Предлагаемое изобретение относится к техническим средствам обучения и может быть применено в тренажерах для подготовки операторов комплексов управляемого вооружения с целью приобретения, поддержания и совершенствования соответствующих навыков «боевой» работы.
Под комплексом управляемого вооружения подразумевается всепогодный противотанковый ракетный комплекс (ПТРК) «Хризантема-С» с модернизированной боевой машиной (БМ) 9П157.
ПТРК «Хризантема-С» с модернизированной БМ 9П157 имеет два канала наведения ракеты на цель и стрельба из него возможна в трех режимах: автоматическом, полуавтоматическом и комбинированном.
Стрельба в автоматическом режиме осуществляется с помощью радиолокационной системы обнаружения и сопровождения целей с одновременным управлением ракетой. Радиолокационный канал позволяет наводить ракету на цель ночью, в тумане, при дожде и снеге, а также при искусственном или естественном задымлении. Указанный канал позволяет наводить ракету на радиолокационно различимые объекты - танки, БМП, другие бронированные цели, низколетящие вертолеты и т.п., но не дает возможности наведения на скрытые в складках местности инженерные сооружения (ДОТы, ДЗОТы и др.), живую силу в укрытии и т.п. По этим целям ПТРК работает в полуавтоматическом режиме, в котором ракета наводится по лучу лазера.
При работе в комбинированном режиме пуск двух ракет производится последовательно: первая ракета наводится в радиолокационном канале управления, вторая - в полуавтоматическом.
Современные сложные и дорогостоящие комплексы вооружения, в том числе ПТРК, не могут эффективно функционировать без хорошо обученного персонала. При подготовке специалистов для работы на таких комплексах возникает ряд проблем. Во-первых, непосредственное обучение на реальной боевой технике и в условиях, приближенным к боевым, невозможно вследствие экономических причин. Во-вторых, некоторые фрагменты боевой работы расчетов (операторов) для множества возможных ситуаций трудно воспроизводимы. При этом, чем более совершенным оказывается вооружение, тем труднее его использовать в учебных целях.
Для решения указанных проблем широко используются специализированные тренажеры, которые в современных условиях постепенно переходят из категории вспомогательного, обеспечивающего оборудования, в одну из категорий, определяющих боеспособность современной армии и становится инструментом подготовки войск.
Мировой опыт создания учебно-тренировочных средств (УТС) показывает, что в условиях все возрастающей сложности современного вооружения, добиться развития и совершенствования учебной материально-технической базы можно только через внедрение высокопроизводительных компьютерных систем с разработкой специализированного программного обеспечения, что позволяет создать требуемую обстановку, значительно повысить динамичность занятий, осуществлять действенный контроль над выполнением поставленных задач и, тем самым, добиться максимальной эффективности обучения.
Известен тренажер, предназначенный для обучения операторов БМ 9П157 ПТРК «Хризантема-С» с оптико-лазерной (ОЛ) и радиолокационной (РЛ) системами управления навыкам обнаружения, сопровождения, захвата имитируемых целей, производства электронных пусков (Патент РФ на полезную модель №89218, МПК F41G 3/26, 2009 г.).
Тренажер содержит первую персональную электронно-вычислительную машину (ПЭВМ) - специализированный вычислитель для управления режимами работы тренажера с рабочего места инструктора (РМИ), вторую ПЭВМ - специализированный вычислитель для имитации визуальной обстановки (ВО) канала оптико-лучевой системы управления (ОЛСУ), третью ПЭВМ - специализированный вычислитель для имитации ВО канала радиолокационной системы управления (РЛСУ), имитаторы пульта оператора (ПО) БМ 9П157, блока управления канала РЛСУ, пульта управления маркером РЛСУ, пульта управления комбинированным оптическим прибором управления (КОПУ) и многофункционального индикатора (МФИ) с узлом связи на основе микро-ЭВМ и преобразователем интерфейсов в составе, телефоны головные оператора, а также установленные в шкафу приборном вместе с блоками системными (БС) первой-третьей ПЭВМ блок розеток, нагнетательный вентилятор, источник бесперебойного питания (ИБП), вторичный источник питания (ВИП), коммутатор локальной вычислительной сети (ЛВС). При этом в состав первой и второй ПЭВМ входят видеомониторы (ВМ), а в состав первой ПЭВМ, установленной на РМИ, еще и клавиатура, манипулятор «мышь».
Аппаратура тренажера компоновалась на двух столах из состава учебного класса, при этом за первым столом размещается рабочее место обучаемого (РМО), а за вторым - рабочее место инструктора.
В состав РМО входят имитаторы ВО каналов ОЛСУ и РЛСУ на базе второй и третьей ПЭВМ соответственно, а также имитаторы пульта оператора БМ 9П157, КОПУ, пульта управления КОПУ, блока управления маркером РЛСУ, МФИ с узлом связи на основе микро-ЭВМ и преобразователем интерфейсов в составе, головные телефоны оператора.
Учебно-информационная модель (УИМ) канала РЛСУ рабочего места оператора известного тренажера построена на основе БС третьей ПЭВМ и имитаторов ПО БМ 9П157, блока управления маркером РЛСУ, МФИ.
УИМ канала ОЛСУ рабочего места оператора построена на основе БС и ВМ второй ПЭВМ и имитаторов КОПУ (налобник с визирным каналом и окуляром, в поле зрения которого вписывался вертикальный размер растра ВМ, отстоящего от объектива визира на расстояние около 1 м, кнопка «Пуск» на специальной рукоятке), пульта управления КОПУ, ПО БМ 9П157.
Головные телефоны необходимы для прослушивания звука схода ПТУР при электронных пусках и звуков «боя».
Имитатор ПО БМ 9П157 обеспечивал при помощи элементов управления (тумблеры, кнопки, переключатель) и встроенного видеомонитора отработку алгоритмов включения питания БМ, выбора режимов управления ПТУР, управления имитируемыми исполнительными механизмами БМ, контроль их положения.
До 2014 г. в состав БМ 9П157 ПТРК «Хризантема-С» входил КОПУ 1К118 (изготовитель ГП НПК «Фотоприбор», г. Черкассы, Украина). После разрыва связей с Украиной была проведена модернизация БМ 9П157. Целью модернизации являлось повышение ТТХ боевой машины 9П157 (обеспечение круглосуточного обнаружения и распознавания нерадиоконтрастных целей), обеспечение работы БМ 9П157 в контуре автоматизированного управления противотанковыми формированиями, оснащенными средствами управления из состава унифицированного комплекса программно-технических средств управления (УКПТСУ) - индекс 83т289-1.6.
В процессе выполнения модернизации были проведены работы по замене КОПУ 1К118 на основе оптического прицела на КОПУ 1К118П другого изготовителя с теплотелевизионной системой в составе, изменению пульта оператора БМ, который стал состоять из собственно пульта оператора с органами управления режимами работы и панели индикации, внедрению средств управления из состава комплекса 83т289-1.6.
Учебно-информационная модель тренажера по патенту №89218 от 17.07.2009 г. перестала соответствовать облику модернизированной БМ.
Кроме того, недостатком известного тренажера можно считать также тот факт, что рабочее место оператора, в том числе и в части компоновки аппаратуры, выполнено без учета ограниченного и замкнутого объема рубки (правый борт) штатной БМ.
Перед авторами стояла задача создания УИМ тренажера, соответствующей информационной модели рабочего места оператора-наводчика модернизированной БМ 9П157 (правый борт) в части объема основной аппаратуры, ее функциональных возможностей и расположения с учетом ограниченного и замкнутого объема рубки БМ.
Поставленная задача решена за счет введения в известный тренажер дополнительных блоков, их связей между собой и известными устройствами, выполнению рабочего места оператора в виде кабины каркасного типа, имитирующей правый борт модернизированной БМ ПТРК «Хризантема-С» с аналогичной компоновкой соответствующей имитационной аппаратуры.
Конкретно задача решена за счет того, что в тренажер для подготовки операторов ПТРК с комбинированной системой наведения, содержащий РМИ на основе стола рабочего на металлическом каркасе с кабель-каналами, первой ПЭВМ с ВМ в составе, а также с подключенными к нему клавиатурой и манипулятором «Мышь», РМО с имитаторами ВО оптико-лучевого и радиолокационного каналов наведения ракеты на основе второй и третьей ПЭВМ соответственно, имитаторами ПО боевой машины, МФИ, блока управления маркером радиолокационного канала наведения, пульта управления КОПУ, КОПУ, узлом связи из состава имитатора МФИ на основе последовательно соединенных микро-ЭВМ и преобразователя интерфейсов, и подключенными к звуковому выходу БС третьей ПЭВМ головными телефонами оператора, установленные в шкафу приборном вместе с БС первой-третьей ПЭВМ блок розеток, нагнетательный вентилятор, ИБП, подключенный к первому выходу блока розеток, ВИП, первый-третий выходы которого соединены с входами питания имитаторов МФИ, КОПУ и ПО боевой машины соответственно, коммутатор ЛВС, подключенный к первому стабилизирующему выходу ИБП, при этом вход блока розеток является входом поступления напряжения питания шкафа приборного и всего тренажера в целом, второй выход блока розеток соединены с входом нагнетательного вентилятора, порты первый, второй и третий коммутатора ЛВС подключены к сетевым выходам (LAN) БС первой, второй и третьей ПЭВМ соответственно, второй-шестой стабилизирующие выходы ИБП подключены к входам питания БС первой-третьей ПЭВМ, ВМ первой ПЭВМ и ВИП соответственно, выход преобразователя интерфейсов, являющийся выходом имитатора МФИ, подключен к первому входу интерфейса RS-485 БС третьей ПЭВМ, а вход микро-ЭВМ, являющийся одновременно входом имитатора МФИ, соединен с выходом имитатора блока управления маркером радиолокационного канала наведения, видеовход имитатора МФИ подключен к выходу интерфейса DVI БС третьей ПЭВМ, дополнительно введены имитаторы пульта управления должностного лица (ПУДЛ), радиостанции и панели многофункциональной (ПМФ) из состава аппаратуры УКПТСУ противотанковыми формированиями, в состав РМИ дополнительно введен второй ВМ, подключенный ко второму выходу интерфейса DVI БС первой ПЭВМ и запитанный от седьмого стабилизирующего выхода ИБП, РМО выполнено в виде кабины каркасного типа, имитирующей правый борт модернизированной боевой машины ПТРК «Хризантема-С», при этом первый и второй выходы интерфейса DVI БС второй ПЭВМ подключены к видеовходам имитаторов КОПУ и ПМФ соответственно, выход имитатора радиостанции и первый выход имитатора ПО подключены к первому и второму информационным входам имитатора ПМФ соответственно, вход управления сенсорным экраном имитатора ПМФ соединен с выходом интерфейса USB БС второй ПЭВМ, вход питания и информационный выход имитатора пульта управления КОПУ подключены к цепи питания и информационному входу имитатора КОПУ соответственно, параллельно соединенные второй выход имитатора ПО и выходы имитаторов КОПУ и ПМФ подключены к входу интерфейса RS-485 БС второй ПЭВМ, выход имитатора ПУДЛ подключен ко второму входу интерфейса RS-485 БС третьей ПЭВМ, входы питания имитаторов ПУДЛ и ПМФ подключены к четвертому и пятому выходам ВИП.
Имитатор КОПУ выполнен в виде имитаторов индикатора телевизионного (ИТВ) боевой машины на основе ВМ жидкокристаллического (ЖК) типа с кнопками регулировки параметров изображения, панели управления КОПУ с элементами управления и индикации, последовательно соединенных узла микро-ЭВМ и преобразователя интерфейсов, при этом вход имитатора ИТВ, являющийся соответствующим входом ВМ, является видеовходом имитатора КОПУ, выход преобразователя интерфейсов является соответствующим выходом имитатора КОПУ, информационный вход имитатора КОПУ является первым информационным входом узла микро-ЭВМ, вторым и третьим информационными входами которого являются соответственно выходы имитаторов ИТВ и панели управления с элементами управления и индикации, вход питания имитатора КОПУ, подключенный ко второму выходу ВИП, объединен с входами питания узла микро-ЭВМ, преобразователя интерфейсов, имитаторов ИТВ и панели управления, и является одновременно цепью питания имитатора пульта управления КОПУ.
Имитатор пульта оператора боевой машины выполнен в виде имитаторов собственно пульта оператора с органами управления режимами работы и панели индикации с единичными и цифровыми светодиодными индикаторами, а также узла микро-ЭВМ и преобразователя интерфейсов, при этом выход имитатора собственно ПО является первым выходом имитатора ПО боевой машины, выход преобразователя интерфейсов является вторым выходом имитатора ПО, первый и второй информационные выходы узла микро-ЭВМ подключены к преобразователю интерфейсов и имитатору панели индикации соответственно, вход питания имитатора ПО подключен к третьему выходу ВИП и объединен с входами питания узла микро-ЭВМ, преобразователя интерфейсов и имитатора панели индикации.
В имитаторе пульта управления КОПУ введены тумблер включения режима «ПЫЛЬ» боевой машины 9П157 и кнопка измерения дальности цели лазерным дальномером, электрические цепи которых подключены к информационному входу имитатора КОПУ.
Имитатор ПУДЛ выполнен в виде дисплейного модуля (ДМ) газоразрядного типа, пленочной клавиатуры, узла микро-ЭВМ и преобразователя интерфейсов, выход которого является выходом имитатора ПУДЛ, при этом пленочная клавиатура подключена к входу узла микро-ЭВМ, первый и второй выходы которого соединены с входами ДМ и преобразователя интерфейсов соответственно, вход питания имитатора ПУДЛ объединен с входами питания узла микро-ЭВМ, преобразователя интерфейсов, ДМ и пленочной клавиатуры.
Имитатор ПМФ выполнен в виде ВМ ЖК типа с сенсорным управлением экрана, кнопочных переключателей управления работой панели, узла микро-ЭВМ и преобразователя интерфейсов, выход которого является выходом имитатора ПМФ, при этом вход преобразователя интерфейсов соединен с выходом узла микро-ЭВМ, первый и второй входы которого являются соответственно первым и вторым информационными входами имитатора ПМФ, третий вход узла микро-ЭВМ соединен с кнопочными переключателями управления работой ПМФ, видеовход и вход управления сенсорным экраном ВМ являются соответствующими видеовходом и входом управления сенсорным экраном имитатора ПМФ, вход питания имитатора ПМФ объединен с входами питания узла микро-ЭВМ, преобразователя интерфейсов и ВМ.
Заявленный тренажер для подготовки операторов ПТРК с комбинированной системой наведения обладает совокупностью существенных признаков, не известных из уровня техники для устройств подобного назначения, что позволяет сделать вывод о соответствии критерию «новизны» для предполагаемого изобретения.
Сущность предлагаемого тренажера поясняется с помощью чертежей и рисунков, где:
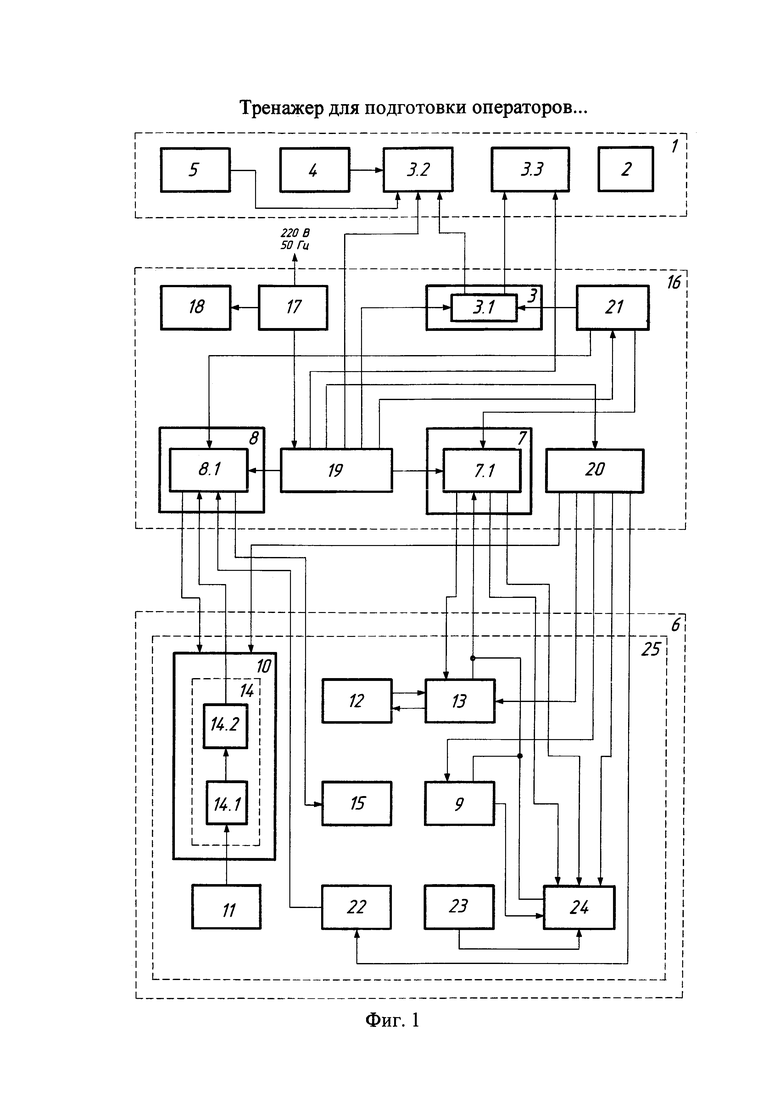
- на фиг. 1 представлена блок-схема тренажера;
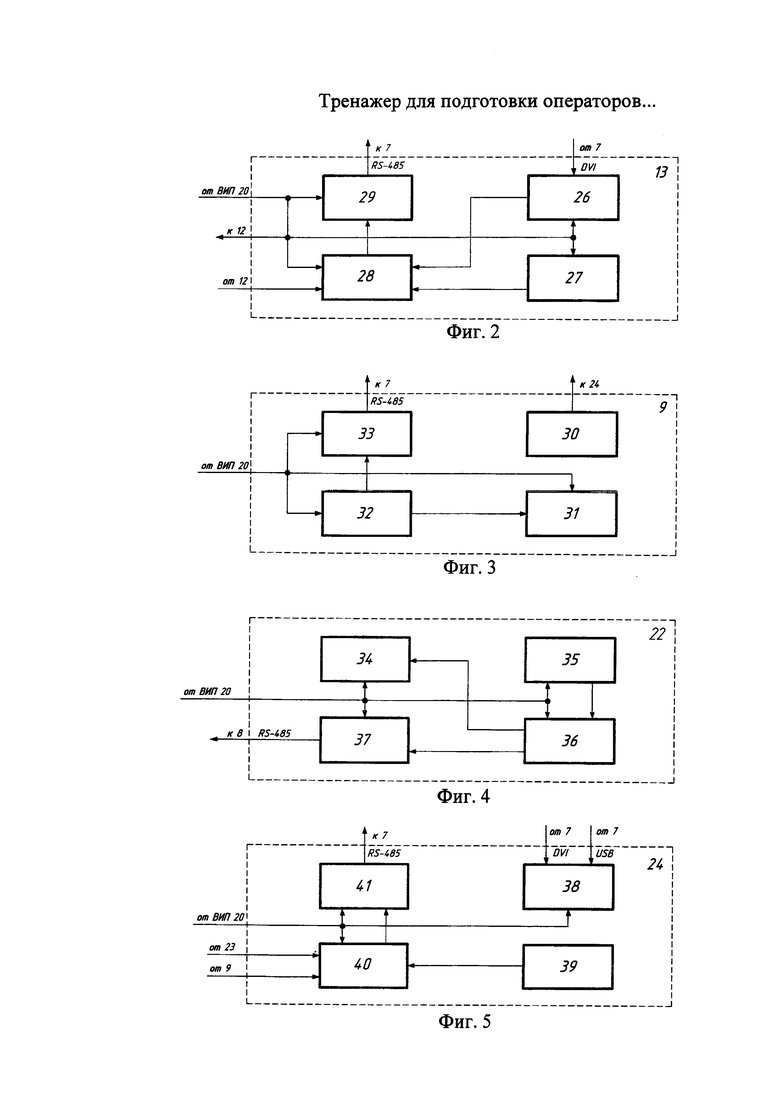
- на фиг. 2 - блок-схема имитатора КОПУ;
- на фиг. 3 - блок-схема имитатора ПО;
- на фиг. 4 - блок-схема имитатора ПУДЛ;
- на фиг. 5 - блок-схема имитатора ПМФ;
Тренажер для подготовки операторов ПТРК с комбинированной системой наведения содержит РМИ 1 на основе стола 2 рабочего на металлическом каркасе с кабель-каналами, первой ПЭВМ 3 с ВМ 3.2 в составе, с подключенными к нему клавиатурой 4 и манипулятором 5 «Мышь», РМО 6 с имитаторами ВО оптико-лучевого и радиолокационного каналов наведения ракеты на основе второй ПЭВМ 7 и третьей ПЭВМ 8 соответственно, имитаторами ПО 9 БМ, МФИ 10, блока 11 управления маркером радиолокационного канала наведения, пульта 12 управления КОПУ, КОПУ 13, узлом 14 связи из состава имитатора МФИ 10 на основе последовательно соединенных микро-ЭВМ 14.1 и преобразователя 14.2 интерфейсов и подключенными к звуковому выходу БС 8.1 третьей ПЭВМ 8 головными телефонами 15 оператора, установленные в шкафу 16 приборном вместе с БС 3.1, 7.1, 8.1 первой-третьей ПЭВМ, блок 17 розеток, нагнетательный вентилятор 18, ИБП 19, подключенный к первому выходу блока 17 розеток, ВИП 20, первый-третий выходы которого соединены с входами питания имитаторов МФИ 10, КОПУ 13 и ПО 9 боевой машины соответственно, при этом вход блока 17 розеток является входом поступления напряжения питания шкафа 16 приборного и всего тренажера в целом, второй выход блока 17 розеток соединен с входом нагнетательного вентилятора 18, порты первый, второй и третий коммутатора 21 ЛВС подключены к сетевым выходам LAN блоков 3.1, 7.1, 8.1 системных первой 3, второй 7 и третьей ПЭВМ 8 соответственно, второй-шестой стабилизирующие выходы ИБП 19 подключены к входам питания БС 3.1, 7.1, 8.1 первой-третьей ПЭВМ, видеомонитора 3.2 первой ПЭВМ 3 и ВИП 20 соответственно, выход преобразователя 14.2 интерфейсов, являющийся выходом имитатора МФИ 10, подключен к первому входу интерфейса RS-485 БС 8.1 третьей ПЭВМ 8, а вход микро-ЭВМ 14.1, являющийся одновременно входом имитатора МФИ 10, соединен с выходом имитатора блока 11 управления маркером радиолокационного канала наведения, видеовход имитатора МФИ 10 подключен к выходу интерфейса DVI БС 8.1 третьей ПЭВМ 8, а также имитаторы ПУДЛ 22, радиостанции 23 и ПМФ 24 из состава аппаратуры УКПТСУ противотанковыми формированиями. РМИ 1 дополнительно содержит второй ВМ 3.3, подключенный ко второму выходу интерфейса DVI БС 3.1 первой ПЭВМ 3 и запитанный от седьмого стабилизирующего выхода ИБП 19. РМО 6 выполнено в виде кабины 25 каркасного типа, имитирующей правый борт модернизированной БМ ПТРК «Хризантема-С». При этом первый и второй выходы интерфейса DVI БС 7.1 второй ПЭВМ 7 подключены к видеовходам имитаторов КОПУ 13 и ПМФ 24 соответственно, выход имитатора радиостанции 23 и первый выход имитатора ПО 9 подключены к первому и второму информационным входам имитатора ПМФ 24 соответственно, вход управления сенсорным экраном имитатора ПМФ 24 соединен с выходом интерфейса USB БС 7.1 второй ПЭВМ 7, вход питания и информационный выход имитатора пульта 12 управления КОПУ подключены к цепи питания и информационному входу имитатора КОПУ 13 соответственно, параллельно соединенные второй выход имитатора ПО 9 и выходы имитаторов КОПУ 13 и ПМФ 24 подключены к входу интерфейса RS-485 БС 7.1 второй ПЭВМ 7, выход имитатора ПУДЛ 22 подключен ко второму входу интерфейса RS-485 БС 8.1 третьей ПЭВМ 8.
Имитатор КОПУ 13 содержит имитаторы ИТВ 26 боевой машины на основе видеомонитора ЖК типа с кнопками регулировки параметров изображения, панели 27 управления КОПУ 13 с элементами управления и индикации, последовательно соединенные узел 28 микро-ЭВМ и преобразователь 29 интерфейсов. При этом вход имитатора ИТВ 26, являющийся соответствующим входом ВМ, является видеовходом имитатора КОПУ 13, выход преобразователя 29 интерфейсов является соответствующим выходом имитатора КОПУ 13, информационный вход имитатора КОПУ 13 является первым информационным входом узла 28 микро-ЭВМ, вторым и третьим информационными входами которого являются соответственно выходы имитаторов ИТВ 26 и панели 27 управления с элементами управления и индикации, вход питания имитатора КОПУ 13, подключенный ко второму выходу ВИП 20, объединен с входами питания узла 28 микро-ЭВМ, преобразователя 29 интерфейсов, имитаторов ИТВ 26 и панели 27 управления, и является одновременно цепью питания имитатора пульта 12 управления КОПУ.
Имитатор ПО 9 боевой машины содержит имитаторы собственно пульта 30 оператора с органами управления режимами работы и панели 31 индикации с единичными и цифровыми светодиодными индикаторами, а также узел 32 микро-ЭВМ и преобразователь 33 интерфейсов. При этом выход имитатора собственно пульта 30 оператора является первым выходом имитатора ПО 9 боевой машины, выход преобразователя 33 интерфейсов является вторым выходом имитатора ПО 9, первый и второй информационные выходы узла 32 микро-ЭВМ подключены к преобразователю 33 интерфейсов и имитатору панели 31 индикации соответственно, вход питания имитатора ПО 9 подключен к третьему выходу ВИП 20 и объединен с входами питания узла 32 микро-ЭВМ, преобразователя 33 интерфейсов и имитатора панели 31 индикации.
Имитатор пульта 12 управления КОПУ 13 дополнительно содержит тумблер включения режима «ПЫЛЬ» БМ 9П157 и кнопку измерения дальности цели лазерным дальномером, электрические цепи которых подключены к первому информационному входу имитатора КОПУ 13.
Имитатор ПУДЛ 22 содержит ДМ 34 газоразрядного типа, пленочную клавиатуру 35, узел 36 микро-ЭВМ и преобразователь 37 интерфейсов, выход которого является выходом имитатора ПУДЛ 22. При этом пленочная клавиатура 35 подключена к входу узла 36 микро-ЭВМ, первый и второй выходы которого соединены с входами ДМ 34 и преобразователя 37 интерфейсов соответственно, вход питания имитатора ПУДЛ 22 объединен с входами питания узла 36 микро-ЭВМ, преобразователя 37 интерфейсов, ДМ 34 и пленочной клавиатуры 35.
Имитатор ПМФ 24 содержит видеомонитор 38 ЖК типа с сенсорным управлением экрана, кнопочные переключатели 39 управления работой ПМФ, узел 40 микро-ЭВМ и преобразователь 41 интерфейсов, выход которого является выходом имитатора ПМФ 24. При этом вход преобразователя 41 интерфейсов соединен с выходом узла 40 микро-ЭВМ, первый и второй входы которого являются соответственно первым и вторым информационными входами имитатора ПМФ 24, третий вход узла 40 микро-ЭВМ соединен с кнопочными переключателями 39 управления работой ПМФ, видеовход и вход управления сенсорным экраном ВМ 38 являются соответствующими видеовходом и входом управления сенсорным экраном имитатора ПМФ 24, вход питания имитатора ПМФ 24 объединен с входами питания узла 40 микро-ЭВМ, преобразователя 41 интерфейсов и ВМ 38.
В учебном классе аппаратура тренажера размещается на столе 2 инструктора, в шкафу 16 приборном и в имитаторе кабины 25 модернизированной БМ 9П157.
На столе 2 размещены два видеомонитора 3.2 и 3.3, клавиатура 4 и манипулятор 5 «Мышь». На РМИ 1 первый ВМ 3.2 выполняет функции ВМ управления, второй ВМ 3.3 - функции контрольного ВМ. ВМ управления обеспечивает отображение служебной информации, необходимой инструктору для управления работой тренажера.
В том же шкафу 16 размещаются:
- ИБП 19, предназначенный для защиты аппаратуры тренажера от аварийного отключения электропитания, а также от помех и перенапряжений в питающей сети. ИБП 19 позволяет корректно завершить работу тренажера при пропадании сетевого напряжения;
- блок 17 розеток, служащий для подключения к сети 220 В 50 Гц составных частей тренажера;
- коммутатор 21 ЛВС, необходимый для связи блоков 3.1, 7.1, 8.1 системных между собой по локальной вычислительной сети Ethernet;
- нагнетательный вентилятор 18, обеспечивающий охлаждения системных блоков 3.1, 7.1, 8.1 в процессе работы тренажера;
ВИП 20, формирующий стабилизированные постоянные напряжения +5 В и +12 В для питания аппаратуры РМО 6.
Функционирование тренажера поддерживается программным обеспечением, установленным в БС 3.1, 7.1 и 8.1 шкафа 16 приборного.
РМО 6 обеспечивает воспроизведение алгоритма работы имитируемой аппаратуры ПТРК «Хризантема-С», отображение имитируемой ВО канала ОЛСУ на экране ВМ имитатора ИТВ 26 и канала РЛСУ на экране ВМ имитатора МФИ 10.
Пультовая аппаратура РМО 6 размещена аналогично расположению аппаратуры в кабине БМ 9П157 (правый борт). Лицевые панели имитаторов соответствуют лицевым панелям пультовой аппаратуры БМ как по габаритам, так и по расположению органов управления и индикации.
С помощью органов управления имитатора пульта 30 оператора РМО 6 имитируется:
- включение/выключение питания БМ;
- перевод пусковой установки, КОПУ и антенной колонки из походного положения в рабочее и обратно;
- выбор режима работы БМ, типа ракеты и режима ее наведения.
На имитаторе панели 31 индикации одиночные светодиодные индикаторы индицируют включение/выключение соответствующих тумблеров, кнопок и переключателя имитатора пульта 30 оператора, а цифровые индикаторы - количество изделий (ракет) на БМ.
Имитатор ИТВ 26 является устройством отображения из состава имитатора КОПУ 13, выполнен в виде ЖК-монитора и обеспечивает в тренажере реализацию следующих функций:
- отображение служебной информации и прицельной марки;
- изображение местности и целей в телевизионном и тепловизионном каналах;
- прием и реализацию внешнего целеуказания.
В состав имитируемого в тренажере УКПТСУ входят имитаторы ПУДЛ 22, радиостанции 23 и ПМФ 24.
Имитатор ПУДЛ 22 имитирует выбор канала связи и управление внутренней связью БМ, обеспечивает индикацию режимов его работы.
Имитатор радиостанции 23 обеспечивает имитацию включения (выключения) штатной радиостанции БМ 9П157, индикацию рабочего диапазона частот и градации выходной мощности передающего тракта, сигнализацию о нахождении радиостанции в режиме приема и о нормальной работе ее блоков.
Имитатор ПМФ 24 обеспечивает в тренажере реализацию следующих функций:
- отображение на экране монитора поступающей информации;
- отработка внешнего целеуказания;
- реализацию интерфейса работы обучаемого на рабочем месте.
Выбор режимов работы и работа с окнами ПМФ осуществляется с помощью виртуальных кнопок на сенсорном экране ВМ 38 и кнопочных переключателей 39 на лицевой панели имитатора 24.
С помощью имитатора ПМФ 24 обеспечивается работа:
- с комплексами задач «Панель управления оборудованием», «Сбор, обработка и доведение информации о своих войсках, средствах»;
- с окнами «Паспортные данные», «Огневая позиция», «Список боеприпасов» и др.;
- по внешнему целеуказанию с комплексом задач «Управление в ходе боевых действий».
На ВМ 38 имитатора ПМФ при вызове окна «Управление и ориентация машины» отображаются также положения (в виде мнемонической буквенно-цифровой индикации) исполнительных механизмов БМ 9П157 (пусковой установки, антенной колонки, корпуса защиты и т.д.) и индицируются утлы азимута, крена и тангажа БМ, линии визирования КОПУ.
С точки зрения построения вычислительной системы тренажера имитаторы 9-13, 22-24 представляют собой периферийные устройства, для подключения которых к ПЭВМ используются три канала связи на основе промышленного интерфейса RS-485. Первый канал связи организован на основе узлов микро-ЭВМ 28, 32, 40 и преобразователей 29, 33, 41 интерфейсов, выходы которых объединены и подключены к входу RS-485 БС 7.1. Микроконтроллеры узлов 28, 32, 40 микро-ЭВМ осуществляют сканирование в динамическом режиме состояние элементов управления имитаторов ИТВ 26, панели 27, ПО 30 и кнопочных переключателей 39, управляют индикацией элементов индикации имитаторов 27 и 31. Микроконтроллер узла 28 микро-ЭВМ выполняет также преобразование аналоговых сигналов с датчиков команд имитатора пульта 12 управления КОПУ в цифровой код.
На основе микро-ЭВМ 14.1 и преобразователя 14.2 интерфейсов узла связи 14 из состава имитатора 10 МФИ организован второй канал связи, осуществляющий сканирование состояний элементов управления и индикации, преобразование аналоговых сигналов с датчика команд имитатора блока 11 управления маркером РЛ канала в цифровой код.
С помощью микро-ЭВМ 36 и преобразователя 37 интерфейсов из состава имитатора ПУДЛ 22 организован третий канал связи, осуществляющий сканирование состояний элементов управления и управление индикации ей дисплейного модуля 34 и пленочной клавиатуры 35.
Второй и третий каналы связи подключены соответственно к первому и второму входам интерфейса RS-485 БС 8.1 третьей ПЭВМ 8.
Тренажер для подготовки операторов ПТРК с комбинированной системой наведения работает следующим образом.
При подаче питания от промышленной сети 220 В 50 Гц на блок 17 розеток включается в работу ИБП 19, который подает питание на блоки 3.1, 7.1, 8.1 системные, ВМ 3.2 и 3.3 инструктора, коммутатор 21 ЛВС. От ИБП 19 получает питание ВИП 20, с выходов которого подаются питающие напряжения (+5 В, +12 В) на имитаторы 9, 10, 12, 13, 22, 24.
После включения питания в тренажере автоматически проводится начальное тестирование программных и аппаратных средств программой начального тестирования. По окончании тестирования на экране видеомонитора 3.2 появляется основное меню тренажера.
Обучение на тренажере проводится в режимах «Инструктор» и «Обучаемый», в том числе, с возможностью самообучения и самоконтроля оператора.
Выбор режимов работы производится инструктором на видеомониторе управления с помощью клавиатуры или манипулятора «мышь» и организован в виде системы многоуровневых меню. Инструктор управляет процессом обучения: ведет журнал обучаемых, формирует сценарий обучения, устанавливает условия выполнения упражнений, контролирует выполнение задания.
С запуском сценария на выполнение, изображение визуальной обстановки воспроизводится на экранах имитаторов приборов наблюдения РМО и формируется в зависимости от условий выполнения выбранного упражнения, а также состояния органов управления имитаторов пультовой аппаратуры.
Обучаемый, используя имитаторы 9-13 и 24, выполняет действия по подготовке «электронного пуска» и пуску «ракеты» в одном из имитируемых тренажером режимов работы БМ 9П157 (ОЛСУ, РЛСУ или «комбинированном»), определяемым установленным заданием.
С помощью имитаторов 22-24 имитируется внешнее управление противотанковыми формированиями, а также режим внешнего целеуказания, в том числе в автоматизированном режиме, при котором обеспечивается автоматическое наведение линии визирования КОПУ на заданные (по условиям учебной задачи) углы по вертикали и горизонтали.
При работе в режиме ОЛСУ оператор, используя механизм наведения имитатора пульта 12 управления КОПУ 13, совмещает центр прицельной марки (ПМ) с центром имитатора цели (ИЦ). При этом аналоговые сигналы наведения поступают на вход узла 28 микро-ЭВМ, где преобразуются в цифровые коды скорости перемещения фона и ИЦ относительно центра неподвижной ПМ. Полученные коды передаются через преобразователь 29 интерфейсов в системный блок 7.1 второй ПЭВМ 7, где используются для отображения на экране ВМ имитатора ИТВ 26 динамики наведения ПМ на ИЦ. При совмещении центров ПМ и ИЦ оператор нажимает кнопку «Пуск» на имитаторе панели 27 управления. Сигнал имитации пуска обрабатывается микро-ЭВМ 28 и поступает через преобразователь 29 интерфейсов в БС 7.1 для формирования циклограммы процесса наведения ПМ и управления ракетами с момента «пуска» до момента окончания заданного полетного времени. Одновременно БС 8.1 третьей ПЭВМ 8 формируется сигнал звуковой частоты, который поступает на головные телефоны 15, создавая звуковой эффект схода ракеты.
В режиме «Пыль» после измерения дальности до цели одним из способов (лазерным дальномером или методом «база на цели») и нажатии кнопки ПУСК происходит автоматический ввод измеренной дальности в программу «Пыль», в соответствии с которой происходит формирование траектории полета ракеты с превышением.
С помощью кнопок управления имитатора панели 27 управления КОПУ имитируется выбор как телевизионного так и тепловизионного канала ОЛСУ, изменение полярности изображения тепловизионного канала, переключение полей зрения на экране имитатора ИТВ 26, включение/выключение лазерного дальномера и др.
При работе в режиме РЛСУ оператор, используя механизм наведения имитатора пульта 12 управления КОПУ 13, осуществляет поиск цели в заданном секторе ВО по углу азимута и дальности с учетом имитируемого крена БМ в одном из режимов: «4 СТРОКИ», «1 СТРОКА», «±1000», «СЕКТОР 5», а затем, с помощью механизма наведения имитатора блока 11 управления маркером канала РЛСУ совмещает центр маркера с выбранной отметкой от цели.
В соответствии с учебными задачами формируется ВО канала РЛСУ в виде отметок от целей, подстилающей поверхности, различных объектов на поле «боя» с помощью третьей ПЭВМ 8 и отображается на ЖК мониторе имитатора МФИ 10. Одновременно формируется соответствующая служебная информация в виде шкал дальности и азимута, маркера наведения, окна масштабирования и др.
При этом аналоговые сигналы имитации наведения антенной колонки (АК) с имитатора пульта 12 управления КОПУ и маркера с имитатора блока 11 управления маркером РЛСУ преобразуются узлами 28 и 14.1 микро-ЭВМ в цифровые коды скорости перемещения АК и маркера относительно фона и отметок от целей. Полученные коды передаются в БС 7.1 и 8.1, обрабатываются и используются для имитации результата действий оператора по поиску цели и наведению маркера на отметку от цели.
После выполнения операций перевода РЛСУ на режим автосопровождения цели (с помощью кнопки «Автомат» на имитаторе блока 11 управления маркером РЛСУ) оператор нажимает кнопку ПУСК имитатора панели 27 управления КОПУ 13. Сигнал имитации пуска поступает из имитатора 27 на вход узла 28 микро-ЭВМ, преобразуется в соответствующую команду в уровнях сигналов интерфейса RS-485 с помощью преобразователя 29. Блок 7.1 системный принимает кодовый сигнал, по которому имитируется пуск, сопровождаемый звуковым эффектом схода ракеты.
При работе обучаемого в комбинированном режиме пуск первой ракеты осуществляется в канале РЛСУ, а второй - в канале ОЛСУ.
В ходе выполнения задания оператором, на экран контрольного видеомонитора 3.3 РМИ выдается, по выбору инструктора, визуальная информация одного из каналов: ОЛСУ или РЛСУ.
Система контроля и оценки действий обучаемых фиксирует параметры, связанные с поиском целей и стрельбой.
Результаты пусков выдаются на экран видеомонитора 3.2 и вносятся в базы данных ПЭВМ 3.
После завершения упражнения обучаемому автоматически выставляется оценка в зависимости от полученных результатов выполнения.
На предприятии-исполнителе (АО ЦКБА) разработана КД с литерой «O1», изготовлен опытный образец изделия, испытания которого подтвердили его работоспособность и преимущества по сравнению с известными, в том числе с прототипом.
Тренажер принят в составе комплекса «Хризантема-С» с модернизированной БМ 9П157 на снабжение Вооруженных сил РФ, что позволяет сделать вывод о соответствии требованию «промышленная применяемость» для предполагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ РАСЧЕТОВ КОМПЛЕКСА УПРАВЛЯЕМОГО ВООРУЖЕНИЯ | 2006 |
|
RU2328692C1 |
| КОМПЛЕКСНЫЙ ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ СПЕЦИАЛИСТОВ ПОДРАЗДЕЛЕНИЙ РЕАКТИВНЫХ СИСТЕМ ЗАЛПОВОГО ОГНЯ | 2013 |
|
RU2525804C1 |
| УЧЕБНЫЙ ТРЕНАЖЕР КОМАНДНОГО ПУНКТА | 2022 |
|
RU2795343C1 |
| ТРЕНАЖЕР РАСЧЕТА БОЕВОЙ МАШИНЫ | 2023 |
|
RU2831715C1 |
| УЧЕБНЫЙ ТРЕНАЖЕР БОЕВЫХ РАСЧЕТОВ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 2014 |
|
RU2547955C1 |
| УЧЕБНЫЙ ТРЕНАЖЕР БОЕВЫХ РАСЧЕТОВ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА | 2022 |
|
RU2787411C1 |
| Тренажер для подготовки боевых расчетов станции обнаружения целей | 2022 |
|
RU2783557C1 |
| Тренажер для подготовки операторов управляемого вооружения | 2014 |
|
RU2607428C2 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ РАСЧЕТОВ ПУНКТОВ УПРАВЛЕНИЯ ЗЕНИТНЫХ РАКЕТНО-ПУШЕЧНЫХ КОМПЛЕКСОВ | 2013 |
|
RU2544861C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ ОПЕРАТОРОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2024 |
|
RU2826147C1 |
Предлагаемое изобретение относится к техническим средствам обучения и может быть применено в тренажерах для подготовки операторов комплексов управляемого вооружения с целью приобретения, поддержания и совершенствования соответствующих навыков «боевой» работы. Тренажер позволяет готовить операторов комплексов управляемого вооружения с широкими функциональными возможностями на основе современного компьютерного оборудования. Тренажер содержит РМИ 1 на основе стола 2 рабочего, первой ПЭВМ 3 с БС 3.1 и видеомониторами 3.2 и 3.3, клавиатурой 4 и манипулятором 5 «мышь», РМО 6 на основе второй 7 и третьей ПЭВМ 8 соответственно, имитаторы ПО 9, МФИ 10, блока 11 управления маркером РЛ канала наведения, пульта 12 управления КОПУ, КОПУ 13, узел 14 связи, головные телефоны 15 оператора, установленные в шкафу 16 приборном вместе с БС 3.1, 7.1, 8.1 блок 17 розеток, нагнетательный вентилятор 18, ИБП 19, ВИП 20, коммутатор 21 ЛВС, имитаторы ПУДЛ 22, радиостанции 23 и ПМФ 24, при этом РМО 6 выполнено в виде кабины каркасного типа, имитирующей правый борт штатной БМ. В дополнительных пунктах формулы приведено конкретное исполнение блоков и их связи. 5 з.п. ф-лы, 5 ил.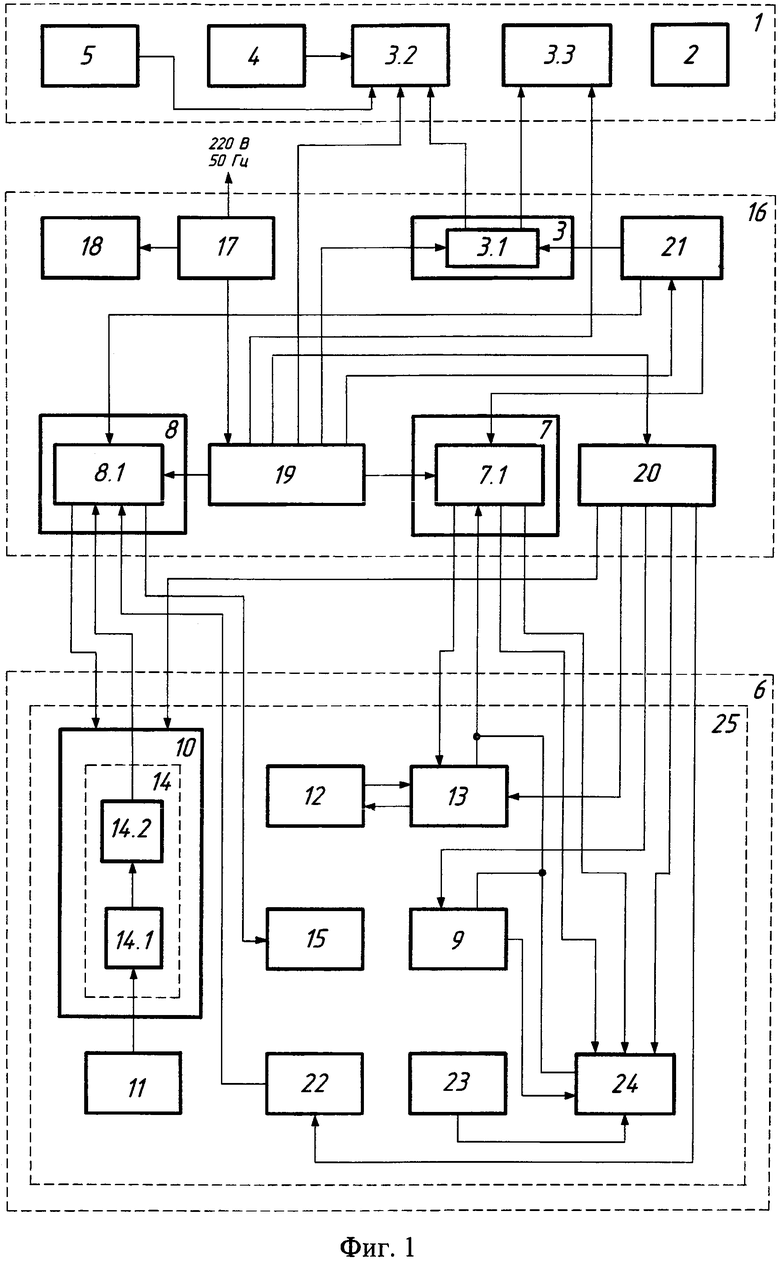
1. Тренажер для подготовки операторов противотанковых ракетных комплексов с комбинированной системой наведения, содержащий рабочее место инструктора на основе стола рабочего на металлическом каркасе с кабель - каналами, первой ПЭВМ с видеомонитором в составе, а также с подключенными к нему клавиатурой и манипулятором «Мышь», рабочее место обучаемого с имитаторами визуальной обстановки оптико-лучевого и радиолокационного каналов наведения ракеты на основе второй и третьей ПЭВМ соответственно, имитаторами пульта оператора боевой машины, многофункционального индикатора, блока управления маркером радиолокационного канала наведения, пульта управления комбинированным оптическим прибором управления, комбинированного оптического прибора управления, узлом связи из состава имитатора многофункционального индикатора на основе последовательно соединенных микроЭВМ и преобразователя интерфейсов, и подключенными к звуковому выходу блока системного третьей ПЭВМ головными телефонами оператора, установленные в шкафу приборном вместе с блоками системными первой - третьей ПЭВМ блок розеток, нагнетательный вентилятор, источник бесперебойного питания, подключенный к первому выходу блока розеток, вторичный источник питания, первый - третий выходы которого соединены с входами питания имитаторов многофункционального индикатора, комбинированного оптического прибора управления и пульта оператора боевой машины соответственно, коммутатор локальной вычислительной сети (ЛВС), подключенный к первому стабилизирующему выходу источника бесперебойного питания, при этом вход блока розеток является входом поступления напряжения питания шкафа приборного и всего тренажера в целом, второй выход блока розеток соединен с входом нагнетательного вентилятора, порты первый, второй и третий коммутатора ЛВС подключены к сетевым выходам LAN блоков системных первой, второй и третьей ПЭВМ соответственно, второй - шестой стабилизирующие выходы источника бесперебойного питания подключены к входам питания блоков системных первой - третьей ПЭВМ, видеомонитора первой ПЭВМ и вторичного источника питания соответственно, выход преобразователя интерфейсов, являющийся выходом имитатора многофункционального индикатора, подключен к первому входу интерфейса RS-485 блока системного третьей ПЭВМ, а вход микроЭВМ, являющийся одновременно входом имитатора многофункционального индикатора, соединен с выходом имитатора блока управления маркером радиолокационного канала наведения, видеовход имитатора многофункционального индикатора подключен к выходу интерфейса DVI блока системного третьей ПЭВМ, отличающийся тем, что в него дополнительно введены имитаторы пульта управления должностного лица, радиостанции и панели многофункциональной из состава аппаратуры унифицированного комплекса программно-технических средств управления противотанковыми формированиями, в состав рабочего места инструктора дополнительно введен второй видеомонитор, подключенный ко второму выходу интерфейса DVI блока системного первой ПЭВМ и запитанный от седьмого стабилизирующего выхода источника бесперебойного питания, рабочее место оператора выполнено в виде кабины каркасного типа, имитирующей правый борт модернизированной боевой машины ПТРК «Хризантема-С», при этом первый и второй выходы интерфейса DVI блока системного второй ПЭВМ подключены к видеовходам имитаторов комбинированного оптического прибора управления и панели многофункциональной соответственно, выход имитатора радиостанции и первый выход имитатора пульта оператора подключены к первому и второму информационным входам имитатора панели многофункциональной соответственно, вход управления сенсорным экраном имитатора панели многофункциональной соединен с выходом интерфейса USB блока системного второй ПЭВМ, вход питания и информационный выход имитатора пульта управления комбинированного оптического прибора управления подключены к цепи питания и информационному входу имитатора комбинированного оптического прибора управления соответственно, параллельно соединенные второй выход имитатора пульта оператора и выходы имитаторов комбинированного оптического прибора управления и панели многофункциональной подключены к входу интерфейса RS-485 блока системного второй ПЭВМ, выход имитатора пульта управления должностного лица подключен ко второму входу интерфейса RS-485 блока системного третьей ПЭВМ, входы питания имитаторов пульта управления должностного лица и панели многофункциональной подключены к четвертому и пятому выходам вторичного источника питания.
2. Тренажер для подготовки операторов противотанковых ракетных комплексов с комбинированной системой наведения по п. 1, отличающийся тем, что имитатор комбинированного оптического прибора управления выполнен в виде имитаторов индикатора телевизионного боевой машины на основе видеомонитора ЖК типа с кнопками регулировки параметров изображения, панели управления комбинированного оптического прибора управления с элементами управления и индикации, последовательно соединенных узла микроЭВМ и преобразователя интерфейсов, при этом вход имитатора индикатора телевизионного, являющийся соответствующим входом видеомонитора, является видеовходом имитатора комбинированного оптического прибора управления, выход преобразователя интерфейсов является соответствующим выходом имитатора комбинированного оптического прибора управления, информационный вход имитатора комбинированного оптического прибора управления является первым информационным входом узла микроЭВМ, вторым и третьим информационными входами которого являются соответственно выходы имитаторов индикатора телевизионного и панели управления с элементами управления и индикации, вход питания имитатора комбинированного оптического прибора управления, подключенный ко второму выходу вторичного источника питания, объединен с входами питания узла микро-ЭВМ, преобразователя интерфейсов, имитаторов индикатора телевизионного и панели управления, и является одновременно цепью питания имитатора пульта управления комбинированного оптического прибора управления.
3. Тренажер для подготовки операторов противотанковых ракетных комплексов с комбинированной системой наведения по п. 1, отличающийся тем, что имитатор пульта оператора боевой машины выполнен в виде имитаторов собственно пульта оператора с органами управления режимами работы и панели индикации с единичными и цифровыми светодиодными индикаторами, а также узла микроЭВМ и преобразователя интерфейсов, при этом выход имитатора собственно пульта оператора является первым выходом имитатора пульта оператора боевой машины, выход преобразователя интерфейсов является вторым выходом имитатора пульта оператора, первый и второй информационные выходы узла микроЭВМ подключены к преобразователю интерфейсов и имитатору панели индикации соответственно, вход питания имитатора пульта оператора подключен к третьему выходу вторичного источника питания и объединен с входами питания узла микроЭВМ, преобразователя интерфейсов и имитатора панели индикации.
4. Тренажер для подготовки операторов противотанковых ракетных комплексов с комбинированной системой наведения по п. 1, отличающийся тем, что в имитаторе пульта управления комбинированным оптическим прибором управления введены тумблер включения режима «ПЫЛЬ» боевой машины 9П157 и кнопка измерения дальности цели лазерным дальномером, электрические цепи которых, являющиеся, в том числе, информационным выходом имитатора пульта управления комбинированного оптического прибора управления, подключены к информационному входу имитатора комбинированного оптического прибора управления.
5. Тренажер для подготовки операторов противотанковых ракетных комплексов с комбинированной системой наведения по п. 1, отличающийся тем, что имитатор пульта управления должностного лица выполнен в виде дисплейного модуля газоразрядного типа, пленочной клавиатуры, узла микроЭВМ и преобразователя интерфейсов, выход которого является выходом имитатора пульта управления должностного лица, при этом пленочная клавиатура подключена к входу узла микроЭВМ, первый и второй выходы которого соединены с входами дисплейного модуля и преобразователя интерфейсов соответственно, вход питания имитатора пульта управления должностного лица объединен с входами питания узла микроЭВМ, преобразователя интерфейсов, дисплейного модуля и пленочной клавиатуры.
6. Тренажер для подготовки операторов противотанковых ракетных комплексов с комбинированной системой наведения по п. 1, отличающийся тем, что имитатор панели многофункциональной выполнен в виде видеомонитора ЖК типа с сенсорным управлением экрана, кнопочных переключателей управления работой панели многофункциональной, узла микроЭВМ и преобразователя интерфейсов, выход которого является выходом имитатора панели многофункциональной, при этом вход преобразователя интерфейсов соединен с выходом узла микроЭВМ, первый и второй входы которого являются соответственно первым и вторым информационными входами имитатора панели многофункциональной, третий вход узла микроЭВМ соединен с кнопочными переключателями управления работой панели многофункциональной, видеовход и вход управления сенсорным экраном видеомонитора являются соответствующими видеовходом и входом управления сенсорным экраном имитатора панели многофункциональной, вход питания имитатора панели многофункциональной объединен с входами питания узла микроЭВМ, преобразователя интерфейсов и видеомонитора
| Машина для добычи мерзлого торфа | 1950 |
|
SU89218A1 |
| Способ определения наличия пламени в горелках, работающих на газообразном топливе | 1956 |
|
SU112990A1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ РАСЧЕТОВ КОМПЛЕКСА УПРАВЛЯЕМОГО ВООРУЖЕНИЯ | 2006 |
|
RU2328692C1 |
| КОМПЛЕКСНЫЙ ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ СПЕЦИАЛИСТОВ ПОДРАЗДЕЛЕНИЙ РЕАКТИВНЫХ СИСТЕМ ЗАЛПОВОГО ОГНЯ | 2013 |
|
RU2525804C1 |
| RU 2006140071 A, 20.05.2008 | |||
| Станок для намотки многозаходных проволочных спиралей на трубы | 1944 |
|
SU67753A1 |

