Изобретение относится к области спорта, а точнее к областям спортивного оборудования и тренажеров.
Локальная система мониторинга местоположения и параметров движения спортсменов и спортивных снарядов может быть использована во время тренировок или соревнований спортсменов как в одиночных, так и в командных видах спорта для определения оптимальности траекторий и параметров движения спортсменов, в том числе, относительно траекторий спортивных снарядов (мяча, шайбы и т.п.), относительно траекторий движения игроков команды противника и игроков своей команды, относительно препятствий и границ площадки, поля или трассы. Также, система может быть использована для вычисления затрат энергии спортсмена и эффективности движений спортсмена во время выполнения упражнений.
Известны различные технические решения в рассматриваемой области и более широкой области локальных систем навигации.
Основой известных технических решений в области локальных систем навигации является применение методов определения местоположения подвижных объектов с использованием: приемников сигналов глобальных навигационных спутниковых систем (ГНСС), лидаров, инерциальных датчиков, оптических датчиков, магнитометрических датчиков, меток радиочастотной идентификации, их совместного использования, а также, ряда других технических решений.
Известны многочисленные технические решения, основанные на использовании приемников сигналов ГНСС, например, опубликованные в патентах US №6148262, US №6013007, US №5812049, US №5825327, RU №2399400 и др.
Известен также GPS-прибор для легкоатлетов и велосипедистов «Forerunner 50», выпускаемый компанией Garmin International Inc. (США), который может быть использован для регистрации скорости движения спортсмена и пройденного расстояния.
Также известна система для горнолыжника, содержащая GPS-прибор, который используется для записи траектории движения спортсмена и определения скорости его движения и расстояния, пройденного по трассе спуска (Adrian Wagli and Jan Skaloud Turning Point Trajectory Analysis for Skiers // Inside GNSS, spring 2007, volume 2, number 3).
Также известна система компании POLAR (Финляндия) для командных видов спорта «Polar team PRO», содержащая приемники GPS, которые используются для записи траектории движения игроков команд.
Всем упомянутым и другим системам, основанным на использовании приемников сигналов ГНСС, присущи следующие недостатки (Корнеев И.Л., Егоров В.В. Локальные системы навигации, дополняющие системы ГНСС // IX Международный Форум по спутниковой навигации, Москва, 22-24 апреля 2015 года): «плохой прием сигналов в лесистых и горных местностях, в условиях плотной высотной городской застройки, а также внутри зданий; характеристики точности, целостности и доступности ГНСС не в полной мере удовлетворяют требования некоторых групп потребителей; недостаточная помехоустойчивость - локальные помехи небольшой мощности... могут затруднить или сделать невозможным координатно-временные определения по сигналам ГНСС». Указанные недостатки ограничивают применение навигационных систем, основанных на использовании приемников сигналов ГНСС, для мониторинга местоположения и параметров движения спортсменов и спортивных снарядов.
Другие, упомянутые выше, технические решения также имеют недостатки, ограничивающие их применение для мониторинга местоположения и параметров движения спортсменов и спортивных снарядов. Это такие недостатки, как высокая стоимость оборудования и его обслуживания (лидары, некоторые виды инерциальных и оптических систем); пониженная надежность в условиях применения для спорта за счет наличия механических элементов (лидары, некоторые виды инерциальных и оптических систем); необходимость начальной калибровки (лидары, оптические и магнитометрические системы), исключающая оперативность развертывания системы на новом месте тренировок; необходимость периодической корректировки для устранения накопления погрешности (инерциальные системы), что требует дополнительного источника данных о местоположении и параметрах движения спортсменов и спортивных снарядов.
Широко известны также локальные системы навигации, построенные на основе обмена радиосигналами между радиоузлами с известными координатами и радиоузлами, местоположение которых необходимо определить. Такие системы, в основном, применяются для навигации транспортных средств (например, морских судов) и БПЛА (беспилотных летательных аппаратов). Примерами таких систем могут быть разностно-дальномерные системы PinPoint (2000 г. - Англия), CRS (2000 г. - США), UHRS(2014 г. - CLLIA). Для мониторинга местоположения и параметров движения спортсменов и спортивных снарядов существующие системы неприменимы, в том числе, из-за значительных габаритов и существенного веса абонентских устройств, что не позволяет устанавливать их на малогабаритных спортивных снарядах, или внутри последних, например, в шайбе для хоккея с шайбой, или в мяче для гольфа или тенниса.
Также, локальные системы навигации, построенные на основе обмена радиосигналами между радиоузлами, известны в области сотовой беспроводной радиосвязи и основаны на услуге LBS (location-based service). Для мониторинга местоположения и параметров движения спортсменов и спортивных снарядов такие системы неприменимы, так как тренировочная площадка или трасса могут находиться вне зоны действия сотовых сетей, а также из-за больших погрешностей определения местоположения. В некоторых случаях, эти погрешности достигают нескольких километров.
Наиболее близкое к заявляемой системе техническое решение описано в заявке US 20150378002 «Метод, устройство и программный продукт для улучшения характеристик систем позиционирования реального времени, использующих несколько технологий позиционирования», выбранной в качестве прототипа. В соответствии с прототипом система позиционирования, сконфигурированная таким образом, чтобы отслеживать движение участника внутри и снаружи наблюдаемой зоны, включает:
метку, ассоциированную с участником и передающую данные метки,
ассоциированный с участником сенсор, передающий данные сенсора,
множество приемников, принимающих данные метки и вычисляющих данные местоположения на основе данных метки,
приемный концентратор, предназначенный для получения данных местоположения и данных вычисления позиции сенсора, вычисленных на основании данных сенсора, и определения местоположение участника на основе данных местоположения, в случае если участник находится внутри наблюдаемой зоны, и определения позиции участника на основе данных вычисления позиции сенсора, в случае если участник находится за пределами наблюдаемой зоны.
Недостатком прототипа является отсутствие модулей синхронизации шкал времени в приемниках, принимающих данные метки, и в метках. Наличие синхронных шкал времени позволило бы увеличить количество одновременно обслуживаемых меток за счет сокращения трафика обмена радиосигналами и улучшить точность позиционирования меток за счет повышения количества измерений за тот же отрезок времени. Отсутствие синхронных шкал времени в приемниках и метках вынуждает систему определять местоположение и параметры движения каждого из спортсменов и спортивных снарядов раздельно, а не общими запросами, чтобы исключить коллизии. Это увеличивает трафик и, как следствие, уменьшает количество определений местоположений в единицу времени. Что, в свою очередь, увеличивает погрешность определения местоположения и параметров движения спортсменов и спортивных снарядов. В то же время, увеличение точности может исключить ложные показания о выходе спортивного снаряда за пределы тренировочной площадки или пересечении линии ворот ("гол"), что в спорте имеет чрезвычайную важность.
Другим недостатком прототипа является использование предположения о постоянстве и известном значении скорости распространения радиоволн, в частности, для условий распространения в воздушной среде и вблизи поверхности Земли. Известно, что скорость распространения радиоволн в тропосфере ниже скорости распространения радиоволн в вакууме. На величину этой скорости влияют такие факторы, как давление, температура, влажность, высота над уровнем Земли, тип подстилающей поверхности и другие. В худшем случае, когда действие всех воздействующих факторов складывается, ошибки могут доходить до десятых долей процента. В условиях мониторинга местоположения спортсменов, когда расстояния до самых дальних приемников на границах площадки могут достигать 100 метров и более (например, при игре в футбол, регби или хоккей с мячом), это неприемлемо. Как указано выше, даже ошибка в несколько сантиметров может привести к неверному выводу о выходе спортивного снаряда за пределы игровой площадки или о пересечении им линии ворот.
Еще одним недостатком прототипа является однозначная и неизменяемая функция (отсутствие многофункциональности) входящих в систему радиоузлов (метки и приемники). Это означает, что метки всегда функционально являются метками, ассоциированными с участниками и передающими данные метки, то есть, всегда являются устройствами, местоположение которых должно быть определено; а приемники всегда являются приемниками, принимающими данные метки и вычисляющими данные местоположения на основе данных метки, то есть, всегда являются устройствами, местоположение которых, в общем случае, известно. В связи с наличием указанного недостатка, система не имеет возможности быстрого развертывания и использования на неоткалиброванных заранее тренировочных площадках, а также дополнительной возможности использования в тех видах спорта, где требуется позиционирование участников в режиме "роя".
Недостатки прототипа решают заявляемая локальная система мониторинга местоположения и параметров движения спортсменов и спортивных снарядов.
Таким образом, техническими проблемами, существующими в настоящее время, являются проблемы, связанные с повышенной погрешностью определения местоположения и параметров движения спортсменов и спортивных снарядов (по причине ошибочности предположения о постоянстве и известном значении скорости распространения радиоволн, отсутствия модулей синхронизации шкал времени в радиоузлах) и отсутствие многофункциональности радиоузлов. Создание предлагаемого технического решения направлено на решение данных технических проблем, а, именно, на создание локальной системы мониторинга местоположения и параметров движения спортсменов и спортивных снарядов с улучшенными техническими характеристиками: повышенной точностью определения местоположения и параметров движения спортсменов и спортивных снарядов и с использованием многофункциональных радиоузлов.
Технический результат предлагаемого решения заключается в повышении точности определения местоположения и параметров движения спортсменов и спортивных снарядов, благодаря чему будут устранены недостатки известных систем.
Для достижения технического результата предлагаемая локальная система мониторинга местоположения и параметров движения спортсменов и спортивных снарядов, содержит:
- не менее одной радиометки, ассоциированной со спортсменом или спортивным снарядом и передающей данные радиометки,
- сенсоры, ассоциированные со спортсменом или спортивным снарядом,
- приемо-передатчики, установленные на границах наблюдаемой области, запрашивающие и принимающие данные радиометки,
- вычислительные средства, предназначенные для получения данных местоположения от приемо-передатчиков и определения, на основе данных местоположения, позиции спортсмена или спортивного снаряда.
При этом радиометки и приемо-передатчики выполнены с возможностью переключения между режимом передачи данных радиометки и режимом запроса и приема данных радиометки; содержат модуль синхронизации шкал времени. Вычислительные средства выполнены с возможностью определения скорости распространения радиоволн в заданные промежутки времени.
Дополнительными отличиями системы являются:
- использование в составе сенсоров устройств отслеживания движения, таких как трехосевые акселерометры, гироскопы, и магнетометры;
- использование идентификационной RFID метки, установленной на спортивной форме, личных вещах или теле спортсмена, и использование в составе радиометки считывателя идентификационной RFID метки;
- применение референсной метки, стационарно установленной на известном расстоянии между фазовыми центрами антенн референсной метки и одного из приемо-передатчиков системы;
- использование в составе приемо-передатчиков приемников сигналов глобальной навигационной спутниковой системы.
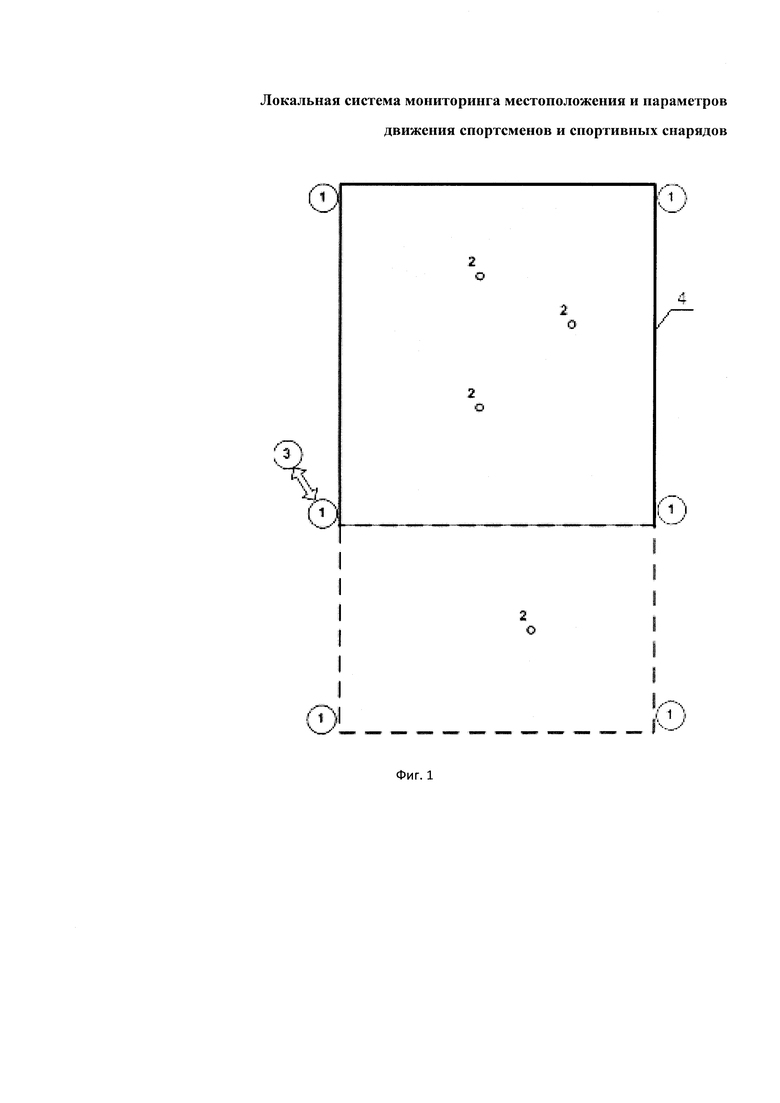
Сущность предлагаемого изобретения поясняется фиг. 1, на которой показан принцип установки приемо-передатчиков вокруг границ тренировочной площадки, увеличение площади охвата системой области проведения тренировки путем добавления дополнительных приемо-передатчиков, принцип установки референсной радиометки, где:
1 - приемо-передатчик
2 - радиометка
3 - референсная радиометка
4 - тренировочная площадка
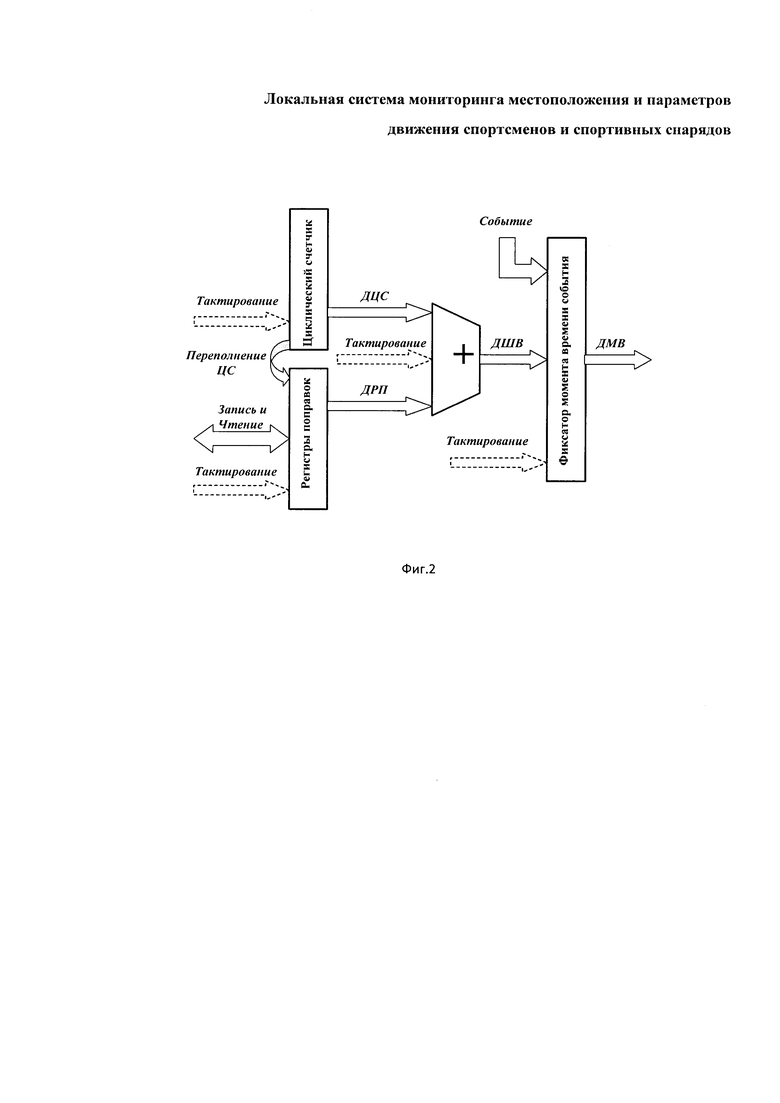
На фиг. 2 изображена упрощенная схема построения шкалы времени.
Локальная система мониторинга местоположения и параметров движения спортсменов и спортивных снарядов функционирует следующим образом.
Для быстрого развертывания системы на тренировочных площадках, которые заранее не были откалиброваны с точным определением местоположения точек, в которых должны устанавливаться приемо-передатчики 1, сначала приемо-передатчики 1 устанавливаются вокруг границ тренировочной площадки. Каждый из приемо-передатчиков 1, для определения его положения относительно других приемо-передатчиков, поочередно переключается в режим передачи данных радиометки. При переключении в режим передачи данных радиометки приемо-передатчик начинает генерировать и передавать данные, аналогичные данным радиометки. Данные радиометки включают информацию об уникальном идентификаторе радиометки, идентификаторе пакета данных, численное значение момента времени отправки пакета данных, выраженное в единицах шкалы времени приемопередатчика, переключившегося в режим передачи данных радиометки, и другие данные. Приемо-передатчики 1, не переключенные в режим передачи данных радиометки, принимают упомянутые данные и фиксируют по своей шкале времени моменты времени их приема. Каждый приемо-передатчик 1 передает принятые данные, данные о моментах времени их приема, данные о своем уникальном идентификаторе и другие данные в вычислительные средства, которые на основе переданных данных вычисляют местоположение фазового центра антенны приемо-передатчика 1, переключенного в режим передачи данных радиометки относительно фазовых центров антенн остальных приемо-передатчиков 1. После вычисления местоположения фазового центра антенны приемо-передатчика 1, переключенного в режим передачи данных радиометки, относительно фазовых центров антенн остальных приемопередатчиков 1, вычислительные средства передают приемо-передатчику 1, переключенному в режим передачи данных радиометки сигнал на возврат в режим запроса и приема данных радиометки. Таким образом, после поочередного переключения каждого приемо-передатчика 1 в режим передачи данных радиометки определяется форма и размеры новой тренировочной площадки 4 без необходимости предварительной калибровки.
Для определения в трех координатах местоположения фазовых центров антенн каждого из приемо-передатчиков 1 относительно фазовых центров антенн других приемо-передатчиков 1 количество устанавливаемых приемо-передатчиков 1 должно быть не менее четырех. Также, многофункциональность (наличие возможности переключения между режимом передачи данных радиометки и режимом запроса и приема данных радиометки) приемо-передатчиков позволяет оперативно увеличивать размер тренировочной площадки 4 путем добавления дополнительных приемо-передатчиков 1. Также, многофункциональность позволяет оперативно определять границы протяженных тренировочных трасс путем поэтапного добавления дополнительных приемо-передатчиков 1. Также, многофункциональность позволяет устанавливать приемо-передатчики 1 в заданные места на заданные расстояния от других приемо-передатчиков 1 не вручную, а при помощи технических средств: например, радиоуправляемых самодвижущихся тележек, квадрокоптеров или других управляемых средств доставки.
В частном случае, для быстрого развертывания системы на открытой местности с хорошим качеством приема сигналов ГНСС, приемо-передатчики 1 могут дополнительно содержать модули приемников сигналов ГНСС.
В средствах связи, объединяющих приемники и вычислительные средства в единое информационное пространство, используются беспроводные линии связи (например, Wi-Fi). В частном случае, в качестве линий связи могут использоваться кабельные линии связи, или, в другом частном случае - сочетание кабельных и беспроводных линий связи. Если применяются кабельные линии связи, то в процессе развертывания системы прокладываются и подключаются необходимые электрические и/или оптические кабели.
Также, в процессе развертывания системы, при необходимости, прокладываются и подключаются кабели электропитания. Приемо-передатчики 1 могут быть оборудованы автономными источниками питания. Если на время проведения тренировки достаточно емкости встроенных в приемо-передатчики 1 автономных источников электропитания, кабели электропитания могут не прокладываться.
Перед началом тренировки и/или соревнования на спортсменах закрепляются радиометки 2, которые в вычислительных средствах ассоциируются с конкретным спортсменом путем ввода соответствующей информации, сопоставляющей спортсмена и уникальный идентификатор радиометки 2. В частном случае, на спортивной форме, личных вещах или теле спортсмена может быть установлена метка радиочастотной идентификации (RFID метка), а радиометка 2 может содержать считыватель, предназначенный для считывания данных метки радиочастотной идентификации (RFID метки). В этом случае процесс ассоциирования спортсмена и уникального идентификатора радиометки 2 может быть автоматизирован.
Радиометки 2 могут быть установлены также на спортивных снарядах. В случае, когда спортивный снаряд имеет малые габариты или установка на него радиометки 2 мешает проведению тренировок или соревнований, радиометка 2 может быть установлена внутри спортивного снаряда. Это подразумевает необходимость изготовления специализированных спортивных снарядов со встроенной радиометкой 2, все нормируемые характеристики которых (например, вес, габариты и т.п.) соответствовали бы принятым в виде спорта стандартам. Зарядка аккумуляторов таких радиометок 2, установленных внутри спортивного снаряда, производится при помощи бесконтактных зарядных устройств.
Во время проведения тренировки или соревнования система работает в рабочем режиме. Приемо-передатчики 1 и радиометки 2 обмениваются радиосигналами в последовательности, заданной алгоритмом. При помощи средств, встроенных в приемо-передатчики 1 и радиометки 2, определяются промежутки времени между приемом и передачей радиосигналов, эти данные передаются в вычислительные средства, и вычислительные средства определяют расстояния между приемо-передатчиком 1 и радиометкой 2. Затем, по вычисленным значениям расстояний вычислительные средства определяют местоположение радиометки 2 внутри тренировочной площадки.
Для определения в трех координатах местоположения фазовых центров антенн каждой из радиометок 2 относительно фазовых центров антенн приемо-передатчиков 1 количество устанавливаемых приемо-передатчиков 1 должно быть не менее трех. Так как в заявляемой системе минимальное количество используемых приемо-передатчиков 1 равно четырем (для обеспечения быстрого развертывания системы на неоткалиброванных площадках), это позволяет одновременно проводить определение местоположения каждой из радиометок 2 четырежды и усреднять результаты.
Более подробно принцип функционирования системы в рабочем режиме изложен ниже.
Назначение таймслотов, порядок обмена сигналами в системе.
Для исключения наложения радиосигналов при их одновременной передаче различными объектами в системе назначается определенная последовательность обмена сигналами между радиометками 2 и приемо-передатчиками 1. Назначение последовательности обмена сигналами может производиться с помощью различных известных алгоритмов. Приведем один из вариантов назначения последовательности обмена.
Один из приемо-передатчиков 1 со своим уникальным идентификатором предварительно, перед началом тренировки, назначается при помощи вычислительных средств ведущим приемо-передатчиком. Это означает, что в процессе работы этот приемопередатчик будет начинать сеансы радиообмена с другими приемо-передатчиками 1 и радиометками 2, а также то, что его шкала времени будет считаться системной шкалой времени. По мере активизации приемо-передатчиков 1 после включения их питания, они извещают вычислительные средства об активизации, сообщают свой идентификатор, и ожидают команды вычислительных средств о назначении им роли в системе. Этот запрос с последующим ожиданием производится периодически, до тех пор, пока приемо-передатчик 1 не будет зарегистрирован в системе и ему не будет назначена роль, или ему будет отказано в регистрации. Одновременно с назначением роли (ведущий или ведомый, а также, который из ведомых в случае аварии примет на себя роль ведущего), ведомому приемо-передатчику 1 назначается таймслот. Каждый из таймслотов имеет длительность, обеспечивающую передачу максимально длинного для данной системы пакета информации, согласно применяемому протоколу, и дополнительный защитный интервал, для обеспечения свободных от наложений передачи и приема пакета, и для защиты от погрешностей шкалы времени, что актуально в начале работы, когда шкалы времени еще не синхронизированы.
Назначение таймслота для радиометки 2 производится следующим образом: при включении питания радиометки 2, она прослушивает эфир, определяет моменты пауз между сеансами обмена между другими радиометками 2 и приемо-передатчиками 1 и в эти моменты посылает запрос о регистрации в системе. Запрос содержит уникальный идентификатор радиометки 2. На основе последовательности, с которой регистрируются в системе радиометки 2, им назначаются различные таймслоты. Команду назначения таймслота, сопровождаемую уникальным идентификатором радиометки 2, выдают вычислительные средства. Радиометка 2 подтверждает получение команды занятием назначенного ей таймслота. После этого, вычислительные средства закрепляют назначенный таймслот за этой радиометкой 2 до окончания тренировки.
Радиообмен между приемо-передатчиками 1 и радиометками 2 производится сеансами. Передача радиосигнала ведущим приемо-передатчиком является сигналом для всех объектов системы о начале очередного сеанса обмена. Далее, в выделенные им таймслоты, отсчитываемые от начала сеанса обмена, передают свою информацию ведомые приемопередатчики. В процессе этого обмена, например, корректируются шкалы времени ведомых приемо-передатчиков. Далее, в выделенные им таймслоты, отсчитываемые от начала сеанса обмена, передают свою информацию радиометки. В одном из возможных вариантов, радиометки будут продолжать отсчитывать таймслоты и передавать информацию многократно.
Определение координат внутри наблюдаемой области
Известны, условно, две больших группы алгоритмов, с помощью которых может быть определено местоположение радиометки 2. Например, может использоваться одна из модификаций алгоритмов, основанных на определении задержки распространения радиосигнала (TOF, Time Of Flight), которая пропорциональна расстоянию между каждым из приемо-передатчиков 1 и радиометкой 2, или/и так называемой «круговой задержки» (RTT, Roundtrip Time), которая пропорциональна удвоенному расстоянию между каждым из приемопередатчиков 1 и радиометкой 2. Такие алгоритмы хорошо известны в области локальных систем радионавигации (Гоголев А., Екимов Д., Екимов К., Мощевикин А., Федоров А., Цыкунов И. Точность определения расстояний с помощью технологии nanoLoc // Беспроводные технологии, 2008, №3). При использовании этого метода, требуется большое количество передаваемых и принимаемых радиосигналов, используемых для определения местоположения каждой из меток 2, и с учетом высоких динамических характеристик меток 2, ограничивает количество одновременно отслеживаемых траекторий и параметров движения спортсменов и/или спортивных снарядов.
В то же время, так же хорошо известна вторая группа алгоритмов, в которых местоположение радиометки 2 может быть вычислено из результатов измерения малой разницы во времени (TDOA, Time Difference of Arrival) получения одного и того же радиосигнала от метки 2 разными приемо-передатчиками 1 (Gustafsson F., Gunnarsson F. Positioning Using Time-Difference of Arrival Measurements // ((Acoustics, Speech, and Signal Processing)), IEEE International Conference, Hong Kong, China, 2003). В этом случае, вычислительные средства определяют местоположение радиометки 2 путем решения систем нелинейных гиперболических уравнений. Также, требуется наличие синхронизированных шкал времени в приемо-передатчиках 1, для получения возможности измерения разницы во времени приема разными приемо-передатчиками 1 радиосигнала от радиометки 2, поскольку измерения производятся в разных местах, а должны быть привязаны к общей шкале времени.
Наличие модулей синхронизации шкал времени как в приемо-передатчиках 1, так и в метках 2 позволяет использовать в заявляемой системе сочетание алгоритмов, основанных на TOF/RTT и TDOA, когда можно отслеживать большое количество траекторий и параметров движения спортсменов и/или спортивных снарядов без необходимости решения систем нелинейных гиперболических уравнений.
Упрощенно, процесс синхронизации шкал времени и определения местоположения радиометок 2 в заявляемой системе происходит следующим образом. Для обеспечения синхронизации, один из приемо-передатчиков 1 назначается ведущим, и по его радиосигналам осуществляется синхронизация шкал времени остальных приемо-передатчиков 1 и всех радиометок 2. Получив радиосигналы от приемо-передатчиков 1, радиометка 2 начинает передавать группу ответных радиосигналов в отведенные для этой радиометки 2 интервалы времени (timeslots). Каждый радиосигнал содержит время отправки, а также ряд других данных, используемых для вычисления погрешностей шкал времени. Приемо-передатчики 1, принимая каждый из радиосигналов каждой из радиометок 2, фиксируют момент времени приема. Таким образом, в приемо-передатчике 1 имеется информация и о времени отправки радиосигнала, и о времени его приема, что позволяет проводить дальнейшие вычисления, аналогично алгоритмам, основанным на TOF/RTT.
В качестве одного из примеров реализации шкалы времени, на Фиг. 2 приведена упрощенная схема построения шкалы времени. Основными блоками простого варианта шкалы времени являются циклический счетчик, регистры поправок и сумматор. Все блоки шкалы времени работают в синхронном режиме (тактируются), чтобы избежать ошибок при автоматической или процессорной коррекции поправок, а также при суммировании данных циклического счетчика (ДЦС) и данных регистров поправок (ДРП).
Очевидно, что данные шкалы времени (ДШВ) будут изменяться скачками, в соответствии с периодом сигнала тактирования циклического счетчика.
Так же, скачками, будут изменяться и данные момента времени события (ДМВ), полученные фиксатором.
Модуль синхронизации шкал времени содержит, кроме аппаратных средств (шкала времени, схемы тактирования с генератором и др.), программные модули. Ниже будет приведен пример определения погрешности шкалы времени. Коррекция шкалы времени производится программно, например, с использованием интерфейса, который на Фиг. 2 имеет обозначение «Запись и Чтение».
В вычислительных средствах для вычисления расстояний от метки 2 до приемопередатчиков 1 по измеренным значениям задержек распространения радиосигнала TOF, используется информация о текущем значении скорости распространения радиоволн. Если расстояния между приемо-передатчиками 1 известны (площадка откалибрована), то скорость распространения радиоволн вычисляется из результатов измерения задержек распространения радиоволн между приемо-передатчиками 1 путем деления расстояния на задержку. В частном случае, если тренировка проводится на площадке, которая не была откалибрована, система дополнительно содержит референсную радиометку 3, стационарно устанавливаемую на известном (измеренном при помощи измерительных средств, или вычисляемом из известных данных) расстоянии между фазовыми центрами антенн референсной радиометки 3 и одного из приемо-передатчиков 1 системы. В другом частном случае, в качестве референсной радиометки 3 может использоваться один из приемо-передатчиков 1. В этом случае, этот приемо-передатчик устанавливается на известном (измеренном при помощи измерительных средств, или вычисляемом из известных данных) расстоянии между фазовыми центрами антенн этого приемо-передатчика 1 и одного из оставшихся приемо-передатчиков 1 системы.
Вычислительные средства имеют возможность определить из моментов времени приема и передачи радиосигналов радиомаяками и радиометками также и остальные данные, необходимые при работе системы, например, погрешности шкал времени для коррекции и синхронизации шкал времени. Так, например, возьмем первый приемо-передатчик 1 и второй приемо-передатчик 1, причем первый приемо-передатчик 1 является ведущим. Для второго приемо-передатчика 1 погрешность шкалы времени относительно шкалы времени первого приемо-передатчика 1 может быть вычислена по выражению:

где:
γi - погрешность шкалы времени приемо-передатчика 1 относительно шкалы времени ведущего первого приемо-передатчика 1;
τi-j - задержка распространения радиоволн между фазовым центром антенны передатчика первого приемо-передатчика 1 и фазовым центром антенны второго приемника приема-передатчика 1;
Mi-j - момент времени приема приемо-передатчиком j радиосигнала от приемопередатчика i, зафиксированный по шкале времени приемо-передатчика j;
Mi - момент времени передачи радиосигнала приемо-передатчиком i, зафиксированный по шкале времени приемо-передатчика i;
τПДi - значение задержки во внутренних электрических цепях передатчика и антенно-фидерном устройстве приемо-передатчика i, характеризующей через какой интервал времени после фиксации приемником момента передачи радиосигнала этот радиосигнал будет передан в эфир; является величиной известной, определенной в ходе заводской калибровки оборудования;
τПМi - значение задержки во внутренних электрических цепях приемника и антенно-фидерном устройстве приемо-передатчика i, характеризующей через какой интервал времени после приема сигнала из эфира момент времени приема будет зафиксирован приемопередатчиком i; является величиной известной, определенной в ходе заводской калибровки оборудования.
Техническая реализация вычисления текущего значения скорости распространения радиоволн основана на следующем.
Ведущий приемо-передатчик передает радиосигнал, фиксируя момент времени передачи. Остальные приемо-передатчики принимают этот радиосигнал, фиксируя момент времени приема. Затем каждый из ведомых приемо-передатчиков в отведенное ему время передает радиосигнал, содержащий как момент времени его передачи, так и момент времени приема радиосигнала от ведущего приемо-передатчика.
В случае, когда система развернута на откалиброванной площадке и расстояния между приемо-передатчиками известны, текущее значение скорости распространения радиоволн может быть вычислено, например, по данным от трех приемо-передатчиков из следующего выражения:

где:
с - текущее значение скорости распространения радиоволн;
Li-j - расстояние между фазовым центром антенны передатчика приемо-передатчика i и фазовым центром антенны приемника приемо-передатчика j;
Mi-j - момент времени приема приемо-передатчиком j радиосигнала от приемопередатчика i, зафиксированный по шкале времени приемо-передатчика j;
Ti - значение задержки между моментами передачи радиосигнала приемо-передатчиком i и приема этого же радиосигнала тем же приемо-передатчиком; является величиной известной, определенной в ходе заводской калибровки оборудования; если в конкретном варианте приемо-передатчика используется одна антенна как для приема, так и для передачи радиосигналов, эта величина соответствует задержке во внутренних электрических цепях и антенно-фидерном устройстве приемника, характеризующей через какой интервал времени после фиксации приемо-передатчиком момента передачи радиосигнала этот радиосигнал будет передан в эфир;
Mi - момент времени передачи радиосигнала приемо-передатчиком i, зафиксированный по шкале времени приемо-передатчика i.
Также, наличие в составе сенсора устройства отслеживания движения, совместно с многофункциональностью, обеспечивающей наличие возможности переключения между режимом передачи данных радиометки и режимом запроса и приема данных радиометки, обеспечивают возможность реализации функционирования системы в режиме роя. В этом случае, четыре метки переходят в режим запроса и приема данных радиометки (в роли приемо-передатчиков), один из которых выбирается в качестве ведущего. Они определяют свое взаимное расположение так же, как было описано выше, когда приемо-передатчики определяли размеры и форму тренировочной площадки при быстром развертывании системы. Для определения положения относительно сторон света используются магнетометры. Для определения расстояний, используется последнее из вычисленных системой значение скорости распространения радиоволн. В целом, режим работы системы напоминает режим работы с неподвижными приемо-передатчиками. Однако, одна из четырех меток, работающих в режиме запроса и приема данных радиометки, поочередно переводится в режим передачи данных радиометки для определения ее текущей позиции относительно остальных меток. Таким образом, определяется взаимное расположение в пространстве всех меток, включая те, которые выступают в роли приемо-передатчика. Если, в результате перемещения спортсменов, радиометки, выступающие в роли приемо-передатчиков заняли неудобную (например, скученную) позицию, производится выбор новой четверки меток для работы в роли приемопередатчиков.
Вычислительные средства (стационарный или переносной компьютер, например: ноутбук, планшетный компьютер, смартфон) содержат установленное программное обеспечение, выполняющее обработку и визуализацию принимаемых от приемо-передатчиков данных о местоположении приемо-передатчиков и радиометок и о параметрах движения радиометок. Вычислительные средства могут принимать данные не только от приемопередатчиков, но и от радиометок, при работе системы в режиме роя. В этом случае, радиометка, работающая в режиме запроса и приема данных радиометки и выступающая в роли ведущего приемо-передатчика, передает в вычислительные средства данные о местоположении радиометок, функционирующих в роли приемо-передатчиков, и радиометок и о параметрах движения радиометок, а установленное в вычислительные средства программное обеспечение выполняет обработку и визуализацию принимаемых данных.
Таким образом, предлагаемая локальная система мониторинга местоположения и параметров движения спортсменов и спортивных снарядов обладает улучшенными техническими характеристиками по сравнению с известными решениями.
Аппаратная реализация основных элементов системы
Приемо-передатчик содержит в своем составе микроконтроллеры, элементы автономного электропитания, модули беспроводной и/или кабельной передачи данных для связи с вычислительными средствами, приемо-передающее и антенно-фидерное устройство. Дополнительно, приемо-передатчики содержат модули синхронизации шкал времени. Функциональность приемо-передатчиков может быть обеспечена на существующей элементной базе. Основными компонентами являются, например, процессор STM32F401, производства STMicroelectronics, радиомодем SP1ML-868, производства STMicroelectronics, измеритель интервалов времени К1897АИ1Т, производства АО «ПКК Миландр», формирователь шкал времени с функциями запоминания, сдвига и коррекции К1897АП1Т, производства АО «ПКК Миландр». В то же время, большинство функциональных модулей приемо-передатчика могут быть также выполнены в составе программируемой логической интегральной схемы (ПЛИС). В качестве опорного генератора для формирователя шкал времени может использоваться, например, кварцевый ультра-миниатюрный прецизионный термостатированный генератор ГК199-ТС производства АО «Морион». Использование кварцевого генератора в качестве опорного для формирователя шкал времени оправдано, так как в рабочем режиме системы в радиоузлах функционируют модули синхронизации шкал времени. Характеристики стабильности генератора ГК199-ТС позволяют проводить коррекцию шкал времени не чаще 1 раза за 10 секунд.
Радиометка имеет близкий функциональный состав с приемо-передатчиком, разница заключается в алгоритме работы. Радиометка содержит в своем составе микроконтроллеры, элементы автономного электропитания, приемо-передающее и антенно-фидерное устройство. Дополнительно, радиометки содержат модули синхронизации шкал времени. Функциональность меток может быть обеспечена на существующей элементной базе. Основными компонентами являются, например, процессор STM32F401, производства STMicroelectronics, радиомодем SP1ML-868, производства STMicroelectronics, измеритель интервалов времени К1897АИ1Т, производства АО «ПКК Миландр», формирователь шкал времени с функциями запоминания, сдвига и коррекции К1897АП1Т, производства АО «ПКК Миландр». В то же время, большинство функциональных модулей метки могут быть также выполнены в составе программируемой логической интегральной схемы (ПЛИС). В качестве опорного генератора для формирователя шкал времени может использоваться, например, кварцевый ультра-миниатюрный прецизионный термостатированный генератор ГК199-ТС производства АО «Морион».
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МОНИТОРИНГА ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ СПОРТСМЕНОВ | 2017 |
|
RU2677061C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ПАССАЖИРСКОГО ДРОНА В ГОРНОЙ МЕСТНОСТИ | 2018 |
|
RU2681278C1 |
| Установка для тренировок в различных видах спорта с мячом | 2017 |
|
RU2675922C1 |
| Способ тренировки технических приемов и двигательных действий | 2015 |
|
RU2606861C1 |
| Система определения местоположения объекта | 2018 |
|
RU2698409C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАДИОМЕТОК В КОНТРОЛИРУЕМОМ ПОМЕЩЕНИИ | 2023 |
|
RU2813090C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ДОРОЖНЫХ ЗНАКОВ | 2021 |
|
RU2760038C1 |
| КОМПЛЕКС ИЗМЕРИТЕЛЬНЫЙ РАДИОТЕХНИЧЕСКИЙ ДЛЯ ЦИФРОВОЙ РЕГИСТРАЦИИ ПАРАМЕТРОВ ПЕРЕМЕЩЕНИЯ СПОРТСМЕНОВ | 2010 |
|
RU2472173C2 |
| ЗАЩИТНАЯ СИСТЕМА СПОРТСМЕНА | 2012 |
|
RU2486851C1 |
| ИНТЕРАКТИВНЫЙ СПОСОБ ТЕХНИКО-ТАКТИЧЕСКОЙ ПОДГОТОВКИ В ИГРОВЫХ ВИДАХ СПОРТА | 2016 |
|
RU2611324C1 |
Изобретение относится к системам мониторинга местоположения. Техническим результатом является повышение точности определения местоположения и параметров движения спортсменов и спортивных снарядов. Упомянутый технический результат достигается тем, что в предлагаемой системе радиометки выполнены с возможностью переключения из режима передачи данных радиометки в режим запроса и приема данных радиометки и содержат модуль синхронизации шкал времени, приемо-передатчики выполнены с возможностью переключения из режима передачи данных радиометки в режим запроса и приема данных радиометки и содержат модуль синхронизации шкал времени, вычислительные средства выполнены с возможностью определения скорости распространения радиоволн в заданные промежутки времени. 6 з.п. ф-лы, 2 ил.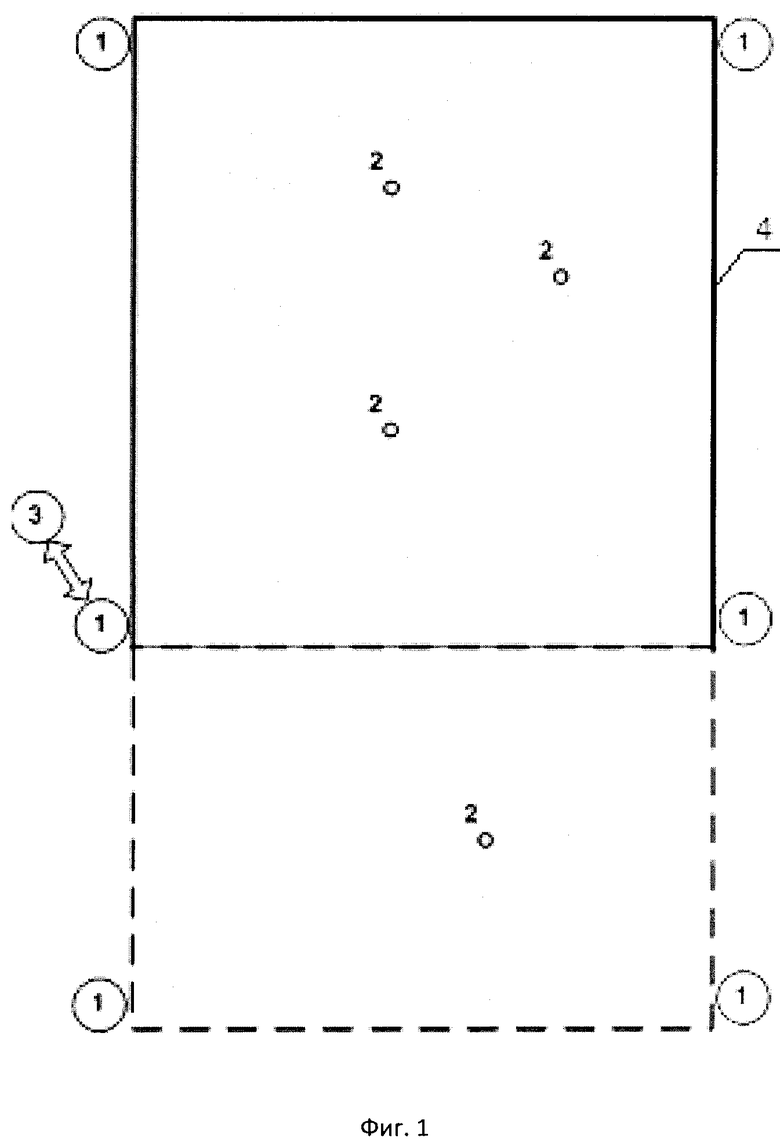
1. Локальная система мониторинга местоположения и параметров движения спортсменов и спортивных снарядов, содержащая:
- не менее одной радиометки, ассоциированной со спортсменом или спортивным снарядом и передающей данные радиометки,
- сенсоры, ассоциированные со спортсменом или спортивным снарядом,
- приемо-передатчики, установленные на границах наблюдаемой области, запрашивающие и принимающие данные радиометки,
- вычислительные средства, предназначенные для получения данных местоположения от приемо-передатчиков и определения, на основе данных местоположения, позиции спортсмена или спортивного снаряда,
отличающаяся тем, что радиометки выполнены с возможностью переключения из режима передачи данных радиометки в режим запроса и приема данных радиометки и содержат модуль синхронизации шкал времени, приемо-передатчики выполнены с возможностью переключения из режима передачи данных радиометки в режим запроса и приема данных радиометки и содержат модуль синхронизации шкал времени, при этом вычислительные средства выполнены с возможностью определения скорости распространения радиоволн в заданные промежутки времени.
2. Система по п. 1, отличающаяся тем, что в составе сенсора содержится инерциальное устройство отслеживания движения.
3. Система по п. 2, отличающаяся тем, что в качестве инерциального устройства отслеживания движения используется устройство, содержащее трехосевые акселерометр, гироскоп и магнетометр.
4. Система по п. 1, отличающаяся тем, что дополнительно содержит средства идентификации спортсмена, выполняющие привязку радиометки к идентификационным параметрам спортсмена.
5. Система по п. 4, отличающаяся тем, что средства идентификации спортсмена состоят из метки радиочастотной идентификации, установленной на спортивной форме, личных вещах или теле спортсмена, и считывателя, дополнительно включенного в состав радиометки.
6. Система по п. 1, отличающаяся тем, что содержит референсную метку, которая стационарно установлена на известном расстоянии между фазовыми центрами антенн референсной метки и одного из приемо-передатчиков системы.
7. Система по п. 1, отличающаяся тем, что в составе приемо-передатчиков содержатся приемники сигналов глобальной навигационной спутниковой системы.
| US 7671802 B2, 02.03.2010 | |||
| US 2018063811 А1, 01.03.2018 | |||
| US 2016050519 A1, 18.02.2016 | |||
| US 2015375041 A1, 31.12.2015 | |||
| US 2016361595 A1, 15.12.2016 | |||
| ВЫСОКОТОЧНАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2657185C1 |

