Уровень техники
[1] Транспортные средства типично затягивают окружающий воздух в отсек двигателя для различных систем транспортного средства, например, охлаждения, выхлопа и т.д. Объем привносимого воздуха может управляться посредством открытия и закрытия активной шторки решетки радиатора. Открытие активной шторки решетки радиатора может быть важным для охлаждения компонентов транспортного средства, но может не быть необходимым в некоторых условиях. Закрытие активной шторки решетки радиатора предоставляет возможность воздуху проходить поверх шторки, и аэродинамическое сопротивление транспортного средства может быть уменьшено. Не хватает систем для обнаружения того, является ли активная шторка решетки радиатора открытой или закрытой.
Сущность изобретения
Предлагается система, содержащая компьютер, запрограммированный, чтобы: из первого транспортного средства инструктировать второму транспортному средству перемещать шторку решетки радиатора в указанную позицию; захватывать изображение шторки решетки радиатора; определять, находится ли шторка решетки радиатора в указанной позиции, по меньшей мере, частично на основе изображения; и сообщать второму транспортному средству указание неисправности, когда шторка решетки радиатора не находится в указанной позиции. Причем указанная позиция является открытой позицией. Причем компьютер дополнительно программируется, чтобы определять температуру шторки решетки радиатора, по меньшей мере, частично на основе изображения и сообщать второму транспортному средству указание неисправности, когда температура шторки решетки радиатора находится в пределах предварительно определенного порогового значения температуры окружающего воздуха. Причем компьютер дополнительно программируется, чтобы инструктировать второму транспортному средству определять, присутствуют ли пассажиры во втором транспортном средстве, и приводить в действие подсистему управления климатом, когда пассажиры не присутствуют во втором транспортном средстве. Причем в которой указанная позиция является закрытой позицией. Причем компьютер дополнительно программируется, чтобы определять температуру шторки решетки радиатора, по меньшей мере, частично на основе изображения и сообщать второму транспортному средству указание неисправности, когда температура шторки решетки радиатора выше предварительно определенного порогового значения температуры окружающего воздуха. Причем компьютер дополнительно программируется, чтобы принимать запрос от второго транспортного средства, чтобы захватывать изображение шторки решетки радиатора и приводить в действие одну или более подсистем транспортного средства в первом транспортном средстве, чтобы перемещать первое транспортное средство впереди второго транспортного средства. Причем компьютер дополнительно программируется, чтобы сравнивать изображение шторки решетки радиатора с сохраненным изображением другой шторки решетки радиатора в указанной позиции и определять, находится ли шторка решетки радиатора в указанной позиции. Причем компьютер дополнительно программируется, чтобы захватывать изображение с помощью камеры заднего вида. Причем компьютер дополнительно программируется, чтобы инструктировать датчику шторки решетки радиатора второго транспортного средства определять, находится ли шторка решетки радиатора в указанной позиции, и сообщать второму транспортному средству указание неисправности в датчике шторки решетки радиатора, когда определение посредством датчика шторки решетки радиатора отличается от определения на основе изображения.
Также предлагается способ, содержащий этапы, на которых: из первого транспортного средства инструктируют второму транспортному средству перемещать шторку решетки радиатора в указанную позицию; захватывают изображение шторки решетки радиатора; определяют, находится ли шторка решетки радиатора в указанной позиции, по меньшей мере, частично на основе изображения; и сообщают второму транспортному средству указание неисправности, когда шторка решетки радиатора не находится в указанной позиции. Причем указанная позиция является открытой позицией. Причем способ дополнительно содержит этапы, на которых определяют температуру шторки решетки радиатора, по меньшей мере, частично на основе изображения и сообщают второму транспортному средству указание неисправности, когда температура шторки решетки радиатора находится в пределах предварительно определенного порогового значения температуры окружающего воздуха. Причем способ дополнительно содержит этапы, на которых инструктируют второму транспортному средству определять, присутствуют ли пассажиры во втором транспортном средстве, и приводят в действие подсистему управления климатом, когда пассажиры не присутствуют во втором транспортном средстве. Причем, указанная позиция является закрытой позицией. Причем способ дополнительно содержит этапы, на которых определяют температуру шторки решетки радиатора, по меньшей мере, частично на основе изображения и сообщают второму транспортному средству указание неисправности, когда температура шторки решетки радиатора выше предварительно определенного порогового значения температуры окружающего воздуха. Причем способ дополнительно содержит этапы, на которых принимают запрос от второго транспортного средства, чтобы захватывать изображение шторки решетки радиатора, и приводят в действие одну или более подсистем транспортного средства первого транспортного средства, чтобы перемещать первое транспортное средство впереди второго транспортного средства. Причем способ дополнительно содержит этапы, на которых сравнивают изображение шторки решетки радиатора с сохраненным изображением другой шторки решетки радиатора в указанной позиции и определяют, находится ли шторка решетки радиатора в указанной позиции. Причем способ дополнительно содержит этапы, на которых инструктируют датчику шторки решетки радиатора определять, находится ли шторка решетки радиатора в указанной позиции, и сообщают второму транспортному средству указание неисправности в датчике шторки решетки радиатора, когда определение посредством датчика шторки решетки радиатора отличается от определения на основе изображения.
Также предлагается система, содержащая компьютер, имеющий процессор и память, память хранит инструкции, исполняемые процессором, чтобы: принимать инструкции от первого транспортного средства, чтобы перемещать активную шторку решетки радиатора второго транспортного средства в указанную позицию; перемещать активную шторку решетки радиатора в указанную позицию; и принимать сообщение, указывающее, является ли активная шторка решетки радиатора неисправной; идентифицировать место ремонта; и приводить в действие одну или более подсистем транспортного средства, чтобы перемещать второе транспортное средство к месту ремонта.
Краткое описание чертежей
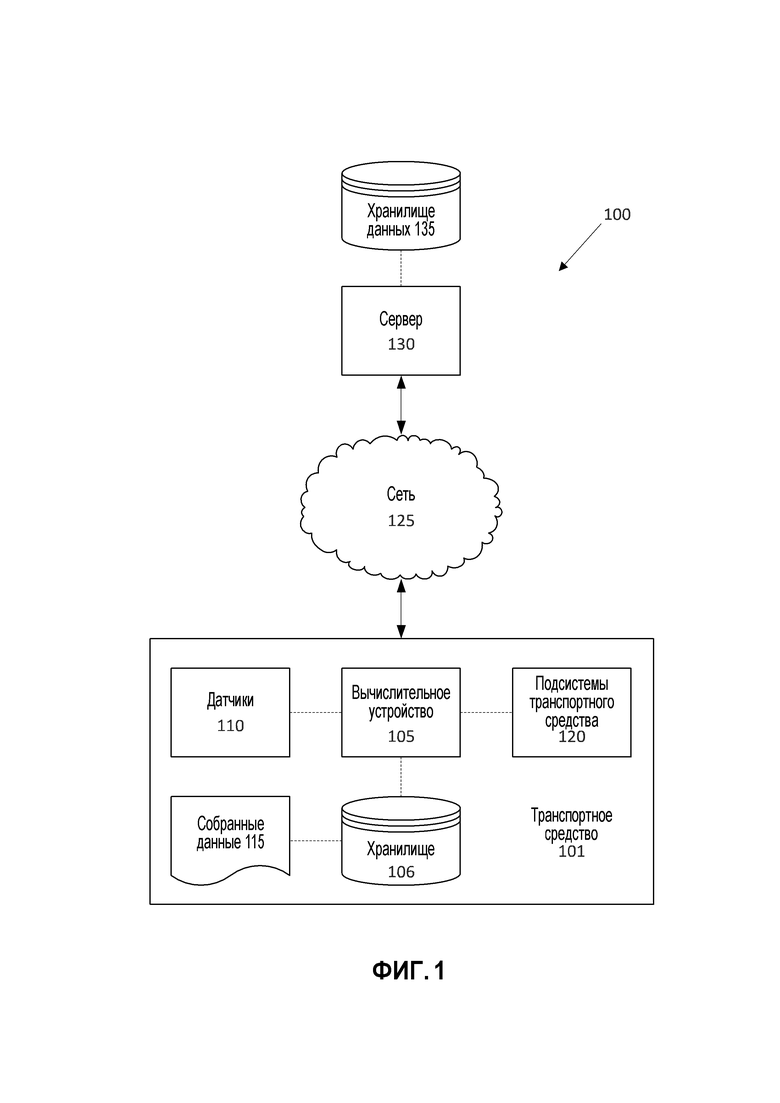
[2] Фиг. 1 - это блок-схема примерной системы для управления активной шторкой решетки радиатора.
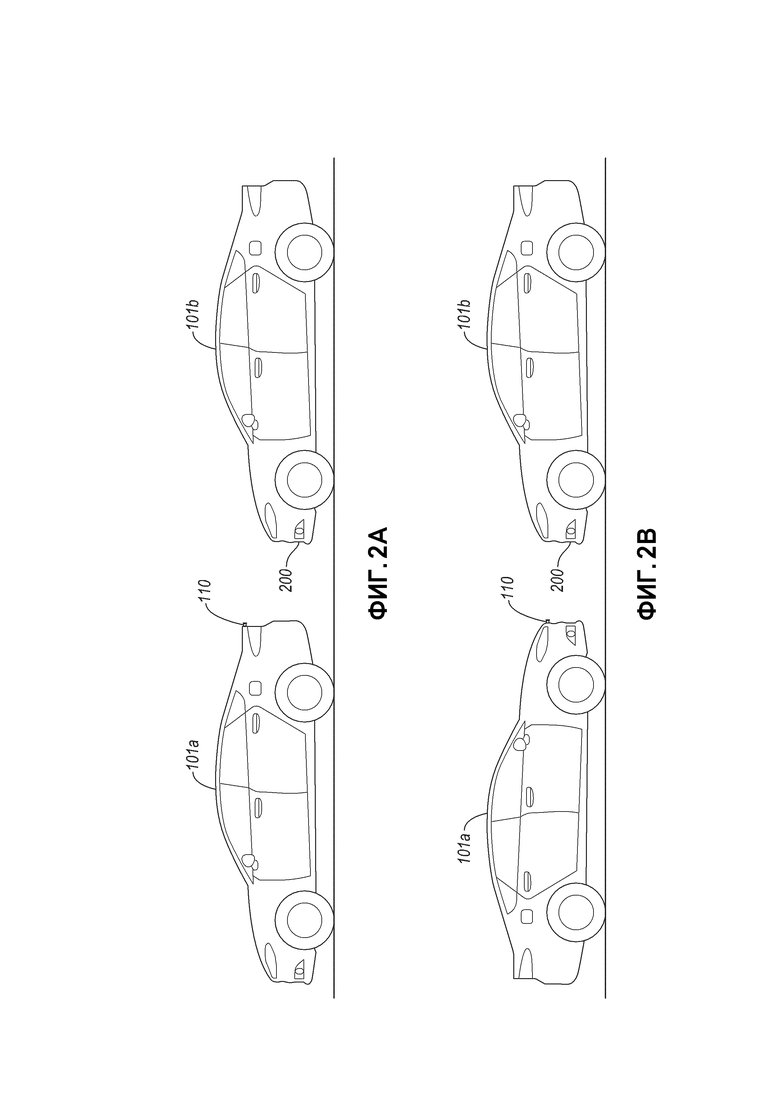
[3] Фиг. 2A - это вид первого транспортного средства, захватывающий изображение активной шторки решетки радиатора второго транспортного средства с помощью камеры заднего вида.
[4] Фиг. 2B - это вид первого транспортного средства, захватывающий изображение активной шторки решетки радиатора второго транспортного средства с помощью фронтальной камеры.
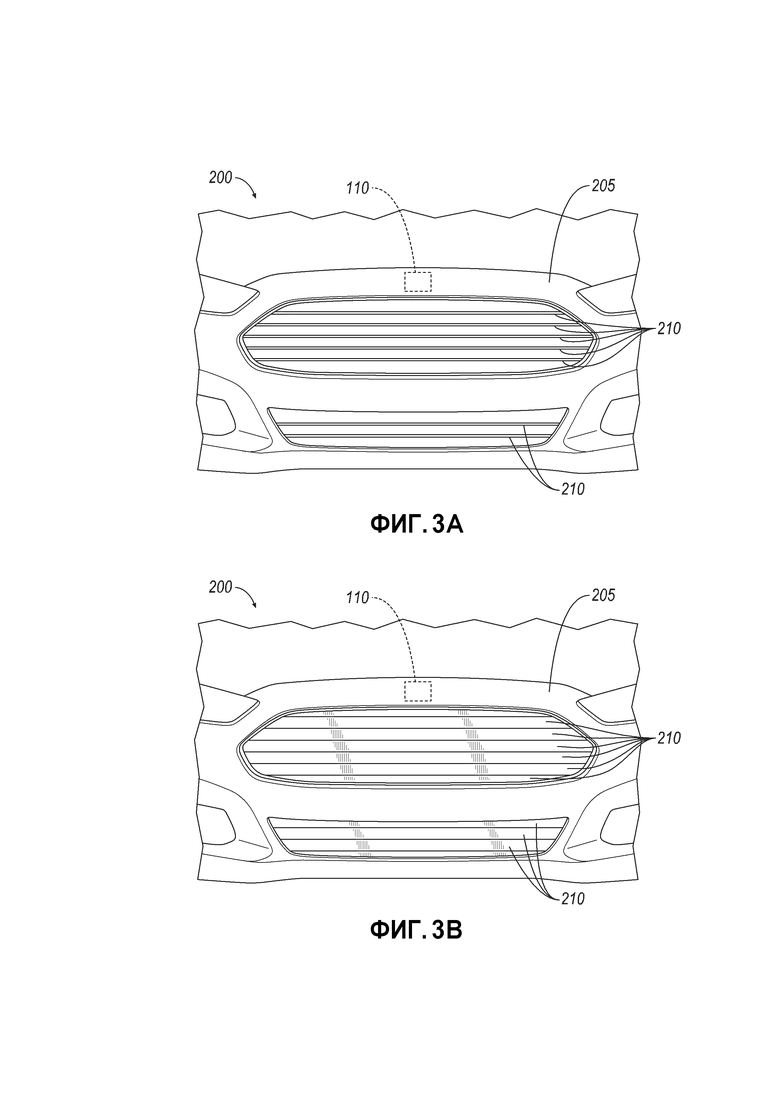
[5] Фиг. 3A - это примерный вид активной шторки решетки радиатора в открытой позиции.
[6] Фиг. 3B - это примерный вид активной шторки решетки радиатора в закрытой позиции.
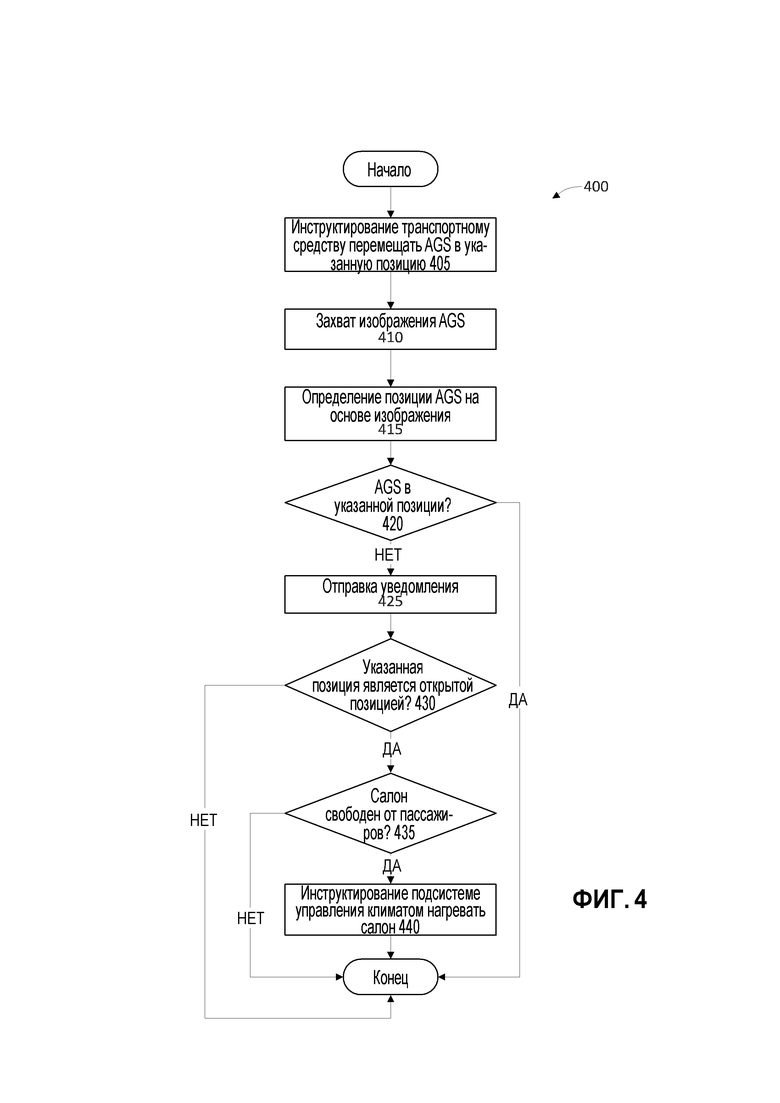
[7] Фиг. 4 - это блок-схема примерного процесса для управления активной шторкой решетки радиатора.
Подробное описание изобретения
[8] Вычислительное устройство в рассматриваемом транспортном средстве может инструктировать вычислительному устройству в целевом транспортном средстве приводить активную шторку решетки радиатора в указанную позицию. Вычислительное устройство в рассматриваемом транспортном средстве может приводить в действие камеру, чтобы захватывать инфракрасное изображение активной шторки решетки радиатора. Альтернативно или дополнительно, камера может захватывать оптическое изображение активной шторки решетки радиатора. Вычислительное устройство рассматриваемого транспортного средства может определять, на основе изображения, находится ли активная шторка решетки радиатора в указанной позиции. Когда активная шторка решетки радиатора не находится в указанной позиции, вычислительное устройство рассматриваемого транспортного средства может отправлять уведомление вычислительному устройству целевого транспортного средства. Если указанная позиция является открытой позицией, и активная шторка решетки радиатора не находится в указанной позиции, вычислительное устройство рассматриваемого транспортного средства может инструктировать подсистеме управления климатом в целевом транспортном средстве приводить в действие нагреватель при определении, что целевое транспортное средство не имеет пассажиров.
[9] Фиг. 1 иллюстрирует систему 100 для управления активной шторкой решетки радиатора в транспортном средстве 101. Вычислительное устройство 105 в транспортном средстве 101 программируется, чтобы принимать собранные данные 115 от одного или более датчиков 110. Например, данные 115 транспортного средства 101 могут включать в себя местоположение транспортного средства 101, местоположение цели и т.д. Данные о местоположении могут быть известны, например, из географических координат, таких как координаты широты и долготы, полученных через навигационную систему, которая известна, которая использует систему глобального позиционирования (GPS). Дополнительно, примеры данных 115 могут включать в себя показатели измерений систем и компонентов транспортного средства 101, например, скорость транспортного средства 101, траекторию транспортного средства 101 и т.д.
[10] Вычислительное устройство 105, как правило, программируется для связи по сети транспортного средства 101, например, включающей в себя шину связи, которая известна. Через сеть, шину и/или другие проводные или беспроводные механизмы (например, проводную или беспроводную локальную вычислительную сеть в транспортном средстве 101), вычислительное устройство 105 может передавать сообщения различным устройствам в транспортном средстве 101 и/или принимать сообщения от различных устройств, например, контроллеров, приводов, датчиков и т.д., включающих в себя датчики 110. Альтернативно или дополнительно, в случаях, когда вычислительное устройство 105 фактически содержит множество устройств, сеть транспортного средства может быть использована для связи между устройствами, представленными как вычислительное устройство 105 в этом описании изобретения. Кроме того, вычислительное устройство 105 может быть запрограммировано для связи с сетью 125, которая, как описано ниже, может включать в себя различные проводные и/или беспроводные технологии сетевого взаимодействия, например, сотовые, Bluetooth, проводные и/или беспроводные сети с коммутацией пакетов и т.д.
[11] Хранилище 106 данных может быть любого известного типа, например, накопителями на жестких дисках, твердотельными накопителями, серверами или любыми энергозависимыми или энергонезависимыми носителями. Хранилище 106 данных может хранить накопленные данные 115, отправленные от датчиков 110.
[12] Датчики 110 могут включать в себя множество устройств. Например, как известно, различные контроллеры в транспортном средстве 101 могут функционировать в качестве датчиков 110, чтобы предоставлять данные 115 через сеть или шину транспортного средства 101, например, данные 115, относящиеся к скорости транспортного средства, ускорению, позиции, состоянию подсистемы и/или компонента, и т.д. Дополнительно, другие датчики 110 могут включать в себя камеры, датчики движения и т.д., т.е., датчики 110, чтобы предоставлять данные 115 для оценки местоположения цели, проецирования пути для маневра парковки, оценки местоположения полосы проезжей части и т.д. Датчики 110 могут также включать в себя радар малого радиуса действия, радар большого радиуса действия, лидар и/или ультразвуковые измерительные преобразователи.
[13] Накопленные данные 115 могут включать в себя множество данных, накопленных в транспортном средстве 101. Примеры накопленных данных 115 предоставлены выше, и, кроме того, данные 115, в целом, собираются с помощью одного или более датчиков 110 и могут дополнительно включать в себя данные, вычисленные из них в вычислительном устройстве 105 и/или на сервере 130. В целом, накопленные данные 115 могут включать в себя любые данные, которые могут быть собраны посредством датчиков 110 и/или вычислены из таких данных.
[14] Транспортное средство 101 может включать в себя множество подсистем 120. Каждая подсистема 120 включает в себя один или более компонентов транспортного средства 101, которые вместе работают, чтобы выполнять функцию транспортного средства 101. Например, подсистемы 120 могут включать в себя, например, подсистему движения (включающую в себя, например, двигатель внутреннего сгорания и/или электромотор и т.д.), трансмиссию, подсистему рулевого управления, тормозную подсистему, подсистему помощи парковке, адаптивную подсистему автоматического поддержания скорости движения, адаптивную подсистему рулевого управления и т.д.
[15] Вычислительное устройство 105 может приводить в действие подсистемы 120, чтобы управлять компонентами транспортного средства 101, например, останавливать транспортное средство 101, чтобы избегать целей, и т.д. Вычислительное устройство 105 может быть запрограммировано, чтобы управлять некоторой или всеми подсистемами 120 с ограниченным входным воздействием или без входного воздействия от водителя-человека, т.е., вычислительное устройство 105 может быть запрограммировано, чтобы управлять подсистемами 120. Когда вычислительное устройство 105 управляет подсистемами 120, вычислительное устройство 105 может игнорировать входные данные от водителя-человека относительно подсистем 120, выбранных для управления посредством вычислительного устройства 105, которое предоставляет инструкции, например, через шину связи транспортного средства 101 и/или электронные блоки управления (ECU), которые известны, чтобы приводить в действие компоненты транспортного средства 101, например, применять тормоза, изменять угол поворота рулевого колеса и т.д. Например, если водитель-человек пытается повернуть рулевое колесо во время операции рулевого управления, вычислительное устройство 105 может игнорировать перемещение рулевого колеса и рулить транспортным средством 101 согласно своему программированию.
[16] Когда вычислительное устройство 105 управляет транспортным средством 101, транспортное средство 101 является "автономным" транспортным средством 101. В целях этого описания выражение "автономное транспортное средство" используется, чтобы ссылаться на транспортное средство 101, работающее в полностью автономном режиме. Полностью автономный режим определяется как режим, в котором каждая из подсистем движения транспортного средства 101 (типично через силовую передачу, включающую в себя электромотор и/или двигатель внутреннего сгорания), торможения и рулевого управления управляется посредством вычислительного устройства 105.
[17] Система 100 может дополнительно включать в себя сеть 125, соединенную с сервером 130 и хранилищем 135 данных. Компьютер 105 может быть дополнительно запрограммирован, чтобы связываться с одним или более удаленными узлами, такими как сервер 130, через сеть 125, такой удаленный узел возможно включает в себя хранилище 135 данных. Сеть 125 представляет один или более механизмов, посредством которых компьютер 105 транспортного средства может связываться с удаленным сервером 130. Соответственно, сеть 125 может быть одним или более из различных проводных или беспроводных механизмов связи, включающих в себя любую желаемую комбинацию проводных (например, кабель и волокно) и/или беспроводных (например, сотовая связь, беспроводная связь, спутниковая связь, микроволновая связь и радиочастотная связь) механизмов связи и любую желаемую топологию сети (или топологии, когда используется множество механизмов связи). Примерные сети связи включают в себя беспроводные сети связи (например, использующие Bluetooth, IEEE 802.11, связь между транспортными средствами (V2V), такую как выделенная связь ближнего действия (DSRC) и т.д.), локальные вычислительные сети (LAN) и/или глобальные вычислительные сети (WAN), включающие в себя Интернет, предоставляющие услуги передачи данных.
[18] Фиг. 2A-2B иллюстрируют транспортные средства 101, выполняющие диагностику по активной шторке 200 решетки радиатора. В примере на фиг. 2A рассматриваемое транспортное средство 101a, т.е., первое транспортное средство 101a, находится впереди целевого транспортного средства 101b, т.е., второго транспортного средства 101b. Рассматриваемое транспортное средство 101a имеет камеру 110 заднего вида, которая может захватывать изображение активной шторки 200 решетки радиатора целевого транспортного средства 101b. Камера 110 может захватывать инфракрасное изображение активной шторки 200 решетки радиатора. Альтернативно или дополнительно, камера 110 может захватывать оптическое изображение активной шторки 200 решетки радиатора, т.е., изображение, захватываемое с помощью видимого света. Кроме того, как показано в примере на фиг. 2B, рассматриваемое транспортное средство 101a может иметь переднюю камеру 110, которая захватывает изображение активной шторки 200 решетки радиатора. Рассматриваемое транспортное средство 101a может использовать переднюю камеру 110, когда, по меньшей мере, одно из рассматриваемого транспортного средства 101a и целевого транспортного средства 101b является неподвижным, например, на парковочном месте, в гараже и т.д.
[19] Каждое транспортное средство 101 может включать в себя активную шторку 200 решетки радиатора. Активная шторка 200 решетки радиатора позиционируется на переднем конце транспортного средства 101. Активная шторка 200 решетки радиатора привносит воздух в подсистему 120 охлаждения, которая может управлять температурами охлаждающей жидкости подсистемы движения, управлять климатом, выбросами выхлопного газа и т.д. Активная шторка 200 решетки радиатора перемещается из открытой позиции в закрытую позицию. В открытой позиции окружающий воздух привносится в транспортное средство 101. В закрытой позиции предотвращается поступление воздуха в транспортное средство 101 через шторку 200 решетки радиатора. Типично, активная шторка 200 решетки радиатора находится в закрытой позиции при запуске подсистемы движения, предоставляя возможность подсистеме движения (например, двигателю внутреннего сгорания) достигать эффективной рабочей температуры без дополнительного эффекта охлаждения окружающего воздуха. Кроме того, активная шторка 200 решетки радиатора уменьшает лобовое сопротивление транспортного средства 101 в закрытой позиции. Т.е., когда подсистема движения не требует дополнительного охлаждения, вычислительное устройство 105 перемещает активную шторку 200 решетки радиатора в закрытую позицию, чтобы уменьшать аэродинамическое сопротивление, уменьшая расход топлива.
[20] Рассматриваемое транспортное средство 101a может выполнять диагностику активной шторки 200 решетки радиатора целевого транспортного средства 101b. Вычислительное устройство 105a целевого транспортного средства 101a может инструктировать вычислительному устройству 105b целевого транспортного средства 101b перемещать панели 210 шторки 200 решетки радиатора в указанную позицию, например, полностью открытую позицию, полностью закрытую позицию и т.д. Камера 110 рассматриваемого транспортного средства 101a может захватывать изображение активной шторки решетки радиатора целевого транспортного средства 101b в указанной позиции. На основе изображения вычислительное устройство 105a рассматриваемого транспортного средства 101a может определять, находится ли шторка решетки радиатора в указанной позиции. Например, если изображение является тепловым инфракрасным изображением, вычислительное устройство 105a может сравнивать температуру от шторки 200 решетки радиатора с температурой окружающего воздуха. На основе различия между температурой шторки 200 решетки радиатора и температурой окружающего воздуха вычислительное устройство 105a может определять, находится ли шторка решетки радиатора в указанной позиции.
[21] При определении, что активная шторка 200 решетки радиатора неисправна, вычислительное устройство 105b целевого транспортного средства 101b может выполнять контрмеры, чтобы смягчать последствия неисправности активной шторки 200 решетки радиатора. Например, вычислительное устройство 105b может идентифицировать место ремонта и приводить в действие подсистемы 120b, чтобы перемещать целевое транспортное средство 101b к месту ремонта. В другом примере вычислительное устройство 105b может уменьшать выходную мощность подсистемы 120b движения, чтобы уменьшать создаваемое тепло и аэродинамическое сопротивление в транспортном средстве 101b.
[22] Активная шторка 200 решетки радиатора может включать в себя датчик 110 шторки решетки радиатора, как показано на фиг. 3A и 3B. Датчик 110 шторки решетки радиатора может быть, например, датчиком на эффекте Холла. Датчик 110 шторки решетки радиатора определяет позицию панелей 210 и передает позицию вычислительному устройству 105. Однако, датчик 110 шторки решетки радиатора может неправильно срабатывать, идентифицируя позицию панелей 210, когда панели 210 заклинили и/или находятся в другой позиции. Вычислительное устройство 105b целевого транспортного средства 101b может отправлять уведомление вычислительному устройству 105a рассматриваемого транспортного средства 101a, указывающее показание от датчика 110 шторки решетки радиатора. Т.е., вычислительное устройство 105a может инструктировать датчику 110 шторки радиатора определять, находится ли шторка 200 решетки радиатора в указанной позиции, и отправлять другое уведомление вычислительному устройству 105b, указывающее неисправность датчика 110 шторки решетки радиатора, когда определение посредством датчика 110 шторки решетки радиатора отличается от определения на основе изображения.
[23] Фиг. 3A иллюстрирует примерную активную шторку 200 решетки радиатора транспортного средства 101 в открытой позиции. Шторка 200 решетки радиатора включает в себя рамку 205. Рамка 205 присоединяется к кузову транспортного средства 101. Рамка 205 поддерживает с возможностью вращения множество панелей 210. Панели 210 являются поворачиваемыми из открытой позиции в закрытую позицию. Вычислительное устройство 105 может приводить в действие мотор (не показан), чтобы поворачивать панели 210.
[24] Когда панели находятся в открытой позиции, как показано на фиг. 3A, воздух снаружи транспортного средства 101 втягивается в транспортное средство 101 для использования, например, в подсистеме 120 охлаждения подсистемы движения, подсистеме 120 управления климатом и т.д. Таким образом, когда температура подсистемы движения превышает предварительно определенное пороговое значение, вычислительное устройство 105 может поворачивать панели 210 в открытую позицию, чтобы втягивать более холодный окружающий воздух в транспортное средство 101.
[25] Фиг. 3B иллюстрирует примерную активную шторку 200 решетки радиатора транспортного средства 101 в закрытой позиции. Когда панели 210 находятся в закрытой позиции, втягивание воздуха в транспортное средство 101 предотвращается. Когда воздух втягивается в транспортное средство 101, воздух толкается в салон транспортного средства 101, увеличивая лобовое сопротивление транспортного средства 101 и увеличивая расход топлива. Таким образом, когда панели 210 находятся в закрытой позиции, воздух проходит поверх транспортного средства 101, уменьшая аэродинамическое сопротивление и увеличивая топливную эффективность транспортного средства 101. Когда подсистемы 120 не требуют дополнительного охлаждения, вычислительное устройство 105 может перемещать активную шторку 200 решетки радиатора в закрытую позицию, чтобы уменьшать аэродинамическое сопротивление. Кроме того, когда транспортное средство 101 запускает двигатель внутреннего сгорания, активная шторка 200 решетки радиатора может оставаться в закрытой позиции, чтобы увеличивать температуру в транспортном средстве 101 до тех пор, пока двигатель не потребует дополнительного охлаждения.
[26] Вычислительное устройство 105 может определять, находится ли активная шторка 200 решетки радиатора в указанной позиции, захватывая инфракрасное изображение активной шторки 200 решетки радиатора. Вычислительное устройство 105 может использовать инфракрасное изображение активной шторки 200 решетки радиатора, чтобы определять перепад температуры между температурой окружающего воздуха и температурой активной шторки 200 решетки радиатора. Например, когда активная шторка 200 решетки радиатора находится в открытой позиции, инфракрасное изображение активной шторки 200 решетки радиатора должно указывать, что температура активной шторки 200 решетки радиатора выше температуры окружающего воздуха, по меньшей мере, на предварительно определенную пороговую величину. Вычислительное устройство 105 может определять температуру окружающего воздуха с помощью датчика 110 температуры, который известен. Вычислительное устройство 105 может инструктировать активной шторке 200 решетки радиатора перемещаться в открытую позицию и захватывать инфракрасное изображение активной шторки 200 решетки радиатора с помощью камеры 110. Когда вычислительное устройство 105 определяет, что температура активной шторки 200 решетки радиатора не выше температуры окружающего воздуха, по меньшей мере, на предварительно определенную пороговую величину, вычислительное устройство 105 может определять, что активная шторка 200 решетки радиатора не находится в открытой позиции.
[27] В другом примере вычислительное устройство 105 может инструктировать активной шторке 200 решетки радиатора перемещаться в закрытую позицию. В закрытой позиции инфракрасное изображение активной шторки 200 решетки радиатора должно быть в пределах предварительно определенного порогового значения температуры окружающего воздуха. Когда вычислительное устройство 105 определяет, что температура активной шторки 200 решетки радиатора выше температуры окружающего воздуха, по меньшей мере, на предварительно определенную пороговую величину, вычислительное устройство 105 может определять, что активная шторка 200 решетки радиатора не находится в закрытой позиции.
[28] Вычислительное устройство 105 может определять, находится ли активная шторка 200 решетки радиатора в указанной позиции, захватывая оптическое изображение активной шторки 200 решетки радиатора и сравнивая оптическое изображение с сохраненным изображением активной шторки 200 решетки радиатора. Вычислительное устройство 105 может использовать известные технологии вычитания изображения, чтобы определять различие между оптическим изображением и сохраненным изображением. Т.е., вычислительное устройство 105 вычитает оптическое изображение из сохраненного изображения, создавая разностное изображение, которое показывает фрагменты одного из изображений, которые не присутствуют в другом из изображений. Например, если вычислительное устройство 105 вычитает оптическое изображение активной шторки 200 решетки радиатора в открытой позиции из сохраненного изображения другой шторки решетки радиатора в закрытой позиции, разностное изображение будет показывать панели 210, которые находятся в закрытой позиции. Вычислительное устройство 105 может анализировать разностное изображение, чтобы определять, находится ли шторка 200 решетки радиатора в указанной позиции. Например, если количество пикселов в разностном изображении выше предварительно определенного порогового значения, вычислительное устройство 105 может определять, что панели 210 находятся в указанной позиции, и активная шторка 200 решетки радиатора является неисправной. Альтернативно, вычислительное устройство 105 может анализировать указанный фрагмент разностного изображения, соответствующий фрагментам оптического изображения и сохраненного изображения, отображающим панели 210. Если указанный фрагмент является пустым, т.е., технологии вычитания изображений удалили пикселы из указанного фрагмента, тогда вычислительное устройство 105 может определять, что панели 210 были перемещены в указанную позицию, и активная шторка 200 решетки радиатора является функционирующей.
[29] Когда вычислительное устройство 105 определяет, что шторка 200 решетки радиатора не находится в указанной позиции, вычислительное устройство 105 может отправлять уведомление, указывающее, что активная шторка 200 решетки радиатора является неисправной. Например, вычислительное устройство 105a рассматриваемого транспортного средства 101a может отправлять уведомление вычислительному устройству 105b целевого транспортного средства 101b, указывающее, что активная шторка 200 решетки радиатор является неисправной. Вычислительное устройство 105a может инструктировать вычислительному устройству 105b определять, находятся ли пассажиры в целевом транспортном средстве 101b. Вычислительное устройство 105b может определять, существуют ли пассажиры в салоне, с помощью, например, датчиков веса сидений, камер и т.д. Если вычислительное устройство 105b определяет, что пассажиры не присутствуют в целевом транспортном средстве 101b, вычислительное устройство 105a может инструктировать вычислительному устройству 105b приводить в действие подсистему 120 управления климатом. Например, если указанная позиция является открытой позицией, и активная шторка 200 решетки радиатора не находится в открытой позиции, подсистема 120 движения целевого транспортного средства 101b может увеличивать температуру, требуя дополнительного охлаждения. Таким образом, вычислительное устройство 105a может приводить в действие подсистему 120 управления климатом в целевом транспортном средстве 101b, чтобы увеличивать нагрев салона целевого транспортного средства 101b, уменьшая температуру подсистемы 120 движения целевого транспортного средства 101b.
[30] Фиг. 4 иллюстрирует примерный процесс 400 для определения того, является ли функциональной активная шторка 200 решетки радиатора. Процесс 400 начинается на этапе 405, в котором рассматриваемое транспортное средство 101a инструктирует целевому транспортному средству 101b перемещать активную шторку 200 решетки радиатора в указанную позицию. Указанная позиция может быть открытой позицией, как показано на фиг. 3A, или закрытой позицией, как показано на фиг. 3B. Вычислительное устройство 105b целевого транспортного средства 101b инструктирует мотору активной шторки 200 решетки радиатора перемещать панели 210 в указанную позицию.
[31] Далее, на этапе 410, вычислительное устройство 105a рассматриваемого транспортного средства 101a приводит в действие камеру 110, чтобы захватывать изображение активной шторки 200 решетки радиатора. Изображение может быть инфракрасным изображением и/или оптическим изображением. Как показано на фиг. 2A и 2B, камера 110 может быть камерой 110 заднего вида или фронтальной камерой 110 на основе того, где рассматриваемое транспортное средство 101a находится относительно целевого транспортного средства 101b.
[32] Далее, на этапе 415, вычислительное устройство 105a рассматриваемого транспортного средства 101a определяет позицию панелей 210 активной шторки 200 решетки радиатора на основе изображения. Как описано выше, если изображение является инфракрасным изображением, вычислительное устройство 105a может сравнивать температуру шторки 200 решетки радиатора, которая определена по инфракрасному изображению, с температурой окружающего воздуха. Если изображение является оптическим изображением, вычислительное устройство 105a может применять технологии вычитания изображений, чтобы создавать разностное изображение, как обсуждалось выше, между оптическим изображением и сохраненным изображением шторки решетки радиатора в указанной позиции этапа 405.
[33] Далее, на этапе 420, вычислительное устройство 105a рассматриваемого транспортного средства 101a определяет, является ли позиция активной шторки 200 решетки радиатора указанной позицией. Например, если вычислительное устройство 105a определяет, что активная шторка 200 решетки радиатора находится в закрытой позиции, и указанная позиция является открытой позицией, вычислительное устройство 105a может определять, что активная шторка 200 решетки радиатора не находится в указанной позиции. Если активная шторка 200 решетки радиатора находится в указанной позиции, активная шторка 200 решетки радиатора работает правильно, т.е., активная шторка 200 решетки радиатора находится в указанной позиции и будет перемещаться в другую позицию, когда инструктируется посредством вычислительного устройства 105b. Следом за этапом 420, когда активная шторка 200 решетки радиатора находится в указанной позиции, процесс 400 заканчивается. Иначе, процесс 400 продолжается на этапе 425.
[34] На этапе 424 вычислительное устройство 105a рассматриваемого транспортного средства 101a отправляет уведомление вычислительному устройству 105b целевого транспортного средства 101b, указывающее, что активная шторка 200 решетки радиатора не находится в указанной позиции. Поскольку активная шторка 200 решетки радиатора не находится в указанной позиции, активная шторка 200 решетки радиатора может быть неисправной. Альтернативно или дополнительно, датчик 110 шторки решетки радиатора может быть неисправным, если датчик 110 шторки решетки радиатора указывает, что шторка 200 решетки радиатора находится в указанной позиции, когда вычислительное устройство 105a определяет иное. Уведомление может включать в себя указание, что шторка 200 решетки радиатора и/или датчик 110 шторки решетки радиатора является неисправным.
[35] Далее, на этапе 430, вычислительное устройство 105a рассматриваемого транспортного средства 101a определяет, является ли позиция активной шторки 200 решетки радиатора открытой позицией. Если указанная позиция является открытой позицией, тогда активная шторка 200 решетки радиатора не находится в открытой позиции, что может приводить в результате к увеличенной температуре подсистемы 120 движения целевого транспортного средства 101b. Если указанная позиция является открытой позицией, процесс 400 продолжается на этапе 435. Иначе, процесс 400 заканчивается.
[36] На этапе 435 вычислительное устройство 105a инструктирует вычислительному устройству 105b определять, свободен ли салон целевого транспортного средства 101b от пассажиров. Чтобы увеличивать охлаждение подсистемы 120 движения целевого транспортного средства 101b, вычислительное устройство 105b может приводить в действие подсистему 120 управления климатом, чтобы нагревать салон целевого транспортного средства 101b. Однако, вычислительное устройство 105b должно обогревать салон, только когда не присутствуют пассажиры. Вычислительное устройство 105b может определять, существуют ли пассажиры в салоне, с помощью, например, датчиков веса сидений, камер и т.д. Если вычислительное устройство 105b определяет, что салон свободен от пассажиров, процесс 400 продолжается на этапе 440. Иначе, процесс 400 заканчивается.
[37] На этапе 440 вычислительное устройство 105a рассматриваемого транспортного средства 101a инструктирует вычислительному устройству 105b целевого транспортного средства 101b приводить в действие подсистему 120 управления климатом, чтобы обогревать салон целевого транспортного средства 101b. Поскольку активная шторка 200 решетки радиатора не находится в открытой позиции, подсистема 120 движения может требовать дополнительного охлаждения. Обогрев салона целевого транспортного средства 101b с помощью подсистемы 120 управления климатом может снижать температуру подсистемы 120 движения. Следом за этапом 440 процесс 400 заканчивается.
[38] Когда используется в данном документе, наречие "практически", преобразующее прилагательное, означает, что форма, структура, показатель, значение, вычисление и т.д. может отклоняться от точно описанной геометрии, расстояния, показателя, значения, вычисления и т.д. вследствие несовершенств в материалах, механической обработке, производстве, показателях модуля сбора данных, вычислениях, времени обработки, времени связи и т.д.
[39] Вычислительные устройства 105, как правило, каждое, включают в себя инструкции, исполняемые одним или более вычислительными устройствами, такими как идентифицированные выше, и для выполнения блоков или этапов процессов, описанных выше. Компьютерно-исполняемые инструкции могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с помощью множества языков и/или технологий программирования, включающих в себя, без ограничения, и либо отдельно, либо в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В целом, процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя и т.д. и выполняет эти инструкции, таким образом, выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и передаваться с помощью множества компьютерно-читаемых носителей. Файл в вычислительном устройстве 105, в целом, является совокупностью данных, сохраненных на считываемом компьютером носителе, таком как носитель хранения, оперативное запоминающее устройство и т.д.
[40] Компьютерно-читаемый носитель включает в себя любой носитель, который участвует в предоставлении данных (например, инструкций), который может быть считан посредством компьютера. Такой носитель может принимать многие формы, включающие в себя, но не только, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители включают в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[41] Что касается носителей, процессов, систем, способов и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Например, в процессе 400 один или более этапов могут быть опущены, или этапы могут быть выполнены в порядке, отличном от показанного на фиг. 4. Другими словами, описания системы и/или процессов в данном документе предоставлены с целью иллюстрации некоторых вариантов осуществления и не должны никоим образом истолковываться как ограничивающие раскрытый предмет изучения.
[42] Соответственно, должно быть понятно, что настоящее изобретение, включающее в себя вышеприведенное описание и сопровождающие чертежи и приведенную ниже формулу изобретения, предназначено быть иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от предоставленных примеров, будут понятны специалистам в области техники по прочтении вышеприведенного описания. Рамки изобретения должны быть определены, не со ссылкой на вышеприведенное описание, а вместо этого должны быть определены со ссылкой на формулу изобретения, приложенную к нему и/или включенную в непредварительную патентную заявку, основанную на данном описании, вместе с полными рамками эквивалентов, к которым такие пункты формулы изобретения приписаны. Ожидается и предполагается, что будущие разработки произойдут в технологиях, обсужденных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. Резюмируя, должно быть понятно, что раскрытый предмет изучения допускает модификацию и изменение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С ВОЗМОЖНОСТЬЮ УПРАВЛЕНИЯ ФАРАМИ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2017 |
|
RU2680947C2 |
| СПОСОБ, СИСТЕМА И ОБЪЕКТ ДЛЯ СЕАНСА ПЕРЕДАЧИ МУЛЬТИМЕДИА В ИНФРАСТРУКТУРЕ IMS | 2017 |
|
RU2753302C1 |
| СВЕТОВОДНАЯ СТРУКТУРА, ГОЛОГРАФИЧЕСКОЕ ОПТИЧЕСКОЕ УСТРОЙСТВО И СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ | 2014 |
|
RU2603238C2 |
| МОДИФИЦИРОВАННАЯ ПЕРЕВЕРНУТАЯ F-АНТЕННА ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2386197C1 |
| ФИКСИРУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2580923C2 |
| ОБНАРУЖЕНИЕ НАПРАВЛЕНИЯ ПОЛОСЫ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2711031C2 |
| УЛУЧШЕННОЕ ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ | 2015 |
|
RU2708534C2 |
| УПРАВЛЯЕМЫЕ ЗАПИСЫВАЕМЫЕ ТРЕХСТОРОННИЕ ВЫЗОВЫ | 2012 |
|
RU2567860C1 |
| МИКРОВОЛНОВОЕ НАГРЕВАТЕЛЬНОЕ УСТРОЙСТВО | 2009 |
|
RU2474092C2 |
| ЭЛЕКТРИЧЕСКОЕ СОЕДИНЕНИЕ, ИМЕЮЩЕЕ УЛУЧШЕННЫЙ ПРОХОДНОЙ ЭЛЕМЕНТ | 2021 |
|
RU2823118C1 |
Изобретение относится к решеткам радиатора транспортного средства. Первое транспортное средство инструктирует второму транспортному средству перемещать шторку решетки радиатора в указанную позицию. Захватывается изображение шторки решетки радиатора. Находится ли шторка решетки радиатора в указанной позиции, определяется по меньшей мере частично на основе изображения. Второму транспортному средству сообщается указание неисправности, когда шторка решетки радиатора не находится в указанной позиции. Достигается уменьшение аэродинамического сопротивления транспортного средства. 3 н. и 15 з.п. ф-лы, 6 ил.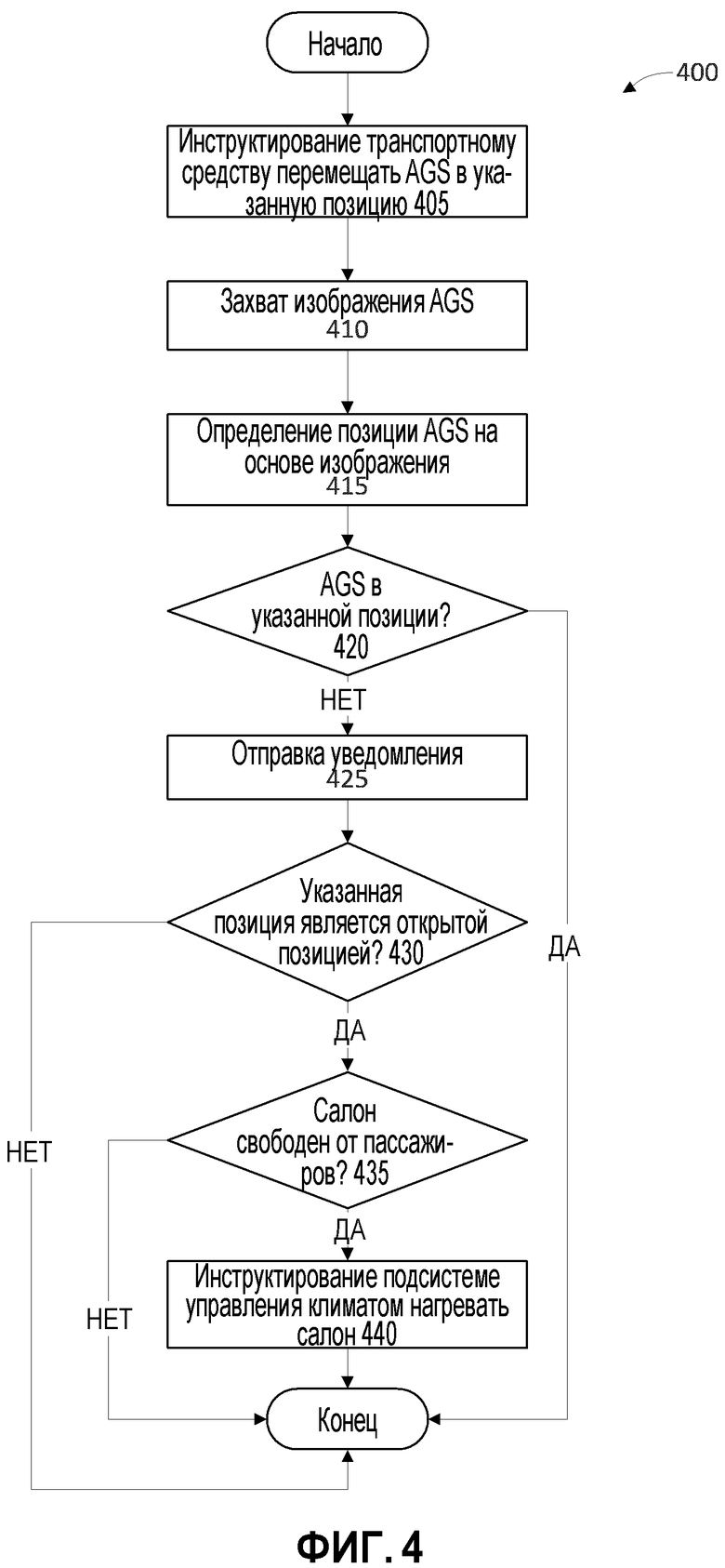
1. Система управления шторкой решетки радиатора, содержащая компьютер, запрограммированный, чтобы:
из первого транспортного средства инструктировать второму транспортному средству перемещать шторку решетки радиатора в указанную позицию;
захватывать изображение шторки решетки радиатора;
определять, находится ли шторка решетки радиатора в указанной позиции по меньшей мере частично на основе изображения; и
сообщать второму транспортному средству указание неисправности, когда шторка решетки радиатора не находится в указанной позиции.
2. Система по п. 1, в которой указанная позиция является открытой позицией.
3. Система по п. 2, в которой компьютер дополнительно программируется, чтобы определять температуру шторки решетки радиатора по меньшей мере частично на основе изображения и сообщать второму транспортному средству указание неисправности, когда температура шторки решетки радиатора находится в пределах предварительно определенного порогового значения температуры окружающего воздуха.
4. Система по п. 3, в которой компьютер дополнительно программируется, чтобы инструктировать второму транспортному средству определять, присутствуют ли пассажиры во втором транспортном средстве, и приводить в действие подсистему управления климатом, когда пассажиры не присутствуют во втором транспортном средстве.
5. Система по п. 1, в которой указанная позиция является закрытой позицией.
6. Система по п. 5, в которой компьютер дополнительно программируется, чтобы определять температуру шторки решетки радиатора по меньшей мере частично на основе изображения и сообщать второму транспортному средству указание неисправности, когда температура шторки решетки радиатора выше предварительно определенного порогового значения температуры окружающего воздуха.
7. Система по п. 1, в которой компьютер дополнительно программируется, чтобы сравнивать изображение шторки решетки радиатора с сохраненным изображением другой шторки решетки радиатора в указанной позиции и определять, находится ли шторка решетки радиатора в указанной позиции.
8. Система по п. 1, в которой компьютер дополнительно программируется, чтобы захватывать изображение с помощью камеры заднего вида.
9. Система по п. 1, в которой компьютер дополнительно программируется, чтобы инструктировать датчику шторки решетки радиатора второго транспортного средства определять, находится ли шторка решетки радиатора в указанной позиции, и сообщать второму транспортному средству указание неисправности в датчике шторки решетки радиатора, когда определение посредством датчика шторки решетки радиатора отличается от определения на основе изображения.
10. Способ управления шторкой решетки радиатора, содержащий этапы, на которых:
из первого транспортного средства инструктируют второму транспортному средству перемещать шторку решетки радиатора в указанную позицию;
захватывают изображение шторки решетки радиатора;
определяют, находится ли шторка решетки радиатора в указанной позиции по меньшей мере частично на основе изображения; и
сообщают второму транспортному средству указание неисправности, когда шторка решетки радиатора не находится в указанной позиции.
11. Способ по п. 10, в котором указанная позиция является открытой позицией.
12. Способ по п. 11, дополнительно содержащий этапы, на которых определяют температуру шторки решетки радиатора по меньшей мере частично на основе изображения и сообщают второму транспортному средству указание неисправности, когда температура шторки решетки радиатора находится в пределах предварительно определенного порогового значения температуры окружающего воздуха.
13. Способ по п. 12, дополнительно содержащий этапы, на которых инструктируют второму транспортному средству определять, присутствуют ли пассажиры во втором транспортном средстве, и приводят в действие подсистему управления климатом, когда пассажиры не присутствуют во втором транспортном средстве.
14. Способ по п. 10, в котором указанная позиция является закрытой позицией.
15. Способ по п. 14, дополнительно содержащий этапы, на которых определяют температуру шторки решетки радиатора по меньшей мере частично на основе изображения и сообщают второму транспортному средству указание неисправности, когда температура шторки решетки радиатора выше предварительно определенного порогового значения температуры окружающего воздуха.
16. Способ по п. 10, дополнительно содержащий этапы, на которых сравнивают изображение шторки решетки радиатора с сохраненным изображением другой шторки решетки радиатора в указанной позиции и определяют, находится ли шторка решетки радиатора в указанной позиции.
17. Способ по п. 10, дополнительно содержащий этапы, на которых инструктируют датчику шторки решетки радиатора определять, находится ли шторка решетки радиатора в указанной позиции, и сообщают второму транспортному средству указание неисправности в датчике шторки решетки радиатора, когда определение посредством датчика шторки решетки радиатора отличается от определения на основе изображения.
18. Система управления шторкой решетки радиатора, содержащая компьютер, имеющий процессор и память, память хранит инструкции, исполняемые процессором, чтобы:
принимать инструкции от первого транспортного средства, чтобы перемещать активную шторку решетки радиатора второго транспортного средства в указанную позицию;
перемещать активную шторку решетки радиатора в указанную позицию; и
принимать сообщение, указывающее, является ли активная шторка решетки радиатора неисправной;
идентифицировать место ремонта; и
приводить в действие одну или более подсистем транспортного средства, чтобы перемещать второе транспортное средство к месту ремонта.
| Устройство для автоматического управления шторкой радиаторов системы жидкостного охлаждения двигателя внутреннего сгорания | 1941 |
|
SU72064A1 |
| US 20140005897 A1, 02.01.2014 | |||
| US 20140150756 A1, 05.06.2014 | |||
| KR 2010061161 A, 07.06.2010. | |||

