Изобретение относится к области микросистемной техники, в частности, к приборам для измерения линейного ускорения и может быть использовано для одновременного измерения линейного ускорений вдоль трех взаимно перпендикулярных осей.
Известен микромеханический акселерометр [US 6199874 B1, МПК 7 B60G17/00, опубл. 13.03.2001], в котором инерционная масса смонтирована параллельно и на некотором расстоянии от основания (корпуса) с помощью двух пар упругих элементов подвеса и анкеров. Емкостный измеритель перемещений образован гребенчатыми структурами электродов, из которых подвижные электроды образуют единую структуру с инерционной массой, а неподвижные электроды скреплены с основанием.
Недостатком конструкции этого микромеханического акселерометра является невозможность одновременного измерения ускорений вдоль трех взаимно перпендикулярных осей X, Y, Z.
Из патента RU №2543686 [МПК G01P15/097,опубл.10.03.2015] известен микромеханический акселерометр (прототип), содержащий инерционную массу, закрепленную с помощью торсионов во внутренней раме, которая закреплена во внешней раме с помощью торсионов. На инерционной массе, внутренней, наружной рамках закреплены подвижные электроды датчиков перемещения, неподвижные электроды которых закреплены на подложке.
Недостатком конструкции этого микромеханического акселерометра является его чувствительность к ускорениям по перекрёстным осям, так как подвижные электроды каждого датчика перемещаются в результате действия нескольких ортогональных составляющих ускорения.
Общими существенными признаками с заявляемым изобретением являются наличие подложки, инерционной массы, анкерных блоков, неподвижно закрепленных на подложке, рамки, расположенной с зазором относительно подложки, упругих элементов (торсионов), жёстко прикрепленных одним концом к рамке или инерционной массе, а другим концом к анкерному блоку, а также подвижных и неподвижных гребенчатых структур, образующих емкостные датчики перемещения.
Технической проблемой, которую решает данное изобретение, является уменьшение чувствительности акселерометра к ускорениям по перекрёстным осям, а также расширение арсенала технических средств, позволяющих измерять ускорение объекта в трёх взаимно перпендикулярных направлениях.
Технический результат достигается тем что, трёхосевой микромеханический акселерометр, содержащий подложку, инерционную массу, анкерные блоки, неподвижно закрепленные на подложке, раму, расположенную с зазором относительно подложки, упругие элементы, жёстко прикрепленные одним концом к раме или инерционной массе, а другим концом к анкерному блоку, а также подвижные и неподвижные гребенчатые структуры, образующие емкостные датчики перемещения, дополнительно содержит внешнюю прямоугольную раму, расположенную с зазором относительно подложки, разделенную перемычкой на два равных квадрата, и закреплённую на анкерных блоках с помощью плоских упругих элементов, прикрепленных по углам рамы к двум внешним противоположным сторонам, снабженную планарными электродами, образующими плоские конденсаторы с неподвижными планарными электродами, расположенными на подложке, внутри каждого квадрата которой расположены идентичные структуры, лежащие в плоскости рамы и повернутые на угол 90 градусов друг относительно друга, каждая из которых содержит расположенную в центре инерционную массу, промежуточную раму, соединенную с инерционной массой при помощи восьми прямоугольных упругих элементов, расположенных в углах квадрата инерционной массы попарно с каждой стороны, при этом к двум противоположным сторонам квадрата инерционной массы закреплены также по два Ω-образных упругих элемента, соединенные другим концом с неподвижными анкерными блоками, при этом промежуточная рама, в свою очередь, посредством двух пар Ω-образных упругих элементов, прикрепленных к углам двух ее сторон, параллельных сторонам инерционной массы, соединенных с Ω-образными упругими элементами, закреплена в квадрате наружной рамы, а на двух противоположных сторонах каждой инерционной массы расположены гребенчатые электроды, образующие плоские конденсаторы в паре с неподвижными гребенчатыми электродами, расположенными на подложке.
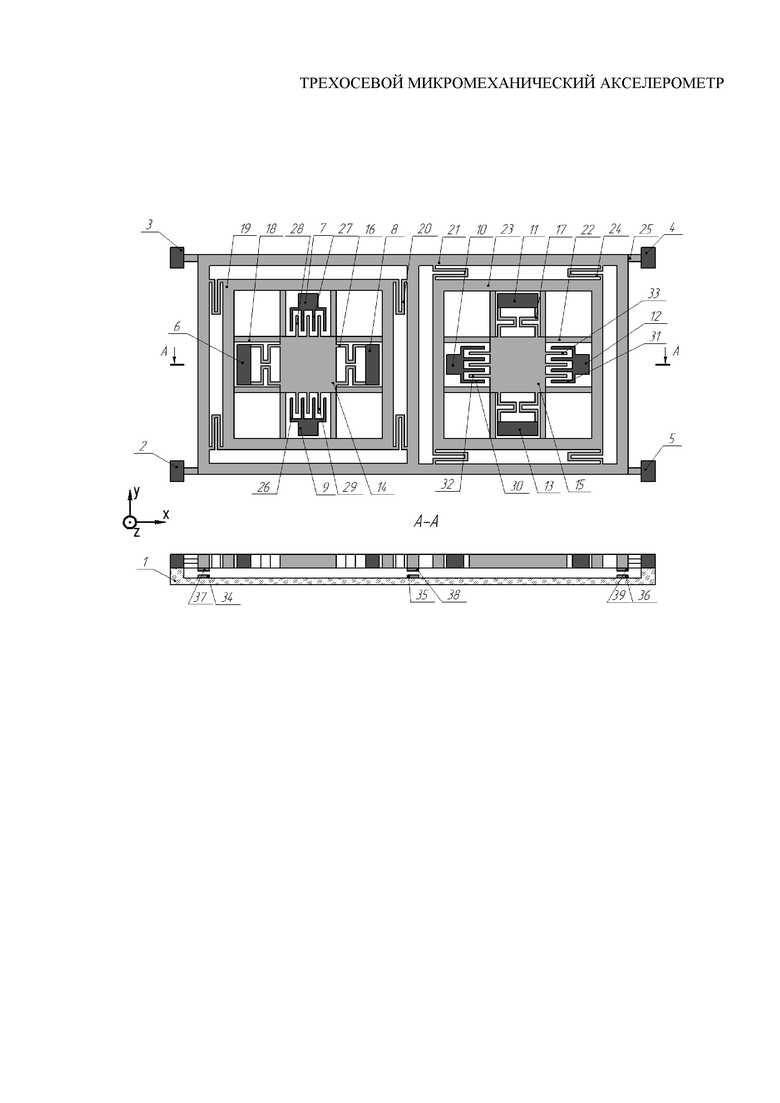
Изобретение поясняется чертежом с изображением топологии заявляемого трёхосевого микромеханического акселерометра и его сечения в плоскости А-А.
Трёхосевой микромеханический акселерометр содержит подложку 1, выполненную из диэлектрического материала, анкерные блоки 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, неподвижно закрепленные на подложке, инерционные массы 14 и 15, расположенные с зазором относительно подложки, четыре Ω-образных упругих элемента 16, закрепленные с одной стороны к инерционной массе 14, с другой стороны к анкерным блокам 6, 8 и четыре Ω-образных упругих элемента 17, закрепленные с одной стороны к инерционной массе 15, с другой стороны к анкерным блокам 11, 13. Упругие элементы 16 обеспечивают возможность перемещения инерционной массы 14 вдоль оси Х. Упругие элементы 17 обеспечивают возможность перемещения инерционной массы 15 вдоль оси Y.
Инерционная масса 14 соединена восемью плоскими упругими элементами 18 с промежуточной рамкой 19, которая посредством четырёх Ω-образных упругих элементов 20 установлена с зазором в наружной рамке 21, закреплённой с зазором относительно подложки.
Инерционная масса 15 соединена восемью плоскими упругими элементами 22 с промежуточной рамкой 23, которая посредством четырёх Ω-образных упругих элементов 24 установлена с зазором в наружной рамке 21, закреплённой с зазором относительно подложки.
Четыре плоских упругих элемента 25, с одной стороны закрепленные к наружной рамке 21, с другой стороны к анкерным блокам 2, 3, 4, 5, обеспечивают возможность перемещения наружной рамки вдоль оси Z.
На анкерных блоках 7 и 9 с противоположных сторон закреплены неподвижные электроды 26, 27, образующие с подвижными электродами 28, 29, закреплёнными на инерционной массе 14, гребенчатые конденсаторы, которые являются емкостными датчиками, измеряющими ускорение вдоль оси X. На анкерных блоках 10, 12 закреплены неподвижные электроды 30, 31, образующие с подвижными электродами 32, 33, закреплёнными на инерционной массе 15, гребенчатые конденсаторы, которые являются емкостными датчиками, измеряющими ускорение вдоль оси Y.
На подложке 1 расположены неподвижные планарные электроды 34, 35, 36 образующие с подвижными планарными электродами 37, 38, 39, закреплёнными на наружной рамке 21, плоские конденсаторы, которые являются емкостными датчиками, измеряющими ускорение вдоль оси Z.
Устройство работает следующим образом.
При наличии линейного ускорения вдоль оси Х инерционная масса 14 вместе с промежуточной рамкой 19 совершает движение относительно подложки только вдоль оси Х, так как жёсткость Ω-образных упругих элементов 16 и 20 по оси Х намного меньше их жёсткости по осям Y, Z, а также намного меньше жёсткости упругих элементов 18, 25, 17, 22, 24 по оси Х. Наружная рамка при этом остаётся неподвижной, благодаря большей жесткости упругих элементов 25 по оси Х. Съем сигнала о действующем ускорении по оси Х осуществляется с использованием ёмкостных пар гребенчатых электродов 26-29 и 27-28.
При наличии линейного ускорения вдоль оси Y вследствие действия инерционных сил, возникающих под действием ускорения, инерционная масса 15 вместе с промежуточной рамкой 23 совершает движение относительно подложки только вдоль оси Y, так как жёсткость Ω-образных упругих элементов 17 и 24 по оси Y намного меньше их жёсткости по осям Х, Z, а также намного меньше жёсткости упругих элементов 22, 25, 18, 20 по оси Y. Наружная рамка при этом остаётся неподвижной, благодаря большей жесткости элементов 25 по оси Y.
Съем сигнала о действующем ускорении по оси Y осуществляется с использованием ёмкостных пар гребенчатых электродов 30-32 и 31-33.
При наличии линейного ускорения вдоль оси Z вследствие действия инерционных сил, возникающих под действием ускорения, наружная рамка 21 совместно с промежуточными рамками 19 и 23 совершает движение вдоль оси Z, так как жёсткости упругих элементов 25, 18, 22 по оси Z намного меньше их жёсткости вдоль осей X и Y и меньше жёсткости упругих элементов 16, 17, 20, 24 вдоль оси Z. Инерционные массы 14, 15 при этом движение вдоль оси Z не совершают. Съем сигнала о действующем ускорении по оси Z осуществляется с использованием планарных электродов 35-37 и 36-38.
Промежуточные рамки 19, 23 выполняют функции развязывающих рамок и устраняют перекрёстное влияние ускорений по ортогональным осям Х, Y, Z на съём информации ёмкостными датчиками, измеряющими перемещение инерционного тела 14 вдоль оси Х, перемещение инерционного тела 15 вдоль оси Y и наружной рамки 21 вдоль оси Z во время измерения ортогональных компонентов ускорения. При наличии ускорения вдоль оси Y, перемещение инерционной массы 14 и наружной рамки 21 по этой оси относительно мало. Подобным образом, при ускорении вдоль оси Х, перемещение инерционной массы 15 и наружной рамки 21 по этой оси относительно мало. При ускорении вдоль оси Z в этом направлении перемещается только наружная и промежуточные рамки, инерционные тела 14 и 15 остаются неподвижными.
Таким образом, каждый из емкостных датчиков, электроды которого связаны либо с наружной рамкой 21, либо с инерционными телами 14, 15, измеряет перемещение своего элемента относительно неподвижной подложки только вдоль одного направления.
Заявляемый трехосевой микромеханический акселерометр, благодаря наличию промежуточных рамок, путем устранения влияния перекрёстных ускорений, обладает повышенной точностью измерения ускорения, а также расширяет арсенал технических средств, позволяющих измерять ускорение объекта в трёх взаимно перпендикулярных направлениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХОСЕВОЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2018 |
|
RU2693030C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351897C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2011 |
|
RU2455652C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2011 |
|
RU2477863C1 |
| Двухосевой микромеханический акселерометр с емкостным преобразователем перемещений | 2023 |
|
RU2810694C1 |
| МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543686C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351896C1 |
| Интегральный микромеханический гироскоп-акселерометр | 2019 |
|
RU2716869C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2016 |
|
RU2649249C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2015 |
|
RU2597953C1 |
Изобретение относится к области микросистемной техники и может быть использовано для одновременного измерения линейного ускорений вдоль трех взаимно перпендикулярных осей. Акселерометр содержит подложку, неподвижные анкерные блоки, внешнюю прямоугольную раму, расположенную с зазором относительно подложки, разделенную перемычкой на два равных квадрата и закреплённую на анкерных блоках с помощью плоских упругих элементов. Внутри каждого квадрата расположены идентичные структуры, лежащие в плоскости рамы и повернутые на угол 90 градусов относительно друг друга, каждая из которых содержит расположенную в центре инерционную массу, промежуточную раму, соединенную с массой при помощи прямоугольных упругих элементов, при этом инерционные массы соединены Ω-образными упругими элементами с анкерными блоками. Промежуточная рама посредством двух пар Ω-образных упругих элементов закреплена в квадрате наружной рамы. На двух противоположных сторонах каждой инерционной массы расположены гребенчатые электроды, образующие плоские конденсаторы в паре с неподвижными гребенчатыми электродами, расположенными на подложке. Рама снабжена планарными электродами, образующими плоские конденсаторы с неподвижными планарными электродами, расположенными на подложке. Технический результат – снижение чувствительности акселерометра к ускорениям по перекрёстным осям, расширение арсенала технических средств, позволяющих измерять ускорение объекта в трёх взаимно перпендикулярных направлениях. 1 ил.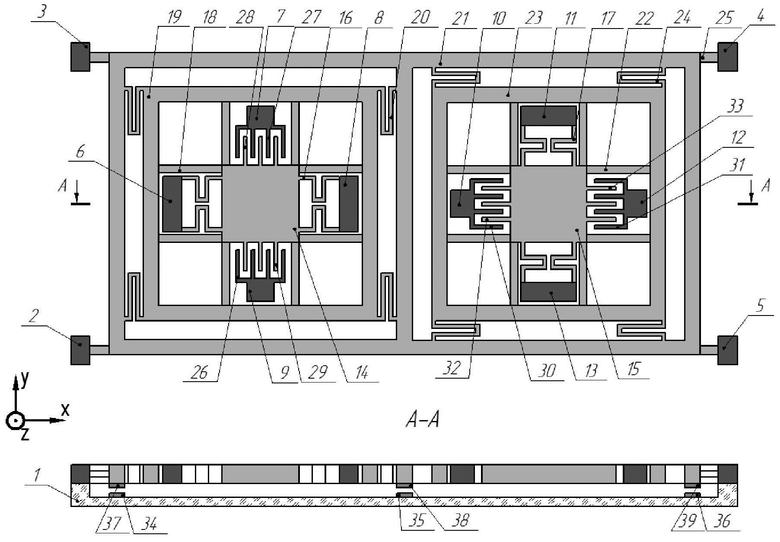
Трёхосевой микромеханический акселерометр, содержащий подложку, инерционную массу, анкерные блоки, неподвижно закрепленные на подложке, раму, расположенную с зазором относительно подложки, упругие элементы, жёстко прикрепленные одним концом к раме или инерционной массе, а другим концом к анкерному блоку, а также подвижные и неподвижные гребенчатые электроды, образующие емкостные датчики перемещения, отличающийся тем, что содержит внешнюю прямоугольную раму, расположенную с зазором относительно подложки, разделенную перемычкой на два равных квадрата и закреплённую на анкерных блоках с помощью плоских упругих элементов, прикрепленных по углам рамы к двум внешним противоположным сторонам, снабженную планарными электродами, образующими плоские конденсаторы с неподвижными планарными электродами, расположенными на подложке, внутри каждого квадрата которой расположены идентичные структуры, лежащие в плоскости рамы и повернутые под углом 90 градусов относительно друг друга, каждая из которых содержит расположенную в центре квадратную инерционную массу, промежуточную раму, соединенную с инерционной массой при помощи восьми прямоугольных упругих элементов, расположенных в углах квадрата инерционной массы попарно с каждой стороны, при этом к двум противоположным сторонам квадрата инерционной массы закреплены также по два Ω-образных упругих элемента, соединенные другим концом с неподвижными анкерными блоками, при этом промежуточная рама, в свою очередь, посредством двух пар Ω-образных упругих элементов, прикрепленных к углам двух ее сторон, параллельных сторонам инерционной массы, соединенных с Ω-образными упругими элементами, закреплена в квадрате наружной рамы, а на двух противоположных сторонах каждой инерционной массы расположены гребенчатые электроды, образующие плоские конденсаторы в паре с неподвижными гребенчатыми электродами, расположенными на подложке.
| US 2017363655 A1, 21.12.2017 | |||
| МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543686C1 |
| CN 102955046 B, 14.05.2014 | |||
| 0 |
|
SU152289A1 | |
| Трехосный электростатический акселерометр | 1984 |
|
SU1346058A3 |

