Изобретение относится к вентиляторным установкам переменной производительности и может быть использовано в системах транспортировки газа и энергетических установках, где требуется охлаждение теплообменников воздухом для поддержания требуемой температуры охлаждаемой среды.
Известна система управления производительностью вентиляторов для охлаждения теплообменников аппаратом воздушного охлаждения (АВО), содержащая регулируемый вентилятор с электродвигателем постоянной частоты вращения, устройство позицирования лопастей рабочего колеса, датчик температуры охлаждаемой среды (см. патент РФ №2183290, 2000 г.). Недостатком известной системы является сложность механической системы для изменения положения лопастей рабочего колеса и ее чувствительность к отказам.
Наиболее близкой к заявленной системе является система частичного (дискретного) отключения работающих вентиляторов аппаратов воздушного охлаждения, содержащая блок управления, датчик температуры охлаждаемой среды, вентиляторы с электродвигателем, группу теплообменников (см. книгу «Эксплуатация газопроводов Западной Сибири», Л.: Недра, стр.152). Недостатком этой системы является низкая точность поддержания температуры охлаждаемой среды, работа на режимах максимальной мощности и возникновение зон рециркуляции воздуха при отключении отдельных АВО, которые вызывают дополнительные потери электроэнергии.
Указанные недостатки известных систем наиболее ярко проявляются при их использовании для охлаждения газа на выходе из компрессорных станций. Из-за возникновения у теплообменников зон рециркуляции воздуха и работы электродвигателей на максимальной частоте вращения увеличивается их энергопотребление. Частые отключения / включения электродвигателей для обеспечения требуемой температуры газа приводят к преждевременной выработке их ресурса. При включении АВО возникают повышенные забросы тока, что требует установки дорогостоящих систем плавного пуска и др.
Технический результат, достигаемый изобретением, заключается в экономии электрической энергии для охлаждения, увеличении ресурса используемого оборудования, обеспечении отказоустойчивости системы управления и гибкости изменения алгоритмов управления для обеспечения требуемого качества регулирования температуры охлаждаемой среды.
Указанный результат достигается тем, что в системе управления аппаратами воздушного охлаждения, содержащей регулятор и датчик температуры охлаждаемой среды, вентиляторы с приводом, группу теплообменников, трубопроводы подвода к ним охлаждаемой среды и ее отвода в коллектор, из которого охлажденная среда поступает в отводящий трубопровод, согласно изобретению приводы имеют устройство изменения их частоты вращения, на вход которых поступает сигнал с выхода регулятора температуры, на первый вход регулятора поступает сигнал с датчика температуры, а на второй вход - сигнал о требуемой температуре охлаждаемой среды, в качестве привода вентиляторов используются асинхронные электродвигатели, частота вращения которых изменяется устройством в виде преобразователя частоты тока питающей электродвигатели сети.
Указанный результат достигается также и тем, что регулятор температуры имеет зону нечувствительности, пропорциональный, интегрирующий и дифференцирующий контуры, а датчик температуры охлаждаемой среды устанавливается в отводящем трубопроводе.
Указанный результат достигается также еще и тем, что устанавливается датчик температуры окружающей среды, сигнал с которого поступает на третий вход регулятора температуры.
Указанный результат достигается еще и тем, что для каждого привода устанавливается корректор задаваемой частоты его вращения, на вход которого поступает сигнал с датчика температуры охлаждаемой среды, установленного на выходе соответствующего теплообменника, а сигнал с выхода корректора суммируется с выходным сигналом регулятора.
На чертеже приведена структурная схема системы автоматического управления аппаратами воздушного охлаждения (САУ АВО).
Объектом управления для САУ АВО является группа теплообменников из «n» штук - l1, l2, ..., ln. На чертеже теплообменники установлены параллельно, но они могут быть расположены параллельно-последовательно и иметь несколько вентиляторов. На вход теплообменников подводится охлаждаемая среда (воздух, масло и т.п.). После ее охлаждения воздухом, подаваемого вентиляторами 21, 22, ..., 2n, она по трубопроводам 3 (31, 32, ..., 3n) поступает в коллектор 6, где перемешивается, и со средней температурой поступает в отводящий трубопровод 8. Вращение каждого из вентиляторов 21, 22, ..., 2n обеспечивает соответствующий привод 4 (асинхронный электродвигатель) с устройством 5 изменения его частоты вращения, которое выполнено в виде преобразователя частоты тока питающей электродвигатели сети с напряжением Uc.
Измерение температуры охлаждаемой среды производится датчиком 7, установленным в отводящем трубопровода 8. Сигнал с датчика 7 поступает на первый вход (1 вх.) регулятора температуры 10, на второй (2 вх.) - сигнал о требуемой температуре охлаждаемой среды, а на третий - сигнал с датчика температуры окружающей среды. Регулятор 10 имеет зону нечувствительности 17, пропорциональный 12, интегрирующий 13 и дифференцирующий 14 контуры. Он вырабатывает для всех приводов сигнал, пропорциональный требуемому в данный момент времени значению частоты вращения fзад, который поступает на первый вход сумматоров 201, 202, ..., 20n. На их второй вход поступает сигнал Δfi с соответствующего корректора 19. Сумматоры 201, 202, ..., 20n производят коррекцию значения частоты вращения приводов fзад в зависимости от сигналов с датчиков температуры охлаждаемой среды 211, 212, ..., 21n, которые установлены в трубопроводах 31, 32, ..., 3n на выходе теплообменников 11, 12, ..., 1n. Результирующий сигнал с выхода сумматоров 20 поступает на вход соответствующих устройств 51, 52, ..., 5n, которые изменяют величину частоты вращения приводов.
Функционирование САУ ABO при поддержании температуры охлаждаемой среды в трубопроводе 8 происходит следующим образом. Требуемое значение температуры (Тзад) поступает на 2-й вход регулятора 10, например, от системы управления высшего уровня. С датчика 7 на 1-й вход регулятора 10 поступает сигнал о фактической температуре охлаждаемой среды. Блок 11 определяет величину отклонения фактической температуры от заданного значения - сигнал рассогласования ΔT, который поступает на вход блоков 12, 13, 14 (контуров регулирования). Для уменьшения рассогласования ΔT блок 16 формирует сигнал коррекции частоты вращения приводов Δfk. В блоке 12 рассчитывается пропорциональная часть Δfk (произведение коэффициента Кп на ΔT), в блоке 13 - интегрирующая (произведение Ки на интеграл ∫ΔTdt), а в 14 - дифференцирующая (произведение Кд на производную dΔT/dt). С датчика 9 на 3-й вход регулятора 10 и далее в блок 15 поступает сигнал о температуре окружающего воздуха для коррекции величины Δfk, например, изменением величин Кп, Ки, Кд или эквидистантным сдвигом Δfk. Из блока 16 результирующий сигнал Δfk поступает в блок 17, реализующий зону нечувствительности, и далее в блок 18, где рассчитывается новое значение заданной частоты вращения приводов fзад, равное сумме предыдущего ее значения и значения Δfk. При необходимости, значение fзад может ограничиваться максимальным и минимальным значениями, а также ограничиваться скорость изменения fзад. Блок 17 (зона нечувствительности) может располагаться и/или за блоком 11.
Сигнал, пропорциональный fзад, поступает на первый вход всех сумматоров 201, 202, ..., 20n, на второй их вход - величина корректирующего сигнала ±Δfi, а с выхода сумматоров - откорректированное значение fзад поступает на устройства 5 (51, 52, ..., 5n) изменения частоты вращения приводов. Величина сигнала ±Δfi определяется по показаниям датчиков 21 в блоке 19. Этот сигнал позволяет устанавливать факт неодинакового теплосъема с теплообменников из-за разной величины протекающего через них расхода охлаждаемой среды или из-за изменения величин коэффициентов теплопередачи.
Устройства 5 (частотные преобразователи с внутренней обратной связью по частоте вращения) реализуют новое значение частоты вращения приводов 41, 42, ..., 4n, и все вентиляторы 2 вращаются с одинаковой частотой вращения, близкой к fзад, обеспечивая однонаправленный поток воздуха через все вентиляторы. При положительном значении ΔT устройства 5 увеличивают частоту вращения вентиляторов и, следовательно, увеличивается подача воздуха на теплообменники (увеличивается величина охлаждающего теплового потока), а при отрицательном ΔT - уменьшают. Это приводит к уменьшению / увеличению температуры за теплообменниками 11, 12, ..., 1n, а после смешения в коллекторе 6 потоков охлаждаемой среды из трубопроводов 3 - и в трубопроводе 8. Процесс будет продолжаться до тех пор, пока заданное и фактическое значение температуры охлаждаемой среды в отводящем трубопроводе 8 не сравняются, при этом величина рассогласования ΔT станет равной нулю или близкой к нулю при другой частоте вращения приводов.
Характерной особенностью работы данной системы управления является уменьшение потребляемой электродвигателями мощности при уменьшении частоты вращения (ωв) всех «n» вентиляторов даже по сравнению с дискретной системой управления, в которой часть вентиляторов отключается, а «m» оставшихся работают на максимальной частоте вращения ωмах. Для поддержания той же температуры охлаждаемой среды подача вентиляторами воздуха в этих системах должна быть одинакова, а т.к. подача пропорциональна частоте вращения, то nωв/λ=mωмах и ωв=ωмахλm/n, где λ<1 - коэффициент изменения теплопередачи «воздух-охлаждаемая среда» при изменении отношения скоростей потоков воздуха и охлаждаемой среды. Для качественной оценки примем λ=1, а так как при поддержании постоянной частоты вращения электродвигателей их мощность пропорциональна кубу частоты вращения (N=кω3), то отношение мощностей систем равно nк(ωмахm/n3)/(mкω3 мах)=(m/n)2. Т.е. несмотря на большее число работающих вентиляторов в данной системе, из-за их работы на более низких частотах вращения потребляемая электродвигателями мощность уменьшается, т.к. m<n и (m/n)2<<1.
Полученные соотношения для потребляемой электродвигателями мощности показывают, что наиболее эффективная работа системы управления имеет место при одновременном уменьшении частот вращения всех вентиляторов, что и обеспечивает регулятор 10, выдавая один и тот же сигнал fзад на устройства 5. Как известно, ресурс электродвигателей увеличивается при их работе на меньших частотах вращения, что и реализуется в данной системе управления.
Изменяя величину коэффициентов Кп, Кд, Ки и/или отключая отдельные блоки формирования величины сигнала Δfk (соответствующий коэффициент Кп, Кд, Ки равен нулю), обеспечивается требуемое качество регулирования температуры охлаждаемой среды. Наличие в регуляторе зоны нечувствительности для корректирующего сигнала Δfk (блок 17) позволяет исключить его флуктуации и, в конечном итоге, исключить паразитные знакопеременные колебания частоты вращения приводов, снижающие ресурс электродвигателей.
Введение в регулятор 10 с датчика 9 температуры окружающего воздуха позволяет упреждающе корректировать величину Δfk. Например, при той же величине отрицательного значения ΔT, когда требуется уменьшить частоту вращения вентиляторов для снижения теплового потока вентиляторов, уменьшение температуры воздуха обеспечивает увеличение теплосъема и величину Δfk можно уменьшить. Это приведет к сокращению длительности переходных процессов по температуре рабочей среды.
Замер датчиками 21 температуры охлаждаемой среды за теплообменниками Ti позволяет использовать эти показания в качестве диагностического признака деградации характеристик теплообменников (засорения межтубных каналов для прохождения воздуха и т.п.) и проводить выравнивание температур Ti для сокращения времени переходных процессов по температуре в трубопроводе 8. Например, при температуре Ti выше требуемого значения блок коррекции 19 определяет величину поправки +Δfi, которая поступает в сумматор 20 и частота вращения fзад увеличивается. Величина поправки может ограничиваться.
Как правило, величина расхода охлаждаемой среды через теплообменники и ее температура на входе в теплообменники отличаются незначительно и увеличение температуры за i-тым теплообменником выше допустимой величины свидетельствует о деградации коэффициентов теплопередачи и необходимости проведения регламентных работ. Средняя температура рабочей среды по датчикам 21 может использоваться в качестве резервной для регулятора температуры при отказе датчика 7. Это обеспечивает отказоустойчивость системы управления.
Таким образом, использование в системе управления АВО преобразователей частоты тока питающей сети для изменения частоты вращения электродвигателей, регулятора температуры охлаждаемой среды, имеющего зону нечувствительности, перенастриваемые пропорциональный, интегрирующий и дифференцирующий контура, датчиков температуры окружающего воздуха и охлаждаемой среды в отводящем трубопроводе и на выходе теплообменников обеспечивает при регулировании температуры охлаждаемой среды экономию электроэнергии из-за работы электродвигателей на пониженных частотах вращения, увеличивается их ресурс, обеспечивается отказоустойчивость системы и гибкость изменения алгоритмов для обеспечения требуемого качества регулирования температуры охлаждаемой среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ АППАРАТАМИ ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2009 |
|
RU2397372C1 |
| СИСТЕМА УПРАВЛЕНИЯ АППАРАТАМИ ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2012 |
|
RU2532536C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С МЕХАНИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2492335C2 |
| ВОЗДУШНЫЙ ОХЛАДИТЕЛЬ НАДДУВОЧНОГО ВОЗДУХА В ДВИГАТЕЛЯХ ВНУТРЕННЕГО СГОРАНИЯ | 2019 |
|
RU2716649C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С РЕГЕНЕРАЦИЕЙ ТЕПЛА | 2013 |
|
RU2531460C1 |
| Система управления аппаратом воздушного охлаждения газа | 2016 |
|
RU2690541C2 |
| СИСТЕМА ОХЛАЖДЕНИЯ БОРТОВОЙ АППАРАТУРЫ ПОДВЕСНОГО АВИАЦИОННОГО ОПТИКО-ЭЛЕКТРОННОГО КОНТЕЙНЕРА | 2010 |
|
RU2429994C1 |
| Система автоматического управления аппаратом воздушного охлаждения газа | 2016 |
|
RU2669444C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С РЕГЕНЕРАЦИЕЙ ТЕПЛА | 2013 |
|
RU2527229C1 |
| КОМПРЕССОРНАЯ УСТАНОВКА | 2013 |
|
RU2535412C2 |
Изобретение относится к вентиляторным установкам переменной производительности и может быть использовано в системах транспортировки газа и энергетических установках, где требуется охлаждение теплообменников воздухом для поддержания требуемой температуры охлаждаемой среды. Технический результат, достигаемый изобретением, заключается в экономии электрической энергии для охлаждения, увеличении ресурса используемого оборудования, обеспечении отказоустойчивости системы управления. Система управления аппаратами воздушного охлаждения содержит регулятор и датчик температуры охлаждаемой среды, вентиляторы с приводом, группу теплообменников, трубопроводы подвода к ним охлаждаемой среды и ее отвода в коллектор, из которого охлажденная среда поступает в отводящий трубопровод. Приводы имеют устройство изменения их частоты вращения, на вход которых поступает сигнал с выхода регулятора температуры, на первый вход регулятора поступает сигнал с датчика температуры, а на второй вход - сигнал о требуемой температуре охлаждаемой среды, при этом в качестве привода вентиляторов используются асинхронные электродвигатели, частота вращения которых изменяется устройством в виде преобразователя частоты тока питающей электродвигатели сети. 3 з.п. ф-лы, 1 ил.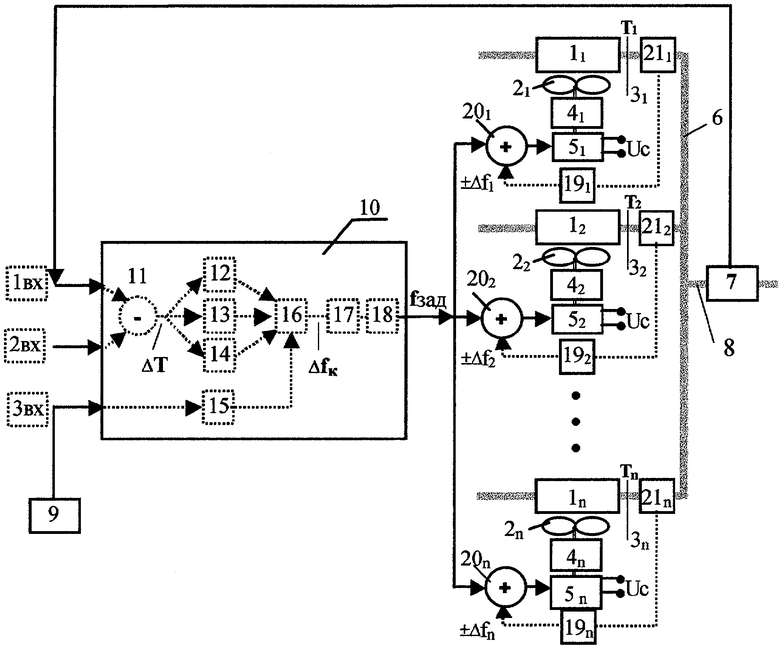
| Устройство для автоматического регулирования теплообменного аппарата воздушного охлаждения | 1988 |
|
SU1663380A1 |
| Система кондиционирования воздуха | 1990 |
|
SU1809256A1 |
| Устройство для регулирования температуры | 1989 |
|
SU1798771A1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| DE 10237415 А, 04.03.2004. | |||

