Изобретение относится к вентиляторным установкам переменной производительности, которая обеспечивается за счет изменения угла наклона лопастей рабочего колеса осевого вентилятора при его остановке или во время вращения, и может быть использовано в вентиляторных аппаратах воздушного охлаждения (АВО) в химической промышленности, нефтеперерабатывающей, газодобывающей, газотранспортирующей отраслях и в других, т.е. там, где требуется обеспечение постоянства температуры охлаждаемой среды независимо от температуры охлаждающей.
Осевые вентиляторы с регулированием производительности охлаждающего воздуха путем изменения угла наклона лопастей его рабочего колеса в технике известны. В частности, известны вентиляторы, позволяющие осуществить одновременное одинаковое изменение угла наклона всех лопастей его рабочего колеса как при остановке последнего, так и при его вращении [1]. Основным элементом конструкции регулируемого колеса осевого вентилятора является литая ступица, в радиальные гнезда которой на подшипниках вставлены валы. На одном конце каждого вала жестко крепится лопасть, а на противоположном закреплен рычаг с пальцем, входящим в кольцевой паз водила, связанного с механизмом его возвратно-поступательного перемещения вдоль оси ступицы колеса, которое упомянутыми рычагами с пальцами преобразуется во вращательное движение валов, несущих лопасти колеса. Этим и обеспечивается одновременный поворот всех лопастей. При остановленном рабочем колесе осевого вентилятора поворот лопастей осуществляется поворотом гайки винта механизма поворота, связанного с водилом, обеспечивая поступательное движение винта и водила и требуемый поворот лопастей колеса. При помощи дистанционного механизма поворота лопастей установить требуемый угол наклона лопастей рабочего колеса осевого вентилятора можно без его остановки - "на ходу" или после кратковременной остановки. Дистанционный механизм поворота лопастей включает червячно-винтовой подъемник, закрепленный на ступице рабочего колеса, регулятор, вынесенный за диффузор и снабженный маховиком и шкалой, и промежуточный вал, соединяющий регулятор с червячно-винтовым подъемником. Поворотом маховика регулятора через промежуточный вал приводится во вращательное движение червячная пара подъемника, сообщающая поступательное перемещение винту, связанному с водилом. Контроль угла наклона лопастей колеса вентилятора производят по шкале регулятора. Вместо указанного регулятора в дистанционном механизме поворота лопастей может быть установлен электропривод с маховиком его ручного дублирования и шкалой местного указателя угла поворота. Это позволит осуществлять ручное местное и дистанционное автоматическое управление режимом работы вентилятора. Однако по ряду объективных причин основным механизмом поворота лопастей при дистанционном автоматическом управлении углом их наклона является пневматический привод. Пневматический механизм поворота лопастей включает закрепленную на ступице колеса вентилятора подпружиненную мембрану, связанную с водилом, и пневматический механизм. Давление сжатого воздуха, действующего на мембрану, вызывает ее прогиб при одновременном сжатии пружины и соответствующем поступательном перемещении водила, которое при помощи указанных ранее рычагов с пальцами преобразуется во вращательное движение несущих лопасти валов. При отсутствии в системе сжатого воздуха пружина возвращает лопасти в первоначальное положение, которое может соответствовать как минимальному, так и максимальному углу их наклона. Для улучшения качества регулирования работы пневматического механизма в его конструкции предусмотрена возможность применения позиционеров.
Такая конструкция регулируемого рабочего колеса осевого вентилятора является "навесной" и может устанавливаться непосредственно на вал привода (электромотора) или выходной вал редуктора. Однако она имеет ряд существенных недостатков, одним из которых является жесткое требование по соосности вращающихся масс рабочего колеса на шпинделе и неподвижной (опорной) части, связанной с диффузором. Применение пневмопривода рычагов поворота лопастей регулируемого рабочего колеса осевого вентилятора не обеспечивает необходимой жесткости положения лопастей, т. к. пневмопривод работает как пружина переменной жесткости, что приводит к осевой "игре" лопастей, что особенно недопустимо при параллельной работе двух и более вентиляторов в одном АВО.
Изобретение решает техническую задачу обеспечения надежного и четкого позиционирования (установки) углов наклона лопастей рабочего колеса вентилятора и автоматического управления их установкой в системе синхронной связи с датчиками температуры охлаждаемой среды. Кроме того, изобретение позволяет использовать высокооборотные двигатели в качестве привода рабочего колеса вентилятора.
Решение указанной технической задачи обеспечивается тем, что в регулируемом вентиляторе АВО, содержащем установленное по оси диффузора рабочее колесо, включающее ступицу, в радиальных гнездах которой на подшипниках установлены валы с жестко закрепленной на конце каждого из них лопастью рабочего колеса и снабженные каждый рычагом поворота, взаимодействующим с водилом механизма поворота лопастей, при этом ступица рабочего колеса жестко закреплена на выходном валу редуктора, кинематически связанном с приводом вращения рабочего колеса, в соответствии с данным изобретением механизм поворота лопастей рабочего колеса вентилятора включает роликовинтовую передачу, размещенную внутри выходного вала редуктора, выполненного полым, гайка роликовой передачи связана с полым выходным валом редуктора шлицами (шпонкой) по ходовой посадке и снабжена ведущей штангой, проходящей по оси отверстия выходного вала редуктора и выступающей над закрепленной на нем ступицей рабочего колеса вентилятора по меньшей мере на величину рабочего хода водила механизма поворота лопастей, в качестве которого на конце ведущей штанги закреплена крестовина, концы каждой ветви которой шарнирно соединены с отдельным шатуном, шарнирно соединенным своим вторым концом с рычагом поворота вала одной из лопастей рабочего колеса вентилятора, при этом винт роликовинтовой передачи соединен с водилом дифференциального планетарного механизма, коронное колесо этого механизма дополнительно снабжено внешним зубчатым венцом червячного колеса червячной передачи, червяк которой соединен с приводом механизма поворота лопастей рабочего колеса вентилятора, например с электрическим реверсивным двигателем, а центральное колесо дифференциальной планетарной передачи через систему зубчатых шестерен связано с приводным валом редуктора, причем передаточные отношения "приводной вал редуктора - выходной вал редуктора" и "приводной вал редуктора - водило дифференциального планетарного механизма" равны по величине и направлению.
Решению указанной технической задачи способствует также и то, что червяк упомянутой передачи механизма поворота лопастей рабочего колеса вентилятора промежуточным валом соединен с дополнительной передачей, например червячной (зубчато-винтовой, косозубой), установленной на боковой стенке корпуса редуктора привода вращения рабочего колеса вентилятора с внешней ее стороны в отдельном отсеке, вал червячного колеса которой кинематически связан с подвижным контактом переменного резистора и с ползуном, последовательно взаимодействующим с пакетом (блоком) микропереключателей, расположенных последовательно в пределах рабочего хода ползуна с интервалом, пропорциональным углу поворота лопастей рабочего колеса вентилятора, а крайние микропереключатели одновременно являются конечными выключателями, при этом переменный резистор и микропереключатели блока включены в соответствующие электрические цепи систем регистрации и/или систем автоматического управления приводом механизма поворота лопастей рабочего колеса вентилятора. Ползун, последовательно взаимодействующий с пакетом (блоком) микропереключателей, может быть выполнен в виде ходовой гайки, установленной по резьбе на части вала червячного колеса упомянутой дополнительной передачи по одну сторону колеса, которая выполнена в виде винта, при этом ходовая гайка установлена в направляющих, исключающих ее поворот вокруг оси.
Повышение эффективности решения поставленной технической задачи обеспечивается тем, что приводной вал дополнительной передачи - червяк кинематически связан с маховиком дублирующего ручного привода механизма поворота лопастей рабочего колеса вентилятора, установленным с внешней стороны наружной боковой стенки отдельного отсека. При этом на ходовой гайке-ползуне может быть закреплена стрелка-указатель положения (угла поворота) лопастей рабочего колеса вентилятора, конец которой через прорезь в наружной боковой стенке отдельного отсека, выполненную по всей длине рабочей части винта, выведен наружу, а на самой стенке отдельного отсека с внешней ее стороны закреплена шкала, отградуированная в соответствующих единицах. Стрелка и шкала могут быть закрыты пластиной из прозрачного материала, например из стекла, закрепленного на самой стенке отдельного отсека.
Действительно, предложенное конструктивное выполнение механизма поворота лопастей рабочего колеса вентилятора и параметров кинематической связи водила дифференциальной планетарной передачи с приводным валом редуктора, передающим вращение его выходному валу с рабочим колесом вентилятора, обеспечивает синхронное вращение гайки и винта жесткой роликовинтовой передачи и исключает осевую игру водила механизма поворота лопастей (колебания положения последнего), т. е. обеспечивает сохранение установленного угла наклона лопастей рабочего колеса вентилятора независимо от скорости его вращения (жесткое позиционирование). Кроме того, обеспечивается поворот лопастей рабочего колеса вентилятора с высокой точностью и надежностью установки требуемого угла их наклона как при вращении рабочего колеса, так и после его остановки, и необходимая жесткость фиксации положения лопастей после требуемой их установки.
Повышению эффективности решения поставленной технической задачи способствует установка дополнительной передачи, связанной через червяк червячной передачи механизма поворота лопастей рабочего колеса вентилятора с приводом их поворота и кинематически связанной с подвижным контактом переменного резистора и с ползуном, последовательно взаимодействующим с пакетом микропереключателей, которые включены в соответствующие электрические цепи систем регистрации и/или систем автоматического управления приводом механизма поворота лопастей рабочего колеса вентилятора. Предложенное конструктивное выполнение кинематической связи дополнительной передачи с упомянутым ползуном является одним их возможных вариантов решения этой задачи, который упрощает выполнение местного указателя положения (угла поворота) лопастей рабочего колеса вентилятора. Установка дублирующего ручного привода механизма поворота лопастей рабочего колеса вентилятора позволяет выполнять эту операцию на месте его установки как при вращающемся рабочем колесе, так и после его остановки без включения электродвигателя привода поворота.
Таким образом, предложенный в соответствии с данным изобретением регулируемый вентилятор обеспечивает решение поставленной технической задачи.
Наличие у заявляемого устройства указанных выше отличительных признаков по сравнению с прототипом обеспечивает его соответствие критерию изобретения "новизна". Отсутствие сведений об известности использования отличительных признаков заявляемого объекта в этой же или в смежных областях техники для решения аналогичных задач позволяет признать его соответствующим критерию "изобретательский уровень", а отсутствие препятствий технического, технологического или иного порядка для промышленной реализации заявляемого объекта делает его соответствующим критерию изобретения "промышленная применимость".
Следовательно, заявляемый объект отвечает условиям охраноспособности и ему может быть предоставлена патентная защита.
Сущность изобретения поясняют приводимые ниже описание конкретных примеров его осуществления, что, однако, не исключает и другие возможные варианты его реализации в рамках заявляемой формулы изобретения, и чертежи, на которых представлены:
- на фиг.1 - заявляемый регулируемый вентилятор АВО, вид в плане с частичными горизонтальными разрезами по оси выходного вала редуктора привода вращения рабочего колеса и по оси червячного колеса дополнительной червячной передачи, поясняющими один из возможных вариантов конструктивного выполнения основных узлов и их взаимное расположение;
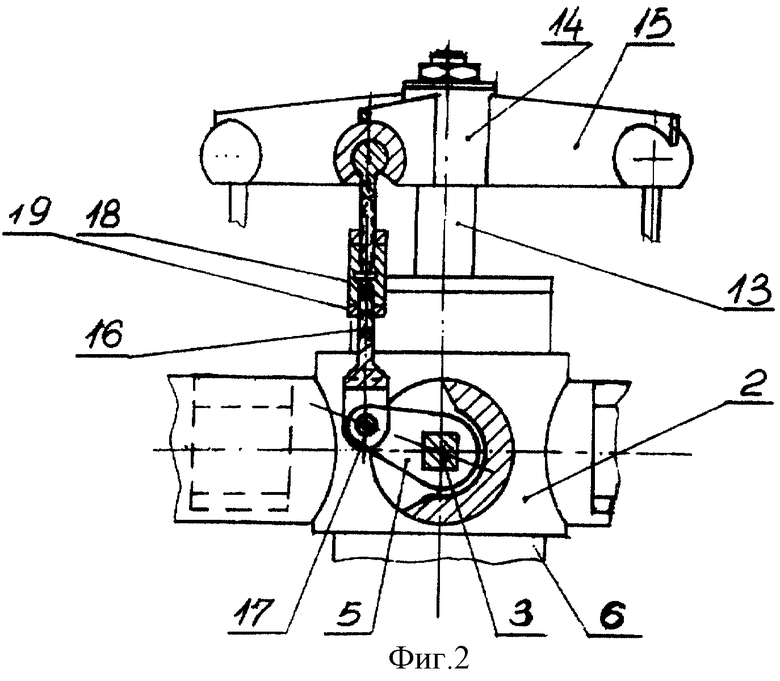
- на фиг. 2 - разрез А-А по фиг.1 (увеличено), поясняющий вариант конструктивного выполнения отдельных элементов ступицы рабочего колеса и механизма поворота его лопастей, их взаимное расположение;
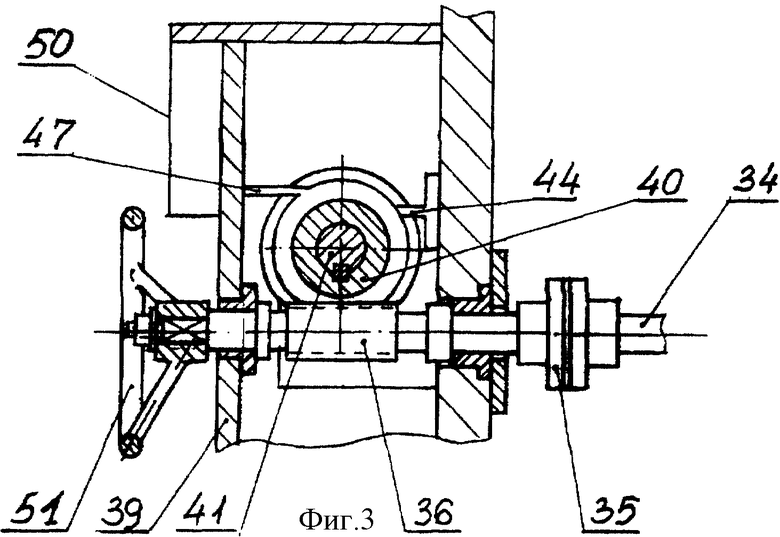
- на фиг. 3. - разрез Б-Б по фиг.1 (увеличено), поясняющий вариант конструктивного выполнения элементов дополнительной передачи и установки дублирующего ручного привода механизма поворота лопастей рабочего колеса вентилятора;
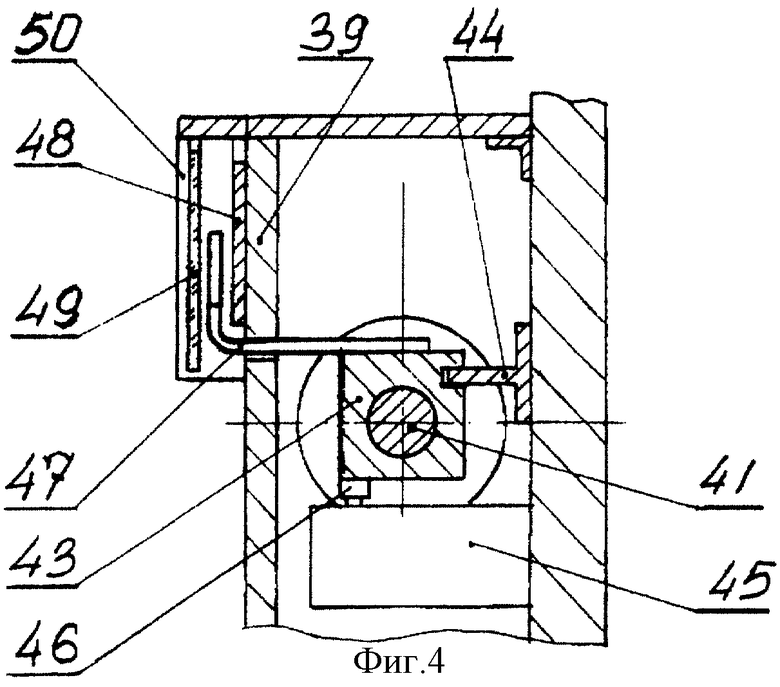
- на фиг. 4 - разрез В-В по фиг.1 (увеличено), поясняющий один из возможных вариантов конструктивного выполнения ползуна, последовательно взаимодействующего с микропереключателями блока, расположенного под ним и связанного с местным указателем положения (угла наклона) лопастей рабочего колеса вентилятора.
Как и известные аналогичные устройства, заявляемый регулируемый вентилятор содержит установленное по оси диффузора 1 рабочее колесо, содержащее ступицу 2, в радиальных гнездах которой на подшипниках размещены валы 3 с жестко закрепленной на конце каждого из них лопастью 4 и снабженные рычагом 5 (см. фиг.1 и фиг.2), взаимодействующими с водилом механизма поворота лопастей 4. Ступица 2 установлена на выходном валу 6 редуктора, на котором закреплено зубчатое колесо 7, входящее в зацепление с шестерней 8 на приводном валу 9, соединенным с высокооборотным электродвигателем 10 посредством муфты 11. В отличие от известных аналогичных устройств, в том числе и от прототипа [1] , в заявляемом регулируемом вентиляторе механизм поворота лопастей 4 рабочего колеса включает роликовинтовую передачу, размещенную внутри выходного вала 6 редуктора, выполненного полым. Гайка 12 роликовинтовой передачи связана с полым выходным валом 6 шлицами по ходовой посадке, снабжена ведущей штангой 13, проходящей по оси отверстия выходного вала 6, и выступает над закрепленной на нем ступицей 2 рабочего колеса (в конце рабочего хода механизма поворота лопастей 4) по меньшей мере на величину рабочего хода водила, в качестве которого на конце ведущей штанги 13 закреплена крестовина 14. Концы каждой ветви 15 крестовины 14 шарнирно соединены с отдельным шатуном 16, которые вторым концом шарнирно соединены с одним из рычагов 5 поворота вала 3 лопасти 4. Целесообразно соединение концов ветвей 15 крестовины 14 с шатуном 16 выполнить шаровым шарниром (например, типа Ш или ШС - см. фиг.2). Соединение второго конца шатуна 16 с рычагом 5 поворота вала 3 может быть выполнено с помощью пальца 17. Однако в этом узле могут быть использованы шарнирные соединения и других типов.
Для упрощения регулировок при сборке вентилятора и обеспечения необходимой точности установки одинакового положения (угла наклона) всех лопастей 4 рабочего колеса шатуны 16 могут быть изготовлены из двух частей каждый с резьбой разного направления на соединяемых концах. В этом случае соединение концов частей шатуна 16 может быть выполнено с помощью втулки 18, имеющей на противоположных торцах резьбу разного направления (левую и правую), а фиксация взаимного положения обеих частей шатуна 16 и втулки 18 может быть обеспечена контргайками 19. Винт 20 роликовинтовой передачи от осевых смещений зафиксирован с помощью двойного упорного подшипника 21 и муфтой 22 соединен с валом 23 водила дифференциального планетарного механизма, собранного в отдельном корпусе 24. Коронное колесо 25 дифференциального планетарного механизма дополнительно имеет внешний зубчатый венец 26 червячной передачи, червяк которой (на чертеже не показан) с помощью муфты соединен с валом маломощного реверсивного электродвигателя 27, служащего приводом механизма поворота лопастей 4 рабочего колеса вентилятора.
На приводном валу центрального колеса 28 дифференциального планетарного механизма с внешней стороны корпуса 24 установлены шестерня 29 и муфта 30, соединяющая упомянутый вал с масляным насосом 31. Шестерня 29 с помощью пары паразитных зубчатых колес 32 входит в зацепление с шестерней 33 на приводном валу 9 редуктора, причем передаточные отношения "приводной вал 9 - выходной вал 12 редуктора" и "приводной вал 9 - вал водила 23 дифференциального планетарного механизма" равны по величине и направлению. Червяк червячной передачи, связанной с коронным колесом 25 дифференциального планетарного механизма и служащей приводом механизма поворота лопастей 4 рабочего колеса, промежуточным валом 34 и муфтой 35 соединен с червяком 36 дополнительной червячной передачи, смонтированной с внешней стороны боковой стенки редуктора в отдельном отсеке, образованном закрепленными на боковой стенке редуктора торцевыми стенками 37 и 38 и внешней стенкой 39. Червяк 36 (см. фиг.3) опирается на подшипники, установленные в боковой стенке редуктора и внешней стенке 39. Червячное колесо 40 посажено на вал 41, установленный в подшипниках промежуточного кронштейна 42 и в крышке установочного отверстия в торцевой стенке 37. Часть вала 41 от закрепленного в крышке установочного отверстия в торцевой стенке 37 конца до червячного колеса 40 выполнена в виде винта и на нем установлена ходовая гайка 43, удерживаемая от проворота вокруг оси направляющей линейкой 44, входящей в паз на боковой стенке гайки 43 и закрепленной на боковой стенке редуктора (см. фиг.4).
Под гайкой 43 в отдельном отсеке установлен блок 45 микропереключателей, расположенных в блоке вдоль рабочей части вала 41 (в виде ходового винта) с промежутками между осями рабочих кнопок микропереключателей в блоке 45, пропорциональными углу поворота лопастей 4 рабочего колеса. Гайка 43 на обращенной к блоку 45 микропереключателей стороне выполнена с выступом 46, последовательно взаимодействующим при ее перемещении с рабочими кнопками микропереключателей, включенных в электрические цепи систем регистрации положения (угла наклона) лопастей 4 рабочего колеса и/или систем автоматического управления приводом механизма поворота лопастей 4 - реверсивного электродвигателя 27. При этом крайние микропереключатели в блоке 45 одновременно являются конечными выключателями и исключают после их срабатывания дальнейшую работу или повторное включение электродвигателя 27 на увеличение или уменьшение угла наклона лопастей 4 сверх установленных значений, обеспечивая только возможность реверса электродвигателя 27.
Для местной регистрации положения (угла наклона) лопастей 4 рабочего колеса вентилятора на гайке 43 может быть закреплена стрелка-указатель 47, конец которой через продольную прорезь в наружной боковой стенке 39 отдельного отсека выведен за пределы этой стенки и отогнут под прямым углом (см. фиг.4). При этом упомянутая прорезь выполнена по всей длине рабочей части вала 41 с винтовой резьбой, а над прорезью на внешней стороне стенки 39 закреплена шкала 48, отградуированная в соответствующих единицах - углах наклона лопастей 4 рабочего колеса вентилятора либо его производительности. Шкала 48 и стрелка 47 могут быть закрыты пластиной 49 из прозрачного материала, например из стекла, установленной в пазах кронштейнов 50, закрепленных на боковой стенке 39 отдельного отсека.
Для осуществления местного управления положением (углом наклона) лопастей 4 рабочего колеса вентилятора при его вращении или после остановки червяк 36 выполнен с хвостовиком, выходящим за пределы наружной боковой стенки 39 отдельного отсека (см. фиг.3), и на нем установлен маховик 51 дублирующего электродвигатель 27 ручного привода механизма поворота лопастей 4. Второй конец вала 41 червячного колеса 40 выведен с противоположной стороны промежуточного кронштейна 42 и на нем закреплена шестерня 52, входящая в зацепление с шестерней 53, шарнирно закрепленной в этом же промежуточном кронштейне 42 под шестерней 52 (см. фиг.1). Ось шестерни 53 соединена с осью переменного резистора 54, связанной с его подвижным контактом. Резистор 54 закреплен в отдельном отсеке, а его контакты включены в электрическую цепь измерительной системы и обеспечивают непрерывное дистанционное отображение (регистрацию) положения лопастей 4 рабочего колеса (угол их наклона).
Приведенное выше описание заявляемого регулируемого вентилятора АВО касается конкретного варианта конструктивного выполнения его основных и вспомогательных узлов и элементов, показанных на прилагаемых чертежах. Однако некоторые из них могут иметь и другое конструктивное выполнение, и другие взаимосвязи. В частности, другой в конструктивном отношении может быть выполнена дополнительная передача, связанная промежуточным валом 34 с червяком червячной передачи механизма поворота лопастей 4. Другими могут быть кинематические связи дополнительной передачи с переменным резистором и с ползуном, последовательно взаимодействующим с микропереключателями блока 45, конструктивное выполнение дублирующего ручного привода механизма поворота лопастей рабочего колеса и местного указания их положения.
Работа заявляемого регулируемого вентилятора АВО в показанном на прилагаемых чертежах варианте конструктивного выполнения его основных и вспомогательных узлов заключается в следующем. При включении привода вентилятора - электродвигателя 10 - вал его через муфту 11 вращает приводной вал 9 с шестернями 8 и 33. От шестерни 8 вращение через зубчатое колесо 7 передается непосредственно выходному валу 6, на котором закреплена ступица 2 рабочего колеса вентилятора с лопастями 4. Одновременно от шестерни 33 через пару паразитных зубчатых колес 32 вращение передается шестерне 29, сидящей на одном валу с центральным колесом 28 дифференциального планетарного механизма. Вращение центрального колеса 28 при неподвижном коронном колесе 25 вызывает вращение сателлитов, связанных с валом 23 водила дифференциальной планетарной передачи. При соблюдении обязательного условия - равных по величине и направлению передаточных отношений "приводной вал редуктора - выходной вал" и "приводной вал редуктора - водило дифференциального планетарного механизма" - скорости вращения вала 23 водила дифференциального планетарного механизма и выходного вала 6 редуктора будут одинаковы. А это значит, что гайка 12 и винт 20 роликовинтовой передачи, входящей в механизм поворота лопастей 4 рабочего колеса вентилятора, будут вращаться в одну сторону с одинаковой скоростью без осевого смещения гайки 12 относительно неподвижного в осевом направлении винта 20 роликовинтовой передачи. При этом производительность вентилятора по подаче охлаждающей среды - воздуха будет определяться заранее установленным углом наклона лопастей 4 рабочего колеса и скорости его вращения.
При необходимости изменения производительности вентилятора по охлаждающей среде для поддержания температуры охлаждаемой среды или объекта в заданном интервале включают привод механизма поворота лопастей 4 рабочего колеса - реверсивный электродвигатель 27, выбирая нужное направление его вращения для достижения поставленной цели. Это может быть сделано с дистанционного пульта управления вручную или с помощью систем автоматического управления, использующих датчики температуры для включения при их срабатывании соответствующих исполнительных устройств в цепи управления питанием реверсивного электродвигателя 27 (электрические схемы систем управления питанием электродвигателя, в том числе и систем автоматического управления, здесь не рассматриваются, поскольку они не являются предметом патентной защиты). При включении электродвигатель 27 приводит во вращение (в соответствующую сторону) червяк червячной передачи, червячное колесо которой образовано внешним зубчатым венцом 26, посаженным на коронное колесо 25 дифференциального планетарного механизма. Вращение червяка указанной передачи привода механизма поворота лопастей 4 рабочего колеса вентилятора вызывает вращение зубчатого венца 26 с коронным колесом 25. В зависимости от направления его вращения скорость вращения вала 23 водила дифференциального планетарного механизма начнет возрастать или уменьшаться, вызывая соответствующее изменение скорости вращения жестко связанного с ним винта 20 роликовинтовой передачи по отношению к гайке 12 этой же передачи, скорость вращения которой не изменяется.
Это изменение относительной скорости вращения винта 20 и гайки 12 роликовинтовой передачи вызовет навинчивание гайки 12 на винт 20 и ее смещение по шлицам внутри полого выходного вала 6 к двойному упорному подшипнику 21 или, напротив, свинчивание гайки 12 с винта 20 и ее смещение в противоположную сторону. Вместе с гайкой 12 такое же смещение внутри полого вала 6 совершит и ведущая штанга 13, связанная с гайкой 12 и несущая на выведенном из полого вала 6 конце жестко закрепленную на нем крестовину 14, концы ветвей 15 которой шарнирно соединены с одним концом шатунов 16. При своем перемещении шатуны 16 через пальцы 17 будут воздействовать на рычаги 5, закрепленные на несущих лопасти 4 рабочего колеса вентилятора валах 3, вызывая их соответствующий поворот вокруг осей установки валов 3 в радиальных гнездах ступицы 2. Это вызовет соответствующее изменение производительности вентилятора по охлаждающей среде и изменение температуры охлаждаемой среды или объекта.
Вращение реверсивного электродвигателя 27 одновременно с вращением червяка червячной передачи привода механизма поворота лопастей 4 рабочего колеса вентилятора вызовет вращение связанного с упомянутым червяком промежуточного вала 34 и соединенного с ним через муфту 35 червяка 36 дополнительной червячной передачи, установленной в отдельном отсеке. При этом будут вращаться закрепленный на хвостовике червяка 36 маховик 51 дублирующего ручного привода механизма поворота лопастей 4 и посаженное на валу 41 червячное колесо 40. Вращение вала 41 через пару зубчатых шестерен 52 и 53 вызовет поворот рычага управления переменного резистора 54, контакты которого включены в электрическую цепь измерительной системы, образующей непрерывное автоматическое слежение за положением (углом наклона) лопастей 4. Одновременно вращение вала 41 преобразуется винтовой его частью в поступательное перемещение ходовой гайки-ползуна 43, зафиксированной от осевого вращения направляющей линейкой 44. При своем перемещении гайка 43 своим выступом 46 последовательно взаимодействует с рабочими кнопками микропереключателей, блок (пакет) 45 которых установлен в отдельном отсеке под гайкой 43 и которые включены в электрические цепи систем регистрации положения (угла наклона) лопастей 4, фиксируя его примерно через равные промежутки, и при необходимости в систему автоматического управления приводом - реверсивным электродвигателем 27 - механизма поворота лопастей 4.
Крайние в блоках 45 микропереключатели осуществляют отключения электродвигателя 27 и исключают его повторное включение без предварительного реверсирования. Следовательно, после поворота лопастей 4 в одно из установленных их крайних положений дальнейшее увеличение или уменьшение угла их наклона практически невозможно. Вместе с гайкой 43 перемещается закрепленная на ней стрелка-указатель 47 местной регистрации положения (угла наклона) лопастей 4 рабочего колеса по шкале 48, которая может быть отградуирована в углах наклона лопастей 4 или величине производительности по охлаждающей среде данного конкретного вентилятора. При необходимости может быть осуществлено местное управление положением (углом наклона) лопастей 4 рабочего колеса вентилятора при его вращении или после кратковременной остановки вращением маховика 51 дублирующего ручного привода механизма поворота лопастей 4. Вращение маховика 51 вызовет вращение червяка 36 дополнительной червячной передачи и описанную выше работу всех связанных с ним элементов и узлов заявляемого вентилятора, размещенных в дополнительном отсеке с внешней стороны корпуса редуктора. Одновременно с червяком 36 начнет вращаться связанный с ним через муфту 35 и промежуточный вал 34 червяк червячной передачи привода механизма поворота лопастей 4 рабочего колеса. При остановленном рабочем колесе вентилятора и неподвижной гайке 12 роликовинтовой передачи механизма поворота лопастей 4 вращение червяка червячной передачи привода механизма поворота лопастей 4 вызовет вращение вала 23 водила дифференциального планетарного механизма и связанного с ним винта 20 роликовинтовой передачи, что вызовет соответствующее перемещение гайки 12 и связанных с ней элементов механизма поворота лопастей 4 рабочего колеса. При вращающемся рабочем колесе вентилятора вращение червяка червячной передачи привода механизма поворота лопастей 4 вызовет описанное ранее изменение скорости вращения вала 23 водила дифференциального планетарного механизма и уже описанную работу механизма поворота лопастей 4 рабочего колеса вентилятора.
Таким образом, заявляемый регулируемый вентилятор аппарата воздушного охлаждения обеспечивает жесткие кинематические связи всех узлов и элементов механизма поворота лопастей рабочего колеса и его привода, возможность ручного местного и дистанционного управления положением (углом наклона) лопастей рабочего колеса, создание автоматического следящего устройства за положением лопастей рабочего колеса и создание автоматической системы управления углом наклона лопастей рабочего колеса вентилятора, например, с помощью датчиков температуры охлаждаемой среды, управляющих исполнительными механизмами.
Источники информации
1. В.М.Шлиркович, С.А.Мухин, В.Е.Вайсман. Регулируемые вентиляторы аппаратов воздушного охлаждения. //Химическое и нефтяное машиностроение. - М., 1978 г., 11, с. 4-6, рис. 2 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ЛОПАСТЕЙ РАБОЧЕГО КОЛЕСА ВЕНТИЛЯТОРА АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ ПОД ЗАДАННЫМ УГЛОМ АТАКИ | 2004 |
|
RU2261371C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672150C1 |
| ЭЛЕКТРОПРИВОД К ЗАДВИЖКАМ ТРУБОПРОВОДОВ | 2001 |
|
RU2218504C2 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| УСТАНОВКА ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ СВАРКИ | 1973 |
|
SU369992A1 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2013 |
|
RU2564157C2 |
| ГРЕБНОЙ ВИНТ РЕГУЛИРУЕМОГО ШАГА | 2002 |
|
RU2236986C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672154C1 |
| МНОГОРЯДНАЯ КЛУБНЕКОРНЕПЛОДОУБОРОЧНАЯ МАШИНА | 1987 |
|
RU2021667C1 |
| "Устройство для обработки трехмерных поверхностей | 1973 |
|
SU485850A1 |
Изобретение относится к вентиляторным установкам переменной производительности и обеспечивает надежное и жесткое позиционирование лопастей рабочего колеса, простоту регулировки, возможность местного, дистанционного и автоматического управления положением лопастей за счет изменения угла их наклона при остановке вентилятора или во время вращения. 4 з.п. ф-лы, 4 ил.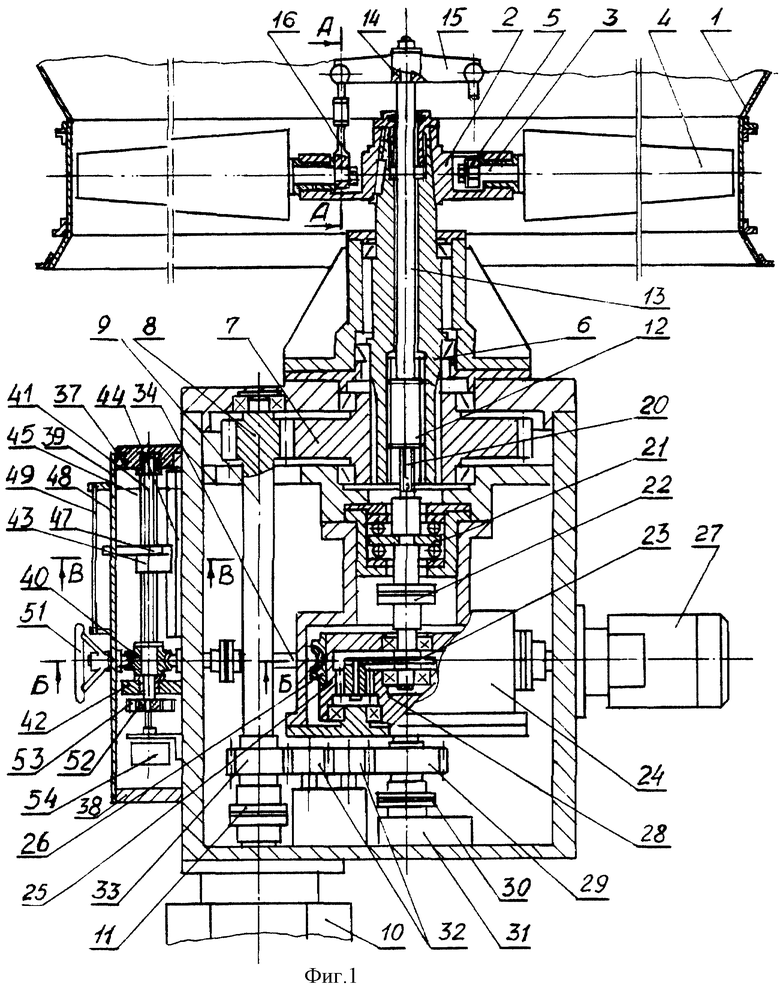
| ШЛИРКОВИЧ В.М., МУХИН С.А., ВАЙСМАН В.Е | |||
| Регулируемые вентиляторы аппаратов воздушного охлаждения | |||
| Химическое и нефтяное машиностроение, 1978, № 11, с.4-6, рис.2 | |||
| БЛОК ВЕНТИЛЯТОРОВ | 1991 |
|
RU2009376C1 |
| Многоступенчатый осевой вентилятор | 1987 |
|
SU1670185A1 |
| Способ выделения хлора из содержащих его газов | 1934 |
|
SU43877A1 |
| GB 1577582 A, 29.10.1980 | |||
| ПНЕВМАТИЧЕСКАЯ ШИНА ДЛЯ ТЯЖЕЛОВЕСНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2528500C2 |

