ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к формированию и применению координатных сеток транспортных средств.
УРОВЕНЬ ТЕХНИКИ
Автономные транспортные средства полагаются на распознанные свойства относительно (a) текущего транспортного средства, (b) других автономных транспортных средств, (c) других неавтономных (то есть обычных) транспортных средств и (d) обстановки. Необходимо решение для эффективного формирования сводки этих распознанных свойств и передачи сводки на автономное транспортное средство (см. US 9076341B2 и US 8253590B2).
Раскрытие изобретения
Транспортное средство включает в себя: двигатель(и), локальные датчики, процессор(ы), выполненный(е) с возможностью: формирования виртуальной карты на основании локальных датчиков и сообщения из внешнего объекта; перераспределения ресурсов обработки виртуальной карты на основании сообщения.
Согласно некоторым вариантам осуществления процессор(ы) выполнен(ы) с возможностью перераспределения ресурсов обработки виртуальной карты путём сокращения ресурсов обработки, выделенных на определенные географические зоны виртуальной карты, причём определенные географические зоны определяются на основании упомянутого сообщения.
Согласно некоторым вариантам осуществления процессор(ы) выполнен(ы) с возможностью управления двигателем(ями) на основании виртуальной карты.
Согласно некоторым вариантам осуществления процессор(ы) выполнен(ы) с возможностью выделения первых ресурсов обработки на формирование по меньшей мере части виртуальной карты по локальным датчикам и, на основании приема сообщения, выделения вторых ресурсов обработки на формирование по меньшей мере части виртуальной карты по локальным датчикам.
Согласно некоторым вариантам осуществления первые ресурсы обработки превосходят вторые ресурсы обработки.
Согласно некоторым вариантам осуществления ресурсы обработки содержат частоту формирования таким образом, что при применении первых ресурсов обработки процессор(ы) формирует(ют) по меньшей мере часть виртуальной карты с первой частотой, и при применении вторых ресурсов обработки процессор(ы) формирует(ют) по меньшей мере часть виртуальной карты со второй, более низкой частотой.
Согласно некоторым вариантам осуществления, сообщение содержит координаты зоны и правило зоны.
Согласно некоторым вариантам осуществления правило зоны является максимальным ускорением, и процессор(ы) выполнен(ы) с возможностью управления двигателями на основании максимального ускорения.
Согласно некоторым вариантам осуществления транспортное средство включает в себя рулевое управление, а правило зоны является запрещенным маневром рулевого управления, и процессор(ы) выполнен(ы) с возможностью предотвращения выполнения рулевым управлением запрещенного маневра рулевого управления, когда обнаружено, что транспортное средство находится в зоне.
Согласно некоторым вариантам осуществления процессор(ы) выполнен(ы) с возможностью: разрешения запрещённого маневра рулевого управления, когда обнаружено, что транспортное средство находится вне зоны.
Согласно некоторым вариантам осуществления сообщение содержит отмеченный блок, и при этом процессор(ы) выполнен(ы) с возможностью: обнаружения метки и, на основании обнаружения, игнорирования блока.
Согласно некоторым вариантам осуществления сообщение содержит неотмеченный блок, и при этом процессор(ы) выполнен(ы) с возможностью формирования виртуальной карты на основании неотмеченного блока.
Согласно некоторым вариантам осуществления процессор(ы) выполнен(ы) с возможностью: приёма множества сообщений из множества внешних объектов, статистического сравнения множества сообщений и идентификации выбросового сообщения на основании статистического сравнения.
Согласно некоторым вариантам осуществления процессор(ы) выполнен(ы) с возможностью: сравнения меток времени множества сообщений и выбора сообщения для статистического сравнения на основании сравнения меток времени.
Согласно некоторым вариантам осуществления процессор(ы) выполнен(ы) с возможностью: инструктирования внешнего объекта, ответственного за выбросовое сообщение, отмечать будущие сообщения.
Согласно некоторым вариантам осуществления процессор(ы) выполнен(ы) с возможностью: игнорирования отмеченных сообщений.
Согласно некоторым вариантам осуществления статистическое сравнение множества сообщений содержит статистическое сравнение только выбранных частей множества сообщений.
Согласно некоторым вариантам осуществления сообщение содержит частоту присвоения меток, и процессор(ы) выполнен(ы) с возможностью формирования виртуальной карты на основании частоты присвоения меток.
Транспортное средство включает в себя: двигатель(и), локальные датчики, процессор(ы), выполненный(е) с возможностью: формирования виртуальной карты на основании локальных датчиков; приёма множества сообщений из множества внешних объектов, статистического сравнения множества сообщений и идентификации выбросового сообщения на основании статистического сравнения; инструктирования внешнего объекта, ответственного за выбросовое сообщение, отмечать будущие сообщения; игнорирования отмеченных сообщений; формирования виртуальной карты на основании неотмеченных сообщений.
Транспортное средство включает в себя: двигатель(и), локальные датчики, процессор(ы), выполненный(е) с возможностью: формирования виртуальной карты на основании локальных датчиков; приёма множества сообщений из множества внешних объектов, статистического сравнения множества сообщений и идентификации выбросового сообщения на основании статистического сравнения; инструктирования внешнего объекта, ответственного за выбросовое сообщение, отмечать будущие сообщения; игнорирования отмеченных сообщений; формирования виртуальной карты на основании неотмеченных сообщений; перераспределения ресурсов обработки виртуальной карты на основании неотмеченных сообщений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания изобретения можно обратиться к вариантам осуществления, показанным на нижеследующих чертежах. Компоненты на чертежах не обязательно показаны в масштабе, и связанные элементы могут быть пропущены или, в некоторых случаях, могут быть преувеличены пропорции, чтобы подчеркнуть и ясно проиллюстрировать новые признаки, описанные в материалах настоящей заявки. Кроме того, компоненты системы могут быть скомпонованы по-разному, как известно в данной области техники. Кроме того, на чертежах одинаковые номера ссылочных позиций обозначают соответствующие части среди всех из нескольких видов.
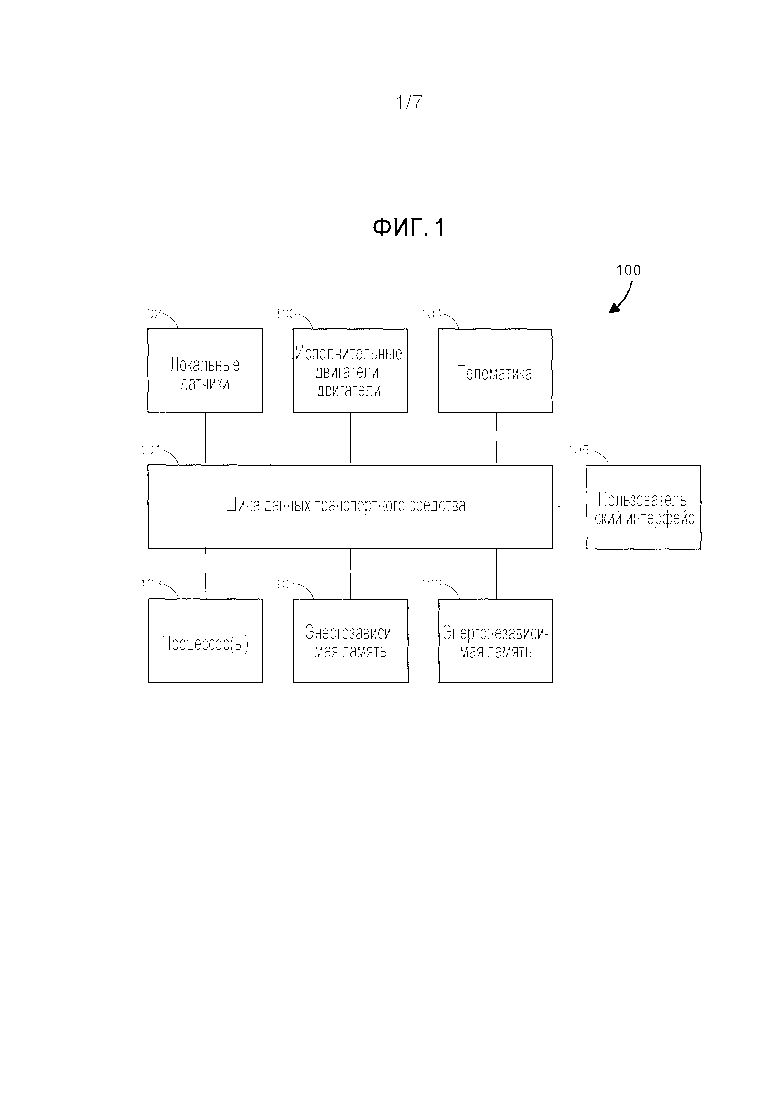
Фиг. 1 - блок-схема вычислительной системы транспортного средства.
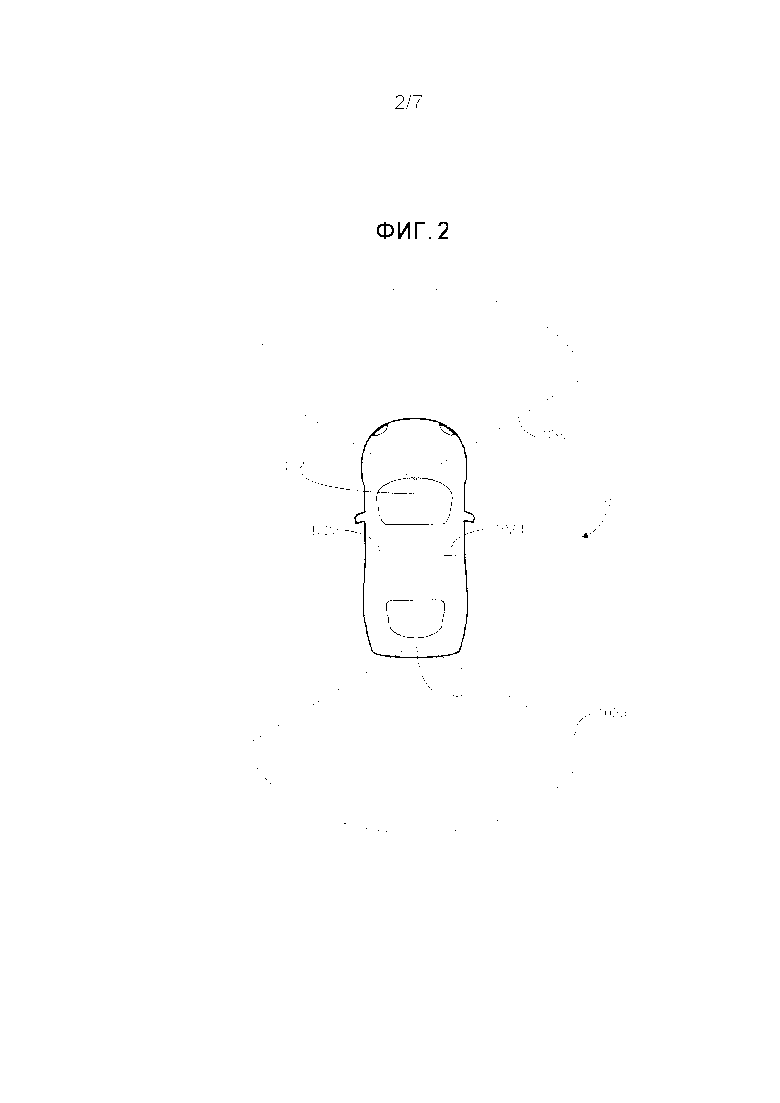
Фиг. 2 - вид сверху транспортного средства, включающего в себя вычислительную систему транспортного средства.
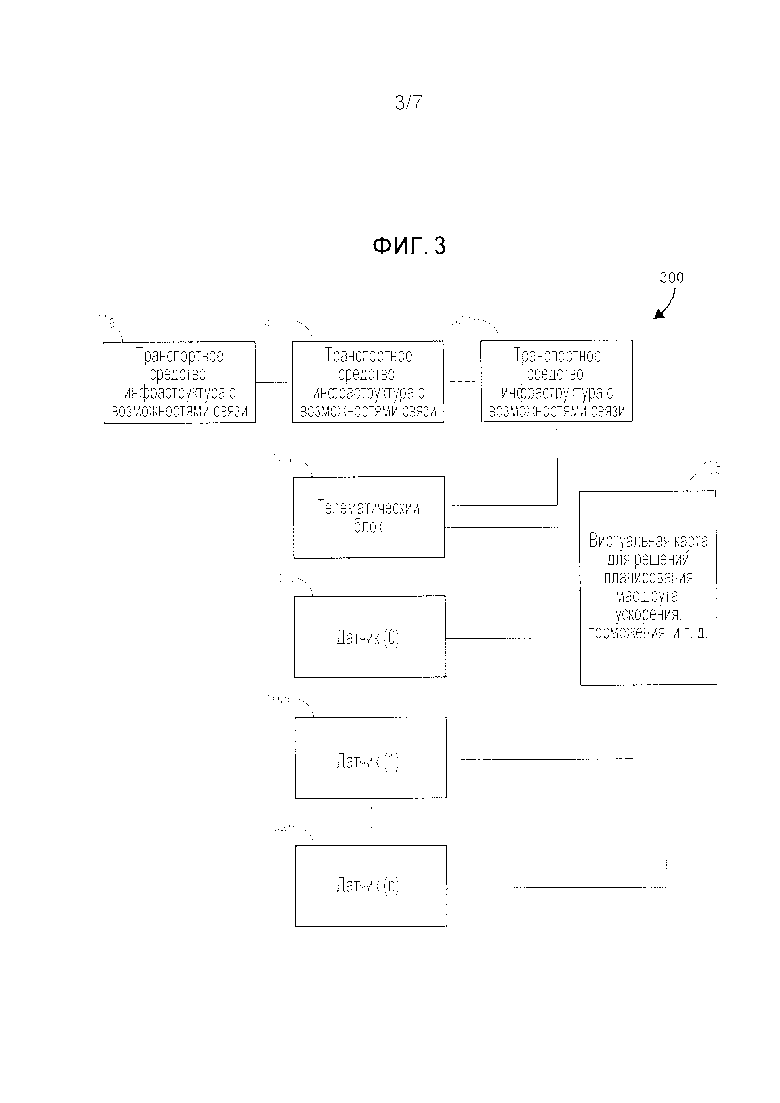
Фиг. 3 - блок-схема связи между вычислительной системой транспортного средства и внешними объектами, такими как инфраструктура или транспортные средства.
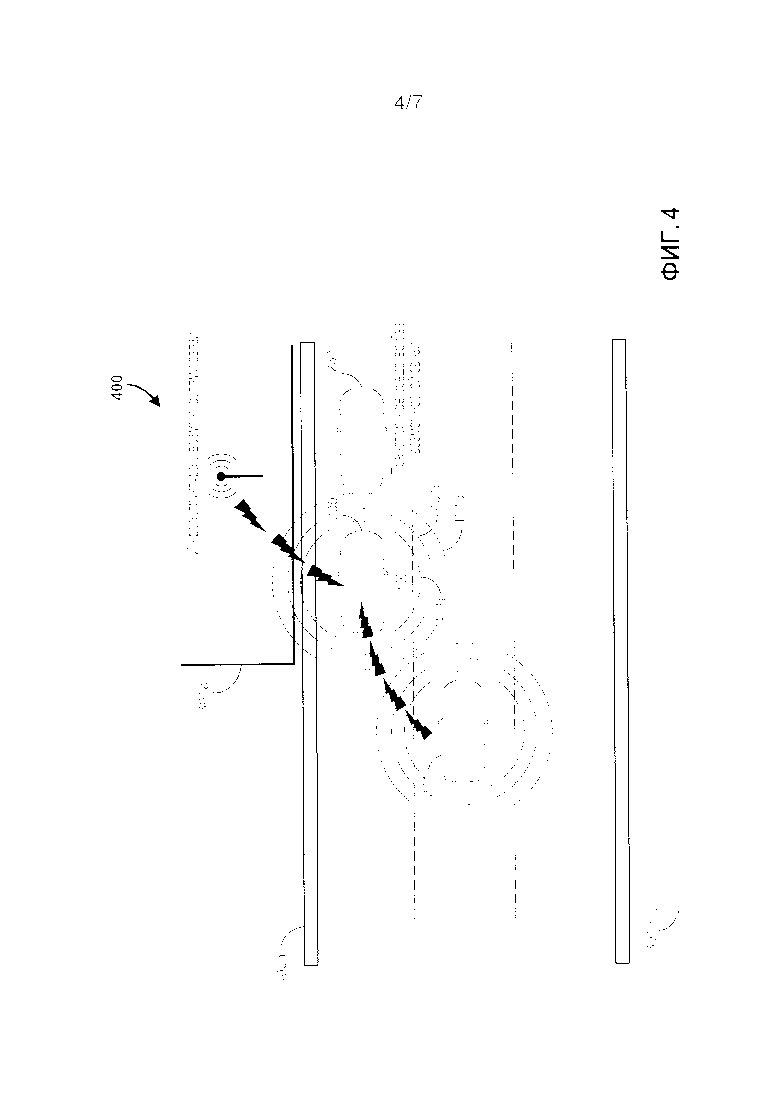
Фиг. 4 - вид сверху обстановки.
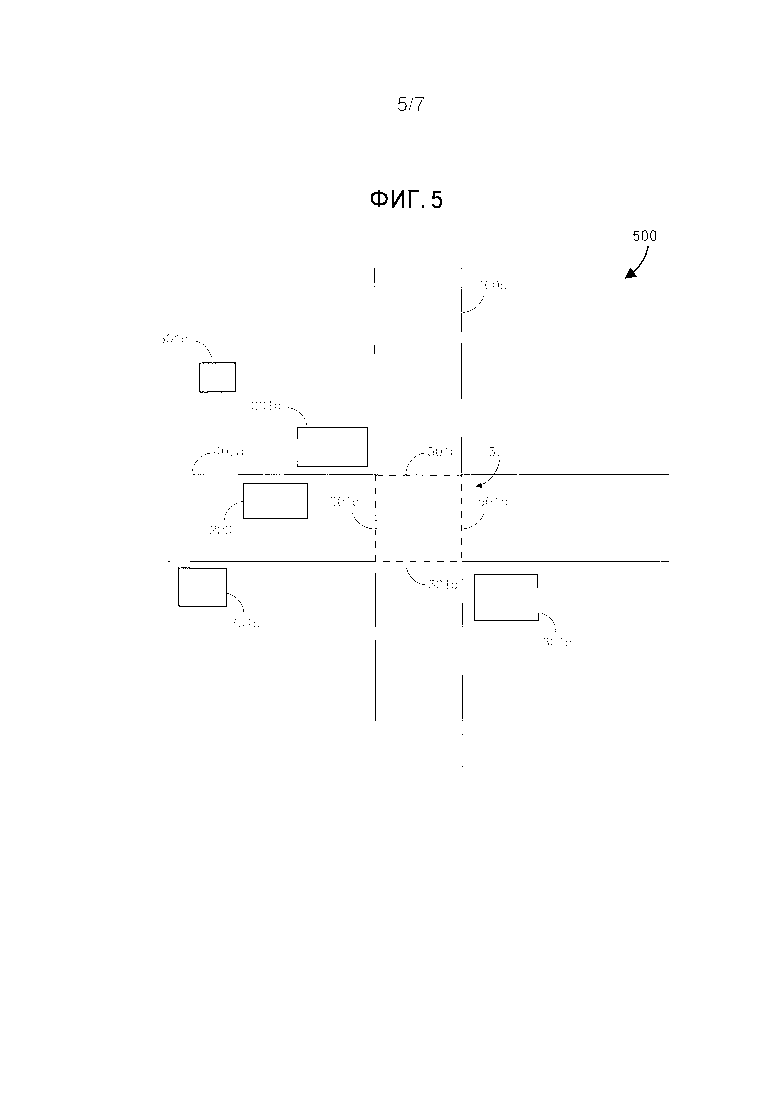
Фиг. 5 - расширенный вид сверху обстановки с исключенными некоторыми транспортными средствами.
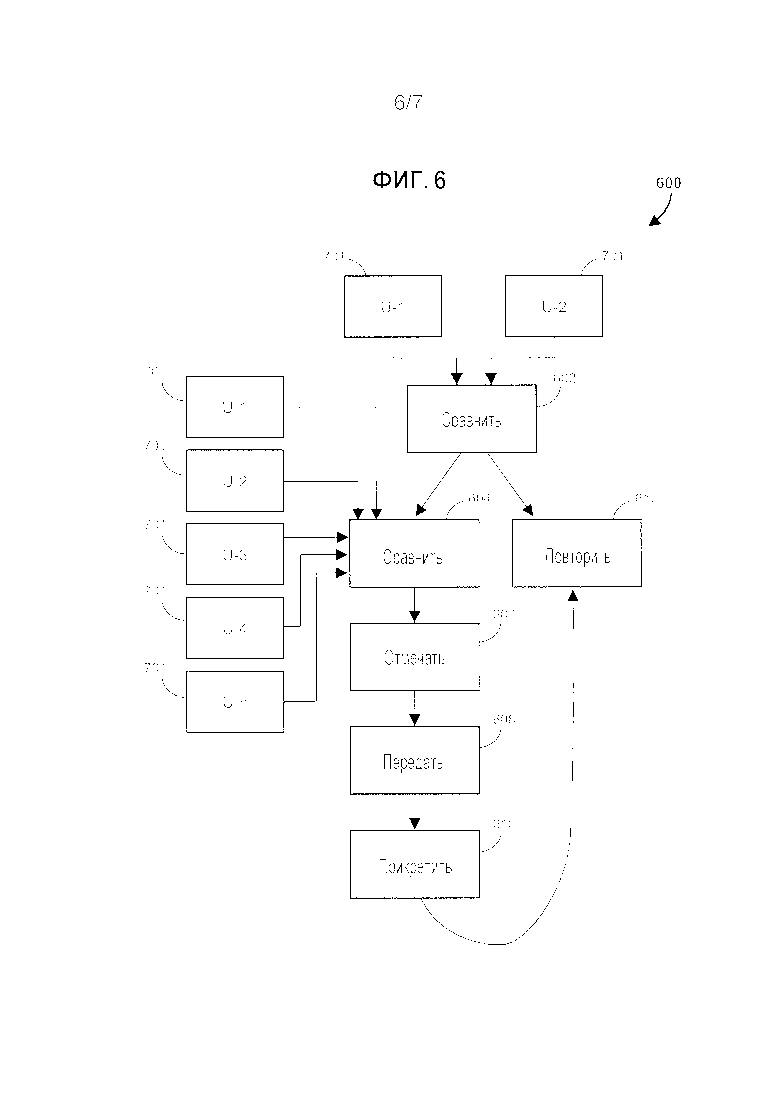
Фиг. 6 - блок-схема способа.
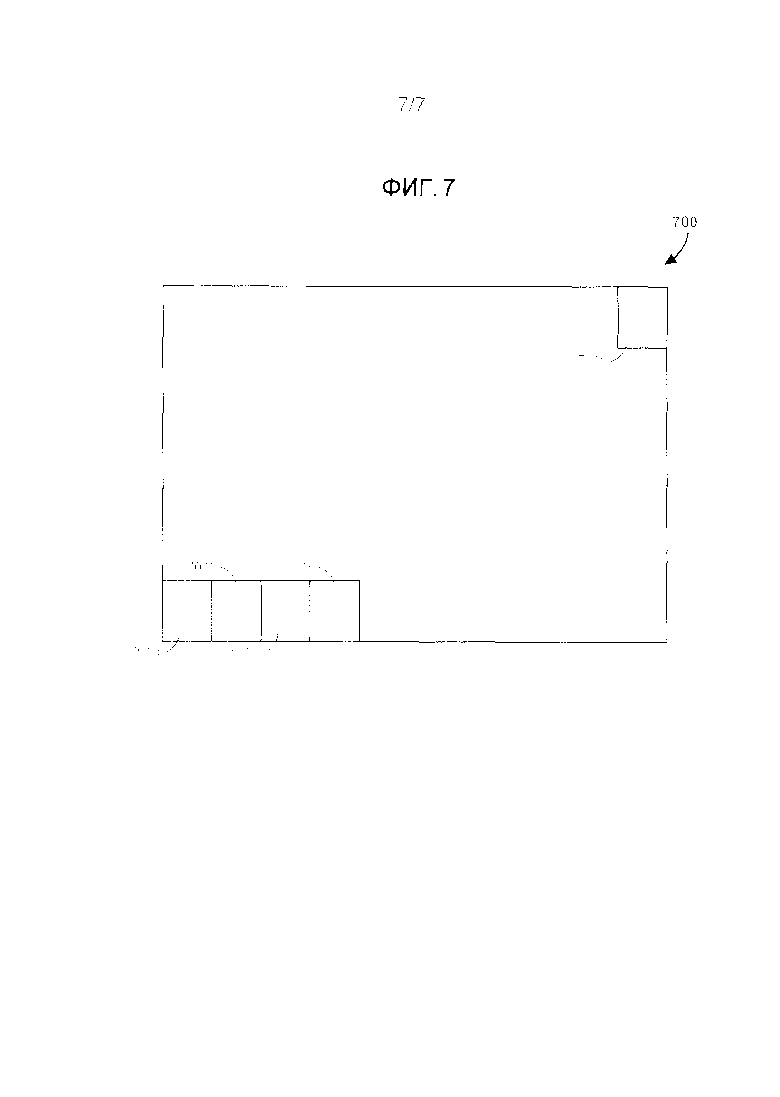
Фиг. 7 - блок-схема сообщения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Несмотря на то, что изобретение может быть реализовано в различных формах, на чертежах показаны и будут ниже описаны некоторые примерные и неограничивающие варианты осуществления с пониманием того, что настоящее раскрытие должно считаться иллюстративным примером изобретения и не подразумевается, что оно должно ограничивать изобретение проиллюстрированными конкретными вариантами осуществления.
В настоящей заявке подразумевается, что использование разделительных союзов включает в себя соединительные союзы. Использование единственного числа не подразумевает указание на количество элементов. В частности, подразумевается, что упоминание объекта в единственном числе также может обозначать один из возможного множества таких объектов. Кроме того, союз «или» может использоваться для выражения признаков, которые присутствуют одновременно, в качестве одного из возможных вариантов, и взаимоисключающих альтернатив, в качестве другого возможного варианта. Другими словами, союз «или» следует понимать как включающую в себя «и/или» в качестве одного из возможных вариантов и «любой из/или» в качестве другого возможного варианта.
Фиг. 1 показывает вычислительную систему 100 первого транспортного средства 200. Первое транспортное средство 200 наделено возможностями связи, что означает, что первое транспортное средство 200 выполнено с возможностью предложения или реализации манёвров управления на основании информации, принятой из внешних источников (например, инфраструктуры 301 с возможностями связи, других транспортных средств 201 с возможностями связи, сети Интернет, и т. д.). Транспортное средство 200 может быть автономным или полуавтономным. Первое транспортное средство 200 включает в себя электродвигатель, аккумуляторную батарею, по меньшей мере одно колесо, приводимое в движение электродвигателем, и систему рулевого управления, выполненную с возможностью поворота по меньшей мере одного колеса вокруг оси. Первое транспортное средство 200 может быть с силовым приводом на ископаемом топливе (например, дизельном топливе, бензине, природном газе), с гибридным электрическим приводом, полностью электрическим приводом, силовым приводом на топливных элементах, и т.д.
Транспортные средства описаны, например, в заявке на выдачу патента США № 14/991,496 Miller и др. (”Miller”), патенте США № 8,180,547 Prasad и др. (“Prasad”), заявке на выдачу патента США № 15/186,850 Lavoie и др. (“Lavoie”) и заявке на выдачу патента США № 14/972,761 Hu и др. (“Hu”), все из которых настоящим включены в данный документ путём ссылки в полном объёме. Первое транспортное средство 200 может включать в себя любые из признаков, описанных в источниках Miller, Prasad, Lavoie и Hu.
Вычислительная система 100 находится в первом транспортном средстве 200. Вычислительная система 100, среди прочего, обеспечивает возможность автоматического управления механическими системами в первом транспортном средстве 200 и содействует обмену информацией между первым транспортным средством 200 и внешними объектами (например, инфраструктурой 301 с возможностями связи, сетью Интернет, другими транспортными средствами 201 с возможностями связи). Вычислительная система 100 включает в себя шину 101 данных, один или более процессоров 108, энергозависимую память 107, энергонезависимую память 106, пользовательский интерфейс 105, телематический блок 104, исполнительные механизмы и электродвигатели 103, и локальные датчики 102.
Шина 101 данных транспортирует электронные сигналы или данные между электронными компонентами. Процессор 108 выполняет операции над электронными сигналами или данными, чтобы вырабатывать модифицированные электронные сигналы или данные. Энергозависимая память 107 хранит данные для почти незамедлительной выборки процессором 108. Энергонезависимая память 106 хранит данные для выборки в энергозависимую память 107 и/или процессор 108. Энергонезависимая память 106 включает в себя разнообразные энергонезависимые устройства памяти, в том числе накопитель на жёстких дисках, SSD (твердотельные диски), DVD (цифровые многофункциональные диски), Blu-Ray, и т. д. Пользовательский интерфейс 105 включает в себя устройства отображения, дисплеи с сенсорным экраном, клавиатуры, кнопки и другие устройства, которые дают возможность взаимодействия пользователя с вычислительной системой. Телематический блок 104 обеспечивает возможность как проводной, так и беспроводной связи с внешними объектами через Bluetooth, сотовую систему передачи данных (например, 3G, LTE), USB, и т. д.
Исполнительные механизмы/двигатели 103 создают ощутимые результаты. Примеры исполнительных механизмов/двигателей 103 включают в себя топливные форсунки, стеклоочистители, цепи тормозных фонарей, трансмиссии, подушки безопасности, машины, двигатели силовой передачи, рулевое управление, и т. д. Локальные датчики 102 передают цифровые показания или измерения в процессоры 108. Примеры локальных датчиков 102 включают в себя датчики температуры, датчики угла поворота, датчики ремня безопасности, датчики скорости, камеры, датчики с лазерным локатором, датчики с радиолокатором, инфракрасные датчики, ультразвуковые датчики, и т. д. Следует принимать во внимание, что любые из различных электронных компонентов по фиг. 1 могут включать в себя отдельные или специализированные процессоры и память. Дополнительные подробности о конструкции и операциях вычислительной системы 100, например, описаны в источниках Miller, Prasad, Lavoie и Hu.
Фиг. 2 показывает и иллюстрирует в общем первое транспортное средство 200, которое включает в себя вычислительную систему 100. Некоторые из локальных датчиков 102 установлены на внешней стороне первого транспортного средства 200 (другие расположены внутри транспортного средства 200). Локальный датчик 102a выполнен с возможностью обнаружения объектов, движущихся впереди транспортного средства 200. Локальный датчик 102b выполнен с возможностью обнаружения объектов, движущихся сзади транспортного средства 200, как указано задней областью 109b распознавания. Левый датчик 102c и правый датчик 102d выполнены с возможностью выполнения сходных функций для левой и правой сторон транспортного средства 200.
Как описано выше, локальные датчики 102a - 102d могут быть ультразвуковыми датчиками, датчиками с лазерным локатором, датчиками с радиолокатором, инфракрасными датчиками, камерами, микрофонами и любой их комбинацией, и т. д. Первое транспортное средство 200 включает в себя ведущий узел других локальных датчиков 102, расположенных во внутренней области транспортного средства или на внешней стороне транспортного средства. Локальные датчики 102 могут включать в себя любые или все из датчиков, раскрытых в источниках Miller, Prasad, Lavoie и Hu.
Следует принимать во внимание, что первое транспортное средство 200 выполнено с возможностью выполнения способов и операций, описанных в материалах настоящей заявки. В некоторых случаях первое транспортное средство 200 выполнено с возможностью выполнения этих функций с помощью компьютерных программ, хранимых на энергозависимых 107 и/или энергонезависимых 106 устройствах памяти вычислительной системы 100.
Процессор «выполнен с возможностью» выполнения раскрытых этапов или блоков по меньшей мере когда процессор находится на оперативной связи с памятью, хранящей программно реализованную программу с управляющей программой или командами, реализующими раскрытые этап или блок. Дополнительное описание того, каким образом взаимодействуют процессоры, память и программное обеспечение, имеется в источнике Prasad. Согласно некоторым вариантам осуществления, мобильный телефон или внешний сервер на оперативной связи с первым транспортным средством 200 выполняют некоторые или все из способов и операций, описанных ниже.
Согласно различным вариантам осуществления, первое транспортное средство 200 включает в себя некоторые или все из признаков транспортного средства 100a по источнику Prasad. Согласно различным вариантам осуществления, вычислительная система 100 включает в себя некоторые или все из признаков VCCS 102 по фиг. 2 источника Prasad. Согласно различным вариантам осуществления, первое транспортное средство 200 находится на связи с некоторыми или всеми из устройств, показанных на фиг. 1 по источнику Prasad, в том числе, переносным устройством 110, связной вышкой 116, телекоммуникационной сетью 118, сетью 120 Интернет и центром 122 обработки данных.
Термин «снаряженное транспортное средство», когда используется в формуле изобретения, настоящим определён в значении: «транспортное средство, включающее в себя: электродвигатель, множество колёс, источник питания и систему рулевого управления; при этом, электродвигатель передаёт крутящий момент на по меньшей мере одно из множества колёс, тем самым, приводя в движение по меньшей мере одно из множества колёс; при этом, источник питания подаёт энергию на электродвигатель; и при этом, система рулевого управления выполнена с возможностью управления направлением по меньшей мере одного из множества колёс». Термин «оборудованное транспортное средство с электрическим приводом» при использовании в формуле изобретения настоящим определён в значении: «транспортное средство, включающее в себя: аккумуляторную батарею, множество колёс, электродвигатель, систему рулевого управления; при этом электродвигатель передаёт крутящий момент на по меньшей мере одно из множества колёс, тем самым, приводя в движение по меньшей мере одно из множества колёс; при этом, аккумуляторная батарея является перезаряжаемой и выполнена с возможностью подачи электроэнергию на электродвигатель, тем самым возбуждая электродвигатель; и при этом система рулевого управления выполнена с возможностью управления направлением по меньшей мере одного из множества колёс».
Каждый из внешних объектов, описанных в этой заявке (например, инфраструктура с возможностями связи, другие автономные транспортные средства, мобильные телефоны, серверы) могут совместно использовать любые или все из признаков, описанных со ссылкой на фиг. 1 и 2.
Обращаясь к фиг. 3, 4 и 5, первое транспортное средство 200 принимает внешние сообщения 301a - 301n с помощью телематики 104. Сообщения могут быть необработанными данными с датчиков и/или результатами анализа необработанных данных с датчиков (анализ выполняется на внешнем объекте). Датчики могут быть установлены на инфраструктуре (например, зданиях или уличных фонарях). Датчики могут быть установлены на других автономных транспортных средствах. Внешние сообщения с 301a по 301n могут транспортироваться с помощью разновидности беспроводного сигнала (например, DSRC, Bluetooth, WiFi, сотового). Внешние сообщения 301a - 301n могут быть реализованы в пакетах, передаваемых через сеть Интернет, или внешние сообщения 301a - 301n могут передаваться прямо на первое транспортное средство 200, не проходя через сеть Интернет (например, с помощью DSRC). Информация, включённая в сообщения 301, описана ниже со ссылкой на фиг. 7.
Как изложено ранее, первое транспортное средство 100 включает в себя локальные датчики 102. Локальные датчики 102 сообщают измерения в процессоры 108. Как описано ниже, процессоры 108 анализируют измерения. Процессоры 108 строят двухмерную (2D) или трехмерную (3D) виртуальную карту на основании измерений. Следует принимать во внимание, что внешние сообщения 301 могут включать в себя иную информацию, чем сообщаемая локальными датчиками 102.
Процессоры 108 применяют сообщения 301 и измерения или показания с локальных датчиков 102 для формирования команд. Процессоры 108 управляют исполнительными механизмами/двигателями 103 на основании сообщений 301 и показаний с локальных датчиков 102. Если первое транспортное средство 200 является автономным, то процессоры 108 ведут (например, управляют направлением движения, разгоняют, тормозят) первое транспортное средство 200.
Первое транспортное средство 200 может сохранять некоторые из команд в памяти 106, 107. Первое транспортное средство 200 может передавать некоторые из команд через телематический блок 104 на внешние устройства. Команды не обязательно являются командами вождения. Команды могут побуждать первое транспортное средство 200 или внешний объект сохранять информацию (например, что инфраструктурный датчик X неправильно калиброван) в памяти.
Как изложено выше, процессоры 108 строят виртуальную карту обстановки относительно первого транспортного средства 200. Виртуальная карта включает в себя свойства дороги (например, направление движения, характеристики поверхности, расположение неподвижных препятствий), свойства внешних объектов (например, расположение, скорость, ускорение, размер), свойства инфраструктуры (например, расположение, размер) и связанные с окружающей средой свойства (например, плотность населения, температуру). Предварительное загруженное программное обеспечение или программы для автономного вождения ведут транспортное средство 200 (когда первое транспортное средство является автономным) на основании виртуальной карты. Следует принимать во внимание, что виртуальной карте не нужно отображаться и/или быть отображаемой. Виртуальная карта может быть реализована в виде последовательности объектов со связанными свойствами, хранимых в памяти.
Фиг. 4 - вид сверху обстановки 400. Первое транспортное средство 200, второе транспортное средство 201 и третье транспортное средство 250 движутся по первой дороге 400a. Второе транспортное средство 201 наделено возможностями связи и аналогично первому транспортному средству 200. Третье транспортное средство 250 является обычным транспортным средством или без возможностей связи. Первая инфраструктура 301a (например, офисное здание) находится слева от дороги 400a. Вторая инфраструктура 301b (например, офисное здание или уличный фонарь) находится справа от дороги 400a.
Фиг. 5 - расширенный вид сверху обстановки 400. Фиг. 5 не включает в себя второе и третье транспортные средства 201, 250. Первая дорога 400a пересекает вторую дорогу 400b на перекрестке 501. Третья инфраструктура 301c находится слева от дороги 400a и на большем расстоянии от дороги 400a, чем первая инфраструктура 301a. Четвертая инфраструктура 301d, аналогичная первой инфраструктуре 301a, расположена рядом с перекрестком 501. Каждый отдельный предмет инфраструктуры 301 выполнен с возможностью широковещательной передачи информации (например, через сеть Интернет или с помощью DSRC). Поэтому каждый отдельный объект инфраструктуры 301 наделён возможностями связи. Как изложено ранее, каждый отдельный предмет инфраструктуры 301 может включать в себя датчики. Показания с датчиков (необработанные или проанализированные/обработанные) включены в сообщения 700. Некоторые отдельные предметы инфраструктуры 301 могут не иметь датчиков и быть выполненными с возможностью широковещательной передачи фрагментов информации, хранимых в памяти.
Как показано на фиг. 4, первое транспортное средство 200 включает в себя множество зон 401a - 401c распознавания. Второе транспортное средство 201, будучи аналогичным первому транспортному средству 200, включает в себя аналогичные зоны. Как правило, первое транспортное средство 200 отдает предпочтение качественному и точному распознаванию (и таким образом, виртуальным картам) обстановки, попадающей в зоны, ближайшие к первому транспортному средству 200.
Например, первое транспортное средство 200 отдает наивысшее предпочтение распознаванию и построению карты обстановки в пределах первой зоны 401a, второе наивысшее предпочтение распознаванию и построению карты в пределах второй зоны 401b и третье наивысшее предпочтение распознаванию и построению карты в пределах третьей зоны 401c. Первое транспортное средство 200 может отдавать предпочтение зоне посредством: выделения добавочных ресурсов для зоны, повышения частоты измерений локальными датчиками в пределах зоны и/или выделения большего количества локальных датчиков для проведения измерений зоны, и т. д. Говоря иначе, первое транспортное средство 200 отдает предпочтение построению точной виртуальной карты обстановки, непосредственно окружающей первое транспортное средство 200 и исключает из числа приоритетных точное построение карты обстановки, отдаленной от первого транспортного средства 200. Периметр третьей зоны 401c может представлять собой максимальную дальность распознавания первого транспортного средства 200. Зоны 401 могут быть эллиптическими или в форме овала с главной осью овала или эллипса, продолжающейся параллельно главной продольной оси первого транспортного средства 200.
Описанные выше внешние сообщения 700 повышают качество виртуальной карты первого транспортного средства 200. Во-первых внешние сообщения могут строить карту обстановки, расположенной вне дальности распознавания первого транспортного средства 200. Во-вторых внешние сообщения могут включать в себя информацию, связанную с обстановкой в пределах дальности распознавания первого транспортного средства 200, таким образом, давая первому транспортному средству 200 возможность сокращать ресурсы обработки и/или распознавания такой части обстановки. Согласно некоторым вариантам осуществления, первое транспортное средство 200 полагается на локальные датчики 102 для построения карты обстановки в пределах зон 401 и на внешние датчики (то есть датчики, установленные на внешних объектах) для построения карты обстановки вне зон 401.
По мере того, как качество виртуальной карты возрастает, первое транспортное средство 200 (когда по меньшей мере полуавтономное) может задействовать определенные технологии вождения (например, более высокую скорость, выполнение разворотов), которые в ином случае деактивированы. Качество виртуальной карты может возрастать по мере того, как (a) дополнительная обстановка представляется на виртуальной карте, и/или (b) обстановка, представленная на виртуальной карте, обновляется с большей частотой. Например, и обращаясь к фиг. 5, первое транспортное средство 200 может отказываться выполнять разворот, если первое транспортное средство 200 не осведомлено о положении и скорости каждого транспортного средства на заданном расстоянии от перекрестка 501, ожидаемой зоны разворота и/или текущего положения первого транспортного средства 200.
Фиг. 7 представляет собой сообщение 700, сформированное отдельным предметом инфраструктуры 301 и/или вторым транспортным средством с возможностями связи. Сообщение 700 включает в себя блоки 701a - 701n информации. Каждый внешний объект может формировать разное сообщение 700 с разными блоками 701 информации. Блокам 701 не нужно передаваться одновременно в едином сообщении 700. Иначе говоря, сообщение 700 может представлять собой комбинацию многочисленных разных сообщений 700. Блоки 701 могут быть разбиты на подблоки. Каждый из подблоков может считаться блоком 701. Блоки могут быть категоризированы.
Сообщения 700, сформированные инфраструктурой 301 с возможностями связи, могут включать в себя некоторые или все из следующих категорий блоков 701: (a) статичные двухмерные или трехмерные размеры и координаты инфраструктуры; (b) статичные или переменные двухмерные или трехмерные размеры одной или более буферных зон наряду со свойствами буферных или запретных зон; (c) статичные и/или переменные свойства обстановки; (d) статичные и/или переменные свойства дороги; (e) статичные и/или переменные свойства обнаруженных транспортных средств (обычных или с возможностями связи); (f) статичные и/или переменные свойства пешеходов; (g) метки точности. Первое транспортное средство 200 может дополнять виртуальную карту какими-нибудь или всеми из этих свойств (таким образом, улучшая качество карты).
Что касается категории (a), инфраструктура 301 может быть предварительно запрограммирована внешним периметром инфраструктуры. Инфраструктура 301 может быть предварительно программирована внешними периметрами многочисленных отдельных предметов инфраструктуры. Например, инфраструктура 301a может сообщать внешний периметр инфраструктуры 301a, 301b и 301d.
Что касается категории (b), инфраструктура 301 может быть предварительно запрограммирована одной или более буферных зон. Хотя инфраструктура 301 может физически не занимать буферные зоны, буферные зоны представляют собой зону, где транспортное средство с возможностями связи должно функционировать некоторым необычным или нетипичным образом. Излагая иначе, буферные зоны могут включать в себя правила.
Буферные зоны могут представлять собой зоны, которые не разрешено занимать первому транспортному средству. Буферные зоны могут представлять собой зоны, которые может занимать первое транспортное средство 200, но на пониженной максимальной скорости и/или с пониженным максимальным ускорением. Например, инфраструктура может принудительно применять пониженное ограничение скорости движения в периметре автостоянки или подъездной дорожки. Буферные зоны могут побуждать первое транспортное средство 200 усиливать частоту и/или точность своей виртуальной карты. Например, инфраструктура 301 может требовать, чтобы первое транспортное средство 200 обновляло виртуальную карту по меньшей мере заданное количество раз в секунду. Такой признак, например, был бы ценным в зонах с большой плотностью пешеходов, таких как автостоянка. Буферные зоны могут побуждать первое транспортное средство 200 переходить из одного режима работы (например, режима автономного вождения) в другой режим работы (например, режим ручного вождения). Буферные зоны могут ограничивать разновидности маневров вождения, имеющихся в распоряжении у первого транспортного средства 200.
Инфраструктура 301 может быть выполнена с возможностью изменения координат буферных зон и/или свойств, связанных с буферными зонами, на основании некоторого количества факторов (например, времени суток, дня недели). Инфраструктура 301 может быть выполнена с возможностью изменения координат буферных зон и/или связанных свойств на основании измерений, выполненных инфраструктурой (например, количества людей, входящих по электронному удостоверению в инфраструктуру за минуту, объема использования лифта, количества отметок при выезде, выполненных на кассовых аппаратах, плотности людей, обнаруженной в одной или более зонах датчиками, установленными на инфраструктуре, количестве свободных мест для стоянки). Каждая буферная зона может включать в себя один или более вышеприведенных признаков.
Первое транспортное средство 200 может быть выполнено с возможностью игнорирования некоторых или всех из свойств буферной зоны. Например, первое транспортное средство 200 может быть выполнено с возможностью игнорирования или исключения участков какой-нибудь буферной зоны, которая заходит на дорогу общего пользования. Первое транспортное средство 200 может определять размеры дороги общего пользования, опираясь на локальные датчики 102 и/или принятые координаты (например, сервер с картой дорог общего пользования).
Что касается категории (c), инфраструктура 301 может передавать относящиеся к окружающей среде свойства, такие как температура, давление, влажность, и т. д. Что касается категории (d), инфраструктура может передавать свойства дороги (например, координаты выбоин, ограничения скорости движения, коэффициенты трения поверхности дороги).
Что касается категории (e), инфраструктура 301 может передавать свойства транспортных средств, обнаруженных с помощью инфраструктурных датчиков. Инфраструктура 301 может идентифицировать свойства этих транспортных средств (например, местоположение, скорость, ускорение, марку, модель, размер). Инфраструктура 301 дополнительно может идентифицировать, являются ли обнаруженные транспортные средства автономными (и, если они автономные, уровень автономности) или обычными. Инфраструктура может выполнять такое определение с помощью ответов на запросы, отправленные на идентифицированные транспортные средства.
Что касается категории (f), инфраструктура 301 может оценивать плотность пешеходов в пределах определенной зоны (например, одной из буферных зон). Инфраструктура 301 может выполнять такую оценку с помощью описанных выше посреднических технологий (например, объема въездов по электронным удостоверениям), подсчитывающих количество людей в и вокруг инфраструктуры (например, с помощью датчиков), или с помощью предварительного запрограммированного алгоритма, основанного на текущем времени и дне (например, в будние дни с 8 часов утра до 7 часов вечера плотность пешеходов всегда оценивается высокой).
Категория (f) действует подобно буферной зоне и может быть реализована в виде буферной зоны. Любая из вышеприведенной информации может быть реализована в виде буферной зоны.
Как описано выше, первое транспортное средство 200 может настраивать технологии автономного вождения на основании виртуальной карты. Виртуальная карта (за исключением описанного ниже со ссылкой на отмеченные категории) обновляется на основании сообщений 700 и блоков 701, содержащихся в них. Например, первое транспортное средство 200 может настраивать свою текущую скорость, максимальную скорость, текущее ускорение, максимальное ускорение, частоту обновления виртуальной карты и/или виды маневров вождения (например, разворотов) на основании любых из описанных выше признаков или виртуальной карты.
Что касается блока (g), инфраструктура 301 может связывать достоверность или точность с любым из описанных выше блоков 701 или их категориями. Достоверность или точность реализованы в метке. Метка может быть результатом анализа, выполненного инфраструктурой 301, транспортным средством с возможностями связи, удаленным сервером или любым другим объектом с возможностями связи.
Способ 600 выполнения анализа меток показан на фиг. 6. Как изложено ранее, любой объект (например, инфраструктура с возможностями связи, удаленный сервер, автономное транспортное средство) может выполнять способ 600. В примере, приведенном ниже, первое транспортное средство 200 выполняет способ 600.
В качестве общего представления, способ 600 сравнивает блоки 701, сформированные разными объектами, отмечает выбросовые блоки и категории, связанные с выбросовыми блоками, а затем побуждает: (a) транспортные средства с возможностями связи отбрасывать или игнорировать будущие блоки 701, переданные из ответственного объекта и подпадающие под отмеченную категорию, и/или (b) ответственный объект прикреплять индикатор низкой достоверности к каждому блоку 701, связанному с отмеченной категорией.
Ради ясности (а не в качестве ограничения): (a) каждый блок 701 подпадает под заданную категорию блока; (b) каждое сообщение 700 может включать в себя многочисленные категории блоков 701; (c) отмеченный блок 701 является выбросовым или неточным измерением; (d) отмеченная категория является категорией, связанной с отмеченным блоком 701; (e) отмеченная категория может включать в себя двоичную метку или может включать в себя частоту метки (то есть частоту блоков 701 в пределах категории, являющихся отмеченными) и/или значимость метки (например, среднюю величину ошибки отмеченных блоков 701); (f) когда категория объекта отмечена, отмечены все блоки, связанные с такой категорией и переданные из объекта; (g) ответственный объект является объектом, ответственным за передачу отмеченного блока.
В блоке 602 первое транспортное средство сравнивает множество блоков 701, сформированных разными объектами или разными датчиками в пределах одного и того же объекта. В этом примере, блок u-1 сформирован первым транспортным средством 200. Блок u-2 сформирован инфраструктурой 301a. В блоке 602 первое транспортное средство 200 определяет, совпадают ли сравниваемые блоки в заданной степени или не совпадают на более чем заданную величину (термин «совпадает» в качестве применяемого в материалах настоящей заявки предполагает совпадение в заданной степени).
Например, в блоке 602 первое транспортное средство 200 может сравнивать скорость второго транспортного средства 201, определенную первым транспортным средством 200, со скоростью второго транспортного средства 201, определенной инфраструктурой 301a. Так как скорость второго транспортного средства 201 меняется со временем, метка времени блока 701, сформированного первым транспортным средством 200, должна совпадать (в пределах заданной степени) с меткой времени блока 701, сформированного инфраструктурой 301a. Когда блоки 701 не являются зависящими от времени (например, размерами инфраструктуры в противоположность скорости транспортного средства), метки времени могут игнорироваться, и/или может повышаться заданная степень. Значимость меток времени и заданных степеней совпадения меток времени может меняться в зависимости от категории.
Если сравниваемые блоки совпадают, то новое сравнение выполняется в блоке 612 (то есть способ 600 повторяется на других блоках 701). Если сравниваемые блоки не совпадают, то первое транспортное средство 200 переходит к блоку 604.
В блоке 604 первое транспортное средство 200 рассматривает дополнительные блоки 701, зарегистрированные другими объектами. Блок u-3 может быть сформирован вторым транспортным средством 201. Блок u-4 может быть сформирован инфраструктурой 301d. Если сравниваемый блок является зависящим от времени, то (a) дополнительные блоки должны иметь метку времени, совпадающую с меткой времени блоков, рассматриваемых во время блока 602 (это означает, что первое транспортное средство 200 принимало и сохраняло дополнительные блоки, и/или другие блоки выполнены с возможностью сохранения предыдущих блоков и передачи предыдущих блоков в ответ на запрос); и (b) первое транспортное средство 200 принимает обновленные измерения от каждого объекта (то есть первое транспортное средство 200 принимает обновленные u-1 и u-2, такие метки времени из u-1 - u-n совпадают).
В блоке 604 первое транспортное средство 200 сравнивает u-1, u-2, u-3, u-4, …u-n. Первое транспортное средство 200 выполняет статистический анализ над сравниваемыми блоками, чтобы найти выбросы. В блоке 606 первое транспортное средство 200 отмечает выбросы (может быть один или ноль выбросов). Например, первое транспортное средство 200 может усреднять блоки 701, находить среднеквадратическое отклонение, затем отмечать блоки 701, выпадающие за пределы среднеквадратического отклонения, как являющиеся выбросами. Пригодны и другие статистические алгоритмы. Если имеется ноль выбросов, то способ 600 переходит к блоку 612.
Первое транспортное средство 200 сохраняет метки в памяти 106, 107. При условии отмеченного выброса, первое транспортное средство 200 может (a) игнорировать все сообщения, формируемые объектом, ответственным за отмеченный выброс, (b) игнорировать части сообщений (например, многочисленные категории), сформированных ответственным объектом, или (c) игнорировать блоки 701, переданные только из ответственного объекта, попадающего в ту же самую категорию, что и отмеченный выброс (например, скорость транспортных средств). Как описано ниже, первое транспортное средство 200 дополнительно может учитывать частоту присвоения меток и/или значимость присвоения меток категории при определении, следует ли игнорировать категорию или сообщения из ответственного объекта.
Отсюда следует, что каждый объект, в том числе, первое транспортное средство 200, выполнен с возможностью категоризации блоков 701 (например, категория 1: измерения скорости транспортных средств; категория 2: положения транспортных средств; категория 3: температура, и т. д.). Согласно некоторым вариантам осуществления, каждый блок 701 может отмечаться категорией перед беспроводной передачей. Согласно некоторым вариантам осуществления, объекты выполнены с возможностью повторной категоризации блоков 701 согласно локальному программному обеспечению (например, инфраструктура 301a категоризует блок 701 как попадающий в категорию 1, но первое транспортное средство повторно категоризует блок 701 как попадающий в категорию 2 или обе из категорий 1 и 2).
В блоке 608 первое транспортное средство 200 передает метки и/или идентичности отмеченных категорий (наряду с идентичностью ответственного объекта) на объекты с возможностями связи. Объекты с возможностями связи (например, второе транспортное средство 201) могут выполнять некоторые или все из тех же функций, что и первое транспортное средство 200, в ответ на метки. Метки могут включать в себя величину ошибки.
Согласно некоторым вариантам осуществления, объекты с возможностями связи, принимающие идентичность ответственного блока, пропускают блок 608, чтобы избежать избыточности. Согласно некоторым вариантам осуществления, объекты с возможностями связи периодически обновляют централизованный сервер ответственными объектами, отмеченными категориями (которые могут включать в себя частоту присвоения меток или значимость присвоения меток) и/или отмеченными блоками 701. Обновление может происходить с заданной частотой и при обнаружении нового ответственного объекта.
Согласно этим вариантам осуществления, объекты с возможностями связи периодически запрашивают централизованный сервер и загружают идентичности ответственных объектов, отмеченные категории и/или отмеченные блоки. Согласно некоторым вариантам осуществления, объекты с возможностями связи запрашивают с централизованного сервера только уместные ответственные объекты (например, ответственные объекты только в пределах заданной дальности от текущего местоположения запрашивающего объекта или в пределах заданной дальности от маршрута запрашивающего объекта). Согласно некоторым вариантам осуществления, централизованный сервер определяет частоту присвоения меток и/или значимость присвоения меток ответственного объекта на основании множества выгрузок из множества объектов.
В блоке 610 ответственный объект прикрепляет индикатор низкой достоверности к по меньшей мере блокам 701 в той же самой категории, что и отмеченный выброс (например, все блоки 701, связанные со скоростями транспортного средства). Излагая иначе, ответственный объект отмечает категорию, связанную с отмеченным выбросовым блоком 701. Будущие блоки 701 в той же самой категории (то есть отмеченной категории), переданные ответственным объектом, включают в себя индикатор низкой достоверности. Согласно некоторым вариантам осуществления, объекты выполнены с возможностью включать в себя, в индикаторе низкой достоверности, частоту, с которой метятся блоки 701, подпадающие под определенную категорию (то есть частоту присвоения меток). Согласно некоторым вариантам осуществления, объекты выполнены с возможностью фиксирования значимости присвоения меток (например, средней величины) отмеченных блоков 701, подпадающих под определённую категорию.
Таким образом, транспортные средства могут быть выполнены с возможностью игнорирования или отбрасывания блоков 701, к которым прикреплен индикатор низкой достоверности (то есть блоков, связанных с отмеченной категорией). Транспортные средства могут быть выполнены с возможностью игнорирования или отбрасывания блоков 701, связанных с категориями, превышающими заданную пороговую частоту присвоения меток. Заданная пороговая частота присвоения меток может изменяться по категориям (например, категория температуры имеет высокую пороговую частоту, тогда как положение транспортного средства имеет низкую пороговую частоту).
Ответственный объект может формировать ремонтное предупреждение в ответ на отмеченный блок, категорию и/или превышение категорией заданной частоты присвоения меток. Ремонтное предупреждение может отображаться на пользовательском интерфейсе (например, дисплейном экране). В блоке 610 способ переходит к блоку 612 (описанному выше).
Блоки 602 и 604 могут быть объединены в единый блок, в котором первое транспортное средство 200 сначала сравнивает более двух блоков 701 и выполняет алгоритм статистических выбросов при начальном сравнении.
Объекты с возможностями связи могут быть выполнены с возможностью прекращения широковещательной передачи отмеченных категорий, превышающих определённую частоту присвоения меток или значимость присвоения меток. Объекты с возможностями связи могут быть выполнены с возможностью инициирования способа 600. Например, когда объект с возможностями связи имеет отмеченную категорию (или категорию, превышающую заданную частоту присвоения меток), то объект с возможностями связи может автоматически и периодически запрашивать (или повышать частоту запросов), чтобы другие объекты подтверждали метку категории. Если повторению способа 600 не удается прийти к тому же самому заключению, то объект с возможностями связи может удалять метку категории. Дополнительно, объекты с возможностями связи с по меньшей мере одной меткой категории могут быть выполнены с возможностью автоматического и периодического запроса (или повышения частоты запросов) для анализа категорий, отличных от отмеченной категории. Например, объекты могут предполагать, что, если отмечена категория положения транспортного средства, то категория скорости транспортного средства также может быть дефектной.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БАЗОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СООТВЕТСТВУЮЩЕЕ БАЗОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2692168C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) И СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ МЕСТНОСТИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2017 |
|
RU2704079C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ДВЕРЬМИ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2705890C2 |
| Система контроля жизненного цикла объекта и его инфраструктуры (варианты) | 2019 |
|
RU2755146C2 |
| СМЕЩЕНИЕ ОПЕРЕЖЕНИЯ СИНХРОНИЗАЦИИ ДЛЯ ПЕРЕКЛЮЧЕНИЯ МЕЖДУ ВОСХОДЯЩЕЙ ЛИНИЕЙ СВЯЗИ И НИСХОДЯЩЕЙ ЛИНИЕЙ СВЯЗИ В НОВОМ РАДИО | 2018 |
|
RU2739289C1 |
| УЛУЧШЕННЫЙ СПОСОБ И СИСТЕМА ОБРАБОТКИ ИНФОРМАЦИИ КАРТ ДЛЯ НАВИГАЦИИ ПРОМЫШЛЕННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2542932C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ВОЗМОЖНОСТЬЮ УПРАВЛЕНИЯ ФАРАМИ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2017 |
|
RU2680947C2 |
| ТЕХНОЛОГИИ ДЛЯ ПРЕДОСТАВЛЕНИЯ МАКСИМАЛЬНОЙ ГЛУБИНЫ ИДЕНТИФИКАТОРА СЕГМЕНТА УЗЛА И/ИЛИ ЛИНИИ СВЯЗИ, ИСПОЛЬЗУЮЩИЕ OSPF | 2016 |
|
RU2704714C1 |
| СПОСОБ ОЦЕНКИ ПОТРЕБЛЕНИЯ МОЩНОСТИ | 2010 |
|
RU2636848C2 |
| СПОСОБ И СИСТЕМА ДЛЯ СОВМЕСТНОГО ИСПОЛЬЗОВАНИЯ ИНФОРМАЦИИ КАРТ, СВЯЗАННОЙ С АВТОМАТИЧЕСКИМИ ПРОМЫШЛЕННЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2012 |
|
RU2587641C2 |
Группа изобретений относится к виртуальной карте транспортного средства. Транспортное средство включает в себя: двигатель(и), локальные датчики, процессор(ы). Процессор(ы) выполненный(е) с возможностью выполнения посредством двигателей и рулевого управления множества маневров вождения. С возможностью формирования виртуальной карты на основании локальных датчиков. С возможностью приёма множества сообщений из множества внешних объектов, статистического сравнения множества сообщений и идентификации выбросового сообщения на основании статистического сравнения. С возможностью инструктирования внешнего объекта, ответственного за выбросовое сообщение, отмечать будущие сообщения. С возможностью игнорирования отмеченных сообщений, а также формирования виртуальной карты на основании неотмеченных сообщений и перераспределения ресурсов обработки виртуальной карты на основании неотмеченных сообщений. Обеспечивается эффективное формирование сведений распознанных свойств объектов и передача сведений на автономное транспортное средство. 3 н. и 17 з.п. ф-лы, 7 ил.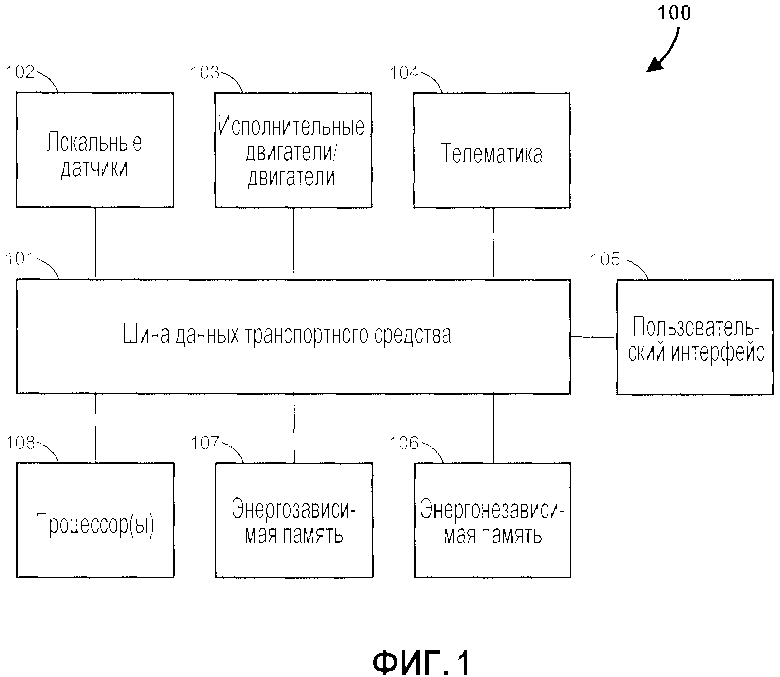
1. Транспортное средство, содержащее:
рулевое управление,
двигатели,
локальные датчики и
процессоры, выполненные с возможностью:
выполнения посредством двигателей и рулевого управления множества маневров вождения,
формирования виртуальной карты на основании локальных датчиков и сообщения из внешнего объекта; и
на основании упомянутого сообщения:
перераспределения ресурсов обработки виртуальной карты и
ограничения по меньшей мере одного из множества маневров вождения.
2. Транспортное средство по п. 1, в котором процессоры выполнены с возможностью перераспределения ресурсов обработки виртуальной карты путём сокращения ресурсов обработки, выделенных на некоторые географические зоны виртуальной карты, причём некоторые географические зоны определяются на основании сообщения.
3. Транспортное средство по п. 2, в котором процессоры выполнены с возможностью управления двигателями на основании виртуальной карты.
4. Транспортное средство по п. 1, в котором процессоры выполнены с возможностью выделения первых ресурсов обработки на формирование по меньшей мере части виртуальной карты по локальным датчикам и, на основании приёма упомянутого сообщения, выделения вторых ресурсов обработки на формирование по меньшей мере части виртуальной карты по локальным датчикам.
5. Транспортное средство по п. 4, в котором первые ресурсы обработки превосходят вторые ресурсы обработки.
6. Транспортное средство по п. 5, в котором ресурсы обработки содержат частоту формирования таким образом, что при применении первых ресурсов обработки процессоры формируют по меньшей мере часть виртуальной карты с первой частотой, а при применении вторых ресурсов обработки процессоры формируют по меньшей мере часть виртуальной карты со второй, более низкой частотой.
7. Транспортное средство по п. 1, в котором упомянутое сообщение содержит координаты зоны и правило зоны.
8. Транспортное средство по п. 7, в котором правило зоны является максимальным ускорением и процессоры выполнены с возможностью управления двигателями на основании максимального ускорения.
9. Транспортное средство по п. 7, при этом правило зоны является запрещённым маневром рулевого управления и процессоры выполнены с возможностью предотвращения выполнения рулевым управлением запрещённого манёвра рулевого управления, когда обнаружено, что транспортное средство находится в зоне.
10. Транспортное средство по п. 9, в котором процессоры выполнены с возможностью:
разрешения запрещённого манёвра рулевого управления, когда обнаружено, что транспортное средство находится вне зоны.
11. Транспортное средство по п. 1, в котором сообщение содержит отмеченный блок и при этом процессоры выполнены с возможностью: обнаружения метки и, на основании обнаружения, игнорирования упомянутого блока.
12. Транспортное средство по п. 11, в котором сообщение содержит неотмеченный блок и при этом процессоры выполнены с возможностью формирования виртуальной карты на основании неотмеченного блока.
13. Транспортное средство по п. 1, в котором процессоры выполнены с возможностью:
приёма множества сообщений из множества внешних объектов, статистического сравнения множества сообщений и идентификации выбросового сообщения на основании статистического сравнения.
14. Транспортное средство по п. 13, в котором процессоры выполнены с возможностью:
сравнения меток времени множества сообщений и выбора сообщений для статистического сравнения на основании сравнения меток времени.
15. Транспортное средство по п. 13, в котором процессоры выполнены с возможностью: инструктирования внешнего объекта, ответственного за выбросовое сообщение, отмечать будущие сообщения.
16. Транспортное средство по п. 15, в котором процессоры выполнены с возможностью:
игнорирования отмеченных сообщений.
17. Транспортное средство по п. 13, в котором статистическое сравнение множества сообщений содержит статистическое сравнение только выбранных частей множества сообщений.
18. Транспортное средство по п. 1, в котором сообщение содержит частоту присвоения меток и процессоры выполнены с возможностью формирования виртуальной карты на основании частоты присвоения меток.
19. Транспортное средство, содержащее:
рулевое управление,
двигатели,
локальные датчики и
процессоры, выполненные с возможностью:
выполнения посредством двигателей и рулевого управления множества маневров вождения,
формирования виртуальной карты на основании локальных датчиков;
приёма множества сообщений из множества внешних объектов, статистического сравнения множества сообщений и идентификации выбросового сообщения на основании статистического сравнения;
инструктирования внешнего объекта, ответственного за выбросовое сообщение, отмечать будущие сообщения;
игнорирования отмеченных сообщений;
формирования виртуальной карты на основании неотмеченных сообщений и
ограничения по меньшей мере одного из множества маневров вождения на основании одного или более из множества сообщений.
20. Транспортное средство, содержащее:
рулевое управление,
двигатели,
локальные датчики,
процессоры, выполненные с возможностью:
выполнения посредством двигателей и рулевого управления множества маневров вождения,
формирования виртуальной карты на основании локальных датчиков;
приёма множества сообщений из множества внешних объектов, статистического сравнения множества сообщений и идентификации выбросового сообщения на основании статистического сравнения;
инструктирования внешнего объекта, ответственного за выбросовое сообщение, отмечать будущие сообщения;
игнорирования отмеченных сообщений;
формирования виртуальной карты на основании неотмеченных сообщений;
перераспределения ресурсов обработки виртуальной карты на основании неотмеченных сообщений и
ограничения по меньшей мере одного из множества маневров вождения на основании одного или более из множества сообщений.
| RU 2015104551 A, 27.08.2016 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА В ДИНАМИЧЕСКОЙ СРЕДЕ | 2012 |
|
RU2479015C1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

