Изобретение относится к строительству дренажа, трубопроводов и касается систем автоматизации дренажных и других машин.
Аналогами предполагаемого изобретения являются известные способы и устройства автоматического управления высотным положением рабочего органа дреноукладчика и контроля глубины укладываемой дрены.
Традиционный метод контроля точности строительства дренажа траншейным дреноукладчиком предусматривает нивелировку дрены или коллектора в процессе или после их укладки (до засыпки грунтом) с применением оптического нивелира и геодезической рейки, устанавливаемой на дренажную трубу.
Вертикальные отметки дрены на дреноукладчике могут также контролироваться оператором в процессе ее укладки при помощи оптического нивелира и геодезической рейки, закрепленной в трубоукладчике на параллелограммной навеске с опорным роликом, катящимся по дренажной трубе. Отсчеты по рейке оператор снимает в моменты загорания сигнальной лампочки, включаемой по команде датчика пути [1].
По полученным данным нивелировки рассчитывают на компьютере с программным обеспечением показатели точности укладки дрен и коллекторов, которые сравнивают с предъявляемыми требованиями к точности укладки дренажа [2]. Обнаруженные недопустимые отклонения подлежат устранению. По результатам контроля составляют акт на скрытые работы. В случае обнаружения значительных нарушений предъявляемых требований необходимо проводить повторную укладку дрены.
В отличие от оптической нивелировки применение лазерной системы управления позволяет одновременно в процессе работы проводить текущий контроль укладки дренажа вручную при помощи рейки с фотоиндикатором. Рейку устанавливают в процессе работы на уложенную дренажную трубу, а вертикальные отметки фиксируют визуально по рейке, где установлен фотоиндикатор, регистрирующий лазерный луч. Этот метод ранее использовался на траншейных дреноукладчиках с лазерной системой типа УКЛ [3].
Однако этот способ контроля не автоматизирован, т.к. существующие лазерные системы выполняют только функцию автоматического управления высотным положением рабочего органа дреноукладчика и не имеют функцию автоматического контроля точности в процессе укладки дрены, что требует применения в бригаде дреноукладчика дополнительно двух рабочих для нивелировки.
Применение спутниковой навигационной системы позволяет регистрировать вертикальные отметки приемника в процессе работы и выводить на экран пульта управления изображение близкого профиля дрены. Это дает возможность примерно оценить точность укладки дрены в сравнении с проектными данными. Точность контроля укладки дрены зависит от марки навигационной системы, погодных и других условий и составляет ± 2-5 см, что хуже лазерной системы. Стоимость навигационной системы высока и в 10 раз превышает стоимость лазерной системы.
Лазерные системы автоматического управления высотным положением рабочего органа дреноукладчика состоят из лазерного передатчика ЛП, приемника ПР, пульта управления ПУ, электрогидроблока ЭГ, исполнительного гидроцилиндра ИЦ и рабочего органа РО, на котором установлен приемник. При отклонении рабочего органа от проектной глубины укладки дрены приемник также смещается относительно лазерного луча и, преодолев зону нечувствительности, вырабатывает электрический сигнал, который по цепи управления ЛП-ПР-ПУ-ЭБ-ИО-РО-ПР возвращает приемник на лазерный луч и рабочий орган на проектную глубину укладки дрены [3, 4, 5].
Целью настоящего изобретения является устранение отмеченных недостатков путем автоматизации процесса лазерного контроля точности укладки дрены при одновременном автоматическом управлении высотным положением рабочего органа дреноукладчика, что позволит высвободить двух рабочих, сократить трудозатраты, выявить места появления нулевых и отрицательных местных уклонов укладываемой дренажной трубы и исправить недопустимые отклонения в процессе или после укладки дрены, а также хранить полученную информацию и передавать ее на компьютер для составления паспорта дрены.
Указанная цель достигается тем, что система лазерного автоматического управления и контроля глубины укладки дрены, состоящая из лазерного передатчика, формирующего лазерный луч параллельно заданному продольному уклону дрены, приемника, выполненного в виде вертикально расположенных фотодиодов и закрепленного на рабочем органе дреноукладчика, пульта управления, электрогидроблока, исполнительного органа в виде гидроцилиндров и датчика пути, отличающаяся тем, что выходы фотодиодов приемника подключены к входам контроллера, который выдает цифровой сигнал о высоте центра приемника относительно лазерного луча, идентичный высотному отклонению дрены, при этом выходы контроллера и датчика пути подключены к входам пульта управления, который дополнительно снабжен вычислительным устройством для определения местного уклона дрены относительно горизонта в зависимости от отклонений центра приемника на шаге пути и звуковым устройством для регистрации нулевых и отрицательных местных уклонов дрены, а также режимами ввода проектного уклона дрены, шага пути, зоны нечувствительности приемника и функциями автоматического управления высотным положением рабочего органа дреноукладчика, калибровки датчика пути, сохранения, просмотра и вывода записанной информации на периферийное устройство в виде компьютера с программным обеспечением для составления паспорта дрены.
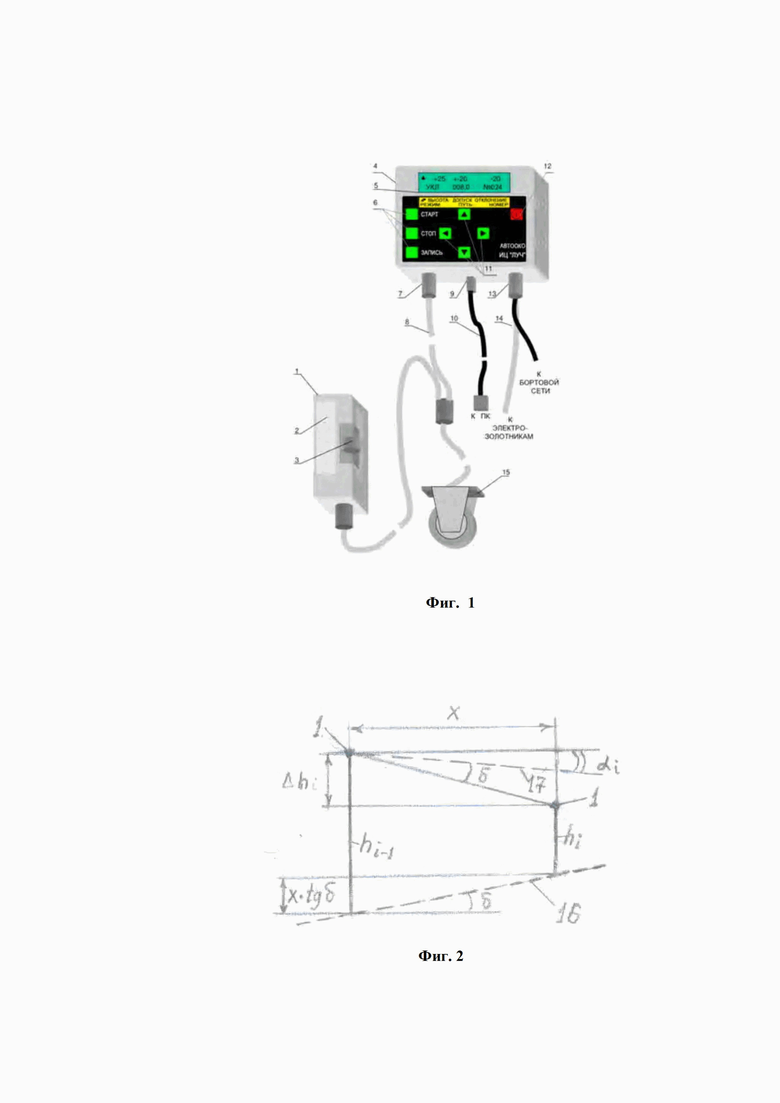
На фиг. 1 представлен состав лазерной системы автоматического управления и контроля глубины укладки дрен, где:
1 - приемник,
2 - окно,
3 - хомут крепления,
4 - пульт управления,
5 - жидко-кристаллический индикатор,
6 и 11 - сенсорные кнопки управления,
7, 9, 13 - разъемы,
12 - кнопка включения и выключения,
8, 10, 14 - соединительные кабели,
15 - датчик пути.
На фиг. 2 изображена схема определения местных уклонов дрены, где:
1 - положение центра приемника относительно лазерного луча, 16 - лазерный луч, 17 - участок дрены с местным уклоном αi относительно горизонта, hi-1, hi - вертикальные отклонения центра приемника от лазерного луча, равные местным отклонениям дрены, x - шаг отметок, δ - проектный уклон дрены относительно горизонта, задаваемый лазерным передатчиком, ∆hi - шаговое изменение высоты дрены от лазерного луча, равное ∆hi = hi-1 - hi, x ⋅ tg δ - превышение отметок лазерного луча на шаге пути.
В начале укладки дрены рабочий орган дреноукладчика заглубляют на проектную глубину и при помощи узла подвески устанавливают центр приемника на лазерной плоскости, когда показание на индикаторе пульта управления будет равно нулю. В память пульта управления вводят выбранную зону нечувствительности, уклон дрены и шаг измеряемых отметок.
В процессе работы глубина укладки дрены регулируется автоматически по цепи управления ЛП-ПР-ПУ-ЭГ-ИО-РО-ПР. Контроллер после прохождения очередного шага пути регистрирует высотные отклонения центра приемника относительно лазерного луча, идентичные отклонениям дрены, а вычислительное устройство пульта управления определяет местные уклоны дрены относительно горизонта по формуле (Фиг. 2):
tg αi = (hi - hi-1)/ х + tg δ (1),
где tg αi - тангенс местного уклона дрены,
hi-1, hi - вертикальные отклонения центра приемника от лазерного луча, равные местным отклонениям дрены, мм,
x - шаг отметок, мм,
tg δ - тангенс проектного уклона дрены, задаваемый лазерным передатчиком.
При появлении отрицательного или нулевого местного уклона дрены звуковое устройство издает звуковой сигнал. В случае появления двух звуковых сигналов, регистрирующих недопустимые местные уклоны дрены (по предъявляемым требованиям), следует остановить дреноукладчик и устранить, если это возможно, обнаруженные нарушения или это сделать после укладки дрены, пользуясь записанными показаниями датчика пути.
Автоматический лазерный контроль точности укладки дрен позволяет исключить из состава обслуживающего персонала двух человек (геодезиста и реечника), которые осуществляют контроль точности укладки дрен при помощи нивелира и геодезической рейки, что исключает применение ручного труда. Кроме того, контроль точности укладки дрены дает возможность выявить места появления нулевых и отрицательных местных уклонов укладываемой дрены.
После завершения строительства дренажа пульт управления с хранящейся информацией подключают к персональному компьютеру с установленным программным обеспечением для последующего составления и хранения паспортов дрен и коллекторов.
Источники информации
1. Временные рекомендации по проектированию и строительству закрытого дренажа из пластмассовых труб с применением бестраншейного дреноукладчика МД-4 с тягачом МД-5. Минводхоз СССР, Главнечерноземводстрой, Ленгипроводхоз, Ленинград, 1978, 65 с.
2. Ефремов А.Н., Маммаев З.М., Панов Е.П., Черненок В.Я. Рекомендации по контролю и оценке качества строительства дренажа в зоне осушения. М.: ВНИИГиМ, 1979, 28 с.
3. Ефремов А.Н., Камальдинов А.К., Мармалев А.И., Самородов В.Г. «Лазерная техника в мелиоративном строительстве». М.: Агропромиздат, 1989. - С.223.
4. Ефремов А.Н. Системы управления дреноукладчиков. М: ООО «Литера-Принт», 2019, 52 с.
5. Патент на изобретение № 2650007 «Система автоматического управления высотным положением рабочего органа дреноукладчика», Бюл. № 10 от 06.04.2018.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| Дреноукладчик | 2023 |
|
RU2810925C1 |
| СПОСОБ ПЛАНИРОВКИ ЗЕМЕЛЬ | 2017 |
|
RU2689467C1 |
| Датчик пути | 1990 |
|
SU1788164A1 |
| Устройство управления рабочим органом дреноукладчика | 1983 |
|
SU1151647A1 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| Полуприцепной дреноукладчик и система регулирования пространственного положения его рабочего органа | 1990 |
|
SU1789614A1 |
| Устройство автоматического управления бестраншейного дреноукладчика | 1980 |
|
SU907177A1 |
| СПОСОБ И УСТРОЙСТВО ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2008 |
|
RU2399197C2 |
| Способ создания маркерных линий для управления дреноукладчиком | 1991 |
|
SU1779218A3 |
Заявлена система лазерного автоматического управления и контроля глубины укладки дрены. Техническим результатом является автоматизация процесса лазерного контроля точности укладки дрены при одновременном автоматическом управлении высотным положением рабочего органа дреноукладчика. В системе лазерного автоматического управления выходы фотодиодов приемника подключены к входам контроллера, который выдает цифровой сигнал о высоте центра приемника относительно лазерного луча, идентичный высотному отклонению дрены. Выходы контроллера и датчика пути подключены к входам пульта управления, который дополнительно снабжен вычислительным устройством для определения местного уклона дрены относительно горизонта в зависимости от отклонений центра приемника на шаге пути и звуковым устройством для регистрации нулевых и отрицательных местных уклонов дрены. Также система обладает режимами ввода проектного уклона дрены, шага пути, зоны нечувствительности приемника и функциями автоматического управления высотным положением рабочего органа дреноукладчика, калибровки датчика пути, сохранения, просмотра и вывода записанной информации на периферийное устройство в виде компьютера с программным обеспечением для составления паспорта дрены. 2 ил.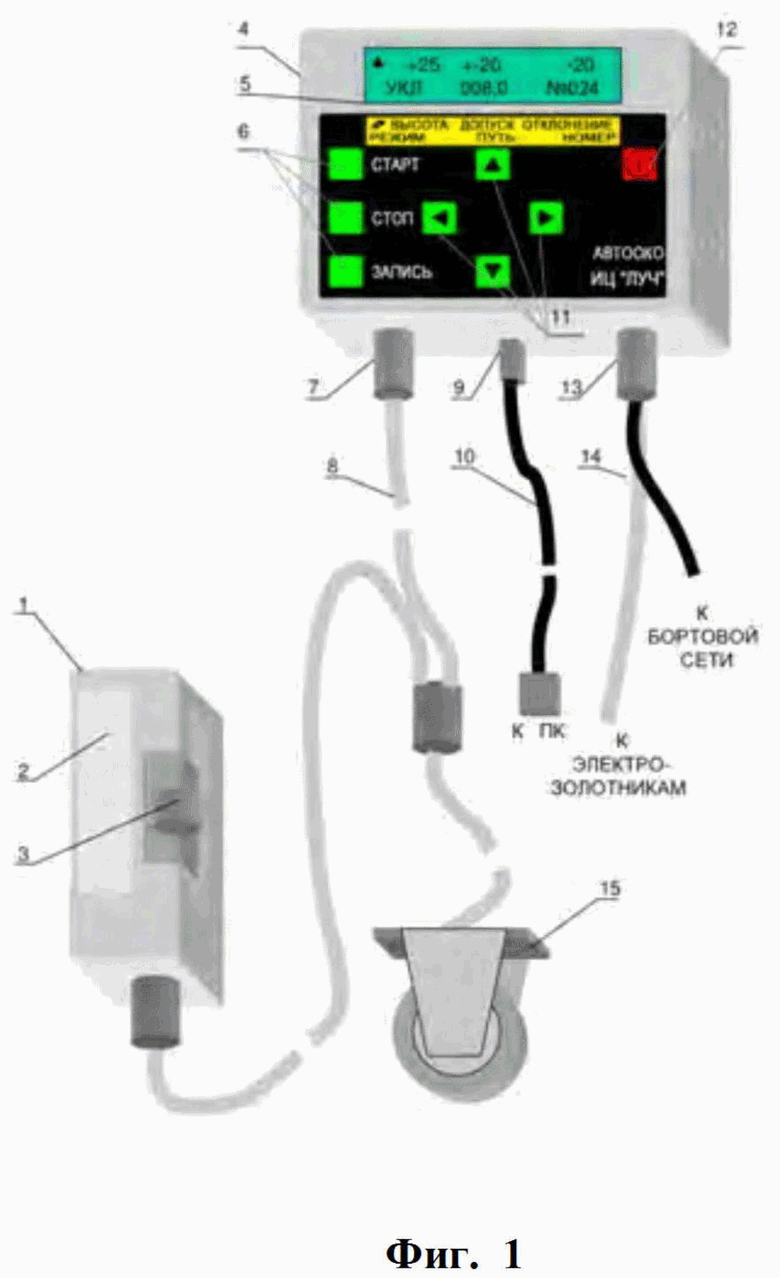
Система лазерного автоматического управления и контроля глубины укладки дрен, состоящая из лазерного передатчика, формирующего лазерный луч параллельно заданному продольному уклону дрены, приемника, выполненного в виде вертикально расположенных фотодиодов и закрепленного на рабочем органе дреноукладчика, пульта управления, электрогидроблока, исполнительного органа в виде гидроцилиндров и датчика пути, отличающаяся тем, что выходы фотодиодов приемника подключены к входам контроллера, который выдает цифровой сигнал о высоте центра приемника относительно лазерного луча, идентичный высотному отклонению дрены, при этом выходы контроллера и датчика пути подключены к входам пульта управления, который дополнительно снабжен вычислительным устройством для определения местного уклона дрены относительно горизонта в зависимости от отклонений центра приемника на шаге пути и звуковым устройством для регистрации нулевых и отрицательных местных уклонов дрены, а также режимами ввода проектного уклона дрены, шага пути, зоны нечувствительности приемника и функциями автоматического управления высотным положением рабочего органа дреноукладчика, калибровки датчика пути, сохранения, просмотра и вывода записанной информации на периферийное устройство в виде компьютера с программным обеспечением для составления паспорта дрены.
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| Устройство для контроля прямолинейности укладываемого дренопровода | 1979 |
|
SU878868A1 |
| SU 11779218 A3, 30.11.1992 | |||
| US 4884939 A1, 05.12.1992 | |||
| WO 2016032685 A1, 03.03.2016 | |||
| ЕФРЕМОВ А.Н | |||
| "Лазерная планировка орошаемых земель" | |||
| М.: ООО "Литера-Принт", 2016, всего 52 с., с.22-36. | |||

