Область техники, к которой относится изобретение
Настоящее изобретение относится к радарному уровнемеру, в котором для определения расстояния до продукта в резервуаре используются электромагнитные волны.
Уровень техники
С тех пор как в 70-е и 80-е годы 20 века радарное измерение уровня получило свое развитие в качестве коммерческого продукта, использование непрерывного модулированного по частоте радиоизлучения (FMCW, от англ. «Frequency Modulated Continuous Wave») было и остается преобладающим принципом измерений для областей применения, требующих высокой точности. Измерение посредством FMCW заключается в передаче в резервуар сигнала, качающегося в частотном интервале порядка нескольких гигагерц. Например, сигнал может находиться в интервале 25-27 ГГц или 9,5-11 ГГц. Передаваемый сигнал отражается поверхностью содержимого резервуара (или любой другой границей изменения импеданса), и эхо-сигнал с задержкой на некоторое время возвращается к измерителю. Данный эхо-сигнал смешивают с передаваемым сигналом, чтобы получить смешанный сигнал, частота которого равна изменению частоты передаваемого сигнала за указанное время задержки. Благодаря линейному режиму качания частоты, указанная разностная частота, которую также называют промежуточной частотой (IF, от англ. «Intermediate Frequency»), пропорциональна расстоянию до отражающей поверхности. Смешанный сигнал часто называют IF-сигналом.
Хотя классические FMCW системы являются высокоточными, они отличаются сравнительно высоким энергопотреблением, что делает их менее пригодными для применения там, где возможности питания ограничены. Примерами таких задач являются полевые устройства, питаемые от двухпроводного интерфейса, такого как токовая петля 4-20 мА, и беспроводные устройства, питаемые внутренним источником энергии (например, батарейкой или солнечным элементом).
В патентном документе заявке США 12/981995 того же автора предложен новый принцип измерения, отличающийся меньшим потреблением энергии, заключающийся в передаче серии импульсов, имеющих постоянную частоту несущей волны, причем каждый импульс является долгим по сравнению с временем прохождения (например, длительность импульса имеет порядок от 1 мкс до 100 мс по сравнению с временем прохождения порядка десятых долей микросекунды). Поэтому данный способ измерения называют мультичастотным импульсным способом (MFPW, от англ. «Multiple Frequency Pulsed Wave»).
Числа различных несущих частот радиоизлучения в измерительном цикле не достаточно для обеспечения непрерывного IF-сигнала, или даже для приближения к IF-частоте в способе, реализуемом так называемой «ступенчатой» или «дискретной» FMCW-системой, в которой ступеньки реализуются монотонно, без прерывания питания, чтобы получить непрерывный сигнал. Напротив, небольшой набор частот выбирают в соответствии с конкретной частотной схемой, и для каждой частоты определяют фазовый сдвиг в принятом импульсе.
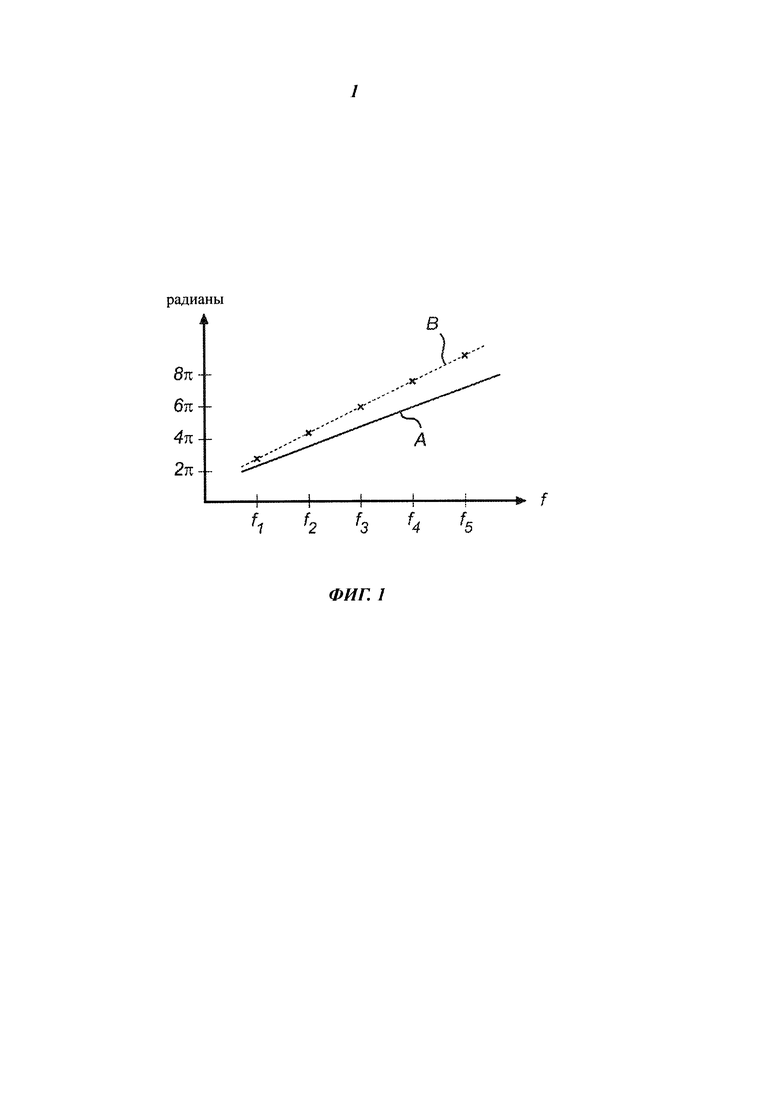
Процесс измерения расстояния до поверхности включает в себя установление изменения фазы с излучаемой частотой (см. фиг. 1). Линия А представляет начальную оценку расстояния, тогда как линия В представляет уточненную оценку. Теоретически, для определения скорости изменения (наклона линии В) требуются только два значения (точки х), тогда как на практике может потребоваться большее число точек, например несколько сотен замеров. Такая группа замеров может быть названа измерительным циклом и может служить заменой FMCW-сигналу. В начале процесса (когда не известно никакого приближенного значения расстояния) требуется большее число замеров, так же как и в более сложных случаях (турбулентность, возмущающее эхо и т.п.). В начале процедуры могут использоваться замеры, аналогичные традиционному FMCW-сигналу.
Чтобы дополнительно уменьшить энергопотребление, полную процедуру измерения расстояния желательно проводить, только когда это требуется, т.е. когда поверхность переместилась со времени последнего измерения.
Сущность изобретения
Целью настоящего изобретения является создание усовершенствованной системы для радарного измерения уровня, использующей импульсы постоянной частоты, которые являются длительными по сравнению с временем прохождения, при этом данная система способна определять перемещение поверхности, не выполняя при этом полный цикл измерений.
Эта и другие цели были достигнуты за счет способа определения расстояния до поверхности продукта, находящегося в резервуаре, причем данный способ содержит шаги, на которых: передают электромагнитные передаваемые сигналы в направлении указанной поверхности; принимают ответные электромагнитные сигналы, отраженные от указанной поверхности, при этом указанные передаваемые сигналы содержат по меньшей мере одну пару разделенных во времени отдельных импульсов на несущей волне, имеющих одинаковую частоту, при этом каждый импульс имеет длительность, которая превышает 1 микросекунду, но меньше 100 миллисекунд; определяют фактические фазовые параметры каждого отдельного принимаемого импульса по отношению к каждому соответствующему отдельному передаваемому импульсу; определяют изменение фактической фазы между двумя импульсами; сравнивают указанное изменение с пороговым значением; и в зависимости от результата шага сравнения определяют расстояние на основании соотношения передаваемых сигналов и ответных сигналов.
Данная цель также достигается за счет системы измерения уровня для определения расстояния до поверхности продукта в резервуаре, содержащей: приемопередатчик для передачи электромагнитных передаваемых сигналов и приема электромагнитных ответных сигналов, отраженных от поверхности, причем приемопередатчик выполнен с возможностью передачи сигналов, содержащих по меньшей мере одну пару разделенных во времени отдельных импульсов на несущей волне, имеющих одинаковую частоту, при этом каждый импульс имеет длительность, которая превышает 1 микросекунду, но меньше 100 миллисекунд; схему обработки, выполненную с возможностью определения фактических фазовых параметров каждого отдельного принятого импульса по отношению к каждому соответствующему отдельному передаваемому импульсу; определения изменения фазового сдвига между двумя импульсами; сравнения указанного изменения с пороговым значением; и, в зависимости от результата сравнения, определения указанного расстояния на основании соотношения между передаваемыми сигналами и ответными сигналами.
Посредством сравнения фактической фазы, полученной от двух, по существу, идентичных импульсов, переданных с определенным временным интервалом, может быть получен показатель изменения уровня заполнения резервуара. Этот показатель затем может быть использован для инициирования полного цикла измерения.
Под «одинаковыми частотами» понимаются частоты, которые настолько сходны, что фазовые сдвиги этих частот можно сравнивать и использовать как показатель смещения поверхности. К примеру, отклонение между двумя одинаковыми несущими частотами может составлять менее 1/1000. Такая погрешность может быть обеспечена контуром управления с обратной связью, например схемой фазовой автоподстройки частоты (ФАПЧ).
При работе уровнемера в частотной области 25 ГГц изменение уровня на 1 мм будет давать изменение фазы приблизительно на 60°. При работе уровнемера в частотной области 10 ГГц, соответствующее изменение фазы составит около 24°. Разность фаз 15°-20° можно описать, как изменение на -10 дБ, что может быть надежно обнаружено. Таким образом, для указанных двух рабочих частот чувствительность можно оценить как приблизительно 0,3 мм и 0,8 мм соответственно. Обычная скорость перекачки для резервуара (при заполнении или опорожнении) может составлять от одного до нескольких сантиметров в минуту, то есть за период в 10 с изменение уровня составит несколько миллиметров, что может быть надежно обнаружено.
Согласно одному варианту осуществления изобретения, полный передаваемый сигнал, содержащий достаточную информацию для определения расстояния, передается всегда, а обработка для определения расстояния выполняется, только если обнаружено достаточно большое изменение фазы между импульсами, которым соответствуют одинаковые частоты.
Согласно другому варианту осуществления изобретения, уровнемер может работать в первом режиме и втором режиме, причем определение расстояния производится в первом рабочем режиме, а определение изменения фазового сдвига производится во втором рабочем режиме. Выбор первого рабочего режима производится в зависимости от результата шага сравнения.
Тогда во втором рабочем режиме уровнемер может вести контроль поверхности, а выбор первого рабочего режима может производиться, только когда обнаруживается перемещение поверхности.
Предпочтительно, средняя передаваемая мощность во втором рабочем режиме ниже, чем в первом рабочем режиме. Тогда при контроле поверхности расходуется меньше энергии, но больше энергии расходуется при определении уровня заполнения резервуара, когда обнаружено смещение поверхности.
Во втором режиме передаваемые сигналы могут включать в себя множество разделенных во времени групп импульсов, каждая из которых содержит по меньшей мере два импульса с разной частотой, при этом по меньшей мере один импульс в каждой группе импульсов имеет частоту, одинаковую с частотой импульса из предшествующей группы импульсов. Тогда можно определить множество изменений фазового сдвига, относящихся к различным парам импульсов, имеющих одинаковую частоту.
В соответствии с данным вариантом осуществления, определение того, смещается уровень или нет, может быть основано на нескольких парах идентичных импульсов, что может сделать определение более надежным.
Согласно другому варианту осуществления изобретения, по меньшей мере один импульс из каждой группы импульсов имеет частоту, которая не входит в предыдущую группу. Другими словами, одну или несколько частот в группе импульсов можно заменить от одной группы к другой, при этом одну или несколько частот можно оставлять неизменными. Таким образом, определение изменения фазового сдвига можно производить после каждой группы импульсов, но для разных частот.
Полное измерение расстояния можно выполнять в соответствии с любым способом, включая технологию MFPW, FMCW, ступенчатую технологию FMCW, импульсную технологию TDR и т.п.
Частотная схема в системе MFPM-типа может быть реализована таким образом, чтобы серия импульсов включала в себя импульсы с одинаковыми частотами, которые разделены во времени на определенный период.
Краткое описание чертежей
Далее настоящее изобретение будет раскрыто более подробно со ссылками на прилагаемые чертежи, представляющие предпочтительные варианты осуществления изобретения.
На фиг. 1 изображен график зависимости фазы от передаваемых частот.
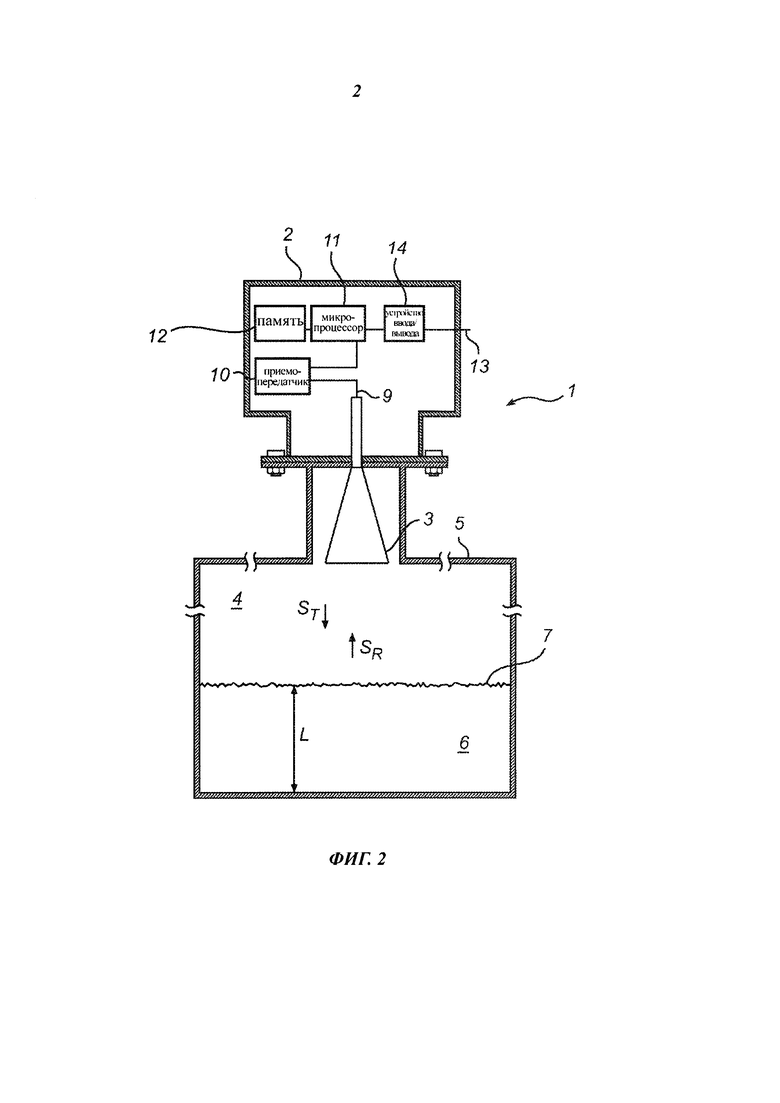
На фиг. 2 изображена блок-схема радарного уровнемера, установленного на резервуаре.
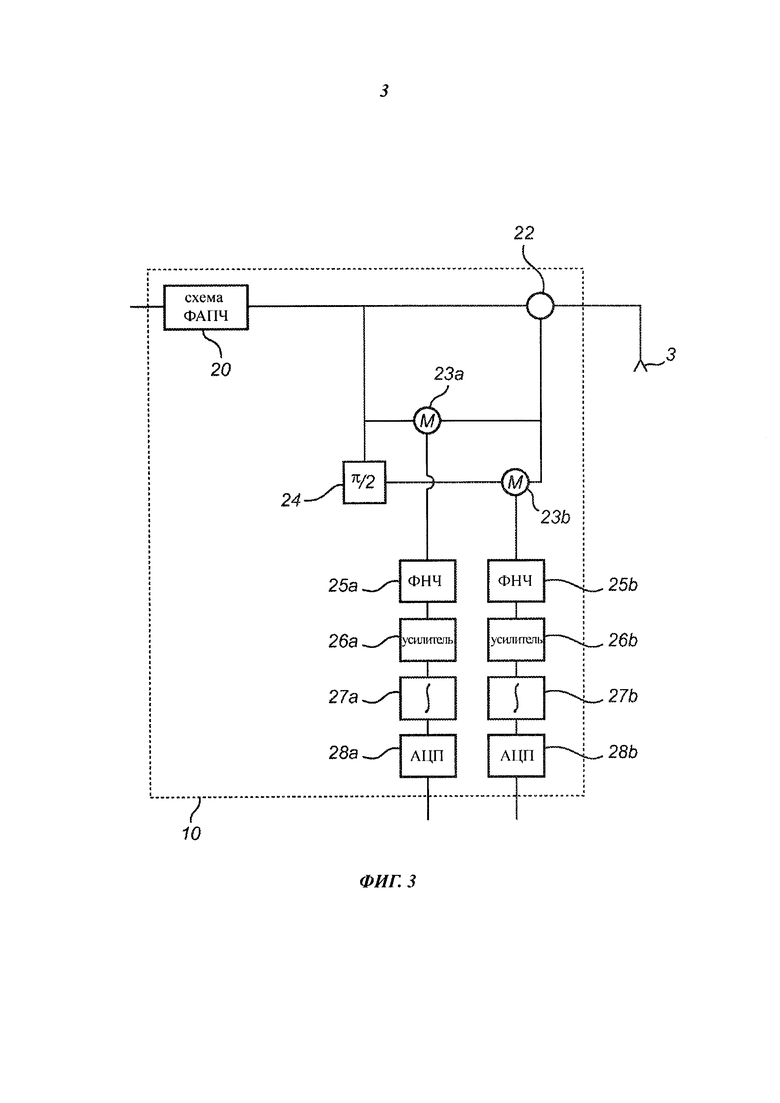
На фиг. 3 изображена более подробная блок-схема приемопередатчика, показанного на фиг. 2 согласно первому варианту осуществления настоящего изобретения.
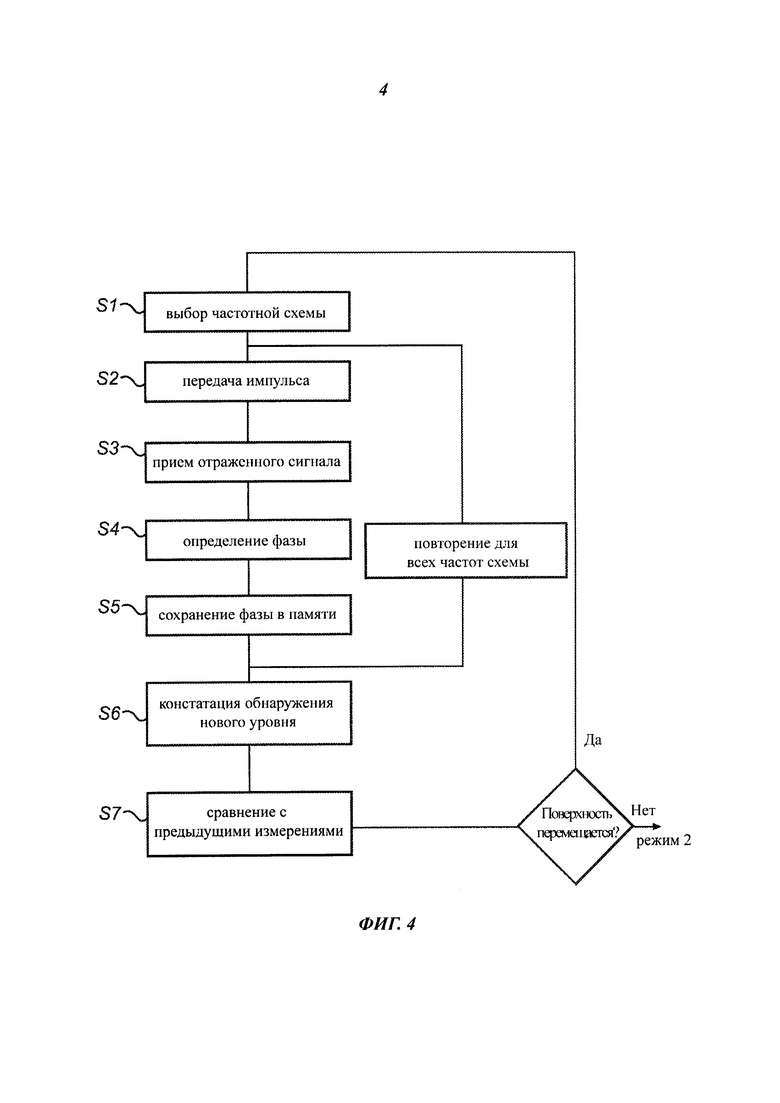
На фиг. 4 представлена блок-схема алгоритма первого рабочего режима уровнемера, показанного на фиг. 2.
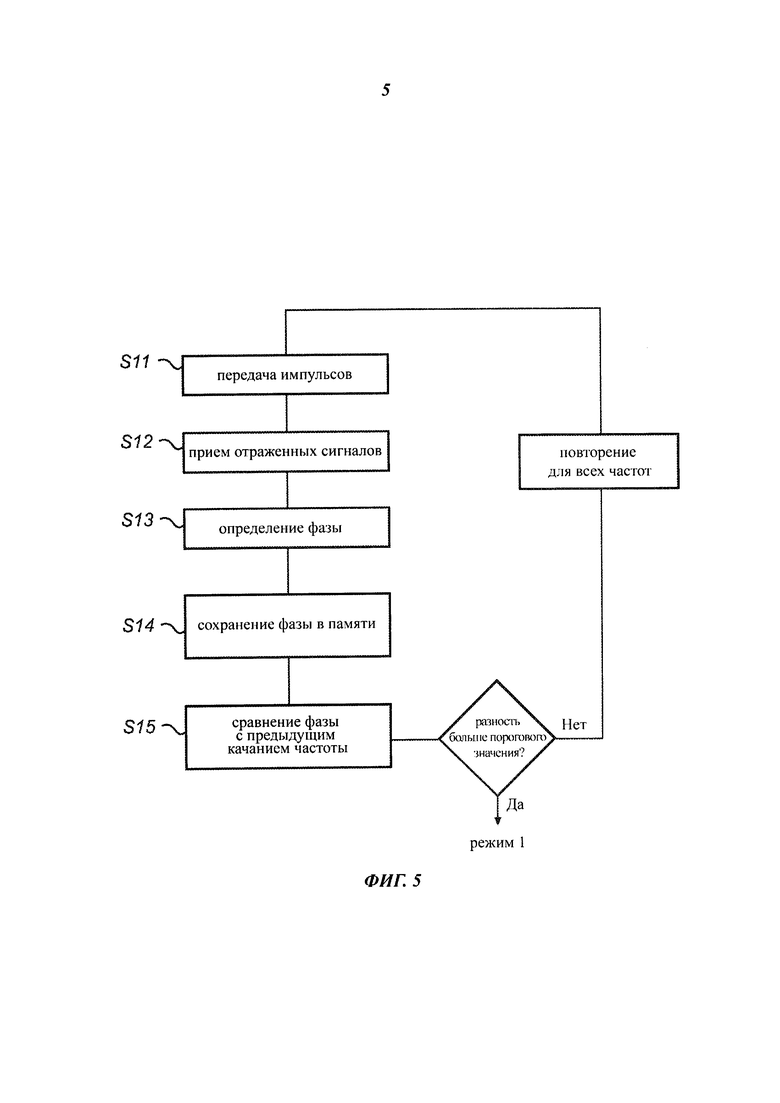
На фиг. 5 представлена блок-схема алгоритма второго рабочего режима уровнемера, показанного на фиг. 2.
Подробное раскрытие предпочтительных вариантов осуществления
В данном описании варианты осуществления настоящего изобретения в основном раскрываются применительно к радарной системе измерения уровня, содержащей антенну свободного распространения волн для излучения и захвата электромагнитных сигналов. Следует отметить, что это ни в коей мере не ограничивает объем заявленного изобретения, которое равным образом применимо и к другим устройствам распространения сигнала, включая другие антенны свободного распространения волн, такие как штыревые антенны, прямоугольные микрополосковые антенны, фиксированные или подвижные параболические или конические антенны, а также волноводы типа неподвижной трубы, передающей линии или зонда, например, однопроводной зонд (включая так называемый зонд Губо), двухпроводной зонд или коаксиальный зонд.
Кроме того, принципом работы раскрытого ниже уровнемера является принцип MFPW, как раскрыто в патентной заявке США 12/981995. Однако следует понимать, что принцип работы для осуществления определения уровня может быть любым, включая FMCW и импульсное измерение уровня с использованием рефлектометрии с временным разрешением.
Специалистам в данной области должно быть понятно, что способ FMCW включает в себя передачу сигнала с качанием частоты в некотором интервале частот, и определение расстояния на основании соотношения между переданным сигналом с качанием частоты и отраженным сигналом с качанием частоты. Импульсное измерение уровня заключается в передаче последовательности коротких импульсов и определении расстояния на основании времени прохождения каждого импульса. На фиг. 2 схематически изображена система 1 радарного измерения уровня согласно одному из вариантов осуществления настоящего изобретения, содержащая: измерительный электронный блок 2 и устройство распространения сигнала, в данном случае - рупорную антенну 3. Система 1 радарного измерения уровня находится на резервуаре 5, который частично заполнен продуктом 6, уровень которого необходимо измерять. В случае, представленном на фиг. 1, продукт 6 является твердым, например представляет собой зерно или гранулы пластмассы, измерение которых, как известно, является трудной задачей, требующей от системы радарного измерения уровня сравнительно высокой чувствительности измерения. Анализируя передаваемые сигналы ST, излучаемые антенной 3 в направлении поверхности 7 продукта 6, и эхо-сигналы SR, идущие от поверхности 7 в обратном направлении, измерительный электронный блок 2 может определить расстояние между реперным положением и поверхностью 7 продукта 6, на основании чего может быть вычислен уровень L наполнения. Следует отметить, что хотя в настоящем описании рассматривается резервуар 5, содержащий продукт 6, аналогичным образом может быть измерено расстояние до любой границы раздела материалов в резервуаре 5.
Как схематически показано на фиг. 2, электронный блок 2 содержит приемопередатчик 10 для передачи и приема электромагнитных сигналов, который соединен с антенной 3 через волновод 9. Блок 2 дополнительно содержит схему 11 обработки, которая соединена с приемопередатчиком 10 для управления приемопередатчиком и для обработки сигналов, принимаемых приемопередатчиком с целью определения уровня заполнения резервуара 5 продуктом 6. Схема обработки 11 также соединена с памятью 12, в которой хранится все программное обеспечение, необходимое для работы измерительной системы 1, а также находится ОЗУ (RAM), используемое при работе.
Схема 11 обработки также может быть соединена с внешними коммуникационными линиями 13 для обмена аналоговыми/цифровыми данными через интерфейс 14. К примеру, связь между интерфейсом 14 и внешним пультом управления (не показан) может быть осуществлена по двухпроводному интерфейсу, который может выполнять комбинированную функцию - как передачи результата измерения на пульт управления, так и приема питания для работы измерительной системы 1. Регулирование тока в линиях осуществляется в соответствии с результатом измерения, который определяет схема 11 обработки.
Как вариант, измеритель может обмениваться данными с пультом управления по беспроводному каналу с использованием, например, беспроводного протокола HART, и в нем может быть использован местный источник питания на батареях или других средствах получения энергии для автономной работы.
Хотя на фиг. 2 рассматриваемые устройства показаны в виде отдельных блоков, некоторые из них: приемопередатчик 10, схема 11 обработки и интерфейс 12 могут быть собраны на одной и той же схемной плате.
На фиг. 3 схематически изображен пример приемопередатчика 10, подходящего для осуществления настоящего изобретения.
Для формирования импульсов несущей волны с вполне определенной, точно управляемой несущей частотой предусмотрен генератор 20 сигналов. Погрешность должна быть менее 1/1000, а предпочтительно - менее 1/10000 или меньше. Это может быть достигнуто системой управления с обратной связью, а генератор сигналов может представлять собой, например, контур с фазовой автоподстройкой частоты (ФАПЧ).
В рассматриваемом примере, длительность импульса предположительно будет равна приблизительно 2 мс, но также возможны и значительно более короткие импульсы, например, порядка микросекунды. Следует отметить, что в контексте измерения уровня в резервуаре длительность импульсов порядка микросекунды или миллисекунды слишком велика, чтобы дать возможность осуществления импульсного способа измерения расстояния методом рефлектометрии с временным разрешением, т.е. путем приема отраженного импульса и определения времени его прохождения. Таким образом, импульсы, соответствующие настоящему изобретению, имеют большую длительность, чем в случае традиционных радарных импульсных измерителей, в которых обычная длительность импульсов имеет порядок наносекунд.
Средняя мощность импульсов может лежать в нановаттной или микроваттной области. Однако коэффициент заполнения, т.е. соотношение длительности импульсов и промежутков между ними, должен быть ограничен величиной менее 50%, а в предпочтительном случае - значительно меньшей величиной, например 5% или даже, 1% или менее. Для коэффициента заполнения 1% может быть удовлетворительной средняя мощность 1-50 мкВт. По сравнению с традиционной технологией FMCW это означает, что можно осуществлять излучение импульсов сравнительно высокой мощности, не увеличивая при этом средней мощности для измерительного цикла.
Импульсы представляют собой обычные радарные импульсы с несущей частотой в гигагерцевой области. Интервал частот может составлять порядка 10% от рабочей частоты и может лежать, например, между 25 ГГц и 27 ГГц или между 9,5 ГГц и 11 ГГц. Число N частот, предпочтительно, может быть определено исходя из условий, которые преобладают в резервуаре. Длительностью импульсов, коэффициентом заполнения и частотой ФАПЧ управляет процессор 11 (см. фиг. 2).
Передаваемый сигнал, формируемый генератором 20 сигналов, будет содержать импульсы с одинаковой несущей частотой, разделенные заданным промежутком времени. Эти одинаковые несущие частоты могут быть выбраны из заранее заданного набора частот, при этом идентичные импульсы могут быть включены в последовательности сомкнутых импульсов, которые имеют разные несущие частоты. В ином варианте, между идентичными импульсами не производится передача никаких импульсов.
Для направления сигнала от генератора 20 сигналов к антенне 3 в резервуаре 5, и для направления отраженных сигналов от антенны 3 к приемной секции приемопередатчика 10 предусмотрен циркулятор или делитель мощности, такой как делитель мощности Уилкинсона (WPD от англ. «Wilkinson Power Divider»).
Приемная секция содержит два канала, синфазный канал (I) и квадратурный канал (Q), каждый из которых содержит смеситель 23а, 23b для синхронного смешивания принятого сигнала. На первый смеситель 23а передаваемые импульсы подаются непосредственно от схемы ФАПЧ 20 (I-канал). На второй смеситель 23b передаваемые импульсы подаются от схемы ФАПЧ 20 через фазовращатель 24 (Q-канал) со сдвигом на 90°.
Каждый канал содержит фильтр 25а, 25b нижних частот и усилитель 26а, 26b. Фильтры и усилители улучшают отношение сигнал/шум системы радарного измерения уровня.
Фильтры 25а, 25b нижних частот, предпочтительно, имеют полосу пропускания, соответствующую обратной ширине импульса. Другими словами, если длительность импульса равна 2 мс, то подходящий фильтр будет иметь ширину полосы пропускания 500 Гц. Таким образом, можно использовать более длительные импульсы для увеличения чувствительности (более узкая полоса) за счет средней мощности или темпа обновления. Однако, если для достижения низкого среднего энергопотребления требуется низкий коэффициент заполнения, то импульсы следует выдерживать достаточно короткими, а полоса пропускания фильтров 25а, 25b нижних частот должна быть шире (чувствительность будет ниже), чем в традиционной системе FMCW.
Затем сигналы подаются на два интегратора 27а, 27b для их интегрирования по длительности импульса. Наконец, для аналого-цифрового преобразования интегрированных сигналов предусмотрены два АЦП 28а, 28b, от которых цифровые выходные сигналы подаются на процессор 11 для хранения и обработки.
Опционально, схема ФАПЧ 20 может быть соединена с модулятором (не показан) для частотной модуляции импульсов, поступающих от схемы ФАПЧ 20. Такая модуляция описана более подробно в патентной заявке США 12/981995, которая включена в настоящее описание посредством ссылки. При такой модуляции вводится зависимость от расстояния, что может иметь преимущества при определения расстояния.
Необходимо отметить, что изображенную на фиг. 3 схему приемопередатчика с двумя параллельными каналами (I и Q) приемника не следует рассматривать как ограничение идеи изобретения.
Например, к смешиванию РЧ сигналов в смесителях 23а, 23b может быть применен последовательный подход, т.е. иной вариант получения I- и Q-фазовых величин. Такой подход может уменьшить число компонентов за счет увеличения числа импульсов, приходящихся на одно измерение.
Работа радарного уровнемера, изображенного на фиг. 2 и 3, будет далее рассмотрена со ссылкой на фиг. 4 и 5, на которых представлены блок-схемы алгоритмов двух различных режимов работы. На фиг. 4 представлена процедура, описанная в патентной заявке США 12/981995, которая включена в настоящее описание посредством ссылки, и которая подходит для слежения за подвижным уровнем поверхности, т.е. во время заполнения или опорожнения резервуара. На фиг. 5 представлена процедура, подходящая для контроля стабильного, не меняющегося уровня поверхности, например, в период, когда резервуар не опорожняют и не добавляют в него содержимого.
Согласно фиг. 4, на шаге S1 в соответствии с заданной процедурой производится определение частотной схемы. При благоприятных условиях измерения (отсутствии турбулентности) схема может включать порядка 10 частот. При более сложных условиях может оказаться необходимым включить несколько сотен частот. Интервал частот может составлять порядка 10% от рабочей частоты, и он может быть, например, между 25 и 27 ГГц или между 9,5 и 11 ГГц.
Затем на шагах S2-S4 осуществляется измерительный цикл с выбранными частотами, в выбранном порядке. Для каждой частоты схема ФАПЧ 20 формирует импульс установленной длительности, например 2 мс, и передает в качестве сигналов ST в резервуар посредством антенны 3 (шаг S2).
Переданные электромагнитные сигналы ST отражаются в резервуаре 5 на границах раздела сред (перехода импеданса), включая поверхность 7 продукта 6, содержащегося в резервуаре, и возвращаются к приемопередатчику 10 в виде эхо-сигналов от антенны 3. Отраженные сигналы SR принимаются (на шаге S3) двумя каналами (I и Q) приемной секции приемопередатчика 10.
Затем на шаге S4 процессором 11 по выходным сигналам двух каналов посредством стандартной I/Q обработки производится определение разности фаз переданного импульса и отраженного импульса. Каждый сдвиг фазы записывается в память 13 (шаг S5), и шаги S2-S5 повторяются для всех частот схемы.
На шаге S6 процессор 11 соотносит каждую величину разности фаз с ожидаемым значением разности фаз (которое может быть в интервале 0-2π), вычисленным исходя из предыдущего обнаруженного расстояния.
Разность между ожидаемой фазой и фактической, обнаруженной фазой соответствует сдвигу расстояния. В принципе, данных одного такого сдвига, полученных от одной частоты, достаточно, чтобы обеспечить уточнение обнаруженного расстояния. Однако при таком обнаружении неопределенность обычно будет слишком существенной, чтобы обеспечить удовлетворительную надежность, и обычно потребуется некоторый статистический анализ.
На шаге S7 процессор 11 сравнивает полученные данные измерения расстояния с предыдущими полученными данными измерения расстояния. В ситуации, когда в ходе этих измерений расстояние не изменилось, констатируют, что поверхность стабильна и неподвижна. Критерии для такой констатации могут, естественно, быть разными в зависимости от задачи, но, например, может быть произведено сравнение друг с другом данных 10 измерений расстояния, полученных за период, составляющий, например, 1 минуту. Если все значения замеров оказываются равными в пределах заданного допуска, то можно констатировать, что уровень стабилен. Когда сделана такая констатация, процессор 11 и приемопередатчик 10 переходят во второй режим работы, о чем будет сказано ниже. В противном случае процедура возвращается к шагу S1 для нового цикла. Следует отметить, что частотную схему можно обновлять между циклами в зависимости от результата измерений.
Далее, согласно фиг. 5, будет рассмотрен второй режим работы.
Во-первых, на шаге S11 схема ФАПЧ 20 формирует импульс установленной длительности, например 2 мс, и передает в качестве сигналов ST в резервуар посредством антенны 3.
На шаге S12 переданные электромагнитные сигналы ST отражаются в резервуаре 5 на границах раздела сред (перехода импеданса), включая поверхность 7 продукта 6, содержащегося в резервуаре, и возвращаются к приемопередатчику 10 в виде эхо-сигналов от антенны 3. Отраженные сигналы SR принимаются (на шаге S3) двумя каналами (I и Q) приемной секции приемопередатчика 10.
Затем на шаге S13 процессором 11 по выходным сигналам двух каналов посредством стандартной I/Q обработки производится определение разности фаз переданного импульса и отраженного импульса. Сдвиг фазы записывается в память 13 (шаг S14), и на шаге S15 производится сравнение обнаруженного фазового сдвига с предыдущим записанным в память фазовым сдвигом для импульса такой же частоты из предшествующего цикла модуляции. К примеру, временное расстояние между импульсами, имеющими одинаковые несущие частоты может составлять по меньшей мере пять или по меньшей мере десять секунд. Изменение фазового сдвига, связанное с такими импульсами, сравнивают с пороговым значением (ТН), выбираемым исходя из конкретной реализации системы.
Если изменение фазового сдвига превышает пороговое значение, это указывает на то, что поверхность сместилась со времени предыдущего сигнала с качанием частоты, при этом процессор 11 и приемопередатчик 10 переходят к ранее рассмотренному первому режиму работы, чтобы отслеживать уровень поверхности. Если изменение фазы меньше порогового значения, то констатируют, что уровень по-прежнему остается постоянным (поверхность не движется), и алгоритм возвращается к шагу S11. Шаги S11-S15 повторяются непрерывно для выбранного числа частот. Это число частот обычно меньше того числа, которое требуется для выполнения полного измерения, и в крайнем случае это число может быть равным единице (в этом случае передаваемый сигнал представляет собой просто цепочку идентичных импульсов). Однако, во втором рабочем режиме может быть предпочтительным использовать по меньшей мере две частоты, или даже больше частот. Это может сделать процесс менее чувствительным к возмущениям и более надежным. Тогда импульсы можно передавать группами, причем каждая группа импульсов включает в себя набор частот, а следующие друг за другом сигналы с качанием частоты имеют по меньшей мере одну общую частоту, что обеспечивает возможность сравнения.
Также следует отметить, что частоты, включаемые в каждую группу, могут быть разными. В соответствии с одним вариантом осуществления изобретения, каждая группа включает в себя ряд частот, например две частоты, причем по меньшей мере одна из этих частот заменена в каждой другой группе. Так, например, первая группа может содержать частоты А и В, вторая группа - частоты В и С, третья группа - частоты С и D, а четвертая группа - частоты D и А. Таким образом, сравнение импульсов одинаковой частоты можно производить в каждой группе, но всегда для различных частот.
Констатацию факта, что поверхность перемещается, предпочтительно, можно производить на основании повторных сравнений, чтобы избежать случайных возмущений, таких как падение капель с антенны, что приводит к выполнению ненужных операций определения уровня. К примеру, может быть полезным сравнивать более двух следующих друг за другом сдвигов фазы для импульсов с одинаковыми частотами. Если фазовый сдвиг сначала изменяется, а затем возвращается к предыдущему значению, тогда можно предположить наличие возмущения. С другой стороны, если два или более сравнений подтверждают изменение фазового сдвига, тогда, вероятно, имеет место фактическое смещение поверхности. Специалист в данной области может предвидеть различные другие методы статистического анализа.
Для специалистов в данной области должно быть понятно, что настоящее изобретение никоим образом не ограничено рассмотренными выше предпочтительными вариантами осуществления. Напротив, в рамках объема изобретения, установленных прилагаемой формулой изобретения, возможны многие модификации и варианты осуществления изобретения. К примеру, принципы настоящего изобретения не требуют I/Q обработки, а фактически применимы к одноканальной системе. Кроме того, в подробности схемы приемопередатчика можно внести изменения целым рядом способов, не выходя при этом за рамки идеи изобретения. К тому же измеритель, вдобавок к первому и второму режимам работы, может действовать и в дополнительных режимах.
Изобретение относится к радарным уровнемерам. Заявлен способ радарного определения уровня и система для его реализации. Данный способ включает передачу, по меньшей мере, двух разделенных во времени импульсов несущей волны, имеющих одинаковые несущие частоты, определение изменения фазового сдвига, связанного с двумя импульсами в передаваемых сигналах, имеющих одинаковые частоты, сравнение данного изменения с пороговой величиной и, в зависимости от результата сравнения, определение расстояния на основании соотношения между передаваемыми сигналами и отраженными сигналами. Техническим результатом является обеспечение системы для радарного измерения уровня, использующей импульсы постоянной частоты, которые являются длительными по сравнению с временем прохождения. 2 н. и 17 з.п. ф-лы, 5 ил.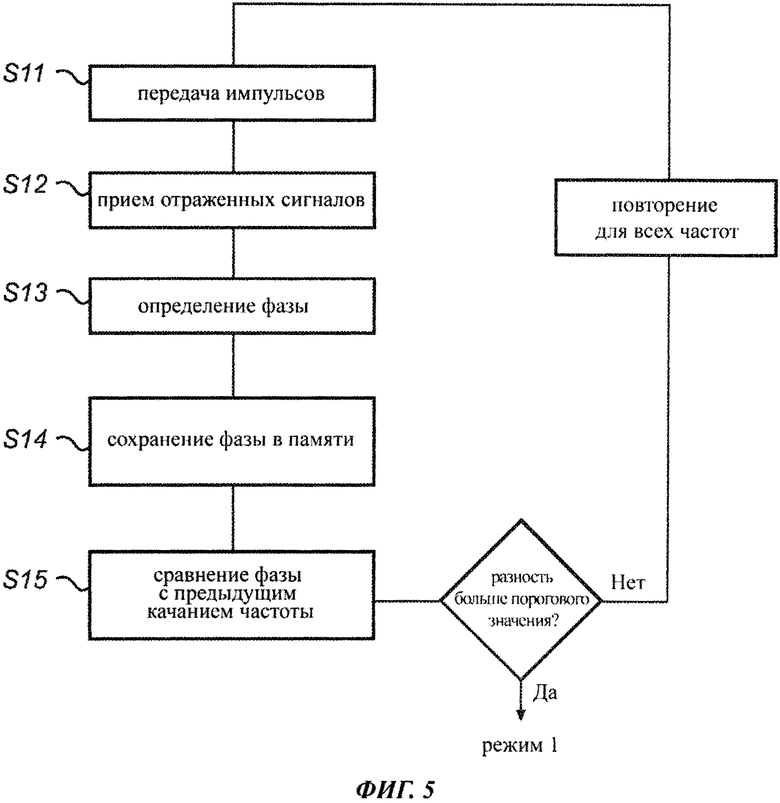
1. Способ определения расстояния до поверхности продукта, находящегося в резервуаре, содержащий шаги, на которых:
передают (шаг S11) передаваемые электромагнитные сигналы в направлении указанной поверхности,
принимают (шаг S12) ответные электромагнитные сигналы, отраженные от указанной поверхности,
указанные передаваемые сигналы содержат, по меньшей мере, два разделенных во времени отдельных импульса на несущей волне, имеющих одинаковые несущие частоты, при этом каждый импульс имеет длительность, которая больше 1 микросекунды, но меньше 100 миллисекунд,
определяют (шаг S13) фактические фазовые параметры каждого импульса в передаваемых сигналах по отношению к каждому соответствующему импульсу в ответных сигналах, причем указанные фазовые параметры включают в себя фазовый сдвиг,
определяют (шаг S15) изменение фазового сдвига, связанное с двумя импульсами в передаваемых сигналах, имеющих одинаковые частоты, сравнивают указанное изменение с пороговым значением, и
в зависимости от результата шага сравнения определяют (шаг S6) указанное расстояние на основании соотношения между указанными передаваемыми сигналами и ответными сигналами.
2. Способ по п. 1, причем указанный способ включает в себя работу в первом рабочем режиме и во втором рабочем режиме, при этом указанное расстояние определяют (шаг S6) в указанном первом рабочем режиме, а указанное изменение фазового сдвига определяют (шаг S15) в указанном втором рабочем режиме, причем первый рабочий режим выбирают в зависимости от результата указанного шага сравнения.
3. Способ по п. 2, в котором средняя передаваемая мощность в указанном втором рабочем режиме ниже, чем в указанном первом рабочем режиме.
4. Способ по п. 2, причем указанный способ включает в себя следующие шаги:
передают в указанном втором рабочем режиме ряд разделенных во времени групп импульсов, каждая из которых содержит, по меньшей мере, два импульса с различной частотой, при этом, по меньшей мере, один импульс из каждой группы импульсов имеет такую же частоту, как частота одного импульса из предыдущей группы импульсов, и
определяют ряд изменений фазового сдвига, относящихся к разным парам импульсов, имеющим одинаковые частоты.
5. Способ по п. 4, в котором, по меньшей мере, один импульс из каждой группы импульсов имеет частоту, которая не входит в предыдущую группу импульсов.
6. Способ по п. 2, причем указанный способ включает в себя следующие шаги:
передают в указанном первом рабочем режиме серию отдельных импульсов на несущей волне, причем указанная серия импульсов имеет средний коэффициент заполнения менее 50%, а каждый импульс имеет длительность более 1 микросекунды, но менее 100 миллисекунд, и определенную центральную частоту, выбранную в соответствии с частотной схемой в заданном интервале частот, при этом заданный интервал частот составляет более 5% от средней центральной частоты, и определяют указанное расстояние, выполняя следующие действия:
на основании начальной оценки расстояния вычисляют ожидаемые фазовые параметры каждого принимаемого отдельного импульса по отношению к каждому соответствующему передаваемому отдельному импульсу, и
соотносят указанные фактические фазовые параметры с указанными ожидаемыми фазовыми параметрами, чтобы обеспечить уточненную оценку указанного расстояния.
7. Способ по п. 2, причем указанный способ в первом рабочем режиме включает в себя следующее:
передают серию коротких импульсов, и
определяют указанное расстояние на основании времени прохождения каждого импульса.
8. Способ по п. 2, причем указанный способ в первом рабочем режиме включает в себя следующее:
передают сигнал с качанием частоты в определенном интервале частот; и определяют указанное расстояние на основании соотношения между переданным сигналом с качанием частоты и отраженным сигналом с качанием частоты.
9. Способ по п. 1, в котором указанные импульсы, имеющие равные частоты, разделены во времени, по меньшей мере, на 5 секунд.
10. Способ по п. 1, дополнительно включающий в себя определение ряда изменений фазового сдвига перед определением указанного расстояния.
11. Способ по п. 1, в котором каждой частотой несущей волны управляют в контуре с обратной связью, обеспечивая погрешность по частоте менее 1/1000.
12. Система измерения уровня для определения расстояния до поверхности продукта в резервуаре, содержащая:
приемопередатчик (10) для передачи передаваемых электромагнитных сигналов и приема ответных электромагнитных сигналов, отраженных от указанной поверхности, причем указанный приемопередатчик выполнен с возможностью передачи сигналов, содержащих, по меньшей мере, два разделенных во времени импульса несущей волны, имеющих одинаковые частоты, при этом каждый импульс имеет длительность более 1 микросекунды, но менее 100 миллисекунд,
схему (11) обработки, предназначенную для:
определения фактических фазовых параметров каждого импульса в передаваемых сигналах по отношению к каждому соответствующему импульсу в ответных сигналах, причем указанные фазовые параметры включают в себя фазовый сдвиг,
определения изменения фазового сдвига, связанного с двумя импульсами в передаваемых сигналах, имеющими одинаковые частоты,
сравнения указанного изменения с пороговым значением, и
определения, в зависимости от результата сравнения, указанного расстояния на основании соотношения между указанными передаваемыми сигналами и указанными ответными сигналами.
13. Система по п. 12, в которой указанный приемопередатчик (10) и указанная схема (11) обработки выполнены с возможностью работы в первом рабочем режиме и втором рабочем режиме, причем определение указанного расстояния происходит в первом рабочем режиме, а определение указанного изменения фазового сдвига - во втором рабочем режиме,
при этом указанная схема обработки предназначена для выбора указанного первого рабочего режима в зависимости от результата указанного шага сравнения.
14. Система по п. 12, в которой указанный приемопередатчик (10) выполнен с возможностью передачи более низкой средней передаваемой мощности в указанном втором рабочем режиме, чем в указанном первом рабочем режиме.
15. Система по п. 13, в которой указанный приемопередатчик (10) в указанном первом рабочем режиме выполнен с возможностью передачи серии отдельных импульсов на несущей волне, причем указанная серия импульсов имеет средний коэффициент заполнения менее 50 процентов, а каждый импульс имеет длительность более 1 микросекунды, но менее 100 миллисекунд, и определенную центральную частоту, выбранную в соответствии с частотной схемой в заданном интервале частот, при этом указанный заданный интервал частот составляет более 5% от средней центральной частоты, и
при этом указанная схема (11) обработки в указанном первом рабочем режиме выполнена с возможностью определения указанного расстояния путем выполнения:
вычисления, на основании начальной оценки расстояния, ожидаемых фазовых параметров каждого принимаемого отдельного импульса по отношению к каждому соответствующему передаваемому отдельному импульсу, и
соотнесения указанных фактических фазовых параметров с указанными ожидаемыми фазовыми параметрами для обеспечения уточненной оценки указанного расстояния.
16. Система по п. 13, в которой указанный приемопередатчик (10) в указанном первом рабочем режиме выполнен с возможностью передавать серии коротких импульсов, а указанная схема обработки выполнена с возможностью определять указанное расстояние на основании времени прохождения каждого импульса.
17. Система по п. 13, в которой указанный приемопередатчик (10) в указанном первом рабочем режиме выполнен с возможностью передавать сигнал с качанием частоты в некотором интервале частот, а указанная схема обработки выполнена с возможностью определять указанное расстояние на основании соотношения между передаваемым сигналом с качанием частоты и отраженным сигналом с качанием частоты.
18. Система по п. 12, дополнительно содержащая контур (20) управления с обратной связью для управления каждой частотой несущей волны, чтобы обеспечивать погрешность частоты менее 1/1000.
19. Система по п. 12, в которой импульсы, имеющие одинаковые частоты, разделены во времени, по меньшей мере, на 5 секунд.
| US 6415660 B1, 09.07.2002 | |||
| WO 2008057022 A1, 15.05.2008 | |||
| СТАНОК ДЛЯ МАССОВОГО ИЗГОТОВЛЕНИЯ ИЗ ДЕРЕВА ИЗДЕЛИЙ В ФОРМЕ ТЕЛА ВРАЩЕНИЯ | 1925 |
|
SU6324A1 |
| US 6680690 B1, 20.01.2004 | |||
| ВРЕМЯИМПУЛЬСНЫЙ УРОВНЕМЕР | 1992 |
|
RU2023989C1 |

