к исполнительному механизму прилагается сила, превышающая пороговое значение, при перемещении исполнительного механизма из дистального положения в проксимальное.
8. Тренировочное инъекционное устройство по любому одному из предшествующих аспектов, в котором защелка включает дефлекторный участок, который выполнен с возможностью стыковки с выступом корпуса для перемещения защелки из разъединенного положения в соединенное положение.
9. Тренировочное инъекционное устройство по аспекту 8, в котором защелка включает упругий элемент, который содержит дефлекторный участок защелки.
10. Тренировочное инъекционное устройство по любому одному из предшествующих аспектов, в котором защелка содержит элемент захвата, выполненный с возможностью захвата участка корпуса в соединенном состоянии.
11. Тренировочное инъекционное устройство по аспекту 10, в котором защелка включает упругий элемент, который содержит элемент захвата.
12. Тренировочное инъекционное устройство по аспекту 8 и аспекту 10, в котором дефлекторный участок защелки и элемент захвата находятся на противоположных сторонах защелки.
13. Тренировочное инъекционное устройство по любому одному из аспектов 1-12, в котором:
исполнительный механизм соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора; и
тренировочное инъекционное устройство дополнительно содержит демпфирующий элемент, соединенный или выполненный с возможностью соединения с ротором, для замедления вращения ротора.
14. Инъекционное устройство, содержащее:
иглу, соединенную с камерой для хранения текучей среды;
корпусный участок; и
исполнительный механизм, расположенный в направлении проксимального конца корпусного участка, выполненный с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, хранящейся в камере, через иглу;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, таким образом удерживая исполнительный механизм в дистальном положении.
15. Инъекционное устройство, содержащее:
иглу, соединенную с камерой для хранения текучей среды;
корпусный участок; и
исполнительный механизм, расположенный в направлении проксимального конца корпусного участка, выполненный с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, хранящейся в камере, через иглу;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и воспроизведения звукового сигнала.
16. Инъекционное устройство по п. 14 или п. 15, в котором:
исполнительный механизм соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора; и
инъекционное устройство дополнительно содержит демпфирующий элемент, соединенный или выполненный с возможностью соединения с ротором с целью замедления вращения ротора.
17. Набор, состоящий из отдельных компонентов, для сборки тренировочного инъекционного устройства по любому одному из аспектов с 1 по 13 или инъекционного устройства по любому одному из аспектов 14-16.
18. Способ обучения пользователя применению инъекционного устройства, включающий тренировочное инъекционное устройство, содержащее:
корпусный участок; и
исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой; и
способ дополнительно включает этапы:
перемещения исполнительного механизма из проксимального положения в дистальное положение таким образом, что защелка соединяется с выступом корпуса, когда исполнительный механизм находится в дистальном положении, удерживая исполнительный механизм в дистальном положении.
19. Способ введения инъекции, включающий инъекционное устройство, содержащее:
иглу, соединенную с камерой для хранения текучей среды;
корпусный участок; и
исполнительный механизм, расположенный в направлении проксимального конца корпусного участка, выполненный с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, хранящейся в камере, через иглу;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой; и
способ дополнительно включает этапы:
перемещения исполнительного механизма из проксимального положения в дистальное положение таким образом, что защелка соединяется с выступом корпуса, когда исполнительный механизм находится в дистальном положении, удерживая исполнительный механизм в дистальном положении.
20. Способ обучения пользователя применению инъекционного устройства, включающий тренировочное инъекционное устройство, содержащее:
корпусный участок; и
исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой; и
способ дополнительно включает этапы:
перемещения исполнительного механизма из проксимального положения в дистальное положение таким образом, что защелка соединяется с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и издает звуковой сигнал, когда защелка соединяется с выступом корпуса.
21. Способ введения инъекции, включающий инъекционное устройство, содержащее:
иглу, соединенную с камерой для хранения текучей среды;
корпусный участок; и
исполнительный механизм, расположенный в направлении проксимального конца корпусного участка, выполненный с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, хранящейся в камере, через иглу;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой; и
способ дополнительно включает этапы:
перемещения исполнительного механизма из проксимального положения в дистальное положение таким образом, что защелка соединяется с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и издает звуковой сигнал, когда защелка соединяется с выступом корпуса.
22. Способ по п. 18 или п. 20, в котором:
исполнительный механизм соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора;
тренировочное инъекционное устройство дополнительно содержит демпфирующий элемент с возможностью соединения с ротором для замедления вращения; и
способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение, в течение которого демпфирующий элемент замедляет вращение ротора и, следовательно, перемещение исполнительного механизма в дистальное положение.
23. Способ по п. 19 или 21, в котором:
исполнительный механизм соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора;
инъекционное устройство дополнительно содержит демпфирующий элемент, выполненный с возможностью соединения с ротором для замедления вращения ротора; и
способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение, в течение которого демпфирующий элемент замедляет вращение ротора и, следовательно, перемещение исполнительного механизма в дистальное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО И ТРЕНИРОВОЧНОЕ ИНЪЕКЦИОННОЕ УСТРОЙСТВО, СПОСОБ ВВЕДЕНИЯ ИНЪЕКЦИИ И СПОСОБ ОБУЧЕНИЯ ПОЛЬЗОВАТЕЛЯ ПРИМЕНЕНИЮ ИНЪЕКЦИОННОГО УСТРОЙСТВА | 2019 |
|
RU2806295C2 |
| СОЕДИНИТЕЛЬ ДЛЯ ВОЗВРАТА В ИСХОДНОЕ ПОЛОЖЕНИЕ ИНЪЕКЦИОННОГО УСТРОЙСТВА И УЧЕБНО-ТРЕНИРОВОЧНОГО ИНЪЕКЦИОННОГО УСТРОЙСТВА | 2019 |
|
RU2806845C2 |
| КОЛПАЧОК ДЛЯ ИНЪЕКЦИОННОГО УСТРОЙСТВА | 2018 |
|
RU2770382C1 |
| АВТОМАТИЧЕСКОЕ ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2012 |
|
RU2620352C2 |
| АВТОМАТИЧЕСКОЕ ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2012 |
|
RU2620350C2 |
| АВТОМАТИЧЕСКОЕ ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2012 |
|
RU2620351C2 |
| Приспособление для инъекционного устройства, в частности для введения инъекции одной рукой, и содержащие его система для инъекции и инъекционное устройство | 2019 |
|
RU2812600C2 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2578360C2 |
| Приспособление для инъекционного устройства, в частности для удаления колпачка иглы, и содержащие его система для проведения инъекции и инъекционное устройство. | 2019 |
|
RU2811743C2 |
| Приспособление для инъекционного устройства, в частности для удаления колпачка иглы, и содержащие его система для проведения инъекции и инъекционное устройство | 2019 |
|
RU2811744C2 |
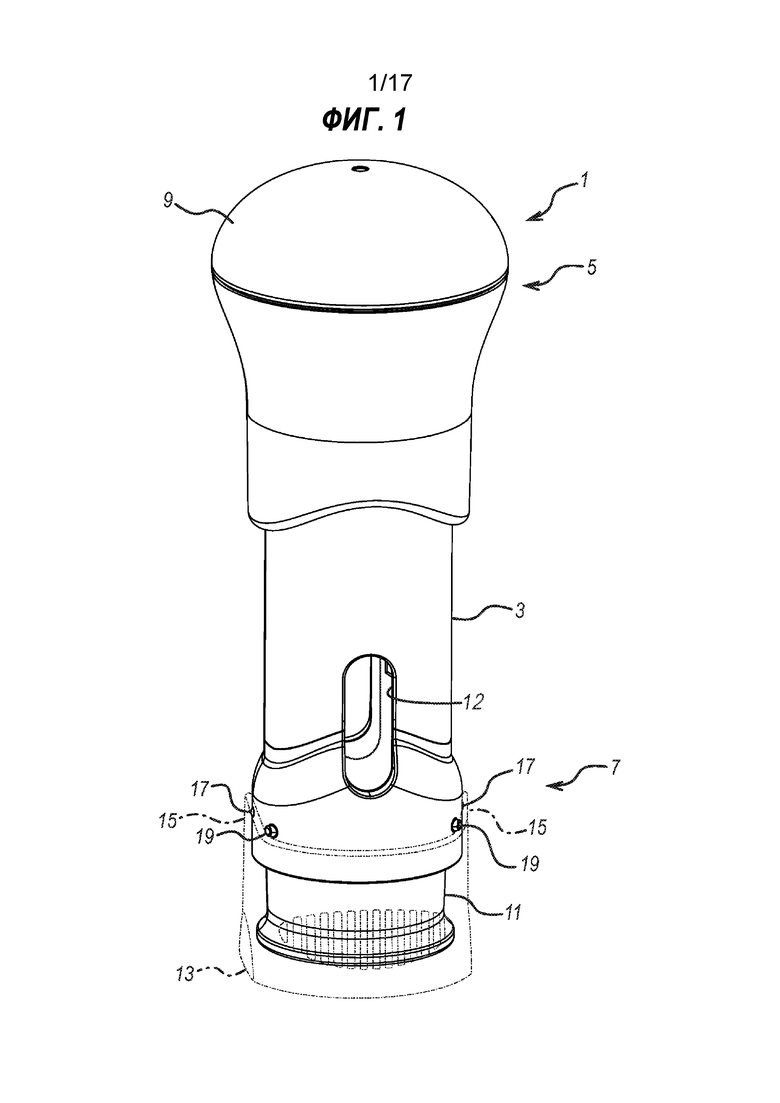
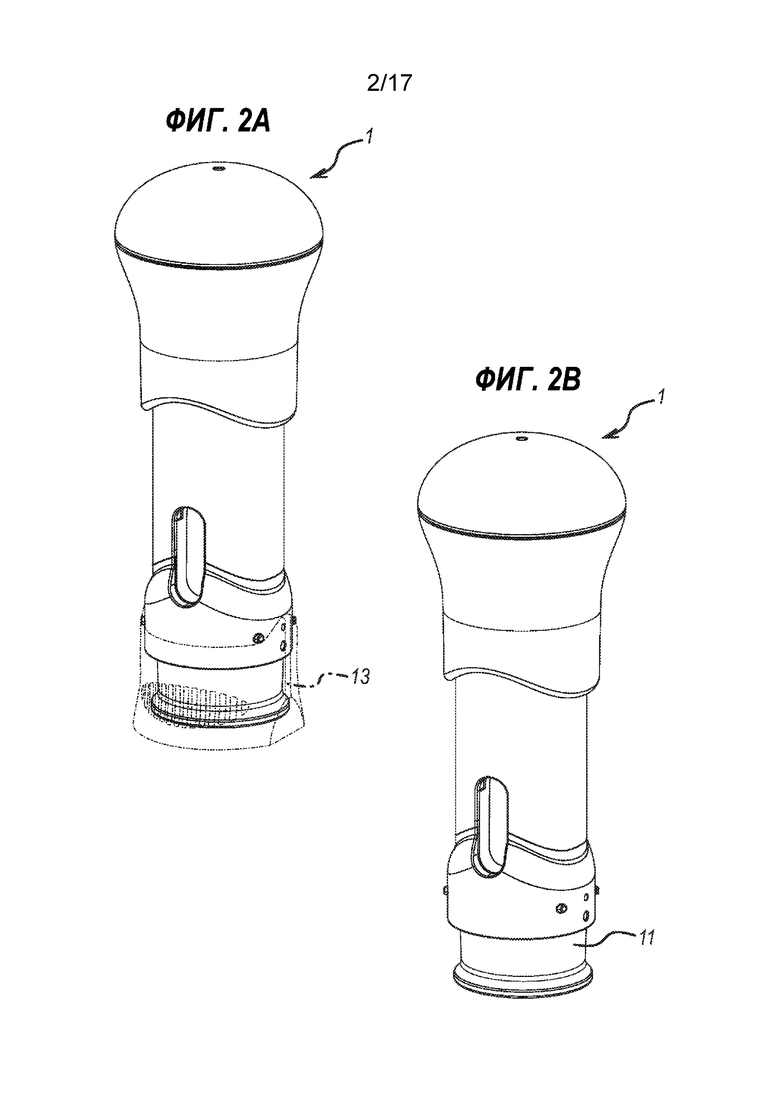
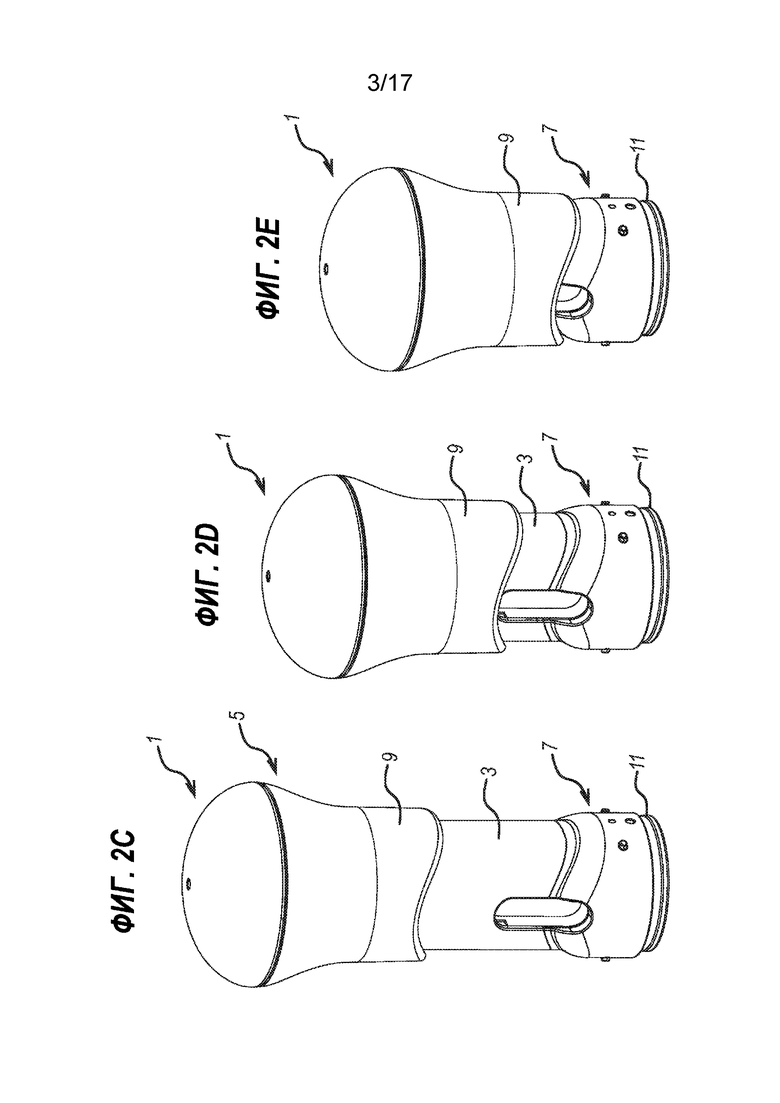
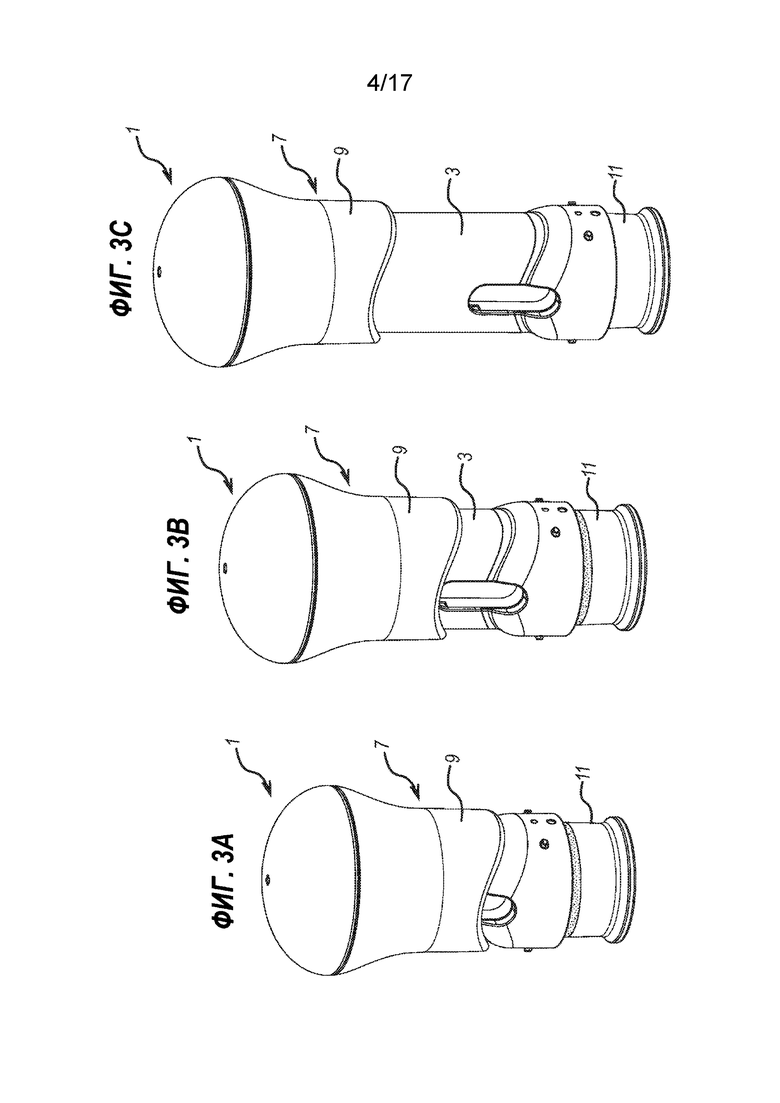
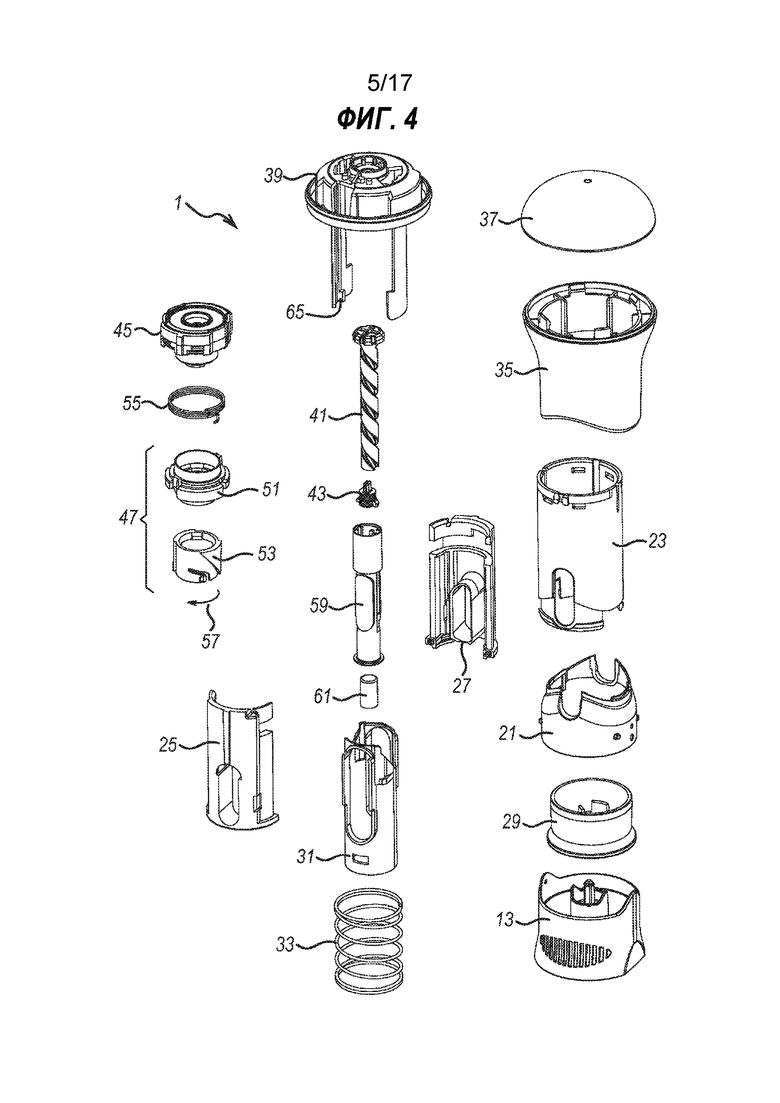
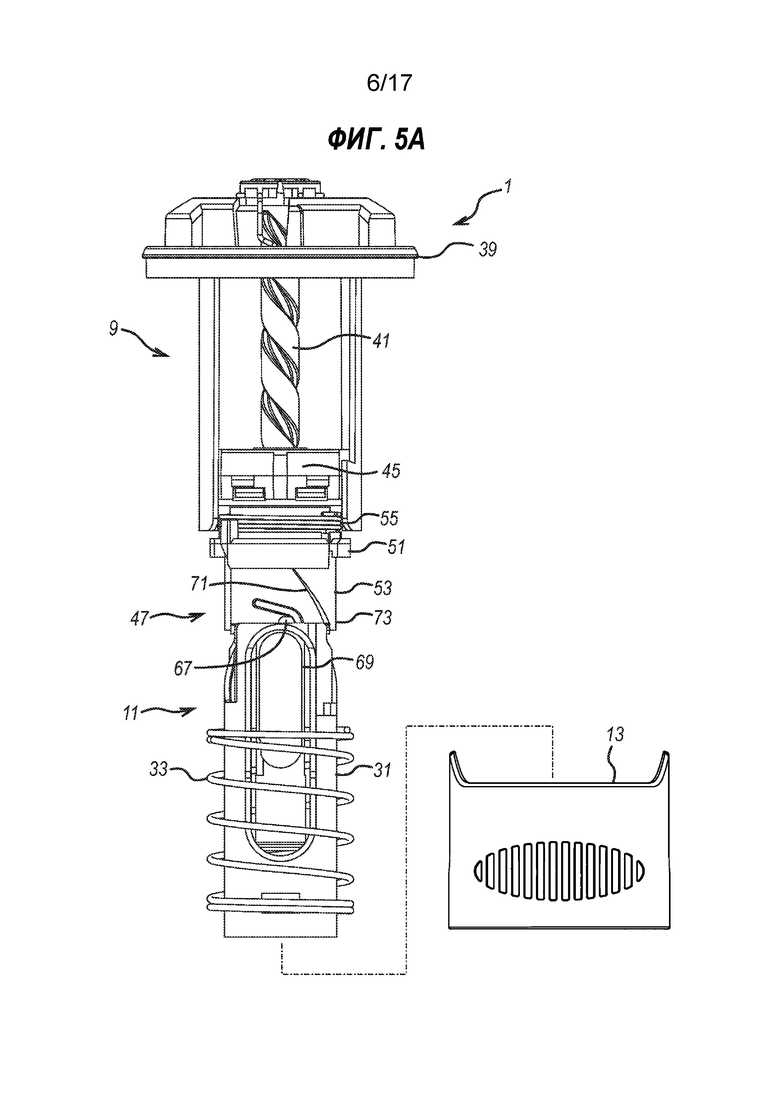
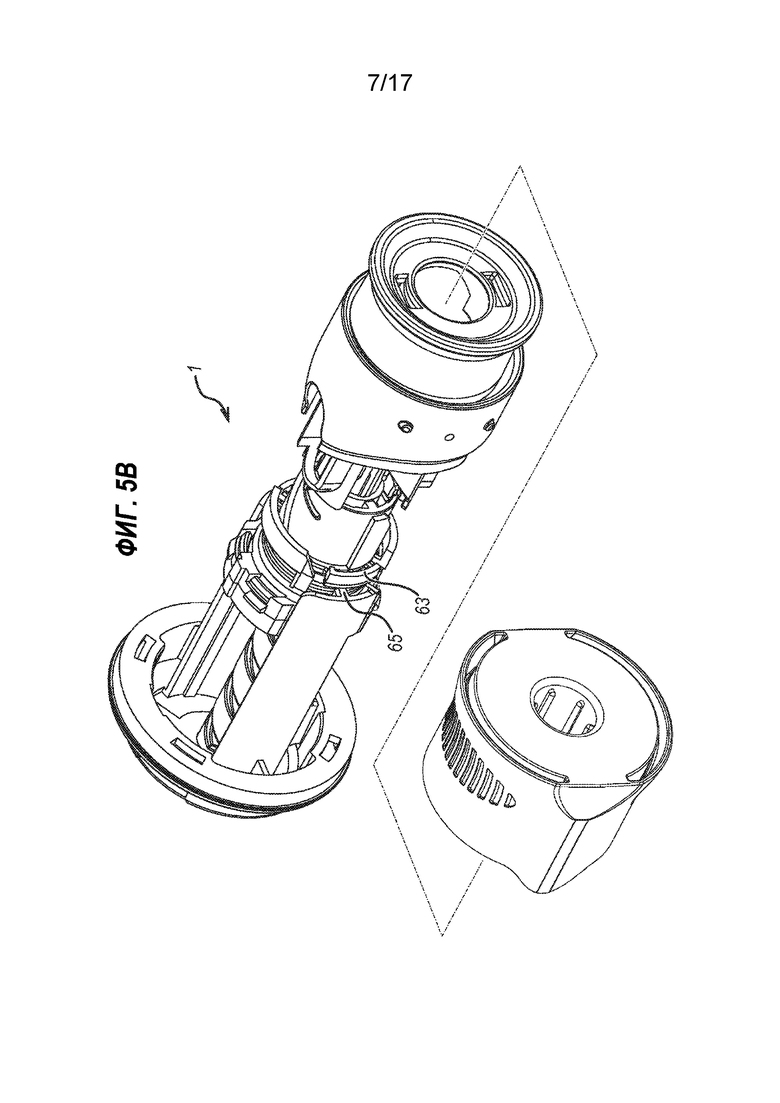
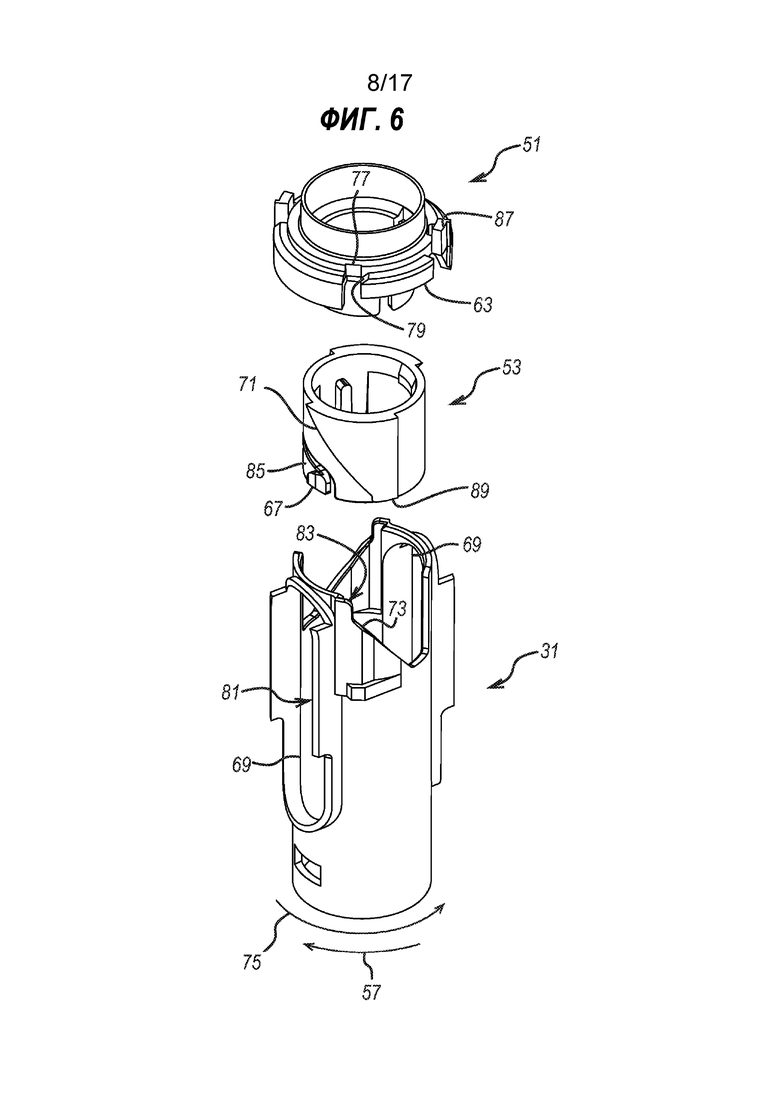
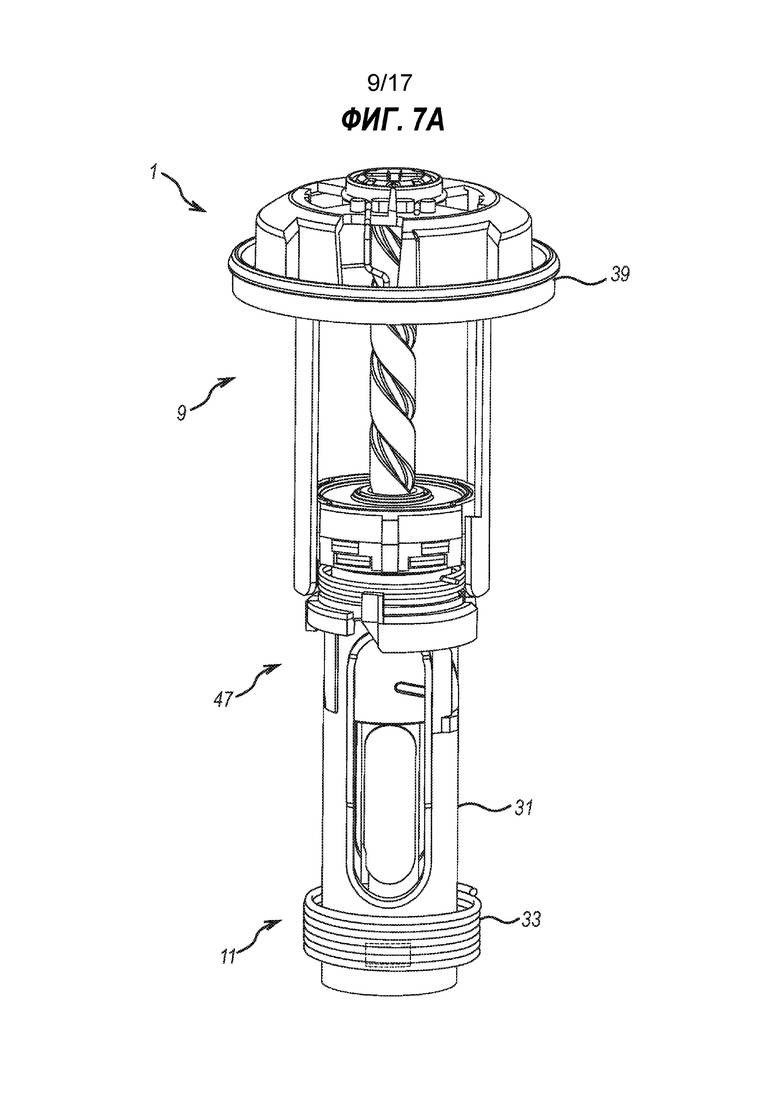
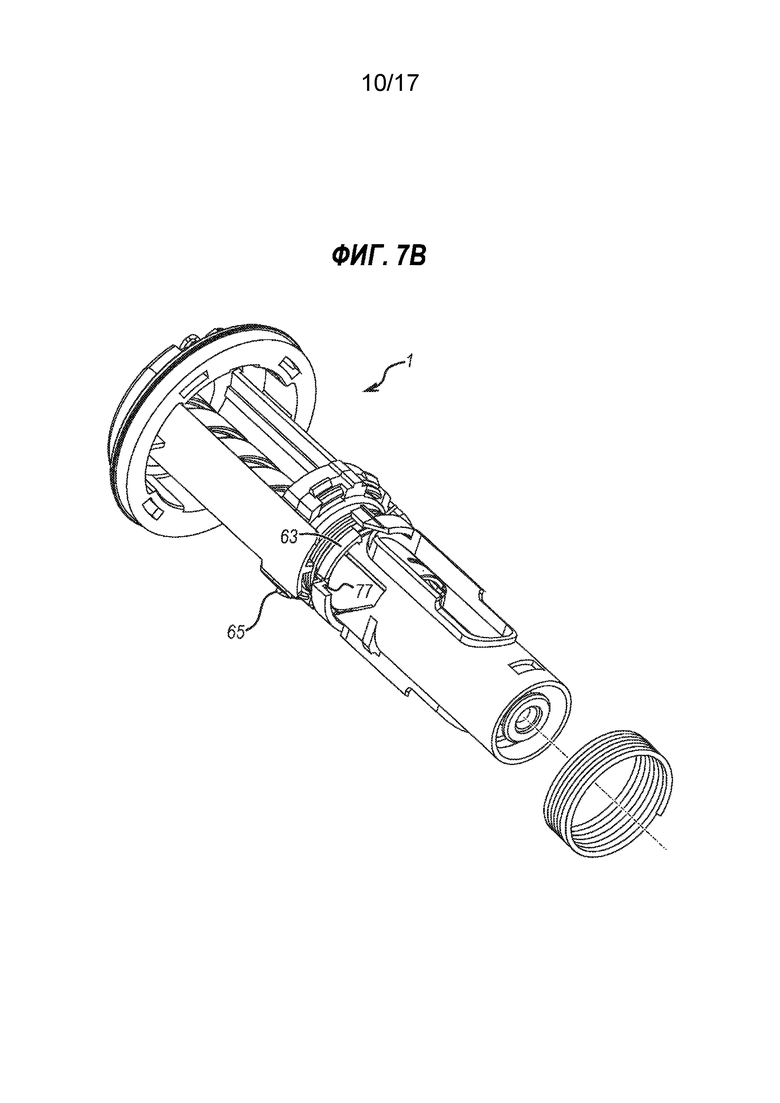
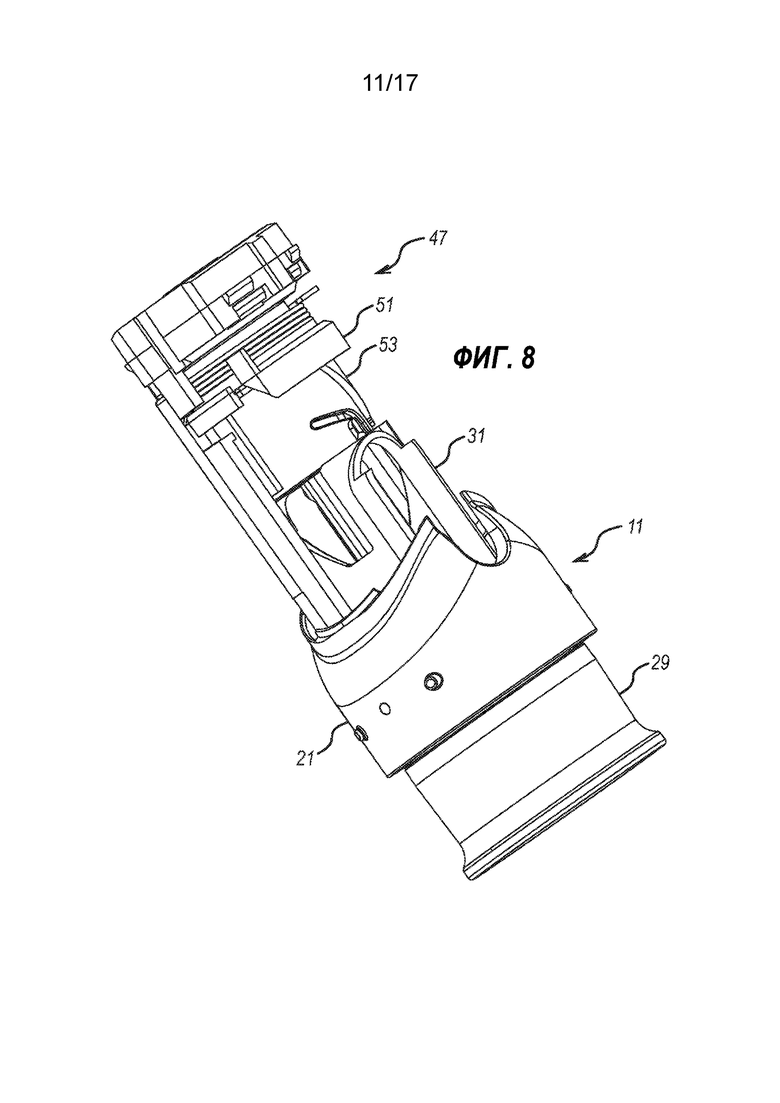
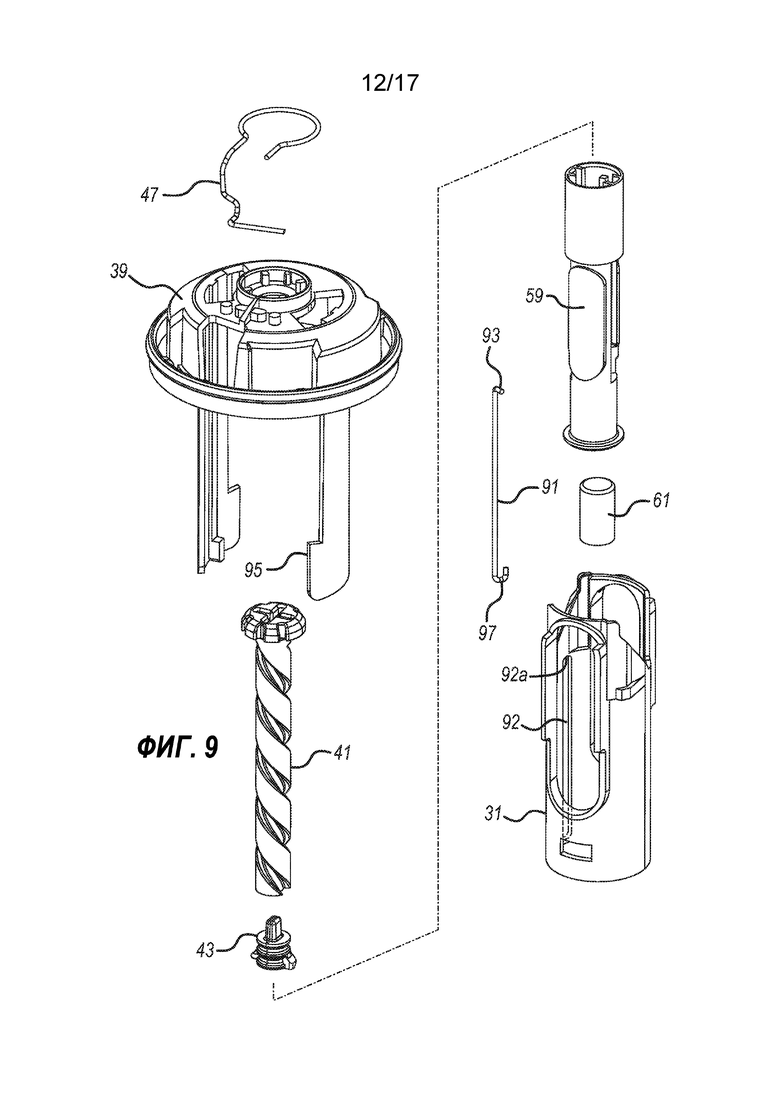
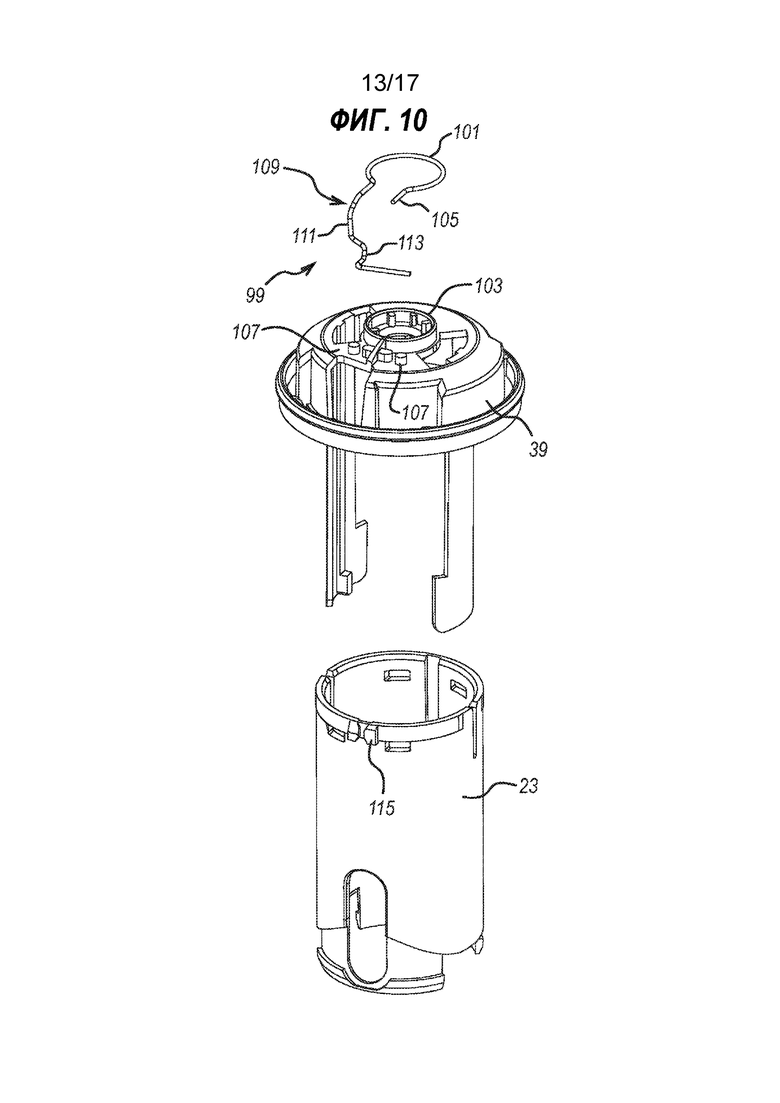
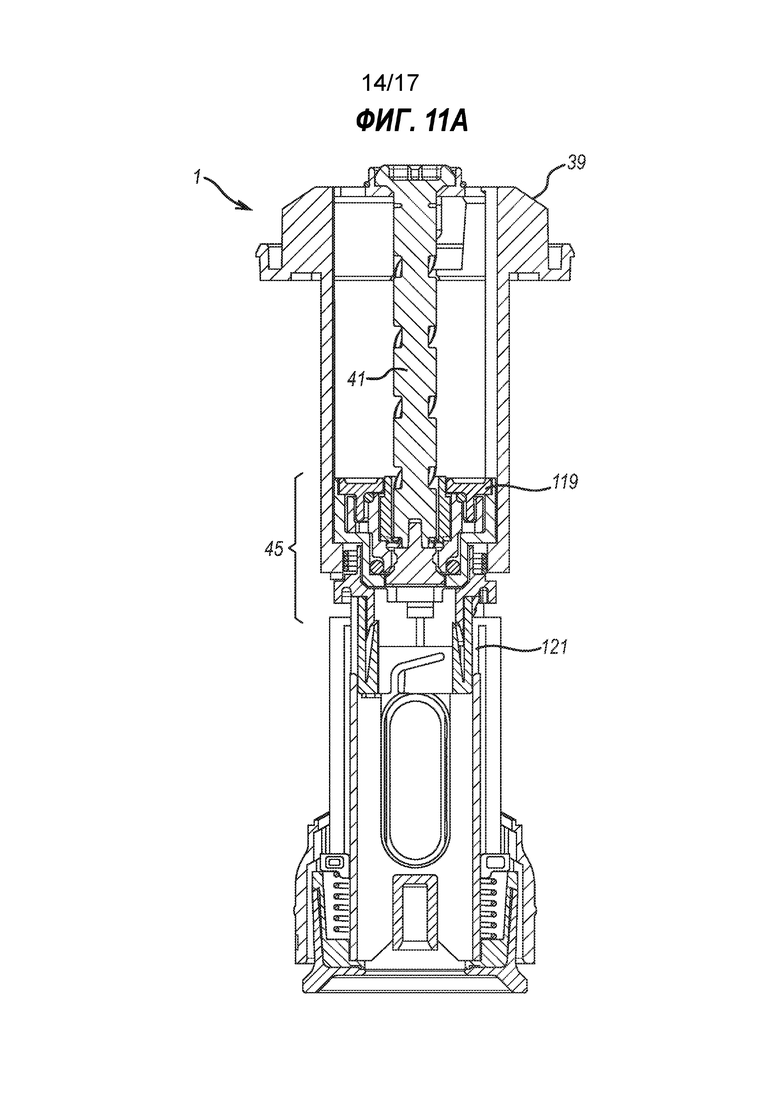
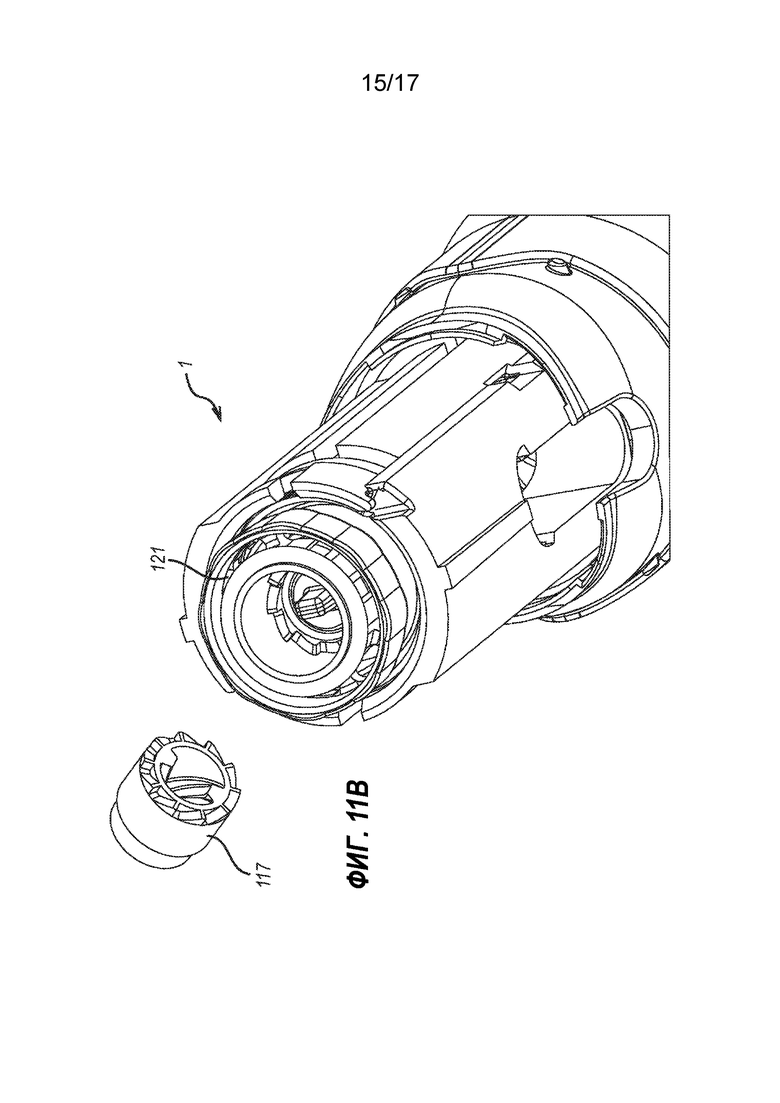
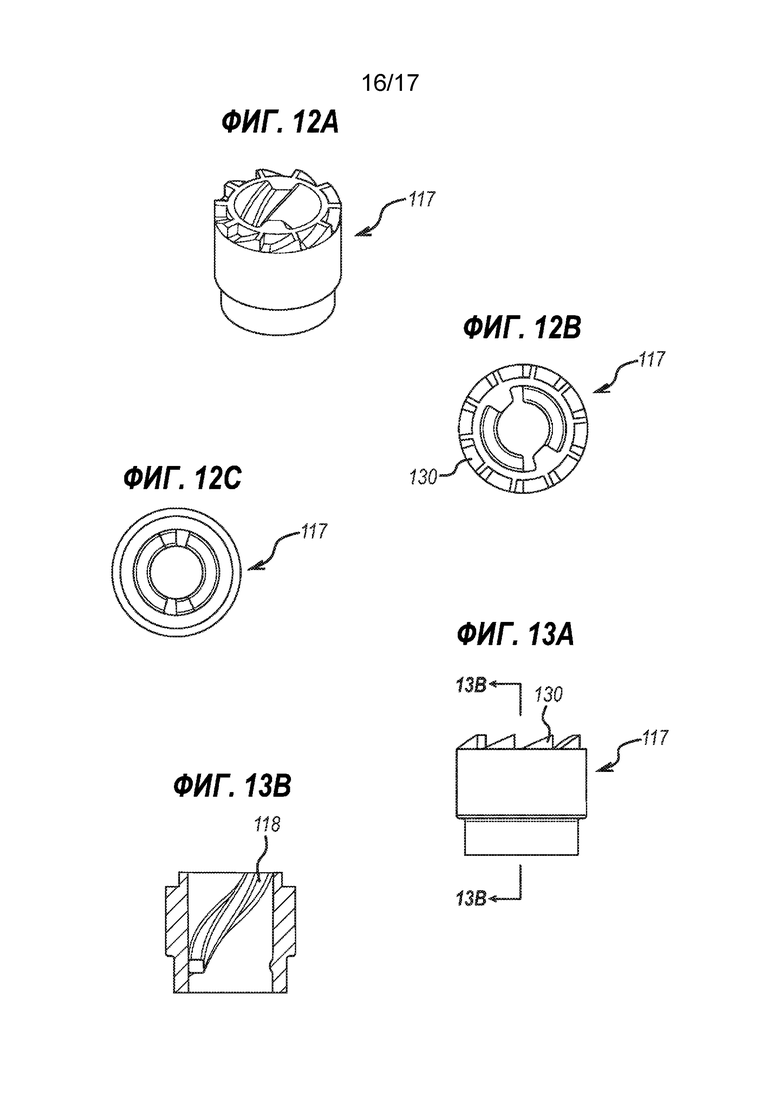
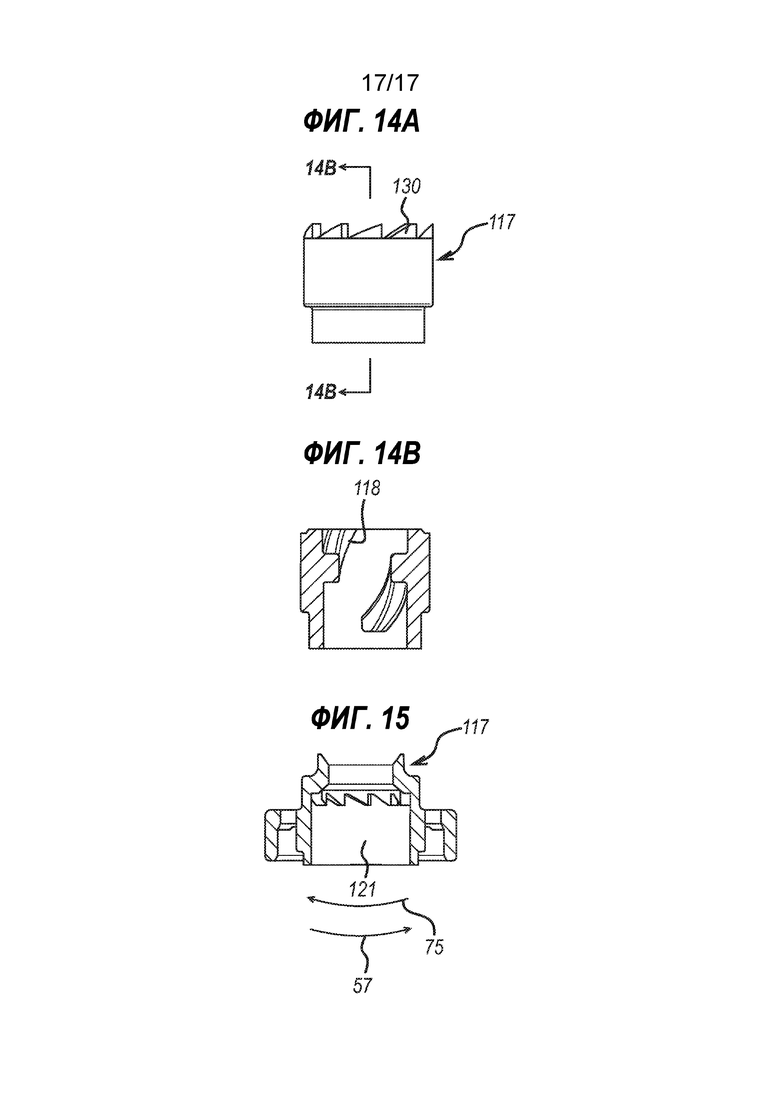
Изобретение относится к медицинской технике, а именно к инъекционным устройствам и тренировочным инъекционным устройствам для обучения пользователя применению инъекционного устройства. Каждое инъекционное устройство и тренировочное инъекционное устройство может включать в себя: корпусный участок; и исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение; причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, таким образом удерживая исполнительный механизм в дистальном положении. 9 н. и 14 з.п. ф-лы, 15 ил.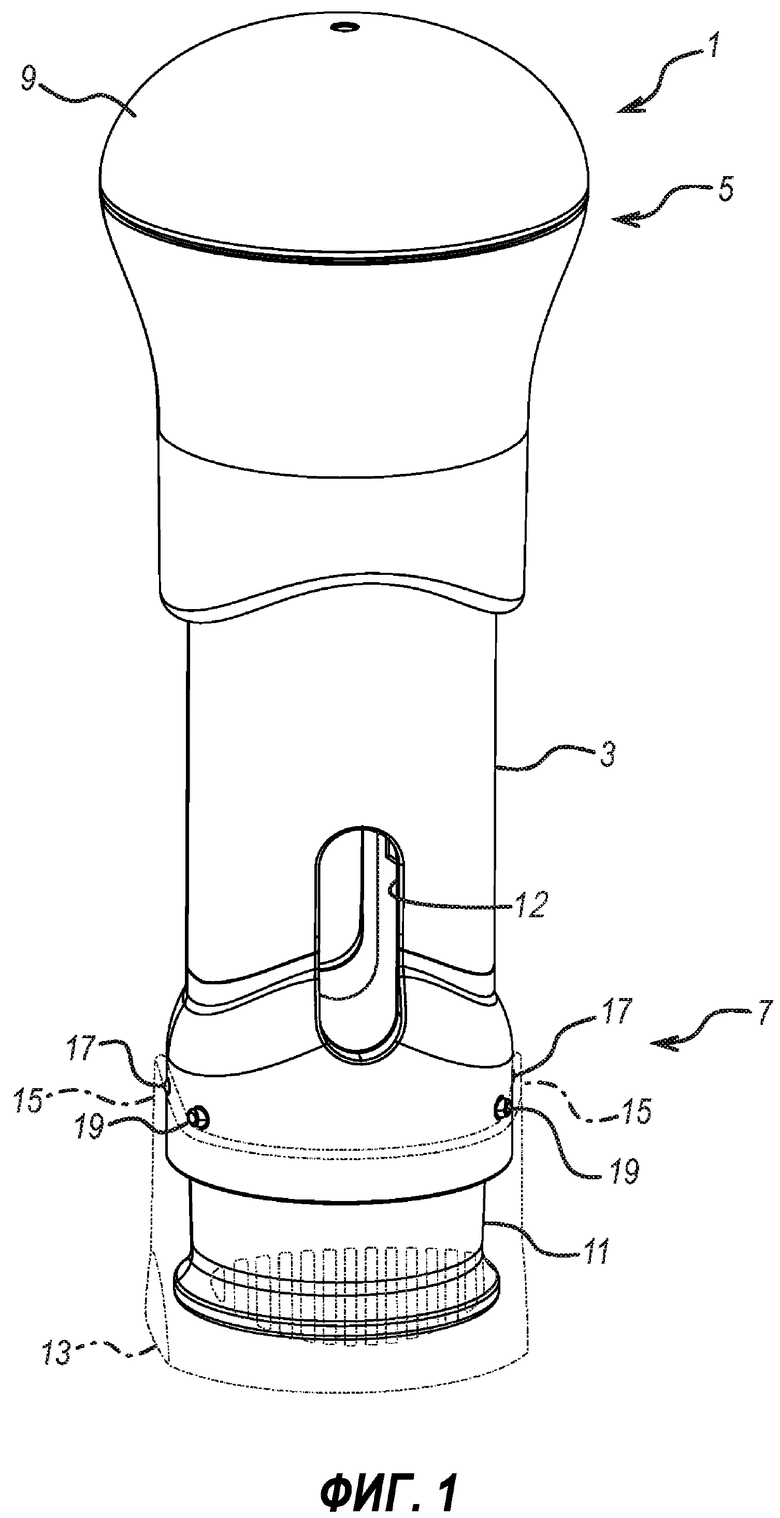
1. Тренировочное инъекционное устройство для обучения пользователя применению инъекционного устройства, содержащее:
корпусный участок; и
исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, таким образом удерживая исполнительный механизм в дистальном положении,
защелка включает упругий элемент, выполненный с возможностью отклонения из исходного положения, когда упругий элемент перемещается из разъединенного состояния, в котором защелка не соединена с выступом корпуса, в соединенное состояние, в котором защелка соединена с выступом корпуса, и
упругий элемент выполнен с возможностью перехода из соединенного состояния в разъединенное, когда к исполнительному механизму прилагается сила, превышающая пороговое значение, при перемещении исполнительного механизма из дистального положения в проксимальное, так что упругий элемент возвращается в исходное положение.
2. Тренировочное инъекционное устройство по п. 1, в котором защелка выполнена с возможностью издавать звуковой сигнал при соединении защелки с выступом корпуса.
3. Тренировочное инъекционное устройство для обучения пользователя применению инъекционного устройства, содержащее:
корпусный участок; и
исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и воспроизведения звукового сигнала,
защелка включает упругий элемент, выполненный с
возможностью отклонения из исходного положения, когда упругий элемент перемещается из разъединенного состояния, в котором защелка не соединена с выступом корпуса, в соединенное состояние, в котором защелка соединена с выступом корпуса, и
упругий элемент выполнен с возможностью перехода из соединенного состояния в разъединенное, когда к исполнительному механизму прилагается сила, превышающая пороговое значение, при перемещении исполнительного механизма из дистального положения в проксимальное, так что упругий элемент возвращается в исходное положение.
4. Тренировочное инъекционное устройство по п. 3, в котором защелка удерживает исполнительный механизм в дистальном положении, когда защелка соединена с выступом корпуса.
5. Тренировочное инъекционное устройство по п. 1 или 3, в котором защелка содержит дефлекторный участок, который выполнен с возможностью стыковки с выступом корпуса для перемещения защелки из разъединенного положения в соединенное положение.
6. Тренировочное инъекционное устройство по п. 5, в котором защелка включает упругий элемент, который содержит дефлекторный участок защелки.
7. Тренировочное инъекционное устройство по пп. 1, 3 или 5, в котором защелка содержит элемент захвата, выполненный с возможностью захвата участка корпуса в соединенном состоянии.
8. Тренировочное инъекционное устройство по п. 7, в котором защелка включает упругий элемент, который содержит элемент захвата.
9. Тренировочное инъекционное устройство по п. 5 и 7, в котором дефлекторный участок защелки и элемент захвата находятся на противоположных сторонах защелки.
10. Тренировочное инъекционное устройство по п. 1 или 3, в котором:
исполнительный механизм соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора; и
тренировочное инъекционное устройство дополнительно содержит демпфирующий элемент, соединенный или выполненный с возможностью соединения с ротором, для замедления вращения ротора.
11. Инъекционное устройство, содержащее:
иглу, соединенную с камерой для хранения текучей среды;
корпусный участок; и
исполнительный механизм, расположенный в направлении проксимального конца корпусного участка, выполненный с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, хранящейся в камере, через иглу;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью (i) изгиба наружу от продольной оси инъекционного устройства и над выступом корпуса, когда исполнительный механизм перемещается в направлении дистального положения, и (ii) возврата внутрь по направлению к продольной оси в положение покоя для соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, таким образом удерживая исполнительный механизм в дистальном положении.
12. Инъекционное устройство по п. 11, в котором:
исполнительный механизм соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора; и
инъекционное устройство дополнительно содержит демпфирующий элемент, соединенный или выполненный с возможностью соединения с ротором с целью замедления вращения ротора.
13. Инъекционное устройство, содержащее:
иглу, соединенную с камерой для хранения текучей среды;
корпусный участок; и
исполнительный механизм, расположенный в направлении проксимального конца корпусного участка, выполненный с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, хранящейся в камере, через иглу;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой, которая выполнена с возможностью (i) изгиба наружу от продольной оси инъекционного устройства и над выступом корпуса, когда исполнительный механизм перемещается в направлении дистального положения, и (ii) возврата внутрь по направлению к продольной оси в положение покоя для контакта с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и воспроизведения звукового сигнала.
14. Инъекционное устройство по п. 13, в котором:
исполнительный механизм соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора; и
инъекционное устройство дополнительно содержит демпфирующий элемент, соединенный или выполненный с возможностью соединения с ротором с целью замедления вращения ротора.
15. Набор, состоящий из отдельных компонентов, для сборки тренировочного инъекционного устройства по любому одному из пп. 1 или 3 или инъекционного устройства по п. 11 или 13.
16. Способ использования тренировочного инъекционного устройства, содержащего:
корпусный участок; и
исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой; и
способ включает:
перемещение исполнительного механизма из проксимального положения в дистальное положение таким образом, что защелка соединяется с выступом корпуса, когда исполнительный механизм находится в дистальном положении, удерживая исполнительный механизм в дистальном положении, причем процесс соединения защелки включает отклонение упругого элемента защелки из исходного положения, когда упругий элемент перемещается из разъединенного состояния, в котором защелка не соединена с выступом корпуса, в соединенное состояние, в котором защелка соединена с выступом корпуса; и
приложение к исполнительному механизму силы, превышающей пороговое значение, приводящее к перемещению исполнительного механизма из дистального положения в проксимальное и перехода упругого элемента из соединенного состояния в разъединенное, так что упругий элемент возвращается в исходное положение.
17. Способ по п. 16, в котором:
исполнительный механизм соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора;
тренировочное инъекционное устройство дополнительно содержит демпфирующий элемент с возможностью соединения с ротором для замедления вращения; и
способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение, в течение которого демпфирующий элемент замедляет вращение ротора и, следовательно, перемещение исполнительного механизма в дистальное положение.
18. Способ использования инъекционного устройства, содержащего:
иглу, соединенную с камерой для хранения текучей среды;
корпусный участок; и
исполнительный механизм, расположенный в направлении проксимального конца корпусного участка, выполненный с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, хранящейся в камере, через иглу;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой; и
способ включает:
перемещение исполнительного механизма из проксимального положения в дистальное положение таким образом, что защелка (i) изгибается наружу от продольной оси инъекционного устройства и над выступом корпуса, когда исполнительный механизм перемещается в направлении дистального положения, и (ii) возвращается внутрь по направлению к продольной оси в положение покоя для соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, удерживая исполнительный механизм в дистальном положении.
19. Способ по п. 18, в котором:
исполнительный механизм соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора;
инъекционное устройство дополнительно содержит демпфирующий элемент, выполненный с возможностью соединения с ротором для замедления вращения ротора; и
способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение, в течение которого демпфирующий элемент замедляет вращение ротора и, следовательно, перемещение исполнительного механизма в дистальное положение.
20. Способ использования тренировочного инъекционного устройства, содержащего:
корпусный участок; и
исполнительный механизм, расположенный по направлению к проксимальному концу корпусного участка, причем исполнительный механизм выполнен с возможностью перемещения из проксимального положения в дистальное положение;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой; и
способ включает:
перемещение исполнительного механизма из проксимального положения в дистальное положение таким образом, что защелка соединяется с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и издает звуковой сигнал, когда защелка соединяется с выступом корпуса, причем процесс соединения защелки включает отклонение упругого элемента защелки из исходного положения, когда упругий элемент перемещается из разъединенного состояния, в котором защелка не соединена с выступом корпуса, в соединенное состояние, в котором защелка соединена с выступом корпуса; и
приложение к исполнительному механизму силы, превышающей пороговое значение, приводящее к перемещению исполнительного механизма из дистального положения в проксимальное и перехода упругого элемента из соединенного состояния в разъединенное, так что упругий элемент возвращается в исходное положение.
21. Способ по п. 20, в котором:
исполнительный механизм соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора;
тренировочное инъекционное устройство дополнительно содержит демпфирующий элемент с возможностью соединения с ротором для замедления вращения; и
способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение, в течение которого демпфирующий элемент замедляет вращение ротора и, следовательно, перемещение исполнительного механизма в дистальное положение.
22. Способ использования инъекционного устройства, содержащего:
иглу, соединенную с камерой для хранения текучей среды;
корпусный участок; и
исполнительный механизм, расположенный в направлении проксимального конца корпусного участка, выполненный с возможностью перемещения из проксимального положения в дистальное положение для дозирования текучей среды, хранящейся в камере, через иглу;
причем корпусный участок оснащен выступом, а исполнительный механизм - защелкой; и
способ включает:
перемещение исполнительного механизма из проксимального положения в дистальное положение таким образом, что защелка (i) изгибается наружу от продольной оси инъекционного устройства и над выступом корпуса, когда исполнительный механизм перемещается в направлении дистального положения, и (ii) возвращается внутрь по направлению к продольной оси в положение покоя для соединения с выступом корпуса, когда исполнительный механизм находится в дистальном положении, и издает звуковой сигнал, когда защелка соединяется с выступом корпуса.
23. Способ по п. 22, в котором:
исполнительный механизм соединен с ротором таким образом, что перемещение исполнительного механизма из проксимального положения в дистальное положение вызывает вращение ротора;
инъекционное устройство дополнительно содержит демпфирующий элемент, выполненный с возможностью соединения с ротором для замедления вращения ротора; и
способ дополнительно включает перемещение исполнительного механизма из проксимального положения в дистальное положение, в течение которого демпфирующий элемент замедляет вращение ротора и, следовательно, перемещение исполнительного механизма в дистальное положение.
| АВТОМАТИЧЕСКОЕ ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2007 |
|
RU2438721C2 |
| US2018008776 A1, 11.01.2018 | |||
| WO2014033195 A1, 06.03.2014. | |||

