Изобретение относится к области микросистемной техники, в частности, к приборам для измерения линейного ускорения.
Известен двухосевой микромеханический акселерометр [ООО «Сотест АТЕ», https://sovtest-ate.com/equipment/dvukhosevoy-vysokotochnyy-mems-_-akselerometr-_-30g/], выполненный по технологии глубокого реактивного травления. Измерение двух составляющих ускорения осуществляется за счёт установки в корпусе двух одинаковых одноосных акселерометров с ортогональными измерительными осями. Каждый акселерометр содержит гребенчатую инерционную массу, установленную в корпусе на упругом подвесе с возможностью её перемещения внутри другой неподвижной гребёнки. Изменение ёмкости между «пальцами» гребёнок пропорционально линейному ускорению.
Недостатком данного акселерометра является выполнение устройства состоящим из двух однокомпонентных акселерометров, что увеличивает габариты акселерометра и требует обеспечения ортогональности их измерительных осей в корпусе с целью уменьшения чувствительности к перекрёстным ускорениям по ортогональным осям.
Из патента на изобретение CN №100567993 [МПК G01 P15/097, приоритет от 2006-10-11] известен двухосевой микромеханический резонанcный акселерометр, который содержит подложку, инерционную массу, упругие элементы, образующие подвес для осуществления развязки в двух ортогональных направлениях для улучшения чувствительности и разрешения в указанных двух направлениях, а также рычажное усилительное устройство, звуковую вилку, приводной электрод, детектирующий электрод.
Из патентной заявки CN №106597011 [МПК G01P15/02, приоритет от 2017-04-26] известен двухосевой микромеханический резонанcный акселерометр (прототип).
Конструкция двухосевого микромеханического резонаторного акселерометра состоит из анкерных блоков, размещенных с четырех сторон от расположенного с зазором над подложкой квадрата центральной инерционной массы и связанных с ней через Ω-образные упругие элементы, образующие подвес для осуществления развязки в двух ортогональных направлениях с целью улучшения чувствительности устройства и увеличения разрешения в указанных двух направлениях.
Общими недостатками конструкции этих акселерометров являются невысокие чувствительность и быстродействие, что является следствием использования частотно-резонансного принципа определения измеряемого ускорения, так как для измерения малых линейных ускорений требуется длительное время измерения изменения резонансной частоты. Для повышения точности необходимо увеличивать время измерения, что снижает быстродействие, при повышении быстродействия уменьшается точность измерения.
Технической проблемой, которую решает данное изобретение, является повышение быстродействия и точности двухосевого измерения ускорения, а также расширение арсенала технических средств, позволяющих измерять ускорение объекта в двух взаимно перпендикулярных направлениях.
Технический результат достигается тем что, в двухосевом микромеханическом акселерометре, содержащем анкерные блоки, неподвижно закрепленные на подложке, инерционную массу, расположенную с зазором относительно подложки, Ω-образные упругие элементы, образующие подвес, инерционная масса выполнена в виде рамки, к четырем вешним сторонам которой одним концом закреплены восемь Ω-образных упругих элементов, по два с каждой стороны, четыре из которых , закрепленные к концам двух противоположных сторон рамки, своими вторыми концами закреплены к анкерным блокам, а четыре других Ω-образных упругих элемента, закрепленные к концам двух других противоположных сторон рамки, своими вторыми концами закреплены изнутри к двум противоположным сторонам промежуточной рамки, которая в свою очередь посредством четырёх Ω-образных упругих элементов закреплена в наружной рамке, также закреплённой с её внешней стороны с помощью Ω-образных упругих элементов на анкерных блоках, при этом наружная рамка и внутренняя рамка инерционной массы снабжены гребенчатыми электродами, образующими плоские конденсаторы в паре с неподвижными гребенчатыми электродами, расположенными на подложке снаружи и внутри этих рамок соответственно.
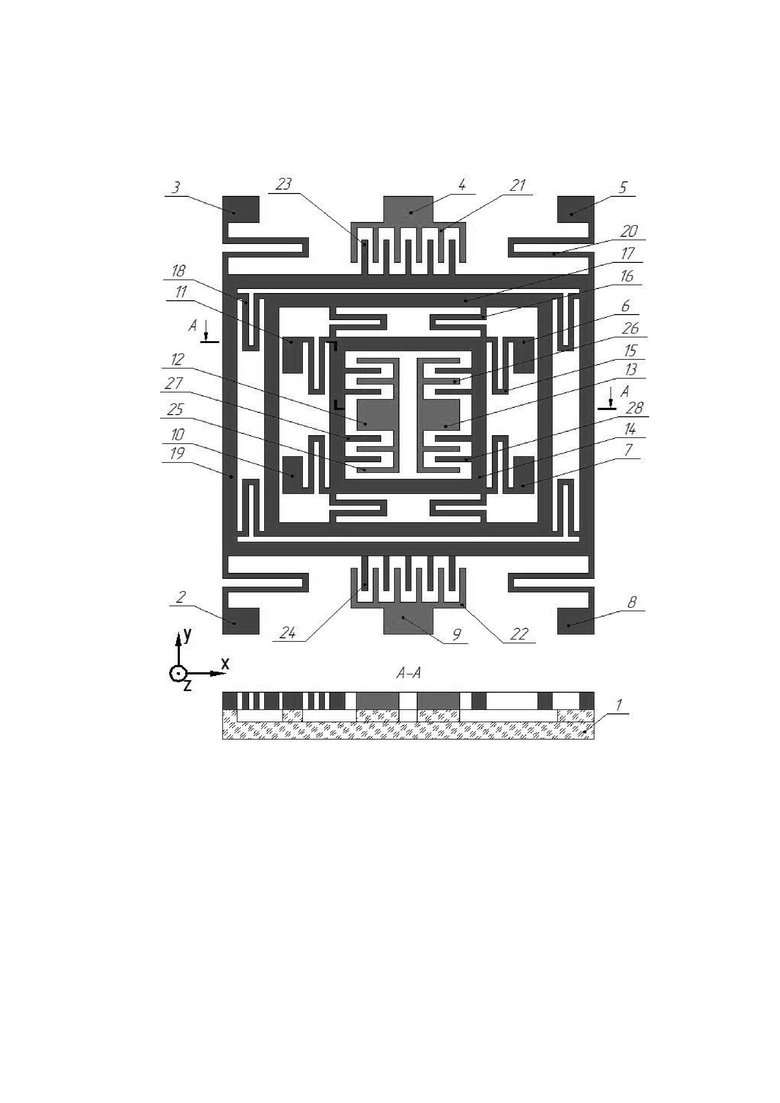
Изобретение поясняется чертежом, на котором изображена принципиальная схема двухосевого микромеханического акселерометра.
Двухосевой микромеханический акселерометр содержит подложку 1, выполненную из диэлектрического материала, анкерные блоки 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, неподвижно закрепленные на подложке, инерционную массу 14, расположенную с зазором относительно подложки и выполненную в виде рамки, четыре Ω-образных упругих элемента 15, закрепленные с одной стороны к инерционной массе, с другой стороны к анкерным блокам 6, 7, 10, 11. Инерционная масса 14 соединена Ω-образными упругими элементами 16 с промежуточной рамкой 17, которая посредством четырёх Ω-образных упругих элементов 18 установлена с зазором в наружной рамке 19, закреплённой с зазором относительно подложки.
Четыре Ω-образных упругих элемента 20, с одной стороны закрепленные к наружной рамке 19, с другой стороны к анкерным блокам 2, 3, 5, 7, обеспечивают возможность перемещения наружной рамки вдоль оси Y. Ω-образные упругие элементы 15 размещены в микромеханическом акселерометре с возможностью перемещения инерционной массы 14 вдоль оси Х. Ω-образные упругие элементы 16 размещены в микромеханическом акселерометре с возможностью совершения линейных перемещений промежуточной рамки 14 вдоль оси Y, Ω-образные упругие элементы 18 обеспечивают возможность совершения линейных перемещений промежуточной рамки 14 вдоль оси Х.
На анкерных блоках 4 и 9 с противоположных сторон закреплены неподвижные электроды 21, 22, образующие с подвижными гребенчатыми электродами 23, 24, закреплёнными на наружной рамке 19, плоские конденсаторы, которые являются емкостными датчиками, измеряющими ускорение вдоль оси Y. На опорных элементах 12, 13 закреплены неподвижные электроды 25, 26, образующие с подвижными гребенчатыми электродами 27, 28, закреплёнными на инерционной массе 14, плоские конденсаторы, которые являются емкостными датчиками, измеряющими ускорение вдоль оси Х.
Устройство работает следующим образом.
При наличии линейного ускорения вдоль оси Y, вследствие действия инерционных сил, возникающих под действием ускорения, наружная рамка 19 совместно с промежуточной рамкой 17 перемещается вдоль оси Y, так как жёсткость упругих элементов 18 вдоль осей Z, Y намного больше их жёсткости вдоль оси X и жёсткость упругих элементов 16 вдоль оси Y намного меньше их жёсткости вдоль осей Z и X. Инерционная масса 14 при этом остаётся неподвижной.
Съем сигнала о действующем ускорении вдоль оси Y осуществляется с использованием ёмкостных гребенчатых электродов 21-22 и 22-24, так как перемещение наружной рамки вызывает изменение емкостей плоских конденсаторов, образованных этими электродами.
При наличии линейного ускорения вдоль оси Х инерционная масса 14 вместе с промежуточной рамкой 17 совершает движение относительно подложки только вдоль оси Х, так как жёсткость упругих элементов 15 по оси Х много меньше их жёсткости по другим осям, в то время как жёсткость упругих элементов 16 вдоль оси X намного больше их жёсткости вдоль осей Z и Y. Наружная рамка при этом остаётся неподвижной.
Съем сигнала о действующем ускорении вдоль оси Х осуществляется с использованием ёмкостных гребенчатых электродов 26-28 и 25-27, так как перемещение инерционного тела вызывает изменение емкостей плоских конденсаторов, образованных этими электродами.
Промежуточная рамка 17 выполняет функции развязывающей рамки, которая устраняет перекрёстное влияние ускорений по ортогональным осям Х и Y на съём информации датчиками, измеряющими перемещения инерционного тела 14 вдоль оси Х и наружной рамки 19 вдоль оси Y. В результате наличия промежуточной рамки акселерометр разделяет измеряемое ускорение на два независимых ортогональных направления. При наличии ускорения вдоль оси Y, перемещение инерционной массы 14 по этой оси относительно мало с учетом промежуточной рамки. Подобным образом, при ускорении вдоль оси Х, смещение наружной рамки по этой оси относительно мало. Конструкция подвеса промежуточной рамки уменьшает помехи между ортогональными направлениями X, Y.
Таким образом, предлагаемое устройство представляет собой двухосевой микромеханический акселерометр, позволяющий одновременно измерять величины линейных ускорений вдоль осей X и Y, расположенных ортогонально в плоскости диэлектрической подложки и расширяет арсенал технических средств, позволяющих измерять ускорение объекта в двух взаимно перпендикулярных направлениях. Ортогональность измерительных осей обеспечивается технологически при изготовлении. Использование гребенчатых электродов для съёма информации о перемещениях увеличивает чувствительность и быстродействие акселерометра, так как изменение емкостей между гребенчатыми электродами, которые несут в себе информацию об измеряемых ускорениях, происходит безынерционно по отношению к перемещениям наружной рамки и инерционного тела под действием ускорений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЁХОСЕВОЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2018 |
|
RU2693010C1 |
| Двухосевой микромеханический акселерометр с емкостным преобразователем перемещений | 2023 |
|
RU2810694C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2011 |
|
RU2477863C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351897C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2011 |
|
RU2455652C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2016 |
|
RU2649249C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351896C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2015 |
|
RU2597953C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2005 |
|
RU2296390C1 |
| Интегральный микромеханический гироскоп-акселерометр | 2018 |
|
RU2683810C1 |
Изобретение относится к области микросистемной техники, в частности к приборам для измерения линейного ускорения. Акселерометр содержит подложку из диэлектрического материала, анкерные блоки, неподвижно закрепленные на подложке, инерционную массу, Ω-образные упругие элементы, образующие подвес для осуществления развязки в двух ортогональных направлениях, наружную раму, внутри которой на Ω-образных упругих элементах подвеса закреплена промежуточная рамка, имеющая упругую связь с инерционной массой. Наружная рамка и инерционная масса снабжены гребенчатыми электродами, неподвижные части которых связаны с подложкой, подвижные электроды образуют единое целое с наружной рамкой и инерционной массой. Технический результат – повышение быстродействия и точности измерения ускорения, расширение арсенала технических средств, позволяющих измерять ускорение объекта в двух взаимно перпендикулярных направлениях. 1 ил.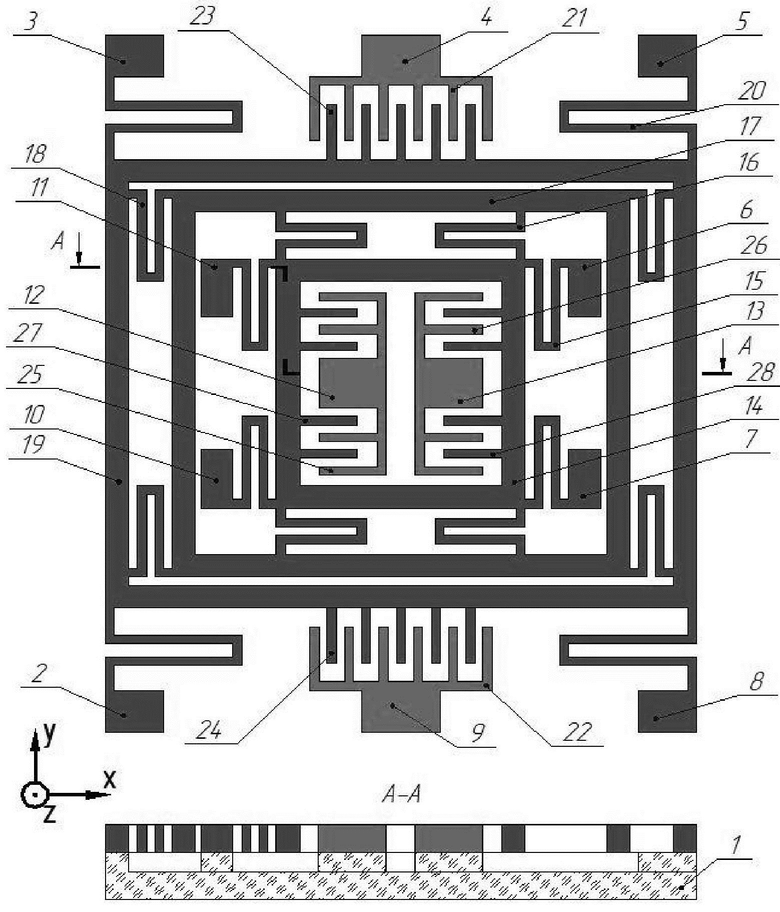
Двухосевой микромеханический акселерометр, содержащий подложку, анкерные блоки, неподвижно закрепленные на подложке, инерционную массу, расположенную с зазором относительно подложки, Ω-образные упругие элементы, образующие подвес, отличающийся тем, что инерционная масса выполнена в виде рамки, к четырем внешним сторонам которой одним концом закреплены восемь Ω-образных упругих элемента, по два с каждой стороны, четыре из которых, закрепленные к концам двух противоположных сторон рамки, своими вторыми концами закреплены к анкерным блокам, а четыре других Ω-образных упругих элемента, закрепленные к концам двух других противоположных сторон рамки, своими вторыми концами закреплены изнутри к двум противоположным сторонам промежуточной рамки, которая, в свою очередь, посредством четырёх Ω-образных упругих элементов закреплена в наружной рамке, также закреплённой с её внешней стороны с помощью Ω-образных упругих элементов на анкерных блоках, при этом наружная рамка и внутренняя рамка инерционной массы снабжены гребенчатыми электродами, образующими плоские конденсаторы в паре с неподвижными гребенчатыми электродами, расположенными на подложке снаружи и внутри этих рамок соответственно.
| CN 106597011 A, 26.04.2017 | |||
| CN 106597016 A, 26.04.2017 | |||
| МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543686C1 |
| Устройство для записи функциональной зависимости | 1960 |
|
SU133617A1 |

