[0001] По настоящей заявке испрашивается приоритет и преимущество предварительной патентной заявки США № 62/073,603, поданной 31 октября 2014г., по дате подачи которой испрашивается приоритет патентной заявки США № 14/846,051, поданной 04 сентября 2015г., обе из которых включены в настоящее описание посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Данная заявка относится к системам беспроводной связи и, в частности, к форматам сигнализации с варьирующейся полосой пропускания сигнала и к ассоциированной адаптации приемопередатчиков, чтобы экономить потребление энергии в мобильных устройствах и базовых станциях.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0003] Требования в отношении услуг беспроводной передачи данных продолжают экспоненциально расти. По мере того, как растут требования в отношении данных, по-прежнему представляют интерес методики, способные обеспечивать более высокие скорости передачи данных для мобильных устройств. Одним способом обеспечения более высоких скоростей передачи данных является увеличение спектральной полосы пропускания, доступной для систем беспроводной связи.
[0004] Отражением тенденции использования увеличивающейся полосы пропускания являются сети текущих версии стандарта Долгосрочного Развития (LTE) Проекта Партнерства 3-его Поколения (3GPP), которым доступно для связи вплоть до 100 мегагерц (МГц). Более того, существует возможность того, что будущие сети, такие как сети пятого поколения (или 5G), могут использовать несколько сотен МГц или более в попытке отвечать будущим потребностям в отношении услуг передачи данных.
[0005] По мере того, как увеличивается полоса пропускания, строго пропорционально может увеличиваться передача данных, из чего не следует сходное пропорциональное увеличение служебных данных на управление. Таким образом, в будущих системах мультиплексирования с временным разделением (TDM), при котором мультиплексируются каналы управления и данных, может присутствовать сценарий, при котором будет неэффективным применительно к каналам управления занимать такую же полосу пропускания, что и каналы данных. Неэффективности связаны как с тем, что могут быть излишне использованы спектральные ресурсы, которые могут быть лучше использованы для других целей, так и с тем, что мобильные устройства будут отрегулированы на большую чем необходимо полосу пропускания, тем самым растрачивая ресурсы энергии. Таким образом, существует потребность в более эффективном мультиплексировании каналов управления и данных по мере того, как увеличивается доступная полоса пропускания в системах беспроводной связи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] В одном аспекте раскрытия, способ беспроводной связи, включает в себя этапы, на которых: передают сигнал управления к мобильному устройству, используя первую полосу пропускания; и передают сигнал данных к мобильному устройству, используя вторую полосу пропускания более широкую, чем первая полоса пропускания, при этом сигнал управления и сигнал данных передаются на одной несущей частоте.
[0007] В дополнительном аспекте раскрытия, способ беспроводной связи в мобильном устройстве включает в себя этапы, на которых: принимают сигнал управления с первой полосой пропускания; и принимают сигнал данных со второй полосой пропускания более широкой, чем первая полоса пропускания, при этом сигнал управления и сигнал данных принимаются на одной несущей частоте.
[0008] В дополнительном аспекте раскрытия, компьютерный программный продукт для беспроводной связи включает в себя долговременный машиночитаемый носитель информации с записанным на нем программным кодом, при этом программный код включает в себя код для предписания передатчику передавать сигнал управления к устройству, используя первую полосу пропускания. Программный код дополнительно включает в себя код для предписания передатчику передавать сигнал данных к устройству, используя вторую полосу пропускания, более широкую чем первая полоса пропускания, при этом сигнал управления и сигнал данных передаются на одной несущей частоте.
[0009] В дополнительном аспекте раскрытия, компьютерный программный продукт для беспроводной связи включает в себя долговременный машиночитаемый носитель информации с записанным на нем программным кодом, при этом программный код включает в себя код для предписания приемнику принимать сигнал управления с первой полосой пропускания. Программный код дополнительно включает в себя код для предписания приемнику принимать сигнал данных со второй полосой пропускания, более широкой чем первая полоса пропускания, при этом сигнал управления и сигнал данных принимаются на одной несущей частоте.
[0010] В дополнительном аспекте раскрытия, мобильное устройство включает в себя регулируемый радиочастотный (RF) внешний интерфейс, выполненный с возможностью приема сигнала управления с первой полосой пропускания и приема сигнала данных со второй полосой пропускания, более широкой чем первая полоса пропускания, при этом сигнал управления и сигнал данных принимаются на одной несущей частоте.
[0011] В дополнительном аспекте раскрытия, устройство беспроводной связи включает в себя усилитель, аналого-цифровой преобразователь (ADC), аналоговый фильтр, подсоединенный между усилителем и ADC, и процессор управления, соединенный с усилителем, ADC и аналоговым фильтром. Процессор управления выполнен с возможностью, в ответ на прием информации управления из сигнала управления с первой полосой пропускания, устанавливать полосу пропускания усилителя и ADC во вторую полосу пропускания, более широкую чем первая полоса пропускания, и устанавливать частоту дискретизации ADC в соответствии со второй полосой пропускания.
[0012] В дополнительном аспекте раскрытия, устройство беспроводной связи включает в себя процессор управления, выполненный с возможностью соединения с RF внешним интерфейсом, регулировки RF внешнего интерфейса, чтобы принимать сигнал управления с первой полосой пропускания, и регулировки RF внешнего интерфейса, чтобы принимать сигнал данных со второй полосой пропускания, более широкой чем первая полоса пропускания, при этом сигнал управления и сигнал данных принимаются на одной несущей частоте.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] Фиг. 1 иллюстрирует сеть беспроводной связи, в соответствии с разнообразными аспектами настоящего раскрытия.
[0014] Фиг. 2 является высокоуровневой структурной схемой регулируемого приемника в соответствии с разнообразными аспектами настоящего раскрытия.
[0015] Фиг. 3 иллюстрирует формат кадра и соответствующее потребление энергии RF внешнего интерфейса во время в соответствии с разнообразными аспектами настоящего раскрытия.
[0016] Фиг. 4 является блок-схемой, иллюстрирующей примерный способ для приема сигналов управления и данных в соответствии с разнообразными аспектами настоящего раскрытия.
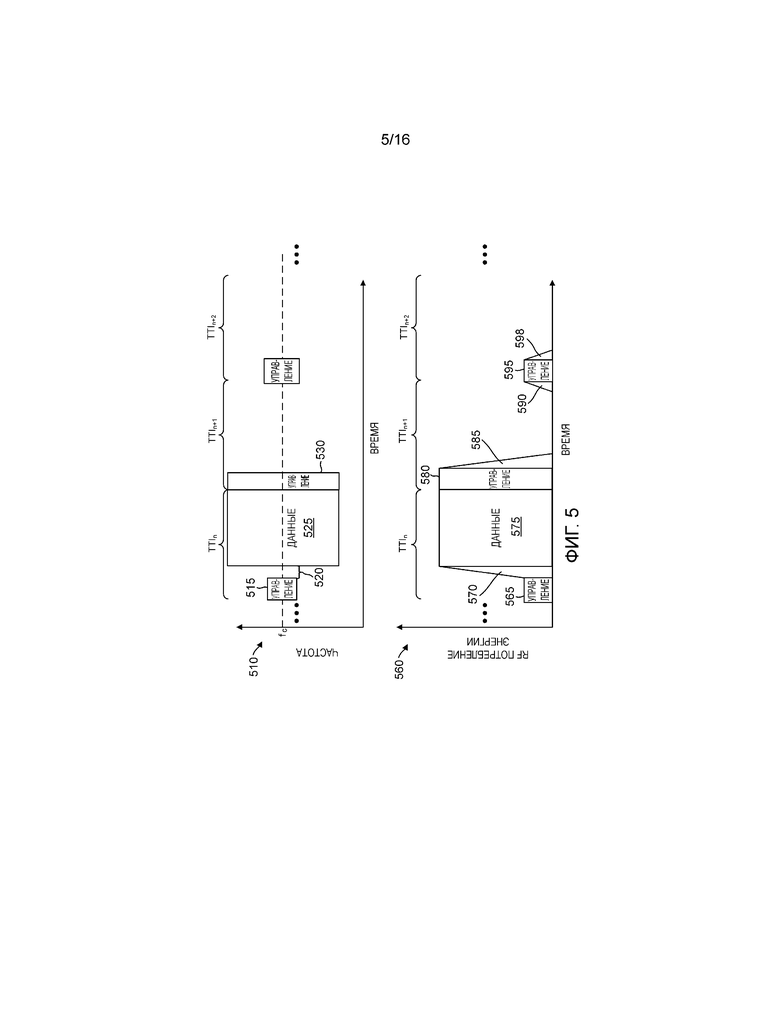
[0017] Фиг. 5 иллюстрирует другой формат кадра и соответствующее потребление энергии RF внешнего интерфейса во время приема иллюстрируемого формата кадра в соответствии с разнообразными аспектами настоящего раскрытия.
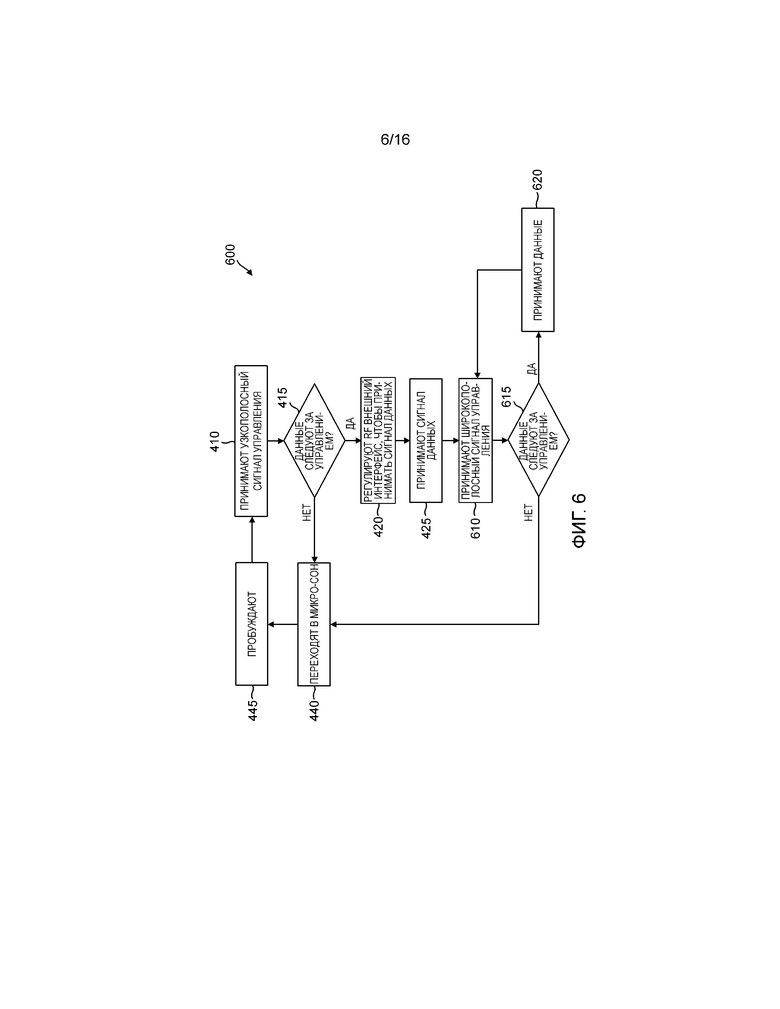
[0018] Фиг. 6 является блок-схемой, иллюстрирующей другой примерный способ для приема сигнала управления и данных в соответствии с разнообразными аспектами настоящего раскрытия.
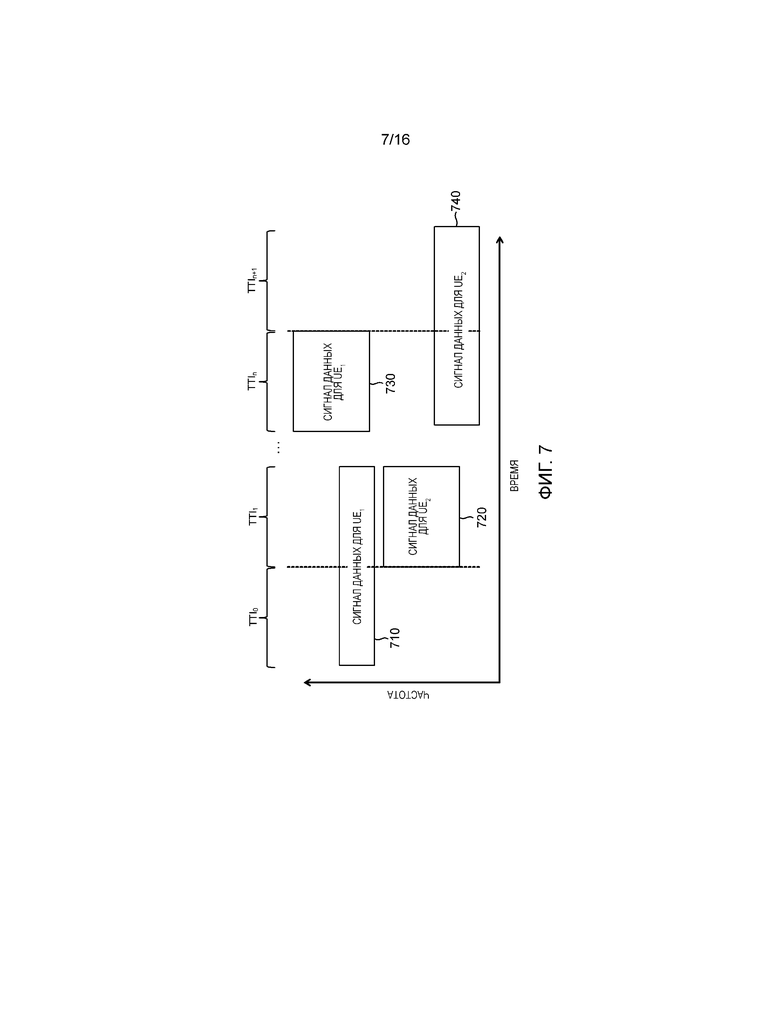
[0019] Фиг. 7 иллюстрирует примерный кадр и структуру сигнала для системы мультиплексирования с частотным разделением (FDM) в соответствии с разнообразными аспектами настоящего раскрытия.
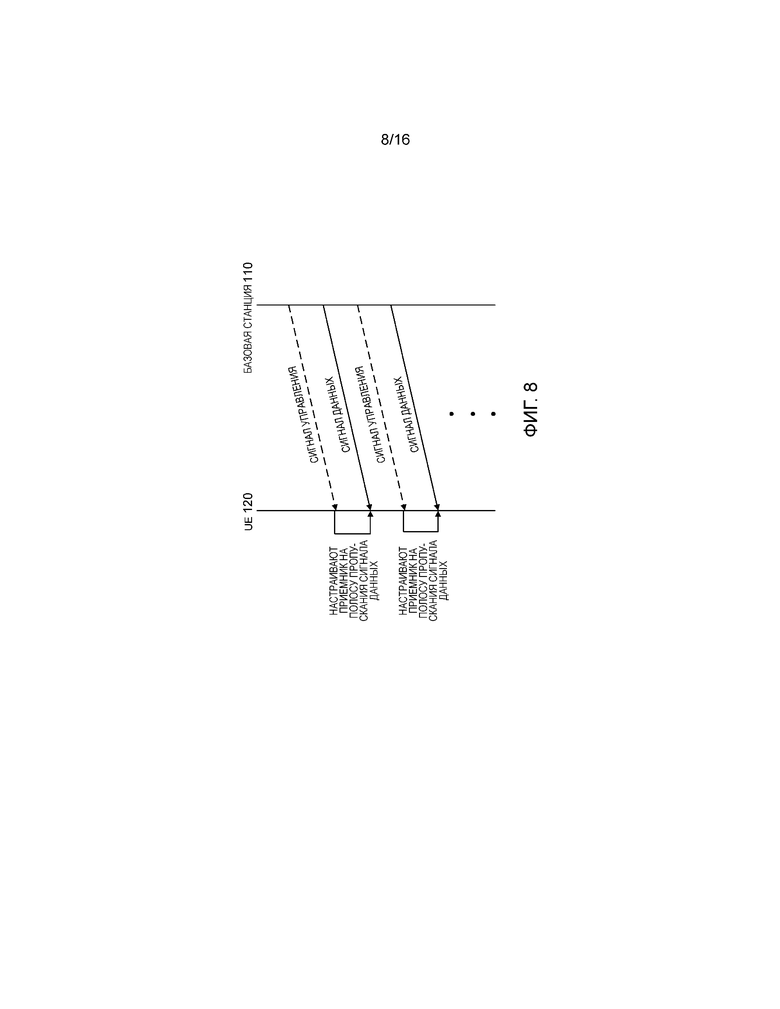
[0020] Фиг. 8 является протокольной схемой, иллюстрирующей передачи между базовой станцией и UE применительно к системе FDM в соответствии с разнообразными аспектами настоящего раскрытия.
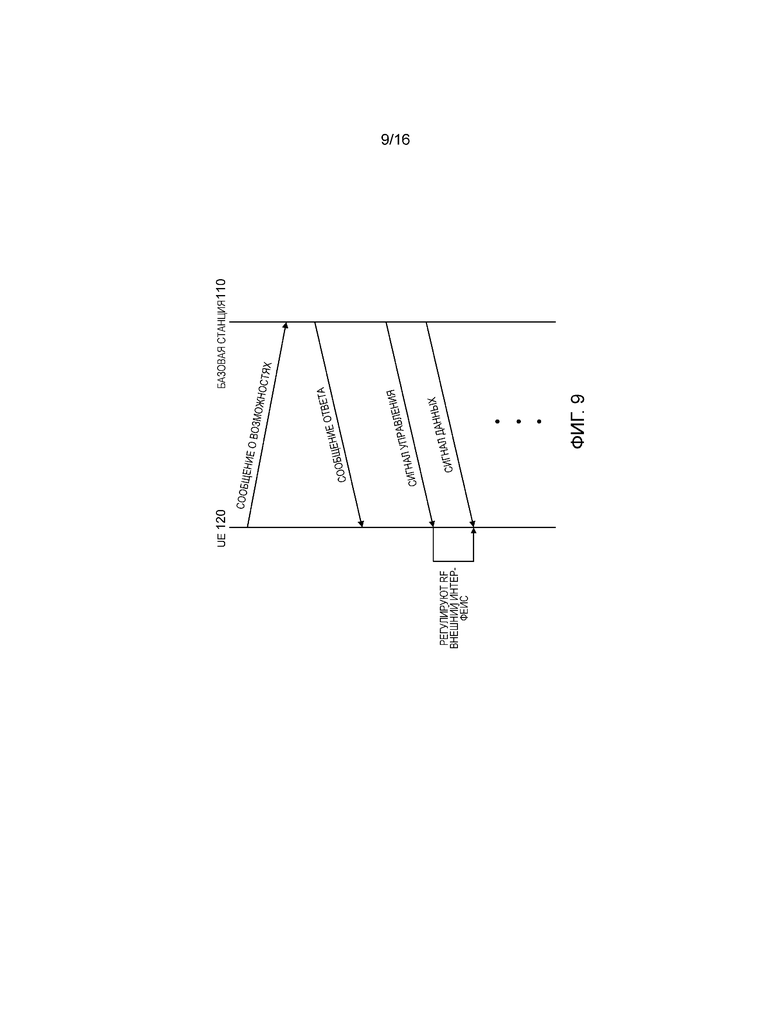
[0021] Фиг. 9 является протокольной схемой, иллюстрирующей аспекты сигнализации между UE и базовой станцией, чтобы поддерживать динамическое переключение полосы пропускания в соответствии с разнообразными аспектами настоящего раскрытия.
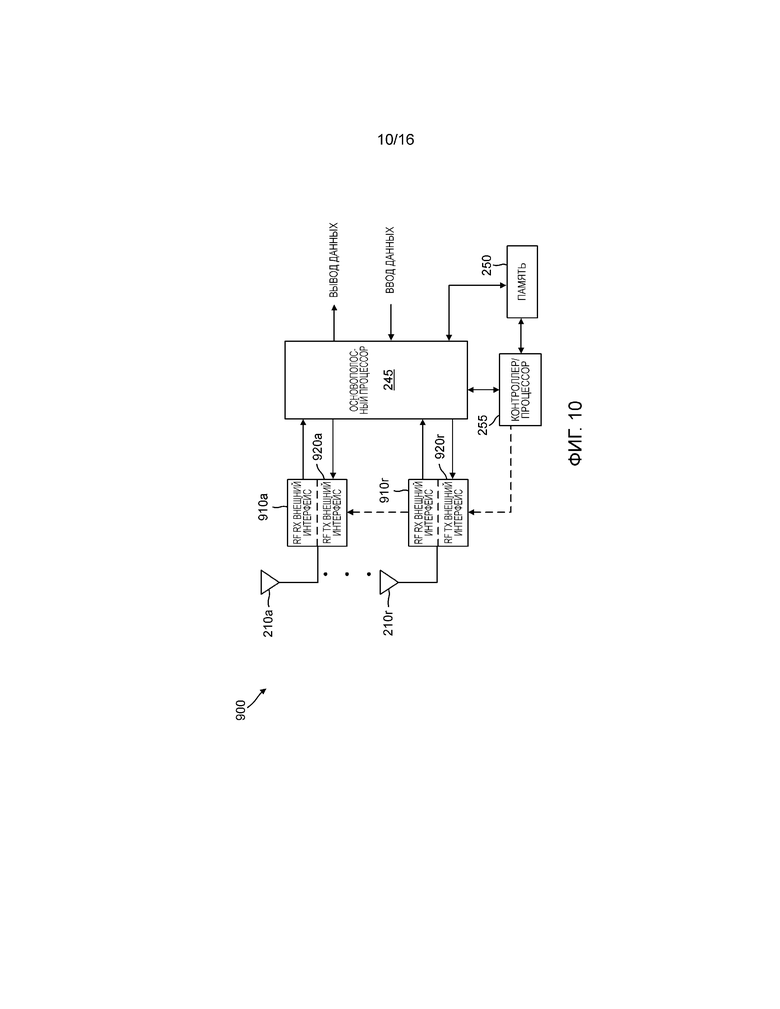
[0022] Фиг. 10 является структурной схемой приемопередатчика в соответствии с разнообразными аспектами настоящего раскрытия.
[0023] Фиг. 11-16 иллюстрируют дополнительные варианты осуществления формата кадра в соответствии с разнообразными аспектами настоящего раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ
[0024] Подробное описание, излагаемое ниже, в связи с прилагаемыми чертежами, предназначено для описания разнообразных конфигураций и не предназначено для того, чтобы представлять только конфигурации, в которых могут быть реализованы на практике описываемые в данном документе концепции. Подробное описание включает в себя конкретные подробности с целью обеспечения исчерпывающего понимания разнообразных концепций. Тем не менее, специалистам в соответствующей области техники будет очевидно, что эти концепции могут быть реализованы на практике без этих конкретных подробностей. В некоторых случаях, общеизвестные структуры и компоненты показаны в форме структурной схемы для того, чтобы избежать затенения таких концепций.
[0025] Методики, описываемые в данном документе, могут быть использованы для разнообразных сетей беспроводной связи, таких как CDMA, TDMA, FDMA, OFMA, SC-FDMA и других сетей. Понятия «сеть» и «система» часто используются взаимозаменяемо. Сеть CDMA может реализовывать технологию радиосвязи, такую как Универсальный Наземный Радиодоступ (UTRA), cdma2000, и т.д. UTRA включает в себя Широкополосный CDMA (WCDMA) и другие варианты CDMA. cdma200 охватывает стандарты IS-2000, IS-95 и IS-856. Сеть TDMA может реализовывать технологию радиосвязи, такую как Глобальная Система Связи с Подвижными объектами (GSM). Сеть OFDMA может реализовывать технологию радиосвязи, такую как Развитый UTRA (E-UTRA), Сверхмобильный Широкополосный Доступ (UMB), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDMA, и т.д. UTRA и E-UTRA являются частью Универсальной Системы Мобильной Связи (UMTS). Долгосрочное Развитие (LTE) 3GPP и Усовершенствованное LTE (LTE-A) являются новыми версиями UMTS, которые используют E-UTRA. UTRA, E-UTRA, UMTS, LTE, LTE-A и GSM описываются в документах организации, именуемой «Проект Партнерства 3-его Поколения» (3GPP). CDMA200 и UMB описываются в документах организации, именуемой «Проект Партнерства 3-его Поколения 2» (3GPP2). Методики, описываемые в данном документе, могут быть использованы применительно к беспроводным сетям и технологиям радиосвязи упомянутым выше, как впрочем и другим беспроводным сетям и технологиям радиосвязи, таким как сеть следующего поколения (например, 5ого Поколения (5G)).
[0026] Данное раскрытие признает, что по мере того, как увеличивается доступная полоса пропускания системы, полоса пропускания, используемая сигналами данных, может быть увеличена (и посредством этого может быть увеличена скорость передачи данных) без соответствующего увеличения сигнализации канала управления. Раскрываются форматы кадра, которые используют узкополосные сигналы управления и широкополосные сигналы данных. Форматы кадра предусматривают регулировку, которая должна быть выполнена в приемниках мобильного устройства, чтобы принимать сигналы управления на одной полосе пропускания и сигналы данных на более широких полосах пропускания. Приемник может использовать маломощный режим, чтобы принимать сигнал управления, и затем увеличивать полосу пропускания и потребление энергии, чтобы принимать сигнал данных. Переходный интервал или период может быть вставлен между сигналом управления и сигналом данных, чтобы предоставить время приемнику для регулировки на разные полосы пропускания сигнала.
[0027] Потребление энергии в приемнике беспроводной связи соотносится с полосой пропускания принятого сигнала. Данное раскрытие относится главным образом к сетям беспроводной связи, которые используют сигналы управления и сигналы данных разных полос пропускания. Приемники в таких сетях предусмотрены, чтобы извлекать пользу из и осуществлять регулировку на разные полосы пропускания, чтобы сокращать потребление энергии. Например, потребление энергии в беспроводных устройствах может быть сокращено из-за того, что сигналы управления занимают меньшую полосу пропускания, чем в обычных системах.
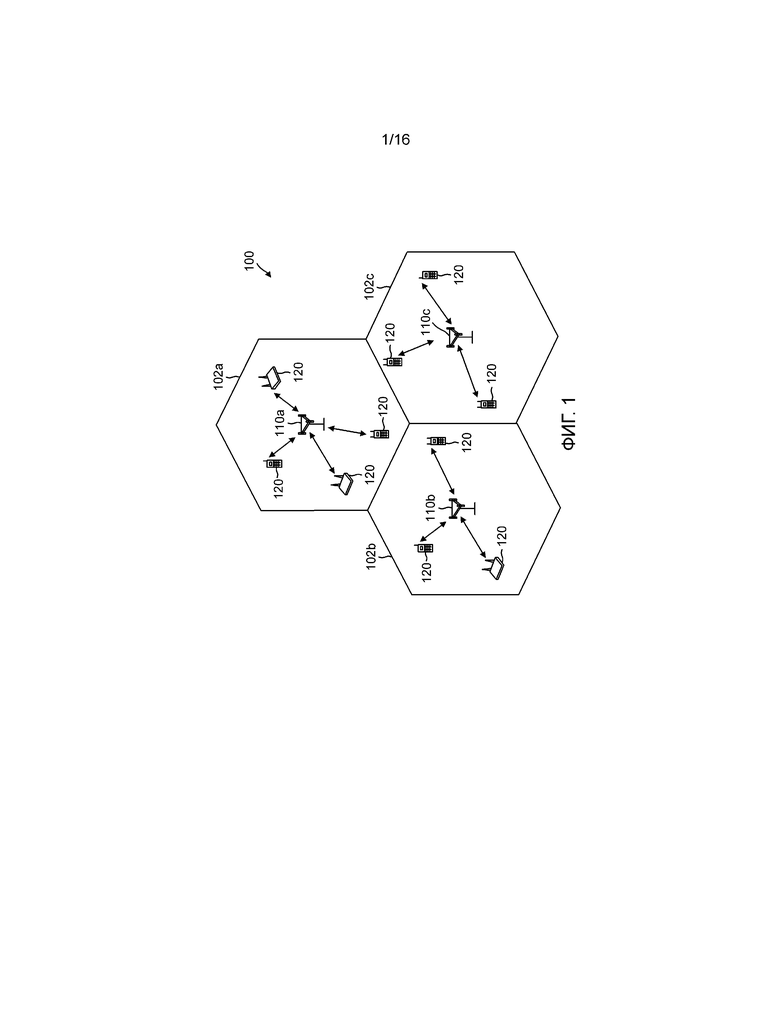
[0028] Фиг. 1 иллюстрирует сеть 100 беспроводной связи, в соответствии с разнообразными аспектами раскрытия. Сеть 100 беспроводной связи может быть сетью LTE или сетью следующего поколения (например, 5G). Беспроводная сеть 100 может включать в себя некоторое количество базовых станций 110. Базовая станция 110 может включать в себя улучшенный Узел-B в контексте LTE. Базовая станция также может именоваться базовой станцией приемопередатчика или точкой доступа.
[0029] Базовые станции 110 осуществляют связь с пользовательскими устройствами 120 (UE), как показано. UE 120 может осуществлять связь с базовой станцией 110 через восходящую линию связи и нисходящую линию связи. Нисходящая линия связи (или прямая линия связи) относится к линии связи от UE 120 к базовой станции 110.
[0030] UE 120 могут быть рассредоточены по всей беспроводной сети 110, и каждое UE 120 может быть стационарным или мобильным. UE также может именоваться терминалом, мобильной станцией, абонентским блоком и т.д. UE 120 может быть сотовым телефоном, интеллектуальным телефоном, персональным цифровым помощником, беспроводным модемом, компьютером класса лэптоп, планшетным компьютером и т.д. Сеть 100 беспроводной связи является одним примером сети, к которой применяются разнообразные аспекты раскрытия. Другими примерами являются WLAN.
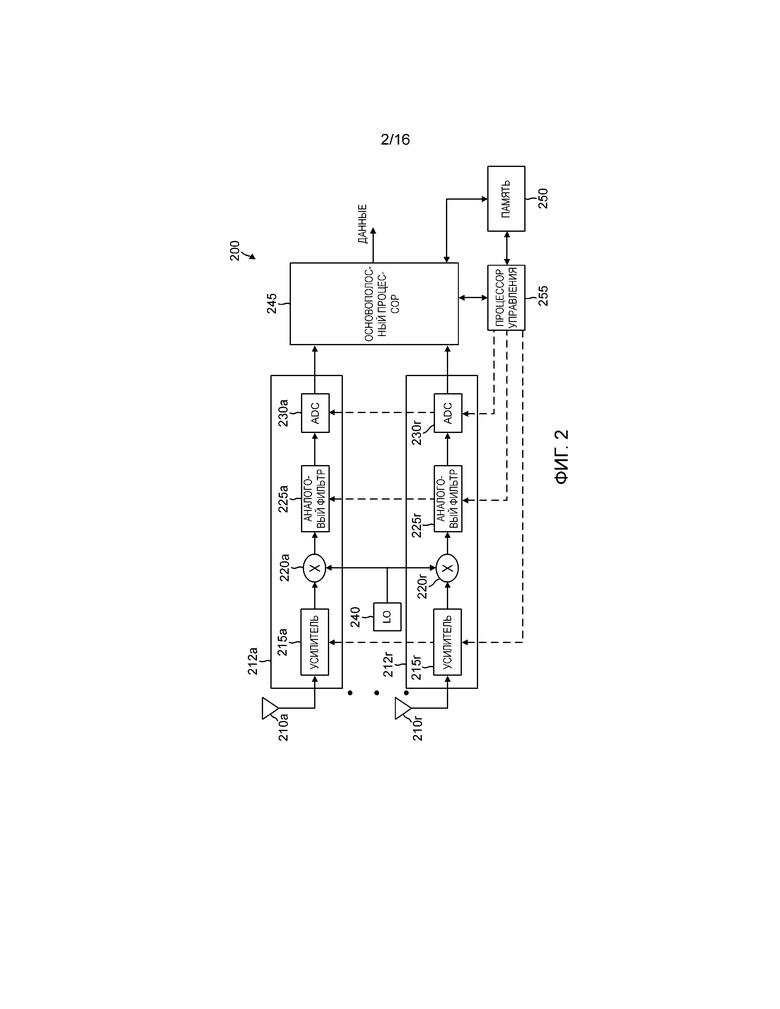
[0031] Фиг. 2 является высокоуровневой структурной схемой регулируемого приемника 200. Регулируемый приемник 200 может быть включен в UE 120. Регулируемый приемник 200 может включать в себя одну или более антенны 210. Если регулируемый приемник 200 включает в себя несколько антенн 210, может быть использована любая методика для связи с множеством входов и множеством выходов (MIMO). Для удобства, описание будет сконцентрировано на одной антенне 210a и ее ассоциированных компонентах с пониманием того, что описание применяется к каждой антенне и ее ассоциированным компонентам.
[0032] В данном примере, регулируемый приемник 200 включает в себя RF внешний интерфейс 212a. В данном примере, RF внешний интерфейс 212a включает в себя усилитель 215a, микшер 220a, аналоговый фильтр 225a, и аналого-цифровой преобразователь 230a (ADC), который находится на связи с антенной 210a, как показано. Регулируемый приемник 200 использует архитектуру нулевой промежуточной частоты (IF), при которой принятый сигнал на антенне 210a усиливается посредством усилителя 215a и затем преобразуется с понижением частоты непосредственно в основную полосу частот посредством микшера 220a в сочетании с гетеродином 240 (LO). Радиочастотный (RF) усилитель, такой как малошумящий усилитель (LNA), является примером усилителя 215a.
[0033] Аналоговый фильтр 225a может быть низкочастотным фильтром с регулируемой полосой пропускания. Принятый сигнал, как правило, является суммой требуемого несущего данные сигнала, помех и шума. В некоторых сценариях, полоса пропускания аналогового фильтра 225a устанавливается, чтобы предотвратить наложение спектров, позволить требуемому сигналу проходить с относительно небольшим искажением к ADC 230a и ослаблять внеполосные помехи и шум.
[0034] ADC 230a принимает аналоговый сигнал на своем входе и осуществляет дискретизацию и преобразование в цифровую форму аналогового сигнала, чтобы создать цифровой выход. Частота дискретизации ADC 230a является достаточной, чтобы предотвратить или в достаточной степени ограничить наложение спектров сигнала и, как правило, является, по меньшей мере, удвоенной наивысшей частотной составляющей входного сигнала. Частота дискретизации ADC 230a может быть регулируемой, чтобы удовлетворять требуемой частоте дискретизации в соответствии с сигналами с разными входными полосами пропускания.
[0035] Регулируемый приемник 250 дополнительно включает в себя основополосный процессор 245. Основополосный процессор 245 принимает сигналы от всех цепей приема и выполняет демодуляцию и декодирование (при необходимости) принятых сигналов.
[0036] Регулируемый приемник дополнительно включает в себя процессор 255 управления. Процессор 255 управления может управлять работой регулируемого приемника 200. Процессор 255 управления генерирует один или более сигналов команды (представленные посредством пунктирных линий), предназначенные для усилителей 215, аналоговых фильтров 225, ADC 230, и/или основополосного процессора 245. Сигналы команды также могут именоваться в данном документе внутренними сигналами управления, чтобы терминология отличалась от сигналов управления восходящей линии связи и нисходящей линии связи, передаваемых через беспроводные каналы.
[0037] Регулируемый приемник 200 дополнительно включает в себя память 250. Память 250 может быть любым электронным компонентом, выполненным с возможностью хранения информации и/или инструкций. Например, память 250 может включать в себя память с произвольным доступом (RAM), постоянную память (ROM), устройства флэш-памяти в RAM, оптические запоминающие носители информации, стираемую программируемую постоянную память (EPROM), регистры, или их сочетания. В варианте осуществления, память 250 включает в себя не временный машиночитаемый носитель информации.
[0038] В памяти 250 могут быть сохранены инструкции или код, которые являются исполняемыми посредством основополосного процессора 245 и/или процессора 255 управления. Понятия «инструкции» и «код» должны интерпретироваться широко, чтобы включать в себя любой тип машиночитаемого оператора(ов). Например, понятия «инструкции» и «код» могут относится к одной или более программам, стандартным программам, подпрограммам, функциям, процедурам, и т.д. «Инструкции» и «код» могут включать в себя один машиночитаемый оператор или много машиночитаемых операторов.
[0039] Процессор 255 управления может быть реализован, используя процессор общего назначения, цифровой сигнальный процессор (DSP), специализированную интегральную микро-схему (ASIC), программируемую вентильную матрицу (FPGA) или другое программируемое логическое устройство, дискретную вентильную или транзисторную логику, дискретные компоненты аппаратного обеспечения, или любое их сочетание, исполненное чтобы выполнять описываемые в данном документе функции. Процессор 255 управления также может быть реализован в качестве сочетания вычислительных устройств, например, сочетания DSP и микропроцессора, множества микропроцессоров, одного или более микропроцессоров совместно с ядром DSP, или любой другой такой конфигурации.
[0040] Усилители 215, аналоговые фильтры 225 и/или ADC 230 могут быть компонентами с регулируемыми параметрами так, что регулируемый приемник 200 способен адаптироваться к приему сигналов разных полос пропускания таким образом, что потребление энергии варьируется в соответствии с полосой пропускания. Потребление энергии, как правило, уменьшается с уменьшением полосы пропускания. Например, усилители 215 и аналоговые фильтры 225 могут иметь полосы пропускания, которые являются регулируемыми, с полосами частот, которые устанавливаются в соответствии с соответствующими сигналами команды. Кроме того, ADC 230 могут иметь регулируемую частоту дискретизации, с частотами дискретизации, которые устанавливаются в соответствии с соответствующим сигналом команды.
[0041] Рассмотрим примерный сценарий, в котором регулируемый приемник 200 ожидает относительно узкополосный сигнал, за которым следует относительно широкополосный сигнал. Перед приемом узкополосного сигнала, процессор 255 управления может устанавливать полосы пропускания усилителей 215 и аналоговых фильтров 255 соответственно, и может устанавливать частоту дискретизации ADC 230 соответственно. После приема узкополосного сигнала, но перед приемом широкополосного сигнала, процессор 255 управления может увеличивать полосы пропускания усилителей 215 и аналоговых фильтров 225, чтобы вмещать более широкую полосу пропускания, и может увеличивать частоту дискретизации ADC, чтобы также вмещать более широкую полосу пропускания. Чем больше полоса пропускания сигнала, который должен быть принят, тем больше энергии требуется, чтобы обработать сигнал.
[0042] Следует понимать, что архитектура нулевой IF на Фиг. 2 является одной из многих архитектур приемника, которые выполнены с возможностью регулировки, чтобы принимать сигналы разных полос пропускания. Много разных архитектур приемника в соответствии с настоящим раскрытием могут использовать усилители, фильтры и ADC в разнообразных сочетаниях, чьи параметры могут быть отрегулированы.
[0043] Данное раскрытие направлено на любой тип схемы модуляции, но мультиплексирование с ортогональным частотным разделением (OFDM) используется в качестве образцовой модуляции. OFDM является гибкой схемой модуляции, которая обеспечивает регулировку полосы пропускания передаваемого сигнала простым способом.
[0044] Модуляция OFDM использует некоторое количество поднесущих. Интервал между поднесущими может быть фиксированным, и суммарное количество используемых поднесущих может меняться в зависимости от полосы пропускания сигнала. Например, интервал между поднесущими может составлять 4кГц, а количество поднесущих может составлять 100, и в этом случае полоса пропускания сигнала составляет приблизительно 400кГц (количество поднесущих умноженное на интервал между поднесущими), без учета каких-либо защитных полос. Таким образом, одним способом масштабирования полосы пропускания, используя OFDM, является масштабирование количества поднесущих. Существуют другие общеизвестные способы масштабирования полосы пропускания OFDM сигналов, такой как масштабирование частотного интервала между поднесущими. OFDM демодулируется, используя быстрое преобразование Фурье (FFT), и размер FFT может варьироваться в соответствии с количеством поднесущих. Таким образом, основополосный процессор 245 может включать в себя, по меньшей мере, одно регулируемое FFT на антенну, чтобы адаптировать демодуляцию к разным полосам пропускания сигнала. Процессор 255 управления может управлять основополосным процессором 245, чтобы указывать размер FFT или другие параметры, чтобы адаптировать основополосный процессор 245 к OFDM сигналам с параметрами, которые варьируются в соответствии с полосой пропускания. После того как OFDM сигнал сформирован, он может быть передан, используя отдельную одну высокочастотную несущую, иногда именуемую RF несущей. Доступные частотно-временные ресурсы могут быть разбиты на блоки ресурсов. Каждый блок ресурсов может охватывать N поднесущих (например, 12 поднесущих) в одной длительности OFDM-символа.
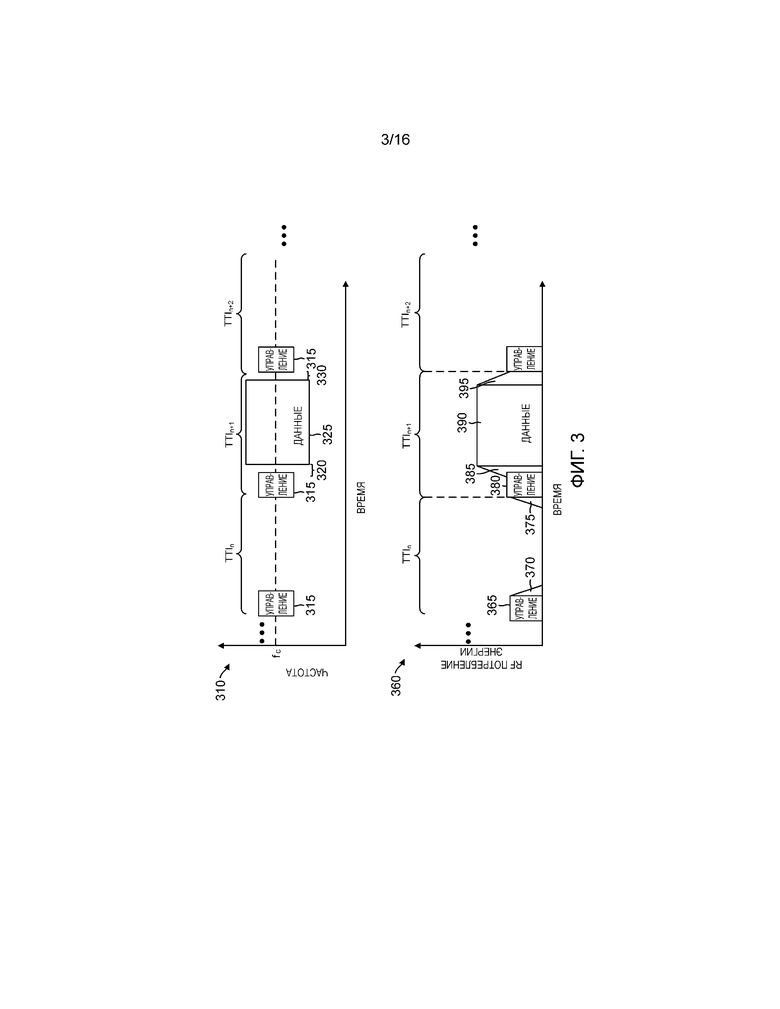
[0045] Работа регулируемого приемника 200 дополнительно описывается со ссылкой на Фиг. 3. Фиг. 3 иллюстрирует формат 310 кадра и соответствующее потребление 360 энергии примерного RF внешнего интерфейса, такого как RF внешний интерфейс 212a, во время приема иллюстрируемого формата кадра. Формат 310 кадра является форматом TDM, в котором время разделено на интервалы времени передачи (TTI). Сигнала управления и сигналы данных являются мультиплексированными с временным разделением в пределах TTI. Фиг. 3 иллюстрирует примерную последовательность переданных сигналов в рамках данного формата 310 кадра.
[0046] TTI может относиться к продолжительности передачи по линии радиосвязи. TTI может быть связан с размером блоков данных, проходящих от более высоких слоев сети к слою линии радиосвязи. В некоторых вариантах осуществления, длительность символов данных, таких как OFDM-символы, является фиксированной, и существует предварительно определенное количество периодов символа данных во время каждого TTI. Например, каждый TTI может быть любым количеством периодов символа, таким как 8, 10, или 12 периодов символа, в качестве примеров.
[0047] В системах беспроводной связи, сигнал управления нисходящей линии связи включает в себя информацию для UE, которая относится к созданию, поддержанию, и окончанию сеанса передачи данных. Например, сигнал управления нисходящей линии связи в TTI может предоставлять информацию к UE касательно того, следуют ли далее в TTI сигнал данных нисходящей линии связи, и, если так, сигнал управления может указывать полосу пропускания сигнала данных.
[0048] Формат 310 кадра разработан с целью сокращения потребления энергии в приемниках UE. Сигнал 315 управления передается в начале каждого TTI. Сигнал управления использует относительно узкую полосу пропускания в сравнении с сигналами данных. Полоса пропускания сигналов управления является достаточной, чтобы переносить информацию управления к предназначенному UE, и ей не обязательно использовать большие полосы пропускания, используемые для сигналов данных для относительно небольшого объема информации управления. В TTI, сигнал управления указывает, существует ли сигнал данных, следующий за сигналом управления. В некоторых вариантах осуществления, полоса пропускания, используемая для сигналов данных, является переменной, и в этом случае сигнал управления также указывает полосу пропускания, используемую для сигнала данных, который следует. В качестве альтернативы, в некоторых вариантах осуществления, сигналы данных всегда занимают определенную полосу пропускания (такую как вся полоса пропускания), и в этом случае полоса пропускания сигнала данных понимается или подразумевается и не требуется, чтобы сигнал управления переносил информацию о полосе пропускания.
[0049] Каждый из передаваемых сигналов передается, используя одну несущую частоту fc. Использование одной несущей упрощает приемники в сравнении с системами, которые используют агрегацию несущих. Агрегация несущих, как правило, требует использования нескольких LO, тогда как схемы сигнализации, описываемые в данном документе, могут использовать только один LO. Тем не менее, подходы, описываемые в настоящем раскрытии, также могут быть применены к нескольким несущим частотам.
[0050] Форматы кадра, раскрываемые в данном документе, такие как формат 310 кадра, могут применяться независимо от количества антенн, используемых в передающем объекте или принимающем объекте. Например, в системе SISO, сигнал передается от передающей антенны и принимается на принимающей антенне. В качестве другого примера, в системе MIMO, иллюстрируемые форматы кадра передаются от, по меньшей мере, одной антенны. Каждая антенна из числа множества антенн может передавать одну и ту же или разную структуру пилот-сигнала. В одном варианте осуществления, иллюстрируемый формат 310 кадра будет приниматься принимающей антенной, и может быть частью составного сигнала, который является суммой сигналов от нескольких антенн.
[0051] В данном примере, в nом TTI (TTIn), сигнал 315 управления указывает назначенному UE, что в TTI не следуют данные. Регулируемый приемник 200 может быть использован, чтобы принимать сигнал 315 управления. После того, как регулируемый приемник 200 принимает сигнал 315 управления в TTIn, компоненты 215, 225, и 230 RF внешнего интерфейса могут быть временно выключены или отключены посредством процессора 255 управления, помещая регулируемый приемник 200 в состояние «микро-сна». Например, переключатель может быть помещен между компонентом, таким как усилитель 215, аналоговый фильтр 225, и/или ADC 230, и его источником питания, при этом переключатель открыт в течение периода времени, чтобы отключать питание компонента. Другим примером «микро-сна» является помещение компонента в незанятое состояние, в котором он принимает сокращенное количество энергии, чтобы работать с уменьшенной производительностью.
[0052] RF потребление 360 энергии RF внешнего интерфейса, такого как RF внешний интерфейс 212a в регулируемом приемнике 200, иллюстрируется на Фиг. 3 во время приема разнообразных сигналов. Например, во время приема сигнала 315 управления в TTIn, потребление энергии представлено посредством обозначения 365. После определения того, что данные отсутствуют, регулируемый приемник 200 переходит в состояние микро-сна, и потребление энергии во время этого перехода представлено посредством обозначения 370. Уменьшение потребления энергии представлено в качестве линейного уменьшений по времени, однако фактическое уменьшение потребления энергии может быть не линейным, а все же уменьшающимся во времени. В течение интервала в TTIn, после перемещения в микро-сон, RF потребление энергии много ниже, чем когда принимается сигнал, поскольку были отключены усилители 215, аналоговые фильтры 225 и ADC 230.
[0053] За короткий промежуток времени до TTIn+1, процессор 255 управления информирует усилители 215, аналоговые фильтры 225 и ADC 230, чтобы они включились перед приемом сигнала 315 управления во время TTIn+1. Потребление энергии во время этого перехода представлено посредством обозначения 375, а потребление энергии во время приема сигнала 315 управления в TTIn+1 представлено посредством обозначения 380. Компонентам в приемнике 200, которые были отключены, требуется период времени, чтобы включиться в достаточной степени для приема сигнала.
[0054] В данном примере, за сигналом 315 управления следует сигнал 325 данных в TTIn+1. Основополосный процессор 245 осуществляет демодуляцию сигнала 315 управления и предоставляет информацию сигнала управления процессору 255 управления. Информация в сигнале 315 управления указывает процессору 255 управления, что последует сигнал данных. В некоторых сценариях, сигнал 325 данных имеет более широкую полосу пропускания, чем сигнал 315 управления. В ответ, процессор 255 управления информирует усилители 215, аналоговые фильтры 225, и ADC 230, чтобы они осуществили регулировку соответствующим образом на более широкую полосу пропускания. Т.е., полосы пропускания усилителей 215 и аналоговых фильтров 225 увеличиваются, и также увеличивается частота дискретизации ADC 230. В некоторых вариантах осуществления, процессор 255 управления также информирует процессор 245 полосы частот основных сигналов, чтобы он адаптировался соответственно к увеличенной полосе пропускания. Например, применительно к демодуляции OFDM сигналов, процессор 255 управления информирует основополосный процессор 245, чтобы он отрегулировал размер FFT или другие параметры соответствующим образом для того, чтобы осуществлять демодуляцию входящего сигнала данных.
[0055] Формат 310 кадра может дополнительно обеспечивать мультиплексирование с частотным разделением (FDM) среди пользователей. Например, сигнал 325 данных полосы B пропускания может быть разбит в частотной области так, что разные фрагменты полосы B пропускания распределены разным пользователям. RF внешний интерфейс 212 для пользователя может быть по-прежнему отрегулирован соответствующим образом для полосы B пропускания с извлечением и демодуляцией требуемого фрагмента, выполняемыми цифровым образом в частотной области, используя методики OFDM.
[0056] В одном варианте осуществления, сигнал 315 управления указывает не только то, что последуют данные, но также указывает полосу пропускания сигнала 325 данных. В данном случае процессор 255 управления определяет полосу пропускания. В других вариантах осуществления, сигнал 325 данных всегда занимает одну и ту же полосу пропускания, такую как полная доступная полоса пропускания, и в этом случае полоса пропускания сигнала данных может пониматься как определенное значение и может отсутствовать потребность включения указания в сигнал управления. Если допускается варьирование полосы пропускания сигналов данных, компоненты регулируемого приемника 200 регулируются от сигнала данных к сигналу данных, чтобы осуществлять прием, используя лишь достаточную полосу пропускания, которая является достаточной, чтобы охватывать полосу пропускания интересующего сигнала данных, вместо того, чтобы всегда настраиваться на прием, используя полную доступную полосу пропускания системы.
[0057] Существует переходный период 320 между каналом 315 управления и сигналом 325 данных, чтобы позволить регулируемому приемнику 200 осуществить регулировку на другую полосу пропускания. Переходный период 320 может именоваться интервалом переключения, так как приемник 200 переключается с одной полосы пропускания на другую. Интервал переключения может быть квантован на целочисленное количество периодов символа, таких как периоды OFDM-символа. Потребление энергии во время данного переходного периода 320 представлено посредством обозначения 385, а потребление энергии во время приема сигнала 325 данных представлено посредством обозначения 390.
[0058] Существует переходный период 330 между сигналом 325 данных и следующим сигналом 315 управления в TTIn+2. Переходный период 330 предоставляет регулируемому приемнику 200 время, чтобы перейти на меньшую полосу пропускания для сигнала 315 управления. Энергия, потребляемая во время переходного периода 330, представлена посредством обозначения 395.
[0059] Некоторые обычные системы TDM, как правило, не включают в себя переходные периоды 320 и 330, чтобы позволить приемнику осуществить регулировку. Одна причина этого состоит в том, что в некоторых обычных системах TDM сигнал управления передается, используя точно такую же полосу пропускания, что и у сигнала данных, так что приемникам не требуется переходить между разными полосами пропускания. Таким образом, энергия, потребляемая во время переходных периодов 320 и 330, представляет собой потери энергии для схемы сигнализации на Фиг. 3 в сравнении с некоторыми обычными системами. Тем не менее, присутствуют солидные экономии энергии во время приема сигнала 315 управления в формате кадра, иллюстрируемом на Фиг. 3. Экономия энергии включает в себя разность в энергии между RF энергией, которая потребляется во время приема сигнала данных, и RF энергией, которая потребляется во время приема сигнала управления. Соответствующие экономии энергии вычисляются как площадь под кривыми энергии. При некоторых условиях, суммарная экономия энергии превышает потери энергии, и в этом случае формат кадра и соответствующий регулируемый приемник 200 увеличивают время работы от батареи в сравнении с обычными системами TDM.
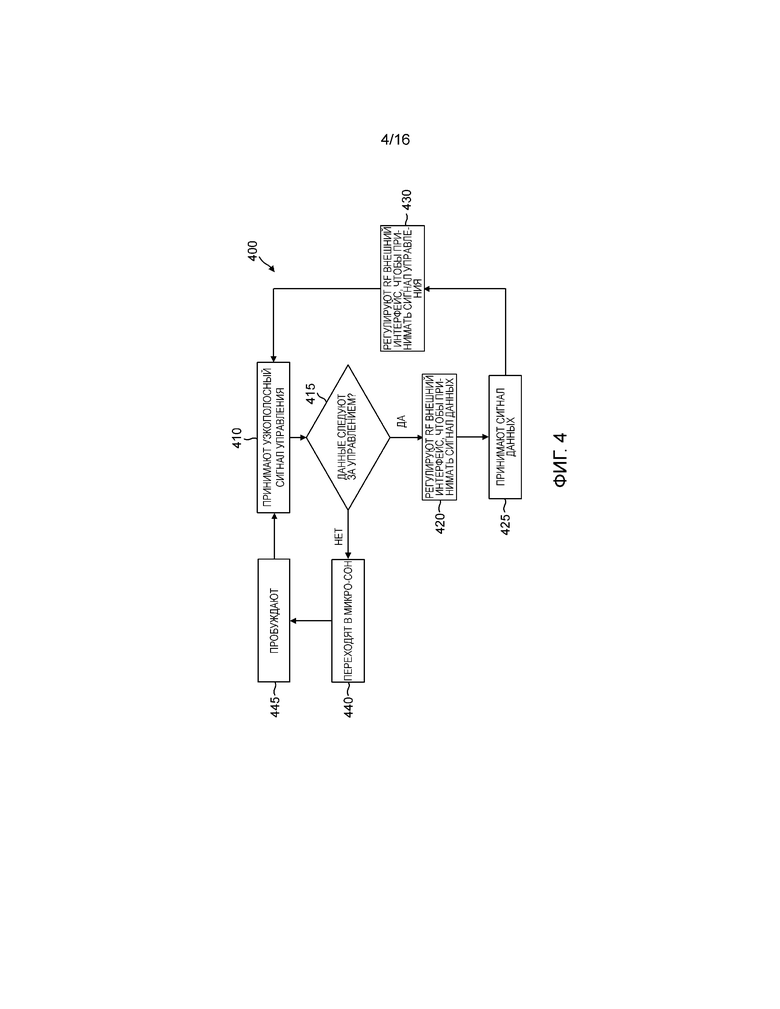
[0060] Фиг. 4 является блок-схемой, иллюстрирующей примерный способ 400 для приема сигналов управления и данных. Способ 400 может быть реализован в регулируемом приемнике 200, и способ 400 описывается со ссылкой на регулируемый приемник 200. Сигналы, которые принимаются в способе 400, передаются посредством базовой станции 110 или другого типа точки доступа. Инструкции или код могут быть сохранены в памяти 250, которые являются исполняемыми посредством процессора 255 управления в регулируемом приемнике 200 с Фиг. 2, чтобы реализовывать способ 400.
[0061] Способ 400 начинается в блоке 410. В блоке 410 узкополосный сигнал управления принимается и обрабатывается посредством регулируемого приемника 200. Сигнал управления именуется узкополосным сигналом управления, так как его полоса пропускания, как правило, ниже, чем у сигналов данных, как иллюстрируется на схеме сигнализации на Фиг. 3. В блоке 415, принимается решение в отношении того, следует ли сигнал данных за сигналом управления в текущем TTI. Сигнал управления будет содержать данную информацию, и осуществляется демодуляция сигнала управления, чтобы извлечь данную информацию.
[0062] Если определяется, что сигнала данных не последует за сигналом управления в текущем TTI, способ переходит к блоку 440, в котором энергия, предоставляемая некоторым компонентам RF внешнего интерфейса, таким как усилители 215, аналоговые фильтры 225, и/или ADC 230, сокращается, чтобы поместить компоненты в состояние микро-сна. Процессор 255 управления может отправлять сигналы к компонентам в приемнике 200, чтобы управлять их статусом, как описано ранее. По прошествии периода времени, в блоке 445 компонентам предписывается включиться или «пробудиться», чтобы подготовиться к приему другого сигнала управления в блоке 410. Приемник 200 может ждать вплоть до непосредственно начала следующего TTI, чтобы запросить пробуждение у компонентов RF внешнего интерфейса.
[0063] Если определяется в блоке 415, что сигнал данных следует за сигналом управления, способ переходит к блоку 420. В блоке 420, RF внешний интерфейс 212a приемника 200 осуществляет регулировку, чтобы принимать сигнал данных. Как описано ранее, сигнал управления может содержать информацию касательно ожидаемой полосы пропускания сигнала данных. В качестве альтернативы, полоса пропускания сигнала данных может быть понятна, как соответствующая некоторому значению. В любом случае, осуществляется регулировка RF внешнего интерфейса. Процессор 255 управления управляет регулировкой. Также может быть отрегулирован основополосный процессор 245.
[0064] Далее в блоке 425 сигнал данных принимается и обрабатывается. После того как сигнал данных принимается в блоке 425, осуществляется регулировка RF внешнего интерфейса, чтобы принимать сигнал управления в блоке 430 и способ возвращается к блоку 410, чтобы начаться заново. Способ 400 продолжается столько, сколько это требуется для сеанса связи. В некоторых вариантах осуществления, сигнал управления передается в начале каждого TTI и нет более сигналов управления, передаваемых внутри каждого TTI. В других вариантах осуществления, по меньшей мере, один дополнительный сигнал управления передается в каждом TTI. Например, может присутствовать сигнал управления в начале TTI и другой сигнал управления в середине TTI.
[0065] Фиг. 5 иллюстрирует другой формат 510 кадра и потребление энергии RF внешнего интерфейса 560 во время приема иллюстрируемого формата кадра. Формат 510 кадра является форматом TDM, в котором время разделено на интервалы времени передачи (TTI) и сигналы управления и сигналы данных являются мультиплексированными с временным разделением. Фигура 5 иллюстрирует передаваемую последовательность сигналов в данном формате 510 кадра.
[0066] Передаваемая последовательность сигналов в формате 510 кадра отличается от формата 310 кадра тем, что если передается сигнал данных, следующий сигнал управления передается используя полосу пропускания как у сигнала данных так, что отсутствует время переключения или интервал переключения для регулировки RF внешнего интерфейса. Поскольку отсутствует потребность в регулировке RF внешнего интерфейса, сигнал данных может быть передан вплоть до границы TTI. Формат сигнализации уступает потенциалу в отношении экономий энергии с помощью более узкополосного сигнала управления, в обмен на возможность исключения времени запаздывания применительно к сигнализации из-за переключения. Таким образом, схема сигнализации использует как узкополосный, так и широкополосный сигналы управления, в зависимости от того, следует ли сигнал управления за сигналом данных.
[0067] Сходства и отличия между схемой сигнализации, иллюстрируемой на Фиг. 5, и схемой сигнализации на Фиг. 3 можно понять со ссылкой на Фиг. 6. Фиг. 6 является блок-схемой, иллюстрирующей примерный способ 600 для приема сигналов управления и данных. На Фиг. 6, блоки 410-425, 440, и 445 являются точно такими же, как соответствующие блоки на Фиг. 4.
[0068] После того, как сигнал данных принимается в блоке 425, способ 600 переходит к блоку 610, в котором принимается широкополосный сигнал управления. Сигнал управления может именоваться широкополосным сигналом управления, так как полоса пропускания является точно такой же, как у ранее принятого сигнала данных, а полоса пропускания сигнала данных, как правило, больше, чем полоса пропускания узкополосного сигнала управления. Сигнал 515 управления в формате 510 кадра на Фиг. 5 является примерным узкополосным сигналом управления, а сигнал 530 управления является примерным широкополосным сигналом управления. За узкополосным сигналом 515 управления следует переходный период 520, чтобы позволить RF внешнему интерфейсу отрегулироваться, чтобы принимать сигнал 525 данных. Не требуется переходного периода между сигналом 525 данных и сигналом 530 управления, так как полосы пропускания являются одинаковыми.
[0069] Как обсуждалось ранее в отношении Фиг. 3, формат 510 кадра может дополнительно обеспечивать FDM среди пользователей. Например, сигнал 525 данных полосы B пропускания может быть разбит в частотной области так, что разные фрагменты полосы B пропускания распределяются разным пользователям. Подобным образом, сигнал 530 управления может быть сходно разбит. RF внешний интерфейс 212 для пользователя может по-прежнему быть соответствующим образом отрегулирован для полосы B пропускания, с извлечением и демодуляцией требуемого фрагмента, выполняемыми цифровым образом в частотной области используя методики OFDM.
[0070] Далее в блоке 615 принятия решения, выполняется определение, следует ли сигнал данных за широкополосным сигналом управления в TTI. Если данные следуют за широкополосным сигналом управления, в одном варианте осуществления, когда данные передаются в точно такой же полосе пропускания, что и сигнал управления, так что отсутствует необходимость в регулировке RF внешнего интерфейса, и сигнал данных принимается в блоке 620. В другом варианте осуществления, данные передаются, главным образом, в полосе B пропускания, которая может быть больше или меньше, чем полоса пропускания сигнала управления, так что может быть переходный период, во время которого осуществляется регулировка RF внешнего интерфейса, чтобы принимать сигнал данных.
[0071] С другой стороны, если отсутствует сигнал данных, следующий за широкополосным сигналом управления, тогда способ 600 переходит к блоку 440. В блоке 440, энергия, подаваемая на некоторые компоненты RF внешнего интерфейса, такие как усилители 215, аналоговые фильтры 225, и/или ADC 230, сокращается, чтобы поместить компоненты в состояние микро-сна. По прошествии периода времени, в блоке 445 компонентам предписывается включиться или «пробудиться», чтобы подготовиться к приему другого сигнала управления в блоке 410. Приемник 200 может ждать вплоть до начала следующего TTI, чтобы запросить пробуждение у компонентов RF внешнего интерфейса. Как часть процесса пробуждения, полоса пропускания и частота(ы) дискретизации RF внешнего интерфейса устанавливаются, чтобы принимать узкополосный сигнал управления. Инструкции или код могут быть сохранены в памяти 250 регулируемого приемника 200, которые являются исполняемыми посредством процессора 255 управления, чтобы реализовывать способ 600.
[0072] Фиг. 7 иллюстрирует примерную структуру кадра и сигнала для системы FDM. Несущая частота для данных, предназначенных заданному UE, не является фиксированной и может варьироваться. В схеме FDM, суммарная полоса пропускания системы может быть разделена на множество полос частот так, что сигналы данных для разных UE могут быть переданы одновременно в разных полосах частот. Например, сигнал данных для UE1 710 и сигнал данных для UE2 720 перекрываются во времени в течении TTI1, но не перекрываются по частоте. Несущий сигнал в центральной частоте каждого из сигналов данных, иллюстрируемых на Фиг. 7, используется чтобы передавать разнообразные сигналы данных.
[0073] Полоса пропускания, распределенная для сигналов данных для заданного UE, может варьироваться во времени, как иллюстрируется посредством сравнения сигналов 710 и 730 данных, адресованных UE1, например. Базовая станция может принимать решение в отношении изменения полосы пропускания для конкретного UE из-за вариаций объема данных, доступных для передачи в зависимости от времени, например.
[0074] Некоторые обычные схемы FDM передают сигналы OFDM, используя полную доступную полосу пропускания для передач нисходящей линии связи, с разными группами поднесущих внутри полного сигнала, распределенного разным UE. Как следствие, каждое UE, как правило, обрабатывает всю полосу пропускания, чтобы извлечь группу(ы) поднесущих, распределенных UE. В сравнение, когда допускается варьирование RF несущей частоты от передачи к передаче, каждое UE уведомляется о том, какая RF несущая используется для его сигналов. Тем не менее, преимущество подхода с несколькими RF несущими состоит в том, что полоса пропускания может быть использована более эффективно, ели допускается, чтобы сигналы данных использовали разные RF несущие так, что каждая UE не должна обрабатывать всю полосу пропускания и может использовать RF несущую отданную ему.
[0075] Фиг. 8 является протокольной схемой, иллюстрирующей аспекты сигнализации между UE 120 и базовой станцией 110, чтобы поддерживать FDM с переменными полосами пропускания. В данном примере, сигналы управления передаются через канал отличный от сигналов данных. Канал управления может находиться в другой полосе частот или в другом слоте времени, в качестве примера. Сигнал управления указывает центральную частоту (если центральная частота является динамической) и полосу пропускания ассоциированного сигнала данных. Сигнал данных затем отправляется, используя назначенную полосу пропускания и центральную частоту. В интервал времени между сигналом управления и сигналом данных, приемник UE 120 настраивается на полосу пропускания сигнала данных. Данный процесс повторяется при условии, что присутствуют данные для переноса между базовой станцией 110 и UE 120.
[0076] Базовая станция 110 может координировать данный процесс по разным UE 120, чтобы эффективно использовать доступную спектральную полосу пропускания. Один пример данного скоординированного процесса был описан в отношении Фиг. 7.
[0077] Фиг. 9 является протокольной схемой, иллюстрирующей аспекты сигнализации между UE 120 и базовой станцией 110, чтобы поддерживать сигнализацию переменной полосы пропускания. Сначала, UE 120 передает сообщение о возможностях базовой станции 110. Сообщение о возможностях может предоставлять одно или более указаний, соответствующих количеству параметров и возможностям UE 110. Сообщение о возможностях может включать в себя указание того, способно ли UE 110 динамически переключаться между сигналами с разными полосами пропускания. Сообщение о возможностях может дополнительно включать в себя указание задержки переключения для UE 120 так, что базовая станция 110 может отвечать посредством вставки или резервирования интервала времени между сигналами управления и данных, чтобы позволить UE 120 отрегулировать свой RF внешний интерфейс. Интервал времени вмещает задержку переключения, указанную посредством UE.
[0078] Далее, базовая станция 110 передает сообщение ответа в ответ на сообщение о возможностях. Сообщение ответа может предоставлять одно или более указаний, соответствующих количеству параметров или возможностей. Например, сообщение ответа может указывать, что активируется динамическое переключение полосы пропускания. Динамическое переключение полосы пропускания может быть активировано или деактивировано так часто, как это требуется во время соединения. Таким образом, сообщения, указывающие на то, что динамическое переключение полосы пропускания активируется или деактивируется, могут быть переданы посредством базовой станции 110 так часто, как это требуется.
[0079] Сообщение ответа также может указывать смещение времени между сигналом управления и соответствующим сигналом данных в TTI. Смещение времени может быть основано на задержке переключения, указываемой в сообщении о возможностях. Смещение времени должно вмещать задержку, требуемую, чтобы декодировать сигнал управления, и позволять RF внешнему интерфейсу переключать полосы пропускания. Сообщение ответа также может указывать, сохраняется ли полоса пропускания на широкой полосе пропускания сигнала данных для следующего сигнала управления, как иллюстрируется на Фиг. 5, или возвращается к узкой полосе пропускания, как иллюстрируется на Фиг. 3. В качестве альтернативы, предыдущий сигнал управления также может указывать, сохраняется ли полоса пропускания на широкой полосе пропускания сигнала данных для следующего сигнала управления, как иллюстрируется на Фиг. 5, или возвращается к узкой полосе пропускания, как иллюстрируется на Фиг. 3.
[0080] В качестве альтернативы, базовая станция 110 может принимать решение не активировать динамическое переключение полосы пропускания. Если динамическое переключение полосы пропускания не активируется, сигналы управления занимают точно такую же полосу пропускания как сигналы данных и отсутствует смещение времени между сигналами управления и сигналами данных.
[0081] После того, как был осуществлен обмен сообщением о возможностях и сообщением ответа, передача информации управления и данных может происходить при необходимости. В примере, показанном на Фиг. 9, сигнал управления передается посредством базовой станции 120 и принимается посредством UE 110. Далее, UE 110 регулирует свой RF внешний интерфейс, и затем сигнал данных передается посредством базовой станции 120 и принимается посредством UE 110.
[0082] Фиг. 10 является структурной схемой приемопередатчика 900, который реализует аспекты данного раскрытия. Приемопередатчик 900 содержит антенны 210, основополосный процессор 245, память 250, и контроллер/процессор 255, как описано ранее. Приемопередатчик дополнительно включает в себя RF принимающие (Rx) внешние интерфейсы 910. Каждый RF Rx внешний интерфейс 910 может включать в себя усилитель, аналоговый фильтр, и ADC, как описано в отношении Фиг. 2. Другие архитектуры RF Rx внешнего интерфейса являются совместимыми с данным раскрытием. Например, некоторые архитектуры RF Rx внешнего интерфейса выполняют большую часть обработки в аналоговой области, а некоторые архитектуры RF Rx внешнего интерфейса выполняют большую часть обработки в цифровой области. Кроме того, архитектуры RF Rx внешнего интерфейса выполняют большую часть обработки в промежуточной частоте (IF), вместо основной полосы частот (baseband). Эти RF Rx внешние интерфейсы могут быть выполнены регулируемыми, чтобы учитывать отличия в полосах пропускания сигнала управления и сигнала данных.
[0083] Приемопередатчик дополнительно включает в себя RF передающие (Tx) внешние интерфейсы 920. Каждый RF Tx внешний интерфейс 920 осуществляет принятие потока цифровых символов данных от основополосного процессора и преобразует цифровые символы данных в аналоговый сигнал для передачи через соответствующую антенну 210.
[0084] Приемопередатчик 900 пригоден либо для базовой станции, либо для UE 120. Когда приемопередатчик 900 находится в режиме передачи, задействованы RF Tx внешние интерфейсы 920, и контроллер/процессор 255 управляет RF Tx внешними интерфейсами 920, как впрочем и основополосным процессором 245, чтобы генерировать сигналы разных полос пропускания. Сочетание RF Tx внешнего интерфейса 920 и основополосного процессора 245 является примером передатчика. Сочетание RF Rx внешнего интерфейса 910 и основополосного процессора 245 является примером приемника. RF Rx внешний интерфейс 910 может содержать RF внешний интерфейс 212, описанный ранее.
[0085] В дополнение к возможностям, описанным ранее применительно к демодуляции OFDM-символов, основополосный процессор 245 может дополнительно быть выполнен с возможностью модуляции OFDM-символов. Модуляция OFDM-символов является общеизвестной в области техники и в некоторых вариантах осуществления выполняется обратное FFT (IFFT), чтобы преобразовать данные частотной области во временную область. Как описано ранее, существуют разнообразные методики для смены полос пропускания OFDM сигналов. Одна методика включает изменение количества поднесущих, используемых для генерирования OFDM сигналов.
[0086] Информация и сигналы могут быть представлены, используя любую из многообразия разных технологий и методик. Например, данные, инструкции, команды, информация, сигналы, биты, символы, и импульсы, на которые могли ссылаться на всем протяжении вышеприведенного описания, могут быть представлены посредством напряжений, токов, электромагнитных волн, магнитных полей или частиц, оптических полей или частиц, или любого их сочетания.
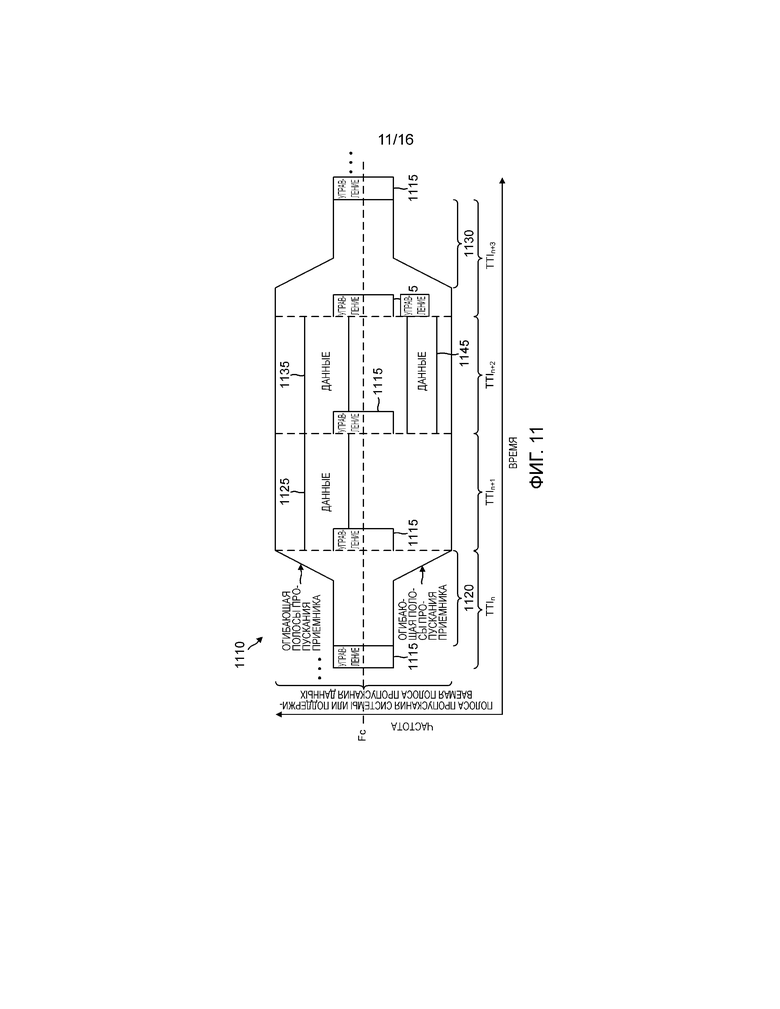
[0087] Фиг. 11 иллюстрирует другой формат 1110 кадра. Формат кадра является форматом TDM, в котором время разделено на TTI и сигналы управления и сигналы данных являются мультиплексированными по времени. Фиг. 11 иллюстрирует последовательность переданных сигналов в данном формате 1110 кадра.
[0088] Сигналы 1115 управления являются узкополосными сигналами управления. В варианте осуществления, базовая станция допускает одну полную продолжительность TTI для задержки переключения полосы пропускания приемника. Существует, по меньшей мере, две опции для сигнализации, использующей сигналы 1115 управления. В первой опции, сигнал 1115 управления в TTIn имеет индикатор переключателя полосы пропускания, чтобы инициировать расширение полосы пропускания RF внешнего интерфейса, чтобы принимать данные более широкой полосы пропускания в TTIn+1. Во второй опции, распределение 1125 блока радиосвязи данных в TTIn+1 распределяется или предварительно планируется, используя сигнал 1115 управления в TTIn. Как только широкая полоса пропускания внешнего интерфейса радиосвязи установлена для TTIn+1, планирование может возвращаться к нормальному (т.е., отсутствует предварительное планирование) для последующих TTI. Например, сигнал 1115 управления в TTIn+2 указывает использование ресурсов 1135 и 1145 данных в TTIn+2.
[0089] Преимущество первой опции состоит в том, что планировщику в базовой станции требуется лишь знать, что UE будет запланировано в следующем TTI, чтобы установить индикатор. Планировщику базовой станции не требуется выполнять предварительное планирование и избегают соответствующего увеличения комплексности. Преимущество второй опции состоит в том, что присутствует экономия ресурса канала управления в том, что отсутствует индикатор переключателя полосы пропускания.
[0090] На Фиг. 11 указывается огибающая полосы пропускания приемника. Огибающая полосы пропускания приемника представляет диапазон частот по отношению ко времени, используемому приемником, таким как регулируемый приемник 200, в интересующем формате кадра. Во время переходного периода 1120 полоса пропускания приемника может переходить из относительно узкой полосы пропускания для приема сигнала 1115 управления в относительно широкую полосу пропускания (в данном варианте осуществления, полная полоса пропускания системы или полная полоса пропускания, доступная для данных) для приема данных. Подобным образом, во время переходного периода 1130 полоса пропускания приемника может переходить из относительно широкой полосы пропускания в относительно узкую полосу пропускания, как показано.
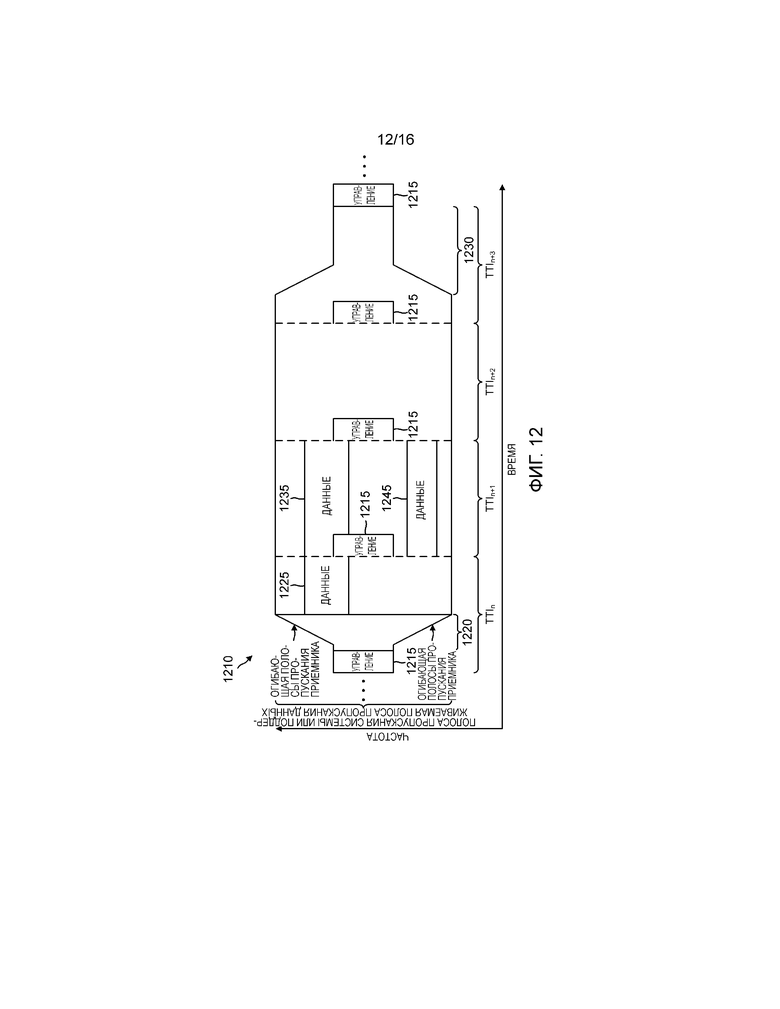
[0091] Фиг. 12 иллюстрирует другой формат 1210 кадра. В данном формате кадра сигнал данных может быть распределен только для последней порции или фрагмента TTI так, что существует достаточно времени для того, чтобы полоса пропускания приемника перешла из узкой полосы пропускания для приема сигнала управления в более широкую полосу пропускания для приема сигнала данных. Например, в TTIn сигнал 1215 управления может указывать на то, что позже в TTI будет сигнал 1225 данных. Таким образом, меньшая продолжительность TTI, чем пример на Фиг. 11, может быть доступна для переключения полосы пропускания приемника. Во время переходного периода 1220 полоса пропускания приемника увеличивается. Одно такое примерное увеличение приемника иллюстрируется посредством огибающей полосы пропускания приемника на Фиг. 12.
[0092] Как только приемник перешел к более широкой полосе пропускания в TTIn, распределение данных может распространяться на весь TTI, включая опцию, чтобы мультиплексировать с каналом управления по частоте. Например, сигнал 1215 управления в TTIn+1 может указывать полосы пропускания сигналов 1235 и 1245 данных. Сигналы управления, которые передаются после того, как приемник перешел на более высокую полосу пропускания, могут именоваться широкополосными сигналами управления, и в некоторых вариантах осуществления широкополосный сигнал управления относится к сигналу управления и одному или более сигналам данных, которые передаются одновременно в разных полосах частот (т.е., мультиплексированы с частотным разделением). Примером широкополосного сигнала управления является сигнал 1215 управления в TTIn+1 на Фиг. 12. В некоторых вариантах осуществления, в течение интервала времени, в котором передается широкополосный сигнал управления, передаваемый сигнал включает в себя фрагмент сигнала управления и фрагмент сигнала данных.
[0093] Фиг. 12 также иллюстрирует механизм обратного отсчета для возврата приемника к узкой полосе для приема сигналов управления. В TTIn+2, сигнал 1215 управления указывает на то, что отсутствуют данные внутри TTIn+2. Таким образом, TTIn+2 является кандидатом на возврат полосы пропускания приемника к узкой полосе пропускания, используя механизм описанный ранее - например в отношении Фиг. 2. Тем не менее, вместо того, чтобы заставлять приемник часто переходить между полосами пропускания, используется механизм обратного отсчета. В первом TTI, в котором отсутствуют данные для передачи, счетчик устанавливается в максимальное значение, такое как четыре, три, два, один или любое целочисленное значение. В варианте осуществления на Фиг. 12, максимальным значением является один. Счетчик уменьшается каждый последовательный подряд TTI, который не содержит данные. Если TTI содержит данные, счетчик повторно устанавливается в максимальное значение. В примере на Фиг. 12, в TTIn+3, если отсутствуют данные для передачи, счетчик уменьшается до нуля. Нулевое значение счетчика указывает на то, что приемник должен далее сокращать свою полосу пропускания. Например, в TTIn+3, приемник сокращает свою полосу пропускания как показано (огибающая приемника переходит из широкой полосы пропускания в узкую полосу пропускания во время переходного периода 1230). Альтернативой счетчику обратного отсчета является то, что полоса пропускания приемника сокращается до узкой полосы пропускания в первом TTI, который не содержит данные.
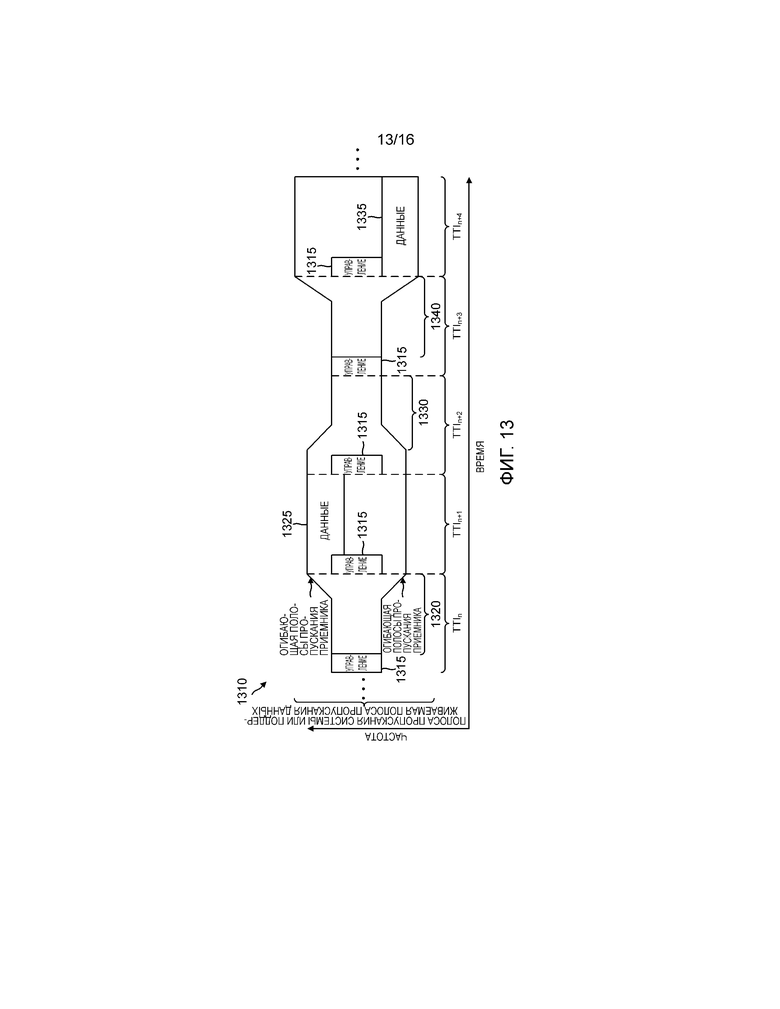
[0094] Фиг. 13 иллюстрирует другой формат 1310 кадра. Формат 1310 кадра похож на формат 1110 кадра, за исключением того, что для формата 1310 кадра, вариант осуществления приемника улучшен с помощью адаптации полосы пропускания в соответствии с распределением данных. Например, на Фиг. 11 во время TTIn+1 полоса пропускания приемника устанавливается в полосу пропускания системы или максимальную поддерживаемую полосу пропускания данных, тогда как на Фиг. 13 полоса пропускания приемника во время TTIn+1 устанавливается лишь настолько большой, чтобы принимать сигнал 1325 данных, при этом оставаясь симметричной относительно центральной частоты fc.
[0095] Кроме того, как на Фиг. 11, присутствует, по меньшей мере, две опции для сигнализации использования сигналов 1115 управления. В первой опции, сигнал 1115 управления в TTIn имеет индикатор переключателя полосы пропускания плюс информацию о полосе пропускания, чтобы инициировать расширения полосы пропускания RF внешнего интерфейса, чтобы она была достаточно широкой, чтобы принимать более широкую полосу пропускания данных в TTIn+1. Во второй опции, распределение 1125 блока радиосвязи данных в TTIn+1 распределяется или предварительно планируется, используя сигнал 1115 управления в TTIn. Как только установлена широкая полоса пропускания внешнего интерфейса радиосвязи для TTIn+1, планирование может возвращаться к нормальному (т.е., отсутствует предварительное планирование) для последующих TTI. Например, сигнал 1115 управления в TTIn+4 указывает использование ресурса 1335 данных в TTIn+4. В качестве дополнительного примера, сигналы 1115 управления в TTIn+2 и TTIn+3 указывают на то, что отсутствуют данные в соответствующих TTI так, что полоса пропускания приемника остается узкой и приемник может переходить в состояние микро-сна.
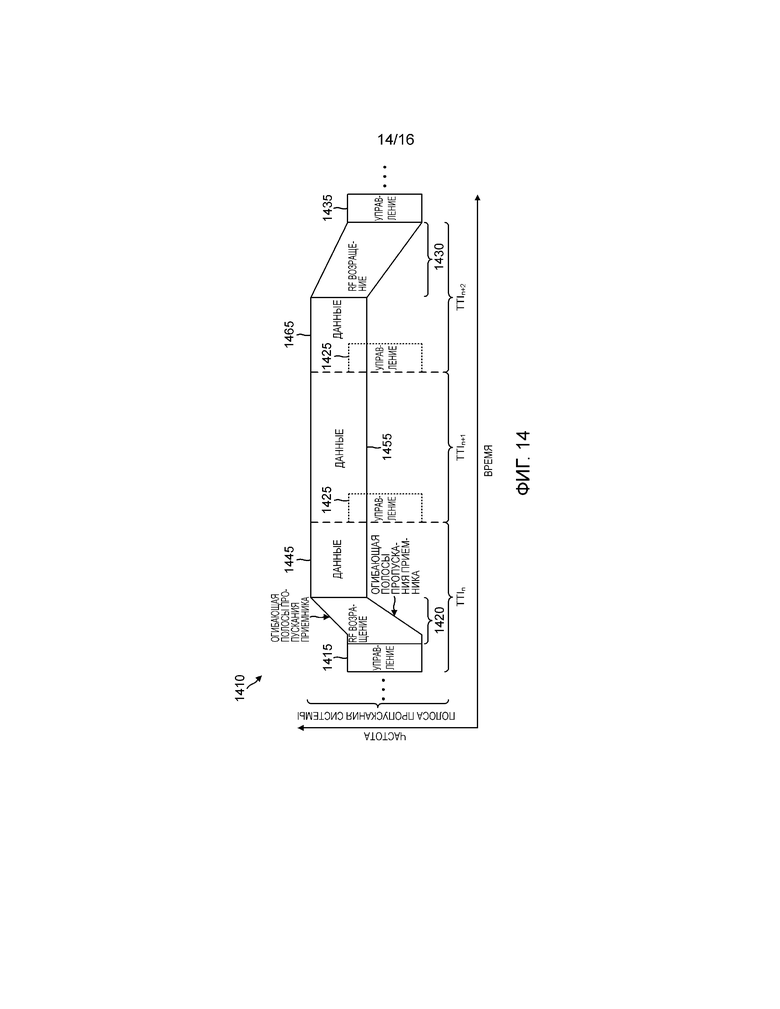
[0096] Фиг. 14 иллюстрирует другой формат 1410 кадра. Когда используется данный формат 1410 кадра центральная частота может не оставаться неизменной независимо от TTI. Данный формат кадра способствует использованию приемника, который может варьировать свою центральную частоту и полосу пропускания RF внешнего интерфейса. Указывается огибающая полосы пропускания приемника.
[0097] Полоса пропускания приемника центрируется на частоте в центре сигнала 1415 управления в TTIn, а затем центр сдвигается во время переходного периода 1420 в частоту в центре сигнала 1445 данных.
[0098] Данный формат 1410 кадра объединенный с предварительным планированием сигналов 1445, 1455, и 1465 данных, используя сигнал 1415 управления, подразумевает, что сигналы 1425 управления могут быть проигнорированы приемником, сконфигурированным для приема сигналов 1445, 1455 и 1465 данных. Как иллюстрируется на Фиг. 14 может быть выполнено предварительное планирование частичных TTI в отношении сигналов данных. Например, сигналы 1445 и 1465 данных занимают порцию интервала времени TTI, и продолжительность сигналов данных может быть указана посредством сигнала 1415 управления. После сигнала 1465 данных, RF внешний интерфейс может быть возвращен к полосе пропускания для сигнала 1435 управления во время переходного периода 1430.
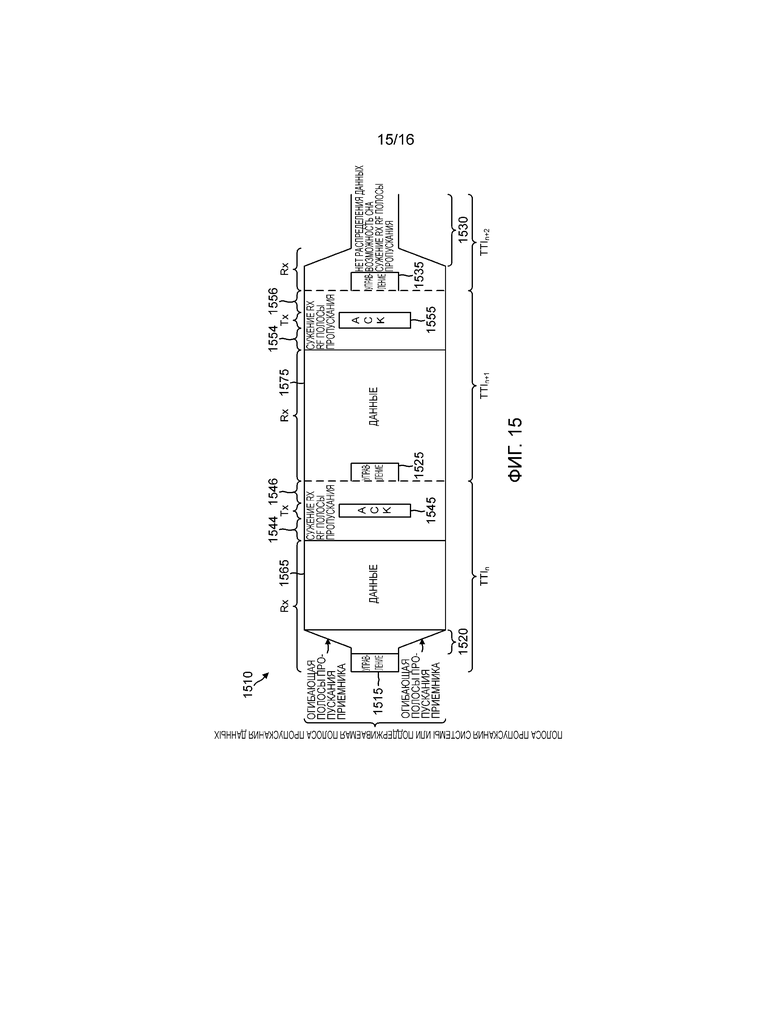
[0099] Фиг. 15 иллюстрирует другой формат 1510 кадра. Формат 1510 кадра является примерным форматом TDM, в котором сигналы управления и сигналы данных принимаются посредством UE, и сообщения квитирования (ACK) передаются посредством UE в ответ на прием сигналов данных. В варианте осуществления, ACK используется, чтобы указывать, был ли весь или часть предшествующего сигнала данных принята корректно. В данном формате 1510 кадра полоса пропускания RF внешнего интерфейса приемника сохраняется на полосе пропускания системы или максимальной доступной полосе пропускания данных до тех пор, пока не принимается TTI, в котором отсутствует распределение данных. Например, в TTIn+2, сигнал 1535 управления указывает на то, что отсутствуют данные в TTI так, что приемник может сокращать свою полосу пропускания во время переходного периода 1530, как показано. Защитные периоды могут быть вставлены по обе стороны ACK. Например, защитные периоды 1544 и 1546 вставляются по обе стороны ACK 1445.
[0100] Примерный вариант осуществления планирования сигналов данных в соответствии с форматом 1510 кадра является следующим. Сигнал 1515 управления в TTIn может быть использован, чтобы планировать сигнал 1565 данных в отношении порции TTI. После приема сигнала 1515 управления приемник осуществляет переход его полосы пропускания RF внешнего интерфейса, чтобы принимать сигнал 1565 данных, как показано. В качестве альтернативы (не иллюстрируется), сигнал 1515 управления в TTIn может нести индикатор переключателя полосы пропускания или информацию предварительного планирования, сходно со схемой, описанной на Фиг. 11, и распределение данных откладывается до TTIn+1. Данная схема обеспечивает распределение RB данных только для порции TTI (как в 1565), за счет задержанного начала для пересылки данных. Вследствие этого, полоса пропускания RF внешнего интерфейса сохраняется на широкой полосе пропускания до тех пор, пока сигнал управления в TTI не указывает на то, что данные отсутствуют в TTI. Узкополосный сигнал 1525 управления указывает на то, что сигнал 1575 данных присутствует так, что приемник конфигурируется чтобы принимать сигнал данных. Сигнал 1525 управления может использовать подмножество доступных поднесущих, и фрагмент сигнала 1575 данных, который является одновременным с сигналом 1525 управления, может занимать оставшиеся доступные поднесущие. Сигнал 1535 управления указывает на то, что отсутствуют данные в TTIn+2 так, что приемник сокращает полосу пропускания RF внешнего интерфейса и также может переходить в состояние микро-сна во время переходного периода 1530.
[0101] Некоторые преимущества формата 1510 кадра включают в себя следующее. Во-первых, применительно к последовательному распределению данных TTI, как только потрачены ресурсы на служебные данные для расширения RF полосы пропускания (вызывающие задержанное начало блоков радиосвязи данных), в последующем TTI отсутствуют служебные данные блока радиосвязи данных. Во-вторых, также могут быть применены улучшения применительно к переходам широкополосный-к-узкополосному, такие как таймер обратного отсчета или индикатор переключателя полосы пропускания, описанные в отношении Фиг. 12.
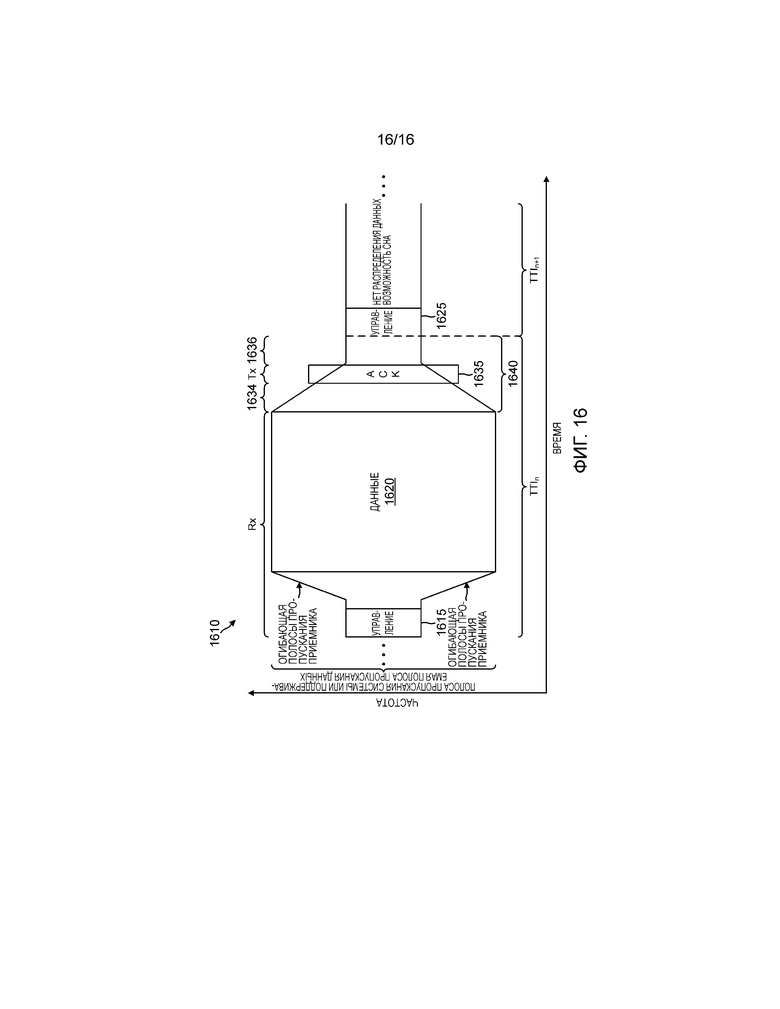
[0102] Фиг. 16 иллюстрирует другой формат 1610 кадра. Формат 1610 кадра является примерным форматом TDM, в котором сигналы управления и сигналы данных принимаются посредством UE, и ACK передаются посредством UE в ответ на прием сигналов данных. Примерный вариант осуществления планирования сигналов данных в соответствии с форматом 1610 кадра является следующим. Сигнал 1615 управления в TTIn может быть использован, чтобы планировать сигнал 1620 данных применительно к порции TTI. После приема сигнала 1615 управления приемник осуществляет переход своей полосы пропускания RF внешнего интерфейса, чтобы принимать сигнал 1620 данных, как показано. Приемник переключается обратно на узкополосную полосу пропускания для приема каждого сигнала управления как показано. Например, приемник переходит на узкую полосу пропускания во время переходного периода 1640 и затем принимает сигнал 1625 управления, используя узкую полосу пропускания, как показано. Преимущество формата 1610 кадра может включать в себя то, что поведение переключения полосы пропускания является одинаковым по TTI.
[0103] После того как стало понятно, каким образом форматы кадра на Фиг. 3 и 5 могут быть реализованы, используя регулируемый приемник 200, как описано ранее, легко понятно, что форматы кадров на Фиг. 11-16 могут быть реализованы простым способом, используя регулируемый приемник 200.
[0104] Разнообразные иллюстративные блоки и модули, описываемые в связи с раскрытием в данном документе, могут быть реализованы или выполнены с помощью процессора общего назначения, DSP, ASIC, FPGA или другого программируемого логического устройства, дискретной вентильной или транзисторной логики, дискретных компонентов аппаратного обеспечения, или любого их сочетания исполненного, чтобы выполнять описываемые в данном документе функции. Процессор общего назначения может быть микропроцессором, но в качестве альтернативы, процессор может быть любым обычным процессором, контроллером, микроконтроллером, или конечным автоматом. Процессор также может быть реализован в качестве сочетания вычислительных устройств (например, сочетания DSP и микропроцессора, нескольких микропроцессоров, одного или более микропроцессоров совместно с ядром DSP, или любой другой такой конфигурации).
[0105] Функции, описываемые в данном документе, могут быть реализованы в аппаратном обеспечении, программном обеспечении, исполняемом посредством процессора, встроенном программном обеспечении, или любом их сочетании. При реализации в программном обеспечении, исполняемом посредством процессора, функции могут быть сохранены на или переданы через в качестве одной или более инструкций или кода на машиночитаемом носителе информации. Другие примеры и реализации находятся в рамках объема раскрытия и прилагаемой формулы изобретения. Например, из-за природы программного обеспечения, функции, описанные выше, могут быть реализованы, используя программное обеспечение, исполняемое посредством процессора, аппаратное обеспечение, встроенное программное обеспечение, проводную схему, или сочетаний любых из этих. Признаки, реализующие функции, могут быть физически расположены в разных позициях, включая распределенные таким образом, что фрагменты функций реализуются в разных физических местоположениях. Также, используемое в данном документе, включая в формуле изобретения, «или», как используемое в перечислении элементов (например, перечисление элементов, которое предваряется фразой такой как «по меньшей мере, одно из» или «один или более из»), указывает включающее перечисление такое, что, например, перечисление вида [по меньшей мере, одно из A, B, или C] означает A или B или C или AB или AC или BC или ABC (т.е., A и B и C).
[0106] Поскольку специалистам в соответствующей области будут теперь понятно и в зависимости от конкретного имеющегося в наличие приложения, что многие модификации, замены и вариации могут быть выполнены в и в отношении материалов, устройства, конфигураций и способов использования устройств настоящего раскрытия, не отступая от его сущности и объема. В свете этого, объем настоящего раскрытия не должен ограничиваться конкретными вариантами осуществления, иллюстрируемыми и описываемыми в данном документе, поскольку они являются всего лишь некоторыми его примерами, а наоборот, должен полностью соответствовать приложенной далее формуле изобретения и ее функциональным эквивалентам.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИФИЦИРОВАННАЯ СТРУКТУРА КАДРА | 2015 |
|
RU2681084C2 |
| ПЕРЕДАЧА СИГНАЛА ДАННЫХ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ С УМЕНЬШЕННОЙ СКВОЗНОЙ ЗАДЕРЖКОЙ | 2019 |
|
RU2728539C1 |
| ПЕРЕДАЧА СИГНАЛА ДАННЫХ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ С УМЕНЬШЕННОЙ СКВОЗНОЙ ЗАДЕРЖКОЙ | 2015 |
|
RU2697267C1 |
| РАСШИРЕНИЯ UTRAN ДЛЯ ПОДДЕРЖКИ ПОДАВЛЕНИЯ МЕЖСОТОВЫХ ПОМЕХ | 2009 |
|
RU2468541C2 |
| ПЕРЕДАЧА СИГНАЛА ДАННЫХ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ С УМЕНЬШЕННОЙ СКВОЗНОЙ ЗАДЕРЖКОЙ | 2019 |
|
RU2738089C1 |
| КАДРИРОВАНИЕ, ДИСПЕТЧЕРИЗАЦИЯ И СИНХРОНИЗАЦИЯ В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ | 2016 |
|
RU2694586C1 |
| УЛУЧШЕННОЕ ВЫКАЛЫВАНИЕ И СТРУКТУРА КОДА С МАЛОЙ ПЛОТНОСТЬЮ ПРОВЕРОК НА ЧЕТНОСТЬ (LDPC) | 2017 |
|
RU2718171C1 |
| ГИБКОЕ МУЛЬТИПЛЕКСИРОВАНИЕ И ОБРАТНАЯ СВЯЗЬ ДЛЯ ПЕРЕМЕННЫХ ВРЕМЕННЫХ ИНТЕРВАЛОВ | 2015 |
|
RU2689995C2 |
| УПРАВЛЕНИЕ МОЩНОСТЬЮ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ В АДАПТИВНО СКОНФИГУРИРОВАННЫХ СИСТЕМАХ СВЯЗИ TDD | 2014 |
|
RU2645148C2 |
| ЗАДЕРЖАННАЯ УПРАВЛЯЮЩАЯ ОБРАТНАЯ СВЯЗЬ В НЕСУЩЕЙ С ДУПЛЕКСОМ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ С ИСПОЛЬЗОВАНИЕМ ОБЩИХ ПАКЕТОВ | 2016 |
|
RU2719316C2 |
Изобретение относится к беспроводной связи. Техническим результатом является эффективное мультиплексирование каналов управления и данных по мере того, как увеличивается доступная полоса пропускания. Раскрыты системы, способы, устройства и носители информации для выполнения динамического переключения полосы пропускания между сигналами управления и сигналами данных разных пропускных способностей. Раскрыты форматы кадра, в которых сигналы управления передаются в других полосах пропускания чем те, что у сигналов данных. Раскрыты архитектуры приемника для приема сигнализации. Приемник может принимать относительно узкополосный сигнал управления, при потреблении относительно низкой энергии, и затем динамически регулировать характеристики разнообразных компонентов, чтобы принимать сигнал данных на более высокой полосе пропускания, при потреблении относительно более высокой энергии. 7 н. и 58 з.п. ф-лы. 16 ил.
1. Способ беспроводной связи, содержащий этапы, на которых:
передают сигнал управления в мобильное устройство, используя первую полосу пропускания; и
передают сигнал данных в мобильное устройство, используя вторую полосу пропускания, более широкую, чем первая полоса пропускания,
при этом сигнал управления и сигнал данных передаются на одной несущей частоте, причем сигнал управления содержит указание характеристики сигнала данных, и при этом сигнал данных передается после сигнала управления так, что сигнал данных и сигнал управления разделены интервалом времени, каковой интервал времени основан на задержке переключения мобильного устройства.
2. Способ по п.1, в котором упомянутое указание указывает на то, что вторая полоса пропускания полностью занимает доступную полосу пропускания.
3. Способ по п.1, в котором упомянутое указание указывает на то, что вторая полоса пропускания занимает только часть доступной полосы пропускания.
4. Способ по п.1, дополнительно содержащий этапы, на которых:
передают второй сигнал управления, используя вторую полосу пропускания, при этом второй сигнал управления указывает на то, что отсутствует последующий сигнал данных перед третьим сигналом управления; и
передают третий сигнал управления, используя первую полосу пропускания.
5. Способ по п.1, в котором второй сигнал управления содержит часть сигнала управления и часть сигнала данных.
6. Способ по п.1, дополнительно содержащий этап, на котором передают второй сигнал данных в мобильное устройство с использованием третьей полосы пропускания на упомянутой одной несущей частоте, при этом третья полоса пропускания более широкая, чем первая полоса пропускания, и отлична от второй полосы пропускания.
7. Способ по п.1, дополнительно содержащий этапы, на которых:
принимают сообщение о возможностях от мобильного устройства, при этом сообщение о возможностях содержит указание возможности динамического переключения полосы пропускания мобильного устройства;
передают сообщение ответа, содержащее указание того, что активируется динамическое переключение полосы пропускания.
8. Способ по п.7, в котором сообщение о возможностях дополнительно содержит указание задержки переключения мобильного устройства, при этом способ дополнительно содержит этап, на котором определяют упомянутый интервал времени между сигналом управления и сигналом данных на основе указания задержки переключения, причем сообщение ответа дополнительно содержит указание упомянутого интервала времени.
9. Способ по п.1, дополнительно содержащий этап, на котором передают второй сигнал данных во второе мобильное устройство, используя вторую одну несущую частоту, при этом вторая одна несущая частота отличается от упомянутой одной несущей частоты, причем второй сигнал данных перекрывается по времени с упомянутым сигналом данных и не перекрывается по частоте с упомянутым сигналом данных.
10. Способ беспроводной связи в мобильном устройстве, содержащий этапы, на которых:
принимают сигнал управления с первой полосой пропускания; и
принимают сигнал данных со второй полосой пропускания, более широкой, чем первая полоса пропускания,
при этом сигнал управления и сигнал данных принимаются на одной несущей частоте, причем сигнал управления содержит указание характеристики сигнала данных, и при этом сигнал данных передается после сигнала управления так, что сигнал данных и сигнал управления разделены интервалом времени, каковой интервал времени основан на задержке переключения мобильного устройства.
11. Способ по п.10, в котором упомянутое указание указывает на то, что вторая полоса пропускания полностью занимает доступную полосу пропускания.
12. Способ по п.10, в котором упомянутое указание указывает на то, что вторая полоса пропускания занимает только часть доступной полосы пропускания.
13. Способ по п.10, дополнительно содержащий этап, на котором осуществляют переключение с первой полосы пропускания на вторую полосу пропускания после приема сигнала управления и осуществляют переключение со второй полосы пропускания на первую полосу пропускания после приема сигнала данных.
14. Способ по п.10, дополнительно содержащий этап, на котором принимают второй сигнал данных с использованием третьей полосы пропускания на упомянутой одной несущей частоте, при этом третья полоса пропускания более широкая, чем первая полоса пропускания, и отлична от второй полосы пропускания.
15. Способ по п.10, дополнительно содержащий этап, на котором регулируют радиочастотный (RF) внешний интерфейс мобильного устройства, чтобы осуществлять прием с использованием второй полосы пропускания.
16. Способ по п.10, дополнительно содержащий этап, на котором, в ответ на прием сигнала управления, регулируют радиочастотный (RF) внешний интерфейс мобильного устройства, чтобы осуществлять прием с использованием второй полосы пропускания.
17. Способ по п.10, в котором упомянутая характеристика является второй полосой пропускания, при этом способ дополнительно содержит этап, на котором, в ответ на указание второй полосы пропускания, регулируют радиочастотный (RF) внешний интерфейс мобильного устройства, чтобы осуществлять прием с использованием второй полосы пропускания.
18. Способ по п.10, дополнительно содержащий этапы, на которых:
передают сообщение о возможностях, при этом сообщение о возможностях содержит указание возможности динамического переключения полосы пропускания мобильного устройства; и
принимают сообщение ответа, содержащее указание того, что активируется динамическое переключение полосы пропускания.
19. Способ по п.18, в котором сообщение о возможностях дополнительно содержит указание задержки переключения мобильного устройства, при этом сообщение ответа дополнительно содержит указание упомянутого интервала времени между сигналом управления и сигналом данных, каковой интервал времени основан на указании задержки переключения, при этом способ дополнительно содержит этап, на котором регулируют радиочастотный (RF) внешний интерфейс мобильного устройства в течение упомянутого интервала времени, чтобы осуществлять прием с использованием второй полосы пропускания.
20. Способ по п.19, в котором сообщение ответа или сигнал управления дополнительно содержит указание переключения сигнала управления, при этом способ дополнительно содержит этапы, на которых:
в ответ на указание переключения сигнала управления, сохраняют RF внешний интерфейс так, чтобы осуществлять прием с использованием второй полосы пропускания сразу после приема сигнала данных; и
принимают второй сигнал управления, используя вторую полосу пропускания сразу после сигнала данных.
21. Способ по п.20, в котором второй сигнал управления указывает на то, что отсутствует последующий сигнал данных перед третьим сигналом управления, при этом способ дополнительно содержит этап, на котором принимают третий сигнал управления, используя первую полосу пропускания.
22. Способ по п.20, в котором второй сигнал управления указывает на то, что присутствует последующий сигнал данных, при этом способ дополнительно содержит этап, на котором принимают последующий сигнал данных, используя вторую полосу пропускания.
23. Способ по п.10, дополнительно содержащий этап, на котором принимают второй сигнал данных с использованием третьей полосы пропускания на второй одной несущей частоте, причем третья полоса пропускания более широкая, чем первая полоса пропускания, и отлична от второй полосы пропускания, и при этом упомянутая одна несущая частота и вторая одна несущая частота разные.
24. Способ по п.10, в котором сигнал управления и сигнал данных находятся в одном и том же интервале времени передачи (TTI).
25. Способ по п.10, в котором сигнал управления и сигнал данных находятся в другом интервале времени передачи (TTI).
26. Способ по п.10, дополнительно содержащий этап, на котором принимают второй сигнал управления, используя вторую полосу пропускания, причем второй сигнал управления указывает на то, что отсутствует последующий сигнал данных в интервале времени передачи (TTI), при этом упомянутое указание переустанавливает счетчик в максимальное значение, причем счетчик уменьшается с каждым последующим TTI, который не включает в себя данные, при этом полоса пропускания сохраняется на второй полосе пропускания до тех пор, пока счетчик не достигает нуля, причем приемник переходит на первую полосу пропускания, когда счетчик достигает нуля.
27. Способ по п.16, в котором вторая полоса пропускания занимает только часть доступной полосы пропускания.
28. Способ по п.21, в котором в ответ на второй сигнал управления, указывающий на то, что отсутствует последующий сигнал данных, выключают часть радиочастотного внешнего интерфейса мобильного устройства во время части упомянутого интервала времени между вторым сигналом управления и третьим сигналом управления.
29. Долговременный машиночитаемый носитель информации с записанным на нем программным кодом, при этом программный код включает в себя:
код для предписания передатчику передавать сигнал управления в устройство, используя первую полосу пропускания; и
код для предписания передатчику передавать сигнал данных в устройство, используя вторую полосу пропускания, более широкую, чем первая полоса пропускания,
при этом сигнал управления и сигнал данных передаются на одной несущей частоте, причем сигнал управления содержит указание характеристики сигнала данных, и при этом сигнал данных передается после сигнала управления так, что сигнал данных и сигнал управления разделены интервалом времени, каковой интервал времени основан на задержке переключения устройства.
30. Долговременный машиночитаемый носитель информации по п.29, при этом упомянутое указание указывает на то, что вторая полоса пропускания полностью занимает доступную полосу пропускания.
31. Долговременный машиночитаемый носитель информации по п.29, при этом упомянутое указание указывает на то, что вторая полоса пропускания занимает только часть доступной полосы пропускания.
32. Долговременный машиночитаемый носитель информации по п.29, дополнительно содержащий:
код для предписания передатчику передавать второй сигнал управления, используя вторую полосу пропускания, при этом второй сигнал управления указывает на то, что отсутствует последующий сигнал данных перед третьим сигналом управления; и
код для предписания передатчику передавать третий сигнал управления, используя первую полосу пропускания.
33. Долговременный машиночитаемый носитель информации по п.29, дополнительно содержащий код для предписания передатчику передавать второй сигнал данных в устройство с использованием третьей полосы пропускания на упомянутой одной несущей частоте, при этом третья полоса пропускания более широкая, чем первая полоса пропускания, и отлична от второй полосы пропускания.
34. Долговременный машиночитаемый носитель информации по п.29, дополнительно содержащий:
код для предписания приемнику принимать сообщение о возможностях от устройства, при этом сообщение о возможностях содержит указание возможности динамического переключения полосы пропускания устройства;
код для предписания передатчику передавать сообщение ответа, содержащее указание того, что активируется динамическое переключение полосы пропускания.
35. Долговременный машиночитаемый носитель информации по п.34, при этом сообщение о возможностях дополнительно содержит указание задержки переключения устройства, причем долговременный машиночитаемый носитель информации дополнительно содержит код для предписания процессору определять упомянутый интервал времени между сигналом управления и сигналом данных на основе указания задержки переключения, при этом сообщение ответа дополнительно содержит указание упомянутого интервала времени.
36. Долговременный машиночитаемый носитель информации по п.35, при этом сигнал данных передается после сигнала управления так, что сигнал данных и сигнал управления разделены упомянутым интервалом времени.
37. Долговременный машиночитаемый носитель информации с записанным на нем программным кодом, при этом программный код включает в себя:
код для предписания приемнику принимать сигнал управления с первой полосой пропускания; и
код для предписания приемнику принимать сигнал данных со второй полосой пропускания, более широкой, чем первая полоса пропускания,
при этом сигнал управления и сигнал данных принимаются на одной несущей частоте, причем сигнал управления содержит указание характеристики сигнала данных, и при этом сигнал данных передается после сигнала управления так, что сигнал данных и сигнал управления разделены интервалом времени, каковой интервал времени основан на задержке переключения приемника.
38. Долговременный машиночитаемый носитель информации по п.37, при этом упомянутое указание указывает на то, что вторая полоса пропускания полностью занимает доступную полосу пропускания.
39. Долговременный машиночитаемый носитель информации по п.37, при этом упомянутое указание указывает на то, что вторая полоса пропускания занимает только часть доступной полосы пропускания.
40. Долговременный машиночитаемый носитель информации по п.37, дополнительно содержащий:
код для предписания приемнику осуществлять переключение с первой полосы пропускания на вторую полосу пропускания после приема сигнала управления; и
код для предписания приемнику осуществлять переключение со второй полосы пропускания на первую полосу пропускания после приема сигнала данных.
41. Долговременный машиночитаемый носитель информации по п.37, дополнительно содержащий код для предписания приемнику принимать второй сигнал данных с использованием третьей полосы пропускания на упомянутой одной несущей частоте, при этом третья полоса пропускания более широкая, чем первая полоса пропускания, и отлична от второй полосы пропускания.
42. Долговременный машиночитаемый носитель информации по п.37, при этом приемник содержит радиочастотный (RF) внешний интерфейс, причем долговременный машиночитаемый носитель информации дополнительно содержит код для регулировки RF внешнего интерфейса, чтобы осуществлять прием с использованием второй полосы пропускания.
43. Долговременный машиночитаемый носитель информации по п.37, при этом приемник содержит радиочастотный (RF) внешний интерфейс, причем долговременный машиночитаемый носитель информации дополнительно содержит код для, в ответ на прием сигнала управления, регулировки RF внешнего интерфейса, чтобы осуществлять прием с использованием второй полосы пропускания.
44. Долговременный машиночитаемый носитель информации по п.37, при этом приемник содержит радиочастотный (RF) внешний интерфейс, причем упомянутая характеристика является второй полосой пропускания, при этом долговременный машиночитаемый носитель информации дополнительно содержит код для, в ответ на указание второй полосы пропускания, регулировки RF внешнего интерфейса, чтобы осуществлять прием с использованием второй полосы пропускания.
45. Долговременный машиночитаемый носитель информации по п.37, дополнительно содержащий:
код для предписания передатчику передавать сообщение о возможностях, при этом сообщение о возможностях содержит указание возможности динамического переключения полосы пропускания мобильного устройства; и
код для предписания приемнику принимать сообщение ответа, содержащее указание того, что активируется динамическое переключение полосы пропускания.
46. Долговременный машиночитаемый носитель информации по п.45, при этом сообщение о возможностях дополнительно содержит указание задержки переключения мобильного устройства, причем сообщение ответа дополнительно содержит указание упомянутого интервала времени между сигналом управления и сигналом данных, каковой интервал времени основан на указании задержки переключения, при этом приемник содержит радиочастотный (RF) внешний интерфейс, причем долговременный машиночитаемый носитель информации дополнительно содержит код для предписания RF внешнему интерфейсу выполнять, в течение упомянутого интервала времени, регулировку, чтобы осуществлять прием с использованием второй полосы пропускания.
47. Долговременный машиночитаемый носитель информации по п.46, при этом сообщение ответа или сигнал управления дополнительно содержит указание переключения сигнала управления, при этом долговременный машиночитаемый носитель информации дополнительно содержит:
код для, в ответ на указание переключения сигнала управления, сохранения RF внешнего интерфейса так, чтобы осуществлять прием с использованием второй полосы пропускания сразу после приема сигнала данных; и
код для предписания приемнику принимать второй сигнал управления с использованием второй полосы пропускания сразу после сигнала данных.
48. Долговременный машиночитаемый носитель информации по п.46, при этом второй сигнал управления указывает на то, что отсутствует последующий сигнал данных перед третьим сигналом управления, причем долговременный машиночитаемый носитель информации дополнительно содержит код для предписания приемнику принимать третий сигнал управления, используя первую полосу пропускания.
49. Долговременный машиночитаемый носитель информации по п.46, при этом второй сигнал управления указывает на то, что присутствует последующий сигнал данных, причем долговременный машиночитаемый носитель информации дополнительно содержит код для предписания приемнику принимать этот последующий сигнал данных с использованием второй полосы пропускания.
50. Мобильное устройство, содержащее:
регулируемый радиочастотный (RF) внешний интерфейс, выполненный с возможностью:
приема сигнала управления с первой полосой пропускания; и
приема сигнала данных со второй полосой пропускания, более широкой, чем первая полоса пропускания,
при этом сигнал управления и сигнал данных принимаются на одной несущей частоте, причем сигнал управления содержит указание характеристики сигнала данных, при этом сигнал данных передается после сигнала управления так, что сигнал данных и сигнал управления разделены интервалом времени, причем упомянутый интервал времени основан на задержке переключения мобильного устройства.
51. Мобильное устройство по п. 50, в котором регулируемый RF внешний интерфейс содержит:
усилитель;
аналого-цифровой преобразователь (ADC); и
аналоговый фильтр, подсоединенный между усилителем и ADC, при этом усилитель, аналоговый фильтр и ADC выполнены с возможностью:
приема от процессора управления первых сигналов команды на осуществление регулировки, чтобы принимать сигнал управления с первой полосой пропускания; и
приема от процессора управления вторых сигналов команды на осуществление регулировки, чтобы принимать сигнал данных со второй полосой пропускания.
52. Мобильное устройство по п.50, в котором регулировка для приема сигнала данных происходит в течение упомянутого интервала времени.
53. Мобильное устройство по п.50, в котором упомянутое указание указывает на то, что вторая полоса пропускания полностью занимает доступную полосу пропускания.
54. Мобильное устройство по п.50, в котором упомянутое указание указывает на то, что вторая полоса пропускания занимает только часть доступной полосы пропускания.
55. Мобильное устройство по п.50, в котором сигнал управления и сигнал данных находятся в одном и том же интервале времени передачи (TTI).
56. Мобильное устройство по п.50, в котором сигнал управления и сигнал данных находятся в другом интервале времени передачи (TTI).
57. Мобильное устройство по п.51, в котором усилитель, аналоговый фильтр и ADC дополнительно выполнены с возможностью приема от процессора управления третьих сигналов команды на осуществление регулировки, чтобы принимать второй сигнал управления, при этом второй сигнал управления указывает на то, что отсутствует последующий сигнал данных в интервале времени передачи (TTI), причем в ответ на упомянутое указание счетчик переустанавливается в максимальное значение, при этом счетчик уменьшается с каждым последующим TTI, который не включает в себя данные, причем полоса пропускания сохраняется на второй полосе пропускания до тех пор, пока счетчик не достигает нуля, и при этом приемник переходит на первую полосу пропускания, когда счетчик достигает нуля.
58. Мобильное устройство по п.51, при этом вторая полоса пропускания занимает только часть доступной полосы пропускания.
59. Мобильное устройство по п.51, в котором усилитель, аналоговый фильтр и ADC дополнительно выполнены с возможностью приема от процессора управления третьих сигналов команды на осуществление регулировки, чтобы принимать второй сигнал управления, при этом второй сигнал управления указывает на то, что отсутствует последующий сигнал данных в интервале времени передачи (TTI), причем в ответ на второй сигнал управления, указывающий на то, что отсутствует последующий сигнал данных, по меньшей мере один из усилителя, аналогового фильтра и ADC выполнен с возможностью отключаться в течении части TTI.
60. Устройство беспроводной связи, содержащее:
усилитель;
аналого-цифровой преобразователь (ADC);
аналоговый фильтр, подсоединенный между усилителем и ADC; и
процессор управления, соединенный с усилителем, ADC и аналоговым фильтром, при этом процессор управления выполнен с возможностью:
в ответ на прием информации управления из сигнала управления с первой полосой пропускания:
устанавливать полосу пропускания усилителя и ADC во вторую полосу пропускания, более широкую, чем первая полоса пропускания, и используемую для сигнала данных; и
устанавливать частоту дискретизации ADC в соответствии со второй полосой пропускания, при этом сигнал управления и сигнал данных принимаются на одной несущей частоте, причем сигнал управления содержит указание характеристики сигнала данных, и при этом сигнал данных передается после сигнала управления так, что сигнал данных и сигнал управления разделены интервалом времени, каковой интервал времени основан на задержке переключения устройства беспроводной связи.
61. Устройство беспроводной связи по п.60, при этом упомянутое указание указывает на то, что вторая полоса пропускания полностью занимает доступную полосу пропускания.
62. Устройство беспроводной связи по п.60, при этом упомянутое указание указывает на то, что вторая полоса пропускания занимает только часть доступной полосы пропускания.
63. Устройство беспроводной связи, содержащее:
процессор управления, выполненный с возможностью:
соединения с радиочастотным (RF) внешним интерфейсом;
регулировки RF внешнего интерфейса, чтобы принимать сигнал управления с первой полосой пропускания; и
регулировки RF внешнего интерфейса, чтобы принимать сигнал данных со второй полосой пропускания, более широкой, чем первая полоса пропускания, при этом сигнал управления и сигнал данных принимаются на одной несущей частоте, причем сигнал управления содержит указание характеристики сигнала данных, и при этом сигнал данных передается после сигнала управления так, что сигнал данных и сигнал управления разделены интервалом времени, каковой интервал времени основан на задержке переключения устройства беспроводной связи.
64. Устройство беспроводной связи по п.63, в котором процессор управления дополнительно выполнен с возможностью:
соединения с основополосным процессором;
приема от основополосного процессора информации управления, полученной из сигнала управления,
при этом регулировка RF внешнего интерфейса, чтобы принимать сигнал данных, осуществляется в ответ на информацию управления.
65. Устройство беспроводной связи по п.64, при этом информацией управления предоставляется указание второй полосы пропускания.
| HUAWEI: "Energy saving techniques to support low load scenarios", 3GPP DRAFT; R1-101084 ENERGY SAVINGS, 3RD GENERATION PARTNERSHIP PROGECT (3GPP), MOBILE COMPETENCE CENTRE; 650, ROUTE DES LUCIOLES; F-0692 | |||
| SOPHIA-ANTIPOLIS CEDEX; FRANCE, vol | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| San Francisco, USA; 20100222, 17 February 2010 (2010-02-17), XP050418977 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ/ПРИЕМА ДАННЫХ И УПРАВЛЯЮЩЕЙ ИНФОРМАЦИИ ЧЕРЕЗ ВОСХОДЯЩУЮ ЛИНИЮ СВЯЗИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2434365C2 |
| СМЕСИТЕЛЬ | 1994 |
|
RU2077634C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

