Уровень техники
[0001] Полосы движения дороги типично ограничивают движение транспортного средства одним направлением. Например, в Соединенных Штатах, самая правая полоса движения дороги предназначается для движения транспортного средства, движущегося прямо. Когда дорога имеет единственную полосу движения дороги, полоса движения дороги может быть предназначена для одного направления движения, т.е., является дорогой с односторонним движением. Транспортные средства, эксплуатируемые частично или полностью без пользовательского ввода, могут иметь затруднения в идентификации направления движения для полосы движения дороги во время следования по маршруту.
Сущность изобретения
Предлагается способ, содержащий этапы, на которых: идентифицируют направление полосы движения дороги на основе данных датчика транспортного средства, указывающих одно или более из дорожного знака, направления припаркованного транспортного средства и разметки на поверхности полосы движения дороги; и определяют, что траектория транспортного средства отличается от направления полосы движения дороги и затем приводят в действие компонент транспортного средства. Способ дополнительно содержит этап, на котором определяют направление припаркованного транспортного средства на основе, по меньшей мере, одного из обращенного назад отличительного признака и обращенного вперед отличительного признака припаркованного транспортного средства. Способ дополнительно содержит этап, на котором определяют направление дорожного знака на основе сравнения предварительно определенного изображения дорожного знака и текущего изображения дорожного знака. Способ дополнительно содержит этап, на котором определяют направление полосы движения на основе направления дорожного знака. Причем компонент транспортного средства является аварийной сигнализацией. Причем компонент транспортного средства является передатчиком, и способ дополнительно содержит этап, на котором отправляют сообщение владельцу транспортного средства, указывающее, что траектория транспортного средства отличается от направления полосы движения дороги. Причем компонент транспортного средства является тормозом или селектором передач. Способ дополнительно содержит этап, на котором определяют направление припаркованного транспортного средства на основе изображения припаркованного транспортного средства. Причем компонент транспортного средства является передатчиком, и способ дополнительно содержит этап, на котором отправляют сообщение, указывающее направление полосы движения другому транспортному средству. Способ дополнительно содержит этап, на котором возвращают управление компонентом транспортного средства человеку-водителю, когда траектория транспортного средства отличается от направления полосы движения дороги. Способ дополнительно содержит этап, на котором определяют направление припаркованного транспортного средства на основе изображения припаркованного транспортного средства. Способ дополнительно содержит этап, на котором возвращают управление компонентом транспортного средства человеку-водителю, когда траектория транспортного средства отличается от направления полосы движения дороги.
Также предлагается компьютер, запрограммированный для того, чтобы выполнять способ согласно настоящему изобретению.
Также предлагается транспортное средство, содержащее компьютер, запрограммированный для того, чтобы выполнять способ согласно настоящему изобретению.
Также предлагается компьютерный программный продукт, содержащий компьютерно-читаемый носитель, хранящий инструкции, исполняемые процессором компьютера, чтобы исполнять способ согласно настоящему изобретению.
Краткое описание чертежей
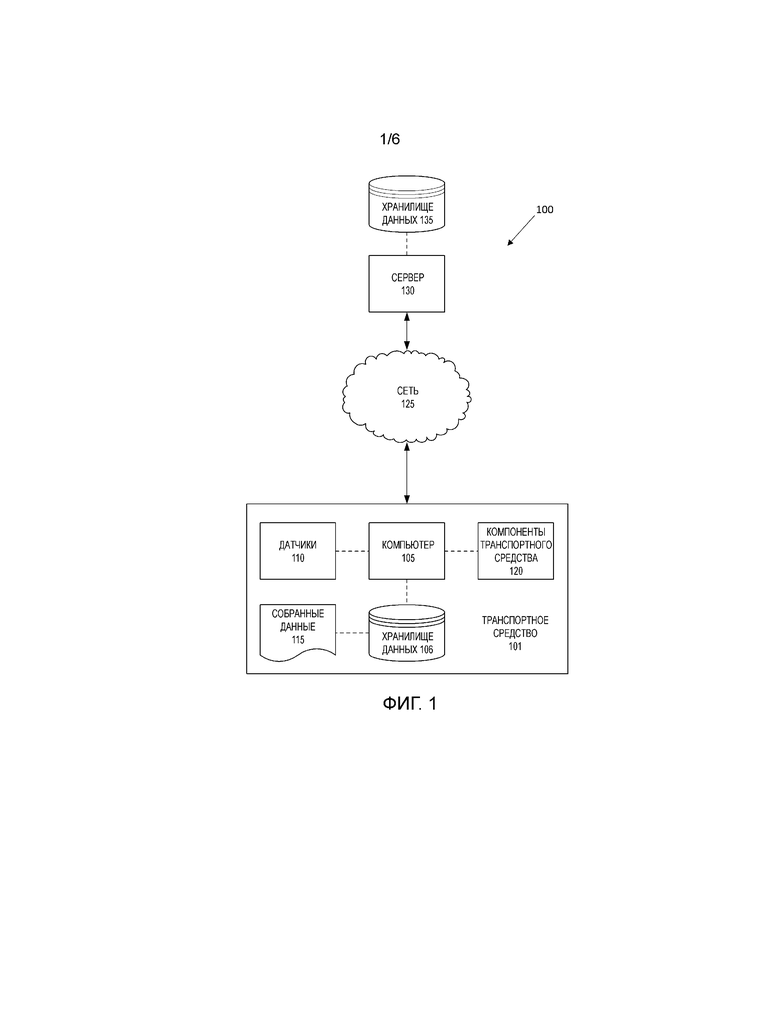
[0002] Фиг. 1 - это блок-схема примерной системы для идентификации направления полосы движения.
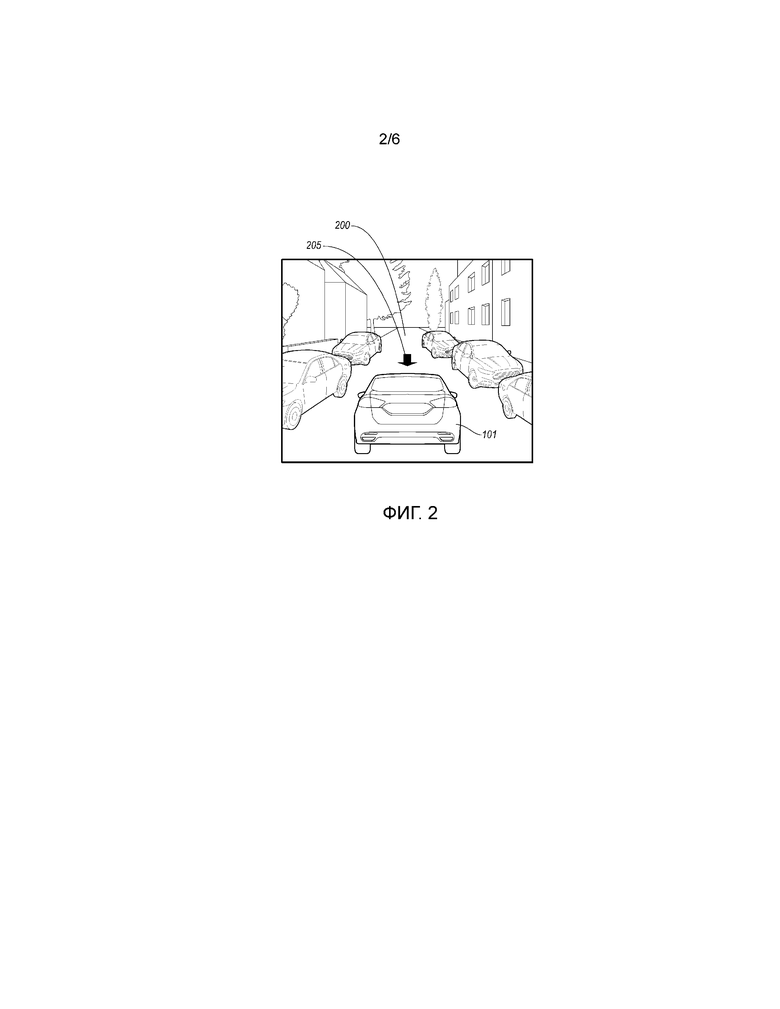
[0003] Фиг. 2 иллюстрирует идентификацию направления полосы движения посредством обнаружения разметки.
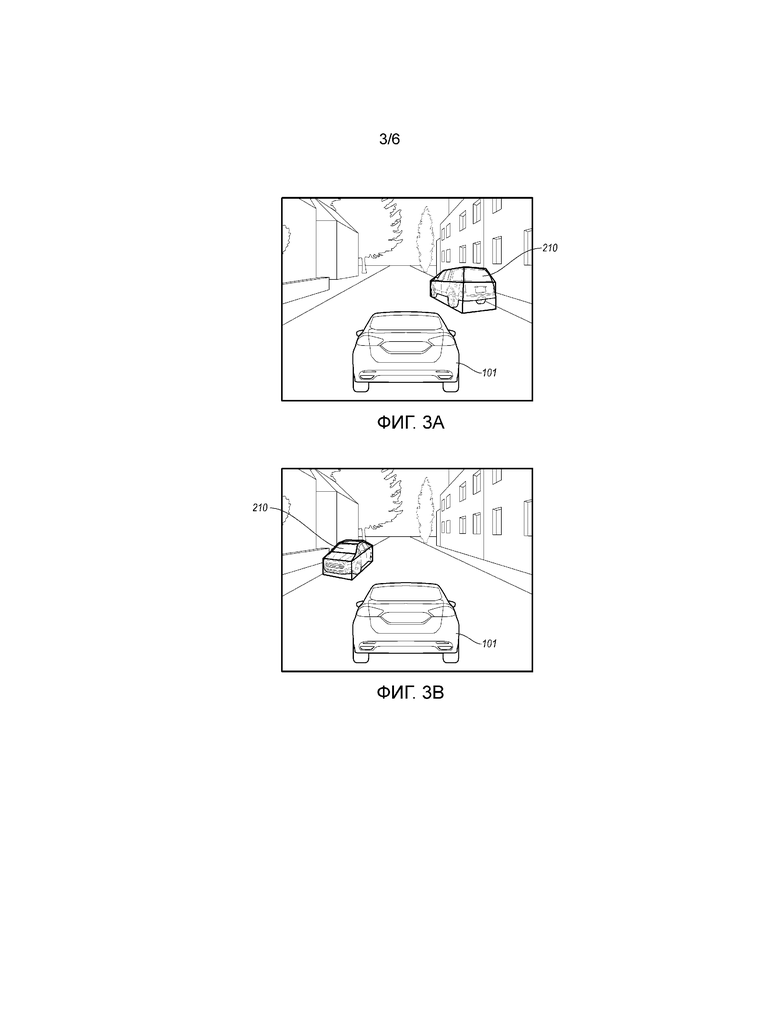
[0004] Фиг. 3A-3B иллюстрируют идентификацию направления полосы движения посредством обнаружения форм припаркованного транспортного средства.
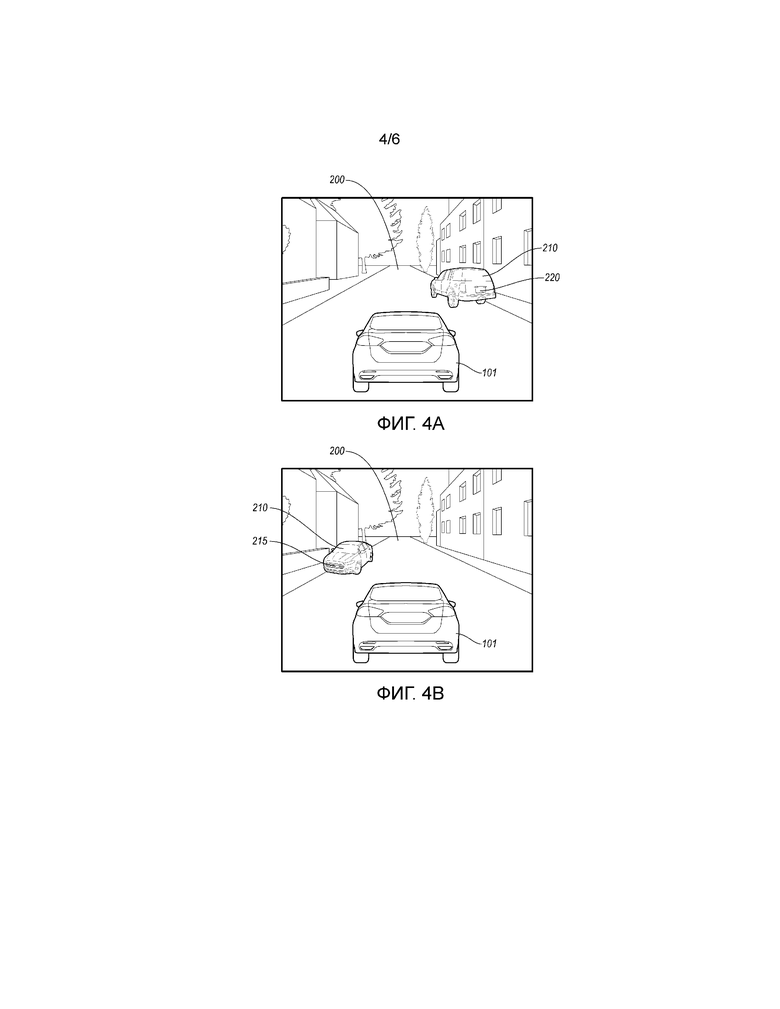
[0005] Фиг. 4A-4B иллюстрируют идентификацию направления полосы движения посредством обнаружения передних и задних отличительных признаков припаркованного транспортного средства.
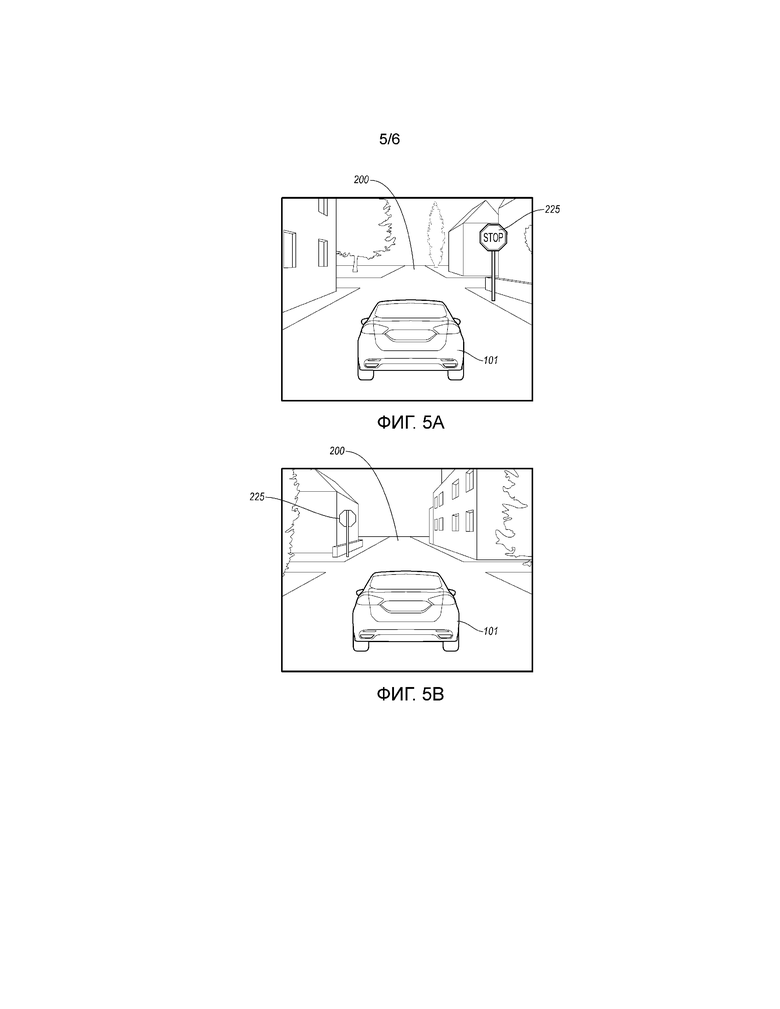
[0006] Фиг. 5A-5B иллюстрируют идентификацию направления полосы движения посредством обнаружения дорожного знака.
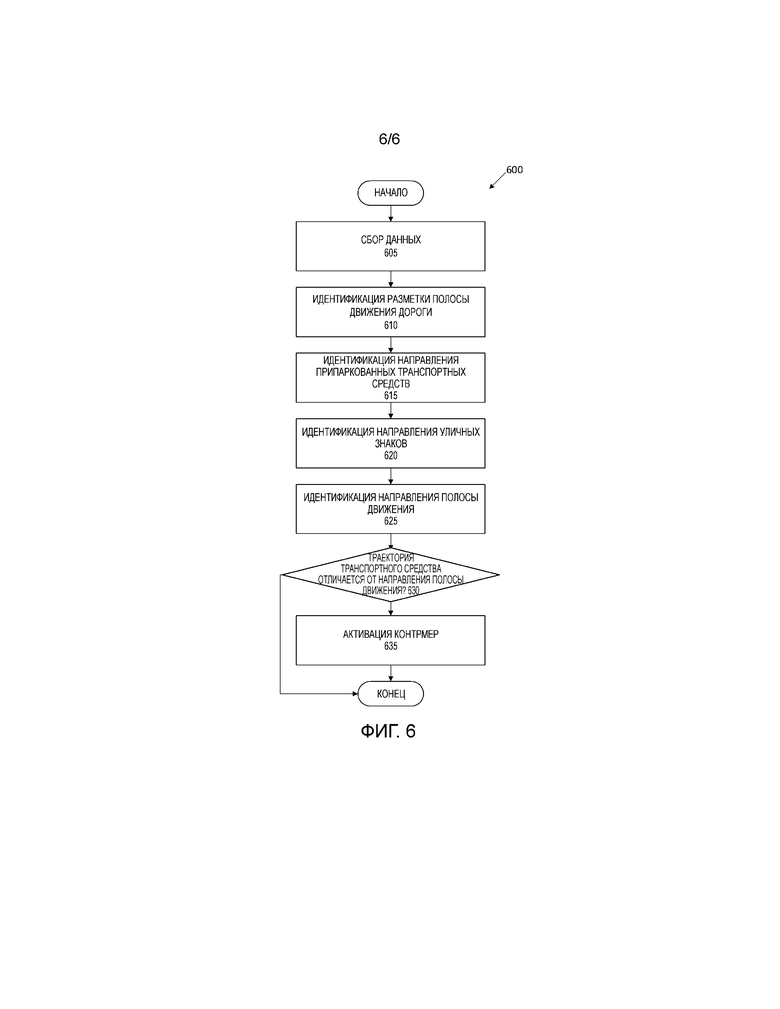
[0007] Фиг. 6 - это блок-схема примерного процесса для идентификации направления полосы движения.
Подробное описание изобретения
[0008] Система включает в себя компьютер, запрограммированный, чтобы идентифицировать направление полосы движения дороги на основе данных датчика транспортного средства, указывающих одно или более из дорожного знака, направления припаркованного транспортного средства и разметки на поверхности полосы движения дороги, чтобы определять, что траектория транспортного средства отличается от направления полосы движения дороги, и затем приводить в действие компонент транспортного средства.
[0009] Компьютер может быть дополнительно запрограммирован, чтобы определять направление припаркованного транспортного средства на основе, по меньшей мере, одного из обращенного назад отличительного признака и обращенного вперед отличительного признака припаркованного транспортного средства.
[0010] Компьютер может быть дополнительно запрограммирован, чтобы определять направление дорожного знака на основе сравнения предварительно определенного изображения дорожного знака и текущего изображения дорожного знака.
[0011] Компьютер может быть дополнительно запрограммирован, чтобы идентифицировать направление полосы движения дороги из направления дорожного знака.
[0012] Компонент транспортного средства может быть аварийной сигнализацией. Компонент транспортного средства может быть тормозом или селектором передач.
[0013] Компонент транспортного средства может быть передатчиком, и компьютер может быть дополнительно запрограммирован, чтобы отправлять сообщение владельцу транспортного средства, указывающее, что траектория транспортного средства отличается от направления полосы движения дороги. Компонент транспортного средства может быть передатчиком, и компьютер может быть дополнительно запрограммирован, чтобы отправлять сообщение, указывающее направление полосы движения другому транспортному средству.
[0014] Компьютер может быть дополнительно запрограммирован, чтобы определять направление припаркованного транспортного средства на основе изображения припаркованного транспортного средства.
[0015] Компьютер может быть дополнительно запрограммирован, чтобы возвращать управление компонентом транспортного средства человеку-водителю при определении, что траектория транспортного средства отличается от направления полосы движения дороги.
[0016] Способ включает в себя идентификацию направления полосы движения дороги на основе данных датчика транспортного средства, указывающих одно или более из дорожного знака, направления припаркованного транспортного средства и разметки на поверхности полосы дороги, и определение того, что траектория транспортного средства отличается от направления полосы движения дороги, и затем приведение в действие компонента транспортного средства.
[0017] Способ может дополнительно включать в себя определение направления припаркованного транспортного средства на основе, по меньшей мере, одного из обращенного назад отличительного признака и обращенного вперед отличительного признака припаркованного транспортного средства.
[0018] Способ может дополнительно включать в себя определение направления дорожного знака на основе сравнения предварительно определенного изображения дорожного знака и текущего изображения дорожного знака.
[0019] Способ может дополнительно включать в себя определение направления полосы движения на основе направления дорожного знака.
[0020] Компонент транспортного средства может быть передатчиком, и способ может дополнительно включать в себя отправку сообщения владельцу транспортного средства, указывающего, что траектория транспортного средства отличается от направления полосы движения дороги. Компонент транспортного средства может быть передатчиком, и способ может дополнительно включать в себя отправку сообщения, указывающего направление полосы движения другому транспортному средству.
[0021] Способ может дополнительно включать в себя определение направления припаркованного транспортного средства на основе изображения припаркованного транспортного средства.
[0022] Способ может дополнительно включать в себя возврат управления компонентом транспортного средства человеку-водителю, когда траектория транспортного средства отличается от направления полосы движения дороги.
[0023] Дополнительно раскрывается вычислительное устройство, запрограммированное, чтобы выполнять любой из вышеописанных этапов способа. Кроме того, дополнительно раскрывается транспортное средство, содержащее компьютер. Кроме того, дополнительно раскрывается компьютерный программный продукт, содержащий компьютерно-читаемый носитель, хранящий инструкции, исполняемые процессором компьютера, чтобы исполнять любой из вышеописанных этапов способа.
[0024] Когда используется в данном документе, "направление полосы движения" является направлением движения транспорта на полосе движения дороги. Т.е., движение в конкретном направлении типично указывается для данной полосы движения дороги. Это конкретное направление является "направлением полосы движения". Например, на двухполосной дороге полосы дороги могут иметь противоположные направления полос движения, предоставляющие возможность движения в двух направлениях по дороге. Когда дорога имеет единственную полосу движения дороги, и направление полосы движения указано, дорога является "односторонней" дорогой.
[0025] Фиг. 1 иллюстрирует систему 100 для эксплуатации транспортного средства 101 на полосе движения дороги. Компьютер 105 в транспортном средстве 101 запрограммирован с возможностью принимать собранные данные 115 из одного или более датчиков 110. Например, данные 115 транспортного средства 101 могут включать в себя местоположение транспортного средства 101, местоположение цели и т.д. Данные местоположения могут иметь известную форму, например, геокоординат, к примеру, координат широты и долготы, полученных через навигационную систему, как известно, которая использует глобальную систему позиционирования (GPS). Дополнительно, примеры данных 115 могут включать в себя показатели измерений систем и компонентов транспортного средства 101, например, скорость транспортного средства 101, траекторию транспортного средства 101 и т.д.
[0026] Компьютер 105, в целом, программируется для связи по сети транспортного средства 101, например, включающей в себя шину связи (например, локальную сеть контроллеров или CAN), которая является известной. Через сеть, шину и/или другие проводные или беспроводные механизмы (например, проводную или беспроводную локальную вычислительную сеть в транспортном средстве 101), компьютер 105 может передавать сообщения различным устройствам в транспортном средстве 101 и/или принимать сообщения от различных устройств, например, контроллеров, актуаторов, датчиков и т.д., включающих в себя датчики 110. Альтернативно или дополнительно, в случаях, когда компьютер 105 фактически содержит множество устройств, сеть транспортного средства может быть использована для связи между устройствами, представленными как компьютер 105 в этом описании. Кроме того, компьютер 105 может быть запрограммирован для связи с сетью 125, которая, как описано ниже, может включать в себя различные проводные и/или беспроводные технологии сетевого взаимодействия, например, сотовые, Bluetooth, проводные и/или беспроводные сети с коммутацией пакетов и т.д.
[0027] Хранилище 106 данных может быть любого известного типа, например, накопителями на жестких дисках, твердотельными накопителями, серверами или любыми энергозависимыми или энергонезависимыми носителями. Хранилище 106 данных может сохранять собранные данные 115, отправленные из датчиков 110.
[0028] Датчики 110 могут включать в себя множество устройств. Например, как известно, различные контроллеры в транспортном средстве 101 могут работать в качестве датчиков 110, чтобы предоставлять данные 115 через сеть или шину транспортного средства 101, например, данные 115, связанные со скоростью, ускорением, позицией транспортного средства, состоянием подсистемы и/или компонентов и т.д. Дополнительно, другие датчики 110 могут включать в себя камеры, детекторы движения и т.д., т.е. датчики 110, чтобы предоставлять данные 115 для оценки местоположения цели, проецирования пути цели, оценки местоположения полосы движения дороги и т.д. Датчики 110 также могут включать в себя радар ближнего действия, радар дальнего действия, лидар и/или ультразвуковые преобразователи.
[0029] Собранные данные 115 могут включать в себя множество данных, собранных в транспортном средстве 101. Примеры собранных данных 115 предоставляются выше, и кроме того, данные 115, в общем, собираются с использованием одного или более датчиков 110 и дополнительно могут включать в себе данные, вычисленные из них, в компьютере 105 и/или на сервере 130. В общем, собранные данные 115 могут включать в себя любые данные, которые могут собираться посредством датчиков 110 и/или вычисляться из таких данных.
[0030] Транспортное средство 101 может включать в себя множество компонентов 120 транспортного средства. При использовании в данном документе, каждый компонент 120 транспортного средства включает в себя один или более аппаратных компонентов, адаптированных с возможностью осуществлять механическую функцию или операцию, такую как движение транспортного средства, замедление или остановка транспортного средства, руление транспортным средством и т.д. Неограничивающие примеры компонентов 120 включают в себя компонент тяги (который включает в себя, например, двигатель внутреннего сгорания и/или электромотор и т.д.), компонент трансмиссии, компонент руления (например, который может включать в себя одно или более из руля, рулевой зубчатой рейки и т.д.), компонент торможения, компонент помощи при парковке, компонент адаптивной системы оптимального регулирования скорости, компонент адаптивного руления и т.п.
[0031] Компьютер 105 может приводить в действие компоненты 120, например, для того, чтобы тормозить и/или замедлять, и/или останавливать транспортное средство 101, чтобы объезжать цели, и т.д. Компьютер 105 может быть запрограммирован с возможностью управлять некоторыми или всеми компонентами 120 с ограниченным вводом или без ввода от человека-водителя, т.е. компьютер 105 может быть запрограммирован с возможностью управлять компонентами 120. Когда компьютер 105 управляет компонентами 120, компьютер 105 может игнорировать ввод от человека-водителя относительно компонентов 120, выбранных для управления посредством компьютера 105, который предоставляет инструкции, например, через шину связи транспортного средства 101 и/или в электронные модули управления (ECU), которые известны для того, чтобы приводить в действие компоненты транспортного средства 101, например, применять тормоза, изменять угол поворота руля и т.д. Например, если человек-водитель пытается поворачивать руль в ходе операции руления, компьютер 105 может игнорировать перемещение руля и рулить транспортным средством 101 согласно программированию.
[0032] Когда компьютер 105 управляет транспортным средством 101, транспортное средство 101 является "автономным" или полуавтономным транспортным средством 101. В целях этого описания выражение "автономное транспортное средство" используется, чтобы ссылаться на транспортное средство 101, работающее в полностью автономном режиме. Полностью автономный режим определяется как режим, в котором каждая из подсистем движения транспортного средства 101 (типично через силовую передачу, включающую в себя электромотор и/или двигатель внутреннего сгорания), торможения и рулевого управления управляется посредством компьютера 105, а не человеком-водителем. Полуавтономный режим представляет собой режим, в котором, по меньшей мере, одно из тяги (типично через силовую передачу, включающую в себя электромотор и/или двигатель внутреннего сгорания), торможения и руления транспортного средства 101 управляется, по меньшей мере, частично посредством компьютера 105, вместо человека-водителя.
[0033] Система 100 дополнительно может включать в себя сеть 125, соединенную с сервером 130 и хранилищем 135 данных. Компьютер 105 дополнительно может быть запрограммирован с возможностью обмениваться данными с одним или более удаленных веб-узлов, к примеру, с сервером 130, через сеть 125, причем такой удаленный веб-узел, возможно, включает в себя хранилище 135 данных. Сеть 125 представляет один или более механизмов, посредством которых компьютер 105 транспортного средства может обмениваться данными с удаленным сервером 130. Соответственно, сеть 125 может представлять собой один или более различных механизмов проводной или беспроводной связи, включающих в себя любую требуемую комбинацию механизмов проводной (например, кабельной и волоконной) и/или беспроводной (например, сотовой, беспроводной, спутниковой, микроволновой и радиочастотной) связи и любую требуемую топологию сети (или топологии, когда используются несколько механизмов связи). Примерные сети связи включают в себя беспроводные сети связи (например, использующие Bluetooth, Bluetooth Low Energy (BLE) IEEE 802.11, связь между транспортными средствами (V2V), такую как выделенная связь ближнего действия (DSRC) и т.д.), локальные вычислительные сети (LAN) и/или глобальные вычислительные сети (WAN), включающие в себя Интернет, предоставляющие услуги передачи данных.
[0034] Компьютер 105 программируется, чтобы идентифицировать направление полосы движения дороги и определять, отличается ли траектория транспортного средства 101 от направления полосы движения дороги, т.е., движется ли транспортное средство 101 по полосе движения дороги в направлении, противоположном, и/или иначе отличающемся, от идентифицированного направления полосы движения дороги. Т.е., траектория транспортного средства 101 "отличается" от направления полосы движения, когда угол, определенный по траектории транспортного средства 101 и направлению полосы движения, превышает предварительно определенное пороговое значение. Например, когда траектория транспортного средства 101 находится более чем на 90 градусов от направления полосы движения, компьютер 105 может определять, что транспортное средство 101 движется против направления полосы движения и может столкнуться с другим транспортным средством 101, движущимся в направлении полосы движения, т.е., траектория транспортного средства 101 отличается от направления полосы движения. Когда траектория транспортного средства 101 отличается от направления полосы движения дороги, компьютер 105 программируется, чтобы активировать одну или более контрмер, чтобы корректировать траекторию транспортного средства 101 и смягчать потенциальные столкновения.
[0035] Компьютер 105 может активировать одну или более контрмер при определении, что транспортное средство 101 движется против направления полосы движения дороги, т.е., транспортное средство 101 движется по неправильному пути на текущей полосе движения дороги. Компьютер 105 может активировать аварийную сигнализацию, указывающую другим транспортным средствам 101, что транспортное средство 101 движется в неправильном направлении.
[0036] Компьютер 105 может отправлять сообщение владельцу транспортного средства 101 через сеть 125, указывающее, что транспортное средство 101 движется в неправильном направлении на полосе движения дороги. Т.е., когда транспортное средство 101 эксплуатируется в автономном режиме, транспортное средство 101 может двигаться без владельца, присутствующего в транспортном средстве 101. Таким образом, владелец может не присутствовать, когда транспортное средство 101 движется в неправильном направлении на полосе движения дороги. Кроме того, транспортное средство 101 может возвращаться в частично автономный или ручной режим, т.е., компьютер 105 может возвращать управление компонентами 120 транспортного средства водителю транспортного средства 101.
[0037] Компьютер 105 может приводить в действие тормоз, чтобы останавливать транспортное средство 101 на полосе движения дороги. После остановки компьютер может перемещать селектор передач в положение заднего хода, чтобы перемещать транспортное средство 101 с текущей полосы движения дороги и/или разворачивать транспортное средство 101 лицевой стороной в правильном направлении. Посредством активации тормоза и перемещения селектора передач в положение заднего хода первое транспортное средство 101 может избегать потенциального столкновения со вторым движущимся навстречу транспортным средством 101; второе транспортное средство может быть или может не быть вторым транспортным средством 101, т.е., может включать или может не включать в себя компьютер 105, хранилище 106 данных, датчики 110, данные 115 и компоненты 120, как описано выше.
[0038] Компьютер 105 в первом транспортном средстве 101 может отправлять сообщение, указывающее направление полосы движения, одному или более другим транспортным средствам, например, второму транспортному средству 101. Т.е., перед идентификацией направления полосы движения от транспортного средства 101, другие автономные транспортные средства 101 могут пытаться двигаться против направления полосы движения по полосе движения дороги. После того как первое транспортное средство 101 идентифицирует направление полосы движения на полосе движения дороги, компьютер 105 может отправлять сообщение через сеть 125 серверу 130 и/или другим транспортным средствам 101, указывающее направление полосы движения, чтобы препятствовать другим автономным транспортным средствам 101 в движении по неправильному пути по полосе движения дороги. Кроме того, компьютер 105 может отправлять сообщение одному или более другим транспортным средствам 101 на полосе движения дороги, указывающее, что транспортное средство 101 движется в неправильном направлении по полосе движения дороги, чтобы смягчать потенциальное столкновение между транспортными средствами 101.
[0039] Фиг. 2 иллюстрирует примерную полосу 200 движения дороги. Полоса 200 движения дороги может включать в себя одну или более разметок 205. Разметки 205 передают информацию о полосе 200 движения дороги пользователям транспортных средств 101. Например, разметки 205 могут указывать, является ли полоса 200 движения дороги выделенной для поворота полосой 205 движения, например, транспортным средствам 101 разрешается выполнять только определенный поворот на перекрестке, когда транспортные средства 101 находятся на полосе 200 движения дороги. В другом примере разметки 205 могут указывать направление движения по полосе 200 движения дороги. Т.е., если полоса 200 движения дороги находится на односторонней улице, разметки 205 могут указывать направление односторонней улицы.
[0040] Компьютер 105 может обнаруживать разметки 205, чтобы определять направление полосы движения для полосы 200 движения дороги. Компьютер 105 может активировать один или более датчиков 110, например, камеру, чтобы собирать данные 115 о разметках 205. Компьютер 105 может, на основе данных 115, определять, указывают ли разметки 205 направление полосы движения. Например, как показано на фиг. 2, разметки 205 показывают стрелку, указывающую направление полосы движения. Таким образом, транспортные средства 101, движущиеся в направлении, указанном стрелкой, движутся в направлении полосы движения. Компьютер 105 может захватывать изображение разметок 205 и определять направление, указанное разметками 205. Например, компьютер 105 может сравнивать изображение с известным изображением стрелки с помощью известных методов обработки изображений, например, преобразования Хафа, описателя Фурье, детектора контуров Кэнни и т.д. Т.е., компьютер 105 сравнивает собранные данные 115 с сохраненными известными формами в хранилище 106 данных и/или на сервере 130, чтобы идентифицировать фрагменты изображений в данных 115 в качестве разметок 205. Компьютер 105 может сравнивать направление, указанное разметками 205, с текущей траекторией транспортного средства 101, чтобы определять, движется ли транспортное средство 101 в том же направлении, что и направление полосы движения. Если направление транспортного средства 101 отличается от направления полосы движения, компьютер 105 может активировать одну или более контрмер, как описано выше.
[0041] Фиг. 3A-3B иллюстрируют компьютер 105, идентифицирующий одно или более припаркованных транспортных средств 210, чтобы определять направление полосы движения. При движении по полосе 200 движения дороги компьютер 105 может активировать один или более датчиков 110, чтобы собирать данные 115, например, визуальные данные от камеры, данные радара от радара, данные лидара от лидара и т.д., и на основе данных 115 компьютер 105 может идентифицировать припаркованные транспортные средства 210. Компьютер 105 может определять направление полосы движения на основе направления, в котором обращены припаркованные транспортные средства 210. Т.е., припаркованные транспортные средства 210 типично обращены лицевой стороной в соответствии с направлением полосы движения для полосы 200 движения дороги. Таким образом, когда компьютер 105 определяет направление обращения лицевой стороны припаркованных транспортных средств 210, компьютер 105 может определять, движется ли транспортное средство 101 в соответствии с направлением полосы движения.
[0042] Компьютер 105 может определять направление, в котором обращены припаркованные транспортные средства 210, на основе данных 115 изображений припаркованных транспортных средств 210. Компьютер 105 может инструктировать камере 110 захватывать изображение одного из припаркованных транспортных средств 210. Компьютер 105 может делить изображение припаркованного транспортного средства 210 на множество многоугольных форм, например, множество прямоугольников, с помощью известных методов обработки изображения, которые аппроксимируют контур припаркованного транспортного средства 210. Т.е., компьютер 105 может ассоциировать одну или более геометрических форм с припаркованным транспортным средством 210. Согласно одному примеру, по меньшей мере, фрагмент каждой из геометрических форм может быть сопоставлен, чтобы перекрывать периферийный контур заднего вида припаркованного транспортного средства 210. Согласно другим примерам, какие-либо отличительные признаки, видимые из смотрящего вперед датчика 110, могут быть сопоставлены; например, оконтуривание всех или фрагмента одного или более задних сигнальных ламп, заднего окна, номерного знака и т.д. Например, передний капот припаркованного транспортного средства 210 может быть отображен как параллелограмм, ветровое окно припаркованного транспортного средства 210 может быть отображено как трапеция, а передний край припаркованного транспортного средства 210 может быть оконтурен как прямоугольник. В другом примере заднее окно припаркованного транспортного средства 210 может быть оконтурено как трапеция, а задний край припаркованного транспортного средства 210 может быть оконтурен как прямоугольник.
[0043] На основе сочетания форм, идентифицированных, чтобы оконтуривать припаркованное транспортное средство 210, компьютер 105 может идентифицировать направление, в котором обращено припаркованное транспортное средство 210. Например, если компьютер 105 идентифицирует параллелограмм между трапецией и прямоугольником, компьютер 105 может определять, что параллелограмм представляет передний капот припаркованного транспортного средства 210, и что припаркованное транспортное средство 210 обращено к транспортному средству 101. Таким образом, направление полосы движения, которое согласуется с передним направлением припаркованного транспортного средства 210, является противоположным направлению движения транспортного средства 101. Альтернативно или дополнительно, компьютер 105 может идентифицировать направление припаркованного транспортного средства 210 на основе числа идентифицированных форм. Например, компьютер 105 может идентифицировать 3 формы и ассоциировать 3 идентифицированные формы с обращенным вперед припаркованным транспортным средством 210, например, 3 формы соответствуют переднему бамперу, переднему капоту и ветровому стеклу припаркованного транспортного средства 210. Когда компьютер 105 идентифицирует только 1 или 2 формы, компьютер 105 может определять, что припаркованное транспортное средство 210 обращено назад, например, 1 или 2 формы соответствуют заднему окну и/или задней крышке багажника.
[0044] В другом примере компьютер 105 может оценивать площади идентифицированных форм и определять направление обращенности припаркованного транспортного средства 210 на основе отношения площадей форм с помощью известных методов. Для типичного транспортного средства 101, 210 формы, идентифицированные для обращенных вперед компонентов, например, капота, ветрового стекла, решетки радиатора и т.д., имеют приблизительно одинаковую площадь. Таким образом, когда отношение площадей двух форм приблизительно равно 1, компьютер 105 может определять, что передний край припаркованного транспортного средства 210 обращен к транспортному средству 101, и, таким образом, транспортное средство 101 движется против направления полосы движения. Кроме того, формы, идентифицированные для обращенных назад компонентов, могут иметь отношение площадей около 2, т.е., задний капот типично имеет площадь, вдвое больше других обращенных назад частей, например, заднего бампера, области под задним бампером и т.д. Таким образом, когда отношение площадей двух форм приблизительно равно 2 (или 1/2), компьютер 105 может определять, что задний край припаркованного транспортного средства 210 обращен к транспортному средству 101, и, таким образом, транспортное средство 101 движется в направления полосы движения.
[0045] Дополнительно, иллюстрированные многоугольные формы и их количество являются примерными. Например, может быть использована единственная геометрическая форма; или может быть использовано больше двух геометрических форм. Неограничивающие примеры подходящих геометрических форм включают в себя прямоугольники, эллипсы, треугольники, трапеции и другие многоугольники. Согласно, по меньшей мере, одному примеру, сопоставление двух или более геометрических форм с припаркованным транспортным средством 210 может обеспечивать избыточность и устранять вычислительную путаницу с информацией, принадлежащей другим окружающим объектам, которые могут быть сопоставлены аналогичным образом.
[0046] Когда используется в данном документе, термин "сопоставление" в контексте сопоставления форм включает в себя выполнение программы в компьютере 105, чтобы ассоциировать одну или более предварительно определенных геометрических форм (например, таких как один или более прямоугольников, эллипсов, треугольников, трапеций или других многоугольников) с одним или более отличительными признаками припаркованного транспортного средства 210 и, в ответ на ассоциацию, затем назначать одну или более предварительно определенных геометрических форм этим фрагментам. Например, компьютер 105 может ассоциировать форму параллелограмма с передним капотом припаркованного транспортного средства 210. Один или более отличительных признаков не требуются, чтобы определять периферийный контур припаркованного транспортного средства 210; однако, по меньшей мере, в одном примере, предварительно определенные геометрические формы могут совокупно перекрывать, по меньшей мере, 25% контура. Геометрические формы могут быть использованы также другими способами. Например, могут быть использованы одна или более геометрических форм, которые полностью окружают или очерчивают периферийный контур припаркованного транспортного средства 210.
[0047] Фиг. 4A-4B иллюстрируют компьютер 105, идентифицирующий одно или более припаркованных транспортных средств 210, чтобы определять направление полосы движения на основе обращенных вперед отличительных признаков 215 и обращенных назад отличительных признаков 220. На основе направления, в котором обращено припаркованное транспортное средство 210, компьютер 105 может захватывать данные 115 изображения либо обращенных вперед отличительных признаков 215 припаркованного транспортного средства 210, как показано на фиг. 4B, либо обращенных назад отличительных признаков 220 припаркованного транспортного средства 210, как показано на фиг. 4A. Когда используется в данном документе, "отличительный признак" припаркованного транспортного средства 210 является компонентом 120 или фрагментом припаркованного транспортного средства 210, видимым при осмотре внешней стороны припаркованного транспортного средства 210. Т.е., припаркованное транспортное средство 210 может иметь идентифицируемые отличительные признаки, которые типично видны на одном из переднего края и заднего края припаркованного транспортного средства 210. Отличительные признаки, которые типично являются видимыми на переднем крае, в данном документе определяются как "обращенные вперед отличительные признаки" 215, а отличительные признаки, которые типично являются видимыми на заднем крае, в данном документе определяются как "обращенные назад отличительные признаки" 220. Примерные обращенные вперед отличительные признаки 215 включают в себя, например, решетку радиатора, створки решетки радиатора, переднее ветровое стекло, противотуманную фару, боковое зеркало и т.д. Примерные обращенные назад отличительные признаки 220 включают в себя, например, номерной знак, выхлопную трубу, крышку багажника, топливный лючок, идентификатор модели, заднее ветровое стекло и т.д.
[0048] Компьютер 105 может идентифицировать обращенные вперед отличительные признаки 215 и обращенные назад отличительные признаки 220 на основе данных 115 изображения припаркованного транспортного средства 210. Т.е., компьютер 105 может сравнивать данные 115 изображения с сохраненным изображением, например, из хранилища 106 данных, сервера 130 и т.д. для известных обращенных вперед отличительных признаков 215 и обращенных назад отличительных признаков 220. С помощью известных методов обработки изображения компьютер 105 может идентифицировать то, включают ли в себя данные 115 изображения один из обращенных вперед отличительных признаков 215 или один из обращенных назад отличительных признаков 220.
[0049] Компьютер 105 может определять направление припаркованного транспортного средства 210 на основе, по меньшей мере, одного из идентифицированного обращенного назад отличительного признака 220 и идентифицированного обращенного вперед отличительного признака 215. Т.е., после сбора данных 115 с камеры 110, компьютер 105 может определять, включает ли в себя изображение обращенный вперед отличительный признак 215 или обращенный назад отличительный признак 220. Если изображение включает в себя обращенный вперед отличительный признак 215, как показано на фиг. 4B, тогда рассматриваемое транспортное средство 101 движется против направления припаркованного транспортного средства 210, и, таким образом, рассматриваемое транспортное средство 101 движется против направления полосы движения. Если изображение включает в себя обращенный назад отличительный признак 220, как показано на фиг. 4A, тогда рассматриваемое транспортное средство 101 движется в том же направлении, в котором обращено припаркованное транспортное средство 210, и, таким образом, рассматриваемое транспортное средство 101 движется в направлении полосы движения.
[0050] В другом примере компьютер 105 может идентифицировать боковое зеркало припаркованного транспортного средства 210 и определять направление припаркованного транспортного средства 210 на основе расстояния между боковым зеркалом и каждым из краев припаркованного транспортного средства 210. С помощью методов обработки изображения, описанных выше, компьютер 105 может идентифицировать боковое зеркало и края припаркованного транспортного средства 210. Компьютер 105 может идентифицировать расстояние между боковым зеркалом и каждым из краев припаркованного транспортного средства 210. Т.е., на основе позиции припаркованного транспортного средства 210 относительно транспортного средства 101, компьютер 105 может оценивать расстояния между боковым зеркалом и каждым из краев припаркованного транспортного средства 210. Компьютер 105 может сравнивать расстояния между боковым зеркалом и краями и определять направление, в котором обращено припаркованное транспортное средство 210. В типичном транспортном средстве 101, 210 боковое зеркало находится ближе к переднему краю, чем к заднему краю, т.е., расстояние между боковым зеркалом и передним краем транспортного средства меньше расстояния между боковым зеркалом и задним краем припаркованного транспортного средства 210. Таким образом, компьютер 105 может сравнивать определенное расстояние между боковым зеркалом и краем припаркованного транспортного средства 210, ближайшим к транспортному средству 101, чтобы определять расстояние между боковым зеркалом и краем припаркованного транспортного средства 210, отдаленным от транспортного средства 101. Если расстояние между боковым зеркалом и краем, ближайшим к транспортному средству 101, больше расстояния между боковым зеркалом и краем, отдаленным от транспортного средства 101, тогда компьютер 105 может определять, что край, ближайший к транспортному средству 101, является задним краем припаркованного транспортного средства 210, и транспортное средство 101 движется в направлении полосы движения. Иначе, компьютер 105 может определять, что край, ближайший к транспортному средству 101, является передним краем припаркованного транспортного средства 210, и, таким образом, транспортное средство 101 движется против направления полосы движения.
[0051] Фиг. 5A-5B иллюстрируют компьютер 105, идентифицирующий направление полосы движения на основе дорожного знака 225. Дорожный знак 225 может включать в себя содержимое, например, фразу, символ и т.д., который указывает информацию о полосе 200 движения дороги. Например, как показано в примере на фиг. 5A-5B, дорожный знак 225 может быть знаком остановки, и содержимое может быть словом "STOP". Дополнительно или альтернативно, дорожный знак 225 может быть, например, знаком "уступи дорогу", знаком "нет поворота на красный", знаком "только поворот" и т.д. и может включать в себя содержимое, чтобы информировать водителей транспортного средства 101 об информации, представленной дорожным знаком 225.
[0052] Дорожный знак 225 может быть расположен так, что водители транспортных средств 101, которые движутся в направлении полосы движения, могут читать содержимое дорожного знака 225 (как показано на фиг. 5A), в то время как водители транспортных средств 101, которые движутся против направления полосы движения, не могут читать содержимое дорожного знака 225 (как показано на фиг. 5B). Таким образом, компьютер 105 может идентифицировать направление полосы движения на основе того, показывают ли данные 115 изображения дорожного знака 225 содержимое дорожного знака 225. Например, компьютер 105 сравнивает предварительно определенные изображения множества дорожных знаков 225, например, в хранилище 106 данных, на сервере 130 и т.д. Компьютер 105 может захватывать данные 115 изображения дорожного знака 225 и сравнивать, с помощью известных методов обработки изображения, текущие данные 115 изображения с предварительно определенными изображениями. Когда сравнение указывает, что текущие данные 115 изображения включают в себя содержимое дорожного знака 225, компьютер 105 может определять, что транспортное средство 101 движется в направлении полосы движения. Когда сравнение указывает, что в текущих данных 115 изображения отсутствует содержимое дорожного знака 225, компьютер 105 может определять, что транспортное средство 101 движется против направления полосы движения.
[0053] Фиг. 6 иллюстрирует примерный процесс 600 для идентификации направления полосы 200 движения дороги. Процесс 600 начинается на этапе 605, на котором компьютер 105 собирает данные 115 от одного или более датчиков 110. Как описано выше, компьютер 105 может собирать, например, визуальные данные 115 с помощью камеры 110, данные 115 лидара с помощью лидара 110 и т.д.
[0054] Далее, на этапе 610, компьютер 105 идентифицирует одну или более разметок 205 на полосе 200 движения дороги из собранных данных 115. Т.е., компьютер 105 может использовать известные методы обработки изображения, чтобы определять, указывают ли данные 115 разметки 205. Разметки 205 могут указывать направление полосы 200 движения дороги и могут включать в себя, например, стрелку, фразу и т.д.
[0055] Далее, на этапе 615, компьютер 105 идентифицирует одно или более припаркованных транспортных средств 210 и идентифицирует направление, в котором обращено каждое припаркованное транспортное средство 210. Как описано выше, компьютер 105 может использовать известные методы обработки изображения, чтобы анализировать данные 115 изображений припаркованных транспортных средств 210 и определять направление, в котором каждое транспортное средство 210 обращено. Например, компьютер 105 может определять число форм, захваченных посредством камеры 110, как описано выше. В другом примере компьютер 105 может идентифицировать один или более передних или задних отличительных признаков 215, 220 припаркованного транспортного средства 210, чтобы определять направление припаркованного транспортного средства 210.
[0056] Далее, на этапе 620, компьютер 105 идентифицирует направление, в котором обращен уличный знак 225. Как описано выше, уличный знак 225 предназначается, чтобы показывать содержимое уличного знака 225, когда рассматривается в направлении полосы движения, и не показывать содержимое, когда рассматривается в противоположном направлении. Таким образом, уличный знак 225 предназначается, чтобы передавать информацию для транспортных средств 101, движущихся в направлении полосы движения. Компьютер 105 может захватывать данные 115 об уличном знаке 225 и, с помощью известных методов обработки изображения, определять, может ли компьютер 105 обнаруживать содержимое уличного знака 225, чтобы определять направление полосы движения.
[0057] Далее, на этапе 625, компьютер 105 идентифицирует направление полосы движения. Т.е., на основе разметок 205, припаркованного автомобиля 210 и дорожного знака 225, компьютер 105 определяет направление полосы движения для полосы 200 движения дороги. Например, когда разметка 205 включает в себя стрелку, указывающую в направлении полосы движения, данные 115 изображения припаркованного транспортного средства 210 включают в себя один или более обращенных назад отличительных признаков 220, и данные 115 изображения дорожного знака 225 включают в себя содержимое дорожного знака 225, компьютер может определять, что направление полосы движения является передним относительно транспортного средства 101.
[0058] Далее, на этапе 630, компьютер 105 определяет, отличается ли траектория транспортного средства 101 от направления полосы движения. Т.е., компьютер 105 определяет, движется ли транспортное средство 101 в направлении полосы движения или от направления полосы движения более чем на пороговое значение, указывающее, что транспортное средство 101 движется в неправильном направлении на полосе 200 движения дороги. Как описано выше, когда траектория транспортного средства 101 находится в переделах порогового значения направления полосы движения, компьютер 105 может определять, что транспортное средство 101 движется с потоком транспорта, т.е., траектория транспортного средства 101 не отличается от направления полосы движения. Когда траектория транспортного средства 101 превышает пороговое значение, компьютер 105 может определять, что транспортное средство 101 движется в направлении полосы движения. Если компьютер 105 определяет, что транспортное средство 101 движется в направлении полосы движения, процесс 600 заканчивается. Если компьютер 105 определяет, что траектория транспортного средства 101 отличается от направления полосы движения, процесс 600 продолжается на этапе 635.
[0059] На этапе 635 компьютер 105 активирует одну или более контрмер. Как описано выше, контрмеры являются конкретными срабатываниями одного или более компонентов 120 транспортного средства, которые смягчают действие транспортного средства 101 против направления полосы движения. Контрмеры могут включать в себя, например, переключение селектора передач в положение заднего хода, применение тормоза, отправку сообщения владельцу транспортного средства 101 через сеть 125 и т.д. После этапа 635, процесс 600 завершается.
[0060] Когда используется в данном документе, наречие "практически", преобразующее прилагательное, означает, что форма, структура, показатель, значение, вычисление и т.д. может отклоняться от точно описанной геометрии, расстояния, показателя, значения, вычисления и т.д. вследствие несовершенств в материалах, механической обработке, производстве, показателя датчика, вычислениях, времени обработки, времени связи и т.д.
[0061] Компьютеры 105, как правило, каждый, включает в себя инструкции, исполняемые одним или более компьютерами, такими как идентифицированные выше, и для выполнения блоков или этапов процессов, описанных выше. Машиноисполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения и отдельно или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем, процессор (например, микропроцессор) принимает инструкции, например, из памяти, машиночитаемого носителя и т.д. и выполняет эти инструкции, за счет этого выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и передаваться с помощью множества компьютерно-читаемых носителей. Файл в компьютере 105, в целом, является совокупностью данных, сохраненных на компьютерно-читаемом носителе, таком как носитель хранения, оперативное запоминающее устройство и т.д.
[0062] Компьютерно-читаемый носитель включает в себя любой носитель, который участвует в предоставлении данных (например, инструкций), который может быть считан посредством компьютера. Такой носитель может принимать множество форм, включающих в себя, но не только, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители включают в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[0063] Что касается носителей, процессов, систем, способов и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Например, в процессе 600, один или более этапов могут пропускаться, или этапы могут выполняться в порядке, отличном от порядка, показанного на фиг. 6. Другими словами, описания систем и/или процессов в данном документе предоставляются в целях иллюстрации конкретных вариантов осуществления и никоим образом не должны истолковываться так, чтобы ограничивать раскрытый предмет изобретения.
[0064] Соответственно, следует понимать, что настоящее раскрытие сущности, включающее в себя вышеприведенное описание и прилагаемые чертежи и нижеприведенную формулу изобретения, имеет намерение быть иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от предоставленных примеров, будут понятны специалистам в области техники по прочтении вышеприведенного описания. Рамки изобретения должны быть определены, не со ссылкой на вышеприведенное описание, а вместо этого должны быть определены со ссылкой на формулу изобретения, приложенную к нему и/или включенную в непредварительную патентную заявку, основанную на данном описании, вместе с полными рамками эквивалентов, к которым такие пункты формулы изобретения приписаны. Ожидается и предполагается, что будущие разработки произойдут в технологиях, обсужденных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. В общем, следует понимать, что раскрытый предмет изобретения допускает модификацию и варьирование.
[0065] Артикль "a", модифицирующий существительное, должен пониматься как означающий одно или более, если не указано иное или контекст не требует иного. Фраза "на основе" охватывает частично или полностью на основе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2014 |
|
RU2654502C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ ОПАСНОГО ВОЖДЕНИЯ И КОМПЬЮТЕР ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2679299C2 |
| ФУНКЦИОНИРОВАНИЕ ПОДНОЖКИ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2733553C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛУЧШЕННОГО ПРЕОДОЛЕНИЯ ИЗГИБОВ | 2015 |
|
RU2711403C2 |
| УЛУЧШЕННОЕ ОПОВЕЩЕНИЕ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2709210C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ПЕРЕДАЧИ ДАННЫХ С ТРАНСПОРТНОГО СРЕДСТВА В ПУНКТ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2015 |
|
RU2709943C2 |
| СИСТЕМА И СПОСОБ УМЕНЬШЕНИЯ ПОСЛЕДСТВИЙ И ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ | 2018 |
|
RU2715601C2 |
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛЬНОГО СОСТОЯНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2678538C2 |
| ИЗБЕГАНИЕ УДАРА В ДНИЩЕ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2707485C2 |
| УЛУЧШЕННОЕ ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ | 2015 |
|
RU2708534C2 |
Группа изобретений относится к системе и способу обнаружения направления полосы движения транспортного средства. Система содержит компьютер, который включает в себя процессор и память. Память содержит инструкции, исполняемые процессором для идентификации направления полосы движения дороги на основе данных датчика транспортного средства, указывающих направление припаркованного транспортного средства на основе комбинации отображенных многоугольных форм, оконтуривающих изображение припаркованного транспортного средства; и определения, что траектория транспортного средства отличается от направления полосы движения дороги, и затем приведения в действие компонента транспортного средства. Достигается предоставление системы, выполненной с возможностью обнаружения направления полосы движения и корректировки траектории движения транспортного средства. 2 н. и 18 з.п. ф-лы, 9 ил.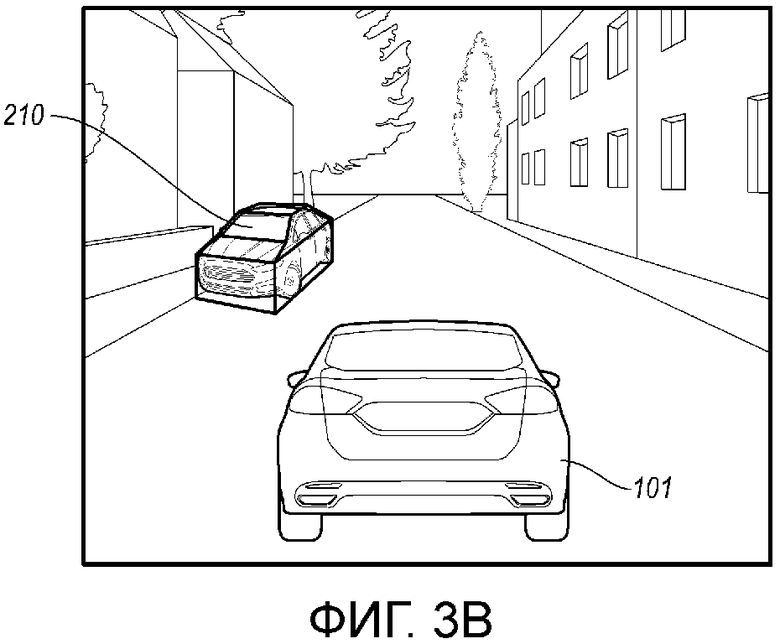
1. Система обнаружения направления полосы движения транспортного средства, содержащая компьютер, включающий в себя процессор и память, причем память содержит инструкции, исполняемые процессором для:
идентификации направления полосы движения дороги на основе данных датчика транспортного средства, указывающих направление припаркованного транспортного средства на основе комбинации отображенных многоугольных форм, оконтуривающих изображение припаркованного транспортного средства; и
определения, что траектория транспортного средства отличается от направления полосы движения дороги, и затем приведения в действие компонента транспортного средства.
2. Система по п.1, в которой инструкции дополнительно содержат инструкции для определения направления припаркованного транспортного средства на основе, по меньшей мере, одного из обращенного назад признака и обращенного вперед признака припаркованного транспортного средства.
3. Система по п.1, в которой данные датчика транспортного средства содержат текущее изображение дорожного знака, и причем компьютер имеет предварительно определенное изображение дорожного знака, сохраненное в памяти, причем инструкции дополнительно содержат инструкции для определения направления дорожного знака на основе сравнения предварительно определенного изображения дорожного знака и текущего изображения дорожного знака.
4. Система по п.1, в которой данные датчика транспортного средства содержат текущее изображение дорожного знака и инструкции дополнительно содержат инструкции для идентификации направления полосы движения дороги из направления дорожного знака.
5. Система по п.1, в которой компонент транспортного средства является аварийной сигнализацией.
6. Система по п.1, в которой компонент транспортного средства является передатчиком, и инструкции дополнительно содержат инструкции для отправки сообщения владельцу транспортного средства, указывающего, что траектория транспортного средства отличается от направления полосы движения дороги.
7. Система по п.1, в которой компонент транспортного средства является тормозом или селектором передач.
8. Система по п.1, в которой компонент транспортного средства является передатчиком, и инструкции дополнительно включают в себя инструкции для отправки сообщения, указывающего направление полосы движения другому транспортному средству.
9. Система по п.1, в которой инструкции дополнительно содержат инструкции для возвращения управления компонентом транспортного средства от компьютера человеку-водителю при определении, что траектория транспортного средства отличается от направления полосы движения дороги.
10. Система по п. 1, в которой инструкции дополнительно содержат инструкции для идентификации направления полосы движения дороги на основе данных датчика транспортного средства, указывающих дорожный знак.
11. Система по п. 1, в которой инструкции дополнительно содержат инструкции для идентификации направления полосы движения дороги на основе данных датчика транспортного средства, указывающих разметку на поверхности полосы движения дороги.
12. Способ обнаружения направления полосы движения транспортного средства, содержащий этапы, на которых:
идентифицируют направление полосы движения дороги на основе данных датчика транспортного средства, указывающих направление припаркованного транспортного средства на основе комбинации отображенных многоугольных форм, оконтуривающих изображение припаркованного транспортного средства; и
определяют, что траектория транспортного средства отличается от направления полосы движения дороги, и затем приводят в действие компонент транспортного средства.
13. Способ по п. 12, дополнительно содержащий этап, на котором определяют направление припаркованного транспортного средства на основе, по меньшей мере, одного из обращенного назад признака и обращенного вперед признака припаркованного транспортного средства.
14. Способ по п. 12, в котором данные датчика транспортного средства содержат текущее изображение дорожного знака, причем компьютер имеет предварительно определенное изображение дорожного знака, сохраненное в памяти, причем способ дополнительно содержит этап, на котором определяют направление дорожного знака на основе сравнения предварительно определенного изображения дорожного знака и текущего изображения дорожного знака.
15. Способ по п. 12, дополнительно содержащий этап, на котором определяют направление полосы движения на основе направления дорожного знака.
16. Способ по п. 12, в котором компонент транспортного средства является аварийной сигнализацией.
17. Способ по п. 12, в котором компонент транспортного средства является передатчиком и способ дополнительно содержит этап, на котором отправляют сообщение владельцу транспортного средства, указывающее, что траектория транспортного средства отличается от направления полосы движения дороги.
18. Способ по п. 12, в котором компонент транспортного средства является тормозом или селектором передач.
19. Способ по п. 12, в котором компонент транспортного средства является передатчиком, и способ дополнительно содержит этап, на котором отправляют сообщение, указывающее направление полосы движения другому транспортному средству.
20. Способ по п. 12, дополнительно содержащий этап, на котором возвращают управление компонентом транспортного средства от компьютера человеку-водителю, когда траектория транспортного средства отличается от направления полосы движения дороги.
| US 20160343253 A1, 24.11.2016 | |||
| US 20140350837 A1, 27.11.2014 | |||
| JP 2003296880 A, 17.10.2003 | |||
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ В НЕПРАВИЛЬНОМ НАПРАВЛЕНИИ | 2015 |
|
RU2682153C2 |

