Область техники, к которой относится изобретение
Настоящее раскрытие в целом относится к способам и системам для системы рециркуляции отработавших газов двигателя внутреннего сгорания.
Уровень техники/Раскрытие изобретения
Для снижения регламентируемых выбросов в атмосферу и улучшения топливной экономичности в системах двигателя могут применять рециркуляцию отработавших газов из системы вывода отработавших газов во впускную систему двигателя (впускной канал), и этот процесс называется РОГ (рециркуляция отработавших газов). Для измерения и/или управления РОГ, система РОГ, такая как система РОГ низкого давления, может включать в себя разнообразные датчики. В качестве одного примера, впускная система двигателя может включать в себя датчик содержания компонента впускного газа, например, датчик кислорода, который может использоваться в условиях без РОГ для определения содержания кислорода в свежем впускном воздухе. В условиях с РОГ, датчик можно использовать для логического вывода РОГ по изменению концентрации кислорода в результате добавления РОГ в качестве разбавителя. Один пример такого впускного датчика кислорода показан Matsubara и др. в US 6,742,379. Однако точность оценок РОГ по данным впускного датчика кислорода может снижаться в определенных условиях работы двигателя (например, когда двигатель работает с наддувом, или когда задействована продувка, и через впускную систему протекают углеводороды). Поток РОГ также можно оценить с использованием альтернативных датчиков РОГ. Например, в системе РОГ может также содержаться датчик ПД (перепада давления), расположенный между входом и выходом клапана РОГ, и предназначенный для оценивания потока РОГ по перепаду давления на клапане РОГ и проходному сечению клапана РОГ. Оценки потока EGR затем можно использовать для регулирования положения клапана РОГ, чтобы тем самым регулировать количество РОГ, подаваемое в двигатель. То есть, с помощью и датчика IAO2 и датчика ПД можно получить независимые оценки потока EGR. Однако авторы настоящего изобретения выяснили, что точности и датчика IAO2 и датчика ПД могут изменяться в зависимости от условий работы двигателя, тем самым меняя точность результирующих оценок потока РОГ. То есть, в определенных условиях датчик ПД может быть более точным, чем датчик IAO2 и наоборот. В одном примере, датчик ПД может быть точнее датчика IAO2 тогда, когда через впускную систему протекают газы продувки и/или газы ПВК (принудительной вентиляции картера).
В одном примере, раскрытые выше недостатки могут быть устранены способом регулирования работы двигателя по окончательной оценке параметра газового потока, причем окончательная оценка параметра газового потока определяется каждым из нижеперечисленного: первый параметр газового потока, оцененный с помощью первого датчика, второй параметр газового потока, оцененный с помощью датчика, расположенного на расстоянии от первого датчика в газовом канале двигателя, и величины точностей каждого из первого и второго параметров газового потока. Тем самыми окончательная оценка параметра газового потока может иметь повышенную точность, что улучшит управление двигателем.
В одном примере, окончательной оценкой параметра газового потока может быть окончательная оценка потока РОГ (рециркуляции отработавших газов). Например, двигатель может содержать канал РОГ, направляющий РОГ через клапан РОГ из выпускного канала двигателя во впускной канал двигателя. Контроллер двигателя может оценить первый поток РОГ по перепаду давления на клапане РОГ и проходному сечению клапана РОГ. Контроллер двигателя может также оценить второй поток РОГ по выходному сигналу датчика кислорода, расположенного во впускном канале ниже по потоку от канала РОГ. Кроме того, контроллер двигателя может присвоить первое значение точности первой оценке потока РОГ и второе значение точности второй оценке потока РОГ, исходя из условий работы двигателя в процессе оценивания. Например, первое значение точности может определяться одним или более из следующего: помпаж компрессора, положение перепускного клапана компрессора и выходной сигнал перепада давления с датчика перепада давления, а второе значение точности может определяться одним или более из следующего: статус впускного датчика кислорода, поток продувки и поток ПВК (принудительной вентиляции картера). Затем может быть определена окончательная оценка потока РОГ по первой оценке потока РОГ, второй оценке потока РОГ, первому значению точности и второму значению точности. Например, окончательная оценка потока может в большей степени определяться одной или первой или второй оценками потока РОГ, в зависимости от того, как соотносятся друг с другом значения первой и второй точностей. Это позволит определить более точную оценку потока РОГ. Затем по окончательной оценке потока РОГ контроллер может отрегулировать клапан РОГ, чтобы обеспечить требуемый поток РОГ.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут описаны подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
На фиг. 1 схематически изображен пример системы двигателя, включающей в себя впускной датчик кислорода и систему рециркуляции отработавших газов.
На фиг. 2А - фиг. 2В изображены блок-схемы способа для определения параметра газового потока для газов в газовом канале двигателе по выходным сигналам двух датчиков, расположенных в разных местах двигателя.
На фиг. 3 приведена блок-схема способа определения точностей выходных сигналов датчика перепада давления, используемых для оценивании пропорции РОГ во
На фиг. 4 приведена блок-схема способа определения точности выходных сигналов датчика кислорода, используемых для оценивания пропорции РОГ во впускном воздухе.
На фиг. 5 показана блок схема определения того, как использовать выходные сигналы датчика кислорода и датчика перепада давления для оценивания пропорции РОГ во впускном воздухе, исходя из точностей датчиков.
Осуществление изобретения
Нижеследующее раскрытие относится к системам и способам определения параметра газового потока в двигателе транспортного средства по оценкам параметра газового потока по выходным сигналам двух датчиков, расположенных в системе двигателя на расстоянии друг от друга. В одном примере, параметр газового потока может включать в себя долю РОГ (рециркуляции отработавших газов) во впускной системе двигателя с турбонаддувом. Двигатель с турбонаддувом, как показано на фиг. 1, может содержать впускной датчик кислорода, размещенный во впускном канале двигателя, и датчик ПД (перепада давления), размещенный в канале РОГ. Каждый из датчиков перепада давления и датчик впускного кислорода может использоваться для выдачи оценок потока РОГ, протекающего по системе РОГ низкого давления. Поток РОГ может регулироваться клапаном РОГ таким образом, что когда он будет открыт, отработавшие газы смогут рециркулироваться во впускной канал из точки ниже по потоку от турбины в точку выше по потоку от компрессора. Тем не менее, в зависимости от условий работы двигателя, точность датчиков ПД и кислорода может изменяться. Например, точность датчика кислорода может быть меньше точности датчика ПД, когда газы продувки и/или принудительной вентиляции картера будут течь через впускную систему. С другой стороны, датчик ПД может быть менее точным, чем датчик кислорода, когда активен помпаж компрессора, или открыт клапан ПКК (перепускной клапан компрессора). При этом точность оценок потока РОГ может быть повышена с помощью способа определения точности датчиков и включения в окончательную оценку потока РОГ измерений обоих датчиков. На фиг. 3 и фиг. 4 показаны способы определения точности оценок датчиков ПД и кислорода.
Как раскрыто на фиг. 2 - фиг. 4, точности каждого из датчиков могут быть определены по условиям работы двигателя. В частности, точности датчиков могут определяться присутствием во впускной системе газов продувки и/или ПВК на стороне выталкивания, перепадом давление на клапане РОГ, присутствием помпажа компрессора, положением клапана ПКК и т.п. На фиг. 2 продемонстрировано то, как можно получить окончательную оценку потока РОГ по точностям каждого из датчиков. Кроме того, на фиг. 5 раскрыт способ включения выходных сигналов датчика ПД и кислорода в оценку потока РОГ в зависимости от изменения точностей датчиков. С учетом выходных сигналов как датчика кислорода, так и датчика ПД, можно повысить точность оценки потока РОГ в широком диапазоне условий работы двигателя.
На фиг. 1 в качестве примера схематически изображена система 100 двигателя с турбонаддувом, включающая в себя многоцилиндровый двигатель 10 внутреннего сгорания с двумя турбонагнетателями 120 и 130, которые могут быть идентичными. В качестве одного неограничивающего примера, система 100 двигателя может входить в состав движительной системы пассажирского транспортного средства. Хотя здесь это и не отображено, без выхода за пределы настоящего изобретения могут быть использованы и другие конфигурации двигателя, например, двигатель с одним турбонагнетателем.
Система 100 двигателя по меньшей мере частично может управляться контроллером 12 и входным воздействием от оператора 190 транспортного средства через устройство 192 ввода. В данном примере, устройство 192 ввода включает в себя педаль акселератора и датчик 194 положения педали, вырабатывающий пропорциональный сигнал ПП (положения педали). Контроллер 12 может быть микрокомпьютером, содержащим: микропроцессорное устройство, порты ввода/вывода, электронную среду хранения исполняемых программ и калибровочных значений, (например, чип постоянного запоминающего устройства (ПЗУ), оперативное запоминающее устройство (ОЗУ), энергонезависимое запоминающее устройство (ЭЗУ) и шину данных. ПЗУ электронной среды хранения может быть запрограммировано машиночитаемыми данными, представляющими собой энергонезависимые инструкции, исполняемые микропроцессорным устройством для реализации описываемых ниже алгоритмов, а также других вариантов, которые предполагаются, но конкретно не перечисляются здесь. Контроллер 12 может быть выполнен с возможностью приема информации от некоторого количества датчиков 165 и отсылки управляющих сигналов на некоторое количество исполнительных устройств 175 (разнообразные примеры которых описываются здесь). Другие исполнительные устройства, например, некоторое количество дополнительных клапанов и дроссельных заслонок, могут быть связаны с различными точками системы 100 двигателя. Контроллер 12 может принимать входные данные от различных датчиков, обрабатывать входные данные и приводить в действие исполнительные механизмы по обработанным входным данным в соответствии с запрограммированными в нем инструкцией или кодом по одному или нескольким алгоритмам. Примеры алгоритмов управления раскрываются здесь со ссылкой на фиг. 2 - фиг. 4.
Система 100 двигателя может получать впускной воздух через впускной канал 140. Как показано на фиг. 1, впускной канал 140 может содержать воздушный фильтр 156 и дроссельную заслонку 115 воздухозаборной системы (ВЗС). Положение дроссельной заслонки 115 ВЗС может регулировать система управления посредством исполнительного устройства 117, с возможностью обмена информацией связанного с контроллером 12.
По меньшей мере часть впускного воздуха можно направлять к компрессору 122 турбонагнетателя 120 по первой ветви впускного канала 140, обозначенной 142, и по меньшей мере часть впускного воздуха можно направлять к компрессору 132 турбонагнетателя 130 по второй ветви впускного канала 140, обозначенной 144. То есть, система 100 двигателя содержит систему 191 ВЗС низкого давления (сокращенно обозначаемую ВЗС НД) выше по потоку от компрессоров 122 и 132, и систему 193 ВЗС высокого давления (сокращенно обозначаемую как ВЗС ВД) ниже по потоку от компрессоров 122 и 132.
Тракт (например, выталкивающая трубка) 198 системы ПВК принудительной вентиляции картера может связывать картер (не показан) со второй ветвью 144 впускного канала таким образом, чтобы газы из картера можно было управляемо вентилировать из картера. Кроме того, испарения из бачка поглощения паров топлива (не показан) могут вентилироваться во впускной канал через пароудалительный тракт 195, связывающий бачок поглощения паров топлива со второй ветвью 144 впускного канала.
Первая порция из всего объема впускного воздуха может быть сжата посредством компрессора 122, откуда ее можно подать по впускному воздушному каналу 146 во впускной коллектор 160. То есть, впускные каналы 142 и 146 формируют собой первую ветвь системы впуска воздуха в двигатель. Аналогичным образом, вторая порция из всего объема впускного воздуха может быть сжата компрессором 132, откуда ее по впускному воздушному каналу 148 можно подать во впускной коллектор 160. То есть, впускные каналы 144 и 148 формируют собой вторую ветвь системы впуска воздуха в двигатель. Как показано на фиг. 1, впускной воздух из впускных каналов 146 и 148 через общий впускной канал 149 может быть воссоединен перед тем, как он достигнет впускного коллектора 160, откуда его можно подавать в двигатель. В некоторых примерах, впускной коллектор 160 может содержать датчик 182 давления во впускном коллекторе для оценивания ДВК (давления в коллекторе) и/или датчик 183 температуры во впускном коллекторе для оценки ТВК (температуры в коллекторе), причем каждый из указанных датчиков может обмениваться информацией с контроллером 12. В иллюстрируемом примере, впускной канал 149 также содержит ОВН (охладитель воздуха наддува) 154 и дроссельную заслонку 158. Положение дроссельной заслонки 158 может регулировать система управления посредством исполнительного устройства 157 дроссельной заслонки, с возможностью обмена информацией связанного с контроллером 12. Как показано, дроссельная заслонка 158 во впускном канале 149 может располагаться ниже по потоку от ОВН 154 и может быть выполнена с возможностью регулирования расхода потока впускного газа, поступающего в двигатель 10.
Как показано на фиг. 1, в канале 150 ПКК (перепускного клапана компрессора) может быть установлен перепускной клапан 152 ПКК компрессора, а ПКК 155 может быть установлен в канале ПКК 151. В одном примере, клапаны ПКК 152 и ПКК 155 могут быть ЭППКК (электронными пневматическими перепускными клапанами компрессора). Управление клапанами ПКК 152 и 155 может вестись для того, чтобы создавать условия стравливания давления во впускной системе при работе двигателя под наддувом. Находящийся выше по потоку конец канала 150 ПКК может быть связан с впускным каналом 148 ниже по потоку от компрессора 132, а находящийся ниже по потоку конец канала ПКК 150 может быть связан с впускным каналом 144 выше по потоку от компрессора 132. Аналогичным образом, находящийся выше по потоку конец канала ПКК 151 может быть связан с впускным каналом 146 ниже по потоку от компрессора 122, а находящийся ниже по потоку конец канала ПКК 151 может быть связан с впускным каналом 142 выше по потоку от компрессора 122. В зависимости от положения каждого из ПКК, сжатый соответствующим компрессором воздух может быть рециркулирован во впускной канал выше по потоку от компрессора (например, во вторую ветвь 144 впускного канала для компрессора 132 и в первую ветвь 142 впускного канала для компрессора 122). Например, ПКК 152 может открываться для рециркулирования сжатого воздуха в место выше по потоку от компрессора 132 и/или ПКК 155 может открываться для рециркулирования сжатого воздуха в место выше по потоку от компрессора 122 для стравливания давления во впускной системе в выборочных условиях с целью снижения эффектов помпажа компрессора. Клапаны ПКК 155 и ПКК 152 могут управляться системой управления либо в активном, либо в пассивном режимах.
Как показано, во впускном канале 142 имеется ДВХК (датчик давления на входе компрессора) 196, а во впускном канале 149 имеется датчик 169 давления в ВСЗ ВД (воздухозаборной системе высокого давления). Однако, в других предполагаемых вариантах осуществления, датчики 196 и 169 могут быть установлены в других местах систем ВЗС НД и ВЗС ВД соответственно. Кроме других функций, датчик ДВХК 196 может использоваться для определения давления ниже по потоку от клапана 121 РОГ.
Двигатель 10 может содержать некоторое количество цилиндров 14. В иллюстрируемом примере, двигатель 10 содержит шесть цилиндров, расположенных в V-образной конфигурации. В частности, шесть цилиндров расположены в два ряда 13 и 15, причем каждый ряд включает в себя три цилиндра. В альтернативных примерах, двигатель 10 может содержать два или более цилиндров, например, 3, 4, 5, 8, 10 или более цилиндров. Эти разнообразные цилиндры могут быть разделены поровну и расположены в различных конфигурациях, таких как V-образная, рядная, прямоугольная и т.п. Каждый цилиндр 14 может быть выполнен с топливной форсункой 166. В иллюстрируемом примере, топливная форсунка 166 является форсункой прямого впрыска в цилиндр. Тем не менее, в других примерах, топливная форсунка 166 может быть выполнена в виде форсунки впрыска во впускные каналы.
Подаваемый по общему впускному каналу 149 к каждому цилиндру 14 (также называемому камерой 14 сгорания) впускной воздух может быть использован для сжигания топлива, а продукты горения затем могут быть выведены через выпускные каналы, особые для каждого ряда цилиндров. В иллюстрируемом примере, первый ряд 13 цилиндров двигателя 10 может выводить продукты горения через общий выпускной канал 17, а второй ряд 15 цилиндров может выводить продукты горения через общий выпускной канал 19.
Положение впускных и выпускных клапанов каждого цилиндра 14 может изменяться посредством толкателей с гидравлическим приводом, связанных со штангами клапанов, или посредством механических поршней, в которых используются кулачки с рабочими выступами. В рассматриваемом примере, по меньшей мере впускные клапаны каждого из цилиндров 14 могут управляться кулачками с использованием системы кулачкового привода. В частности, система 25 кулачкового привода впускного клапана может включать в себя один или более кулачков, и может использовать переменные временные установки или высоту подъема клапана для впускных и/или выпускных клапанов. В альтернативных осуществлениях, впускные клапаны могут управляться электрической системой привода клапанов. Аналогичным образом, выпускные клапаны могут иметь гидравлический или электрический привод. В другом возможном альтернативном осуществлении, кулачки могут быть нерегулируемыми.
Продукты горения, выбрасываемые двигателем 10 по выпускному каналу 17, могут быть направлены через выпускную турбину 124 турбонагнетателя 120, который, в свою очередь, посредством вала 126 может сообщать механическую работу компрессору 122 для того, чтобы сжимать впускной воздух. Альтернативно, протекающие через выпускной канал 17 отработавшие газы целиком или полностью могут быть пущены в обход выпускной турбины 124 через перепускной канал 123 турбины, причем этим процессом управляет регулятор 128 давления наддува. Положение (заслонки) регулятора 128 давления наддува может изменяться исполнительным устройством (не показано) под управлением контроллера 12. В качестве одного неограничивающего примера - контроллер 12 может изменять положение (заслонки) регулятора 128 давления наддува посредством пневматического исполнительного устройства, управляемого соленоидным клапаном. Например, соленоидный клапан может получать сигнал на задействование регулятора 128 давления наддува посредством пневматического исполнительного устройства, причем сигнал будет вырабатываться по разности давлений воздуха между впускным каналом 142, расположенным выше по потоку от компрессора 122, и впускным каналом 149, расположенным ниже по потоку от компрессора 122. В других примерах, для приведения в действие регулятора 128 давления наддува могут использовать другие подходы, а не соленоидный клапан.
Аналогичным образом, продукты горения, выбрасываемые двигателем 10 по выпускному каналу 19, могут быть направлены через выпускную турбину 134 турбонагнетателя 130, который, в свою очередь, посредством вала 136 может сообщать механическую работу компрессору 132 для того, чтобы сжимать впускной воздух, протекающий по второй ветви системы впуска двигателя. Альтернативно, протекающие через выпускной канал 19 отработавшие газы целиком или полностью могут быть пущены в обход выпускной турбины 134 через перепускной канал 133 турбины, причем этим процессом управляет регулятор 138 давления наддува. Положение (заслонки) регулятора 138 давления наддува может изменяться исполнительным устройством (не показано) под управлением контроллера 12. В качестве одного неограничивающего примера - контроллер 12 может изменять положение (заслонки) регулятора 138 давления наддува посредством пневматического исполнительного устройства, управляемого соленоидным клапаном. Например, соленоидный клапан может получать сигнал на задействование регулятора 138 давления наддува посредством пневматического исполнительного устройства, причем сигнал будет вырабатываться по разности давлений воздуха между впускным каналом 144, расположенным выше по потоку от компрессора 132, и впускным каналом 149, расположенным ниже по потоку от компрессора 132. В других примерах, для приведения в действие регулятора 138 давления наддува могут использовать другие подходы, а не соленоидный клапан.
В некоторых примерах, выпускные турбины 124 и 134 могут быть выполнены в виде турбин с изменяемой геометрией, причем контроллер 12 может регулировать положение лопастей (или лопаток) рабочего колеса турбины с целью изменения уровня энергии, получаемой из потока отработавших газов и передаваемой соответствующему компрессору. Альтернативно, выпускные турбины 124 и 134 могут быть выполнены в виде турбин с регулируемым соплом, причем контроллер 12 может регулировать положение сопла турбины с целью изменения уровня энергии, получаемой из потока отработавших газов и передаваемой соответствующему компрессору. Например, система управления может быть выполнена с возможностью независимого изменения положения лопаток или сопла выпускных турбин 124 и 134 через соответствующие исполнительные устройства.
Продукты горения, выбрасываемые цилиндрами через выпускной канал 19, могут направляться в атмосферу через выпускной канал 180 ниже по потоку от выпускной турбины 134, в то время как продукты горения, выбрасываемые через выпускной канал 17, могут направляться в атмосферу через выпускной канал 170 ниже по потоку от турбины 124. Выпускные каналы 170 и 180 могут содержать одно или несколько устройств доочистки выхлопа, таких как каталитический нейтрализатор, а также один или более датчиков отработавших газов. Например, как показано на фиг. 1, выпускной канал 170 может включать в себя устройство 129 снижения токсичности выбросов, установленное ниже по потоку от выпускной турбины 124, а выпускной канал 180 может содержать устройство 127 снижения токсичности выбросов, установленное ниже по потоку от выпускной турбины 134. Устройства 127 и 129 снижения токсичности выбросов могут быть устройствами СКВ (селективного каталитического восстановления), ТКН (трехкомпонентными каталитическими нейтрализаторами), улавливателями NOx, другими разнообразными устройствами снижения токсичности выбросов или сочетаниями вышеперечисленных устройств. Кроме того, в некоторых вариантах осуществления, в процессе работы двигателя 10, устройства 127 и 129 снижения токсичности выбросов могут регенерировать путем, например, эксплуатации по меньшей мере одного цилиндра двигателя с особым воздушно-топливным отношением.
Система 100 двигателя также может содержать одну или несколько систем РОГ (рециркуляции отработавших газов) для рециркулирования по меньшей мере части отработавших газов из выпускного коллектора во впускной коллектор. Эти системы могут включать в себя одну или несколько систем РОГ высокого давления для обеспечения РОГ высокого давления (РОГ ВД) и один или несколько контуров РОГ низкого давления для обеспечения РОГ низкого давления (РОГ НД). В одном примере, РОГ ВД может быть обеспечена в отсутствие наддува от турбонагнетателей 120, 130, в то время как РОГ НД может быть обеспечена в присутствии турбонагнетательного наддува и/или когда температура отработавших газов превышает свое пороговое значение. В других примерах возможно обеспечение и РОГ ВД и РОГ НД одновременно.
В иллюстрируемом примере, система 100 двигателя может включать в себя систему 108 РОГ низкого давления (НД). Система 108 РОГ НД направляет требуемую часть отработавших газов из выпускного канала 170 во впускной канал 142. В иллюстрируемом осуществлении, РОГ направляют через канал 197 РОГ из места ниже по потоку от выпускной турбины 124 во впускной канал 142 в точку смешивания, расположенную выше по потоку от компрессора 122. Объем РОГ, обеспечиваемый впускному каналу 142, может варьироваться контроллером 12 посредством клапана 121 РОГ, связанного с системой 108 РОГ НД. В примере осуществления, показанном на фиг. 1, система 108 РОГ НД включает в себя охладитель 113 РОГ, расположенный выше по потоку от клапана 121 РОГ. Охладитель 113 РОГ может отводить тепло от рециркулируемых отработавших газов, например, к хладагенту двигателя. Система РОГ НД также может включать в себя систему ПДНК (перепада давления на клапане или ПД (перепада давления)). В одном примере, можно оценивать расход РОГ по системе ПДНК, включающей в себя датчик 125 ПД, регистрирующий перепад давления между находящейся выше по потоку частью клапана 121 РОГ и находящейся ниже по потоку частью клапана 121 РОГ. Расход РОГ (например, расход РОГ НД), определенный системой ПДНК, может также определяться температурой РОГ, зарегистрированной датчиком 135 температуры, расположенным ниже по потоку от клапана 121 РОГ, и по площади открытия клапана РОГ, зарегистрированной датчиком 131 подъема клапана РОГ. В других примерах, расход РОГ могут оценивать по перепаду давления на постоянном мерном отверстии. В других возможных примерах расход EGR могут оценивать по перепаду давления на изменяемом (например, ступенчато) мерном отверстии. В другом примере, расход РОГ могут оценивать по выходным сигналам измерительной системы РОГ, включающей в себя впускной датчик 168 (здесь называемым IAO2), кислорода, датчик массового расхода воздуха (не показан), датчик 182 ДВК абсолютного давления в коллекторе и датчик 183 температуры в коллекторе. В некоторых примерах, для нахождения, контролирования и регулирования расхода РОГ могут использоваться обе измерительные системы РОГ (то есть, система ПДНК и измерительная система РОГ, включающая в себя впускной датчик 168 кислорода).
В альтернативном варианте осуществления изобретения, система двигателя может включать в себя вторую систему РОГ НД (не показана), направляющую требуемую часть отработавших газов из выпускного канала 180 во впускной канал 144. В другом альтернативном осуществлении, система двигателя может включать в себя обе описанные выше системы РОГ НД (одна из которых направляет отработавшие газы из выпускного канала 180 во впускной канал 144, а вторая из которых направляет отработавшие газы из выпускного канала 170 во впускной канал 142).
Еще в одном варианте осуществления, хотя он и не показан на фиг. 1, система 100 двигателя может также включать в себя систему РОГ высокого давления, которая может направлять нужную часть отработавших газов из общего выпускного канала 17, выше по потоку от турбины 124, во впускной коллектор 160, ниже по потоку от впуской дроссельной заслонки 158.
Клапан 121 РОГ может содержать корпус и шток (не показаны), причем указанный шток имеет возможность так двигаться внутри корпуса клапана 121 EGR, чтобы можно было регулировать степень открытия клапана 121 EGR в зависимости от взаимного расположения штока и корпуса. Клапан 121 РОГ может быть выполнен с возможностью регулирования объема и/или расхода отработавших газов, отводимых через канал РОГ для достижения требуемого процентного разбавления РОГ впускного заряда, поступающего в двигатель, причем впускной заряд с большим процентным разбавлением РОГ имеет большее отношение рециркулированных отработавших газов к воздуху, чем впускной заряд с меньшим процентным разбавлением РОГ. Кроме положения клапана 121 РОГ, следует понимать, что на процентное разбавление РОГ впускного заряда могут влиять и положение дроссельной заслонки 115 ВЗС и положения других исполнительных устройств. Например, положение дроссельной заслонки ВЗС может увеличивать перепад давления на системе РОГ НД, позволяя большему потоку РОГ НД поступать в систему впуска. В результате, это может повысить процентное разбавление РОГ, при том, что меньший поток РОГ НД во впускную систему может уменьшить процентное разбавление РОГ (например, процентное содержание РОГ). Соответственно, разбавление РОГ впускного заряда может регулироваться посредством управления одним или более из следующего: положение клапана РОГ и положение дроссельной заслонки ВЗС, а также прочими параметрами. То есть, регулирование одного или более из следующего: клапан 121 РОГ и дроссельная заслонка 115 ВЗС, может регулировать объем (или расход) потока РОГ и, следовательно, процентное содержание РОГ в массовом потоке воздуха (например, воздушном заряде, поступающем во впускной коллектор).
Двигатель 10 может также содержать один или несколько датчиков кислорода, расположенных в общем впускном канале 149. То есть, один или более датчиков кислорода могут называться впускными датчиками кислорода. В иллюстрируемом осуществлении впускной датчик 168 кислорода расположен выше по потоку от дроссельной заслонки 158 и ниже по потоку от ОВН 154. Тем не менее, в других вариантах осуществления, впускной датчик 168 кислорода может быть расположен в другом месте вдоль по длине впускного канала 149, например, выше по потоку от ОВН 154. Впускной датчик (IAO2) 168 кислорода может быть датчиком кислорода с переменного напряжения (ПН), или другим датчиком, пригодным для обеспечения информации о концентрации кислорода и концентрации РОГ в воздухе впускного заряда (например, воздухе, протекающем по общему впускному каналу 149). В одном примере, впускной датчик 168 кислорода может быть впускным датчиком кислорода, с использованием в качестве измерительного элемента подогреваемого элемента. В процессе работы, ток накачки впускного датчика кислорода может нести в себе информацию о количестве кислорода, содержащегося в потоке газа.
Рядом с датчиком 168 IAO2 кислорода может быть расположен датчик 172 давления, предназначенный для оценки давления на впуске, при котором получают выходной сигнал датчика кислорода. Так как на выходной сигнал датчика кислорода влияет давление на впуске, при эталонном давлении на впуске можно получить эталонный выходной сигнал датчика кислорода. В одном примере, эталонным давлением на впуске является ДВХДС (давление на входе дроссельной заслонки), когда датчиком ДВХДС является датчик 172 давления. В альтернативных примерах, эталонным давлением на впуске может быть ДВК (давление в коллекторе), измеряемое датчиком 182 ДВК.
В дополнение к тем датчикам, которые были указаны выше, система 100 двигателя может содержать разнообразные датчики 165. На фиг. 1 показано, что общий впускной канал 149 может содержать датчик 173 ТВХДС (температуры на входе дроссельной заслонки) для оценки температуры ТСТ воздуха на дроссельной заслонке. Кроме того, хотя это и не отображено здесь, каждый из впускных каналов 142 и 144 может содержать датчик массового расхода воздуха, или же датчик массового расхода воздуха может быть расположен в общем впускном канале 140.
В состав только одного из параллельных впускных каналов может быть включен датчик 189 влажности. На фиг. 1 показано, что датчик 189 влажности расположен во впускном канале 142 (например, в той ветви впускного канала, в которой не проходит поток ПВК и продувочный поток), выше по потоку от ОВН 154 и выхода канала 197 РОГ НД во впускной канал 142 (то есть в соединении между каналом 197 РОГ НД и впускным каналом 142, где РОГ НД поступает во впускной канал 142). Датчик 189 влажности может быть выполнен с возможностью оценивания относительной влажности впускного воздуха. В одном варианте осуществления, датчик 189 влажности является датчиком УДКОГ, выполненным с возможностью оценивания влажности впускного воздуха по выходному сигналу датчика при одном или нескольких значениях напряжения. Так как продувочный воздух и воздух ПВК могут искажать показания датчика влажности, продувочное окно и окно ПВК располагают не в том впускном канале, в котором расположен датчик влажности.
Впускной датчик 168 кислорода может использоваться для оценивания концентрации впускного кислорода и логического вывода количества протекающего через двигатель потока РОГ из изменения впускной концентрации кислорода при открытии клапана 121 РОГ. В частности, изменение выходного сигнала датчика при открытии клапана 121 РОГ сравнивают с эталонной точкой, в которой датчик работает без РОГ (нулевая точка). По изменению (например, уменьшению) количества кислорода с момента работы без РОГ, можно рассчитать поток РОГ, в настоящее время подаваемый в двигатель. Например, при подаче на датчик эталонного напряжения (Vs), датчик выдает ток (lp) накачки. Изменение концентрации кислорода может быть пропорциональным изменению (delta lp) тока накачки, выдаваемого датчиком в присутствии РОГ по сравнению с выходным сигналом датчика в отсутствии РОГ (нулевая точка). По отклонению оценочного потока РОГ от ожидаемого (или целевого) потока РОГ можно осуществлять управление РОГ.
Оценку нулевой точки впускного датчика 168 кислорода можно выполнять во время существования условий холостого хода, при которых минимальны колебания впускного давления, а в воздухозаборную систему низкого давления не подается воздуха ПВК или продувочного воздуха. Кроме того, адаптацию на холостом ходу можно выполнять периодически, например, при первых возникающих после запуска двигателя условиях холостого хода, с целью компенсации влияния на выходной сигнал датчика эффектов старения датчика и нестабильности показаний датчиков.
Альтернативно, оценку нулевой точки впускного датчика кислорода можно выполнять в условиях, когда в двигатель не подается топливо, например, при ОТРЗ (отсечки топлива в режиме замедления). Выполняя адаптацию в условиях ОТРЗ, в добавок к снижению факторов шума, те, что были достигнуты при адаптации на холостом ходу, можно уменьшить вариации показаний датчика из-за протечек через клапан РОГ.
На фиг. 2А - фиг. 2В показана блок-схема способа 200, который можно использовать для оценивания параметра (например, рабочего параметра) газового потока в системе двигателя (например, в системе 100 двигателя) по отдельным оценкам параметров газового потока, полученным по выходным сигналам двух датчиков, расположенных в разных местах системы двигателя. Тем самым, способ 200 можно использовать для комбинирования сигналов, полученных из выполненных в потоке измерений или расчетов, и разделенных во времени и пространстве. В частности, комбинирование выходных сигналов от двух датчиков может включать в себя учет аксиальной диффузии газа между местоположениями датчиков и точности каждого из датчиков. Тем не менее, в раскрытии способа 200 на фиг. 2А - 2В настоящего документа показано примерное применение способа 200. В этом примере, способ 200 применяется к системе РОГ низкого давления для оценивания потока РОГ по условиям работы двигателя с применением впускной датчика кислорода (такого как датчик 168 IAO2, показанный на фиг. 1) и/или датчика ПД (например, датчика 125 ПД, показанного на фиг. 1), системы ПДНК. Инструкции для выполнения способа 200 могут храниться в памяти контроллера двигателя, такого как контроллер 12, показанный на фиг. 1. Кроме того, способ 200 может выполняться контроллером. Контроллер может оценивать массовый расход РОГ, используя датчик ПД, измеряющий перепад давления на клапане РОГ, и датчик положения клапана (например, датчик 131 подъема клапана РОГ), что будет описано подробно ниже со ссылкой на фиг. 3. Кроме того, контроллер может оценивать долю газа РОГ во впускном воздухе по показаниям датчика кислорода (например, впускного датчика 168 кислорода), расположенного ниже по потоку от датчика ПД, что будет подробно описано далее по тексту со ссылкой на фиг. 4. Так как в различных условиях работы двигателя (например, когда через впускную систему протекают газы ПВК и/или газы продувки, в условиях помпажа компрессора, при открытии клапана ПКК) в сигналах датчика кислорода и датчика ПД может наблюдаться значительная ошибка и точности датчиков могут изменяться в зависимости от условий работы двигателя. Поэтому, способ 200 дополнительно включает в себя определение того, когда использовать сигналы от каждого из датчиков для оценивания потока EGR. Способ 200 также включает в себя определение точности сигналов датчика. Используя в зависимости от точности сигналов каждого датчика сигналы датчиков ПД и IAO2 совместно, можно получить окончательную, комбинированную оценку потока РОГ. Другими словами, точность сигнала (например, выходного сигнала) датчика может определять то, насколько сигнал этого датчика будет влиять на окончательную оценку потока РОГ.
В других осуществлениях способ 200 можно использовать для выработки окончательной оценки параметра газового потока для газов, не являющихся газами РОГ (например, газов ПВК, продувочных газов, отработавших газов и т.п.) по выходным сигналам двух датчиков, расположенных в разных местах системы 100 двигателя. Например, параметром газового потока может быть доля газов ПВК, продувочных газов или отработавших газов в газовом потоке двигателя. Параметром газового потока альтернативно или дополнительно может быть температура газового потока, измеренная в двух разных местах системы двигателя. При этом способ 200 можно использовать для комбинирования сигналов от датчиков, не являющихся впускным датчиком кислорода и датчиком перепада давления на клапане РОГ. Тем не менее, способ 200 также может включать в себя оценивание точности двух используемых для измерения выбранного параметра газового потока (например, количество проходящего через двигатель определенного газового потока) датчиков по условиям работы двигателя и выработку окончательной оценки газового потока, включающей в себя оценки газового потока от обоих датчиков.
Способ 200 начинается на этапе 202 и контроллер (например, контроллер 12) по данным обратной связи от датчиков оценивает и/или измеряет условия работы двигателя. К условиям работы двигателя могут относиться частота вращения двигателя и нагрузка двигателя, массовый расход впускного воздуха, давление в коллекторе, положение клапана ПКК, положение клапана ПВК, положение продувочного клапана и т.п. Способ 200 может перейти на этап 204 и контроллер может оценить первую долю РОГ по показаниям датчика ПД, и определить точность и допуски оценки РОГ по ПД, что будет подробнее разъяснено далее по тексту со ссылкой на фиг. 3. Допуски могут быть диапазоном значений доли РОГ, по центру которого находится оценка доли РОГ. В качестве одного примера точность может быть целочисленным значением между 0 и 3. В альтернативных вариантах осуществления, значение точности может включать в себя дополнительные целочисленные значения (например, 0, 1, 2, 3, 4 и т.п.). В других возможных вариантах осуществления, точность может быть другим численным значением (например, долей или нецелочисленным значением), представляющим собой относительную точность доли РОГ, оцененной по показаниям датчика ПД. Другими словами, точность может быть любым численным значением на непрерывной числовой оси. Затем, на этапе 206 контроллер может оценить вторую долю РОГ по показаниям датчика кислорода (например, впускного датчика кислорода) и определить базовую первую точность выходных сигналов датчика кислорода. Далее, на этапе 206 контроллер может оценить наличие во впускной системе газов ПВК и продувочных газов, что подробнее будет раскрыто в способе, показанном на фиг. 4. В других примерах, способы этапов 204 и 206 могут выполняться контроллером одновременно. В других примерах, контроллер может выполнять способ этапа 206 до выполнения этапа 204.
После получения сигналов от датчиков ПД и кислорода контроллер может продолжить выполнение на этапе 208 и может применить пространственную задержку по положению датчика кислорода для всех сигналов ПД, ПВК и продувки. Конкретнее, контроллер может применить первый поправочный коэффициент к оценке доли РОГ по показаниям датчика ПД вместе с оценками допусков и точности ПД. Первый поправочный коэффициент может быть применен к сигналам от датчика ПД для учета времени, которое требуется газам РОГ для того, чтобы пройти от местоположения системы ПДНК до находящегося ниже по потоку датчика кислорода. Измерения, одновременно произведенные датчиком кислорода и датчиком ПД, могут представлять различные газы РОГ, так как датчик кислорода находится на некотором расстоянии вниз по потоку от датчика ПД. То есть, из-за того, что проходящим через систему ПДНК газам РОГ требуется некоторое время для достижения находящегося ниже по потоку датчика кислорода, соответствующие выходные сигналы от датчика кислорода (например, выходные сигналы, представляющие один и тот же состав газа РОГ) можно задержать относительно выходных сигналов от датчика ПД. Для того, чтобы совместить по времени сигналы ПД (например, допуски ПД, точность ПД, оценку доли РОГ) с сигналами датчика кислорода так, чтобы обоими датчиками регистрировались одни и те же или относительно одни и те же газы, может быть использован поправочный коэффициент. Другими словами, поправочный коэффициент регулирует измерения ПД для того, чтобы они представляли тот поток РОГ, который в текущий момент времени измеряется датчиком кислорода. Первый поправочный коэффициент может быть одинаковым для допусков ПД, точности ПД и оценки доли РОГ по показаниям датчика ПД, так как все эти параметры брались из местоположения датчика ПД. Кроме того, первый поправочный коэффициент может определяться полным объемным расходом газа во впускной системе. Контроллер может рассчитать поправочный коэффициент по известному взаимоотношению между полным объемным расходом и объемом впускной системы, (например, трубок, труб, компрессора, ОВН) между датчиком ПД и датчиком кислорода, который может храниться в памяти контроллера. Аналогичным образом, к уровням ПВК и продувки могут быть применены второй и третий поправочные коэффициенты. Второй поправочный коэффициент может быть рассчитан по известному взаимоотношению между полным объемным расходом во впускной системе и объемом между входом ПВК (например, трактом 198 ПВК) и датчиком кислорода. Третий поправочный коэффициент может быть рассчитан по известному взаимоотношению между полным объемным расходом во впускной системе и объемом между входом продувки (например, трактом 195 продувки топливных паров) и датчиком кислорода. Так как вход ПВК и вход продувки расположены отдельно друг от друга и от датчика ПД, каждый из них от датчика кислорода может быть отделен разным объемом. То есть, выходные сигналы ПД, выходные сигналы ПВК и продувки все могут иметь различные поправочные коэффициенты.
После применения поправочных коэффициентов к сигналам ПД, продувки и ПВК, контроллер может перейти на этап 210 для применения фильтра к сигналам оценки допусков ПД и оценки доли РОГ от датчика ПД, который представляет аксиальную диффузию газовых смесей, проходящих от входной трубы РОГ до датчика кислорода. То есть, контроллер может непрерывно обрабатывать цифровые сигналы, относящиеся к оценке доли РОГ и допускам ПД. В одном примере фильтр может быть фильтром скользящего среднего первого порядка. Например, первичным фильтром может быть низкочастотный фильтр, предназначенный для уменьшения влияния частот ответного сигнала свыше пороговой частоты на общий сигнал допусков ПД и оценки доли РОГ. В одном примере, постоянная времени фильтра может быть предустановлена и храниться в памяти контроллера. В другом примере, постоянная времени фильтра может изменяться в зависимости от условий работы двигателя (например, в зависимости от того, открыт или закрыт клапан ПКК (например, ПКК 152 и ПКК 155), от полного объемного расхода газов во впускной системе и т.п.
Контроллер затем может перейти на этап 212 для того, чтобы определить, не уменьшается ли точность датчика ПД. Если точность датчика ПД повышается, то контроллер может перейти на этап 216 и отрегулировать выходной сигнал первого фильтра этапа 210 по первому пороговому значению. В частности, контроллер может регулировать точность датчика ПД так, чтобы регулируемая точность могла бы повышаться только тогда, когда неотрегулированный выходной сигнал частоты до этапа 216 поднимался бы выше первого порогового значения. То есть, контроллер может увеличивать относительно текущего присвоенного значения присвоенное датчику ПД значение частоты только тогда, когда точность поднимается выше первого порогового значения. Для гарантии того, что оценка точности датчика ПД не будет завышена, первое пороговое значение может находиться ближе к следующему наивысшему значению точности относительно текущего значения точности, чем текущее значение точности. В одном примере, на этапе 216 контроллер может отрегулировать выходной сигнал первого фильтра с этапа 210 с использованием компаратора. В частности, контроллер может применить к выходному сигналу фильтра с этапа 210 компаратор, использующий пороговое значение, близкое к следующему более высокому целочисленному значению, чтобы выходной сигнал компаратора изменял целочисленное состояние после того, как фильтрованный выходной сигнал с этапа 210 окажется в пределах малого калибруемого значения (фиксированного или процентного) следующего более высокого целочисленного значения. Как будет разъяснено подробнее по фиг. 3, точности датчика ПД может быть присвоено целочисленное значение от 0 до 3. Компаратор этапа 216, примененный к фильтрованному сигналу точности ПД с этапа 210, когда она повышается, использует пороговое значение ближе к следующему более высокому целочисленному значению для гарантирования того, чтобы точность датчика ПД не повышалась до следующего целочисленного значения (состояния), пока  часть газа в объеме аксиальной диффузии не достигнет датчика кислорода. И наоборот, если контроллер на этапе 212 определит, что точность ПД уменьшается, он может перейти на этап 216 для регулирования точности ПД по более низкому второму пороговому значению. То есть, контроллер может уменьшить присвоенное датчику ПД значение точности относительно текущего присвоенного значения, когда точность понизится ниже второго порогового значения. Второе пороговое значение может быть ближе к текущему значению точности, чем наиближайшее меньшее значение точности к текущему значению точности, чтобы гарантировать то, чтобы не была завышена оценка точности датчика ПД. В одном примере, контроллер может применить к выходному сигналу фильтра с этапа 210 компаратор, использующий пороговое значение, далекое от следующего более низкого целочисленного значения, чтобы выходной сигнал компаратора изменял целочисленное состояние после того, как фильтрованный выходной сигнал с этапа 210 окажется в пределах большого калибруемого значения (фиксированного или процентного) следующего более низкого целочисленного значения. Другими словами, пороговое значение компаратора будет близким к текущему целочисленному значению, так что компаратор изменяет целочисленное состояние после того как фильтрованный выходной сигнал с этапа 210 окажется в пределах малого калибруемого значения (фиксированного или процентного) текущего целочисленного значения. То есть, значение точности, присвоенное датчику ПД, может быть уменьшено при уменьшении сигнала точности датчика. При этом в некоторых примерах, применение далекого от текущего целочисленного значения порогового значения компаратора к фильтрованному сигналу точности ПД с этапа 210 только при повышении точности задержит время, в которое сигнал точности ПД повысит целочисленное значение до момента, пока не будет вероятно то, что объем аксиальной диффузии не будет пройден датчиком кислорода, и может ограничить завышение оценки точности датчика ПД. И наоборот, применение близкого к текущему целочисленному значению порогового значения компаратора к фильтрованному сигналу точности ПД с этапа 210 при снижении точности не задержит время, когда сигнал точности ПД уменьшит целочисленное значение, тем самым уменьшив значение, когда начало объема аксиальной диффузии достигнет датчика кислорода, и опять же ограничит завышение оценки точности датчика ПД.
часть газа в объеме аксиальной диффузии не достигнет датчика кислорода. И наоборот, если контроллер на этапе 212 определит, что точность ПД уменьшается, он может перейти на этап 216 для регулирования точности ПД по более низкому второму пороговому значению. То есть, контроллер может уменьшить присвоенное датчику ПД значение точности относительно текущего присвоенного значения, когда точность понизится ниже второго порогового значения. Второе пороговое значение может быть ближе к текущему значению точности, чем наиближайшее меньшее значение точности к текущему значению точности, чтобы гарантировать то, чтобы не была завышена оценка точности датчика ПД. В одном примере, контроллер может применить к выходному сигналу фильтра с этапа 210 компаратор, использующий пороговое значение, далекое от следующего более низкого целочисленного значения, чтобы выходной сигнал компаратора изменял целочисленное состояние после того, как фильтрованный выходной сигнал с этапа 210 окажется в пределах большого калибруемого значения (фиксированного или процентного) следующего более низкого целочисленного значения. Другими словами, пороговое значение компаратора будет близким к текущему целочисленному значению, так что компаратор изменяет целочисленное состояние после того как фильтрованный выходной сигнал с этапа 210 окажется в пределах малого калибруемого значения (фиксированного или процентного) текущего целочисленного значения. То есть, значение точности, присвоенное датчику ПД, может быть уменьшено при уменьшении сигнала точности датчика. При этом в некоторых примерах, применение далекого от текущего целочисленного значения порогового значения компаратора к фильтрованному сигналу точности ПД с этапа 210 только при повышении точности задержит время, в которое сигнал точности ПД повысит целочисленное значение до момента, пока не будет вероятно то, что объем аксиальной диффузии не будет пройден датчиком кислорода, и может ограничить завышение оценки точности датчика ПД. И наоборот, применение близкого к текущему целочисленному значению порогового значения компаратора к фильтрованному сигналу точности ПД с этапа 210 при снижении точности не задержит время, когда сигнал точности ПД уменьшит целочисленное значение, тем самым уменьшив значение, когда начало объема аксиальной диффузии достигнет датчика кислорода, и опять же ограничит завышение оценки точности датчика ПД.
В другом осуществлении, контроллер может применить компаратор с порогами вблизи и вдали от текущего целочисленного значения точности для условий увеличения и уменьшения целочисленного значения соответственно, для неприменения фильтра на этапе 210 для случаев, когда целочисленное значение точности уменьшается, и для использования далекого от текущего целочисленного значения точности порогового значения компаратора, чтобы выходной сигнал компаратора изменял состояние на следующее наинизшее целочисленное значение сразу же после изменения целочисленного значения точности, подаваемого в компаратор на этапе 212.
Тем самым, после того, как контроллер применит пространственную задержку на этапе 208, фильтр на этапе 210 и компаратор на этапе 216, сигналы оценки доли РОГ по показаниям датчика ПД, точности датчика ПД, допусков датчика ПД, потока ПВК и продувочного потока могут быть все совмещены по времени с сигналами от датчика кислорода, так что все сигналы могут представлять те газы, которые в настоящий момент времени измеряются на датчике кислорода.
Затем с этапа 216 или этапа 214 контроллер может перейти на этап 218, чтобы определить, равняется ли 1 точность датчика ПД. Как будет описано более подробно ниже со ссылкой на фиг. 3, точности датчика ПД может быть присвоено значение 1 тогда, когда или активен помпаж компрессора, или открыт клапан ПКК, или когда выполняются оба этих условия. Если присвоенная датчику ПД точность равняется 1 после пространственной задержки на этапе 208, потенциальной фильтрации на этапе 216, и регулировок на этапе 216, то способ 200 может продолжиться этапом 222, на котором сигнал доли РОГ по показаниям датчика ПД пропускают через второй фильтр, с меньшей чем у первого фильтра частотой среза, на калибруемое количество времени, если контроллер обнаружил изменение в состоянии команды помпажа компрессора и/или фильтра ПКК. Так как помпаж может быть активен и/или клапан ПКК открыт на относительно короткое время (например, на одну секунду), вторым фильтром можно сгладить вариации сигнала доли РОГ от датчика ПД, возникающие из-за помпажа и/или положения клапана ПКК. То есть, вторая фильтрация сигнала доли РОГ от датчика ПД на этапе 222 сохраняет оценку РОГ относительно стабильной, даже когда точность датчика ПД может быть низкой (например, точность датчика равняется 1) при событии открытия или закрытия клапана ПКК и/или при возникновении помпажа. Если на этапе 218 контроллер не определил изменения состояния команды помпажа компрессора или клапана ПКК (например, если точность ПД не равна 1), то контроллер может перейти на этап 220 и не пропускать через второй фильтр сигнал доли РОГ от датчика ПД.
С любого из этапов 220 или 222 контроллер может перейти к этапам, показанным на фиг. 2 В. Затем способ 200 может перейти с этапов, показанных на фиг. 2А на этап 224, показанный на фиг. 2 В, и контроллер может определить, увеличивается ли поток ПВК (принудительной вентиляции картера), идущий из картера двигателя. Как было описано выше, увеличение потока ПВК может быть увеличением потока ПВК через впускной канал и за впускной датчик кислорода. Увеличение потока ПВК и/или продувочного потока (например, продувочного потока из канистры улавливания топливных паров двигателя) может снизить точность датчика кислорода. В частности, оценки РОГ по показаниям датчика кислорода могут быть завышенными, так как датчик кислорода может воспринимать в качестве газов РОГ дополнительные углеводороды из системы ПВК и/или продувочные газы. В частности, увеличение содержания углеводородов в результате поступления газов ПВК и/или продувочных газов может привести к снижению концентрации кислорода, регистрируемой датчиком кислорода, что в свою очередь может привести к завышению оценки потока РОГ. Если на этапе 224 контроллер определит, что ПВК увеличивается, то он перейдет на этап 226 и может отрегулировать сигнал ПВК по третьему пороговому значению. То есть, когда сигнал ПВК превысит третье пороговое значение, контроллер может увеличить выходной сигнал ПВК с фильтра этапа 210. Для гарантирования того, что оценка точности датчика кислорода не будет завышена, третье пороговое значение может быть ближе к текущему значению, чем ближайшее более высокое значение. В одном примере, контроллер может отрегулировать сигнал ПВК, применив компаратор к выходному сигналу фильтра этапа 210, который использует пороговое значение, далекое от следующего целочисленного значения, так чтобы выходной сигнал компаратора изменял целочисленное состояние после того, как фильтрованный выходной сигнал с этапа 210 окажется в пределах большого калибруемого значения (фиксированного или в процентах) следующего более высокого целочисленного значения. Другими словами, пороговое значение компаратора будет ближе к текущему целочисленному значению, чтобы компаратор изменял целочисленное состояние после того как фильтрованный выходной сигнал с этапа 1 окажется в пределах малого калибруемого значения (фиксированного или в процентах) текущего целочисленного значения. То есть, присвоенное сигналу задействования ПВК целочисленное значение может быть увеличено при малом увеличении фильтрованного сигнала задействования ПВК от датчика с этапа 210. Применение порогового значения компаратора, которое близко к текущему целочисленному значению фильтрованного сигнала задействования ПВК на этапе 210 только тогда, когда флаг увеличивается с 0 до 1, не задержит время, в которое сигнал ПВК увеличивает целочисленное значение до тех пор, пока не будет вероятным то, что объем аксиальной диффузии прошел датчик кислорода, и может ограничить завышение оценок точности датчика кислорода в результате действия ПВК. И наоборот, применение на этапе 210 к фильтрованному сигналу задействования ПВК порогового значения, удаленного от текущего целочисленного значения, когда сигнал уменьшается, задержит время, в которое сигнал уменьшит целочисленное значение, тем самым уменьшив значение, когда конец объема аксиальной диффузии достигнет датчика кислорода, и снова ограничит завышение оценки точности датчика кислорода.
В другом осуществлении, контроллер может не применять фильтр на этапе 210 перед применением компаратора (или применить его с постоянной фильтра, равной 0) для случаев когда целочисленное значение задействования ПВК увеличивается. Пороговое значение компаратора может быть удалено от текущего целочисленного значения задействования ПВК, что приведет к тому, что выходной сигнал компаратора изменит состояние на следующее наивысшее целочисленное значение сразу же при увеличении целочисленного значения задействования ПВК при поступлении в компаратор на этапе 224.
Как раскрыто подробнее ниже со ссылкой на фиг. 4, поток ПВК во впускной системе можно оценить по впускному давлению в коллекторе, и можно классифицировать, как присутствующий или отсутствующий (например, присвоив сигналу ПВК целочисленное значение 0 или 1). В одном примере, ПВК и/или продувка могут быть определены как задействованные или незадействованные (например, течет или не течет их поток во впускной канал и за датчик кислорода) по положению клапана PCV и/или продувочного клапана канистры улавливания топливных паров. В другом примере, ПВК и/или продувка могут быть определены как задействованные или незадействованные (например, течет или не течет их поток во впускной канал и за датчик кислорода) по наддуву двигателя (например, работает двигатель с наддувом или без наддува). То есть, при не применении фильтра на этапе 210, применение фильтра с 0 постоянной времени и использовании порогового значения компаратора, которое удалено от текущего целочисленного значения задействования ПВК, или при применении фильтра с «нормальной» постоянной времени и при использовании компаратора с пороговым значением, близким к текущему целочисленному значению задействования ПВК, контроллером будут регистрироваться (например, регистрироваться мгновенно) любые повышения уровней ПВК, и сигнал ПВК может быть установлен на «задействована» (с присвоением значения 1), так что соответственно может быть занижена оценка точность датчика кислорода. Тем самым можно уменьшить завышение оценок точности датчика кислорода. И наоборот, если на этапе 224 поток ПВК не увеличивается, то контроллер может перейти на этап 228 и отрегулировать сигнал ПВК по четвертому пороговому значению. То есть, когда сигнал ПВК уменьшится больше чем на третье пороговое значение, контроллер может уменьшить выходной сигнал ПВК с фильтра этапа 210. Для гарантирования того, что оценка точности датчика кислорода не будет завышена, четвертое пороговое значение может быть дальше от текущего значения ПВК, чем ближайшее более низкое значение. В одном примере, контроллер может отрегулировать сигнал ПВК, применив к фильтрованному выходному сигналу фильтра этапа 210 компаратор с пороговым значением, далеким от текущего целочисленного значения, тем самым задержав время, в которое сигнал задействования ПВК уменьшит целочисленное значение, тем самым уменьшив значение, при котором конец объема аксиальной диффузии достигнет датчика кислорода, и снова ограничив завышение оценок точности датчика кислорода. Фильтр и компаратор сигнала ПВК могут гарантировать то, что углеводороды ПВК больше не присутствуют во впускной системе, до того, как сигнал ПВК будет отрегулирован на «не задействована» (присвоено значение 0) и после этого отрегулирована точность датчика кислорода (например, увеличена).
Способ 200 с любого из этапов 226 или 228 может перейти на этап 230, на котором контроллер может определить, увеличивается ли поток из системы продувки канистры топливных паров и во впускной канал выше по потоку от датчика входного кислорода. Аналогично этапу 224, если на этапе 230 контроллер определит, что продувка увеличивается, тогда он перейдет на этап 232 и может отрегулировать сигнал продувки по пятому пороговому значению. То есть контроллер может увеличить по пятому пороговому значению выходной сигнал продувки с фильтра этапа 210, если сигнал продувки увеличиться больше, чем на пятое пороговое значение. Пятое пороговое значение может находиться ближе к текущему сигналу продувки, чем наиближайшее к текущему значению более высокое значение, чтобы гарантировать то, что оценка точности датчика кислорода не будет завышена. В одном примере, контроллер может применить к выходному сигналу фильтра с этапа 210 компаратор, использующий пороговое значение, далекое от следующего более высокого целочисленного значения, чтобы выходной сигнал компаратора изменял целочисленное состояние после того, как фильтрованный выходной сигнал продувки с этапа 210 окажется в пределах большого калибруемого значения (фиксированного или процентного) следующего более высокого целочисленного значения. Другими словами, пороговое значение компаратора будет близким к текущему целочисленному значению, так что компаратор изменяет целочисленное состояние после того, как фильтрованный выходной сигнал с этапа 210 окажется в пределах малого калибруемого значения (фиксированного или процентного) текущего целочисленного значения. То есть, значение точности, присвоенное датчику задействования продувки, может быть увеличено при небольшом увеличении выходного фильтрованного сигнала точности датчика с этапа 210. Применение близкого к текущему целочисленному значению порогового значения компаратора к фильтрованному сигналу задействования продувки с этапа 210 когда флаг изменит значение с 0 до 1 не задержит время, в которое сигнал задействования продувки повысит целочисленное значение до момента, пока не будет вероятно то, что объем аксиальной диффузии не будет пройден датчиком кислорода, и может ограничить завышение точности датчика кислорода в результате продувки.
В другом осуществлении, контроллер может не применять фильтр на этапе 210 (или применить его с постоянной фильтра, равной 0) для случаев, когда целочисленное значение задействования продувки увеличивается. Кроме того, контроллер может использовать пороговое значение компаратора, удаленное от текущего целочисленного значения задействования продувки, что приведет к тому, что выходной сигнал компаратора изменит состояние на следующее наивысшее целочисленное значение сразу же при увеличении целочисленного значения задействования продувки при поступлении в компаратор на этапе 224.
Если на этапе 230 контроллер определит, что продувка не увеличивается, тогда он может перейти на этап 234 и отрегулировать сигнал продувки по шестому пороговому значению. То есть контроллер может уменьшить по шестому пороговому значению выходной сигнал продувки с фильтра этапа 210, если сигнал продувки уменьшиться больше, чем на шестое пороговое значение. Шестое пороговое значение может находиться дальше от текущего значения сигнала продувки, чем наиближайшее к текущему значению более низкое значение, чтобы гарантировать то, что оценка точности датчика кислорода не будет завышена. В одном примере, контроллер может применить к выходному сигналу фильтра с этапа 210 компаратор, использующий пороговое значение, далекое от текущего целочисленного значения, когда фильтрованный сигнал уменьшается и может задержать время, когда сигнал задействования продувки уменьшается в целочисленном значении, тем самым уменьшая значения, когда конец объема аксиальной диффузии достигнет датчика кислорода, тем самым ограничив завышение оценок точности датчика кислорода.
Как описано подробнее ниже со ссылкой на фиг. 4, поток продувки можно оценить по впускному давлению в коллекторе, и можно классифицировать, как присутствующий или отсутствующий (например, присвоив сигналу продувки целочисленное значение 0 или 1). То есть, любое повышение уровней продувки будет немедленно регистрироваться контроллером, так что сигнал продувки будет отрегулирован на «задействованный» (то есть ему будет присвоено целочисленное значение 1) и точность датчика кислорода будет соответственно понижена. То есть, можно снизить завышения точности датчика кислорода. Фильтр и компаратор сигнала продувки могут гарантировать то, что углеводороды продувки больше не присутствуют во впускной системе, до того, как сигнал продувки будет отрегулирован на «не задействована» и после этого отрегулирована точность датчика кислорода (например, увеличена). Важно отметить, что контроллер может альтернативно пройти через этапы 230-234 перед выполнением этапов 224-228. В других примерах, контроллер может выполнить обе последовательности этапов способа в одно и то же время (например, одновременно).
После анализа сигналов ПВК и продувки, контроллер может перейти на этап 236 и рассчитать окончательную точность датчика кислорода (например, значение окончательной точности). Базовая первая точность датчика кислорода с этапа 206 может быть обновлена в зависимости от того, имеется ли вероятность присутствия углеводородов ПВК и/или продувки в местоположении датчика кислорода (например, используя целочисленные сигналы задействования продувки и задействования ПВК). Как будет рассмотрено далее по тексту со ссылкой на фиг. 4, базовая первая точность датчика кислорода может быть целочисленным значением от 0 до 2. Если базовая первая точность датчика кислорода будет равна 0 (что будет говорить о том, что датчик кислорода не готов, неисправен, или о том, что не была выполнена компенсация давления холостого хода), тогда контроллер может присвоить датчику кислорода окончательную точность 0 (не готов или неисправен). Если базовая первая точность датчика кислорода будет 1 и 2 (что будет говорить о том, что датчик кислорода не выполнил компенсацию более высокого давления, и когда он ее выполнил соответственно), и будет обнаружено, что углеводороды продувки и ПВК не присутствуют на датчике кислорода (о чем будут говорить равные нулю целочисленные сигналы как задействования ПВК так задействования и продувки), тогда базовая окончательная точность может повыситься на величину единицы относительно целочисленного значения базовой точности. Например, если на датчике кислорода не обнаружено газов ПВК и продувки, и базовая точность датчика кислорода составляет 1, тогда окончательной точности датчика кислорода буде присвоено значение 2. То есть, окончательной точности датчика кислорода может быть присвоено целочисленное значение от 0 до 3. Тем не менее, если на датчике кислорода обнаруживается присутствие газов продувки и/или газов ПВК, базовая первая точность датчика сохраняется в окончательной точности датчика кислорода. Например, если или на датчике кислорода обнаруживают присутствие газов продувки и/или газов ПВК, а базовая первая точность составляет 2, то окончательная точность, присвоенная датчику кислорода может быть также равной 2.
Таким образом, контроллер может проследовать по этапам 224 - 236 для расчета окончательной точности датчика кислорода, учитывающей присутствие углеводородов продувки и/или ПВК, которые могут повлиять на выходной сигнал датчика кислорода. Аналогичным образом, на этапах с 212 до 222 контроллер может рассчитать окончательную точность ПД, которую можно использовать для регулирования оценки доли РОГ по показаниям датчика ПД, в зависимости от одного или более из следующих условий: активен помпаж и открыт клапан ПКК. После того, как на этапе 236 контроллер рассчитает окончательную точность датчика, будут собраны и совмещены во времени с учетом пространственной задержки и аксиальной диффузии все сигналы, необходимые для расчета окончательной доли РОГ, включая долю РОГ по ПД, долю РОГ по датчику кислорода, допуски ПД, точность ПД и точность датчика кислорода. Затем эти сигналы позже могут быть использованы контроллером в способе 200 для определения окончательной доли газа РОГ во впускном воздухе, что более подробно будет рассмотрено далее по тексту. Следует отметить, что в других примерах контроллер может выполнять этапы 224-236 одновременно с этапами 212-222. В других возможных примерах контроллер может выполнять этапы 224-236 перед выполнением этапов 212-222.
Способ 200 может перейти с этапа 236 на этап 238, и контроллер может рассчитать долю газов РОГ во впускном воздухе, по оценке потока РОГ по ПД, по оценке потока РОГ по датчику кислорода, значение точности ПД, значение допусков РОГ по ПД и значение точности датчика кислорода (например, окончательное значение точности). Например, в памяти контроллера может храниться таблица с правилами принятия решений, включающая в себя значения точностей датчика ПД и датчика кислорода, что будет рассмотрено далее по тексту со ссылкой на фиг. 5. Правила принятия решений могут включать в себя команды определения того, как использовать доли РОГ по данным датчиков кислорода и ПД, а также оценки допусков ПД для получения окончательной оценки доли РОГ. В частности, значения точности, присвоенные датчику ПД на этапе 214 или 216, и датчику кислорода на этапе 236, могут соответствовать конкретной команде или сочетанию сигналов РОГ в таблице (например, блок схема 500 на фиг. 5) хранящимся в памяти контроллера и которые могут быть использованы в дальнейшем для определения окончательной доли газов РОГ во впускном воздухе. Например, если значения точности как датчика ПД, так и датчика кислорода оба будут равняться 2, контроллер может решить, что соответствующая команда в справочной таблице требует, чтобы для получения окончательной оценки потока РОГ (смотри фиг 5, где показаны команды, соответствующие значениям точности 2) должна быть использована оценка доли РОГ по показаниям датчика кислорода. Тем не менее, оценка потока РОГ может быть ограничена значением в границах допусков ПД оценки доли РОГ по показаниям датчика ПД. То есть, если оценка доли РОГ по показаниям датчика кислорода окажется ниже нижней границы допусков датчика ПД, тогда окончательная оценка доли РОГ может иметь значение нижней границы допусков датчика ПД. Другими словами, оценка доли РОГ по данным датчика кислорода может быть обрезана по границам допусков датчика ПД, если оценка доли РОГ окажется за границами допусков (смотри фиг. 5, где более подробно раскрыты правила вынесения решений для определения окончательной доли РОГ). То есть окончательная оценка доли РОГ может быть комбинированной оценкой доли РОГ, в которую могут входить сигналы и от датчика кислорода и от датчика ПД (например, доля РОГ от датчика кислорода, доля РОГ от датчика ПД, точность датчика кислорода, точность датчика ПД и допуски ПД).
После определения окончательной доли газа РОГ во впускном воздухе на этапе 238, контроллер может перейти на этап 240 для определения того, превышает или не превышает скорость изменения оцененной доли РОГ свое пороговое значение.
В одном примере пороговая скорость изменения доли РОГ может быть разностью между только что оцененной долей РОГ и самой свежей из оцененных до нее долей РОГ (например, окончательной комбинированной долей РОГ). В других примерах пороговой скоростью изменения доли РОГ может быть величина, на которую флюктуирует оцененная доля РОГ за предустановленное время. Если скорость изменения доли РОГ на этапе 240 окажется меньше порогового значения, тогда контроллер может перейти к этапу 241 для оставления без изменения окончательной доли РОГ, определенной на этапе 238. Тем не менее, если на этапе 240 контроллер определит, что скорость изменения доли РОГ превышает пороговое значение, тогда способ 200 может перейти к этапу 242 и контроллер может ограничить скорость изменения доли РОГ верхним пороговым значением. Если поток РОГ остается постоянным, оцененный контроллером поток РОГ может все-таки измениться, так как он зависит от точностей датчика ПД и датчика кислорода. То есть, оцененный поток РОГ может измениться в зависимости от оценок состояния точности датчиков. Изменения точности любого из датчиков могут привести к изменениям правила вынесения решения для определения того, как сигналы датчика могут быть встроены в окончательную оценку потока РОГ. То есть, скорость изменения доли РОГ может быть ограничена верхним порогом, так, чтобы изменения в оцененной доле РОГ могли бы отражать фактические изменения в потоке РОГ, а не изменения в правилах вынесения решений, используемых для расчета окончательной оценки доли РОГ. В одном примере, верхний порог может быть предустановленной константой, хранящейся в памяти контроллера. В другом примере, если имеется изменение точности датчиков и правила вынесения решения, диктующего то, как использовать сигналы датчика для расчета окончательного потока РОГ, верхним порогом может быть изменение доли РОГ, которое бы произошло, если бы не было изменено правило вынесения решения. Еще в одном примере, верхний порог может быть больше или предустановленной константы или изменения доли РОГ, которое произошло бы, если бы отсутствовали изменения в правиле вынесения решения. С любого из этапов 241 или 242 способ 200 может перейти на этап 244, и по окончательной оценке доли РОГ контроллер может выполнить регулировку клапана РОГ (например, клапана 121 РОГ). В частности, контроллер может отрегулировать положение клапана РОГ по окончательной оценке доли РОГ и желаемой доле РОГ. Если оцененная доля РОГ будет меньше желаемой доли РОГ, контроллер может отрегулировать (например, открыть) клапан РОГ для того чтобы больше газов РОГ рециркулировалось бы во впускную систему. И наоборот, если оцененная доля РОГ превысит желаемую долю РОГ, контроллер может отрегулировать (например, прикрыть) клапан РОГ для того, чтобы во впускную систему рециркулировалось бы меньше газов РОГ. Желаемая доля РОГ может определяться условиями работы двигателя, например, частотой вращения и нагрузкой двигателя. Затем способ может совершить операцию возврата.
На фиг. 3 показана блок- схема способа 200 оценивания точности датчика ПД (например, датчика 125 ПД), используемого для оценивания потока РОГ в различных условиях работы двигателя. Инструкции для выполнения способа 300 могут храниться в памяти контроллера двигателя, такого как контроллер 12, показанный на фиг. 1. Кроме того, способ 200 может выполняться контроллером. Важно отметить, что способ 300 может работать непрерывно во время работы двигателя. То есть, контроллер может непрерывно обновлять точность датчика ПД. В некоторых примерах контроллер может также сохранять величины точности в памяти контроллера.
Способ 300 начинается этапом 302 и контроллер (например, контроллер 12) оценивает и/или измеряет условия работы двигателя, исходя из данных обратной связи от некоторого количества датчиков. Условия работы двигателя могут включать в себя частоту вращения и нагрузку двигателя, массовый расход впускного воздуха, давление в коллекторе, положение клапана ПКК, положение клапана ПВК, положение продувочного клапана, наддув двигателя и т.д. Контроллер может перейти па этап 304 и оценить первый расход РОГ через клапан РОГ (например, клапан 121 РОГ) и допуски датчика ПД (например, датчика 125 ПД). В частности, оценка потока РОГ может определяться выходным сигналом датчика ПД и проходным сечением потока клапана РОГ. Проходное сечение клапана РОГ можно определить по известному поперечному сечению клапана РОГ и положению клапана РОГ по выходному сигналу датчика положение клапана РОГ (например, датчика 131 подъема клапана РОГ). То есть, сигналы от системы ПДНК, содержащей датчик ПД, клапан РОГ и датчик положения клапана РОГ могут быть совместно использованы контроллером для определения расхода РОГ. Допуски (то есть допуск оценки) могут быть рассчитаны по известному взаимоотношению между допусками и изменению давления между входом и выходом клапана РОГ и оцененной или известной площади проходного сечения клапана. То есть, контроллер может справиться о допусках, соответствующих изменениям давления между входом и выходом клапана РОГ по выходному сигналу датчика ПД. Допуски могут дать пределы ошибки выше и ниже оценки потока РОГ. Другими словами, допуски дают оценку потока РОГ в пределах значений, отцентрованных на первой оценке расхода РОГ. После того, как контроллер оценит расход РОГ по показаниям датчика ПД, способ 300 может перейти на этап 306 и контроллер может преобразовать поток РОГ в долю газов РОГ во впускном воздухе. Это может быть достигнуто делением расхода РОГ, оцененного на этапе 304 на полный расход смеси на входе компрессора (например, компрессора 122). Доля газов РОГ во впускном воздухе и допуски ПД, рассчитанные на этапах 306 и 304 соответственно затем могут быть использованы на этапе 204 способа 200, изображенного на фиг. 2А. То есть, расход РОГ может быть преобразован в долю РОГ, так как ранее было рассмотрено со ссылкой на способ 200 с фиг. 2А - 2В, оценки РОГ по показаниям датчика ПД и датчика кислорода (например, датчика кислорода 168) могут быть включены в окончательную оценку доли РОГ. Так как выходные сигналы датчика кислорода дают изменения потока РОГ в единицах доли газов РОН во впускном воздухе, оцененный датчиком ПД расход РОГ может потребовать его преобразования в общие с датчиком кислорода единицы измерения для прямого сравнения.
Способ 300 может перейти на этап 308 и контроллер может определить, был или не был установлен флаг неисправности датчика ПД. Флаг неисправности датчика ПД может включать в себя указание на то, что датчик ПД не готов к работе. В одном примере, со временем и по мере эксплуатации двигателя на клапане РОГ может накапливаться сажа, которая может искажать сигналы датчика ПД. Если контроллер определит, что на клапане РОГ скопилась сажа свыше некоторого предела, который можно компенсировать, тогда он может выдать сигнал установки флага неисправности датчика ПД. Аналогично, контроллер также может выдать сигнал неисправности датчика ПД, если датчик ПД, измеряет давление на открытии клапана или датчик ПД измеряет степень открытия клапана (или, возможно, подъем клапана). Если контроллер определяет, что датчик ПД неисправен или неработоспособен, тогда контроллер может перейти на этап 310 и установить точность датчика ПД на 0. С этапа 310 способ может совершить операцию возврата. Если на этапе 308 контроллер определит, что флаг неисправности датчика ПД не был установлен, тогда контроллер может перейти на этап 312 для определения того, не происходит одного или более из следующего: активен помпаж компрессора или открыт или открывается клапан ПКК (например, ПКК 151 и/или 155). Если ПКК открывается и/или открыт, или активен помпаж компрессора (например, в компрессоре происходит помпаж), тогда контроллер может перейти на этап 314 и установить точность датчика ПД на 1. Затем способ может совершить операцию возврата. Однако если и ПКК закрыт и помпаж не активен, способ 300 может перейти на этап 316 и контроллер может определить, не превышает ли изменение давления между входом и выходом клапана РОГ (например, выходной сигнал перепада давления датчика ПД) более высокое первое пороговое значение. Если перепад давления на клапане РОН превышает первое более высокое значение, тогда контроллер может продолжить работу на этапе 318 и установить точность датчика ПД на 3. Затем способ может совершить операцию возврата. Если изменение давления между входом и выходом клапана РОГ по показаниям датчика ПД меньше первого более высокого порогового значения, тогда контроллер может продолжить выполнение на этапе 320 и определить, не меньше ли изменение давления между входом и выходом клапана РОГ более низкого второго порогового значения. Первое и второе пороговые значения могут быть предустановленными и храниться в памяти контроллера, причем второе пороговое значение будет меньше первого порогового значения. Если изменение давления между входом и выходом клапана РОГ будет меньше более низкого второго порогового значения, тогда контроллер может перейти на этап 322 и установить точность датчика ПД на 2. После этого способ может совершить операцию возврата. Тем не менее, если изменение давления между входом и выходом клапана РОГ будет выше более низкого второго порогового значения, тогда изменение давления между входом и выходом клапана может оказаться между первыми вторым пороговыми значениями, и контроллер может перейти на этап 324 и определить, не было ли самое свежее значение точности ПД нулем или единицей. Если последнее зарегистрированное значение точности датчика ПД было равно 0 или 1, контроллер может перейти на этап 322 и установить точность датчика ПД на 2. Однако, если контроллер определит, что на этапе 324 предшествующая точность ПД составила 2 или 3, тогда контроллер может оставить без изменения предшествующее значение точности на этапе 326. Затем способ может совершить операцию возврата. Значения точности, присвоенные сигналам датчика ПД могут в дальнейшем использоваться в качестве исходных данных на этапе 200 по фиг. 2А.
Таким образом, способ 300 может включать в себя оценивание доли газов РОГ во впускном воздухе, а также оценивание допусков датчика ПД, что дает приемлемую предельную ошибку оценки доли РОГ. Кроме того, способ 300 может включать в себя присвоение точности сигналу датчика ПД по флагу неисправности датчика, по помпажу компрессора, статуса ПКК и изменение давления между входом и выходом клапана РОГ. То есть, способ 300 может включать в себя оценивание доли РОГ в диапазоне и расчет точности оценки доли РОГ по условиям работы двигателя. Значение точности, присвоенное датчику ПД, оценка доли РОГ и допуски датчика ПД могут быть использованы в способе 200, рассмотренном выше со ссылкой на фиг. 2А - фиг. 2В для расчета окончательной доли РОГ, включающей в себя и сигналы датчика ПД и выходные сигналы от датчика кислорода (например, датчика 168 кислорода). В частности, сигналы точности, допусков и доли РОГ от датчика ПД можно далее обработать фильтрацией и совмещением по времени с датчиком кислорода. Обработанные сигналы затем могут быть использованы для оценивания окончательной доли РОГ по правилам вынесения решений, что подробнее будет обсуждено ниже со ссылкой на фиг. 5.
На фиг. 4 показана блок-схема способа 400 для оценивания доли газов РОГ во впускном воздухе двигателя с использованием датчика кислорода (например, датчика 168) кислорода и оцениванием точности выходных сигналов датчика кислорода. Инструкции для выполнения способа 400 могут храниться в памяти контроллера двигателя, например, контроллера 12, показанного на фиг. 1. Кроме того, способ 400 может выполняться контроллером. Важно отметить, что способ 400 может выполняться непрерывно во время работы двигателя. То есть, контроллер может непрерывно обновлять точность датчика кислорода. В некоторых примерах, контроллер также может хранить значения точности в памяти контроллера.
Способ 400 начинается на этапе 402 и контроллер (например, контроллер 12) по данным обратной связи от некоторого количества датчиков оценивает и/или измеряет условия работы двигателя. К условиям работы двигателя могут относиться частота вращения двигателя и нагрузка двигателя, массовый расход впускного воздуха, давление в коллекторе, положение клапана ПКК, положение клапана ПВК, положение продувочного клапана и т.п. После того, как будут оценены и/или измерены условия работы двигателя, контроллер может продолжить выполнение способа на этапе 404 и оценить поток РОГ с использованием датчика кислорода. Датчик кислорода может использоваться для оценивания впускной концентрации кислорода и логического вывода доли РОГ во впускном воздухе из изменения впускной концентрации кислорода при открытии клапана РОГ (например, клапана 121 РОГ). В частности, изменение выходного сигнала датчика при открытии клапана РОГ сравнивают с эталонной точкой, в которой датчик работает без РОГ (нулевая точка). По изменению (например, уменьшению) количества кислорода с момента работы без РОГ, можно рассчитать поток РОГ, в настоящее время подаваемой в двигатель. Например, при подаче на датчик эталонного напряжения (Vs), датчик выдает ток (lp) накачки. Изменение концентрации кислорода может быть пропорциональным изменению (delta lp) тока накачки, выдаваемого датчиком в присутствии РОГ по сравнению с выходным сигналом датчика в отсутствии РОГ (нулевая точка). Доля газов РОГ во впускном воздухе, оцененная с использованием выходных сигналов с датчика кислорода, может затем использоваться в качестве входной информации на этапе 206 способа 200, показанного на фиг. 2А - 2В. То есть, оцененная на этапе 404 доля кислорода может быть использована в описанном выше со ссылкой на фиг. 2А - 2В способе 200 для расчета окончательной оценки РОГ, включающей в себя сигналы от датчика кислорода и отдатчика ПД (например, датчика 125 ПД).
Способ 400 может продолжиться этапом 460, и контроллер может определить, был ли выполнен алгоритм адаптации датчика кислорода на холостом ходу. В одном примере, алгоритм адаптации на холостом ходу может включать в себя нахождение одного или нескольких поправочных коэффициентов нулевой точки или базовой линии датчика кислорода при известном давлении. Если датчик кислорода расположен выше по потоку от дроссельной заслонки, то поправочный коэффициент может определяться известным барометрическим давлением, достигаемым на датчике кислорода при условиях холостого хода. Если контроллер определит, что адаптация датчика кислорода на холостом ходу не была выполнена (или определит, что датчик кислорода неисправен), тогда контроллер перейдет на этап 408 и установит на 0 базовую точность датчика кислорода. Если же адаптация датчика кислорода на холостом ходу была выполнена, тогда способ 400 переходит на этап 410 и определяет, была ли выполнена адаптация датчика кислорода по давлению. Адаптация по давлению может включать в себя исправление выходных сигналов датчика кислорода по показаниям при повышенных впускных давлениях в месте расположения датчика кислорода, вплоть до максимальных ожидаемых рабочих давлениях датчика кислорода в данном применении. Датчики кислорода могут обладать зависимостью от давления, которая может оказать влияние на диффузионные свойства чувствительного элемента, результатом чего станет ошибка коэффициента усиления выходного тока накачки датчика. Для измерений с переменным напряжением (VV) это может быть существенным фактором шума. Для учета таких ошибок, выходной сигнал датчика кислорода может быть исправлен по текущему измеренному давлению, поправочным коэффициентом на сухой воздух и поправочным коэффициентом зависимости от давления, исходя из условий по водяному пару вокруг впускного датчика кислорода. Если адаптация по давлению не была выполнена, то на этапе 412 контроллер может установить базовую точность датчика кислорода на 1. Если адаптация по давлению была выполнена, то на этапе 414 контроллер может установить базовую точность датчика кислорода на 2.
То есть, способ 400 на этапах с 406 по 414 может включать в себя присвоение датчику кислорода значения базовой точности, исходя из того, была ли обнаружена неисправность датчика кислорода, был ли выполнен алгоритм адаптации на холостом ходу и был ли выполнен алгоритм адаптации по давлению. Тем не менее, на показания датчика кислорода также могут влиять углеводороды потока продувки и/или потока ПВК. В частности, датчик кислорода может завышать оценку потока РОГ, когда через впускную систему протекают углеводороды потоков продувки или ПВК, так как датчик кислород может воспринимать углеводороды газов продувки или ПВК как углеводороды газов РОГ. Следовательно, способ 400 на этапах с 416 по 426 может включать в себя определение того, не протекают ли во впускной системе газы продувки и/или ПВК, и не существует ли риска их влияния на выходной сигнал датчика кислорода. Тем не менее, так как входы продувки и ПВК (например, тракт 195 удаления топливных паров и тракт 198 ПВК) находятся на расстоянии вверх по потоку от датчика кислорода, сигналы ПВК и продувки, принимаемые контроллером в способе 400, могут иметь задержку по времени и могут отфильтровываться перед тем, как включаться в окончательную точность датчика кислорода. В частности, как было рассмотрено выше для способа 200 со ссылкой на фиг. 2А - 2В, сигналы ПВК и продувки могут быть отрегулированы для учета того времени, которое требуется впускному газу дойти от входов продувки и ПВК до датчика кислорода.
Возвращаясь к способу 400, - контроллер может с этапа 414 перейти на этап 416 и определить, не активна ли продувка и не протекают ли углеводороды от входа продувки через впускную систему двигателя. Продувка может быть активна, если давление воздуха в коллекторе превышает первое пороговое значение. Пороговое значение может быть предустановленным и хранящимся в памяти контроллера. Например, пороговое значение может быть барометрическим давлением (например, давлением окружающего воздуха). Если давление воздуха в коллекторе равно первому пороговому значению или меньше него (например, когда двигатель работает без наддува), и не активна продувка, тогда контроллер может перейти на этап 418 и установить флаг продувки на 0, что будет означать, что углеводороды продувки не протекают через продувочное окно. Если контроллер определит, что продувка активна, тогда он может перейти на этап 420 и установить флаг продувки на 1, что будет означать, что продувка активна. Способ 400 с любого из этапов 418 или 420 может перейти на этап 422, на котором контроллер может определить, не активна ли ПВК, и не протекают ли углеводороды ПВК через окно ПВК. Контроллер может определить, что ПВК активна если давление воздуха в коллекторе превышает барометрическое давление, что означает, что двигатель работает под наддувом. Если на этапе 422 контроллер определит, что давление воздуха в коллекторе не превышает барометрического давления и что ПВК не активна, тогда способ 400 может продолжиться этапом 424 и контроллер может установить флаг ПВК на 0, что будет означать, что ПВК не активна. Тем не менее, если на этапе 422 контроллер определит, что давление воздуха в коллекторе превышает барометрическое давление, тогда контроллер может установить флаг ПВК на 1, указывая на то, что ПВК активна. То есть, способ 400 может включать в себя выяснение того, не протекают ли по впускной системе двигателя газы продувки и ПВК. Потоки газов продувки и ПВК во впускной системе можно сохранить в памяти контроллера и использовать в способе 200 для нахождения окончательной оценки точности датчика кислорода, как было подробно рассмотрено выше со ссылкой на фиг. 2А - фиг. 2В. Следует также отметить, что в одном примере этапы 422-426 способа могут выполняться одновременно с этапами 416-420. В другом примере, этапы 422-426 могут выполняться раньше этапов 416-420. Кроме того, контроллер может рассчитать базовую точность датчика кислорода (404-414) в то же самое время, как он будет оценивать потоки продувки и/или ПВК (416-426). В другом возможном примере, контроллер может оценить потоки продувки и/или ПВК (416-426) до расчета базовой точности датчика кислорода (404-414).
На фиг. 5 блок-схема 500 показывает таблицу, служащую для определения того, как оценивать долю газов РОГ во впускном воздухе с применением датчика ПД (например, датчика 125 ПД) и датчика кислорода (например, датчика 168 кислорода). В качестве одного примера, блок-схема 500 может быть использована контроллером (например, контроллером 12) в способе 200, рассмотренным выше со ссылкой на фиг. 2А - 2В. Точнее, блок-схема 500 может содержать правила вынесения решений, используемые на этапе 238 в способе 200, как было подробно рассмотрено выше со ссылкой на фиг. 2А - фиг. 2В. Однако важно отметить, что содержащиеся в блок-схеме 500 правила вынесения решений являются лишь примерами правил вынесения решений, которые можно использовать в способе 200. В других осуществлениях дополнительные или альтернативные правила вынесения решений могут быть использованы контроллером для выдачи окончательной оценки доли РОГ, включающей в себя выходные сигналы и от датчика кислорода и от датчика ПД, и основанной на значениях точности измерений двух разных датчиков. То есть, блок-схема 500 может быть использована контроллером для выдачи окончательной оценки доли газов РОГ во впускном воздухе по точностям датчика кислорода и датчика ПД, причем оцениваемые доли РОГ используют сигналы обоих датчиков и допуски датчика ПД. Следует отметить, что поскольку блок-схема 500 используется на этапе 238 способа 200, сигналы для оценки доли РОГ от датчика ПД, точность датчика ПД и допуски ПД могут быть уже совмещены по времени с датчиком кислорода и надлежащим образом пропущены через фильтр перед тем как использовать правила вынесения решений в блок-схеме 500 для выдачи окончательной оценки доли РОГ. Например, если точность ПД равна 1 (например, активен помпаж компрессора и/или открыт клапан ПКК), сигнал доли РОГ от датчика ПД может быть уже пропущенным через второй фильтр (с более низкой частотой среза) на этапе 222 способа 200. Точнее, частота среза, то есть частота сигналов, которая может проходить через фильтр, может быть уменьшена во втором фильтре относительно первого фильтра, примененного к сигналу доли РОГ, когда точность датчика ПД больше 1. Для точностей ПД, равных 2 и 3, продувка может быть неактивной, и клапан ПКК может быть закрыт. Дополнительно, окончательная точность датчика кислорода была рассчитана на совмещенных по времени и фильтрованных сигналах ПВК и продувки. Поэтому, на этапе 238 способа 200 значения окончательной точности могут быть известны как для датчика ПД, так и для датчика кислорода. То есть контроллер может взять правило из блок-схемы 500, соответствующее точностям датчиков кислорода и ПД, и выдать окончательную долю РОГ по правилу вынесения решений, содержащемуся в таблице блок-схемы 500.
Как было подробно рассмотрено выше со ссылкой на фиг. 2А - фиг. 2В, углеводороды продувки и/или ПВК могут присутствовать во впускной системе (в месте расположения датчика кислорода) при значениях 1 или 2 точности датчика кислорода. При точности датчика кислорода, равной 0, датчик кислорода может быть неработоспособным из-за того, что не была выполнена адаптация на холостом ходу, что рассмотрено подробно со ссылкой на фиг. 4. При точности датчика кислорода, равной 3, углеводородов ПВК и/или продувки может не быть во впускной системе в месте расположения датчика кислорода, что было рассмотрено подробно со ссылкой на фиг. 2 и фиг. 4.
Точности датчика кислорода рассортированы в первом ряду столбцов блок-схемы 500 в убывающем порядке по точности слева направо. Точности ПД рассортированы по рядам первого столбца блок-схемы 500 в убывающем порядке по точности сверху вниз. Значения (например, от 0 до 3) точностей датчика ПД и датчика кислорода на блок-схеме 500 могут соответствовать значениям точностей датчиков кислорода и ПД, рассчитанным в способе 200, рассмотренным выше со ссылкой на фиг. 2А - 2В.
Рассматривая правила, включенные в блок-схему 500 для расчета окончательной доли газов РОГ во впускном воздухе, если точность либо датчика ПД, либо датчика кислорода равна 0, как в ячейках 505, 509, и 513-517, тогда контроллер может не выдавать (например, определять) оценку РОГ.
Если точность датчика кислорода составляет 1, а точность датчика ПД составляет 3, как показано в ячейке 510, тогда контроллер может использовать только оценку доли РОГ по показаниям датчика ПД для окончательной оценки доли РОГ. Другими словами, окончательная оценка РОГ может быть той же самой, что и оценка доли РОГ по показаниям датчика ПД.
Если точность датчика кислорода составит 1, а точность датчика ПД составит 1 или 2, как показано в ячейках 511 и 512, или если точность датчика кислорода составит 2, а точность датчика ПД превысит 0, как показано в ячейках 506-508, контроллер может ограничить оценку доли РОГ по показаниям датчика кислорода границами допусков датчика ПД. То есть, окончательная оценка доли РОГ может быть той же самой, что и оценка доли РОГ по показаниям датчика кислорода, полученная по данным датчика кислорода, если оценка доли РОГ по показаниям датчика кислорода окажется в границах допусков датчика ПД. Тем не менее, если оценка доли РОГ по показаниям датчика кислорода выйдет за границы допусков датчика ПД, тогда окончательная оценка доли РОГ, оцененная контроллером, может быть такой, как верхняя или нижняя граница допусков ПД, в зависимости от того, какая из них окажется ближе к доле РОГ, полученной по показаниям датчика кислорода.
Если точность датчика кислорода окажется на своем верхнем пороговом значении (например, на 3), а точность датчика ПД будет больше 0, как показано в ячейках 502-504, и будет определено отсутствие наличия водяного пара/капель на датчике кислорода, тогда контроллер может использовать оценку доли РОГ по показаниям датчика кислорода в качестве окончательной оценки доли газов РОГ во впускном воздухе. Верхнее пороговое значение точности датчика кислорода может быть максимальной достижимой точностью для датчика кислорода. Контроллер может определить, что верхнее пороговое значение было достигнуто, когда газы ПВК и продувки не протекали за датчик кислорода, датчик не был неисправен и выполнил алгоритм адаптации на холостом ходу, и водяной пар/капли не присутствовали на датчике кислорода. То есть, окончательная оценка доли РОГ может быть той же самой, что и оценка доли РОГ по показаниям датчика кислорода. В другом примере, если капли воды и/или водяной пар могут присутствовать в месте расположения датчика кислорода (из-за того, что выше по потоку от датчика кислорода из ОВН выходит конденсат), тогда контроллер может ограничить оценку доли РОГ по показаниям датчика кислорода границами допусков датчика ПД, как это было рассмотрено выше. Контроллер может определить, что капли воды и/или водяной пар могут присутствовать в месте расположения датчика кислорода, если конденсат будет выбрасываться из охладителя воздуха наддува, расположенного выше по потоку от датчика кислорода.
В других осуществлениях, значения точности, присвоенные датчикам ПД и кислорода, могут быть иными целочисленными значениями, чем те, что описаны в блок-схеме 500 (например, 0, 1, 2 и 3). Раз так, то правила вынесения решений могут быть присвоены другим соответствующим значениям точности датчиков кислорода и ПД, чем те, что указаны в блок-схеме 500. В других возможных осуществлениях, кроме тех правил вынесения решений, что указаны в блок-схеме 500, могут существовать и другие правила вынесения решений. Например, окончательная оценка доли РОГ может быть взвешенным средним оценок доли РОГ по показаниям датчиков ПД и кислорода, определяемым точностью датчиков ПД и кислорода. То есть, в окончательной оценке доли РОГ больший вес может иметь оценка доли РОГ по показаниям датчика кислорода. Например, если значение точности датчика ПД превышает значение точности датчика кислорода, то окончательная оценка доли РОГ может быть более близкой к оценке доли РОГ по показаниям датчика ПД, чем к оценке по показаниям датчика кислорода.
То есть, блок-схема 500 может включать в себя условия (например, правила) для определения того, как использовать выходные сигналы датчиков кислорода и ПД для расчета доли газов РОГ во впускном воздухе в зависимости от точностей датчиков в изменяющихся условиях работы двигателя. Точнее, для того, чтобы выдать окончательную оценку доли газов РОГ во впускном воздухе, контроллер может использовать либо оценку доли РОГ по показаниям датчика ПД, либо оценку доли РОГ по показаниям датчика кислорода, ограниченную допусками ПД.
Таким образом, способ для двигателя может включать в себя регулирование работы двигателя по окончательной оценке параметра газового потока, причем окончательная оценка параметра газового потока будет зависеть и от первого параметра газового потока, оцененного первым датчиком, и от второго параметра газового потока, оцененного вторым датчиком, расположенным на расстоянии от первого датчика в газовом канале двигателя, и также будет зависеть от значений точности и первого и второго параметров газового потока. Окончательной оценкой газового потока является окончательная оценка потока (РОГ) рециркуляции отработавших газов, причем регулирование работы двигателя включает в себя регулирование клапана РОГ по окончательной оценке потока РОГ, а окончательная оценка потока РОГ определяется и первым потоком РОГ, оцененным датчиком перепада давления между входом и выходом клапана РОГ, и вторым потоком РОГ, оцененным впускным датчиком кислорода, а также определяется значениями точности каждого из первого и второго потоков РОГ. Значения точности могут определяться условиями работы двигателя во время оценки первого потока РОГ и второго потока РОГ, причем значения точности являются целочисленными значениями от нуля до трех. Способ также может включать в себя следующее: присвоение первого значения точности первому потоку РОГ, исходя из всего из нижеперечисленного: помпаж компрессора, положение перепускного клапана компрессора и выходной сигнал перепада давления от датчика перепада давления. Способ также может включать в себя следующее: присвоение второго значения базовой точности второму потоку РОГ в зависимости от того были ли выполнены алгоритмы адаптации на холостом ходу и адаптации по давлению для исправления выходного сигнала датчика кислорода. Способ также может включать в себя модификацию второго базового значения точности для того, чтобы определить окончательное значение точности второго потока РОГ в зависимости от наличия потоков газов продувки и ПВК (принудительной вентиляции картера) за впускным датчиком кислорода. Способ также может включать в себя регулирование первого потока РОГ и первого значения точности первого потока РОГ на временную задержку перед определением окончательной оценки потока РОГ, причем временная задержка определяется пространственной задержкой, учитывающей объем между датчиком перепада давления и впускным датчиком кислорода. Окончательная оценка потока РОГ может также определяться допусками оценки первого потока РОГ с помощью датчика перепада давления, причем допуски оценки определяются одним или всем из нижеперечисленного: перепад давления, измеренный датчиком перепада давления и высота подъема клапана РОГ. Способ также может включать в себя выдачу окончательной оценки потока РОГ по второму потоку РОГ, ограниченному первым потоком РОГ и допусками оценивания, когда одно из второго значения точности второго потока РОГ является первым значением, второе значение точности является вторым значением, второе значение больше первого значения и возможно наличие капель воды на впускном датчике кислорода, или когда второе значение точности является третьим значением, третье значение ниже первого значения, а первое значение точности первого потока РОГ меньше второго значения. Способ также может включать в себя выдачу окончательной оценки РОГ по второму потоку РОГ, но не по первому потоку РОГ, когда второе значение точности второго потока РОГ находится на верхнем пороговом значении, и наличия капель воды на впускном датчике кислорода не ожидается. Способ также может включать в себя выдачу окончательной оценки потока РОГ по одному из первого потока РОГ или второго потока РОГ, ограниченного первым потоком РОГ, когда первое значение точности первого потока РОГ находится на верхнем пороговом значении, а второе значение второго потока РОГ является вторым значением, причем второе значение меньше верхнего порогового значения.
Таким образом, способ может включать в себя: оценивание первого потока РОГ (рециркуляции отработавших газов) с помощью датчика перепада давления между входом и выходом клапана РОГ, и оценивание второго потока РОГ с помощью впускного датчика кислорода, присвоение первого значения точности первому потоку РОГ и присвоение второго значения точности второму потоку РОГ, исходя из условий работы двигателя и состояния датчика, и регулирование клапана РОГ по окончательной оценке потока РОГ, причем окончательная оценка РОГ определяется первым потоком РОГ, вторым потоком РОГ, первым значением точности и вторым значением точности. Первое значение точности может уменьшаться, когда перепад давления, измеренный датчиком перепада давления, меньше своего порогового значения, в процессе события помпажа компрессора, когда открывается перепускной клапан компрессора и когда установлен флаг, указывающий на неисправность датчика перепада давления. Второе значение точности может уменьшаться, когда не были выполнены адаптационные алгоритмы, предназначенные для исправления выходного сигнала впускного датчика кислорода, при увеличении потока продувки на впускной датчик кислорода и при увеличении потока ПВК (принудительной вентиляции картера) на впускной датчик кислорода. Способ также может включать в себя определение допусков первого потока РОГ, причем допуски определяются перепадом давления, измеренным датчиком перепада давления и высотой подъема клапана РОГ. Способ может также включать в себя комбинирование первого потока и второго потока РОГ в окончательной оценке потока РОГ, причем комбинирование определяется первым значением точности, вторым значением точности и допусками оценивания. При выполнении одного или более из следующих условий: или второе значение точности меньше первого значения и второе значение точности является первым значением, и существует вероятность наличия на датчике кислорода капель воды, способ также может включать в себя ограничение второго потока РОГ границами допусков первого потока РОГ и выдачу окончательной оценки потока РОГ по ограниченному второму потоку РОГ. Когда второе значение точности является первым значением, и невозможно наличие капель воды на впускном датчике кислорода, способ может также включать в себя окончательную оценку потока РОГ, так, чтобы она была вторым потоком РОГ, а не первым потоком РОГ.
Таким образом, система может содержать турбонагнетатель с впускным компрессором и выпускной турбиной, канал рециркуляции отработавших газов низкого давления, связывающий выпускной канал ниже по потоку от выпускной турбины и впускной канал выше по потоку от впускного компрессора, причем канал РОГ низкого давления содержит клапан РОГ и датчик перепада давления (ПД) для измерения потока РОГ, впускной датчик кислорода, расположенный на впуске двигателя ниже по потоку от канала РОГ низкого давления, и контроллер с машиночитаемыми инструкциями для выдачи окончательной оценки РОГ по первой оценке потока РОГ, основанной на выходном сигнале датчика ПД, второй оценке потока РОГ, основанной на выходном сигнале впускного датчика кислорода, по первому значению точности первой оценки потока РОГ и второму значению второй оценки потока РОГ. Первое значение точности может быть целочисленным значением, определяемым одним или более из следующего: помпаж компрессора, положение перепускного клапана компрессора и выходной сигнал перепада давления от датчика перепада давления. Второе значение точности может быть целочисленным значением, определяемым одним или более из следующего: наличие неисправности датчика, выполнение алгоритмов адаптации на холостом ходу и адаптации по давлению для исправления выходного сигнала датчика кислорода, количество потока продувки за впускной датчик кислорода и количество потока принудительной вентиляции картера за датчик кислорода.
Таким образом, способ может включать в себя оценивание доли газов РОГ во впускной системе двигателя по выходным сигналам и от впускного датчика кислорода и от системы ПДНК (перепада давления на клапане), содержащей датчик перепада давления (ПД). И датчик ПД, и датчик кислорода могут использоваться для выдачи индивидуальных оценок доли РОГ во впускном воздухе впускной системы. В зависимости от условий работы двигателя можно оценить точность выходных сигналов каждого из датчиков. Точность выходных сигналов датчика кислорода может определяться тем, был ли выполнен один или оба из следующих алгоритмов: адаптации на холостом ходу и адаптации по давлению, и тем протекают или не протекают за датчик кислорода газы продувки и/или принудительной вентиляции картера. Точность датчика ПД можно определить по тому, не активен ли помпаж, не открыт или не открывается ли перепускной клапан компрессора, и по перепаду давления между входом и выходом клапана РОГ. Выходные сигналы, отражающие потоки продувки и ПВК, а также сигналы от датчика ПД можно совместить по времени в месте расположения датчика кислорода для учета того времени, которое потребуется газам, чтобы пройти от окна ПВК, окна продувки и системы ПДНК до датчика кислорода, расположенного от них ниже по потоку. Эти выходные сигналы могут быть пропущены через фильтр, для того, чтобы представлять аксиальную диффузию, и модифицированы компаратором с использованием калибруемых порогов для получения окончательных целочисленных значений состояния, что может потребоваться правилами вынесения решения, а также для того, чтобы уменьшить завышение оценок точностей датчиков.
В зависимости от точности датчиков ПД и кислорода, долю газов РОГ во впускном воздухе можно оценить по-разному. Каждому из датчика кислорода и датчика ПД может быть присвоено значение точности от 0 до 3. Если точность или датчика кислорода, или датчика ПД окажется 0, то контроллер может не выдавать оценки РОГ. Если точность датчика кислорода будет равна 1, а точность датчика ПД будет равна 3, тогда для выдачи окончательной оценки доли РОГ контроллер может взять исключительно оценку доли РОГ по показаниям датчика ПД. Если точность датчика кислорода будет равна 1, а точность датчика ПД будет равна 1 или 2, или если точность датчика кислорода окажется равной 2, а точность датчика ПД превысит О, тогда контроллер может ограничить оценку доли РОГ по показаниям датчика кислорода границами допусков датчика ПД. Если точность датчика кислорода будет равна 3, а точность датчика ПД будет большей 0, тогда контроллер для выдачи окончательной оценки доли газов РОГ во впускном воздухе может взять оценку доли РОГ по показаниям датчика кислорода. То есть, в определенных условиях работы двигателя, исключительно датчик кислорода может быть использован для оценки доли РОГ. В других условиях работы двигателя, для оценки доли РОГ может быть использован только датчик ПД. В других возможных условиях работы двигателя в окончательную оценку доли РОГ могут быть включены и выходной сигнал от датчика кислорода, и выходной сигнал от датчика ПД.
Таким образом достигается технический эффект определения более точной оценки потока РОГ по выходным сигналам и датчика кислорода и датчика перепада давления. Результатом этого может быть более точное управление потоком РОГ посредством клапана РОГ. Определяя точность выходных сигналов обоих датчиков по условиям работы двигателя, можно получить более точную оценку потока РОГ за счет использования выходных сигналов от более точного датчика для оценивания потока РОГ. Дополнительно, в некоторых условиях, когда точности датчиков могут быть одинаковыми или аналогичными, для обеспечения более точной оценки потока РОГ во впускной системе можно комбинировать выходные сигналы обоих датчиков. Тем самым не только может быть повышена общая точность потока РОГ, но и точность оценки потока РОГ можно будет выдерживать в более широком диапазоне условий работы двигателя.
В другом представлении способ включает в себя: оценивание первого потока РОГ (рециркуляции отработавших газов) датчиком перепада давления на клапане РОГ и второго потока РОГ впускным датчиком кислорода в течение существования первого условия, регулирование РОГ по оценке первого потока РОГ и не второго потока РОГ, в течение второго условия, регулирование РОГ по второй оценке потока РОГ и не по первой оценке РОГ, а в течение существования третьего условия, комбинирование первой оценки потока РОГ и второй оценки потока РОГ в одну оценку РОГ и регулирование РОГ по комбинированной оценке РОГ.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут реализовываться системой управления, включающей в себя контроллер, в комбинации с разнообразными датчиками, исполнительными устройствами и прочей аппаратной частью двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Что подразумевает, что проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия операции и/или функции могут графически изображать код, программируемый в запоминающем устройстве машиночитаемой компьютерной среды хранения в системе управления двигателем, в которой указанные действия реализуются путем исполнения инструкций в системе, содержащей разнообразные аппаратные компоненты в комбинации с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и алгоритмы по своей сути являются лишь примерами, и что конкретные варианты осуществления не несут ограничительной функции, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные сочетания и производные сочетания различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, внимание сосредоточено на определенных сочетаниях компонентов и производных сочетаниях компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты включают в себя один или более указанных элементов, не требуя, и не исключая двух или более таких элементов. Иные сочетания и производные сочетания раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем поправки имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи исходной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ (ВАРИАНТЫ) УПРАВЛЕНИЯ КЛАПАНОМ РЕЦИРКУЛЯЦИИ ОТРАБОТАВШИХ ГАЗОВ РАЗНОСТИ ТЕМПЕРАТУР КЛАПАНА | 2016 |
|
RU2702950C2 |
| СИСТЕМА И СПОСОБ (ВАРИАНТЫ) ДИАГНОСТИКИ НАРАСТАНИЯ САЖИ НА КЛАПАНЕ РЕЦИРКУЛЯЦИИ ОТРАБОТАВШИХ ГАЗОВ | 2016 |
|
RU2702715C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДИАГНОСТИКИ ДАТЧИКА СОДЕРЖАНИЯ КИСЛОРОДА В ПРИТОЧНОМ ВОЗДУХЕ ПО ДАВЛЕНИЮ | 2015 |
|
RU2710328C2 |
| Способ разомкнутого и замкнутого управления системой рециркуляции отработавших газов (варианты) | 2016 |
|
RU2719200C2 |
| Аппарат для испытаний двигателей (варианты) | 2016 |
|
RU2713811C2 |
| СПОСОБ И СИСТЕМА СНИЖЕНИЯ СТЕПЕНИ РАЗЖИЖЕНИЯ МАСЛА В ДВИГАТЕЛЕ С НАДДУВОМ (ВАРИАНТЫ) | 2015 |
|
RU2701246C2 |
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) ДЛЯ ДВИГАТЕЛЯ | 2015 |
|
RU2709240C2 |
| Способ и система для определения состава антидетонационной жидкости | 2016 |
|
RU2719186C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ОТКРЫТИЯ ЗАСЛОНКИ РЕШЕТКИ РАДИАТОРА, СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ РЕГУЛИРОВАНИЯ ПОТОКА ВОЗДУХА В ПЕРЕДНЕЙ ЧАСТИ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2015 |
|
RU2710637C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА КОНДЕНСАТА В ОХЛАДИТЕЛЕ ВОЗДУХА НАДДУВА С ИСПОЛЬЗОВАНИЕМ ДАТЧИКА КИСЛОРОДА НА ВПУСКЕ ХОЛОДНОГО ВОЗДУХА | 2014 |
|
RU2573727C1 |


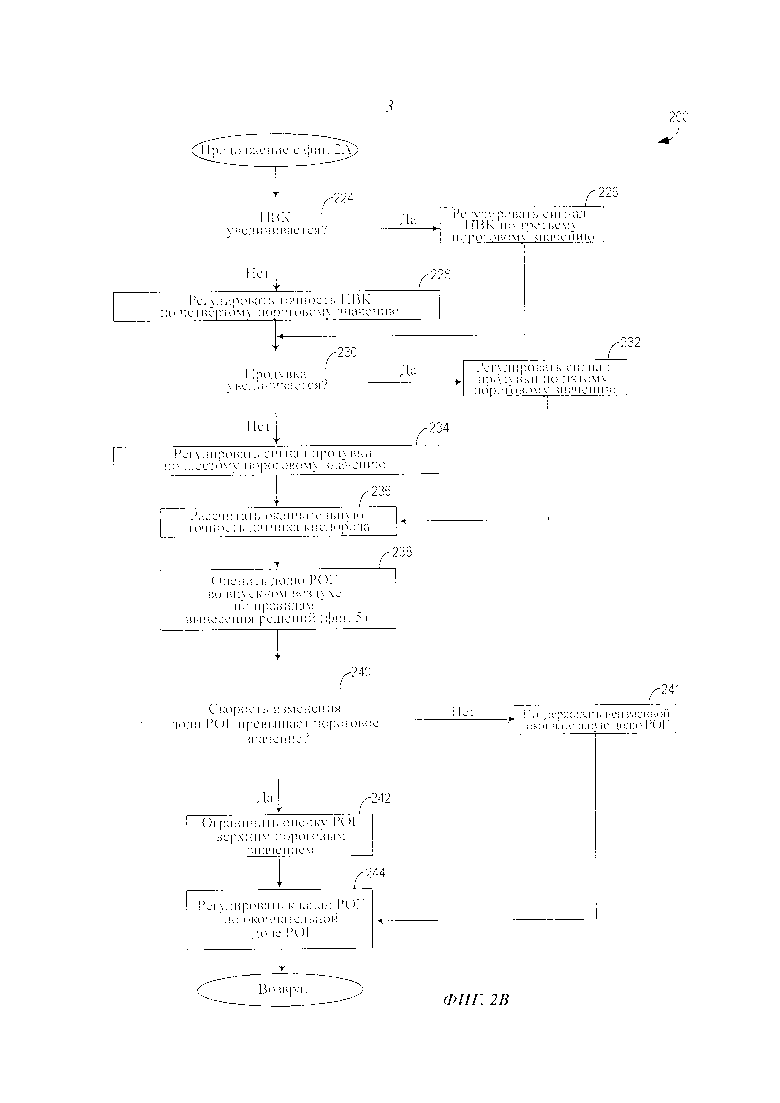

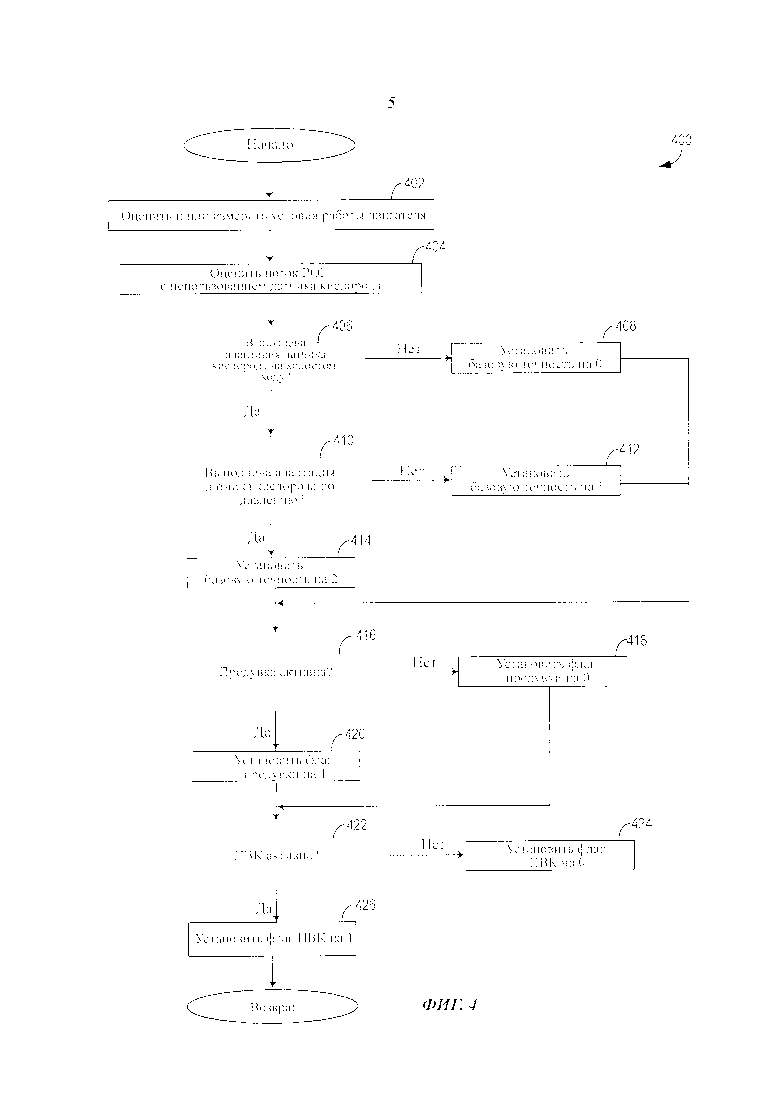

Изобретение может быть использовано в двигателях внутреннего сгорания, снабженных системой рециркуляции отработавших газов. Способ для двигателя (10) заключается в том, что регулируют работу двигателя на основании окончательной оценки параметра газового потока. Окончательная оценка параметра газового потока зависит как от первого параметра газового потока, оцененного первым датчиком, так и от второго параметра газового потока, оцененного вторым датчиком, расположенным на расстоянии от первого датчика в газовом канале двигателя (10). Окончательная оценка параметра газового потока также зависит от значений точности первого и второго параметров газового потока, в котором окончательной оценкой параметра газового потока является окончательная оценка потока рециркуляции отработавших газов (РОГ). Регулирование работы двигателя (10) включает в себя регулирование клапана (121) РОГ по окончательной оценке потока РОГ. Окончательная оценка потока РОГ определяется как первым потоком РОГ, оцененным датчиком (125) перепада давления между входом и выходом клапана (121) РОГ, так и вторым потоком РОГ, оцененным впускным датчиком (168) кислорода. Окончательная оценка потока РОГ также определяется значениями точности как первого, так и второго потоков РОГ. Раскрыты способ для двигателя и система двигателя. Технический результат заключается в повышении точности определения потока РОГ. 3 н. и 16 з.п. ф-лы, 6 ил.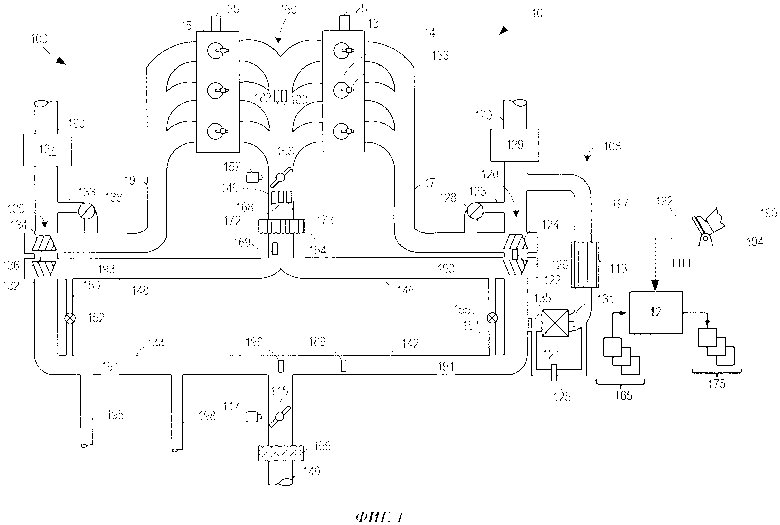
1. Способ для двигателя, содержащий шаги:
регулируют работу двигателя на основании окончательной оценки параметра газового потока, причем окончательная оценка параметра газового потока зависит как от первого параметра газового потока, оцененного первым датчиком, так и от второго параметра газового потока, оцененного вторым датчиком, расположенным на расстоянии от первого датчика в газовом канале двигателя, и также зависит от значений точности первого и второго параметров газового потока, в котором окончательной оценкой параметра газового потока является окончательная оценка потока рециркуляции отработавших газов (РОГ), причем регулирование работы двигателя включает в себя регулирование клапана РОГ по окончательной оценке потока РОГ, а окончательная оценка потока РОГ определяется как первым потоком РОГ, оцененным датчиком перепада давления между входом и выходом клапана РОГ, так и вторым потоком РОГ, оцененным впускным датчиком кислорода, и также определяется значениями точности как первого, так и второго потоков РОГ.
2. Способ по п. 1, в котором окончательная оценка потока РОГ дополнительно основана на допусках оценки первого потока РОГ с помощью датчика перепада давления, причем допуски оценки основаны на одной или нескольких из нижеперечисленных характеристик: перепад давления, измеренный датчиком перепада давления, и высота подъема клапана РОГ.
3. Способ по п. 1, в котором значения точности определяются условиями работы двигателя во время оценки первого потока РОГ и второго потока РОГ, причем значения точности являются целочисленными значениями от нуля до трех.
4. Способ по п. 1, дополнительно содержащий: присвоение первого значения точности первому потоку РОГ, исходя из всего из нижеперечисленного: помпаж компрессора, положение перепускного клапана компрессора и выходной сигнал перепада давления от датчика перепада давления.
5. Способ по п. 1, дополнительно содержащий: присвоение второго значения базовой точности второму потоку РОГ в зависимости от того, были ли выполнены алгоритмы адаптации на холостом ходу и адаптации по давлению для исправления выходного сигнала впускного датчика кислорода.
6. Способ по п. 5, дополнительно содержащий модификацию второго базового значения точности для того, чтобы определить окончательное второе значение точности второго потока РОГ в зависимости от потоков газов продувки и принудительной вентиляции картера (ПВК) за впускным датчиком кислорода.
7. Способ по п. 1, дополнительно содержащий регулирование первого потока РОГ и первого значения точности первого потока РОГ на временную задержку перед определением окончательной оценки потока РОГ, причем временная задержка определяется пространственной задержкой, учитывающей расход потока и объем между датчиком перепада давления и впускным датчиком кислорода.
8. Способ по п. 2, дополнительно содержащий определение окончательной оценки потока РОГ на основании второго потока РОГ, ограниченного первым потоком РОГ и допусками оценивания, когда одно из второго значения точности второго потока РОГ является первым значением, второе значение точности является вторым значением, второе значение больше первого значения и возможно наличие капель воды на впускном датчике кислорода, или когда второе значение точности является третьим значением, третье значение ниже первого значения, а первое значение точности первого потока РОГ меньше второго значения.
9. Способ по п. 1, дополнительно содержащий выдачу окончательной оценки РОГ на основании второго потока РОГ, но не на основании первого потока РОГ, когда второе значение точности второго потока РОГ находится на верхнем пороговом значении, и наличия капель воды на впускном датчике кислорода не ожидается.
10. Способ по п. 1, дополнительно содержащий определение окончательной оценки потока РОГ по одному из первого потока РОГ или второго потока РОГ, ограниченного первым потоком РОГ, когда первое значение точности первого потока РОГ находится на верхнем пороговом значении, а второе значение точности второго потока РОГ является вторым значением, причем второе значение меньше верхнего порогового значения.
11. Способ для двигателя, содержащий шаги:
оценивают первый поток рециркуляции отработавших газов (РОГ) с помощью датчика перепада давления между входом и выходом клапана РОГ и оценивают второй поток РОГ с помощью впускного датчика кислорода;
присваивают первое значение точности первому потоку РОГ и присваивают второе значение точности второму потоку РОГ, исходя из условий работы двигателя и состояния датчика; и
регулируют клапан РОГ на основании окончательной оценки потока РОГ, причем окончательная оценка РОГ определяется первым потоком РОГ, вторым потоком РОГ, первым значением точности и вторым значением точности.
12. Способ по п. 11, причем первое значение точности уменьшается, когда перепад давления, измеренный датчиком перепада давления, меньше своего порогового значения, в процессе события помпажа компрессора, когда открывается перепускной клапан компрессора и когда установлен флаг, указывающий на неисправность датчика перепада давления.
13. Способ по п. 11, причем второе значение точности уменьшается, когда не были выполнены адаптационные алгоритмы, предназначенные для исправления выходного сигнала впускного датчика кислорода, при увеличении потока продувки на впускной датчик кислорода и при увеличении потока принудительной вентиляции картера (ПВК) на впускной датчик кислорода.
14. Способ по п. 11, дополнительно содержащий определение допусков первого потока РОГ, причем допуски определяются перепадом давления, измеренным датчиком перепада давления и высотой подъема клапана РОГ.
15. Способ по п. 14, дополнительно содержащий комбинирование первого потока и второго потока РОГ в окончательную оценку потока РОГ, причем комбинирование выполняют на основании первого значения точности, второго значения точности и допусков оценивания.
16. Способ по п. 11, дополнительно содержащий при выполнении одного или более из следующих условий: или второе значение точности меньше первого значения и второе значение точности является первым значением, и существует вероятность наличия на впускном датчике кислорода капель воды, ограничение второго потока РОГ допусками первого потока РОГ и определение окончательной оценки потока РОГ по ограниченному второму потоку РОГ, и дополнительно содержащий, когда второе значение точности является первым значением, и невозможно наличие капель воды на впускном датчике кислорода, определение окончательной оценки потока РОГ так, чтобы она была вторым потоком РОГ, а не первым потоком РОГ.
17. Система двигателя, содержащая:
турбонагнетатель с впускным компрессором и выпускной турбиной;
канал рециркуляции отработавших газов низкого давления, связывающий выпускной канал ниже по потоку от выпускной турбины и впускной канал выше по потоку от впускного компрессора, причем канал РОГ низкого давления содержит клапан РОГ и датчик перепада давления (ПД) для измерения потока РОГ;
впускной датчик кислорода, расположенный на впуске двигателя ниже по потоку от канала РОГ низкого давления; и
контроллер с машиночитаемыми инструкциями для:
определения окончательной оценки потока РОГ на основании первой оценки потока РОГ, основанной на выходном сигнале датчика ПД, второй оценке потока РОГ, основанной на выходном сигнале впускного датчика кислорода, на первом значении точности первой оценки потока РОГ и втором значении точности второй оценки потока РОГ.
18. Система по п. 17, в которой первое значение точности является целочисленным значением, определяемым одним или несколькими из следующих параметров: помпаж компрессора, положение перепускного клапана компрессора и выходной сигнал перепада давления от датчика перепада давления.
19. Система по п. 17, в которой второе значение точности является целочисленным значением, определяемым одним или несколькими из следующих условий: был ли выполнен алгоритм адаптации на холостом ходу и адаптации по давлению для исправления выходного сигнала впускного датчика кислорода, величина потока продувки за впускным датчиком кислорода и величина потока принудительной вентиляции картера за впускным датчиком кислорода.
| US 6446498 B1, 10.09.2002 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| RU 2011133295 A, 20.02.2013 | |||
| US 6742379 B2, 01.06.2004 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

