ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящая заявка относится к распространению сообщений между (a) транспортными средствами и (b) транспортными средствами и серверами.
УРОВЕНЬ ТЕХНИКИ
Существующие транспортные средства выполнены с возможностью обмениваться информацией с другими транспортными средствами с помощью технологии связи между транспортными средствами (V2V) и обмениваться информацией с серверами с помощью технологии связи между транспортным средством и инфраструктурой (V2I). Существующие транспортные средства, таким образом, являются допускающими V2X, означая, что они допускают связь V2V и V2I. Существующие транспортные средства выполнены с возможностью формировать результаты вождения на основании распознанных событий. Необходим новый протокол связи для трансляции распознанных событий между серверами и между транспортными средствами с помощью V2X.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Раскрыто базовое транспортное средство включающее в себя: двигатель(и), датчики, процессор(ы), выполненный с возможностью: (i) упаковывать считанные датчиками данные в первый блок; (ii) определять, является ли соединение между транспортным средством и инфраструктурой (a) действующим или (b) недействующим; (iii) если (a), дополнять блок флажковым признаком со значением ИСТИНА, а если (b), дополнять блок флажковым признаком со значением ЛОЖЬ; (iv) передавать первый дополненный блок через соединение между транспортными средствами; (v) определять, включает ли в себя второй дополненный блок, принятый через соединение между транспортными средствами, (c) флажковый признак со значением ИСТИНА или (d) флажковый признак со значением ЛОЖЬ; (vi) если (d), передавать второй дополненный блок через соединение между транспортным средством и инфраструктурой; (vii) если (c), не передавать второй дополненный блок через соединение между транспортным средством и инфраструктурой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ради лучшего понимания изобретения можно обратиться к вариантам осуществления, показанным на нижеследующих чертежах. Компоненты на чертежах не обязательно находятся в масштабе, и связанные элементы могут быть опущены или, в некоторых случаях, могли быть преувеличены пропорции, с тем чтобы подчеркнуть и ясно проиллюстрировать обладающие новизной признаки, описанные в материалах настоящей заявки. В дополнение, компоненты системы могут быть скомпонованы по-разному, как известно в данной области техники. Кроме того, на чертежах, одинаковые ссылочные позиции обозначают соответствующие части на всем протяжении нескольких видов.
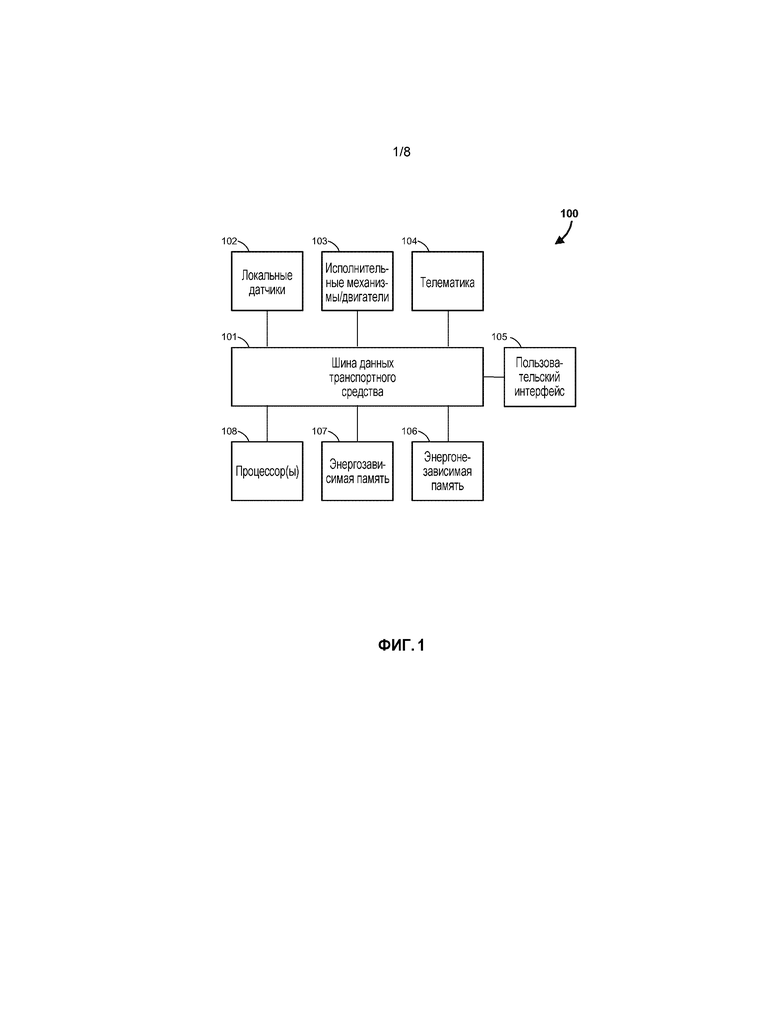
Фиг. 1 - структурная схема вычислительной системы транспортного средства.
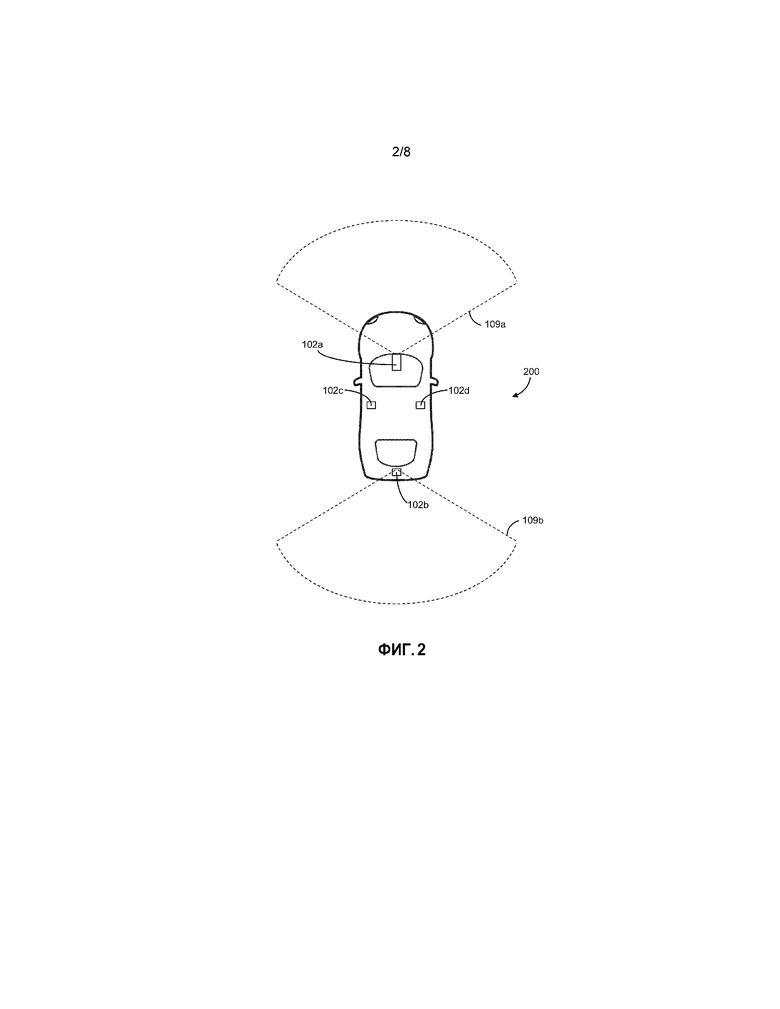
Фиг. 2 - вид сверху базового транспортного средства, включающего в себя вычислительную систему транспортного средства.
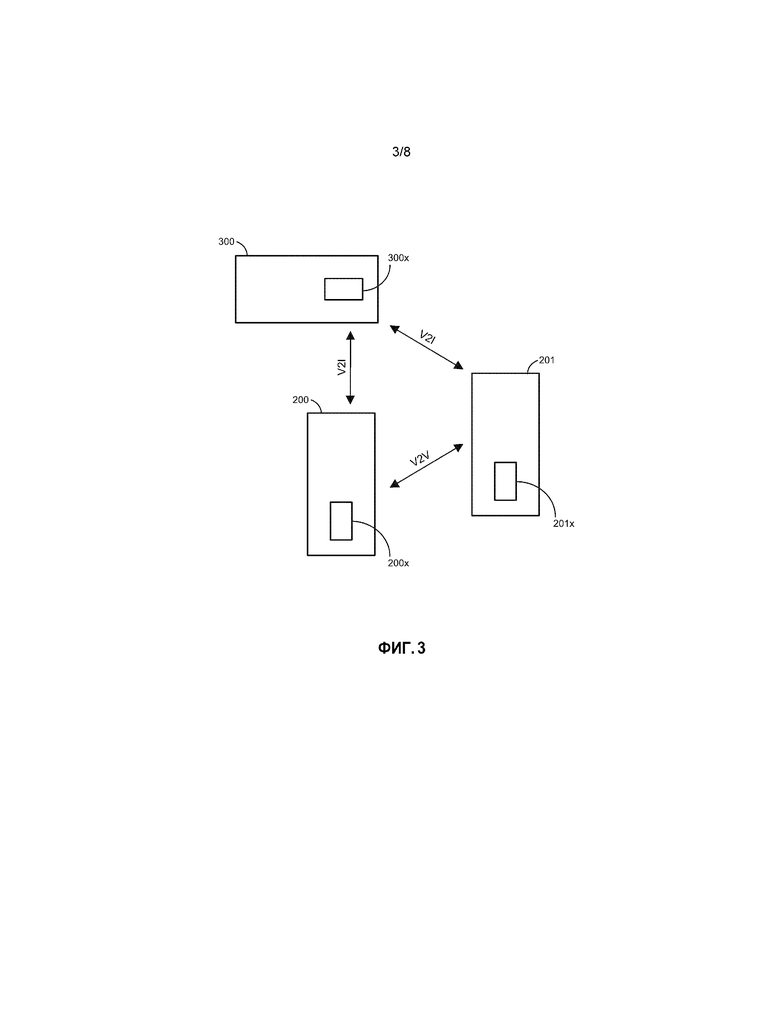
Фиг. 3 - структурная схема обмена информацией по V2X, совместимого с настоящим изобретением.
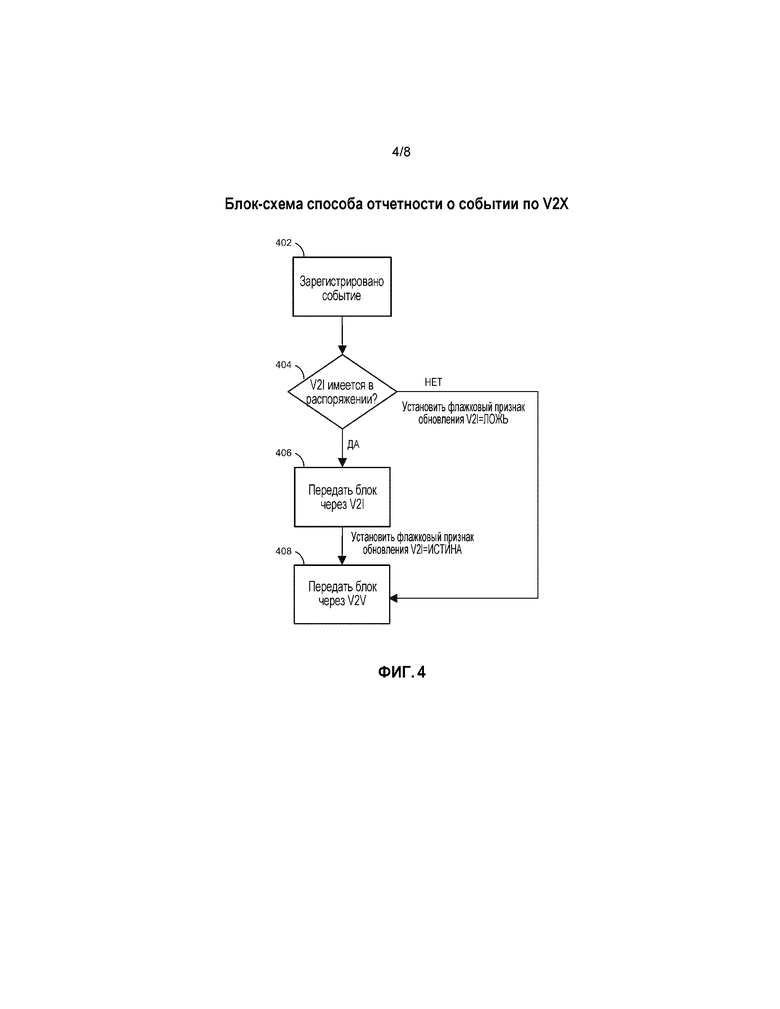
Фиг. 4 - структурная схема добавления флажкового признака в обмен информацией по V2V.
Фиг. 5 - визуализированная виртуальная карта.
Фиг. 6 - структурная схема обработки обмена информацией по V2V.
Фиг. 7 - схема распространения сообщения V2V.
Фиг. 8 - структурная схема распространения сообщения V2V.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Несмотря на то, что изобретение может быть воплощено в различных формах, на чертежах показаны и будут описаны в дальнейшем некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее раскрытие должно считаться иллюстративным примером изобретения и не подразумевается, что должно ограничивать изобретение проиллюстрированными конкретными вариантами осуществления.
В этой заявке подразумевается, что использование разделительных союзов должно включать в себя соединительные союзы. Использование формы единственного числа не подразумевается указывающим мощность множества. В частности, подразумевается, что ссылка на объект также должна обозначать один из возможного множества таких объектов. Кроме того, союз «или» может использоваться для выражения признаков, которые присутствуют одновременно, в качестве одного из возможных вариантов, и взаимоисключающих альтернатив, в качестве другого возможного варианта. Другими словами, союз «или» следует понимать включающим в себя «и/или» в качестве одного из возможных вариантов и «любой из/или» в качестве другого возможного варианта.
Фиг. 1 показывает вычислительную систему 100 базового транспортного средства 200. Базовое транспортное средство наделено возможностями связи, означая, что базовое транспортное средство 200 выполнено с возможностью (a) принимать данные беспроводной связи из внешних объектов (например, инфраструктуры, серверов, других транспортных средств с возможностями связи) и (b) передавать данные беспроводной связи на внешние объекты. Базовое транспортное средство 200 может быть автономным, полуавтономным или ручным. Базовое транспортное средство 200 включает в себя электродвигатель, аккумуляторную батарею, по меньшей мере одно колесо, приводимое в движение электродвигателем, и систему рулевого управления, выполненную с возможностью поворачивать по меньшей мере одно колесо вокруг оси. Базовое транспортное средство 200 может быть с силовым приводом на ископаемом топливе (например, дизельном топливе, бензине, природном газе), с гибридным электрическим, полностью электрическим приводом, с силовым приводом на топливных элементах, и т. д.
Транспортные средства, например, описаны в заявке на выдачу патента США под № 15/076,210 на Miller, патенте США под № 8,180,547 на Prasad, заявке на выдачу патента США под № 15/186,850 на Lavoie , публикации патента США под № 2016/0117921 на D’Amato и заявке на выдачу патента США под № 14/972,761 на Hu, все из которых настоящим включены в настоящий документ посредством ссылки во всей своей полноте. Базовое транспортное средство 200 может включать в себя любые из признаков, описанных в публикациях Miller, Prasad, Lavoie, D’Amato и Hu.
Вычислительная система 100 находится в базовом транспортном средстве 200. Вычислительная система 100, среди прочего, дает возможность автоматического управления механическими системами в базовом транспортном средстве 200 и содействует обмену информацией между базовым транспортным средством 200 и внешними объектами (например, инфраструктурой с возможностями связи, сетью Интернет, другими транспортными средствами с возможностями связи). Вычислительная система 100 включает в себя шину 101 данных, один или более процессоров 108, энергозависимую память 107, энергонезависимую память 106, пользовательский интерфейс 105, телематический блок 104, исполнительные механизмы и электродвигатели 103, и локальные датчики 102.
Шина 101 данных транспортирует электронные сигналы или данные между электронными компонентами. Процессор 108 выполняет операции над электронными сигналами или данными, чтобы вырабатывать модифицированные электронные сигналы или данные. Энергозависимая память 107 хранит данные для почти незамедлительной выборки процессором 108. Энергонезависимая память 106 хранит данные для выборки в энергозависимую память 107 и/или процессор 108. Энергонезависимая память 106 включает в себя диапазон энергонезависимых устройств памяти, в том числе, накопитель на жестких дисках, SSD (твердотельные диски), DVD (цифровые многофункциональные диски), Blu-Ray, и т. д. Пользовательский интерфейс 105 включает в себя устройства отображения, дисплеи с сенсорным экраном, клавиатуры, кнопки и другие устройства, которые дают возможность взаимодействия пользователя с вычислительной системой. Телематический блок 104 дает возможность как проводной, так и беспроводной связи с внешними объектами через Bluetooth, сотовую систему передачи данных (например, 3G, LTE), USB, и т. д.
Исполнительные механизмы/двигатели 103 создают ощутимые результаты. Примеры исполнительных механизмов/двигателей 103 включают в себя топливные форсунки, стеклоочистители, цепи тормозных фонарей, трансмиссии, подушки безопасности, двигатели, установленные в датчики (например, двигатель, выполненный с возможностью поворачивать локальный датчик 102), машины, двигатели силовой передачи, рулевой механизм, предупреждающие о закрытых от водителя участках обзора световые сигналы, и т. д.
Локальные датчики 102 передают цифровые показания или измерения в процессоры 108. Примеры локальных датчиков 102 включают в себя датчики температуры, датчики угла поворота, датчики ремня безопасности, датчики скорости, камеры, датчики с лазерным локатором, датчики с радиолокатором, инфракрасные датчики, ультразвуковые датчики, часы, датчики влажности, датчики дождя, светочувствительные датчики, и т. д. Следует принимать во внимание, что любые из различных электронных компонентов по фиг. 1 могут включать в себя отдельные или специализированные процессоры и память. Дополнительные подробности о конструкции и операциях вычислительной системы 100, например, описаны в публикациях Miller, Prasad, Lavoie и Hu.
Фиг. 2 в целом показывает и иллюстрирует базовое транспортное средство 200, которое включает в себя вычислительную систему 100. Некоторые из локальных датчиков 102 установлены на внешней стороне базового транспортного средства 200 (другие расположены внутри транспортного средства 200). Локальный датчик 102a выполнен с возможностью выявлять объекты, движущиеся впереди транспортного средства 200. Локальный датчик 102b выполнен с возможностью выявлять объекты, движущиеся сзади транспортного средства 200, как указано задней областью 109b восприятия. Левый датчик 102c и правый датчик 102d выполнены с возможностью выполнять сходные функции для левой и правой сторон транспортного средства 200.
Как описано ранее, локальные датчики со 102a по 102d могут быть ультразвуковыми датчиками, датчиками с лазерным локатором, датчиками с радиолокатором, инфракрасными датчиками, камерами, микрофонами и любой их комбинацией, и т. д. Базовое транспортное средство 200 включает в себя множество других локальных датчиков 102, расположенных во внутренней области транспортного средства или на внешней стороне транспортного средства. Локальные датчики 102 могут включать в себя любые или все из датчиков, раскрытых в публикациях Miller, Prasad, Lavoie, D’Amato и Hu.
Следует принимать во внимание, что базовое транспортное средство 200, а точнее, процессоры 108 базового транспортного средства 200 выполнены с возможностью выполнять способы и операции, описанные в материалах настоящей заявки. В некоторых случаях, базовое транспортное средство 200 выполнено с возможностью выполнять эти функции с помощью компьютерных программ, хранимых на энергозависимых 107 и/или энергонезависимых 106 устройствах памяти вычислительной системы 100.
Один или более процессоров «выполнены с возможностью» выполнять раскрытые этап способа, блок или операцию, по меньшей мере когда по меньшей мере один из одного или более процессоров находится на оперативной связи с памятью, хранящей программно реализованную программу с управляющей программой или командами, воплощающими раскрытые этап или блок способа. Дополнительное описание того, каким образом взаимодействуют процессоры, память и программное обеспечение, фигурирует в публикации Prasad. Согласно некоторым вариантам осуществления, мобильный телефон или внешний сервер(ы) на оперативной связи с базовым транспортным средством 200 выполняют некоторые или все из способов и операций, описанных ниже.
Согласно различным вариантам осуществления, базовое транспортное средство 200 включает в себя некоторые или все из признаков транспортного средства 100a, раскрытых в публикации Prasad. Согласно различным вариантам осуществления, вычислительная система 100 включает в себя некоторые или все из признаков VCCS 102 по фиг. 2 в публикации Prasad. Согласно различным вариантам осуществления, базовое транспортное средство 200 находится на связи с некоторыми или всеми из устройств, показанных на фиг. 1 в публикации Prasad, в том числе, переносным или мобильным устройством 110, связной вышкой 116, телекоммуникационной сетью 118, сетью 120 Интернет и центром 122 обработки данных (то есть, одним или более серверов). Каждый из объектов, описанных в этой заявке (например, инфраструктура с возможностями связи, другие транспортные средства, мобильные телефоны, серверы) могут совместно использовать любые или все из признаков, описанных со ссылкой на фиг. 1 и 2.
Термин «снаряженное транспортное средство», когда используется в формуле изобретения, настоящим определен, чтобы означать: «транспортное средство, включающее в себя: электродвигатель, множество колес, источник питания и систему рулевого управления; при этом, электродвигатель передает крутящий момент на по меньшей мере одно из множества колес, тем самым, приводя в движение по меньшей мере одно из множества колес; при этом, источник питания подает энергию на электродвигатель; и при этом, система рулевого управления выполнена с возможностью управлять направлением по меньшей мере одного из множества колес». Базовое транспортное средство 200 может быть загруженным транспортным средством.
Термин «оснащенное транспортное средство», когда используется в формуле изобретения, настоящим определен, чтобы означать «транспортное средство, включающее в себя: аккумуляторную батарею, множество колес, двигатель, систему рулевого управления; при этом, двигатель передает крутящий момент на по меньшей мере одно из множества колес, тем самым, приводя в движение по меньшей мере одно из множества колес; при этом, аккумуляторная батарея является перезаряжаемой и выполнена с возможностью подавать электроэнергию на двигатель, тем самым, возбуждая двигатель; и при этом, система рулевого управления выполнена с возможностью управлять направлением по меньшей мере одного из множества колес». Базовое транспортное средство 200 может быть оснащенным транспортным средством с электрическим приводом.
Сообщение о событии по V2X
Со ссылкой на фиг. 3, базовое транспортное средство 200 выполнено с возможностью поддерживать связь с основным сервером 300 (который может быть множеством разных серверов) и первым транспортным средством 201. Базовое транспортное средство 200 поддерживает связь с основным сервером 300 с помощью технологий связи между транспортным средством и инфраструктурой (V2I). Базовое транспортное средство 200 поддерживает связь с первым транспортным средством 201 с помощью технологий связи между транспортными средствами (V2V). Первое транспортное средство 201 (которое может быть идентичным базовому транспортному средству 200) выполнено с возможностью поддерживать связь с основным сервером 300 с помощью V2I, а с базовым транспортным средством 200 с помощью V2V. V2X означает связь через тот или другой из V2V или V2I.
Технологии связи V2I включают в себя беспроводную связь по сети Интернет. Например, базовое транспортное средство 200, с помощью телематики 104, может соединяться с вышкой сотовой связи. Вышка сотовой связи может соединяться с основным сервером 300 через существующую телекоммуникационную инфраструктуру (например, подземные кабели). Технологии связи V2V включают в себя непосредственную беспроводную связь между транспортными средствами без маршрутизации через существующую телекоммуникационную инфраструктуру. Одним из известных способов связи V2V является связь DSRC (специализированная связь ближнего действия), где транспортные средства поддерживают связь непосредственно друг с другом с помощью радиосигналов ближнего действия.
Базовое транспортное средство 200 сохраняет, обновляет и применяет базовую карту 200x. Основной сервер 300 сохраняет, обновляет и применяет основную карту 300x. Первое транспортное средство 201 сохраняет, обновляет и применяет первую карту 201x. Карты 200x, 300x, 201x являются виртуальными. Хотя используется термин «карта», картам не обязательно отображаться, визуализироваться или быть видимыми пользователю. Карты могут быть объектно-ориентированными и включать в себя множество объектов, связанных с множеством атрибутов. Каждая карта может включать в себя (a) статические объекты (например, координаты/границы дорог, перекрестков) и (b) динамические объекты (например, координаты транспортных средств).
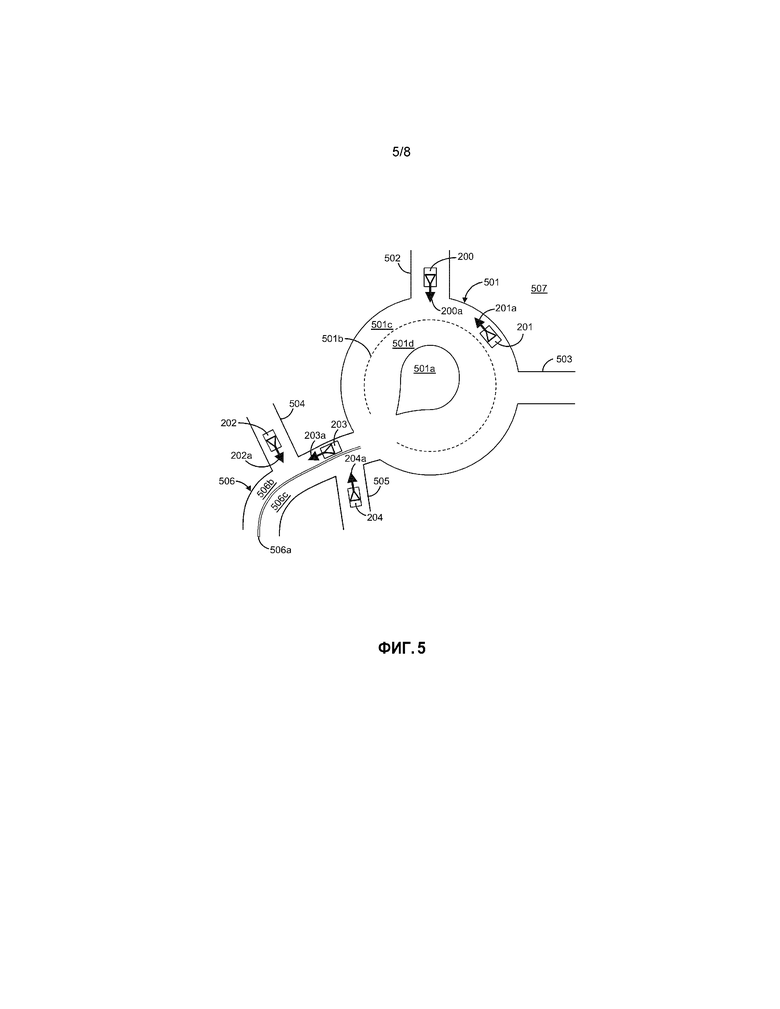
Фиг. 5 показывает визуализацию примерной карты 200x, 300x, 201x. Визуализация выполняется программным обеспечением визуализации, которое переносит объекты и связанные атрибуты на графическое устройство отображения. Дополнительное пояснение виртуальных карт фигурирует в патенте США под № 15/418,556 на Diedrich (поданным 27 января 2017 года), который настоящим включен в состав посредством ссылки во всей своей полноте. Базовое транспортное средство 200 может быть выполнено с возможностью выполнять любые или все из функций описанных в публикации Diedrich.
На фиг. 5, участок 501 дороги с круговым движением пересекает дороги 502, 503 и 506. Дорога 502 является односторонней в направлении от первого базового транспортного средства 200 к центру 501a участка дороги с круговым движением. Дорога 506 пересекает дороги 505 и 504. Участок дороги с круговым движением включает в себя полосы 501c и 501d движения, разделенные разделительной линией 501b, и непригодный для вождения центр 501a. Полосы 501c и 501d движения несут параллельный поток движения транспорта, как указано пунктирной разделительной линией 501b. Дорога 506 включает в себя полосы 506b и 506c движения. Полоса 506b движения заключает в себе движение транспорта в противоположном направлении от полосы 506c движения, что указано двойной разделительной линией 506a. Базовое транспортное средство 200 находится на дороге 502 с вектором 200a скорости (вектор скорости включает в себя скорость и направление движения). Первое транспортное средство 201 находится в полосе 501c движения участка 501 дороги с круговым движением с вектором 200b скорости. Второе транспортное средство 202 находится на дороге 504 с вектором 202a скорости. Третье транспортное средство 203 находится в полосе 506b движения дороги 506 с вектором 203a скорости. Четвертое транспортное средство 204 находится на дороге 505 с вектором 204a скорости.
Статические объекты (a) включают в себя участок 501 дороги с круговым движением, дороги 502, 503, 506 и непригодный для вождения центр 501a. Атрибуты этих статических объектов включают в себя их координаты, количество полос движения, координаты полос движения, ограничения скорости полос движения, направления движения полос движения, разрешенные повороты на каких-нибудь перекрестках, и т. д. Динамические объекты (b) включают в себя транспортные средства с 200 по 204. Атрибуты этих динамических объектов включают в себя текущие положения (например, координаты по GPS), векторы скорости (которые включают в себя направление движения), марку/модель транспортного средства, ускорение, и т. д.
Базовое транспортное средство 200 и первое транспортное средство 201 применяют свои соответственные карты 200x, 201x для формирования результатов вождения. Эти результаты вождения могут включать в себя любое из решений для вождения, описанных в публикации Diedrich, такое как планирование пути, автоматическое рулевое управление, автоматическое торможение, предупреждения об опасности столкновения, и т. д. Базовое транспортное средство 200 может применять базовую карту 200x для автономного вождения базового транспортного средства 200, так чтобы базовое транспортное средство 200 не сталкивалось ни с какими динамическими объектами и соблюдало все правила вождения.
Чтобы доходить до карт 200x, 201x, 300x, основной сервер 300 может начинать с карты уровня улиц (например, картографической службы Google Maps). Основной сервер 300 затем может извлекать статические объекты из карты уровня улиц. Основной сервер 300 дополняет карту динамическими данными, считанными внешними субъектами (например, базовым транспортным средством 200, первым транспортным средством 201, инфраструктурными датчиками (например, камерами, установленными на уличных фонарях), и т. д.). Основной сервер 300 передает основную карту 300x на базовое и первое транспортные средства 200, 201, которые затем устанавливают основную карту 300x в качестве базовой и первой карт 200x, 201x. По мере того, как транспортные средства 200, 201 распознают новые события вождения (своими локальными датчиками 102), транспортные средства 200, 201 обновляют свои карты 200x, 201x. Таким образом, со временем, динамические объекты и их свойства на базовой, первой и основной картах 200x, 201x, 300x расходятся. Среди прочего, настоящая заявка описывает способы и операции для периодического сближения или синхронизации карт 200x, 201x, 300x.
Со ссылкой на фиг. 4, базовое транспортное средство 200 регистрирует новое событие дорожного движения локальными датчиками 102 в блоке 402. Событие дорожного движения может быть положением, вектором скорости и/или ускорением динамического объекта. Событие дорожного движения, таким образом, может включать в себя новые динамические объекты и/или новые атрибуты динамических объектов. Базовое транспортное средство 200 собирает событие дорожного движения (или совокупность событий дорожного движения, распознанных в течение предопределенного временного промежутка) в блок или кадр информации. Базовое транспортное средство 200 формирует случайную последовательность из по меньшей мере 6 буквенно-цифровых символов и назначает блоку ID блока, равный случайной последовательности. Базовое транспортное средство 200 дополнительно прикладывает временную метку к блоку.
В блоке 404 базовое транспортное средство 200 определяет, имеется ли в распоряжении соединение V2I (например, имеется ли в распоряжении соединение сети Интернет, и/или способно ли базовое транспортное средство 200 поддерживать связь с основным сервером 300 на данный момент). Если соединение V2I имеется в распоряжении, то базовое транспортное средство 200 передает блок (в том числе, ID и временную метку) на основной сервер 300. Основной сервер 300 может обновлять основную карту 300x, чтобы отражала объекты и/или атрибуты в блоке. Для определения, следует ли обновить основную карту 300x на основании блока, основной сервер 300 может выполнять операцию уместности (описанную ниже). В ответ на блок, основной сервер 300 может отправлять квитанцию подтверждения на базовое транспортное средство 200. Квитанция подтверждения может быть временной меткой, иметь уникальный ID квитанции, и описывать, был ли блок одобрен (то есть, был ли применен к основной карте 300x) или отклонен.
При передаче на основной сервер 300 или по квитанции подтверждения с основного сервера 300, базовое транспортное средство 200 дополняет блок (который все еще хранится в базовом транспортном средстве 200) флажковым признаком обновления по V2I со значением истина. В блоке 406 базовое транспортное средство 200 сообщает блок, в том числе, ID блока, флажковый признак обновления по V2I со значением истина и временную метку через V2V, таким образом, возможно побуждая первое транспортное средство 201 обновлять первую карту 201x таким же образом, как основную карту 300x.
Если в блоке 404 соединения V2I нет в распоряжении (например, базовое транспортное средство 200 теряет соединение сотовой связи, или базовое транспортное средство 200 определяет, что основной сервер 300 отключен от сети), то базовое транспортное средство 200 дополняет блок информации флажковым признаком обновления по V2I со значением ложь. В блоке 406 базовое транспортное средство 200 отправляет блок, в том числе, ID блока, временную метку и флажковый признак обновления по V2I со значением ложь через V2V на первое транспортное средство 201. Следует принимать во внимание, что обмен информацией/широковещательные передачи/сообщения по V2V, описанные в материалах настоящей заявки, могут одноадресно передаваться из точки в точку между базовым транспортным средством 200 и целевым транспортным средством или могут быть универсальной широковещательной передачей из базового транспортного средства 200, которая принимается любым транспортным средством в пределах дальности действия широковещательной передачи.
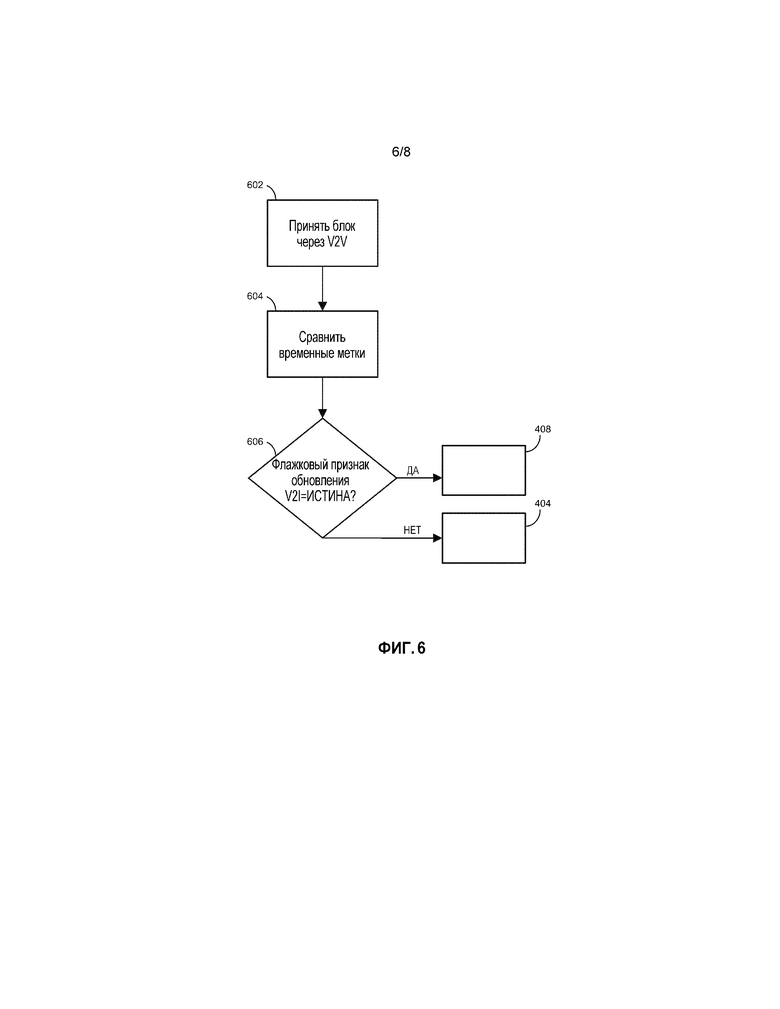
Со ссылкой на фиг. 6, базовое транспортное средство 200 принимает блок через V2V в блоке 602 блок-схемы (например, с первого транспортного средства 201, которое выполнило этапы по фиг. 4). В блоке 604 базовое транспортное средство 200 сравнивает временную метку блока с временной меткой самой последней синхронизации или сближения с основным сервером 300. Как описано выше, основной сервер 300 периодически отправляет основную карту 300x (или по меньшей мере уместные ее части на основании местоположения принимающего транспортного средства) на транспортные средства через V2I (например, дважды в секунду). Транспортные средства могут замещать карты 200x, 201x транспортного средства самой последней основной картой 300x. Транспортные средства могут замещать только части карт 200x, 201x транспортного средства самой последней основной картой 300x на основании описанной ниже операции уместности.
В блоке 604 базовое транспортное средство 200 определяет, имеет ли базовая карта 200x или блок более позднюю временную метку. Если базовая карта 200x имеет более позднюю временную метку, то блок игнорируется. Если блок имеет более позднюю временную метку, то базовое транспортное средство 200 определяет, имеет ли блок флажковый признак обновления по V2I со значением истина или ложь, в блоке 606. Блок 604 может включать в себя описанные ниже операции уместности. Если флажковый признак обновления по V2I имеет значение ложь, то базовое транспортное средство 200 переходит к блоку 404 по фиг. 4. Если флажковый признак обновления по V2I имеет значение истина, то базовое транспортное средство 200 переходит к блоку 408 по фиг. 4.
Далее будут описаны описанные выше операции уместности. Как описано ранее, блок может включать в себя атрибуты множества объектов (например, вектор скорости базового транспортного средства 200 и вектор скорости первого транспортного средства 201). По соображениям, которые станут очевидными, каждый блок может быть разбит на подблоки. Каждый подблок может включать в себя случайно сформированный ID, временную метку. Каждый подблок может по существу сообщать атрибуты одиночного объекта.
Например, базовое транспортное средство 200 является одним объектом, имеющим множество атрибутов (также упоминаемых как свойства). Первое транспортное средство 201 является одним объектом, имеющим множество атрибутов. Таким образом, вышеприведенные субъекты (например, базовое транспортное средство 200, первое транспортное средство 201, основной сервер 300) после приема блока могут распаковывать блок на его составляющие подблоки. Субъект затем может сравнивать временную метку подблока (который посвящен одиночному объекту) с самой поздней временной меткой, соответствующей тому же самому объекту, на карте субъекта.
Субъект затем может одобрять подблоки, имеющие новую временную метку (то есть, временную метку, более позднюю, чем временная метка того же самого объекта на карте субъекта), и отклонять подблоки, имеющие старую временную метку (то есть, временную метку, более раннюю, чем временная метка того же самого объекта, на карте субъекта). Например, первое транспортное средство 201 передает, через V2I, блок, имеющий: (a) первый подблок с атрибутами базового транспортного средства 200 (положением, вектором скорости, ускорением) и (b) второй подблок с атрибутами первого транспортного средства 201 (положением, вектором скорости, ускорением). Временная метка первого подблока, соответствующая самому последнему разу, когда считывались атрибуты (например, моменту времени последнего измерения датчиком, которое вносило вклад в какие-нибудь из атрибутов), имеет значение 3:01:01 после полудня. Временная метка второго подблока, соответствующего самому последнему разу, когда считывались атрибуты, имеет значение 3:01:03 после полудня. Основная карта 300x имеет самую позднюю временную метку для базового транспортного средства 200 в 3:01:05 после полудня. Основная карта 300x, таким образом, отбрасывает первый подблок. Основная карта 300x имеет самую позднюю временную метку для первого транспортного средства 201 в 3:01:02 после полудня. Основная карта 300x, таким образом, одобряет второй подблок.
Такой же процесс может применяться, когда основной сервер 300 выдает обновления на базовое и первое транспортные средства 200, 201. Каждое обновление может включать в себя атрибуты объектов в пределах предопределенного расстояния от принимающего транспортного средства (например, в пределах радиуса двух миль от базового транспортного средства 200). Каждый объект в обновлении имеет временную метку. Принимающее транспортное средство затем сравнивает временную метку каждого объекта в обновлении с временной меткой того же самого объекта на карте принимающего транспортного средства. Принимающее транспортное средство одобряет части обновления, которые являются новыми, и отклоняет части обновления, которые являются старыми.
Хотя блоки описывались ранее в качестве включающих в себя информацию о динамических объектах, блоки также могут включать в себя информацию о статических объектах. Основной сервер 300 может быть выполнен с возможностью выдавать обновления о динамических объектах с первым промежутком и выдавать обновления о статических объектах со вторым промежутком. Первый промежуток может соотноситься обратно пропорционально со скоростью принимающего транспортного средства (то есть, при более высоких скоростях, обновления приходят чаще). Второй промежуток может отрицательно соотноситься со скоростью принимающего транспортного средства, но устанавливаться в качестве некоторого кратного значения первого промежутка. Например, основной сервер 300 может отправлять обновления динамических объектов каждые 0,5 секунды и отправлять обновления статических объектов каждые 2 секунды. Таким образом, один из четырех блоков, широковещательно передаваемых основным сервером 300, будет включать в себя динамические объекты и статические объекты, тем временем, три из четырех блоков, широковещательно передаваемых основным сервером, включают в себя только динамические объекты.
Транспортные средства 200, 201 могут распознавать атрибуты статических объектов (например, координаты полос движения) в дополнение к атрибутам динамических объектов. Транспортные средства 200, 201 могут сравнивать атрибуты статических объектов с атрибутами на карте 200x, 201x транспортного средства, и включать атрибуты статических объектов в передаваемые блоки, только когда считанные статические атрибуты отличаются (например, отличаются на предопределенную величину) от статических атрибутов, постоянно находящихся на карте 200x, 201x транспортного средства.
Основной сервер 300 может быть выполнен с возможностью осмотрительно относиться к обновлению атрибутов статических объектов. По приему подблока с атрибутами статического объекта, основной сервер 300 сравнивает принятые атрибуты с атрибутами на основной карте 300x. Основной сервер 300 затем определяет, привело ли сравнение к (a) отсутствию различия или к (b) различию.
Если сравнение дает в результате (a) отсутствие различия, то основной сервер 300 игнорирует атрибуты подблока. Если сравнение дает в результате (b) различие, то основной сервер сохраняет подблок и определяет убедительность передающего транспортного средства.
Основной сервер 300 может определять убедительность, запрашивая такие переданные транспортным средством подблоки о считанных статических объектах в течение по меньшей мере предопределенного периода времени (даже если считанные атрибуты статических объектов не отличаются от отображенных на карте атрибутов статических объектов). Основной сервер 300 затем сравнивает атрибуты в переданных подблоках с такими же атрибутами (то есть, атрибутами того же самого объекта) на основной карте 300x. Если атрибуты совместимы, то основной сервер 300 назначает положительную убедительность транспортному средству. Если атрибуты несовместимы, то основной сервер 300 назначает отрицательную убедительность транспортному средству. Если более чем одно транспортное средство помечено в качестве имеющего отрицательную убедительность после сообщения новых атрибутов одного и того же объекта в течение предопределенного интервала времени, то основной сервер 300 может применять другой алгоритм для определения убедительности.
Если транспортное средство имеет положительную убедительность, то основной сервер 300 выдает размывающее обновление на основную карту 300x. Размывающее обновление побуждает транспортное средство (i) считывать и незамедлительно сообщать атрибуты размытого объекта и (ii) снижать свою уверенность в атрибутах размытого объекта. Основная карта 300x устраняет размытость и возвращается к размытому ранее объекту по приему достаточного количества следующих друг за другом подблоков (например, одного подблока), совместимых (то есть, в достаточной мере совместимых) с размытой ранее основной картой 300x, снабженных временной меткой после применения размытости и приходящих от транспортного средства, иного чем исходное транспортное средство. Основной сервер 300 корректирует основную карту 300x, чтобы отражала различие, и устраняет размытость по приему достаточного количества последующих подблоков, совместимых с сообщенным различием.
Базовое и первое транспортные средства 200, 201 могут выполнять одинаковые операции уместности по приему подблоков, соответствующих статическим объектам из какого-нибудь субъекта, иного чем базовое транспортное средство 300.
Запрашивание по V2V с многочисленными переприемами
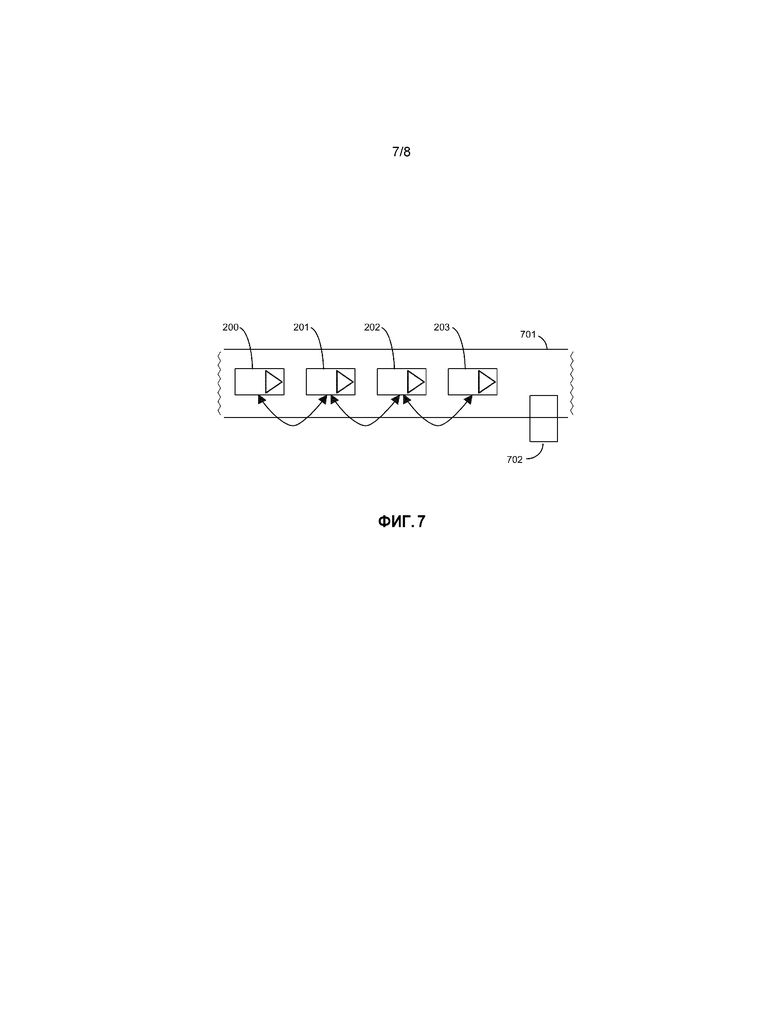
Со ссылкой на фиг. 7, базовая карта 200x включает в себя препятствие 702. Препятствие может быть припаркованным транспортным средством, преграждающим дорогу 701. Базовое транспортное средство 200 также утратило соединение V2I с основным сервером 300. На основании присутствия препятствия 702 и/или потери соединения V2I с основным сервером 300, базовое транспортное средство 200 запрашивает информацию о предстоящей дороге. Базовое транспортное средство 200 особенно интересуется состоянием препятствия 702. Локальные датчики 102 базового транспортного средства 200, первого транспортного средства 201 и второго транспортного средства 202 находятся вне дальности распознавания препятствия 702, тем временем, локальные датчики 102 третьего транспортного средства 203 (которое, подобно первому транспортному средству 201 и второму транспортному средству 202, может быть идентичным базовому транспортному средству 200) находятся в пределах дальности распознавания препятствия 702.
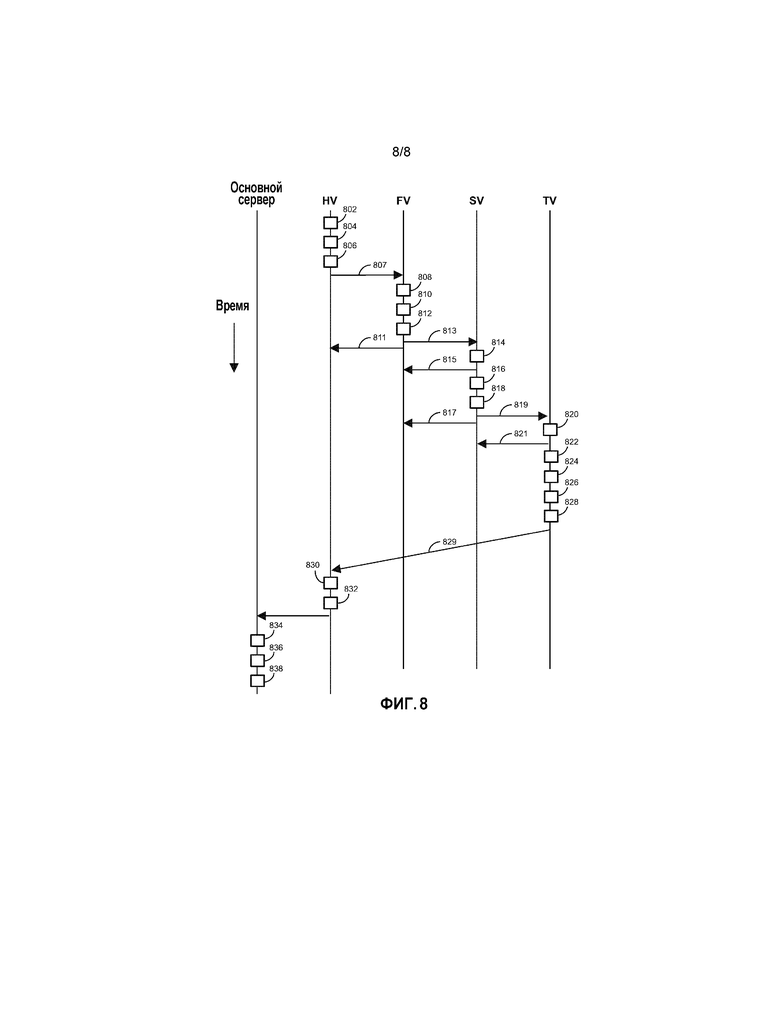
Со ссылкой на фиг. 8, базовое транспортное средство 200 определяет, что соединение V2I было потеряно в блоке 802. В блоке 804 базовое транспортное средство 200 идентифицирует интересующую зону (например, все динамические объекты в пределах некоторого набора координат, здесь, в пределах набора координат вокруг препятствия 702) на основании базовой карты 200x. В блоке 806, базовое транспортное средство 200 подготавливает сообщение, включающее в себя одно или более из: (a) интересующей зоны, (b) запланированного маршрута базового транспортного средства 200 (который может включать в себя текущие и/или будущие положения, векторы скорости и ускорения), (c) идентичности базового транспортного средства 200, и (d) вида и/или разрешения требуемой информации об интересующей зоне. Базовое транспортное средство 200 широковещательно передает сообщение через V2V на 807.
В блоке 808 первое транспортное средство 201 принимает широковещательно переданное сообщение и выдает подтверждение приема (не показано) на базовое транспортное средство 200. В блоке 810 первое транспортное средство 201 определяет, находится ли оно на дальности действия распознавания интересующей зоны. Если первое транспортное средство 201 находится в пределах дальности распознавания, то первое транспортное средство 201 выполняет операции, описанные ниже со ссылкой на третье транспортное средство 203. Если нет, на основании (b), первое транспортное средство 201 оценивает текущее положение базового транспортного средства 200. Первое транспортное средство 201 сравнивает оцененное текущее положение базового транспортного средства 200 с известным положением первого транспортного средства 201 и интересующей зоны. Если первое транспортное средство 201 находится ближе к интересующей зоне, чем планируется, что должно находиться базовое транспортное средство 200, то первое транспортное средство 201 переходит к блоку 812. В блоке 812 первое транспортное средство 201 добавляет (c-1) в сообщение [идентичность первого транспортного средства 201]. Первое транспортное средство 201 пересылает сообщение с помощью V2V на 813 и информирует базовое транспортное средство о пересылке на 811. Перед пересылкой сообщения, первое транспортное средство 201 применяет операции выбора пересылки. Во время этих операций, первое транспортное средство 201 определяет все оснащенные V2V (то есть, наделенные возможностями связи) транспортные средства в пределах дальности действия широковещательной передачи первого транспортного средства 201. Первое транспортное средство 201 выбирает транспортное средство, которое (i) ближе всего находится к интересующей зоне от определенных транспортных средств и/или (ii) следует в направлении интересующей зоны. Первое транспортное средство 201 широковещательно передает сообщение на выбранное транспортное средство.
В блоке 814 второе транспортное средство 202 принимает широковещательно переданное сообщение. На основании приема, второе транспортное средство 202 выдает подтверждение приема на первое транспортное средство 201 в блоке 815 блок-схемы. В блоке 816 второе транспортное средство 202 определяет, находится ли оно на дальности действия распознавания интересующей зоны. Если второе транспортное средство 202 находится в пределах дальности распознавания, то второе транспортное средство 202 выполняет операции, описанные ниже со ссылкой на третье транспортное средство 203. Если нет, на основании (b), второе транспортное средство 202 оценивает текущее положение базового транспортного средства 200. Второе транспортное средство 202 сравнивает оцененное текущее положение базового транспортного средства 200 с известным положением второго транспортного средства 202 и интересующей зоны. Если второе транспортное средство 202 находится ближе к интересующей зоне, чем планируется, что должно находиться базовое транспортное средство 200, то второе транспортное средство 202 переходит к блоку 818. В блоке 818 второе транспортное средство 202 добавляет (c-2) в сообщение. Второе транспортное средство 202 пересылает сообщение на 819 и информирует первое транспортное средство 201 о пересылке на 817. Перед пересылкой сообщения, второе транспортное средство 202 применяет операции выбора пересылки.
В блоке 820 третье транспортное средство 203 принимает сообщение. Третье транспортное средство 203 выдает подтверждение приема на второе транспортное средство 202 на 821. Третье транспортное средство 203 определяет, что находится в пределах дальности распознавания препятствия (или будет находиться в пределах дальности действия распознавания препятствия в течение предопределенного периода времени на основании вектора скорости, ускорения, пути, и т. д.). В блоке 822 третье транспортное средство 203 распознает интересующую зону на основании (a) и (d). В блоке 824 третье транспортное средство 203 добавляет (c-3) в сообщение. В блоке 826 третье транспортное средство 203 добавляет считанные данные (которые могут быть объектами и их атрибутами) в сообщение и удаляет (b) и (d). В блоке 828 третье транспортное средство 203 оценивает текущее местоположение базового транспортного средства 200 на основании (b). Третье транспортное средство 203 пересылает сообщение и информирует второе транспортное средство 203 о пересылке (не показано). Перед пересылкой сообщения, третье транспортное средство 203 применяет операции выбора пересылки, но выбирает транспортное средство, ближайшее к оцененному текущему местоположению базового транспортного средства 200 и/или транспортного средства, которое следует в направлении оцененного текущего местоположения базового транспортного средства 200.
Процесс повторяется до тех пор, пока сообщение не возвращается на базовое транспортное средство 200 в блоке 830. Хотя сообщение может возвращаться на базовое транспортное средство 200 через первое транспортное средство 201 и второе транспортное средство 202, такой порядок необязателен. Сообщение может выполнять иной путь 829 обратно на базовое транспортное средство 200, чем выполняло сообщение на третье транспортное средство 203 (например, через четвертое и пятое транспортные средства). Если какому-нибудь осуществляющему широковещательную передачу транспортному средству не удается принять подтверждение приема, то транспортное средство может повторно широковещательно передавать на другое транспортное средство, выбранное с помощью новой итерации операций выбора пересылки.
В блоке 830 сообщение будет включать в себя идентичности каждого промежуточного транспортного средства и считывающего транспортного средства. В блоке 832 базовое транспортное средство 200 обновляет базовую карту 200x на основании данных, считанных датчиками третьего транспортного средства 203. Базовое транспортное средство 200 передает идентичности промежуточных транспортных средств и считывающего транспортного средства на основной сервер 300 при повторном соединении с основным сервером 300.
В блоке 834 основной сервер 300 записывает в дебет счета базового транспортного средства сумму денег или подлежащих погашению баллов на основании (i) исходного расстояния базового транспортного средства 200 от интересующей зоны и (ii) уровня качества и/или количества считывания, изначально запрошенного базовым транспортным средством 200. В блоке 836 основной сервер 300 кредитует счет деньгами или подлежащими погашению баллами, связанный с третьим транспортным средством 203 (то есть, транспортным средством, которое выполняет считывание), на основании (ii). В блоке 838 основной сервер 300 кредитует счета (деньгами или подлежащими погашению баллами) каждого промежуточного транспортного средства (здесь, первого транспортного средства 201 и второго транспортного средства 202) на сумму, основанную на (i). Базовое транспортное средство 200 может быть выполнено так, что, чтобы функция запрашивания с многочисленными переприемами была действующей на базовом транспортном средстве 200, базовое транспортное средство 200 должно пытаться установить соединение с основным сервером 300 с предопределенными промежутками, чтобы давать возможность дебетовых и кредитовых операций.
Основной сервер 300 присоединен к финансовому серверу (не показан), который периодически переводит деньги между счетами (например, банковскими счетами, кредитными картами, и т. д.) на основании описанных выше дебетовых и кредитовых операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИРТУАЛЬНАЯ КАРТА ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2693400C2 |
| СПОСОБ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ОКАЗАНИЯ СОДЕЙСТВИЯ ВОДИТЕЛЯМ ПРИ СМЕНЕ ПОЛОС ДВИЖЕНИЯ НА ПРОЕЗЖЕЙ ЧАСТИ ДОРОГИ | 2018 |
|
RU2719101C2 |
| ВЫБОР РЕСУРСА ДЛЯ ОБМЕНА ДАННЫМИ ТРАНСПОРТНЫМ СРЕДСТВОМ С ТРАНСПОРТНЫМ СРЕДСТВОМ ИЛИ ИНФРАСТРУКТУРОЙ (V2X) | 2017 |
|
RU2733780C2 |
| СОЗДАНИЕ СТРУКТУРИРОВАННЫХ КАРТОГРАФИЧЕСКИХ ДАННЫХ С ПОМОЩЬЮ ДАТЧИКОВ ТРАНСПОРТНОГО СРЕДСТВА И МАССИВОВ КАМЕР | 2020 |
|
RU2772620C1 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2668350C9 |
| Система совместно используемых транспортных средств | 2015 |
|
RU2696640C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ПОСТАНОВКИ НА СТОЯНКУ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2697743C2 |
| ВЫЯВЛЕНИЕ ГЛУБИНЫ ВОДЫ ДЛЯ ПЛАНИРОВАНИЯ И ОТСЛЕЖИВАНИЯ МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2686159C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ И СИСТЕМА ДЛЯ ПЛАНИРОВАНИЯ РЕЖИМОВ ТРАНСПОРТНОГО СРЕДСТВА С ИСПОЛЬЗОВАНИЕМ ИЗУЧЕННЫХ ПРЕДПОЧТЕНИЙ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2683902C2 |
Группа изобретений относится к базовому транспортному средству и способу управления базовым транспортным средством. Базовое транспортное средство включает в себя: двигатель(и), датчики, процессор(ы), выполненный(ые) с возможностью: упаковывать считанные датчиками данные в первый блок, определять, является ли соединение между транспортным средством и инфраструктурой действующим или недействующим. При определении, что соединение является действующим - дополнять блок флажковым признаком со значением ИСТИНА и передавать блок через соединение между транспортным средством и инфраструктурой. При определении, что соединение является недействующим - дополнять блок флажковым признаком со значением ЛОЖЬ и передавать блок через соединение между транспортным средством. Обеспечивается трансляция распознанных событий между серверами и между транспортными средствами с помощью V2X. 2 н. и 18 з.п. ф-лы, 8 ил.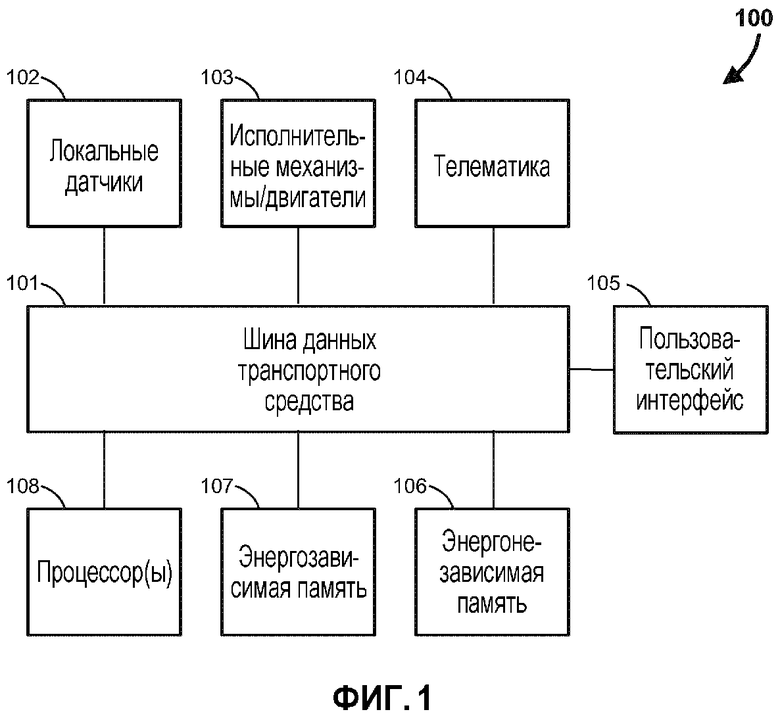
1. Базовое транспортное средство, содержащее:
датчик для выявления события дорожного движения; и
процессор(ы), выполненный(ые) с возможностью:
упаковывать событие дорожного движения в блок;
определять, является ли соединение между транспортным средством и инфраструктурой (V2I) действующим или недействующим;
если действующее, дополнять блок флажковым признаком со значением ИСТИНА и передавать блок посредством соединения V2I и соединения между транспортными средствами (V2V); и если недействующее, дополнять блок флажковым признаком со значением ЛОЖЬ и передавать блок посредством соединения V2V.
2. Базовое транспортное средство по п. 1, в котором процессор(ы) выполнен(ы) с возможностью:
принимать второй блок от другого транспортного средства посредством соединения V2V;
определять, включает ли в себя второй блок флажковый признак со значением ИСТИНА или флажковый признак со значением ЛОЖЬ;
если второй блок включает в себя флажковый признак со значением ЛОЖЬ, передавать второй блок на сервер посредством V2I соединения; и
если второй блок включает в себя флажковый признак со значением ИСТИНА, не передавать второй блок на сервер посредством V2I соединения.
3. Базовое транспортное средство по п. 2, в котором процессор(ы) выполнен(ы) с возможностью:
сравнивать временную метку блока второго блока с временной меткой карты виртуальной карты базового транспортного средства перед определением, включает ли в себя второй блок флажковый признак со значением ИСТИНА или флажковый признак со значением ЛОЖЬ.
4. Базовое транспортное средство по п. 3, в котором процессор(ы) выполнен(ы) с возможностью:
отбрасывать по меньшей мере часть второго блока, если временная метка блока предшествует временной метке карты.
5. Базовое транспортное средство по п. 4, в котором процессор(ы) выполнен(ы) с возможностью направлять второй блок посредством соединения V2V.
6. Базовое транспортное средство по п. 1, в котором процессор(ы) выполнен(ы) с возможностью:
распаковывать принятое сообщение в подблоки, причем каждый подблок включает в себя атрибуты одиночного объекта и временную метку; и
сопоставлять каждый подблок с сохраненным ранее объектом, постоянно находящимся в памяти.
7. Базовое транспортное средство по п. 6, в котором каждый сохраненный ранее объект включает в себя временную метку, и процессор(ы) выполнен(ы) с возможностью:
сравнивать временные метки сохраненных ранее объектов с временными метками подблоков;
помечать каждый подблок в качестве нового или старого на основании сравнения;
отбрасывать старые подблоки;
обновлять атрибуты сохраненных ранее объектов на основании атрибутов новых подблоков.
8. Базовое транспортное средство по п. 1, в котором
событие дорожного движения включает в себя динамический объект и атрибуты динамического объекта; и
процессор(ы) выполнен(ы) с возможностью:
включать в себя ID блока и временную метку в блоке.
9. Базовое транспортное средство по п. 8, в котором блок включает в себя запрос на выполнение сканирования датчиком динамического объекта.
10. Базовое транспортное средство по п. 9, в котором процессор(ы) выполнен(ы) с возможностью:
выбирать внешнее транспортное средство из множества внешних транспортных средств в пределах дальности действия широковещательной передачи между транспортными средствами у базового транспортного средства; и
направлять запрос на выбранное внешнее транспортное средство.
11. Базовое транспортное средство по п. 1, в котором процессор(ы) выполнен(ы) с возможностью:
обновлять виртуальную карту базового транспортного средства событием дорожного движения.
12. Базовое транспортное средство по п. 11, в котором процессор(ы) выполнен(ы) с возможностью автономного вождения базового транспортного средства, основываясь на виртуальной карте.
13. Базовое транспортное средство по п. 11, в котором процессор(ы) выполнен(ы) с возможностью:
обеспечивать сервер возможностью обновлять виртуальную карту посредством V2I соединения.
14. Базовое транспортное средство по п. 1, в котором флажковый признак со значением ИСТИНА дает указание другому транспортному средству не передавать блок на сервер и флажковый признак со значением ЛОЖЬ дает указание другому транспортному средству передавать блок на сервер.
15. Способ управления базовым транспортным средством, который содержит память, датчик(и), процессор(ы), причем способ содержит этапы, на которых:
выявляют событие дорожного движения, используя датчик(и);
обновляют, используя процессор(ы), виртуальную карту, которая хранится в памяти, событием дорожного движения;
упаковывают событие дорожного движения в первый блок;
определяют, является ли соединение между транспортным средством и инфраструктурой (V2I) действующим или недействующим;
если действующее, дополняют блок флажковым признаком со значением ИСТИНА и передают блок посредством соединения V2I и соединения между транспортными средствами (V2V); и если недействующее, дополняют блок флажковым признаком со значением ЛОЖЬ и передают блок посредством соединения V2V.
16. Способ по п. 15, дополнительно содержащий этапы, на которых:
принимают второй блок от другого транспортного средства посредством соединения V2V;
определяют, включает ли в себя второй блок флажковый признак со значением ИСТИНА или флажковый признак со значением ЛОЖЬ;
если второй блок включает в себя флажковый признак со значением ЛОЖЬ, передают второй блок на сервер посредством V2I соединения; и
если второй блок включает в себя флажковый признак со значением ИСТИНА, не передают второй блок на сервер посредством V2I соединения.
17. Способ по п. 16, дополнительно содержащий этапы, на которых:
сравнивают временную метку блока второго блока с временной меткой карты виртуальной карты базового транспортного средства перед определением, включает ли в себя второй блок флажковый признак со значением ИСТИНА или флажковый признак со значением ЛОЖЬ.
18. Способ по п. 17, дополнительно содержащий этап, на котором отбрасывают по меньшей мере часть второго блока, если временная метка блока предшествует временной метке карты.
19. Способ по п. 18, дополнительно содержащий этап, на котором направляют второй блок посредством соединения V2V.
20. Способ по п. 15, дополнительно содержащий этап, на котором автономно управляют базовым транспортным средством, основываясь на виртуальной карте.
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

