Настоящее изобретение относится к избирательному способу параллельной работы для измерительных/управляющих устройств. Способ служит для регулирования параллельной работы трансформаторов. Для этого, несколько трансформаторов расположены в параллельном соединении. С каждым из трансформаторов соотнесены измерительное/управляющее устройство и переключатель ступеней (обмоток трансформатора). Все измерительные/управляющие устройства переключателя ступеней соединены посредством соединения связи.
Для параллельного управления трансформаторами со ступенчатым регулированием напряжения известны, по существу, два способа.
Первый способ, так называемое синхронное управление, может осуществляться только для трансформаторов с одинаковым напряжением, мощностью, напряжением короткого замыкания, напряжением ступеней и числом ступеней. В этом способе, все трансформаторы каждой параллельной группы должны устанавливаться в то же самое рабочее положение. Этот способ, известный как ʺспособ ведущий-ведомыйʺ, является единственным методом для параллельного управления однофазными трансформаторами в группе трехфазного тока.
Второй способ, который раскрыт в Европейской патентной заявке ЕР 2 389 723 А2, работает в соответствии с так называемым методом контурного реактивного тока. Этот тип управления параллельной работой в основном применяется при параллельной работе трансформаторов с различным числом ступеней и различными напряжениями ступеней. Способ параллельного управления, наряду с регуляторами напряжения, не требует никаких дополнительных устройств, так что можно отказаться от токоведущих поперечных соединений между измерительными преобразователями. Кроме того, обеспечивается то, что выведенные из параллельной работы трансформаторы не влияют на параллельную работу остальных трансформаторов и не требуют каких-либо изменений в настройках измерительных/управляющих устройств. Все измеренные значения, полученные преобразователями тока или напряжения, теперь выводятся математически. Это дает возможность обеспечить все электрические параметры, необходимые для управления параллельно работающими трансформаторами, с помощью очень простых схем преобразователей. Проводка между измерительными преобразователями и соответствующими измерительными/управляющими устройствами, таким образом, сводится к минимуму, так что и при параллельном управлении трансформаторами, соответственно, требуется только один преобразователь тока и напряжения для каждого трансформатора. Измерительные/управляющие устройства отдельных трансформаторов все связаны друг с другом через CAN-шину. Измеренные значения, таким образом, обмениваются между отдельными измерительными/управляющими устройствами. В том случае, если происходит прерывание CAN-шины, параллельное соединение переходит в аварийный режим или принимает, в наихудшем случае, параллельное соединение от сети.
Международная патентная заявка WO 93/17480 А1 раскрывает устройство для регулирования напряжения при параллельной работе трансформаторов. Каждый трансформатор имеет переключатель ступеней. Он соединен с цифровым регулятором с микропроцессорным управлением (измерительным/управляющим устройством), который регулирует напряжение ступеней. Кроме того, каждый цифровой регулятор имеет интерфейс, посредством которого цифровые регуляторы соединены в кольцо, и цифровые регуляторы через это кольцо обмениваются между собой измеренными и регулирующими значениями. С этими значениями, они регулируют уравнительный ток, протекающий между трансформаторами, до минимума. Переключатели отдельных трансформаторов автоматически приводятся в рабочее положение, в котором контурный реактивный ток между трансформаторами достигает минимума.
Европейская патентная заявка ЕР 0 482 361 А2 раскрывает способ регулирования параллельной работы трансформаторов со ступенчатым регулированием напряжения, которые в любых комбинациях переключения действуют на систему двойной сборной шины. При этом с каждым трансформатором со ступенчатым регулированием напряжения соотнесен отдельный регулятор, который действует на соответствующий моторный привод, который в свою очередь активирует соответствующий переключатель ступеней. В способе, сначала в устройстве параллельного регулирования определяется текущая конфигурация трансформаторов. Затем на это устройство передаются текущие значения амплитуд и фаз напряжения и тока всех трансформаторов со ступенчатым регулированием напряжения, из которых для каждого трансформатора со ступенчатым регулированием напряжения определяется частичный нагрузочный ток и контурный реактивный ток, и на этой основе формируется величина возмущения для соответствующих измерительных/управляющих устройств.
Патент Германии DE 40 04 671 С1 раскрывает способ автоматического, с компьютерной поддержкой, распознавания конфигурации системы с множеством трансформаторов со ступенчатым регулированием напряжения, произвольным образом параллельно подключенных к различным сборным шинам, которые могут иметь различные количества ступеней и различные ступени напряжения, а также ее регулирования. При этом регуляторы, соотнесенные с каждым трансформатором со ступенчатым регулированием напряжения, циклически регистрируют активную и реактивную составляющие тока и напряжения. В задающем регуляторе производится ассоциирование между каждым трансформатором и соответствующей сборной шиной. Затем последовательно для всех сборных шин определяются контурные реактивные токи подключенных к ним трансформаторов. Наконец, скорректированные значения напряжений подаются обратно на регуляторы в качестве новых целевых значений.
Патентная заявка Германии DE 100 39 918 А1 раскрывает само-адаптирующееся регулирование коэффициента мощности (PF-регулирование) для минимизации контурных токов, возникающих в сетях из-за параллельно соединенных трехфазных трансформаторов. Электродвижущая сила (EMK) трансформаторов изменяется в зависимости от определенного значения, которое получают путем сравнения cosφ в точке ввода каждого трансформатора (cosφist) с целевым cosφ сети (cosφsoll), и при этом cosφsoll, однократно корректно введенный при регулировке минимизации контурного тока, самостоятельно адаптируется к последующим временным изменениям сетевых условий.
В основе изобретения лежит задача создать способ для регулирования параллельной работы трансформаторов в случае сбоя связи между измерительными/управляющими устройствами и переключателями ступеней, соотнесенными с трансформаторами, так что при последующей работе параллельно включенных трансформаторов предотвращается риск возникновения слишком высоких контурных реактивных токов, которые приводят к мощности потерь.
Эта задача решается способом, который включает в себя признаки пункта 1 формулы изобретения.
Соответствующий изобретению способ отличается тем, что по меньшей мере одно измеренное значение соответствующего измерительного/управляющего устройства через соединение связи передается на N-1 измерительных/управляющих устройств. На основе измеренных значений измерительных/управляющих устройств выполняется вычисление рассогласования регулирования, которое обусловлено контурным реактивным током, для каждого измерительного/управляющего устройства. Переключатель ступеней, соотнесенный с каждым трансформатором, приводится в действие на основе вычисленного рассогласования регулирования таким образом, что выполняется минимизация контурного реактивного тока для соответствующего трансформатора. В случае, если соединение связи прервано, отсутствие сигнала от по меньшей мере одного из измерительных/управляющих устройств индицируется и устанавливается всеми остальными измерительными/управляющими устройствами. Определяется рассогласование регулирования, необходимое для минимизации контурного реактивного тока по меньшей мере одного трансформатора, затронутого прерыванием соединения связи. Это осуществляется с помощью измеренных значений, принятых по соединению связи перед некоторым моментом времени, которые передавались от соответствующего измерительного/управляющего устройства от по меньшей мере одного другого трансформатора. При этом данное по меньшей мере одно измерительное/управляющее устройство не затронуто прерыванием. Для затронутого прерыванием измерительного/управляющего устройства, собственные, измеряемые в текущее время значения совместно включаются в определение рассогласования регулирования.
Преимущество соответствующего изобретению способа заключается в том, что процесс регулирования для отдельных трансформаторов параллельного соединения продолжается, и соотнесенные с отдельными трансформаторами переключатели ступеней снабжаются соответствующими управляющими сигналами, чтобы минимизировать контурный реактивный ток для отдельных трансформаторов или привести его к 0, если это возможно.
Измеренные значения соответствующих трансформаторов, измеряемые на каждом измерительном/управляющем устройстве параллельного соединения, в одной форме выполнения, представляют собой изменяющийся во времени активный ток и изменяющийся во времени реактивный ток.
Измеренные значения тех измерительных/управляющих устройств, которые изолированы из-за прерывания соединения связи, выполняют за промежуток времени прерывания вычисление требуемого рассогласования регулирования для минимизации контурного реактивного тока с собственными измеренными в текущее время значениями и с измеренными значениями остальных измерительных/управляющих устройств, переданными последними перед прерыванием, считающимися постоянными к моменту времени прерывания. Таким образом, динамика регулирования параллельной работой параллельного соединения всех трансформаторов параллельного соединения поддерживается. Затронутое прерыванием измерительное/управляющее устройство ʺизолированного трансформатораʺ, таким образом, берет на себя последние значения, измеренные соответствующими измерительными/управляющими устройствами соответствующих трансформаторов (т.е. переданные к ʺизолированному трансформаторуʺ).
Одна возможность осуществления способа состоит в том, что в случае полного прерывания связи одного измерительного/управляющего устройства с другими измерительными/управляющими устройствами, данное измерительное/управляющее устройство продолжает выполнять метод минимизации контурного реактивного тока в соответствии с изобретением с последними измеренными значениями других измерительных/управляющих устройств. До тех пор, пока измерительное/управляющее устройство еще имеет связь с по меньшей мере одним другим измерительным/управляющим устройством, они будут продолжать выполнять метод минимизации контурного реактивного тока только с еще осуществляющими связь измерительными/управляющими устройствами. Возможно, что другие затронутые сбоем связи измерительные/управляющие устройства не принимаются во внимание по-прежнему осуществляющими связь измерительными/управляющими устройствами.
В соответствии с одним вариантом осуществления способа, вычисление рассогласования регулирования для минимизации контурного реактивного тока в тех измерительных/управляющих устройствах, которые все еще соединены друг с другом через соединение связи, осуществляется с собственными измеряемыми в текущее время значениями и измеряемыми в текущее время значениями остальных измерительных/управляющих устройств, все еще соединенных через соединение связи.
В соответствии с другим возможным вариантом осуществления способа, вычисление рассогласования регулирования для минимизации контурного реактивного тока в тех измерительных/управляющих устройствах, которые все еще соединены друг с другом через соединение связи, осуществляется с собственными измеряемыми в текущее время значениями и измеряемыми в текущее время значениями остальных измерительных/управляющих устройств, все еще соединенных через соединение связи. Кроме того, измерительные/управляющие устройства, которые все еще соединены друг с другом посредством соединения связи, применяют считающиеся постоянными измеренные значения измерительных/управляющих устройств, рассматриваемых как изолированные измерительные/управляющие устройства из-за прерывания соединения связи в момент времени или последовательность моментов времени.
Это имеет преимущество, состоящее в том, что большее количество измеренных значений применяется для вычисления рассогласования регулирования для минимизации контурного реактивного тока. Так, измерительные/управляющие устройства применяют измеряемые в текущее время значения и измеренные значения, рассматриваемые с некоторого момента времени параллельного регулирования как постоянные. Рассматриваемые в качестве постоянных измеренные значения получают от по меньшей мере одного измерительного/управляющего устройства, которое не имеет соединения связи с другими измерительными/управляющими устройствами параллельного соединения трансформаторов. Измеренные значения, переданные в другое измерительное/управляющее устройство перед моментом времени прерывания, применяются для дальнейшего процесса регулирования. Если другие измерительные/управляющие устройства теряют соединение связи с измерительными/управляющими устройствами, еще соединенными через соединение связи, то для процесса регулирования используются те измеренные значения, которые перед моментом времени прерывания отправлялись измерительными/управляющими устройствами, которые теперь должны рассматриваться как изолированные.
В другом варианте осуществления, число трансформаторов, предусмотренных в параллельном соединении, больше или равно 2 и меньше или равно 16.
Согласно одному варианту осуществления способа, сигнал, передаваемый по соединению связи от измерительного/управляющего устройства, состоит из сигнала готовности соответствующего измерительного/управляющего устройства и измеренных значений соответствующих измерительных/управляющих устройств. При этом отсутствие сигнала готовности и/или отсутствие измеренных значений от соответствующего измерительного/управляющего устройства указывает прерывание. Это указывает на то, что затронутое прерыванием по меньшей мере одно измерительное/управляющее устройство изолировано, и измеренные значения, отправленные от данного измерительного/управляющего устройства перед моментом времени прерывания, должны приниматься для процесса регулирования как постоянные.
Сигнал готовности, передаваемый от измерительных/управляющих устройств, может передаваться с более высокой или той же частотой, что и частота передачи измеренных значений от измерительных/управляющих устройств.
Преимуществом настоящего изобретения является то, что измерительное/управляющее устройство на трансформаторе [n] параллельного соединения не блокируется. Только [п-1] - доля в сумме частичных токов (составляющая реактивного тока, а также составляющая активного тока) рассматривается как постоянная. Однако это применимо только для того измерительного/управляющего устройства, которое непосредственно соотнесено с трансформатором [n]. Это измерительное/управляющее устройство не имеет никакой связи и включает только собственную измеряемую составляющую реактивного тока IBi и активного тока IWi, где i=1, … N, в вычисление фазового угла нагрузки.
Таким образом, справедливо:

причем 
и

причем 
Вследствие этого риск возникновения контурных реактивных токов заметно снижается также потому, что все другие измерительные/управляющие устройства могут работать в соответствии с той же самой расчетной формулой, и по меньшей мере частичная динамика контура регулирования сохраняется.
Дополнительный контроль диапазона напряжения является еще одним средством для защиты рабочего состояния параллельно работающих трансформаторов в случае сбоя связи.
Измерительное/управляющее устройство предпочтительно выполнено в виде регулятора напряжения переключателя ступеней.
Изобретение и его преимущества описаны более подробно ниже со ссылкой на прилагаемые чертежи, на которых показано следующее:
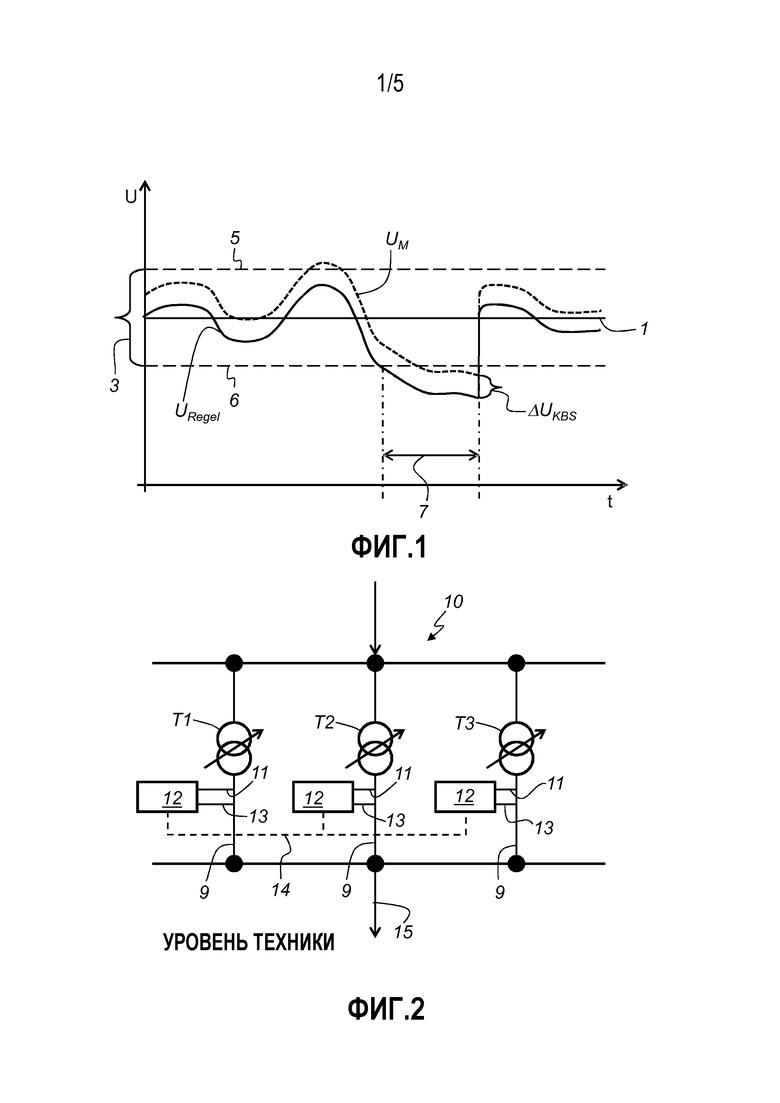
Фиг. 1 - временная характеристика напряжения, измеренного на трансформаторе параллельного соединения, и регулирующего напряжения;
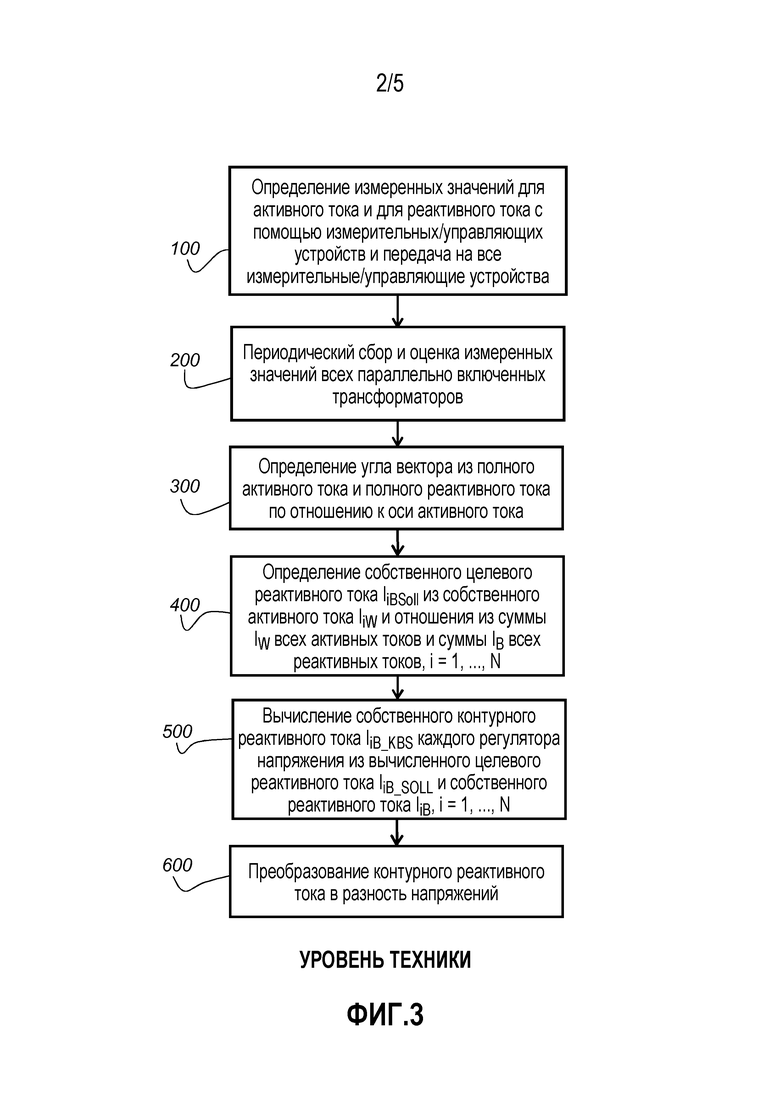
Фиг. 2 - схематичное представление известного из уровня техники параллельного соединения трех трансформаторов;
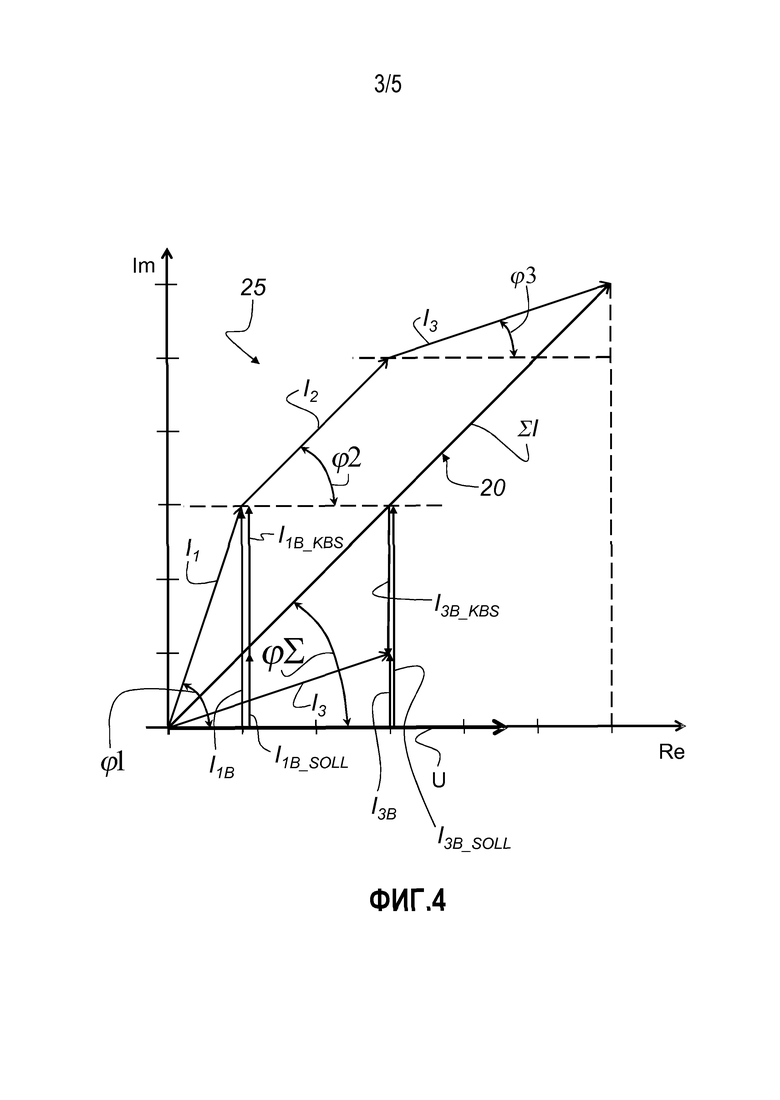
Фиг. 3 - блок-схема последовательности операций известного из уровня техники способа для параллельного управления множеством трансформаторов с переключателями ступеней;
Фиг. 4 - схематичное представление для определения угла ϕΣ вектора из полного активного тока и полного реактивного тока в электрической векторной диаграмме;
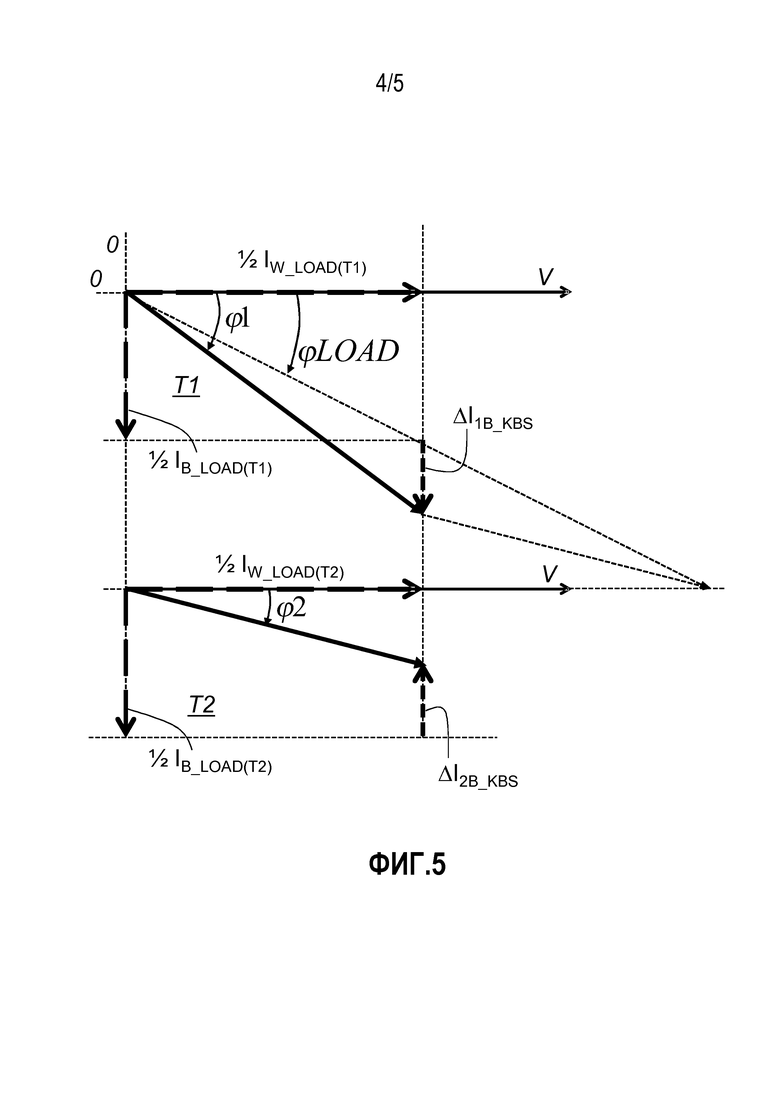
Фиг. 5 - схематичное представление условий нагрузки и соответствующего результирующего рассогласования регулирования при параллельной работе двух трансформаторов; и
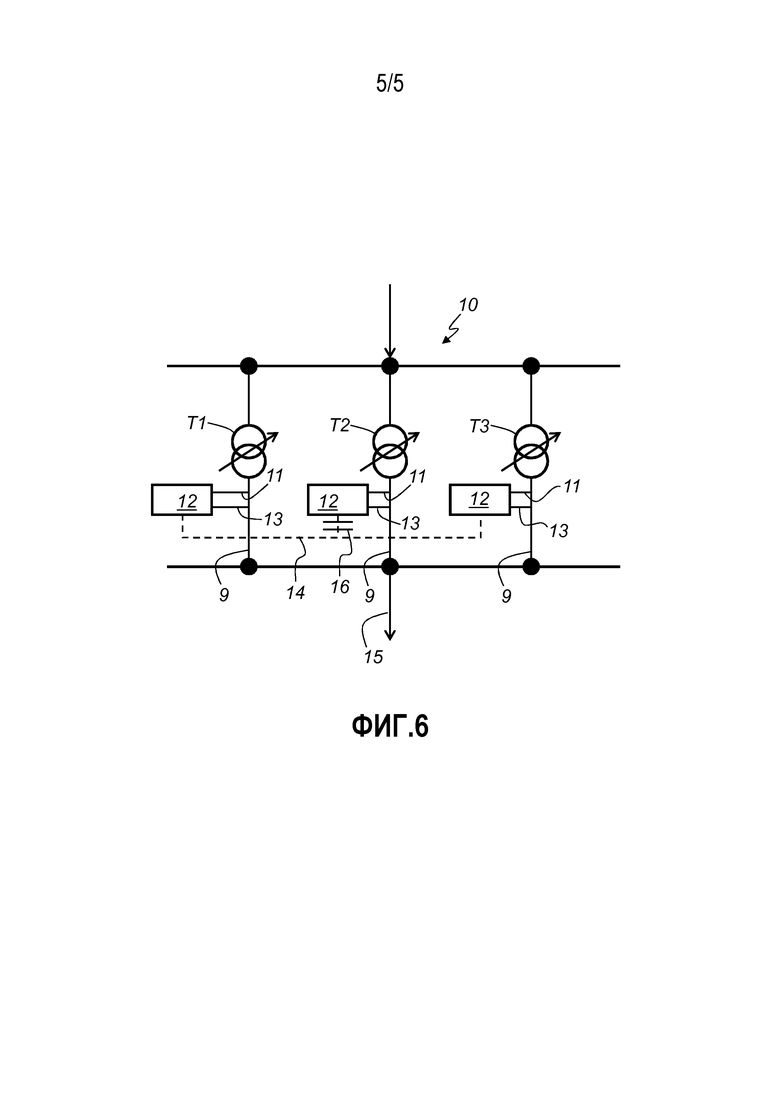
Фиг. 6 - схематичное представление параллельного соединения трех трансформаторов согласно фиг. 3, в котором применяется способ согласно изобретению, и только измерительное/управляющее устройство переключателя ступеней второго трансформатора затронуто прерыванием.
На чертежах одинаковые ссылочные позиции используются для идентичных или одинаково действующих элементов согласно изобретению. Кроме того, для наглядности, на отдельных фигурах приведены только те ссылочные позиции, которые необходимы для описания соответствующей фигуры.
На фиг. 1 показана временная характеристика измеренного напряжения UM трансформатора параллельного соединения трансформаторов, которое при рассмотрении во времени находится в интервале 3, определенном верхним уровнем 5 напряжения и нижним уровнем 6 напряжения. Между верхним уровнем 5 напряжения и нижним уровнем 6 напряжения находится целевое значение 1 напряжения, относительно которого может колебаться регулируемое напряжение URegel, не приводя к тому, что переключатель ступеней переключит вторичную сторону трансформатора на одну или несколько ступеней выше или переключит вторичную сторону трансформатора на одну или несколько ступеней ниже. Переключатель ступеней переключается только тогда, когда регулируемое напряжение URegel в течение предопределенного временного интервала 7 превышает верхний уровень 5 напряжения или спадет ниже нижнего уровня 6 напряжения. Как показано на фиг. 1, при работе переключателя отводов, регулируемое напряжение URegel будет приводиться вновь в интервал 3. Как также показано на фиг. 1, регулируемое напряжение UREGEL составляется из измеренного напряжения UM, составляющей ΔUKBS напряжения на основании контурного реактивного тока и компенсационной составляющей ΔUΚΟΜΡ напряжения. Для регулируемого напряжения UREGEL справедливо:

На фиг. 2 показано схематичное представление параллельного соединения 10 трех трансформаторов Т1, Т2 и Т3. Хотя следующее описание для соответствующего изобретению способа касается трех трансформаторов, это не должно быть истолковано как ограничение. Для специалиста будет понятно, что изобретение также применимо для любого нескольких трансформаторов Т1, Т2, … TN, по существу, одинакового типа. В соответствии с предпочтительным вариантом осуществления, по меньшей мере 2 и максимум 16 трансформаторов соединены параллельно. С каждым отводом 9 каждого трансформатор T1, T2 и T3 соотнесено измерительное/управляющее устройство 12. Измерительное/управляющее устройство 12 выполняет измерение 11 тока и измерение 13 напряжения на отводе 9 каждого трансформатора T1, T2 и T3. Кроме того, измерительные/управляющие устройства 12 отдельных трансформаторов Т1, Т2 и Т3 соединены друг с другом посредством общего соединения 14 связи. Соединение 14 связи может быть, например, CAN-шиной.
Измерение тока и напряжения соответствующим измерительным/управляющим устройством 12 осуществляется не на основе фактически приложенного напряжения, например 230 кВ, и протекающего тока примерно 100 А. Для измерения напряжения используется ʺпреобразователь напряженияʺ (не показан), который уменьшает напряжение от, например, 230 кВ до, например, 100 В. Для измерения тока используется ʺпреобразователь токаʺ (не показан), который уменьшает ток от, например, 100А до, например, 1 А. Вторичное номинальное напряжение UVT_SECТ преобразователя напряжения и вторичный номинальный ток ICT_SEC преобразователя тока входят в дальнейшее вычисление.
Сначала, в общем, поясняется способ, показанный на фиг. 3. С помощью представленного на фиг. 2 параллельного соединения трех трансформаторов Т1, Т2 и Т3 выполняется параллельное управление, чтобы поддерживать реактивный ток как можно более низким, примерно на нуле. Реактивный ток тогда равен нулю, когда углы токов всех трансформаторов равны углу полного тока. Способ включает в себя несколько отдельных этапов способа.
Сначала, на первом этапе 100 способа, каждое измерительное/управляющее устройство 12 определяет собственные измеренные значения для активного тока I1W, I2W и I3W и для реактивного тока I1B, I2B и I3B и передает на другие измерительные/управляющие устройства 12 других трансформаторов Т1, Т2 и T3.
На втором этапе 200 способа, измеренные значения всех параллельно соединенных трансформаторов Т1, Т2 и Т3 периодически собирают и оценивают. Для этого этапа способа решающим является тот факт, что с каждым параллельно соединенным трансформатором Т1, Т2 и Т3 соотнесено собственное измерительное/управляющее устройство 12, и что все измерительные/управляющие устройства 12 связаны между собой общим соединением 14 связи, например, CAN-шиной для обмена информацией. Эта так называемая CAN-шина (Controller Area Network - контроллерная сеть) предоставляет, наряду с высокой скоростью передачи при простом монтаже, максимальную надежность передачи. Все измерительные/управляющие устройства 12 могут, таким образом, обмениваться информацией с другими измерительными/управляющими устройствами 12 параллельно соединенных трансформаторов Т1, Т2 и Т3.
Затем, на третьем этапе 300 способа, из собранных измеренных значений, вектор 20 из полного активного тока и полного реактивного тока вводится в электрическую векторную диаграмму (см. фиг. 4). Вектор 20 образует угол ϕΣ с Х-осью электрической векторной диаграммы.
Каждое измерительное/управляющее устройство 12 определяет сумму ΣIW всех активных токов и сумму ΣIВ реактивных токов всех параллельно соединенных трансформаторов Т1, Т2 и Т3.
I1W+I2W+I3W+…+INW=ΣIW Уравнение (2)
и
I1В+I2В+I3В+…+INВ=ΣIВ Уравнение (3)
Затем, на четвертом этапе 400, каждым измерительным/управляющим устройством 12 определяется собственный целевой реактивный ток I1BSoll из собственного активного тока I1W и отношения суммы ΣIW всех активных токов и суммы ΣIВ всех реактивных токов.
В предположении, что при переключении переключателя ступеней в одном из этих параллельно соединенных трансформаторов Т1, Т2, …, Т3 изменяется, например, только реактивный ток I1В через соответствующий трансформатор Т1 (подключенная нагрузка остается постоянной), и измерительное/управляющее устройство 12 знает активный ток I1W соответствующего трансформатора Т1, можно теперь вычислить высоту реактивного тока I1BSOLL, который был бы необходим, чтобы вместе с измеренным активным током I1W, стать параллельным с вектором 20 из полного активного тока и полного реактивного тока.
На пятом этапе 500 способа осуществляется вычисление собственного контурного реактивного тока I1B_KBS каждого измерительного/управляющего устройства 12 из вычисленного целевого реактивного тока I1B_SOLL и собственного реактивного тока I1В. Здесь следует отметить, что хотя вычисление здесь и в дальнейшем конкретно описано только для i=1, то есть для трансформатора Т1, однако вычисление по аналогии выполняется для всех других трансформаторов Т1, Т2,…, TN, i=1,…, N, параллельного соединения.
В результате предыдущего этапа 500 способа, измерительное/управляющее устройство 12 знает целевой реактивный ток I1B_SOLL, который требует нагрузка, и величину реактивного тока I1В, который предоставляет для этого соответствующий трансформатор Т1.
Из разности целевого реактивного тока I1B_SOLL и реактивного тока I1В соответствующего трансформатора можно теперь вычислить контурный реактивный ток с учетом знаков обоих токов:



Приведенные выше уравнения иллюстрируют вычисление соответствующего контурного реактивного тока I1B_KBS, I2B_KBS и I3B_KBS для трех параллельно соединенных трансформаторов Т1, Т2 и Т3 (см. фиг. 2).
Эта разность между номинальным реактивным током I1B_SOLL и реактивным током I1В трансформатора Т1 равна контурному реактивному току I1B_KBS и должна перед приведением в действие переключателя ступеней в соответствующем трансформаторе Т1, Т2,…, TN, здесь конкретно Т1, сводиться к минимуму. I1B_KBS представляет собой рассогласование регулирования для трансформатора T1.
На шестом этапе 600, из I1B_KBS путем преобразования выводится разность ΔUKBS напряжения.
Если рассогласование регулирования не равно нулю, и высота рассогласования регулирования превышает заранее заданное предельное значение, то измерительное/управляющее устройство 12 будет побуждать переключатель ступеней к тому, чтобы он переключался в положение или отвод соответствующего трансформатора, на котором реактивный ток I1В через трансформатор T1 является минимальным, в лучшем случае равен нулю. Путем приведения в действие переключателя ступеней, по существу, оказывается влияние на индуктивную составляющую тока, протекающего через соответствующий трансформатор Т1, Т2,…, TN. Это означает, что увеличение и уменьшение продольного импеданса соответствующего трансформатора Т1, Т2,…, TN противодействует контурному реактивному току I1B_KBS.
При приведении в действие переключателя ступеней витки регулировочной обмотки подключаются к основной обмотке или отключаются от нее.
Так как это рассогласование регулирования каждого из соединенных параллельно измерительных/управляющих устройств 12 вычисляется для соответствующего трансформатора Т1, Т2, Т3 с учетом знака, все измерительные/управляющие устройства 12 побуждают свои переключатели ступеней, соотнесенные с трансформаторами Т1, Т2 или Т3, переходить в положение переключателя ступеней, в котором соответствующий контурный реактивный ток I1B_KBS, I2B_KBS и I3B_KBS является минимальным, предпочтительно равным нулю.
При этом один переключатель ступеней может переводиться на более высокое положение переключателя ступеней, в то время как другие переключатели ступеней переводятся в более низкое положение.
Для представления угла ϕΣ вектора 20 из собранных измеренных значений полного активного тока и полного реактивного тока по отношению к Х-оси можно сослаться на представленную на фиг. 4 электрическую векторную диаграмму. Для этого, измеренные значения для активного тока для трех трансформаторов Т1, Т2 и Т3 принимают следующие значения (см. таблицу 1) для соответствующего активного тока IW и соответствующего реактивного тока IВ.
Таблица 1
[активный
ток]
[реактивный
ток]
Таким образом, получается, как показано на фиг. 4, для суммы ΣIW всех активных токов и суммы ΣIВ всех реактивных токов, соответственно, значение 6А. Целью параллельного регулирования трансформаторов Т1, Т2 или Т3 является то, чтобы составляющие соответствующих активных токов I1W, I2W или I3W и составляющие соответствующих реактивных токов I1В, I2В или I3В изменять таким образом, что их угол к оси W активного тока в электрической векторной диаграмме 25 принимал одно и то же значение. В представлении на фиг. 4, ϕ1>ϕΣ, ϕ2=ϕΣ и ϕ3<ϕΣ. Поскольку с помощью переключателей ступеней трансформаторов Т1, Т2 или Т3 отводы на трансформаторах соединяются в зависимости от измеренных значений, достигается адаптация или минимизация контурного реактивного тока. Может вычисляться рассогласование регулирования тока ΔIN_KBS для каждого измерительного/управляющего устройства 12 трансформатора Т1, Т2,…, TN. Это рассогласование регулирования, таким образом, получается из рассмотрения отдельных токов I1, I2 и I3, в частности, их векторов в векторной диаграмме.
В результате, через все параллельно соединенные трансформаторы по окончании процесса регулирования всегда протекает минимальный контурный реактивный ток.
На фиг. 5 показано схематичное представление условий нагрузки и соответствующее результирующее рассогласование при параллельной работе двух трансформаторов Т1 и Т2. Фазовый угол ϕLOAD (соответствует ϕΣ из фиг. 4) на нагрузке 15 параллельного соединения обоих трансформаторов Т1 и Т2 предопределяется их свойствами и не может подвергаться влиянию посредством измерительного/управляющего устройства 12 и связанного с ним трансформатора Т1 или Т2.
Переключатель ступеней, который соотнесен с каждым трансформатором Т1 и Т2, оказывает влияние в качестве продольного регулятора, по существу, только на индуктивную составляющую (реактивный ток) протекающего через трансформатор T1 или T2 полного тока. Это обусловлено соотношением, что индуктивная составляющая (реактивный ток) существенно больше, чем активная составляющая (активный ток).
Рассогласование регулирования ΔI1B_KBS или ΔI2B_KBS для данного измерительного/управляющего устройства 12 соотнесенного и параллельно работающего трансформатора Т1 или Т2 вычисляется на основе рассмотрения реактивных токов для каждого отдельного трансформатора Т1 или Т2:

При этом 
Аналогичным образом, справедливо:

При этом 
Рассогласование регулирования будет тогда наименьшим (идеально равно нулю), когда измеренный фазовый угол ϕ1 или ϕ2 в первом трансформаторе Т1 или во втором трансформаторе Т2 равен таковому нагрузки ϕLOAD (соответствует ϕΣ из фиг. 4) параллельного соединения первого трансформатора Т1 или второго трансформатора Т2.
Это достигается за счет изменения продольного импеданса соответствующего трансформатора Т1 или Т2 посредством переключателя ступеней, который соотнесен с каждым из трансформаторов Т1 и Т2. За счет приведения в действие переключателя ступеней витки регулировочной обмотки подключаются к основной обмотке или отключаются от нее.
На фиг. 6 показано схематичное представление параллельного соединения 10 трех трансформаторов согласно фиг.3, в котором соответствующий изобретению способ продолжает осуществляться, несмотря на прерывание 16 соединения 14 связи. По соединению 14 связи каждое из измерительных/управляющих устройств соответствующих трансформаторов Т1, Т2 и Т3 получает с регулярными временными интервалами информации об измеренных значениях IW (активного тока) и IВ (реактивного тока) остальных трансформаторов Т1, Т2 и Т3. Во время работы, как упомянуто выше, на основе измеренных значений, параллельное соединение 10 трансформаторов Т1, Т2 и Т3 управляется таким образом, что контурный реактивный ток индивидуальных трансформаторов Т1, Т2 и Т3 минимален, предпочтительно равен нулю. Каждое из измерительных/управляющих устройств 12 получает через соединение 14 связи информацию других измерительных/управляющих устройств 12, которые все еще доступны через соединение 14 связи. С этой целью, все измерительные/управляющие устройства 12 передают с определенными временными интервалами сигнал (сигнал готовности). Если от одного или нескольких измерительных/управляющих устройств 12 больше не поступает сигнал, то это указывает на то, что одно или несколько измерительных/управляющих устройств 12 больше не достижимы, и что имеет место прерывание 16 соединения 14 связи.
В представлении, показанном на фиг. 6, прерывание 16 соединения 14 связи происходит, например, на измерительном/управляющем устройстве 12 второго трансформатора Т2. Это означает, что никакая информация на измерительное/управляющее устройство 12 второго трансформатора Т2 не может передаваться от измерительного/управляющего устройства 12 первого трансформатора Т1 и измерительного/управляющего устройства 12 третьего трансформатора Т3. В свою очередь, измерительные/управляющие устройства 12 первого трансформатора Т1 и третьего трансформатора Т3 не принимают никакую информацию от измерительного/управляющего устройства 12 второго трансформатора Т2. Это означает, что оба измерительных/управляющих устройства 12 первого трансформатора Т1 и третьего трансформатора Т3 продолжают выполнять установку минимального контурного реактивного тока без учета значений измерительного/управляющего устройства 12 второго трансформатора Т2, так как от него, ввиду прерывания 16, не предоставляются никакие измеренные значения.
Измерительное/управляющее устройство 12 второго трансформатора Т2 продолжает выполнять способ для установки минимального контурного реактивного тока с применением последних переданных значений измерительных/управляющих устройств 12 первого трансформатора Т1 и третьего трансформатора Т3.
Преимущество настоящего изобретения состоит в том, что измеренные значения отказавшего из-за прерывания 16 измерительного/управляющего устройства 12 принимаются другими измерительными/управляющими устройствами 12 в качестве постоянных. Таким образом, трансформатор, в котором происходит прерывание 16 измерительного/управляющего устройства 12, продолжает приниматься во внимание в параллельной работе. То измерительное/управляющее устройство 12, которое больше не имеет никакой связи с другими измерительными/управляющими устройствами 12, принимает последние значения других измерительных/управляющих устройств 12 в качестве постоянных и продолжает выполнять метод минимизации контурного реактивного тока. Измерительные/управляющие устройства 12, которые еще имеют связь с по меньшей мере одним другим измерительным/управляющим устройством 12, продолжают выполнять метод минимизации контурного реактивного тока, а именно, только с участвующими в осуществлении связи измерительными/управляющими устройствами 12.
Другими словами, в конкретно описанном случае, это означает, что второй (изолированный) трансформатор Т2 управляется с помощью последних переданных через соединение 14 связи измеренных значений посредством относящегося к нему измерительного/управляющего устройства 12.
С помощью предложенного выше улучшенного решения (см. фиг. 6) измерительное/управляющее устройство 12 на втором трансформаторе Т2 не будет блокироваться. В представленном здесь случае, доля в сумме частичных токов (реактивный ток, а также активный ток) от измерительного/управляющего устройства 12 первого трансформатора Т1 и измерительного/управляющего устройства 12 и третьего трансформатора Т3 должна рассматриваться как постоянная.
Вследствие этого, риск возникновения контурных реактивных токов заметно снижается, отчасти потому, что все остальные измерительные/управляющие устройства 12 могут работать в соответствии с той же самой формулой расчета, и частичная динамика контура регулирования сохраняется несмотря на прерывание.
Как можно видеть из приведенных выше уравнений, в вычисление ΔUKBS для случая прерывания соединения 4 связи включены значения для активного тока IW и реактивного тока IB, определенные перед прерыванием. Эти значения остаются постоянными до восстановления соединения 14 связи, так что и за промежуток времени прерывания может вычисляться сумма ΣIW всех активных токов и сумма ΣIВ всех реактивных токов.
Изобретение было описано со ссылкой на вариант осуществления. Специалисту в данной области техники должно быть понятно, что изменения и модификации могут быть выполнены без отступления от объема защиты нижеследующей формулы изобретения.
Использование: в области электротехники. Технический результат - регулирование параллельной работы трансформаторов в случае сбоя связи между измерительными/управляющими устройствами и переключателями ступеней, соотнесенными с трансформаторами, что предотвращает риск возникновения слишком высоких контурных реактивных токов, которые приводят к мощности потерь. Раскрыт способ регулирования параллельной работы нескольких трансформаторов (Т1, Т2,…, TN) в параллельном соединении (10), причем с каждым из трансформаторов (Т1, Т2,…, TN) соотнесено измерительное/управляющее устройство (12), и все измерительные/управляющие устройства (12) соединены между собой через соединение (14) связи. При отсутствии сигнала готовности от по меньшей мере одного измерительного/управляющего устройства (12) индицируется прерывание (16) соединения (14) связи. Определенные в момент времени (t) прерывания измеренные значения остаются в течение промежутка времени прерывания (16) постоянными и включаются во время прерывания (16) в вычисление рассогласования регулирования для минимизации контурного реактивного тока трансформаторов (Т1, Т2, …, TN). 8 з.п. ф-лы, 6 ил., 1 табл.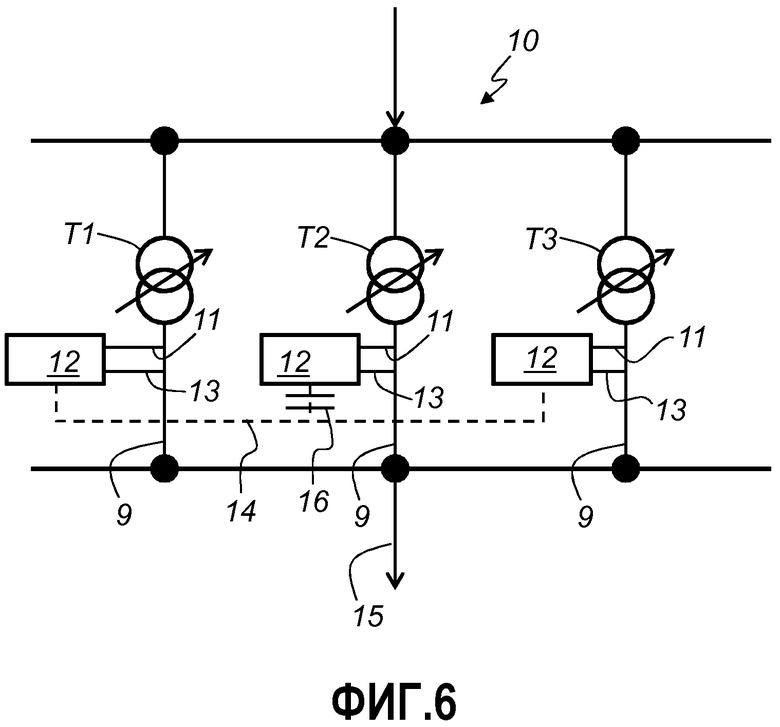
1. Способ регулирования параллельной работы нескольких трансформаторов (Т1, Т2,…, TN) в параллельном соединении (10), причем с каждым из трансформаторов (Т1, Т2,…, TN) соотнесен переключатель ступеней с измерительным/управляющим устройством (12), и все измерительные/управляющие устройства (12) соединены между собой через соединение (14) связи;
отличающийся следующими этапами:
по меньшей мере одно измеренное значение соответствующего измерительного/управляющего устройства (12) соответствующих трансформаторов (Т1, Т2, …, TN) через соединение (14) связи передают на N-1 измерительных/управляющих устройств (12);
на основе измеренных значений измерительных/управляющих устройств (12) выполняют вычисление рассогласования регулирования, которое обусловлено контурным реактивным током, для каждого измерительного/управляющего устройства (12);
соотнесенный с каждым трансформатором (Т1, Т2, …, TN) переключатель ступеней на основе вычисленного рассогласования регулирования с помощью измерительного/управляющего устройства (12) приводят в действие таким образом, что выполняется минимизация контурного реактивного тока для соответствующего трансформатора (Т1, Т2, …, TN);
отсутствие по меньшей мере одного сигнала от по меньшей мере одного измерительного/управляющего устройства (12) вызывают прерыванием (16) соединения (14) связи в момент времени (t), и отсутствие по меньшей мере одного сигнала от по меньшей мере одного измерительного/управляющего устройства (12) устанавливают всеми остальными измерительными/управляющими устройствами (12);
требуемое для минимизации контурного реактивного тока рассогласование регулирования по меньшей мере одного затронутого прерыванием (16) соединения (14) связи измерительного/управляющего устройства (12) трансформатора (Т1, Т2, …, TN) определяют с помощью измеренных значений, принятых по соединению (14) связи перед моментом времени (t), которые передавались от соответствующего измерительного/управляющего устройства (12) по меньшей мере одного другого трансформатора (Т1, Т2, …, TN), причем в определение включают собственные, измеряемые в текущее время значения затронутого прерыванием измерительного/управляющего устройства (12) по меньшей мере одного трансформатора.
2. Способ по п. 1, причем измеренные значения соответствующих трансформаторов (Т1, Т2, …, TN), измеряемые на каждом измерительном/управляющем устройстве (12) параллельного соединения (10), представляют собой, соответственно, изменяющийся во времени активный ток (I1W, I2W, …, INW) и изменяющийся во времени реактивный ток (I1В, I2В, …, INВ).
3. Способ по п. 1, причем измерительные/управляющие устройства (12), которые изолированы из-за прерывания (16) соединения (14) связи, за промежуток времени прерывания (16) в вычислении требуемого рассогласования регулирования для минимизации контурного реактивного тока применяют собственные измеряемые в текущее время значения и измеренные значения остальных измерительных/управляющих устройств (12), считающиеся постоянными в момент времени (t) прерывания, так что динамика регулирования параллельной работы параллельного соединения (10) всех трансформаторов (Т1, Т2, …, TN) параллельного соединения (10) поддерживается.
4. Способ по п. 3, причем для тех измерительных/управляющих устройств (12), которые все еще соединены между собой через соединение (14) связи, для вычисления требуемого рассогласования регулирования для минимизации контурного реактивного тока включаются собственные измеряемые в текущее время значения и измеряемые в текущее время значения остальных все еще соединенных через соединение (14) связи измерительных/управляющих устройств (12).
5. Способ по п. 3, причем для тех измерительных/управляющих устройств (12), которые все еще соединены через соединение (14) связи друг с другом, для вычисления требуемого рассогласования регулирования для минимизации контурного реактивного тока включаются собственные измеряемые в текущее время значения, измеряемые в текущее время значения других все еще соединенных через соединение (14) связи измерительных/управляющих устройств (12), и считающиеся постоянными измеряемые значения измерительных/управляющих устройств (12), считающихся изолированными к моменту времени (t) из-за прерывания (16) соединения (14) связи.
6. Способ по любому из предыдущих пунктов, причем число трансформаторов (Т1, Т2, …, TN), предусмотренных в параллельном соединении (10), составляет по меньшей мере 2 и меньше или равно 16.
7. Способ по любому из предыдущих пунктов, причем передаваемый по соединению (14) связи сигнал от измерительного/управляющего устройства (12) состоит из сигнала готовности соответствующего измерительного/управляющего устройства (12) и измеренных значений соответствующего измерительного/управляющего устройства (12).
8. Способ по п. 7, причем отсутствие сигнала готовности и/или отсутствие измеренных значений от соответствующего измерительного/управляющего устройства (12) указывают на прерывание (16), в результате чего затронутое прерыванием измерительное/управляющее устройство (12) становится изолированным.
9. Способ по п. 7 или 8, причем сигнал готовности от измерительного/управляющего устройства (12) передается с более высокой или той же частотой, что и частота передачи измеренных значений измерительных/управляющих устройств (12).
| DE 102008053193 A1, 29.04.2010 | |||
| US 2010125373 A1, 20.05.2010 | |||
| Регулятор напряжения для силовых трансформаторов | 1982 |
|
SU1140094A1 |

