Изобретение относится к аппаратам воздушного охлаждения газа и может использоваться, в частности, для охлаждения газа после компримирования на компрессорных станциях магистральных газопроводов.
Аппарат воздушного охлаждения содержит теплообменник, по которому прокачивается охлаждаемый газ, и вентиляторы, создающие поток охлаждающего воздуха. Типовой аппарат воздушного охлаждения газа, например, широко используемый в установках охлаждения газа аппарат 2АВГ-75, содержит два вентилятора, приводимых в движение асинхронными короткозамкнутыми двигателями. Для управления частотой вращения вентиляторов каждого аппарата воздушного охлаждения, как правило, используется один частотный преобразователь, к выходу которого подключены оба двигателя вентиляторов аппарата. Систему управления выполняют в виде системы с отрицательной обратной связью по температуре газа на выходе аппарата. Для обеспечения устойчивости системы и требуемых динамических характеристик в систему вводят регуляторы.
Известна система управления аппаратами воздушного охлаждения [RU 2330993]. Недостатком устройства является недостаточно высокие показатели качества переходных процессов, в частности, переходного процесса изменения частоты вращения вентиляторов при ступенчатом изменении сигнала задания температуры.
Наиболее близкой по технической сущности является система управления аппаратом воздушного охлаждения газа [Абакумов A.M., Алимов С.В., Мигачева Л.А., Мосин В.Н. Автоматическое управление температурой газа на выходе аппаратов воздушного охлаждения / Вестник Самарского государственного технического университета. Серия «Технические науки». №1 - 2011. Самара, 2011. С. 151-158], содержащая блок задания температуры, задатчик интенсивности (фильтр), пропорционально-интегральный регулятор, частотный преобразователь, приводные двигатели вентиляторов, теплообменник и датчик температуры газа на выходе теплообменника. К системе управления аппаратами воздушного охлаждения предъявляются специфические требования. Наряду с требуемыми показателями качества регулирования температуры, система, для исключения динамических перегрузок кинематической части привода вентиляторов, должна обеспечивать протекание переходного процесса изменения частоты вращения вентиляторов при ступенчатом изменении сигнала задания температуры без существенного перерегулирования.
Недостаток наиболее близкой по технической сущности системы управления аппаратом воздушного охлаждения газа заключается в том, что ее показатели качества регулирования существенно изменяются при изменении температуры окружающей среды и динамических характеристик электропривода.
Кроме того, в известной системе, для снижения перерегулирования переходного процесса изменения частоты вращения вентиляторов при ступенчатом изменении сигнала задания температуры, необходима установка на входе системы задатчика интенсивности (апериодического фильтра).
Кроме того, в известной системе содержится три настраиваемых параметра: постоянная времени задатчика интенсивности (фильтра), постоянная времени интегрирующего преобразования и постоянная времени дифференцирующего преобразования пропорционально-интегрального регулятора. Действительные значения параметров системы, по которым должны выбираться указанные постоянные времени, известны лишь приближенно. В связи с этим возникает задача экспериментальной настройки регулятора и фильтра с учетом фактических значений параметров системы. Большое количество настраиваемых параметров, усложняет настройку системы.
Техническим результатом использования изобретения является упрощение настройки системы и улучшение динамических характеристик системы в условиях вариаций ее параметров вследствие изменения внешних условий.
Сущность изобретения состоит в том, что система управления аппаратом воздушного охлаждения газа, содержащая блок задания температуры, первый регулятор, частотный преобразователь, асинхронные двигатели, вентиляторы, теплообменник и датчик температуры, причем выход первого регулятора соединен со входом частотного преобразователя, выход частотного преобразователя подключен к асинхронным электродвигателям, кинематически связанным с вентиляторами, воздействующими потоком воздуха на теплообменник, дополнительно снабжена вторым регулятором, выполненным в виде пропорционально-дифференциального регулятора, причем вход второго регулятора соединен с выходом датчика температуры, его выход подключен ко второму входу первого регулятора, выход блока задания температуры соединен с первым входом первого регулятора, при этом первый регулятор выполнен в виде интегрального регулятора, его постоянная времени выбирается по соотношению TR1=2kokEkDTE, где ko, kD - коэффициенты передачи теплообменника и датчика температуры, kE, ТЕ - коэффициент передачи и постоянная времени частотного преобразователя совместно с электродвигателями, соответственно, а постоянная времени дифференцирующего преобразования пропорционально-дифференциального регулятора выбирается равной расчетному значению постоянной времени теплообменника.
Существенные отличия находят свое выражение в новой совокупности блоков и связей устройства. Указанная совокупность блоков и связей позволяет уменьшить вариации показателей качества регулирования при изменении температуры окружающей среды и динамических характеристик электропривода, а также упростить настройку системы за счет уменьшения количества настраиваемых параметров регуляторов. В отличие от известной, в предлагаемой системе управления аппаратом воздушного охлаждения содержится только два настраиваемых параметра: постоянная времени интегрирующего преобразования первого регулятора и постоянная времени дифференцирующего преобразования второго регулятора.
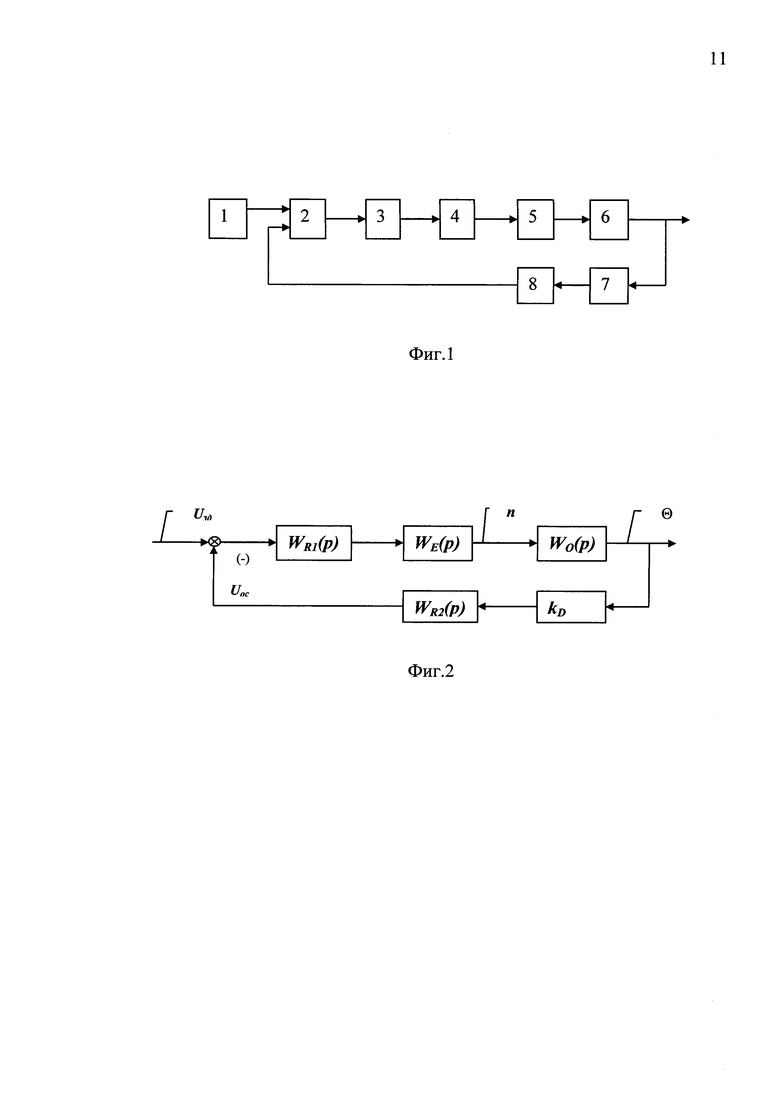
На фиг. 1 приведена функциональная схема системы управления аппаратом воздушного охлаждения газа; на фиг. 2 - структурная схема системы управления аппаратом воздушного охлаждения газа; на фиг. 3 - переходные процессы по задающему воздействию в предлагаемой системе управления аппаратом воздушного охлаждения газа; на фиг. 4 - графики зависимости времени регулирования в известной и предлагаемой системе управления аппаратом воздушного охлаждения газа при вариациях постоянной времени объекта управления.
Система управления аппаратом воздушного охлаждения газа (фиг. 1) содержит блок 1 задания температуры, интегральный регулятор (И-регулятор) 2, частотный преобразователь 3, асинхронные двигатели 4, вентиляторы 5, теплообменник 6, датчик температуры 7, пропорционально-дифференциальный регулятор (ПД-регулятор) 8.
Выход блока 1 задания температуры соединен с первым входом интегрального регулятора 2, выход которого соединен со входом частотного преобразователя 3. Выход частотного преобразователя 3 подключен к асинхронным электродвигателям 4, кинематически связанным с вентиляторами 5, воздействующими потоком воздуха на теплообменник 6, оснащенный датчиком температуры 7. Выход датчика температуры 7 через пропорционально-дифференциальный регулятор 8 соединен со вторым входом интегрального регулятора 2.
Система управления аппаратом воздушного охлаждения газа работает следующим образом. На входе И-регулятора 2 происходит сравнение сигнала, поступающего с блока 1 задания температуры, и сигнала датчика 7 температуры, поступающего на второй вход И-регулятора 2 через ПД-регулятор 8. При этом на выходе И-регулятора 2 формируется сигнал, определяющий частоту и напряжение на выходе частотного преобразователя 3 и, соответственно, напряжение и частоту на статорных обмотках электродвигателей 4. Последние приводят во вращение вентиляторы 5, воздействующие на теплообменник 6 потоком охлаждающего воздуха. Если сигнал на выходе датчика 7 температуры равен сигналу блока задания температуры, то система управления находится в установившемся режиме. При отклонении сигнала 7 датчика от сигнала блока 1 задания температуры соответствующим образом изменяется сигнал на выходе И-регулятора 2, изменяется частота и величина напряжения на выходе частотного преобразователя 3, изменяется частота вращения электродвигателей 4 вентиляторов 5. Вследствие этого изменяется интенсивность потока охлаждающего воздуха, воздействующего на теплообменник 6. Этот процесс продолжается до тех пор, пока сигнал на выходе датчика 7 температуры не станет равным сигналу блока 1 задания температуры. В результате обеспечивается стабилизация температуры газа на выходе аппарата воздушного охлаждения на заданном уровне.
Интегральный регулятор 2 придает системе астатические свойства, т.е. позволяет подавить возмущения, действующие на систему. Пропорционально-дифференциальный регулятор позволяет скомпенсировать наибольшую инерционность теплообменника и повысить быстродействие системы. Надлежащий выбор параметров регуляторов обеспечивает устойчивость системы и позволяет достичь требуемой точности стабилизации температуры газа на выходе аппарата воздушного охлаждения.
Для подтверждения сказанного рассмотрим структурную схему предлагаемой системы аппаратом воздушного охлаждения газа (фиг. 2). Она содержит интегральный И-регулятор с передаточной функцией

где TR1 - постоянная времени интегрирующего преобразования;
р - оператор Лапласа.
Знак минус в передаточной функции (1) показывает, что положительному приращению входного сигнала соответствует отрицательное приращение (уменьшение) выходного сигнала регулятора.
Динамические свойства частотного преобразователя, электродвигателей, вентиляторов, теплообменника и датчика температуры отражены так же, как в известной системе, соответствующими передаточными функциями. Передаточная функция частотного преобразователя и электродвигателя WE устанавливает взаимосвязь между приращением сигнала UR1 на входе частотного преобразователя и приращением частоты  вращения двигателей вентиляторов
вращения двигателей вентиляторов

где kE и ТЕ - коэффициент передачи и постоянная времени частотного преобразователя совместно с электродвигателями.
Передаточная функция  отражает динамические свойства процесса теплообмена в теплообменнике под воздействием создаваемого вентиляторами потока воздуха, и устанавливает взаимосвязь приращения температуры θ газа на выходе теплообменника и приращения частоты вращения
отражает динамические свойства процесса теплообмена в теплообменнике под воздействием создаваемого вентиляторами потока воздуха, и устанавливает взаимосвязь приращения температуры θ газа на выходе теплообменника и приращения частоты вращения  вентиляторов
вентиляторов

где ko и To - коэффициент передачи и постоянная времени процесса теплообмена.
Знак минус в выражении (3) отражает тот факт, что положительное приращение частоты вращения вентиляторов дает отрицательное приращение температуры газа на выходе АВО.
Динамические свойства датчика температуры описываются коэффициентом передачи kD.
Динамические свойства ПД-регулятора (называемого так же форсирующим звеном) описываются передаточной функцией

где TR2 - постоянная времени дифференцирующего преобразования. В предлагаемой системе постоянная времени TR2 выбирается равной постоянной времени To объекта:

Постоянная времени TR1 интегрирующего преобразования выбирается по условию

В известной системе в прямой цепи установлен пропорционально - интегральный регулятор, обеспечивающий компенсацию наибольшей постоянной To времени процесса теплообмена в теплообменнике. В результате без использования задатчика интенсивности (фильтра на входе системы) переходный процесс изменения частоты вращения вентиляторов при ступенчатом изменении задающего сигнала протекает с недопустимым перерегулированием.
В предлагаемой системе ПД-регулятор, обеспечивающий компенсацию наибольшей постоянной To времени процесса теплообмена в теплообменнике, установлен в цепи обратной связи. Благодаря этому достигается требуемый характер переходного процесса изменения частоты вращения вентиляторов без использования задатчика интенсивности (фильтра).
В соответствии со структурной схемой системы управления аппаратом воздушного охлаждения газа проведено моделирование динамических характеристик предлагаемой системы. При моделировании в качестве расчетного (эталонного) значения постоянной времени процесса теплообмена в теплообменнике, как и в известной системе принято: To=300с. В соответствии с выражением (5) постоянная времени TR2 принята равной TR2=300с.
Значение постоянной времени TR1 в соответствии с выражением (6) должно выбираться с учетом постоянной времени ТЕ. При использовании векторных систем частотного управления асинхронными двигателями постоянная времени ТЕ может рассматриваться как «малая» постоянная. В случае подключения к частотному преобразователю нескольких двигателей, как это имеет место в предлагаемой системе, используются параметрические системы управления асинхронными двигателями. В этом случае значение постоянной времени ТЕ может составлять несколько секунд. При моделировании принято значение ТЕ=15с, значение kokEkD=1. Постоянная времени И-регулятора, рассчитанная по формуле (6), составляет TR1=30с.
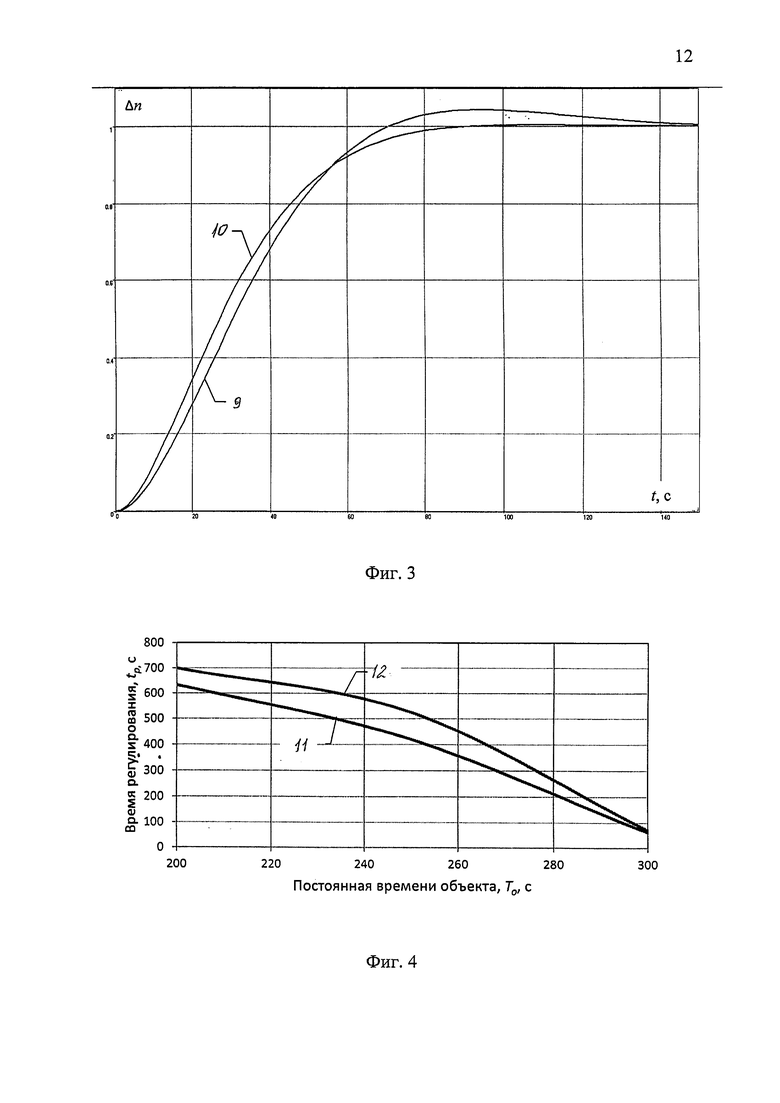
На фиг. 3 приведен график переходного процесса изменения частоты вращения двигателей вентиляторов при отрицательном единичном ступенчатом изменении сигнала на выходе блока задания температуры: кривая 9 для ТЕ=15с, при этом время tp регулирования составляет 62с, а перерегулирование равно 4,3%; кривая 10 - для ТЕ=10с, в этом случае время регулирования - 66с, а перерегулирование равно нулю. Таким образом, вариации постоянной времени ТЕ несущественно влияют на показатели качества переходного процесса. Время регулирования для рассматриваемого переходного процесса в предлагаемой системе, как показывает анализ, примерно на 5%-10% меньше, чем в известной системе.
При изменении внешних условий работы системы, прежде всего температуры наружного воздуха, постоянная времени процесса теплообмена в теплообменнике может изменяться. На основе моделирования исследовано влияние вариаций постоянной времени To процесса теплообмена в теплообменнике на время регулирования. По результатам исследования на фиг. 4 построены графики зависимости времени регулирования tp от значения постоянной времени To процесса теплообмена в теплообменнике: кривая 11 для предлагаемой системы; кривая 12 - для известной системы. Перерегулирование в известной и предлагаемой системе при этом не превышает 5%. Как следует из приведенных графиков, вариации времени регулирования в рассматриваемой системе меньше, чем в исходной.
Показатели качества регулирования температуры на выходе аппарата воздушного охлаждения газа в предлагаемой системе управления аппаратом воздушного охлаждения газа при изменении сигнала блока задания температуры и действии возмущения, как показывает анализ, аналогичны соответствующим показателям в известной системе.
Таким образом, предлагаемая система управления аппаратом воздушного охлаждения газа позволяет обеспечить требуемые показатели качества регулирования и упростить ее настройку за счет уменьшения количества настраиваемых параметров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления аппаратом воздушного охлаждения газа | 2016 |
|
RU2669444C1 |
| Система автоматического управления аппаратом воздушного охлаждения природного газа | 2018 |
|
RU2684767C1 |
| СИСТЕМА УПРАВЛЕНИЯ АППАРАТОМ ВОЗДУШНОГО ОХЛАЖДЕНИЯ МАСЛА | 2012 |
|
RU2487290C1 |
| СИСТЕМА УПРАВЛЕНИЯ АППАРАТОМ ВОЗДУШНОГО ОХЛАЖДЕНИЯ МАСЛА | 2012 |
|
RU2525040C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АППАРАТОМ ВОЗДУШНОГО ОХЛАЖДЕНИЯ МАСЛА | 2013 |
|
RU2532090C2 |
| СИСТЕМА УПРАВЛЕНИЯ АППАРАТАМИ ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2006 |
|
RU2330993C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АППАРАТАМИ ВОЗДУШНОГО ОХЛАЖДЕНИЯ ПРИРОДНОГО ГАЗА | 2023 |
|
RU2807138C1 |
| СИСТЕМА УПРАВЛЕНИЯ АППАРАТАМИ ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2009 |
|
RU2397372C1 |
| Устройство для энергосберегающего управления воздушными и тепловыми потоками тягодутьевого механизма промышленного котлоагрегата | 2017 |
|
RU2707097C2 |
| СИСТЕМА УПРАВЛЕНИЯ АППАРАТАМИ ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2012 |
|
RU2532536C2 |
Изобретение относится к аппаратам воздушного охлаждения газа и может использоваться для охлаждения газа после компримирования на компрессорных станциях магистральных газопроводов. Система управления аппаратом воздушного охлаждения газа содержит блок задания температуры, первый регулятор, частотный преобразователь, асинхронные двигатели, вентиляторы, теплообменник и датчик температуры. Выход первого регулятора соединен со входом частотного преобразователя, выход частотного преобразователя подключен к асинхронным электродвигателям, кинематически связанным с вентиляторами, воздействующими потоком воздуха на теплообменник. Система снабжена вторым регулятором, выполненным в виде пропорционально-дифференциального регулятора, вход второго регулятора соединен с выходом датчика температуры, его выход подключен ко второму входу первого регулятора, выход блока задания температуры соединен с первым входом первого регулятора. Первый регулятор выполнен в виде интегрального регулятора. Изобретение направлено на улучшение динамических характеристик и упрощение настройки системы. 4 ил.
Система управления аппаратом воздушного охлаждения газа, содержащая блок задания температуры, первый регулятор, частотный преобразователь, асинхронные двигатели, вентиляторы, теплообменник и датчик температуры, причем выход первого регулятора соединен со входом частотного преобразователя, выход частотного преобразователя подключен к асинхронным электродвигателям, кинематически связанным с вентиляторами, воздействующими потоком воздуха на теплообменник, отличающаяся тем, что она дополнительно снабжена вторым регулятором, выполненным в виде пропорционально-дифференциального регулятора, причем вход второго регулятора соединен с выходом датчика температуры, его выход подключен ко второму входу первого регулятора, выход блока задания температуры соединен с первым входом первого регулятора, при этом первый регулятор выполнен в виде интегрального регулятора, его постоянная времени выбирается по соотношению TR1=2kokEkDTE, где ko, kD - коэффициенты передачи теплообменника датчика температуры, kE, ТЕ - коэффициент передачи и постоянная времени частотного преобразователя совместно с электродвигателями, соответственно, а постоянная времени дифференцирующего преобразования пропорционально-дифференциального регулятора выбирается равной расчетному значению постоянной времени теплообменника.
| СИСТЕМА УПРАВЛЕНИЯ АППАРАТАМИ ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2006 |
|
RU2330993C2 |
| Устройство для автоматического регулирования теплообменного аппарата воздушного охлаждения | 1988 |
|
SU1663380A1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| DE 10237415 A1, 04.03.2004. | |||

