Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления движением и к устройству управления движением для управления движением транспортного средства.
Уровень техники
[0002] Традиционно известны устройства управления движением для автоматического выполнения смены полосы движения транспортного средства. Такое устройство управления движением может использовать известную технологию определения того, существует или нет пространство для смены полосы движения в смежной полосе движения относительно полосы движения, в которой движется транспортное средство, и выполнения смены полосы движения, когда пространство для смены полосы движения существует в смежной полосе движения (например, патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. WO2010/082353
Сущность изобретения
Задачи, решаемые изобретением
[0004] В вышеописанной традиционной технологии, даже когда другое транспортное средство движется в смежной полосе движения относительно полосы движения, в которой движется рассматриваемое транспортное средство, и другое транспортное средство с очень большой вероятностью должно сменять полосу движения на следующую полосу движения, смежную со смежной полосой движения (следующую смежную полосу движения), рассматриваемому транспортному средству не разрешается сменять полосу движения до тех пор, пока другое транспортное средство фактически не сменит полосу движения на следующую смежную полосу движения, и пространство для смены полосы движения не обнаружится в смежной полосе движения. Как следствие, рассматриваемое транспортное средство может не иметь возможность плавно сменять полосу движения.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ управления движением и устройство управления движением, которые обеспечивают плавную смену полосы движения.
Средство решения задач
[0006] Согласно аспекту настоящего изобретения, вышеуказанная проблема разрешается посредством предоставления способа управления движением, осуществляемого посредством устройства управления движением. Устройство управления движением содержит первый детектор, выполненный с возможностью обнаруживать помеху рядом с рассматриваемым транспортным средством, движущимся в первой полосе движения, и второй детектор, выполненный с возможностью обнаруживать вторую полосу движения, смежную с первой полосой движения. Устройство управления движением задает первый диапазон в целевой позиции для смены полосы движения во второй полосе движения. Первый диапазон имеет размер, равный или больший размера, который рассматриваемое транспортное средство занимает на поверхности дороги. Устройство управления движением обнаруживает диапазон во второй полосе движения в качестве второго диапазона. Диапазон во второй полосе движения расположен сбоку от рассматриваемого транспортного средства, и помеха отсутствует в диапазоне во второй полосе движения. Устройство управления движением разрешает рассматриваемому транспортному средству сменять полосу движения, когда второй диапазон включает в себя первый диапазон. Способ управления движением включает в себя обнаружение диапазона в третьей полосе движения, следующей и смежной со второй полосой движения, в качестве третьего диапазона. Диапазон в третьей полосе движения расположен сбоку от рассматриваемого транспортного средства, и помеха отсутствует в диапазоне в третьей полосе движения. Способ движения дополнительно включает в себя уменьшение первого диапазона или увеличение второго диапазона, когда третий диапазон имеет размер, равный или больший предварительно определенного диапазона, по сравнению с тем, когда третий диапазон имеет размер, меньший предварительно определенного диапазона.
Преимущества изобретения
[0007] Согласно настоящему изобретению, третий диапазон, в котором не существуют помехи, обнаруживается в третьей полосе движения, следующей и смежной со второй полосой движения, и когда третий диапазон имеет размер, равный или больший предварительно определенного диапазона, первый диапазон уменьшается, или второй диапазон увеличивается, по сравнению с тем, когда третий диапазон имеет размер, меньший предварительно определенного диапазона. Рассматриваемое транспортное средство в силу этого может инициировать смену полосы движения до того, как другое транспортное средство, движущееся во второй полосе движения, фактически сменяет полосу движения на третью полосу движения, и пространство для смены полосы движения рассматриваемого транспортного средства за счет этого обнаруживается во второй полосе движения. Таким образом, смена полосы движения может плавно выполняться.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства управления движением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является видом, иллюстрирующим пример таблицы, используемой для определения окружения движения.
Фиг. 3 является блок-схемой последовательности операций способа (часть 1), иллюстрирующей процесс управления сменой полосы движения согласно первому варианту осуществления настоящего изобретения.
Фиг. 4 является блок-схемой последовательности операций способа (часть 2), иллюстрирующей процесс управления сменой полосы движения согласно первому варианту осуществления настоящего изобретения.
Фиг. 5 является блок-схемой последовательности операций способа (часть 3), иллюстрирующей процесс управления сменой полосы движения согласно первому варианту осуществления настоящего изобретения.
Фиг. 6A является набором видов (часть 1) для описания способов обнаружения диапазона для перестроения.
Фиг. 6B является набором видов (часть 2) для описания способов обнаружения диапазона для перестроения.
Фиг. 6C является набором видов (часть 3) для описания способов обнаружения диапазона для перестроения.
Фиг. 7 является видом для описания способа задания целевой позиции для смены полосы движения.
Фиг. 8 является набором видов для описания способа оценки позиции другого транспортного средства после предварительно определенного времени.
Фиг. 9 является набором видов для описания способа определения того, становится или нет диапазон для перестроения небольшим.
Фиг. 10 иллюстрирует пример экрана, отображаемого на дисплее устройства выдачи оповещений.
Фиг. 11 является набором видов для описания способа коррекции требуемого диапазона на основе уровня необходимости смены полосы движения.
Фиг. 12 является набором видов для описания способа коррекции требуемого диапазона на основе ситуации следующей смежной полосы движения.
Фиг. 13A является набором видов для описания способов коррекции требуемого диапазона на основе позиции движения находящегося в смежной полосе движения транспортного средства в направлении ширины дороги.
Фиг. 13B является набором видов для описания способов коррекции требуемого диапазона на основе позиции движения находящегося в смежной полосе движения транспортного средства в направлении ширины дороги.
Фиг. 14A является набором видов для описания способов коррекции требуемого диапазона на основе состояния подсвечивания указателей поворота находящегося в смежной полосе движения транспортного средства.
Фиг. 14B является набором видов для описания способов коррекции требуемого диапазона на основе состояния подсвечивания указателей поворота находящегося в смежной полосе движения транспортного средства.
Фиг. 15 является видом для описания способа коррекции диапазона для перестроения на основе уровня необходимости смены полосы движения.
Фиг. 16 является видом для описания способа коррекции диапазона для перестроения на основе ситуации следующей смежной полосы движения.
Фиг. 17A является набором видов для описания способов коррекции диапазона для перестроения на основе позиции движения находящегося в смежной полосе движения транспортного средства в направлении ширины дороги.
Фиг. 17B является набором видов для описания способов коррекции диапазона для перестроения на основе позиции движения находящегося в смежной полосе движения транспортного средства в направлении ширины дороги.
Фиг. 18A является набором видов для описания способов коррекции диапазона для перестроения на основе состояния подсвечивания указателей поворота находящегося в смежной полосе движения транспортного средства.
Фиг. 18B является набором видов для описания способов коррекции диапазона для перестроения на основе состояния подсвечивания указателей поворота находящегося в смежной полосе движения транспортного средства.
Фиг. 19 является набором видов для описания способа определения того, должна или нет выполняться смена полосы движения.
Фиг. 20 является набором видов для описания позиционной взаимосвязи между разделительными линиями для перестроения и рассматриваемым транспортным средством в направлении ширины дороги.
Фиг. 21 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления сменой полосы движения согласно второму варианту осуществления настоящего изобретения.
Режимы осуществления изобретения
[0009] Далее описаны один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, примерно иллюстрируется и описывается устройство управления движением, оборудованное в транспортном средстве.
[0010] Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 100 управления движением согласно настоящему варианту осуществления. Как проиллюстрировано на фиг. 1, устройство 100 управления движением согласно настоящему варианту осуществления имеет набор датчиков 110, устройство 120 обнаружения позиции рассматриваемого транспортного средства, картографическую базу 130 данных, бортовое оборудование 140, устройство 150 выдачи оповещений, устройство 160 ввода, устройство 170 связи, устройство 180 управления приведением в движение и устройство 190 управления. Эти устройства соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0011] Датчики 110 обнаруживают состояние движения рассматриваемого транспортного средства. Примеры датчиков 110 включают в себя камеру переднего вида, которая захватывает изображения впереди рассматриваемого транспортного средства, камеру заднего вида, которая захватывает изображения позади рассматриваемого транспортного средства, передний радар, который обнаруживает помехи впереди рассматриваемого транспортного средства, задний радар, который обнаруживает помехи позади рассматриваемого транспортного средства, боковые радары, которые обнаруживают помехи, существующие по бокам от рассматриваемого транспортного средства, датчик скорости транспортного средства, который определяет скорость транспортного средства для рассматриваемого транспортного средства, и бортовую камеру, которая захватывает изображения водителя. Датчики 110 могут представляться посредством одного из вышеописанных различных датчиков либо также могут быть сконфигурированы с помощью комбинации двух или более датчиков. Результаты обнаружения датчиков 110 выводятся в устройство 190 управления.
[0012] Устройство 120 обнаружения позиции рассматриваемого транспортного средства состоит из GPS-модуля, гиродатчика, датчика скорости транспортного средства и других необходимых компонентов. Устройство 120 обнаружения позиции рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые из множества спутников связи с использованием GPS-модуля, чтобы периодически получать позиционную информацию целевого транспортного средства (рассматриваемого транспортного средства), и обнаруживает текущую позицию целевого транспортного средства на основе полученной позиционной информации целевого транспортного средства, информации варьирования угла, полученной из гиродатчика, и скорости транспортного средства, полученной из датчика скорости транспортного средства. Позиционная информация целевого транспортного средства, обнаруженная посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, выводится в устройство 190 управления.
[0013] Картографическая база 130 данных сохраняет картографическую информацию, которая включает в себя позиционную информацию различных инфраструктурных объектов и конкретных точек. В частности, картографическая база 130 данных сохраняет позиционную информацию точек слияния, точек разветвления, пунктов взимания платы за проезд, позиций, в которых уменьшается число полос движения, зон обслуживания (SA)/зон парковки (PA) и т.д. вместе с картографической информацией. Устройство 190 управления может обращаться к картографической информации, сохраненной в картографической базе данных.
[0014] Бортовое оборудование 140 включает в себя различные модули, оснащенные в транспортном средстве, и может управляться водителем. Примеры такого бортового оборудования включают в себя рулевой механизм, педаль акселератора, педаль тормоза, навигационное устройство, аудиоустройство, кондиционер, переключатель громкой связи, окна с сервоприводом стекла, стеклоочистители, фары, проблесковые сигналы и гудок. Когда водитель выполняет операцию бортового оборудования 140, его информация выводится в устройство 190 управления.
[0015] Устройство 150 выдачи оповещений, например, может представлять собой такое устройство, как дисплей навигационного устройства, дисплей, включенный в зеркало заднего вида, дисплей, включенный в приборный блок, дисплей на лобовом стекле, проецируемый на ветровое стекло, и динамик аудиоустройства. Устройство 150 выдачи оповещений оповещает информацию оповещения, которая описывается ниже, водителю под управлением посредством устройства 190 управления.
[0016] Устройство 160 ввода, например, может представлять собой такое устройство, как переключатель круговой ручки регулировки и сенсорная панель, расположенная на экране отображения, которые обеспечивают возможность ввода посредством ручного управления водителем, и микрофон, который обеспечивает возможность ввода посредством голоса водителя. В настоящем варианте осуществления, водитель может управлять устройством 160 ввода, чтобы за счет этого вводить информацию ответа в ответ на оповещаемую информацию, которая оповещается посредством устройства 150 выдачи оповещений. Например, в настоящем варианте осуществления, переключатели проблесковых сигналов или другие бортовые устройства также могут использоваться в качестве устройства 160 ввода. Более конкретно, устройство 160 ввода может иметь такую конфигурацию, в которой водитель включает переключатель проблескового сигнала, чтобы за счет этого вводить разрешение смены полосы движения в ответ на запрос в отношении того, следует или нет выполнять автоматически смену полосы движения. Информация ответа, вводимая через устройство 160 ввода, выводится в устройство 190 управления.
[0017] Устройство 170 связи осуществляет связь с оборудованием связи, расположенным за пределами транспортного средства. Например, устройство 170 связи выполняет связь между транспортными средствами с другим транспортным средством, выполняет связь между транспортным средством и дорожной инфраструктурой с оборудованием, предоставленным на обочине дороги, или выполняет беспроводную связь с информационным сервером, предоставленным за пределами транспортного средства, и в силу этого может получать различные элементы информации из внешнего оборудования. Информация, полученная посредством устройства связи, выводится в устройство 190 управления.
[0018] Устройство 180 управления приведением в движение управляет движением рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство едет за движущимся впереди транспортным средством (эта операция в дальнейшем называется "управлением движением в режиме "ехать за""), устройство 180 управления приведением в движение управляет работой приводного механизма (которая включает в себя работу двигателя внутреннего сгорания в случае автомобиля с двигателем и работу электромотора в случае электромобиля и дополнительно включает в себя распределение крутящего момента для двигателя внутреннего сгорания и электромотора в случае гибридного автомобиля) и операцией торможения, чтобы достигать ускорения, замедления и скорости транспортного средства таким образом, что расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством может поддерживаться равным постоянному расстоянию. Когда рассматриваемое транспортное средство выполняет смену полосы движения, к примеру, обгон движущегося впереди транспортного средства (эта операция в дальнейшем называется "управлением сменой полосы движения"), устройство 180 управления приведением в движение управляет работой актуатора рулевого управления, чтобы управлять работой колес, и в силу этого выполняет управление при повороте рассматриваемого транспортного средства. Устройство 180 управления приведением в движение управляет движением рассматриваемого транспортного средства в соответствии с командами из устройства 190 управления, которое описывается ниже. Другие известные способы также могут использоваться в качестве способа управления движением посредством устройства 180 управления приведением в движение.
[0019] Устройство 190 управления состоит из постоянного запоминающего устройства (ROM), которое сохраняет программы для управления движением рассматриваемого транспортного средства, центрального процессора (CPU), который выполняет программы, сохраненные в ROM, и оперативного запоминающего устройства (RAM), которое служит в качестве доступного устройства хранения данных. В качестве замены или в дополнение к CPU, также может использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п.
[0020] Устройство 190 управления выполняет программы, сохраненные в ROM, с использованием CPU, чтобы за счет этого достигать функции получения информации по движению для того, чтобы получать информацию относительно состояния движения рассматриваемого транспортного средства, функции определения окружения движения для того, чтобы определять окружение движения рассматриваемого транспортного средства, функции управления движением для того, чтобы управлять движением рассматриваемого транспортного средства, и функции управления сменой полосы движения для того, чтобы управлять сменой полосы движения через определение в отношении того, должна или нет выполняться смена полосы движения. Ниже описывается каждая функция устройства 190 управления.
[0021] Устройство 190 управления использует функцию получения информации по движению для того, чтобы получать информацию по движению относительно состояния движения рассматриваемого транспортного средства. Например, устройство 190 управления может использовать функцию получения информации по движению для того, чтобы получать информацию внешних изображений вокруг транспортного средства, захваченную посредством камеры переднего вида и камеры заднего вида, и/или результаты обнаружения посредством переднего радара, заднего радара и боковых радаров в качестве информации по движению. Устройство 190 управления также может использовать функцию получения информации по движению для того, чтобы получать информацию скорости транспортного средства для рассматриваемого транспортного средства, обнаруженную посредством датчика скорости транспортного средства, и/или информацию изображений лица водителя, захваченную посредством бортовой камеры, в качестве информации по движению.
[0022] Устройство 190 управления дополнительно может использовать функцию получения информации по движению для того, чтобы получать информацию относительно текущей позиции рассматриваемого транспортного средства из устройства 120 обнаружения позиции рассматриваемого транспортного средства в качестве информации по движению, а также получать позиционную информацию точек слияния, точек разветвления, пунктов взимания платы за проезд, позиций, в которых уменьшается число полос движения, зон обслуживания (SA)/зон парковки (PA) и т.д. из картографической базы 130 данных в качестве информации по движению. Помимо этого, устройство 190 управления может использовать функцию получения информации по движению для того, чтобы получать информацию относительно операции бортового оборудования 140 водителем из бортового оборудования 140 в качестве информации по движению.
[0023] Устройство 190 управления использует функцию определения окружения движения для того, чтобы обращаться к таблице, сохраненной в ROM устройства 190 управления, для того, чтобы определять окружение движения, в котором движется рассматриваемое транспортное средство. Фиг. 2 является видом, иллюстрирующим пример таблицы, используемой для того, чтобы определять окружение движения. Как проиллюстрировано на фиг. 2, таблица сохраняет окружение движения, подходящее для смены полосы движения, и его условия определения для каждого окружения движения. Устройство 190 управления использует функцию определения окружения движения для того, чтобы обращаться к таблице, проиллюстрированной на фиг. 2, чтобы определять то, представляет собой окружение движения рассматриваемого транспортного средства или нет окружение движения, подходящее для смены полосы движения.
[0024] Например, в примере, проиллюстрированном на фиг. 2, условие определения для "окружения настигания движущегося впереди транспортного средства" задается посредством четырех условий: условие "обнаружения движущегося впереди транспортного средства", условие "скорость транспортного средства для движущегося впереди транспортного средства < скорость транспортного средства для рассматриваемого транспортного средства", условие "достижения движущегося впереди транспортного средства в течение предварительно определенного времени" и такое условие, что "направление смены полосы движения не подчиняется условию запрета на смену полосы движения". Устройство 190 управления использует функцию определения окружения движения для того, чтобы определять то, удовлетворяет или нет рассматриваемое транспортное средство вышеуказанным условиям, например, на основе результатов обнаружения посредством камеры переднего вида и/или переднего радара, скорости транспортного средства для рассматриваемого транспортного средства, обнаруженной посредством датчика скорости транспортного средства, позиционной информации рассматриваемого транспортного средства и т.д. Когда вышеуказанные условия удовлетворяются, функция определения окружения движения используется для того, чтобы определять то, что рассматриваемое транспортное средство находится в "окружении настигания движущегося впереди транспортного средства". Аналогично, для всех других окружений движения, зарегистрированных в таблице определения окружения, функция определения окружения движения используется для того, чтобы определять то, удовлетворяется или нет каждое условие определения.
[0025] Примеры условия запрета на смену полосы движения включают в себя такое условие, что "рассматриваемое транспортное средство движется в области запрета на смену полосы движения", такое условие, что "помеха существует в направлении смены полосы движения", такое условие, что "рассматриваемое транспортное средство должно переезжать через центральную линию (центральную линию дороги)", и такое условие, что "рассматриваемое транспортное средство должно въезжать на обочину дороги или переезжать через конец дороги". На дороге, на которой экстренная остановка разрешается на обочине дороги и т.п. в "окружении аварийной эвакуации", такое условие, что "рассматриваемое транспортное средство должно въезжать на обочину дороги или переезжать через конец дороги", может разрешаться в "окружении аварийной эвакуации". В таблице, проиллюстрированной на фиг. 2, ниже описываются уровень необходимости смены полосы движения, временной предел и направление смены полосы движения.
[0026] Когда окружение движения рассматриваемого транспортного средства соответствует множеству окружений движения, устройство 190 управления может использовать функцию определения окружения движения для того, чтобы определять окружение движения, имеющее более высокий уровень необходимости смены полосы движения, в качестве окружения движения рассматриваемого транспортного средства. Например, предполагается, что, в примере, проиллюстрированном на фиг. 2, окружение движения рассматриваемого транспортного средства соответствует "окружению настигания движущегося впереди транспортного средства" и "окружению переноса полосы движения к пункту назначения". В этом случае также предполагается то, что уровень X1 необходимости смены полосы движения в "окружении настигания движущегося впереди транспортного средства" ниже уровня X8 необходимости смены полосы движения в "окружении переноса полосы движения к пункту назначения" (X1 < X8). В этом случае, устройство 190 управления может использовать функцию определения окружения движения для того, чтобы определять "окружение переноса полосы движения к пункту назначения" с более высоким уровнем необходимости смены полосы движения, в качестве окружения движения рассматриваемого транспортного средства.
[0027] Устройство 190 управления использует функцию управления движением для того, чтобы управлять движением рассматриваемого транспортного средства. Например, устройство 190 управления использует функцию управления движением для того, чтобы обнаруживать разделительные линии полосы движения, в которой движется рассматриваемое транспортное средство (также в дальнейшем называемой "полосой движения рассматриваемого транспортного средства"), на основе результатов обнаружения датчиков 110 и выполнять управление удержанием на полосе движения для того, чтобы управлять позицией движения рассматриваемого транспортного средства в направлении ширины дороги. В этом случае, устройство 190 управления может использовать функцию управления движением для того, чтобы обеспечивать возможность устройству 180 управления приведением в движение управлять работой актуатора рулевого управления и т.п. таким образом, что рассматриваемое транспортное средство движется в соответствующей позиции движения. Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления движением для того, чтобы выполнять управление движением в режиме "ехать за", чтобы автоматически ехать за движущимся впереди транспортным средством с определенным расстоянием от движущегося впереди транспортного средства. В этом случае, устройство 190 управления может использовать функцию управления движением для того, чтобы обеспечивать возможность устройству 180 управления приведением в движение управлять работой приводного механизма, такого как двигатель и тормоз, таким образом, что рассматриваемое транспортное средство движется с постоянным расстоянием между рассматриваемым транспортным средством и движущимся впереди транспортным средством. В нижеприведенном описании, описывается управление автоматическим движением, включающее в себя управление удержанием на полосе движения и управление движением в режиме "ехать за".
[0028] Устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, следует или нет выполнять смену полосы движения, на основе окружения движения рассматриваемого транспортного средства и/или информации относительно помех, существующих рядом с рассматриваемым транспортным средством. Когда выполняется определение в отношении того, чтобы выполнять смену полосы движения, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы обеспечивать возможность устройству 180 управления приведением в движение управлять работой актуатора рулевого управления. Ниже описываются подробности способа управления сменой полосы движения с использованием функции управления сменой полосы движения.
[0029] Ниже описывается процесс управления сменой полосы движения согласно первому варианту осуществления со ссылкой на фиг. 3-5. Фиг. 3-5 являются блок-схемами последовательности операций способа, иллюстрирующими процесс управления сменой полосы движения согласно первому варианту осуществления. Следует понимать, что процесс управления сменой полосы движения, описанный ниже, выполняется посредством устройства 190 управления. Ниже приводится описание при условии, что устройство 190 управления использует функцию управления движением для того, чтобы выполнять управление движением в режиме "ехать за" для рассматриваемого транспортного средства таким образом, чтобы ехать за движущимся впереди транспортным средством.
[0030] Во-первых, на этапе S101, устройство 190 управления использует функцию получения информации по движению для того, чтобы получать информацию по движению относительно состояния движения рассматриваемого транспортного средства. На этапе S102, устройство 190 управления использует функцию определения окружения движения для того, чтобы определять окружение движения рассматриваемого транспортного средства на основе информации по движению, полученной на этапе S101.
[0031] На этапе S103, устройство 190 управления использует функцию определения окружения движения для того, чтобы определять то, представляет собой окружение движения рассматриваемого транспортного средства, определенное на этапе S102, или нет окружение движения, подходящее для смены полосы движения. В частности, когда окружение движения рассматриваемого транспортного средства представляет собой любое из окружений движения, проиллюстрированных на фиг. 2, функция определения окружения движения используется для того, чтобы определять то, что окружение движения рассматриваемого транспортного средства представляет собой окружение движения, подходящее для смены полосы движения. Когда окружение движения рассматриваемого транспортного средства не представляет собой окружение движения, подходящее для смены полосы движения, процедура возвращается к этапу S101, с которого повторяется определение окружения движения. Когда окружение движения рассматриваемого транспортного средства представляет собой окружение движения, подходящее для смены полосы движения, процедура переходит к этапу S104.
[0032] На этапе S104, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать диапазон для перестроения. В настоящем варианте осуществления, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать помехи, существующие рядом с рассматриваемым транспортным средством, на основе информации внешних изображений вокруг транспортного средства, захваченных посредством камеры переднего вида и камеры заднего вида, и/или информации по движению, включающей в себя результаты обнаружения посредством переднего радара, заднего радара и боковых радаров. Устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать диапазон, который расположен сбоку от рассматриваемого транспортного средства, и в котором помехи не существуют, в качестве диапазона для перестроения. Диапазон для перестроения означает относительный диапазон со ссылкой на позицию движения, когда рассматриваемое транспортное средство движется с текущей скоростью. Когда другое транспортное средство, существующее рядом с рассматриваемым транспортным средством, движется по прямой вперед со скоростью, идентичной скорости рассматриваемого транспортного средства, в силу этого диапазон для перестроения не варьируется. "Сторона рассматриваемого транспортного средства" означает диапазон, в котором позиция сбоку от рассматриваемого транспортного средства может приниматься в качестве целевой позиции для смены полосы движения, когда рассматриваемое транспортное средство сменяет полосу движения (эта целевая позиция также представляет собой относительную позицию со ссылкой на позицию движения, когда рассматриваемое транспортное средство движется с текущей скоростью), и этот диапазон (к примеру, направление, размер и угол) может надлежащим образом задаваться. Ниже описываются способы обнаружения диапазона для перестроения со ссылкой на фиг. 6A-6C. Фиг. 6A-6C являются видами для описания диапазонов для перестроения.
[0033] В примерном окружении, проиллюстрированном на фиг. 6A(A), другие транспортные средства в качестве помех не присутствуют в смежной полосе движения относительно полосы движения рассматриваемого транспортного средства. Устройство 190 управления в силу этого может использовать функцию управления сменой полосы движения для того, чтобы обнаруживать смежную полосу движения в качестве диапазона для перестроения. Следует понимать, что обочины дороги исключаются из диапазона для перестроения, поскольку обочины дороги по существу находятся в пределах диапазонов, в которых не может выполняться смена полосы движения. Тем не менее, когда окружение движения рассматриваемого транспортного средства представляет собой "окружение аварийной эвакуации", на которой экстренная остановка и т.п. разрешается на обочине дороги, обочина дороги может быть включена в диапазон для перестроения (здесь и в дальнейшем).
[0034] В примерном окружении, проиллюстрированном на фиг. 6A(B), другие транспортные средства в качестве помех существуют в смежной полосе движения относительно полосы движения рассматриваемого транспортного средства. Тем не менее, существует диапазон, в котором другие транспортные средства не существуют между другим транспортным средством, расположенным впереди рассматриваемого транспортного средства, и другим транспортным средством, расположенным позади рассматриваемого транспортного средства. Устройство 190 управления в силу этого может использовать функцию управления сменой полосы движения для того, чтобы обнаруживать этот диапазон в качестве диапазона для перестроения. В примерном окружении, проиллюстрированном на фиг. 6A(C), смежная полоса движения включает в себя диапазон, в котором другие транспортные средства не существуют, как указано в окружении, проиллюстрированном на фиг. 6A(B), и также в следующей полосе движения, смежной со смежной полосой движения (также в дальнейшем называемой "следующей смежной полосой движения"), существует диапазон, в котором другие транспортные средства не существуют между другим транспортным средством, расположенным впереди, и другим транспортным средством, расположенным позади. В этом случае, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы обнаруживать диапазон, в котором другие транспортные средства не существуют в смежной полосе движения, и диапазон, в котором другие транспортные средства не существуют в следующей смежной полосе движения, в качестве диапазонов для перестроения.
[0035] Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы обнаруживать диапазон для перестроения, посредством исключения диапазона, такого как участок проведения дорожных работ, как проиллюстрировано на фиг. 6B (D), в котором рассматриваемое транспортное средство не может двигаться, из диапазона для перестроения. Примеры такого диапазона, в котором не может двигаться рассматриваемое транспортное средство, включают в себя диапазон, в котором другое транспортное средство паркуется или останавливается, и диапазон, в котором запрещается движение транспортных средств вследствие правил дорожного движения и т.д., в дополнение к участку проведения дорожных работ. Когда, как проиллюстрировано на фиг. 6B (D), диапазон, в котором рассматриваемое транспортное средство не может двигаться вследствие участка проведения дорожных работ и т.п., занимает половину или более смежной полосы движения (половину или более в направлении ширины дороги), например, оставшаяся менее чем половина диапазона не может обнаруживаться в качестве диапазона для перестроения.
[0036] Когда, как проиллюстрировано на фиг. 6B (E), другие транспортные средства движутся последовательно в смежной полосе движения, и пространство для смены полосы движения не существует в смежной полосе движения, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы определять то, что не может обнаруживаться диапазон для перестроения.
[0037] Примерное окружение, проиллюстрированное на фиг. 6C (F), представляет собой окружение, в котором рассматриваемое транспортное средство движется по дороге, на которой смена полосы движения дороги со смежной полосы движения на следующую смежную полосу движения запрещается. На такой дороге, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать диапазон, в котором помехи не существуют в смежной полосе движения, на которую возможна смена полосы движения, в качестве диапазона для перестроения. Таким образом, в этом случае, следующая смежная полоса движения, на которую не может выполняться смена полосы движения, не обнаруживается в качестве диапазона для перестроения. Примерное окружение, проиллюстрированное на фиг. 6C (G), представляет собой окружение, в котором рассматриваемое транспортное средство движется на дороге, имеющей встречные полосы движения. На такой дороге, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать диапазон для перестроения только в полосе движения в направлении, идентичном направлению движения рассматриваемого транспортного средства. Таким образом, в этом случае, диапазон для перестроения не обнаруживается во встречных полосах движения.
[0038] В настоящем варианте осуществления, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать диапазон для перестроения в направлении, из числа направлений вправо и влево, которое является подходящим для смены полосы движения в окружении движения рассматриваемого транспортного средства. В настоящем варианте осуществления, направление, подходящее для смены полосы движения в каждом окружении движения, предварительно сохраняется в таблице, проиллюстрированной на фиг. 2. Устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обращаться к таблице, проиллюстрированной на фиг. 2, чтобы получать информацию относительно "направления смены полосы движения" в окружении движения рассматриваемого транспортного средства. Например, когда окружение движения рассматриваемого транспортного средства представляет собой "окружение настигания движущегося впереди транспортного средства", устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обращаться к таблице по фиг. 2, чтобы получать "направление к стороне полосы обгона" в качестве "направления смены полосы движения". Затем устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать диапазон для перестроения в "направлении смены полосы движения". Например, когда окружение движения рассматриваемого транспортного средства представляет собой "окружение настигания движущегося впереди транспортного средства", устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать диапазон для перестроения в "направлении к стороне полосы обгона", т.е. в направлении к полосе движения, в которой рекомендуется движение обгоняющего транспортного средства (например, в направлении вправо в примерах, проиллюстрированных на фиг. 6A-6D (фиг. 6C)). Таким образом, функция управления сменой полосы движения может использоваться для того, чтобы обнаруживать диапазон для перестроения в направлении смены полосы движения, подходящей для окружения движения рассматриваемого транспортного средства.
[0039] Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы обнаруживать диапазон для перестроения сбоку от рассматриваемого транспортного средства. Например, даже когда обнаруживается диапазон, в котором помехи не существуют в смежной полосе движения, если диапазон является отделенным от текущей позиции рассматриваемого транспортного средства на определенное расстояние или более и расположен позади или впереди рассматриваемого транспортного средства, может быть затруднительным выполнять смену полосы движения на такой диапазон, который в силу этого не обнаруживается в качестве диапазона для перестроения.
[0040] На этапе S105, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы задавать целевую позицию для смены полосы движения. Например, как проиллюстрировано на фиг. 7, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы задавать позицию, которая находится в диапазоне для перестроения в смежной полосе движения, обнаруженном на этапе S104, и которая сдвигается назад от позиции рассматриваемого транспортного средства на небольшое расстояние, в качестве целевой позиции для смены полосы движения (например, позиции транспортного средства, указываемой посредством пунктирной линии на фиг. 7). Целевая позиция для смены полосы движения представляет собой относительную позицию относительно позиции, в которой движется рассматриваемое транспортное средство. Таким образом, при условии, что позиция, когда рассматриваемое транспортное средство движется с текущей скоростью без изменения скорости, представляет собой исходную позицию, позиция, расположенная поперечно позади исходной позиции на небольшое расстояние, может задаваться в качестве целевой позиции для смены полосы движения. Это обеспечивает возможность рассматриваемому транспортному средству сменять полосу движения на смежную полосу движения без ускорения рассматриваемого транспортного средства, когда рассматриваемое транспортное средство перемещается в целевую позицию для смены полосы движения. Фиг. 7 является видом для описания способа задания целевой позиции для смены полосы движения.
[0041] Устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы задавать целевую позицию для смены полосы движения с учетом простоты смены полосы движения, к примеру, ситуации, в которой диапазон для перестроения в смежной полосе движения включает в себя диапазон, в который рассматриваемое транспортное средство может перемещаться, и ситуации, в которой другое транспортное средство, которое может въезжать в диапазон для перестроения, не существует рядом с рассматриваемым транспортным средством. Например, когда другое транспортное средство, существующее вокруг диапазона для перестроения, подсвечивает указатели поворота к диапазону для перестроения и/или движется при отклонении к стороне диапазона для перестроения, функция управления сменой полосы движения может использоваться для того, чтобы определять то, что другое транспортное средство может въезжать в диапазон для перестроения. В этом случае, другая позиция в диапазоне для перестроения, в которую с меньшей вероятностью должно въезжать другое транспортное средство, может задаваться в качестве целевой позиции. В вышеуказанном примерном случае, целевая позиция для смены полосы движения задается равной позиции, расположенной позади рассматриваемого транспортного средства в диапазоне для перестроения в смежной полосе движения. В альтернативном варианте осуществления, целевая позиция для смены полосы движения может задаваться равной позиции, расположенной впереди рассматриваемого транспортного средства в диапазоне для перестроения в смежной полосе движения. В альтернативном варианте осуществления, этап S105 может включать в себя задание целевого намеченного пути для смены полосы движения вместо задания целевой позиции для смены полосы движения.
[0042] На этапе S106, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы оценивать требуемое время T1 для смены полосы движения. Например, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы оценивать время, требуемое для перемещения рассматриваемого транспортного средства из текущей позиции в целевую позицию для смены полосы движения, в качестве требуемого времени T1 на основе скорости транспортного средства и/или ускорения рассматриваемого транспортного средства.
[0043] На этапе S107, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы оценивать диапазон для перестроения после предварительно определенного времени T1, оцененного на этапе S106. В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы оценивать позицию движения после предварительно определенного времени T1 другого транспортного средства, существующего рядом с рассматриваемым транспортным средством, на основе скорости и ускорения транспортного средства для другого транспортного средства. Например, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы многократно обнаруживать позиционную информацию другого транспортного средства, чтобы за счет этого измерять вектор v0 скорости, вектор a0 ускорения и позиционный вектор p0 другого транспортного средства, как проиллюстрировано на фиг. 8(A).
[0044] Как проиллюстрировано на фиг. 8(A), когда направление движения рассматриваемого транспортного средства располагается вдоль оси X, а направление ширины дороги располагается вдоль оси Y, вектор v0 скорости другого транспортного средства представляется посредством следующего уравнения (1):
v0=vx0i+vy0j ... (1)
где vx0 представляет компонент скорости в направлении по оси X вектора скорости другого транспортного средства, и vy0 представляет компонент скорости в направлении по оси Y вектора скорости другого транспортного средства. В вышеприведенном уравнении (1), i представляет единичный вектор в направлении по оси X, и j представляет единичный вектор в направлении по оси Y (это применимо и к следующим уравнениям (2), (3) и (6)).
[0045] Вектор a0 ускорения другого транспортного средства может получаться так, как представлено посредством следующего уравнения (2), тогда как позиционный вектор p0 другого транспортного средства может получаться так, как представлено посредством следующего уравнения (3).
a0=ax0i+ay0j ... (2)
p0=px0i+py0j ... (3)
В вышеприведенном уравнении (2), ax0 представляет компонент ускорения в направлении по оси X вектора ускорения другого транспортного средства, и ay0 представляет компонент ускорения в направлении по оси Y вектора ускорения другого транспортного средства. В вышеприведенном уравнении (3), px0 представляет позиционный компонент в направлении по оси X позиционного вектора другого транспортного средства, и py0 представляет позиционный компонент в направлении по оси Y позиционного вектора другого транспортного средства.
[0046] Затем устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы вычислять позиционный вектор pT1 после предварительно определенного времени T1 другого транспортного средства, как проиллюстрировано на фиг. 8(B). В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы вычислять позиционный вектор pT1 после предварительно определенного времени T1 другого транспортного средства на основе следующих уравнений (4)-(6).
pxT1=px0+vx0T1+1/2(ax0T1)2 ... (4)
pyT1=py0+vy0T1+1/2(ay0T1)2 ... (5)
pT1=pxT1i+pyT1j ... (6)
В вышеприведенных уравнениях (4) и (5), pxT1 представляет позиционный компонент в направлении по оси X позиционного вектора pT1 после предварительно определенного времени T1 другого транспортного средства, pyT1 представляет позиционный компонент в направлении по оси Y позиционного вектора pT1 после предварительно определенного времени T1 другого транспортного средства, vx0T1 представляет скорость перемещения в направлении по оси X другого транспортного средства после предварительно определенного времени T1, vy0T1 представляет скорость перемещения в направлении по оси Y другого транспортного средства после предварительно определенного времени T1, ax0T1 представляет ускорение в направлении по оси X другого транспортного средства после предварительно определенного времени T1, и ay0T1 представляет ускорение в направлении по оси Y другого транспортного средства после предварительно определенного времени T1.
[0047] Устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы оценивать позиции после предварительно определенного времени T1 всех других транспортных средств, существующих рядом с рассматриваемым транспортным средством. Затем устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы оценивать диапазон для перестроения после предварительно определенного времени T1 на основе позиций после предварительно определенного времени T1 других транспортных средств. Устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы оценивать диапазон для перестроения после предварительно определенного времени T1 с учетом ситуации регулирования полосы движения после предварительно определенного времени T1, наличия помех на дороге, присутствия или отсутствия преграды в смежной полосе движения и наличия участка, такого как участок проведения дорожных работ, в который не может перемещаться рассматриваемое транспортное средство. Устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы оценивать диапазон для перестроения после предварительно определенного времени T1, аналогично этапу S104.
[0048] На этапе S108, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы оценивать то, становится или нет диапазон для перестроения небольшим в смежной полосе движения после предварительно определенного времени T1, на основе текущего диапазона для перестроения, обнаруженного на этапе S104, и диапазона для перестроения после предварительно определенного времени T1, оцененного на этапе S107. Фиг. 9 является набором видов для описания способа определения того, становится или нет диапазон для перестроения небольшим.
[0049] В примере, проиллюстрированном на фиг. 9, предполагается, например, что текущий диапазон для перестроения представляет собой диапазон для перестроения, проиллюстрированный в (A), в то время как диапазон для перестроения после предварительно определенного времени T1 представляет собой диапазон для перестроения, проиллюстрированный в (B). В этом случае, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы сравнивать текущий диапазон для перестроения (A) и диапазон для перестроения после предварительно определенного времени T1 (B), чтобы определять то, становится или нет диапазон для перестроения в смежной полосе движения небольшим после предварительно определенного времени T1. В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы перекрывать текущий диапазон для перестроения (A) и диапазона для перестроения после предварительно определенного времени T1 (B) и оценивать то, что диапазон для перестроения становится небольшим в смежной полосе движения, когда размер текущего диапазона для перестроения в смежной полосе движения превышает размер диапазона для перестроения после предварительно определенного времени T1 в смежной полосе движения. После этого, когда оценивается то, что диапазон для перестроения в смежной полосе движения становится небольшим после предварительно определенного времени T1, процедура переходит к этапу S109, на котором оповещается информация оповещения в отношении того, что диапазон для перестроения становится небольшим после предварительно определенного времени T1. Например, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы оповещать аварийный сигнал относительно того, что диапазон для перестроения становится небольшим после предварительно определенного времени T1, с использованием дисплея и/или динамика устройства 150 выдачи оповещений.
[0050] На этапе S108, устройство 190 управления также использует функцию управления сменой полосы движения для того, чтобы сравнивать текущий диапазон для перестроения (A) и диапазон для перестроения после предварительно определенного времени T1 (B), чтобы указывать исчезающие диапазоны. Исчезающие диапазоны означают диапазоны, которые должны исчезать из диапазона для перестроения после предварительно определенного времени T1, как проиллюстрировано на фиг. 9(C), т.е. диапазоны, которые включены в текущий диапазон для перестроения (A), но не должны быть включены в диапазон для перестроения после предварительно определенного времени T1 (B). Помимо этого, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы сравнивать текущий диапазон для перестроения (A) и диапазон для перестроения после предварительно определенного времени T1 (B), чтобы указывать дополнительный диапазон. Дополнительный диапазон означает диапазон, который должен добавляться в диапазон для перестроения после предварительно определенного времени T1, как проиллюстрировано на фиг. 9(C), т.е. диапазон, который не включен в текущий диапазон для перестроения (A), но должен быть включен в диапазон для перестроения после предварительно определенного времени T1 (B).
[0051] После этого, когда указывается исчезающий диапазон или дополнительный диапазон, устройство 190 управления может использовать функцию управления сменой полосы движения на этапе S109, чтобы оповещать информацию оповещения, которая включает в себя информацию относительно исчезающего диапазона или дополнительного диапазона, водителю. Например, в окружении, проиллюстрированном на фиг. 9(C), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы отображать исчезающие диапазоны и дополнительный диапазон на дисплее устройства 150 выдачи оповещений в различных формах для отображения, как проиллюстрировано на фиг. 10. Это обеспечивает возможность водителю надлежащим образом воспринимать исчезающие диапазоны и дополнительный диапазон. Фиг. 10 является видом, иллюстрирующим пример информации оповещения, отображаемой на дисплее устройства 150 выдачи оповещений.
[0052] Устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы оповещать информацию оповещения в отношении того, что диапазон для перестроения становится небольшим, только тогда, когда размер диапазона для перестроения должен становиться небольшим после предварительно определенного времени T1 как предварительно определенный диапазон или более. Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы оповещать относительно исчезающего диапазона и/или дополнительного диапазона, когда размер исчезающего диапазона и/или дополнительного диапазона не меньше предварительно определенного размера. Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы изменять форму для отображения исчезающего диапазона или форму для отображения диапазона для перестроения после предварительно определенного времени T1 в соответствии с размером исчезающего диапазона. Например, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы изменять форму для отображения исчезающего диапазона или форму для отображения диапазона для перестроения после предварительно определенного времени T1 между случаем, в котором размер исчезающего диапазона составляет предварительно определенный диапазон или более, и случаем, в котором размер исчезающего диапазона меньше предварительно определенного диапазона. В примере, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы отображать исчезающий диапазон или диапазон для перестроения после предварительно определенного времени T1 в зеленом цвете и т.п., когда размер исчезающего диапазона меньше предварительно определенного диапазона, и отображать исчезающий диапазон или диапазон для перестроения после предварительно определенного времени T1 в красном цвете и т.п. с помощью выделения, когда размер исчезающего диапазона составляет предварительно определенный диапазон или более. Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы отображать исчезающий диапазон или диапазон для перестроения после предварительно определенного времени T1 с помощью мигания, когда размер исчезающего диапазона составляет предварительно определенный диапазон или более. Помимо этого или альтернативно, когда размер исчезающего диапазона составляет предварительно определенный диапазон или более, лампа аварийной сигнализации, предоставленная в индикаторе, может быть выполнена с возможностью подсвечиваться. Помимо этого или альтернативно, при условии, что устройство 150 выдачи оповещений включает в себя динамик, динамик может быть выполнен с возможностью выводить звук с тоном и/или уровнем громкости, которые привлекают внимание водителя, когда размер исчезающего диапазона составляет предварительно определенный диапазон или более, по сравнению с тем, когда размер исчезающего диапазона меньше предварительно определенного диапазона. Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы изменять форму для отображения исчезающего диапазона в соответствии с темпом, с которым диапазон для перестроения становится небольшим. Например, когда темп, с которым диапазон для перестроения становится небольшим, составляет предварительно определенный темп или более, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы отображать исчезающий диапазон или диапазон для перестроения после предварительно определенного времени T1 с помощью выделения, к примеру, в красном цвете, и с помощью мигания.
[0053] На этапе S110, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы получать информацию относительно требуемого диапазона. Требуемый диапазон означает диапазон, имеющий размер, необходимый для рассматриваемого транспортного средства, чтобы сменять полосу движения, или диапазон, имеющий размер, который, по меньшей мере, равен или выше размера, который рассматриваемое транспортное средство занимает на поверхности дороги. Хотя подробности описываются ниже, в настоящем варианте осуществления, когда требуемый диапазон задается в целевой позиции для смены полосы движения, и диапазон для перестроения в смежной полосе движения включает в себя требуемый диапазон, выполняется определение в отношении того, что пространство, соответствующее требуемому диапазону, существует в диапазоне для перестроения в смежной полосе движения, и смена полосы движения разрешается. В настоящем варианте осуществления, запоминающее устройство устройства 190 управления сохраняет информацию, включающую в себя форму и размер требуемого диапазона, и функция управления сменой полосы движения может использоваться для того, чтобы получать информацию относительно требуемого диапазона из запоминающего устройства в устройстве 190 управления.
[0054] На этапе S111, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы корректировать требуемый диапазон, полученный на этапе S110. Функция управления сменой полосы движения может использоваться для того, чтобы корректировать требуемый диапазон на основе любого из условий, описанных ниже, либо на основе комбинации двух или более из этих условий.
[0055] Во-первых, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы корректировать требуемый диапазон в соответствии с уровнем необходимости смены полосы движения в окружении движения рассматриваемого транспортного средства. В настоящем варианте осуществления, таблица, проиллюстрированная на фиг. 2, предварительно сохраняет уровень необходимости смены полосы движения в каждом окружении движения. Устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обращаться к таблице, проиллюстрированной на фиг. 2, чтобы получать уровень необходимости смены полосы движения в окружении движения рассматриваемого транспортного средства. Например, в "окружении настигания движущегося впереди транспортного средства", устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы обращаться к таблице, проиллюстрированной на фиг. 2, чтобы получать "X1" в качестве уровня необходимости смены полосы движения. После этого, когда уровень X1 необходимости смены полосы движения является высоким (когда уровень необходимости смены полосы движения составляет предварительно определенное значение или выше), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать длину требуемого диапазона в направлении движения рассматриваемого транспортного средства по сравнению со случаем низкого уровня необходимости смены полосы движения (со случаем, в котором уровень необходимости смены полосы движения меньше предварительно определенного значения), за счет этого уменьшая требуемый диапазон в направлении движения рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 11, при условии, что (A) представляет требуемый диапазон до коррекции, когда уровень X1 необходимости смены полосы движения является высоким (когда уровень необходимости смены полосы движения составляет предварительно определенное значение st1 или выше), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон в направлении движения рассматриваемого транспортного средства, как проиллюстрировано в (B). Следует понимать, что устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы корректировать требуемый диапазон в диапазоне, который не меньше диапазона, который рассматриваемое транспортное средство занимает на поверхности дороги. Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон по мере того, как увеличивается уровень необходимости смены полосы движения в окружении движения рассматриваемого транспортного средства. Помимо этого или альтернативно, хотя не проиллюстрировано, когда уровень X1 необходимости смены полосы движения является низким (когда уровень необходимости смены полосы движения ниже предварительно определенного значения st2 (st1>st2)), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать требуемый диапазон в направлении движения рассматриваемого транспортного средства по сравнению с требуемым диапазоном до коррекции.
[0056] Во-вторых, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы обнаруживать диапазон для перестроения без других транспортных средств в следующей полосе движения, смежной со смежной полосой движения (следующей смежной полосе движения), и корректировать требуемый диапазон на основе обнаруженного диапазона для перестроения в следующей смежной полосе движения. Например, когда пространство (например, пространство, соответствующее требуемому диапазону), на которое может сменять полосу движения другое транспортное средство, движущееся в смежной полосе движения (также в дальнейшем называемое "находящимся в смежной полосе движения транспортным средством"), обнаруживается в диапазоне для перестроения в следующей смежной полосе движения, т.е. когда пространство, на которое может сменять полосу движения находящееся в смежной полосе движения транспортное средство, может обнаруживаться в следующей смежной полосе движения, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон. В частности, когда пространство, на которое может сменять полосу движения находящееся в смежной полосе движения транспортное средство, может обнаруживаться в следующей смежной полосе движения, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать длину требуемого диапазона в направлении движения рассматриваемого транспортного средства, за счет этого уменьшая требуемый диапазон в направлении движения рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 12, при условии, что (A) представляет требуемый диапазон до коррекции, когда пространство, на которое может сменять полосу движения находящееся в смежной полосе движения транспортное средство, может обнаруживаться в следующей смежной полосе движения, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать длину требуемого диапазона в направлении движения рассматриваемого транспортного средства, как проиллюстрировано в (B), за счет этого уменьшая требуемый диапазон в направлении движения рассматриваемого транспортного средства. Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон в направлении движения рассматриваемого транспортного средства по мере того, как увеличивается пространство, на которое находящееся в смежной полосе движения транспортное средство может сменять полосу движения, в следующей смежной полосе движения.
[0057] При коррекции требуемого диапазона на основе диапазона для перестроения в следующей смежной полосе движения, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы корректировать требуемый диапазон с учетом ширины дороги следующей смежной полосы движения. Например, когда ширина дороги следующей смежной полосы движения составляет предварительно определенное расстояние или более, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы задавать требуемый диапазон меньшим диапазона, когда ширина дороги следующей смежной полосы движения меньше предварительно определенного расстояния. Это обусловлено тем, что по мере того, как увеличивается ширина дороги следующей смежной полосы движения, находящееся в смежной полосе движения транспортное средство может легко сменять полосу движения на следующую смежную полосу движения, и, соответственно, рассматриваемое транспортное средство также может легко сменять полосу движения на смежную полосу движения. Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон в направлении движения рассматриваемого транспортного средства по мере того, как увеличивается ширина дороги следующей смежной полосы движения.
[0058] В-третьих, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы корректировать требуемый диапазон на основе позиции движения в направлении ширины дороги другого транспортного средства, движущегося в смежной полосе движения (находящегося в смежной полосе движения транспортного средства). В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать позицию движения находящегося в смежной полосе движения транспортного средства в направлении ширины дороги. Когда позиция движения находящегося в смежной полосе движения транспортного средства в направлении ширины дороги находится ближе к стороне полосы движения рассматриваемого транспортного средства, чем к центру смежной полосы движения, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы увеличивать длину требуемого диапазона в направлении движения рассматриваемого транспортного средства, чтобы за счет этого увеличивать требуемый диапазон. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы увеличивать длину требуемого диапазона в прямом направлении относительно рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства, и увеличивать длину требуемого диапазона в обратном направлении относительно рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 13A, при условии, что (A) представляет требуемый диапазон до коррекции, устройство 190 управления сможет использовать функцию управления сменой полосы движения для того, чтобы увеличивать требуемый диапазон вперед, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства и ближе к стороне полосы движения рассматриваемого транспортного средства, чем к центру смежной полосы движения, как проиллюстрировано в (B), и увеличивать требуемый диапазон назад, когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства и ближе к стороне полосы движения рассматриваемого транспортного средства, чем к центру смежной полосы движения, как проиллюстрировано в (C). Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать требуемый диапазон в направлении движения рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство находится ближе к стороне полосы движения рассматриваемого транспортного средства (когда расстояние в направлении ширины дороги от разделительных линий на стороне полосы движения рассматриваемого транспортного средства для смежной полосы движения до находящегося в смежной полосе движения транспортного средства меньше).
[0059] Помимо этого или альтернативно, когда позиция движения находящегося в смежной полосе движения транспортного средства в направлении ширины дороги находится ближе к противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, чем к центру смежной полосы движения, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать длину требуемого диапазона в направлении движения рассматриваемого транспортного средства, чтобы за счет этого уменьшать требуемый диапазон. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон спереди, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства, и уменьшать требуемый диапазон сзади, когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 13B, при условии, что (A) представляет требуемый диапазон до коррекции, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон спереди, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства и ближе к противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, чем к центру смежной полосы движения, как проиллюстрировано в (B), и уменьшать требуемый диапазон сзади, когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства и ближе к противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, чем к центру смежной полосы движения, как проиллюстрировано в (C). Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон в направлении движения рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство находится ближе к противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства (когда расстояние в направлении ширины дороги от разделительных линий на стороне полосы движения рассматриваемого транспортного средства для смежной полосы движения до находящегося в смежной полосе движения транспортного средства больше).
[0060] В-четвертых, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы корректировать требуемый диапазон на основе состояния подсвечивания указателей поворота другого транспортного средства, движущегося в смежной полосе движения (находящегося в смежной полосе движения транспортного средства). В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать состояние подсвечивания указателей поворота находящегося в смежной полосе движения транспортного средства. Когда находящееся в смежной полосе движения транспортное средство подсвечивает указатели поворота на стороне полосы движения рассматриваемого транспортного средства, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы увеличивать длину требуемого диапазона в направлении движения рассматриваемого транспортного средства, чтобы за счет этого увеличивать требуемый диапазон. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы увеличивать длину требуемого диапазона в прямом направлении относительно рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство, движущееся впереди рассматриваемого транспортного средства, подсвечивает указатели поворота на стороне полосы движения рассматриваемого транспортного средства, и увеличивать длину требуемого диапазона в обратном направлении относительно рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство, движущееся позади рассматриваемого транспортного средства, подсвечивает указатели поворота на стороне полосы движения рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 14A, при условии, что (A) представляет требуемый диапазон до коррекции, устройство 190 управления сможет использовать функцию управления сменой полосы движения для того, чтобы увеличивать требуемый диапазон вперед, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства при подсвечивании указателей поворота на стороне полосы движения рассматриваемого транспортного средства. Когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства при подсвечивании указателей поворота на стороне полосы движения рассматриваемого транспортного средства, как проиллюстрировано в (C), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать требуемый диапазон назад.
[0061] Помимо этого или альтернативно, когда находящееся в смежной полосе движения транспортное средство подсвечивает указатели поворота на противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать длину требуемого диапазона в направлении движения рассматриваемого транспортного средства, чтобы за счет этого уменьшать требуемый диапазон. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон спереди, когда находящееся в смежной полосе движения транспортное средство, движущееся впереди рассматриваемого транспортного средства, подсвечивает указатели поворота на противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, и уменьшать требуемый диапазон сзади, когда находящееся в смежной полосе движения транспортное средство, движущееся позади рассматриваемого транспортного средства, подсвечивает указатели поворота на противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 14B, при условии, что (A) представляет требуемый диапазон до коррекции, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон спереди, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства при подсвечивании указателей поворота на противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства. Когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства при подсвечивании указателей поворота на противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, как проиллюстрировано в (C), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон сзади.
[0062] В-пятых, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы корректировать требуемый диапазон на основе скорости и/или ускорения другого транспортного средства, движущегося в смежной полосе движения (находящегося в смежной полосе движения транспортного средства). В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать скорость и ускорение находящегося в смежной полосе движения транспортного средства и оценивать то, отдаляется или нет находящееся в смежной полосе движения транспортное средство от рассматриваемого транспортного средства, из скорости и ускорения находящегося в смежной полосе движения транспортного средства, например, как проиллюстрировано на фиг. 8. После этого, когда оценивается то, что находящееся в смежной полосе движения транспортное средство отдаляется от рассматриваемого транспортного средства, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать длину требуемого диапазона в направлении движения рассматриваемого транспортного средства, чтобы за счет этого уменьшать требуемый диапазон в направлении движения рассматриваемого транспортного средства. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать требуемый диапазон спереди, когда находящееся в смежной полосе движения транспортное средство, движущееся впереди рассматриваемого транспортного средства, отдаляется от рассматриваемого транспортного средства, и уменьшать требуемый диапазон сзади, когда находящееся в смежной полосе движения транспортное средство, движущееся позади рассматриваемого транспортного средства, отдаляется от рассматриваемого транспортного средства.
[0063] Помимо этого или альтернативно, когда оценивается то, что находящееся в смежной полосе движения транспортное средство приближается к рассматриваемому транспортному средству, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы увеличивать длину требуемого диапазона в направлении движения рассматриваемого транспортного средства, чтобы за счет этого увеличивать требуемый диапазон в направлении движения рассматриваемого транспортного средства. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы увеличивать требуемый диапазон вперед, когда находящееся в смежной полосе движения транспортное средство, движущееся впереди рассматриваемого транспортного средства, приближается к рассматриваемому транспортному средству, и увеличивать требуемый диапазон назад, когда находящееся в смежной полосе движения транспортное средство, движущееся позади рассматриваемого транспортного средства, приближается к рассматриваемому транспортному средству.
[0064] В альтернативном варианте осуществления, этап S111 может включать в себя коррекцию диапазона для перестроения в смежной полосе движения вместо коррекции требуемого диапазона.
[0065] Например, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы корректировать диапазон для перестроения в смежной полосе движения в соответствии с уровнем необходимости смены полосы движения в окружении движения рассматриваемого транспортного средства, как проиллюстрировано на фиг. 15, вместо использования функции управления сменой полосы движения для того, чтобы корректировать требуемый диапазон в соответствии с уровнем необходимости смены полосы движения в окружении движения рассматриваемого транспортного средства, как проиллюстрировано на фиг. 11. В частности, когда уровень необходимости смены полосы движения является высоким (когда уровень необходимости смены полосы движения составляет предварительно определенное значение или выше), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать длину диапазона для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства по сравнению со случаем низкого уровня необходимости смены полосы движения (со случаем, в котором уровень необходимости смены полосы движения меньше предварительно определенного значения), за счет этого уменьшая диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 15, при условии, что (A) представляет диапазон для перестроения в смежной полосе движения до коррекции, когда уровень необходимости смены полосы движения является высоким (когда уровень необходимости смены полосы движения составляет предварительно определенное значение или выше), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства, как проиллюстрировано в (B). Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения по мере того, как увеличивается уровень необходимости смены полосы движения в окружении движения рассматриваемого транспортного средства.
[0066] Устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы корректировать диапазон для перестроения в смежной полосе движения на основе диапазона для перестроения в следующей смежной полосе движения, как проиллюстрировано на фиг. 16, вместо использования функции управления сменой полосы движения для того, чтобы корректировать требуемый диапазон на основе диапазона для перестроения в следующей смежной полосе движения, как проиллюстрировано на фиг. 12. Например, в примере, проиллюстрированном на фиг. 16, при условии, что (A) представляет диапазон для перестроения в смежной полосе движения до коррекции, когда пространство (например, пространство, соответствующее требуемому диапазону), на которое может сменять полосу движения находящееся в смежной полосе движения транспортное средство, может обнаруживаться в диапазоне для перестроения в следующей смежной полосе движения, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать длину диапазона для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства, как проиллюстрировано в (B), за счет этого увеличивая диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства. Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства по мере того, как увеличивается диапазон для перестроения в следующей смежной полосе движения.
[0067] При коррекции диапазона для перестроения в смежной полосе движения на основе диапазона для перестроения в следующей смежной полосе движения, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы корректировать диапазон для перестроения в смежной полосе движения с учетом ширины дороги следующей смежной полосы движения. Например, когда ширина дороги следующей смежной полосы движения составляет предварительно определенное расстояние или более, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы задавать диапазон для перестроения в смежной полосе движения большим диапазона, когда ширина дороги следующей смежной полосы движения меньше предварительно определенного расстояния. Это обусловлено тем, что по мере того, как увеличивается ширина дороги следующей смежной полосы движения, находящееся в смежной полосе движения транспортное средство может легко сменять полосу движения на следующую смежную полосу движения, и, соответственно, рассматриваемое транспортное средство также может легко сменять полосу движения на смежную полосу движения. Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства по мере того, как увеличивается ширина дороги следующей смежной полосы движения.
[0068] Устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы корректировать диапазон для перестроения на основе позиции движения в направлении ширины дороги другого транспортного средства, движущегося в смежной полосе движения (находящегося в смежной полосе движения транспортного средства), как проиллюстрировано на фиг. 17A и фиг. 17B, вместо использования функции управления сменой полосы движения для того, чтобы корректировать требуемый диапазон на основе позиции движения находящегося в смежной полосе движения транспортного средства в направлении ширины дороги, как проиллюстрировано на фиг. 13A и фиг. 13B. В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обнаруживать позицию движения находящегося в смежной полосе движения транспортного средства в направлении ширины дороги. Когда позиция движения находящегося в смежной полосе движения транспортного средства в направлении ширины дороги находится ближе к стороне полосы движения рассматриваемого транспортного средства, чем к центру смежной полосы движения, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать диапазон для перестроения в смежной полосе движения спереди рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства, и уменьшать диапазон для перестроения в смежной полосе движения вследствие рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 17A, при условии, что (A) представляет диапазон для перестроения в смежной полосе движения до коррекции, устройство 190 управления сможет использовать функцию управления сменой полосы движения для того, чтобы уменьшать диапазон для перестроения в смежной полосе движения спереди, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства и ближе к стороне полосы движения рассматриваемого транспортного средства, как проиллюстрировано в (B). Когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства и ближе к стороне полосы движения рассматриваемого транспортного средства, как проиллюстрировано в (C), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать диапазон для перестроения в смежной полосе движения сзади. Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство находится ближе к стороне полосы движения рассматриваемого транспортного средства (когда расстояние в направлении ширины дороги от разделительных линий на стороне полосы движения рассматриваемого транспортного средства для смежной полосы движения до находящегося в смежной полосе движения транспортного средства меньше).
[0069] Помимо этого или альтернативно, когда позиция движения находящегося в смежной полосе движения транспортного средства в направлении ширины дороги находится ближе к противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, чем к центру смежной полосы движения, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения вперед относительно рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства, и увеличивать диапазон для перестроения в смежной полосе движения назад относительно рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 17B, при условии, что (A) представляет диапазон для перестроения в смежной полосе движения до коррекции, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения вперед, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства и ближе к противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, как проиллюстрировано в (B), и увеличивать диапазон для перестроения в смежной полосе движения назад, когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства и ближе к противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, как проиллюстрировано в (C). Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства, когда находящееся в смежной полосе движения транспортное средство находится ближе к противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства (когда расстояние в направлении ширины дороги от разделительных линий на стороне полосы движения рассматриваемого транспортного средства для смежной полосы движения до находящегося в смежной полосе движения транспортного средства больше).
[0070] Устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы корректировать диапазон для перестроения в смежной полосе движения на основе состояния подсвечивания указателей поворота находящегося в смежной полосе движения транспортного средства, как проиллюстрировано на фиг. 18A и фиг. 18B, вместо использования функции управления сменой полосы движения для того, чтобы корректировать требуемый диапазон на основе состояния подсвечивания указателей поворота находящегося в смежной полосе движения транспортного средства, как проиллюстрировано на фиг. 14A и фиг. 14B. В частности, когда находящееся в смежной полосе движения транспортное средство подсвечивает указатели поворота на стороне полосы движения рассматриваемого транспортного средства, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать длину диапазона для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства, чтобы за счет этого уменьшать диапазон для перестроения в смежной полосе движения. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать диапазон для перестроения в смежной полосе движения спереди, когда находящееся в смежной полосе движения транспортное средство, движущееся впереди рассматриваемого транспортного средства, подсвечивает указатели поворота на стороне полосы движения рассматриваемого транспортного средства, и уменьшать диапазон для перестроения в смежной полосе движения сзади, когда находящееся в смежной полосе движения транспортное средство, движущееся позади рассматриваемого транспортного средства, подсвечивает указатели поворота на стороне полосы движения рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 18A, при условии, что (A) представляет диапазон для перестроения в смежной полосе движения до коррекции, устройство 190 управления сможет использовать функцию управления сменой полосы движения для того, чтобы уменьшать диапазон для перестроения в смежной полосе движения спереди, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства при подсвечивании указателей поворота на стороне полосы движения рассматриваемого транспортного средства, как проиллюстрировано в (B). Когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства при подсвечивании указателей поворота на стороне полосы движения рассматриваемого транспортного средства, как проиллюстрировано в (C), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать диапазон для перестроения в смежной полосе движения сзади.
[0071] Помимо этого или альтернативно, когда находящееся в смежной полосе движения транспортное средство подсвечивает указатели поворота на противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения вперед, когда находящееся в смежной полосе движения транспортное средство, движущееся впереди рассматриваемого транспортного средства, подсвечивает указатели поворота на противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, и увеличивать диапазон для перестроения назад, когда находящееся в смежной полосе движения транспортное средство, движущееся позади рассматриваемого транспортного средства, подсвечивает указатели поворота на противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 18B, при условии, что (A) представляет диапазон для перестроения в смежной полосе движения до коррекции, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения вперед, когда находящееся в смежной полосе движения транспортное средство движется впереди рассматриваемого транспортного средства при подсвечивании указателей поворота на противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, как проиллюстрировано в (B). Когда находящееся в смежной полосе движения транспортное средство движется позади рассматриваемого транспортного средства при подсвечивании указателей поворота на противоположной стороне по отношению к полосе движения рассматриваемого транспортного средства, как проиллюстрировано в (C), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения назад.
[0072] Устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы корректировать диапазон для перестроения в смежной полосе движения на основе скорости и/или ускорения находящегося в смежной полосе движения транспортного средства вместо использования функции управления сменой полосы движения для того, чтобы корректировать требуемый диапазон на основе скорости и/или ускорения находящегося в смежной полосе движения транспортного средства. В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы оценивать то, отдаляется или нет находящееся в смежной полосе движения транспортное средство от рассматриваемого транспортного средства, из скорости и ускорения находящегося в смежной полосе движения транспортного средства. Когда оценивается то, что находящееся в смежной полосе движения транспортное средство отдаляется от рассматриваемого транспортного средства, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы увеличивать длину диапазона для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства, чтобы за счет этого увеличивать диапазон для перестроения в смежной полосе движения. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы увеличивать диапазон для перестроения в смежной полосе движения вперед, когда находящееся в смежной полосе движения транспортное средство, движущееся впереди рассматриваемого транспортного средства, отдаляется от рассматриваемого транспортного средства, и увеличивать диапазон для перестроения в смежной полосе движения назад позади, когда находящееся в смежной полосе движения транспортное средство, движущееся позади рассматриваемого транспортного средства, отдаляется от рассматриваемого транспортного средства.
[0073] Помимо этого или альтернативно, когда находящееся в смежной полосе движения транспортное средство приближается к рассматриваемому транспортному средству, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать длину диапазона для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства, чтобы за счет этого уменьшать диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства. Более конкретно, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы уменьшать диапазон для перестроения в смежной полосе движения спереди, когда находящееся в смежной полосе движения транспортное средство, движущееся впереди рассматриваемого транспортного средства, приближается к рассматриваемому транспортному средству, и уменьшать диапазон для перестроения в смежной полосе движения сзади, когда находящееся в смежной полосе движения транспортное средство, движущееся позади рассматриваемого транспортного средства, приближается к рассматриваемому транспортному средству.
[0074] Ниже описывается следующий процесс при условии, что требуемый диапазон корректируется на этапе S111.
[0075] На этапе S112, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, существует или нет пространство в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T1. Пространство соответствует требуемому диапазону, скорректированному на этапе S111. Диапазон для перестроения в смежной полосе движения после предварительно определенного времени T1 оценивается на этапе S107. В частности, как проиллюстрировано на фиг. 19(A), устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы задавать скорректированный требуемый диапазон в целевой позиции для смены полосы движения, которая задается на этапе S105. Затем устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, включает или нет диапазон для перестроения в смежной полосе движения после предварительно определенного времени T1 в себя скорректированный требуемый диапазон. Например, в примере, проиллюстрированном на фиг. 19(A), диапазон для перестроения в смежной полосе движения после предварительно определенного времени T1 не включает в себя скорректированный требуемый диапазон. Устройство 190 управления в силу этого использует функцию управления сменой полосы движения для того, чтобы определять то, что нет пространства, соответствующего скорректированному требуемому диапазону в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T1. С другой стороны, когда диапазон для перестроения в смежной полосе движения после предварительно определенного времени T1 включает в себя скорректированный требуемый диапазон, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, что существует пространство, соответствующее скорректированному требуемому диапазону в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T1. Когда существует пространство, соответствующее скорректированному требуемому диапазону в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T1, процедура переходит к этапу S114, проиллюстрированному на фиг. 4, тогда как когда пространство отсутствует, процедура переходит к этапу S113.
[0076] На этапе S113, определено то, что диапазон для перестроения в смежной полосе движения после предварительно определенного времени T1 не включает в себя скорректированный требуемый диапазон, и не может обнаруживаться пространство, которое соответствует требуемому диапазону в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T1. Следовательно, на этапе S113, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы изменять целевую позицию для смены полосы движения. В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы сбрасывать целевую позицию для смены полосы движения таким образом, что диапазон для перестроения в смежной полосе движения после предварительно определенного времени T1 включает в себя скорректированный требуемый диапазон. Например, когда передний участок требуемого диапазона не включен в диапазон для перестроения в смежной полосе движения после предварительно определенного времени T1, как проиллюстрировано на фиг. 19(A), целевая позиция для смены полосы движения сдвигается назад. Это обеспечивает возможность включения скорректированного требуемого диапазона в диапазон для перестроения в смежной полосе движения после предварительно определенного времени T1, как проиллюстрировано на фиг. 19(B), и определяется то, что может обнаруживаться пространство, которое соответствует требуемому диапазону в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T1. После этапа S113 выполняется этап S106, с которого обнаружение диапазона для перестроения и т.п. выполняется снова.
[0077] С другой стороны, когда на этапе S112, определяется то, что диапазон для перестроения в смежной полосе движения после предварительно определенного времени T1 включает в себя скорректированный требуемый диапазон, процедура переходит к этапу S114, проиллюстрированному на фиг. 4. На этапе S114, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы выполнять процесс запроса для управления сменой полосы движения. Управление сменой полосы движения означает управление для выполнения смены полосы движения. На этапе S114, запрос в отношении того, должно или нет выполняться управление сменой полосы движения, выполняется водителю до того, как фактически выполняется смена полосы движения. Затем на этапе S115, выполняется определение в отношении того, разрешает или нет водитель смену полосы движения в ответ на запрос этапа S114. Когда водитель разрешает смену полосы движения, процедура переходит к этапу S116, тогда как когда водитель не разрешает смену полосы движения, процедура возвращается к этапу S101.
[0078] Например, на этапе S104, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы отображать сообщение "Какое действие следует выбрать для движущегося впереди транспортного средства?" вместе с информацией запроса на дисплее устройства 150 выдачи оповещений. Информация запроса может включать в себя опции "ехать за" и "сменить полосу движения для обгона". В ответ на это, водитель может выбирать любую из опций через устройство 160 ввода. Например, когда водитель выбирает опцию "сменить полосу движения для обгона", функция управления сменой полосы движения используется на этапе S115, чтобы определять то, что водитель разрешает смену полосы движения, и процедура переходит к этапу S116. С другой стороны, когда водитель выбирает опцию "ехать за", функция управления сменой полосы движения используется на этапе S115, чтобы определять то, что водитель не разрешает смену полосы движения, и процедура возвращается к этапу S101.
[0079] Устройство 190 управления также может использовать функцию управления сменой полосы движения для того, чтобы представлять сообщение "Какое действие следует выбрать следует выбрать для движущегося впереди транспортного средства?" вместе с опциями "ехать за" и "сменить полосу движения для обгона" в качестве информации запроса, и оповещать информацию запроса водителю таким образом, что информация запроса дополнительно включает в себя сообщение "Выбор будет выполнен автоматически, если кнопка выбора не будет нажата в течение секунд X". В этом случае, когда водитель не выбирает ни одной из опций в течение определенного периода времени, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы автоматически выбирать предварительно определенную опцию по умолчанию из числа опций "ехать за" и "сменить полосу движения для обгона". Опция по умолчанию может представлять собой конкретную опцию либо также может представлять собой опцию, которая может переменно задаваться. Например, когда диапазон для перестроения становится небольшим в определенный период времени до тех пор, пока не будет выбрана опция по умолчанию, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы задавать "ехать за" в качестве опции по умолчанию, тогда как когда диапазон для перестроения становится большим, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы задавать "сменить полосу движения для обгона" в качестве опции по умолчанию. Устройство 190 управления также может использовать функцию управления сменой полосы движения для того, чтобы задавать опцию, которую водитель выбирает многократно в предыдущие времена, в качестве опции по умолчанию на основе предыстории выбора опций водителем. Когда водитель выбирает опцию "сменить полосу движения для обгона" в течение определенного периода времени, процедура переходит к этапу S116, тогда как когда водитель выбирает опцию "ехать за" в течение определенного периода времени, процедура возвращается к этапу S101.
[0080] Устройство 190 управления также может использовать функцию управления сменой полосы движения для того, чтобы уведомлять такие сообщения, как "Теперь смените полосу движения для обгона движущегося впереди транспортного средства" и "Нажмите кнопку отмены ниже при прерывании смены полосы движения", вместе с информацией запроса, включающей в себя кнопку "Отмена" для отмены смены полосы движения, водителю через устройство 150 выдачи оповещений. В этом случае, предполагается, что после того, как информация запроса оповещается на этапе S114, водитель разрешает смену полосы движения на этапе S115, и процедура переходит к этапу S117. Затем на этапе S117, управление сменой полосы движения инициируется. Когда водитель нажимает кнопку "Отмена", управление сменой полосы движения отменяется, и процедура возвращается к этапу S101.
[0081] На этапе S116, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы получать временной предел для смены полосы движения. В настоящем варианте осуществления, как проиллюстрировано на фиг. 2, таблица сохраняет время для рассматриваемого транспортного средства, чтобы приближаться к точке, в которой смена полосы движения является трудной в каждом окружении движения, в качестве временного предела. Устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обращаться к таблице, проиллюстрированной на фиг. 2, чтобы получать временной предел (Z) в окружении движения рассматриваемого транспортного средства. Например, в "окружении настигания движущегося впереди транспортного средства" из примеров, проиллюстрированных на фиг. 2, временной предел сохраняется в качестве (время до контакта с движущимся впереди транспортным средством-α) секунд. В этом случае, устройство 190 управления использует функцию управления движением для того, чтобы обращаться к таблице, проиллюстрированной на фиг. 2, чтобы вычислять время до контакта (TTC) с движущимся впереди транспортным средством и получать (вычисленное время до контакта (TTC) с движущимся впереди транспортным средством-α) секунд в качестве временного предела. Константа α составляет несколько секунд (например, 5 секунд) и может надлежащим образом задаваться для каждого окружения движения. Например, когда время до контакта (TTC) с движущимся впереди транспортным средством составляет 30 секунд, и α составляет 5 секунд, временной предел для смены полосы движения составляет 25 секунд.
[0082] На этапе S117, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы инициировать управление сменой полосы движения. В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы обеспечивать возможность устройству 180 управления приведением в движение инициировать управление работой актуатора рулевого управления таким образом, что рассматриваемое транспортное средство перемещается в целевую позицию для смены полосы движения, заданную на этапе S105 или этапе S113.
[0083] На этапах S118-S122, аналогично этапам S104 и S106-S109, обнаруживаются текущий диапазон для перестроения и диапазон для перестроения после требуемого времени T2 для рассматриваемого транспортного средства, чтобы перемещаться в целевую позицию (этапы S118-S120), и проводится оценка того, становится или нет диапазон для перестроения небольшим после предварительно определенного времени T2 (этап S121). Когда оценивается то, что диапазон для перестроения становится небольшим после предварительно определенного времени T2 (этап S121="Да"), информация оповещения в отношении того, что диапазон для перестроения становится небольшим, оповещается водителю (этап S122).
[0084] Затем на этапе S123, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, существует или нет пространство в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T2. Пространство соответствует требуемому диапазону, скорректированному на этапе S111. Диапазон для перестроения в смежной полосе движения после предварительно определенного времени T2 оценивается на этапе S120. Устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы задавать скорректированный требуемый диапазон в целевой позиции для смены полосы движения. Когда диапазон для перестроения в смежной полосе движения после предварительно определенного времени T2 включает в себя скорректированный требуемый диапазон, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, что существует пространство, соответствующее требуемому диапазону в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T2, и процедура переходит к этапу S124. С другой стороны, когда выполняется определение в отношении того, что нет пространства, соответствующего требуемому диапазону в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T2, процедура переходит к этапу S128.
[0085] На этапе S124, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, проходит или нет временной предел Z, полученный на этапе S117, после инициирования управления сменой полосы движения на этапе S116. Когда истекшее время S1 после инициирования управления сменой полосы движения превышает временной предел Z, процедура переходит к этапу S127, тогда как когда истекшее время S1 после инициирования управления сменой полосы движения не превышает временной предел Z, процедура переходит к этапу S125.
[0086] На этапе S125, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, достигает или нет рассматриваемое транспортное средство целевой позиции для смены полосы движения. Когда рассматриваемое транспортное средство достигает целевой позиции для смены полосы движения, управление сменой полосы движения заканчивается на этапе S126, чтобы завершать процесс управления сменой полосы движения. Таким образом, смена полосы движения рассматриваемого транспортного средства завершается. С другой стороны, когда рассматриваемое транспортное средство не достигает целевой позиции для смены полосы движения, процедура возвращается к этапу S118, чтобы продолжать управление сменой полосы движения.
[0087] Когда, на этапе S124, истекшее время S1 после инициирования управления сменой полосы движения превышает временной предел Z, т.е. когда рассматриваемое транспортное средство не может достигать целевой позиции для смены полосы движения даже после того, как временной предел Z проходит после инициирования управления сменой полосы движения, процедура переходит к этапу S127. На этапе S127, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы выполнять процесс прерывания для управления сменой полосы движения. В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы оповещать такую информацию, что управление сменой полосы движения должно прерываться для водителя. Например, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы оповещать сообщение "Смена полосы движения должно прерываться вследствие превышения тайм-аута" водителю через устройство 150 выдачи оповещений. После этого, функция управления сменой полосы движения заканчивается на этапе S126, и процедура возвращается к этапу S101. В процессе прерывания для управления сменой полосы движения, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы выезжать из позиции движения рассматриваемого транспортного средства в направлении ширины дороги в позиции при окончании управления сменой полосы движения или восстанавливать позицию движения в позицию при инициировании управления сменой полосы движения. Относительно того, когда позиция движения восстанавливается в позицию при инициировании управления сменой полосы движения, такое сообщение, как "Исходная позиция должна восстанавливаться вследствие тайм-аута", может оповещаться водителю.
[0088] В процессе прерывания для управления сменой полосы движения, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы определять то, хочет или нет водитель продолжать смену полосы движения при поддержании текущего состояния движения. Когда водитель хочет продолжать смену полосы движения, временной предел Z может расширяться. Например, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы представлять некоторую информацию оповещения водителю. Информация оповещения может включать в себя сообщение "Продолжать смену полосы движения, несмотря на таймаут?" и опции "прерывать" и "продолжать". Когда водитель выбирает опцию "продолжать", устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы расширять временной предел Z, и процедура возвращается к этапу S118. Когда водитель выбирает опцию "прерывать", управление сменой полосы движения заканчивается на этапе S126.
[0089] Устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы предоставлять время для ответа при определении того, хочет или нет водитель продолжать смену полосы движения, и автоматически выполнять опцию по умолчанию, если водитель не предоставляет ответ в течение времени для ответа. Например, информация запроса может оповещаться водителю, включающая в себя сообщение "Выбор будет выполнен автоматически, если кнопка выбора не будет нажата в течение XX секунд" в дополнение к сообщению "Продолжать смену полосы движения, несмотря на таймаут?" и опциям "прерывать" и "продолжать". Время для ответа и опция по умолчанию могут представлять собой конкретное время и конкретную опцию либо также могут переменно задаваться. В примере, в котором время для ответа и опция по умолчанию задаются переменно, время для ответа может уменьшаться, либо "прерывать" может задаваться в качестве опции по умолчанию, когда диапазон для перестроения становится небольшим. Помимо этого или альтернативно, предыстория выбора водителем может использоваться для того, чтобы уменьшать время для ответа на опцию, которую водитель выбирает несколько раз в предыдущие времена, или задавать опцию, которую водитель выбирает многократно в предыдущие времена, в качестве опции по умолчанию. Когда опция "продолжать" выбирается, временной предел Z расширяется, и процедура затем возвращается к этапу S118, тогда как когда опция "прерывать" выбирается, управление сменой полосы движения заканчивается на этапе S126.
[0090] В процессе прерывания для управления сменой полосы движения, устройство 190 управления также может использовать функцию управления сменой полосы движения для того, чтобы автоматически продолжать смену полосы движения и оповещать относительно способа прерывания смены полосы движения водителю. Например, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уведомлять такие сообщения, как "Смена полосы движения должна продолжаться, несмотря на таймаут" и "Нажмите кнопку отмены ниже при прерывании смены полосы движения", вместе с информацией оповещения, включающей в себя кнопку "Отмена" для отмены смены полосы движения, водителю через устройство 150 выдачи оповещений. В этом случае, когда кнопка "Отмена" не нажата, временной предел Z расширяется, и процедура затем возвращается к этапу S118. Когда кнопка "Отмена" нажимается, управление сменой полосы движения заканчивается на этапе S126.
[0091] В процессе прерывания для управления сменой полосы движения, когда временной предел Z расширяется, чтобы продолжать смену полосы движения, временной предел Z расширяется в течение времени, в которое смена полосы движения может продолжаться. Например, при условии, что окружение движения рассматриваемого транспортного средства представляет собой "окружение приближения к точке слияния", когда время для прибытия в точку слияния составляет 10 секунд, но временной предел Z составляет 7 секунд, т.е. когда время для прибытия в точку слияния превышает временной предел Z, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы расширять временной предел Z, например, до 9 секунд, чтобы продолжать смену полосы движения. В том случае, если расширенный временной предел Z (9 секунд) проходит, управление сменой полосы движения заканчивается.
[0092] Таким образом, когда истекшее время S1 после инициирования управления сменой полосы движения превышает временной предел Z, процесс прерывания для управления сменой полосы движения может выполняться, чтобы за счет этого эффективно предотвращать некомфортное ощущение, возникающее у водителя. Это описывается подробнее. Например, если смена полосы движения не выполняется, даже когда временной предел Z проходит после инициирования управления сменой полосы движения, может исчезать намерение водителя на то, чтобы сменять полосу движения. В таком случае, некомфортное ощущение может вызываться у водителя, если смена полосы движения выполняется после того, как водитель передумал таким образом, что он не хочет смены полосы движения, либо если смена полосы движения выполняется, когда водитель забывает об этом. Процесс прерывания для управления сменой полосы движения может уменьшать такое некомфортное ощущение, возникающее у водителя.
[0093] На этапе S123, когда выполняется определение в отношении того, что нет пространства, соответствующего требуемому диапазону в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T2, процедура переходит к этапу S128. Таким образом, когда имеется пространство, соответствующее требуемому диапазону в диапазоне для перестроения в смежной полосе движения в момент времени этапа S112 инициирования управления сменой полосы движения, но нет пространства, соответствующего требуемому диапазону в диапазоне для перестроения в смежной полосе движения после инициирования управления сменой полосы движения, процедура переходит к этапу S128. На этапе S123, также когда диапазон для перестроения в смежной полосе движения в момент времени этапа S112 инициирования управления сменой полосы движения становится небольшим в момент времени этапа S123, процедура может переходить к этапу S128. На этапе S128, обнаружение выполняется для позиционной взаимосвязи в направлении ширины дороги между рассматриваемым транспортным средством и разделительными линиями, через которые рассматриваемое транспортное средство должно переезжать при смене полосы движения (в дальнейшем называемыми "разделительными линиями для перестроения").
[0094] Например, фиг. 20 примерно иллюстрирует окружение, в котором рассматриваемое транспортное средство сменяет полосу движения в направлении, представленном посредством стрелок на чертеже (смена полосы движения с левосторонней полосы движения на правостороннюю полосу движения на чертеже). В этом случае, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять любое из состояния, в котором ни одна часть рассматриваемого транспортного средства не переезжает через разделительные линии для перестроения, как проиллюстрировано на фиг. 20(A), состояния, в котором часть рассматриваемого транспортного средства переезжает через разделительные линии для перестроения, но центральная линия рассматриваемого транспортного средства не переезжает через разделительные линии для перестроения, как проиллюстрировано на фиг. 20(B), состояния, в котором все рассматриваемое транспортное средство не полностью переезжает через разделительные линии для перестроения, но центральная линия рассматриваемого транспортного средства переезжает через разделительные линии для перестроения, как проиллюстрировано на фиг. 20(C), и состояния, в котором все рассматриваемое транспортное средство переезжает через разделительные линии для перестроения, как проиллюстрировано на фиг. 20(D).
[0095] На этапе S129, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы осуществлять процесс управления для прерывания или продолжения смены полосы движения, на основе позиционной взаимосвязи в направлении ширины дороги между разделительными линиями для перестроения и рассматриваемым транспортным средством, определенной на этапе S128. В частности, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять (a) способ представления информации водителю при прерывании или продолжении смены полосы движения, (b) управление после прерывания или продолжения смены полосы движения и (c) позицию движения рассматриваемого транспортного средства при прерывании или продолжении смены полосы движения, на основе позиционной взаимосвязи в направлении ширины дороги между разделительными линиями для перестроения и рассматриваемым транспортным средством.
[0096] Например, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы выполнять любой из следующих четырех способов в качестве способа (a) представления информации водителю при прерывании или продолжении смены полосы движения: (a1) способ, который включает в себя представление информации для предоставления возможности водителю выбирать между опциями прерывания и продолжения смены полосы движения без временного предела, и когда водитель выбирает любую из опций, выполнение опции (прерывание или продолжение смены полосы движения), выбранной водителем; (a2) способ, который включает в себя представление информации для предоставления возможности водителю выбирать между опциями прерывания и продолжения смены полосы движения с временным пределом, и когда водитель выбирает любую из опций в рамках временного предела, выполнение опции (прерывание или продолжение смены полосы движения), выбранной водителем, либо когда водитель не выбирает обе опции в рамках временного предела, выполнение управления (управления по умолчанию) предварительно определенной опцией из числа опций прерывания и продолжение смены полосы движения; (a3) способ, который включает в себя автоматическое выполнение прерывания или продолжения смены полосы движения и явное предоставление водителю способа отмены прерывания или продолжения смены полосы движения, который выполняется автоматически; и (a4) способ, который включает в себя автоматическое выполнение прерывания или продолжения смены полосы движения без явного предоставления водителю способа отмены прерывания или продолжения смены полосы движения, который выполняется автоматически.
[0097] Устройство 190 управления также может использовать функцию управления сменой полосы движения для того, чтобы выполнять любую из следующих трех схем управления в качестве (b) содержимого управления после прерывания или продолжения смены полосы движения: (b1) схема, которая включает в себя прерывание смены полосы движения, а также прерывание управления автоматическим движением; (b2) схема, которая включает в себя прерывание только управления сменой полосы движения и продолжение управления автоматическим движением; и (b3), схема, которая включает в себя приостановку управления сменой полосы движения в состояние ожидания до тех пор, пока пространство, соответствующее требуемому диапазону, не будет обнаружено снова в диапазоне для перестроения в смежной полосе движения, и возобновление управления сменой полосы движения, когда пространство, соответствующее требуемому диапазону, обнаруживается снова в диапазоне для перестроения в смежной полосе движения.
[0098] Устройство 190 управления дополнительно может использовать функцию управления сменой полосы движения для того, чтобы выполнять любую из следующих трех схем позиционного регулирования для позиции движения (c) рассматриваемого транспортного средства при прерывании или продолжении управления сменой полосы движения: (c1) схема, которая включает в себя восстановление позиции рассматриваемого транспортного средства в исходную позицию перед инициированием смены полосы движения; (c2) схема, которая включает в себя перемещение рассматриваемого транспортного средства в позицию около разделительных линий для перестроения в полосе движения, в которой движется рассматриваемое транспортное средство перед инициированием смены полосы движения; и (c3) схема, которая включает в себя поддержание текущей позиции.
[0099] Устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы осуществлять процесс управления для прерывания или продолжения смены полосы движения посредством соответствующего комбинирования двух или более из (a) способа представления информации водителю при прерывании или продолжении смены полосы движения, (b) содержимого управления после прерывания или продолжения смены полосы движения и (c) позиции движения рассматриваемого транспортного средства при прерывании или продолжении смены полосы движения, на основе позиционной взаимосвязи в направлении ширины дороги между разделительными линиями для перестроения и рассматриваемым транспортным средством.
[0100] Например, когда ни одна часть рассматриваемого транспортного средства не переезжает через разделительные линии для перестроения, как проиллюстрировано на фиг. 20(A), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы выполнять способ (a4), который включает в себя автоматическое выполнение прерывания смены полосы движения без явного предоставления водителю способа отмены прерывания смены полосы движения. В этом случае, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы выполнять схему (b1), которая включает в себя прерывание смены полосы движения, а также прерывание управления автоматическим движением, и схему (c1), которая включает в себя восстановление позиции рассматриваемого транспортного средства в исходную позицию перед инициированием смены полосы движения. В таком случае, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы оповещать содержимое управления, которое должно выполняться с этого времени, водителю, такое как "Позиция должна восстанавливаться в исходную позицию, поскольку пространство для смены полосы движения может быть недостаточным" и "Управление автоматическим движением должно отменяться после восстановления в исходную позицию". В этом случае, процесс переходит к этапу S126, чтобы заканчивать управление сменой полосы движения.
[0101] Когда часть рассматриваемого транспортного средства переезжает через разделительные линии для перестроения, но центральная линия рассматриваемого транспортного средства не переезжает через разделительные линии для перестроения, как проиллюстрировано на фиг. 20(B), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы выполнять способ (a3), который включает в себя автоматическое выполнение прерывания смены полосы движения и явное предоставление водителю способа отмены прерывания смены полосы движения. В этом случае, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы выполнять схему (c2), которая включает в себя перемещение рассматриваемого транспортного средства в позицию около разделительных линий для перестроения в полосе движения, в которой рассматриваемое транспортное средство движется перед инициированием смены полосы движения, и затем выполнять схему (b2), которая включает в себя прерывание только управления сменой полосы движения и продолжение управления автоматическим движением. В таком случае, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы оповещать содержимое управления, которое должно выполняться с этого времени, водителю, такое как "Позиция должна восстанавливаться в исходную полосу движения, поскольку пространство для смены полосы движения может быть недостаточным" и "Предыдущее управление автоматическим движением должно продолжаться после восстановления в исходную позицию". Помимо этого или альтернативно, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы отображать сообщение "Нажмите кнопку ниже, если смена полосы движения должна продолжаться" вместе с кнопкой для продолжения смены полосы движения. Когда водитель нажимает кнопку продолжения смены полосы движения, процесс переходит к этапу S130, тогда как когда водитель не нажимает кнопку продолжения смены полосы движения, процесс переходит к этапу S126.
[0102] Когда все рассматриваемое транспортное средство не полностью переезжает через разделительные линии для перестроения, но центральная линия рассматриваемого транспортного средства переезжает через разделительные линии для перестроения, например, как проиллюстрировано на фиг. 20(C), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы выполнять способ (a4), который включает в себя автоматическое выполнение продолжения смены полосы движения без явного предоставления водителю способа отмены продолжения смены полосы движения. В этом случае, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы выполнять схему (c3), которая включает в себя ожидание при поддержании позиции движения рассматриваемого транспортного средства в текущей позиции, и схему (b3), которая включает в себя приостановку управления сменой полосы движения до тех пор, пока пространство, соответствующее требуемому диапазону, не будет обнаружено снова в диапазоне для перестроения в смежной полосе движения, и возобновление управления сменой полосы движения, когда пространство, соответствующее требуемому диапазону, обнаруживается снова в диапазоне для перестроения в смежной полосе движения. В этом случае, например, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы оповещать содержимое управления, которое должно выполняться с этого времени, водителю, такое как "Ожидание должно быть проведено в текущей позиции, поскольку пространство для смены полосы движения может быть недостаточным" и "Управление сменой полосы движения должно возобновляться, если обнаружено пространство для смены полосы движения". В этом случае, процесс переходит к этапу S130.
[0103] Когда все рассматриваемое транспортное средство переезжает через разделительные линии для перестроения, например, как проиллюстрировано на фиг. 20(D), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы выполнять способ (a4), который включает в себя автоматическое выполнение прерывания смены полосы движения без явного предоставления водителю способа отмены прерывания смены полосы движения. В этом случае, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы выполнять схему (c3), которая включает в себя поддержание позиции движения рассматриваемого транспортного средства в текущей позиции, и схему (b2), которая включает в себя прерывание только управления сменой полосы движения и продолжение управления автоматическим движением. В этом случае, например, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы оповещать содержимое управления, которое должно выполняться с этого времени, водителю, такое как "Ожидание должно быть проведено в текущей позиции, поскольку пространство для смены полосы движения может быть недостаточным" и "Предыдущее управление автоматическим движением должно продолжаться". В этом случае, процесс переходит к этапу S126, чтобы заканчивать управление сменой полосы движения.
[0104] Позиционная взаимосвязь в направлении ширины дороги между разделительными линиями для перестроения и рассматриваемым транспортным средством не ограничена четырьмя окружениями, проиллюстрированными на фиг. 20(A)-(D), и может использоваться пять или более либо три или менее возможных окружений. Комбинация схем управления для каждой позиционной взаимосвязи не ограничена вышеописанными комбинациями. Любая комбинация возможна из числа двух или более из (a) способа представления информации водителю при прерывании или продолжении смены полосы движения, (b) содержимого управления после прерывания или продолжения смены полосы движения и (c) позиции движения рассматриваемого транспортного средства при прерывании или продолжении смены полосы движения.
[0105] Далее приводится описание для случая, в котором продолжение смены полосы движения выполняется на этапе S129. После этапа S129 инициирования продолжения смены полосы движения выполняется этап S130. На этапе S130, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы измерять истекшее время S2 после того, как управление сменой полосы движения переходит в состояние ожидания на этапе S129. Таким образом, в настоящем варианте осуществления, когда смена полосы движения продолжается на этапе S129, смена полосы движения приостанавливается, и управление сменой полосы движения переходит в состояние ожидания до тех пор, пока пространство, соответствующее требуемому диапазону, не будет обнаружено снова в диапазоне для перестроения в смежной полосе движения. На этапе S130, истекшее время S2 после инициирования ожидания управления сменой полосы движения измеряется таким способом.
[0106] На этапе S131, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы оценивать требуемое время T3 для перемещения рассматриваемого транспортного средства из текущей позиции в целевую позицию для смены полосы движения. Требуемое время T3 может оцениваться так, как указано на этапе S106.
[0107] На этапе S132, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, превышает или нет полное время (S2+T3) из истекшего времени S2, измеряемого на этапе S130, и требуемого времени T3, оцененного на этапе S131, временной предел Z, полученный на этапе S118. Когда полное время (S2+T3) превышает временной предел Z, процедура переходит к этапу S133, на котором устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы отменять состояние ожидания управления сменой полосы движения и перемещать рассматриваемое транспортное средство в позицию движения рассматриваемого транспортного средства перед инициированием смены полосы движения. После S133 этапа выполняется этап S126, на котором управление сменой полосы движения заканчивается. С другой стороны, когда полное время (S2+T3) не превышает временной предел Z, процедура переходит к этапу S134.
[0108] На этапе S134, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы продолжать состояние ожидания управления сменой полосы движения. После этапа S134 выполняются этапы S135-S138, на которых, аналогично этапам S104 и S106-S109, текущий диапазон для перестроения и диапазон для перестроения после требуемого времени T3 обнаруживаются (этапы S135 и S136), и проводится оценка того, становится или нет диапазон для перестроения небольшим после предварительно определенного времени T3 (этап S137). Когда оценивается то, что диапазон для перестроения становится небольшим после предварительно определенного времени T3 (этап S137="Да"), информация оповещения в отношении того, что диапазон для перестроения становится небольшим, оповещается водителю (этап S138).
[0109] На этапе S139, аналогично этапу S123, выполняется определение в отношении того, существует или нет пространство в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T3. Пространство соответствует требуемому диапазону, скорректированному на этапе S111. Диапазон для перестроения в смежной полосе движения после предварительно определенного времени T3 оценивается на этапе S136. Устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы задавать скорректированный требуемый диапазон в целевой позиции для смены полосы движения. Когда диапазон для перестроения в смежной полосе движения после предварительно определенного времени T3 включает в себя скорректированный требуемый диапазон, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, что существует пространство, соответствующее требуемому диапазону в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T3, и процедура переходит к этапу S140. На этапе S140, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы отменять состояние ожидания управления сменой полосы движения и возобновлять управление сменой полосы движения, поскольку пространство, соответствующее требуемому диапазону, обнаруживается в диапазоне для перестроения в смежной полосе движения. Процесс затем возвращается к этапу S118. С другой стороны, когда выполняется определение в отношении того, что нет пространства, соответствующего требуемому диапазону в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T3, процедура переходит к этапу S141, на котором состояние ожидания управления сменой полосы движения продолжается, и процедура затем возвращается к этапу S130.
[0110] Как описано выше, при определении того, следует или нет разрешать смену полосы движения, устройство 100 управления движением согласно настоящему варианту осуществления задает диапазон в качестве требуемого диапазона в целевой позиции для смены полосы движения. Диапазон имеет размер, равный или больший размера диапазона, который рассматриваемое транспортное средство занимает на поверхности дороги. Устройство 100 управления движением также обнаруживает диапазон, в котором помехи не существуют в то время, когда рассматриваемое транспортное средство завершает смену полосы движения, в качестве диапазона для перестроения. После этого, когда диапазон для перестроения в смежной полосе движения включает в себя требуемый диапазон, устройство 100 управления движением определяет то, что пространство, на которое может сменять полосу движения рассматриваемое транспортное средство, существует в смежной полосе движения, и разрешает смену полосы движения. Таким образом, в настоящем варианте осуществления, диапазон для перестроения, в котором помехи не существуют в то время, когда рассматриваемое транспортное средство, завершает смену полосы движения, и требуемый диапазон, необходимый для рассматриваемого транспортного средства, чтобы сменять полосу движения, сравниваются, чтобы за счет этого обеспечивать возможность надлежащего выполнения определения в отношении того, должна или нет выполняться смена полосы движения.
[0111] Кроме того, в настоящем варианте осуществления, когда пространство, соответствующее требуемому диапазону, обнаруживается в диапазоне для перестроения в смежной полосе движения, коррекция выполняется, как проиллюстрировано на фиг. 12 и фиг. 16, для того, чтобы уменьшать требуемый диапазон или увеличивать диапазон для перестроения в смежной полосе движения на основе диапазона для перестроения в следующей полосе движения, смежной со смежной полосой движения (следующей смежной полосе движения). В частности, как проиллюстрировано на фиг. 12 и фиг. 16, пространство (например, пространство, соответствующее требуемому диапазону), на которое может сменять полосу движения находящееся в смежной полосе движения транспортное средство, обнаруживается в диапазоне для перестроения в следующей смежной полосе движения, и когда такое пространство, на которое может сменять полосу движения находящееся в смежной полосе движения транспортное средство, может обнаруживаться в следующей смежной полосе движения, коррекция выполняется для того, чтобы уменьшать требуемый диапазон в направлении движения рассматриваемого транспортного средства или увеличивать диапазон для перестроения в смежной полосе движения в направлении движения рассматриваемого транспортного средства. Через эту операцию, в окружении, в котором следующая смежная полоса движения включает в себя пространство для находящегося в смежной полосе движения транспортного средства, чтобы сменять полосу движения, и находящееся в смежной полосе движения транспортное средство сменяет полосу движения на следующую смежную полосу движения, чтобы за счет этого предоставлять пространство в смежной полосе движения для рассматриваемого транспортного средства, чтобы сменять полосу движения, рассматриваемое транспортное средство может инициировать смену полосы движения до того, как находящееся в смежной полосе движения транспортное средство фактически сменяет полосу движения на следующую смежную полосу движения, и пространство для рассматриваемого транспортного средства, чтобы сменять полосу движения, обнаруживается в смежной полосе движения. Таким образом, рассматриваемое транспортное средство может плавно сменять полосу движения.
[0112] Кроме того, в настоящем варианте осуществления, когда требуемый диапазон корректируется на основе диапазона для перестроения в следующей смежной полосе движения, требуемый диапазон корректируется с учетом ширины дороги следующей смежной полосы движения. В частности, когда ширина дороги следующей смежной полосы движения составляет предварительно определенное расстояние или более, требуемый диапазон задается меньше диапазона, когда ширина дороги следующей смежной полосы движения меньше предварительно определенного расстояния. Через эту операцию, когда ширина дороги следующей смежной полосы движения является большой, и находящееся в смежной полосе движения транспортное средство может легко сменять полосу движения на следующую смежную полосу движения, рассматриваемое транспортное средство также может легко сменять полосу движения на смежную полосу движения. Определение того, должна или нет выполняться смена полосы движения, в силу этого может более надлежащим образом выполняться в соответствии с состоянием следующей смежной полосы движения.
[0113] Второй вариант осуществления
Далее описывается устройство управления движением согласно второму варианту осуществления настоящего изобретения. Устройство 100 управления движением согласно второму варианту осуществления имеет конфигурацию, идентичную конфигурации устройства 100 управления движением согласно первому варианту осуществления, и работает идентично первому варианту осуществления за исключением того, что устройство 100 управления движением работает так, как описано ниже. В частности, во втором варианте осуществления, устройство 100 управления движением выполняет процесс управления сменой полосы движения, проиллюстрированный на фиг. 21, в качестве замены для процесса управления сменой полосы движения, проиллюстрированного на фиг. 5.
[0114] Это описывается подробнее. Когда, на этапе S123, проиллюстрированном на фиг. 4, выполняется определение в отношении того, что пространство, соответствующее требуемому диапазону, не может обнаруживаться в диапазоне для перестроения в смежной полосе движения после предварительно определенного времени T2, процедура переходит к этапу S201, проиллюстрированному на фиг. 21. На этапе S201, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы инициировать управление запросами на смену полосы движения для медленного приближения рассматриваемого транспортного средства к целевой позиции для смены полосы движения. Управление запросами на смену полосы движения представляет собой управление, которое включает в себя медленное приближение рассматриваемого транспортного средства к целевой позиции для смены полосы движения таким образом, что водитель другого транспортного средства, въезжающего в диапазон для перестроения в смежной полосе движения, воспринимает то, что рассматриваемое транспортное средство должно сменять полосу движения, запрашивая у водителя другого транспортного средства предоставление пространства для смены полосы движения, которое включает в себя целевую позицию для смены полосы движения, и разрешение рассматриваемому транспортному средству сменять полосу движения. При управлении запросами на смену полосы движения, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы перемещать рассматриваемое транспортное средство в направлении ширины дороги на более низкой скорости, чем скорость при выполнении обычной смены полосы движения. Например, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы перемещать рассматриваемое транспортное средство в направлении ширины дороги на средней скорости по сравнению со случаем смены полосы движения, чтобы за счет этого медленно приближать рассматриваемое транспортное средство к целевой позиции для смены полосы движения.
[0115] На этапе S201, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы изменять скорость перемещения рассматриваемого транспортного средства в направлении ширины дороги с учетом степени, на которую скорректированный требуемый диапазон отклоняется от диапазона для перестроения после предварительно определенного времени T2. Например, когда степень, на которую скорректированный требуемый диапазон отклоняется от диапазона для перестроения после предварительно определенного времени T2, составляет предварительно определенное значение или более, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы изменять скорость перемещения рассматриваемого транспортного средства в направлении ширины дороги на более низкую скорость, чем скорость, когда степень меньше предварительно определенного значения. Когда степень, на которую скорректированный требуемый диапазон отклоняется от диапазона для перестроения после предварительно определенного времени T2, является большой, другое транспортное средство с большой вероятностью должно въезжать в целевую позицию для смены полосы движения рассматриваемого транспортного средства, соответственно. В таком случае, если рассматриваемое транспортное средство приближается к целевой позиции для смены полосы движения, водитель склонен испытывать беспокойство. Такое тревожное ощущение водителя в отношении другого транспортного средства в силу этого может уменьшаться посредством уменьшения скорости перемещения рассматриваемого транспортного средства в направлении ширины дороги (т.е. за счет более медленного приближения рассматриваемого транспортного средства к целевой позиции для смены полосы движения).
[0116] Помимо этого или альтернативно, на этапе S201, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы изменять скорость перемещения рассматриваемого транспортного средства в направлении ширины дороги в соответствии с позиционной взаимосвязью между разделительными линиями для перестроения и рассматриваемым транспортным средством, обнаруженной на этапе S128. Например, в состоянии, в котором центральная линия рассматриваемого транспортного средства переезжает через разделительные линии, как проиллюстрировано на фиг. 20(C), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать скорость перемещения рассматриваемого транспортного средства в направлении ширины дороги. Эта операция может уменьшать тревожное ощущение водителя, даже когда рассматриваемое транспортное средство перемещается в целевую позицию для смены полосы движения в состоянии, в котором рассматриваемое транспортное средство и другое транспортное средство находятся близко друг к другу, так что они могут приближаться друг к другу. Помимо этого или альтернативно, в состоянии, в котором центральная линия рассматриваемого транспортного средства переезжает через разделительные линии, устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы задавать скорость перемещения равной 0, т.е. поддерживать позицию рассматриваемого транспортного средства в направлении ширины дороги (т.е. ожидать в текущей позиции) вместо варьирования позиции. Это позволяет уменьшать тревожное ощущение водителя, поскольку рассматриваемое транспортное средство не приближается к другому транспортному средству.
[0117] Процессы на этапах S202-S205 являются идентичными процессам на этапах S135-S138, так что описание опускается. Затем на этапе S206, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, становится или нет расстояние между рассматриваемым транспортным средством и другим транспортным средством предварительно определенным расстоянием или менее в результате управления запросами на смену полосы движения, выполняемого на этапе S201, для медленного приближения рассматриваемого транспортного средства к находящемуся в смежной полосе движения транспортному средству. Расстояние между рассматриваемым транспортным средством и другим транспортным средством, используемое в этом случае, может представлять собой прямое расстояние или расстояние в направлении ширины дороги. Когда расстояние между рассматриваемым транспортным средством и другим транспортным средством превышает предварительно определенное расстояние, процедура переходит к этапу S207, на котором устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы определять то, прибывает или нет рассматриваемое транспортное средство в целевую позицию для смены полосы движения. Когда рассматриваемое транспортное средство не прибывает в целевую позицию для смены полосы движения, процедура возвращается к этапу S202, чтобы продолжать управление запросами на смену полосы движения. Когда рассматриваемое транспортное средство прибывает в целевую позицию для смены полосы движения, процедура возвращается к этапу S126, чтобы заканчивать управление сменой полосы движения.
[0118] Когда, на этапе S206, выполняется определение в отношении того, что расстояние между рассматриваемым транспортным средством и другим транспортным средством становится предварительно определенным расстоянием или меньше, процедура переходит к этапу S208. На этапе S208, устройство 190 управления использует функцию управления сменой полосы движения для того, чтобы отменять управление запросами на смену полосы движения, инициируемое на этапе S201, и процедура затем переходит к этапу S126, чтобы отменять управление сменой полосы движения. Даже когда рассматриваемое транспортное средство приближается к целевой позиции для смены полосы движения, водитель другого транспортного средства не может обязательно предоставлять пространство, необходимое для смены полосы движения, и рассматриваемое транспортное средство может приближаться к другому транспортному средству в некоторой степени. В таком случае, управление запросами на смену полосы движения может отменяться, чтобы за счет этого обеспечивать возможность рассматриваемому транспортному средству безопасно двигаться.
[0119] На этапе S206, устройство 190 управления также может использовать функцию управления сменой полосы движения для того, чтобы задавать вышеуказанную переменную предварительно определенного расстояния в соответствии с "уровнем необходимости смены полосы движения" в окружении, в котором движется рассматриваемое транспортное средство. Например, когда "уровень необходимости смены полосы движения" в окружении движения рассматриваемого транспортного средства является высоким (уровень необходимости составляет предварительно определенное значение или более), устройство 190 управления может использовать функцию управления сменой полосы движения для того, чтобы уменьшать вышеуказанное предварительно определенное расстояние по сравнению со случаем, в котором "уровень необходимости смены полосы движения" в окружении движения рассматриваемого транспортного средства является низким (уровень необходимости меньше предварительно определенного значения). Это обеспечивает возможность рассматриваемому транспортному средству приближаться к целевой позиции для смены полосы движения в окружении движения, в котором "уровень необходимости смены полосы движения" является высоким. Соответственно, находящееся в смежной полосе движения транспортное средство может информироваться в отношении такого намерения, что рассматриваемое транспортное средство должно сменять полосу движения, и смена полосы движения на смежную полосу движения может легко выполняться.
[0120] Как описано выше, во втором варианте осуществления, когда пространство, соответствующее требуемому диапазону, не может обнаруживаться в диапазоне для перестроения в смежной полосе движения, управление запросами на смену полосы движения выполняется для медленного приближения рассматриваемого транспортного средства к целевой позиции для смены полосы движения. Это обеспечивает возможность водителю находящегося в смежной полосе движения транспортного средства информироваться в отношении намерения сменить полосу движения рассматриваемого транспортного средства, даже когда пространство, соответствующее требуемому диапазону, не может обнаруживаться в диапазоне для перестроения в смежной полосе движения. Как результат, водитель смежной полосы движения может предоставлять пространство, необходимое для смены полосы движения рассматриваемого транспортного средства, и смена полосы движения в силу этого может надлежащим образом выполняться.
[0121] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0122] Например, в вышеописанных одном или более вариантов осуществления настоящего изобретения, примерно иллюстрируется конфигурация, в которой требуемый диапазон сравнивается с диапазоном для перестроения в смежной полосе движения в то время, когда рассматриваемое транспортное средство завершает смену полосы движения, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, требуемый диапазон сравнивается с диапазоном для перестроения в смежной полосе движения в текущий момент времени.
[0123] В вышеописанных одном или более вариантов осуществления настоящего изобретения, примерно иллюстрируется конфигурация, в которой когда окружение движения рассматриваемого транспортного средства соответствует множеству окружений движения, проиллюстрированных на фиг. 2, окружение движения, в котором уровень необходимости смены полосы движения является наибольшим, определяется в качестве окружения движения рассматриваемого транспортного средства, и смена полосы движения выполняется в "направлении смены полосы движения" в окружении движения, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, когда окружение движения рассматриваемого транспортного средства соответствует множеству окружений движения, проиллюстрированных на фиг. 2, "направление смены полосы движения" в каждом окружении движения указывается в качестве направления вправо или направления влево, и смена полосы движения выполняется в направлении вправо, если "направление смены полосы движения" представляет собой направление вправо в большем числе окружений движения, в то время как смена полосы движения выполняется в направлении влево, если "направление смены полосы движения" представляет собой направление влево в большем числе окружений движения.
[0124] В вышеописанных одном или более вариантов осуществления настоящего изобретения, примерно иллюстрируется конфигурация, в которой временной предел Z для каждого окружения движения сохраняется в таблице, как проиллюстрировано на фиг. 2, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой временной предел Z вычисляется, например, на основе уровня необходимости смены полосы движения, сохраненного в таблице, проиллюстрированной на фиг. 2. В этом случае, временной предел Z может задаваться большим по мере того, как уровень необходимости смены полосы движения является более высоким. Также может использоваться еще одна другая конфигурация, в которой конкретное время для каждого окружения движения сохраняется в качестве временного предела Z в таблице.
[0125] В вышеописанных одном или более вариантов осуществления настоящего изобретения, примерно иллюстрируется конфигурация, в которой диапазон без помех в смежной полосе движения обнаруживается в качестве диапазона для перестроения, и диапазон без помех в следующей смежной полосе движения также обнаруживается в качестве диапазона для перестроения, как проиллюстрировано на фиг. 6A(C), но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, диапазон без помех в смежной полосе движения обнаруживается в качестве первого диапазона для перестроения, в то время как диапазон без помех в следующей смежной полосе движения обнаруживается в качестве второго диапазона для перестроения таким образом, что диапазон для перестроения в смежной полосе движения и диапазон для перестроения в следующей смежной полосе движения обнаруживаются отдельно.
[0126] В вышеописанных одном или более вариантов осуществления настоящего изобретения, примерно иллюстрируется конфигурация, в которой требуемый диапазон уменьшается, или диапазон для перестроения в смежной полосе движения увеличивается, когда следующая смежная полоса движения включает в себя пространство для находящегося в смежной полосе движения транспортного средства, чтобы сменять полосу движения, но также может использоваться другая конфигурация, в которой, например, даже когда пространство для находящегося в смежной полосе движения транспортного средства, чтобы сменять полосу движения, обнаруживается в следующей смежной полосе движения, требуемый диапазон увеличивается, или диапазон для перестроения в смежной полосе движения уменьшается, по меньшей мере, в одном случае из случая, в котором смежная полоса движения перегорожена впереди, случая, в котором транспортное средство аварийной службы приближается, случая, в котором паркующееся транспортное средство существует впереди в смежной полосе движения, случая, в котором скорость транспортного средства для находящегося в смежной полосе движения транспортного средства, движущегося впереди в смежной полосе движения, ниже скорости транспортного средства для рассматриваемого транспортного средства, и случая, в котором скорость транспортного средства для находящегося в смежной полосе движения транспортного средства, движущегося позади в смежной полосе движения, выше скорости транспортного средства для рассматриваемого транспортного средства. В таком окружении движения, которое не является подходящим для смены полосы движения, требуемый диапазон увеличивается, или диапазон для перестроения в смежной полосе движения уменьшается, и за счет этого можно надлежащим образом определять то, должна или нет выполняться смена полосы движения, в соответствии с окружением движения.
[0127] В вышеописанных одном или более вариантов осуществления настоящего изобретения, примерно иллюстрируется конфигурация, в которой требуемый диапазон или диапазон для перестроения в смежной полосе движения корректируются на основе диапазона для перестроения в следующей смежной полосе движения, но эта конфигурация может модифицироваться таким образом, что направление движения находящегося в смежной полосе движения транспортного средства оценивается на основе скорости и/или ускорения транспортного средства для находящегося в смежной полосе движения транспортного средства, чтобы оценивать то, сменяет или нет находящееся в смежной полосе движения транспортное средство полосу движения на следующую смежную полосу движения, и когда может оцениваться то, что находящееся в смежной полосе движения транспортное средство сменяет полосу движения на следующую смежную полосу движения, требуемый диапазон уменьшается, или диапазон для перестроения в смежной полосе движения увеличивается. С таким учетом направления движения находящегося в смежной полосе движения транспортного средства, определение того, предоставляется или нет пространство для смены полосы движения в смежной полосе движения, может выполняться с более высокой степенью точности.
[0128] В вышеописанном втором варианте осуществления, примерно иллюстрируется конфигурация, в которой управление запросами на смену полосы движения выполняется для медленного приближения рассматриваемого транспортного средства к целевой позиции для смены полосы движения, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, управление запросами на смену полосы движения выполняется для медленного приближения рассматриваемого транспортного средства к смежной полосе движения. Также в этом случае, водитель находящегося в смежной полосе движения транспортного средства может информироваться в отношении намерения сменить полосу движения рассматриваемого транспортного средства, и пространство, необходимое для смены полосы движения, в силу этого может обеспечиваться.
[0129] Датчики 110 в вышеописанных вариантах осуществления соответствуют первому детектору и второму детектору настоящего изобретения, и устройство 190 управления соответствует устройству управления движением настоящего изобретения.
Описание номеров ссылок
[0130] 100 - устройство управления движением
110 - датчики
120 - устройство обнаружения позиции рассматриваемого транспортного средства
130 - картографическая база данных
140 - бортовое оборудование
150 - устройство выдачи оповещений
160 - устройство ввода
170 - устройство связи
180 - устройство управления приведением в движение
190 - устройство управления
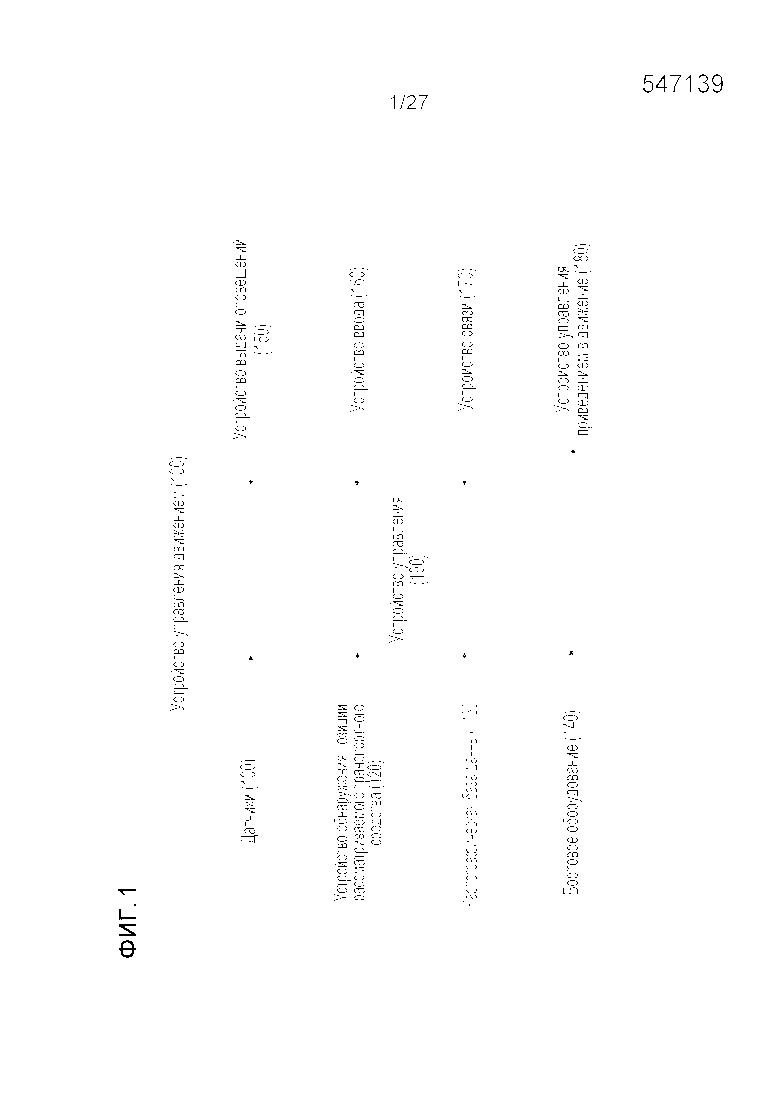
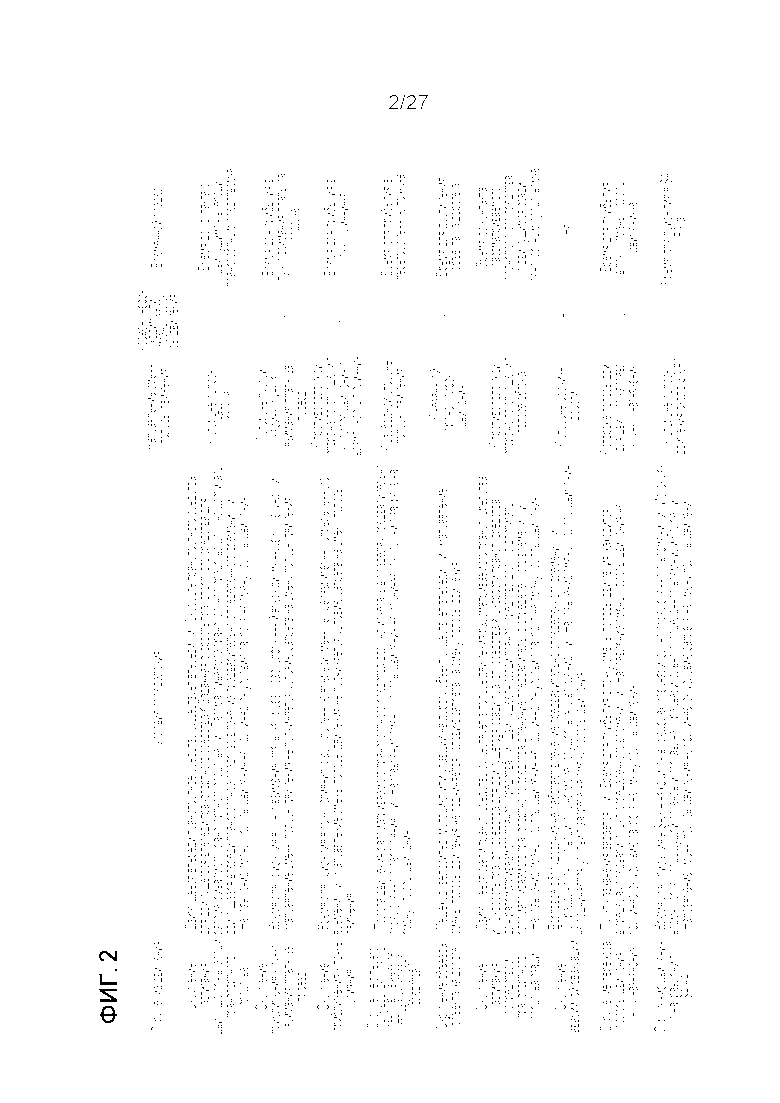
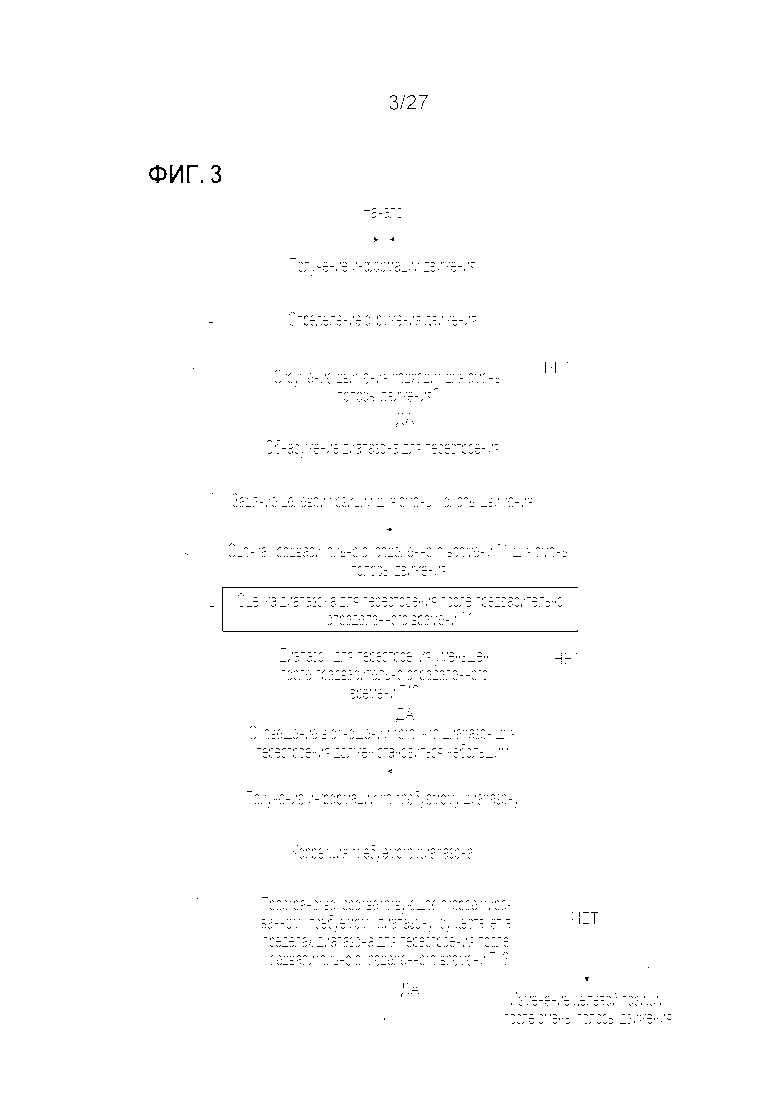
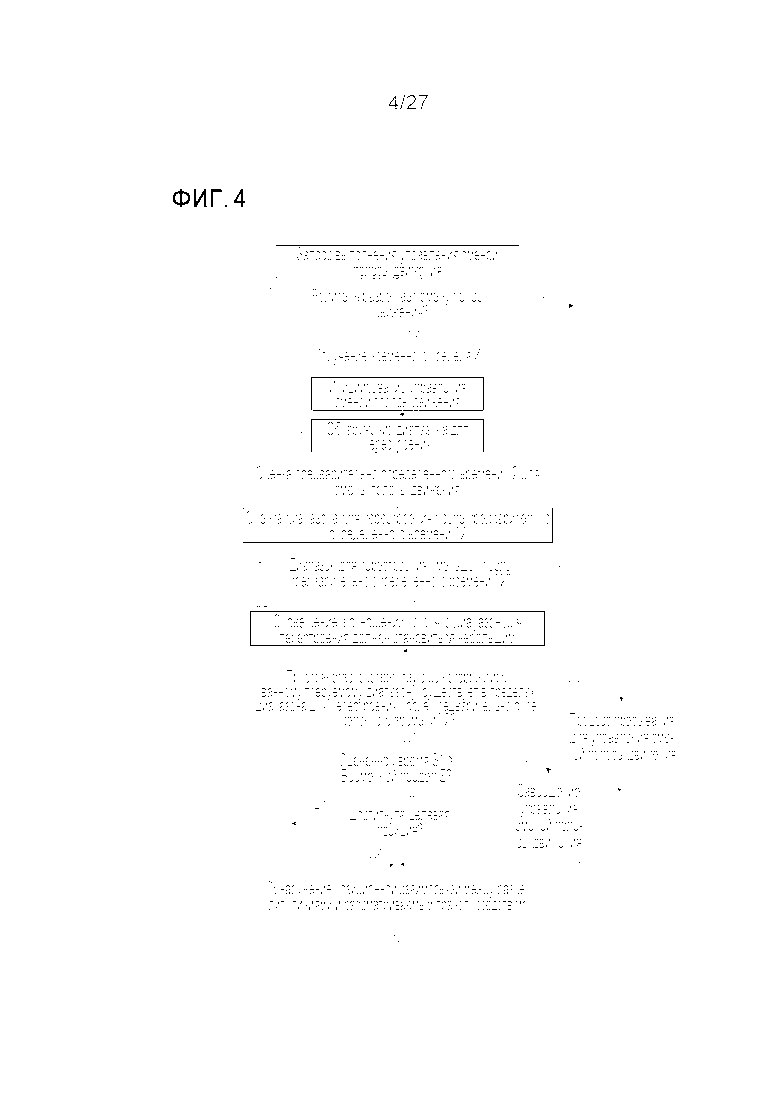
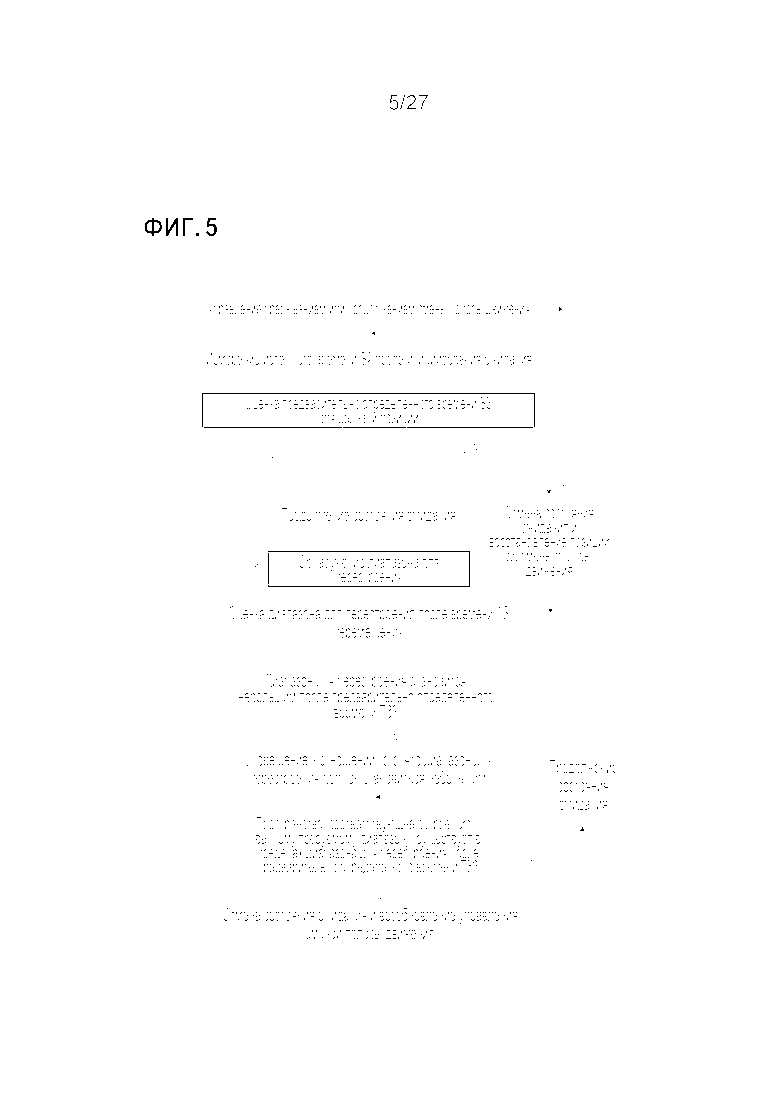
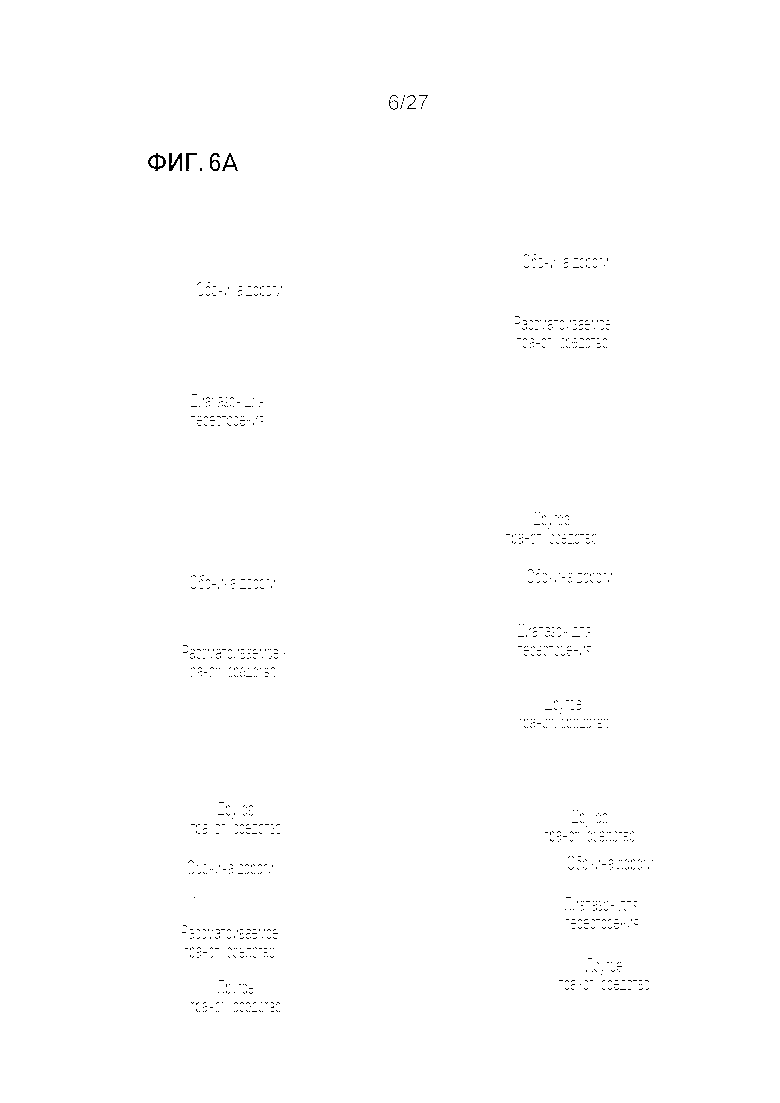
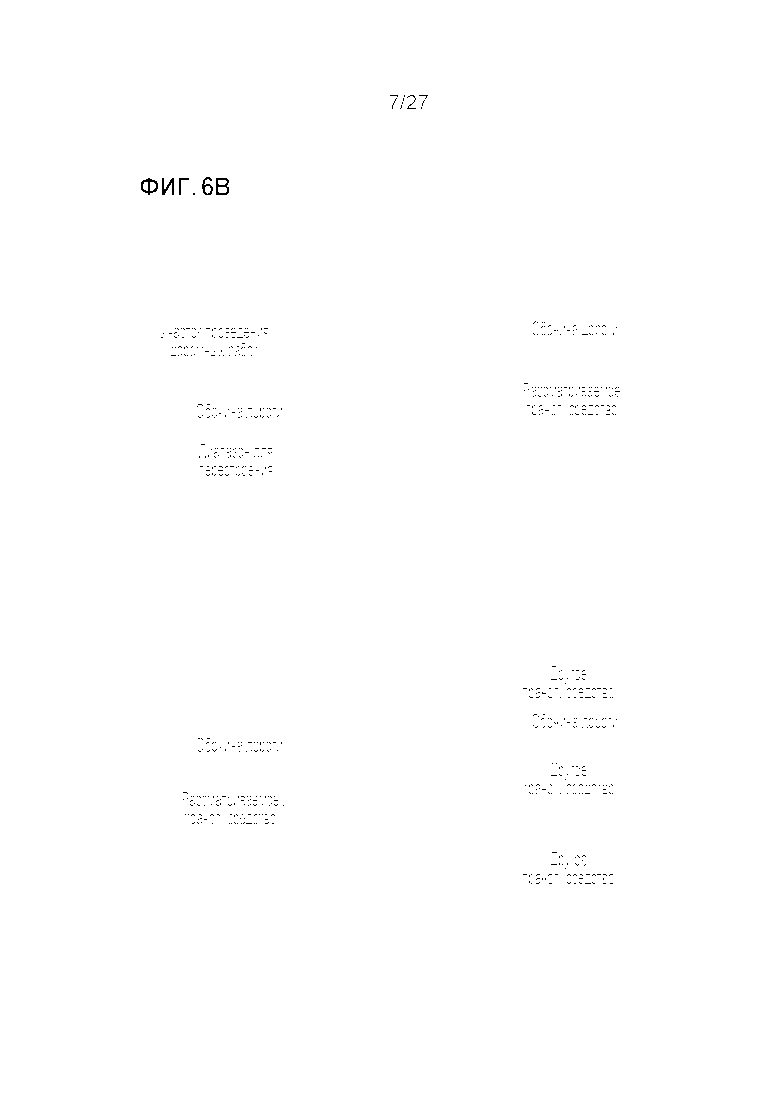
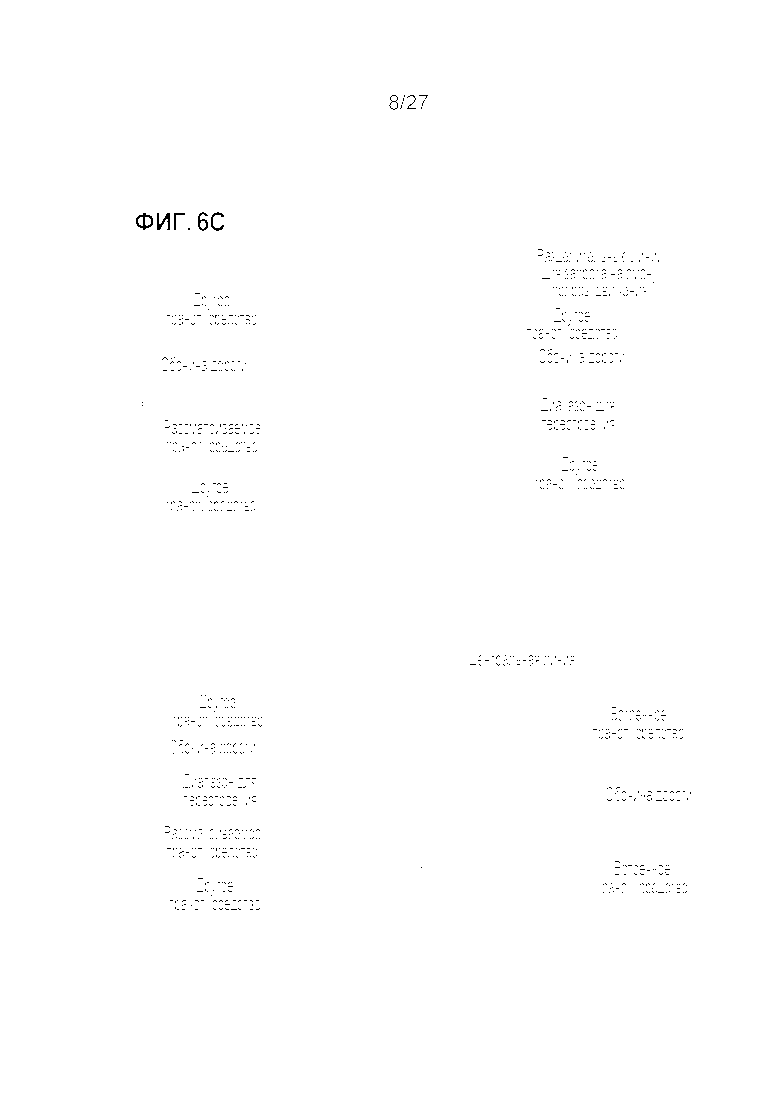
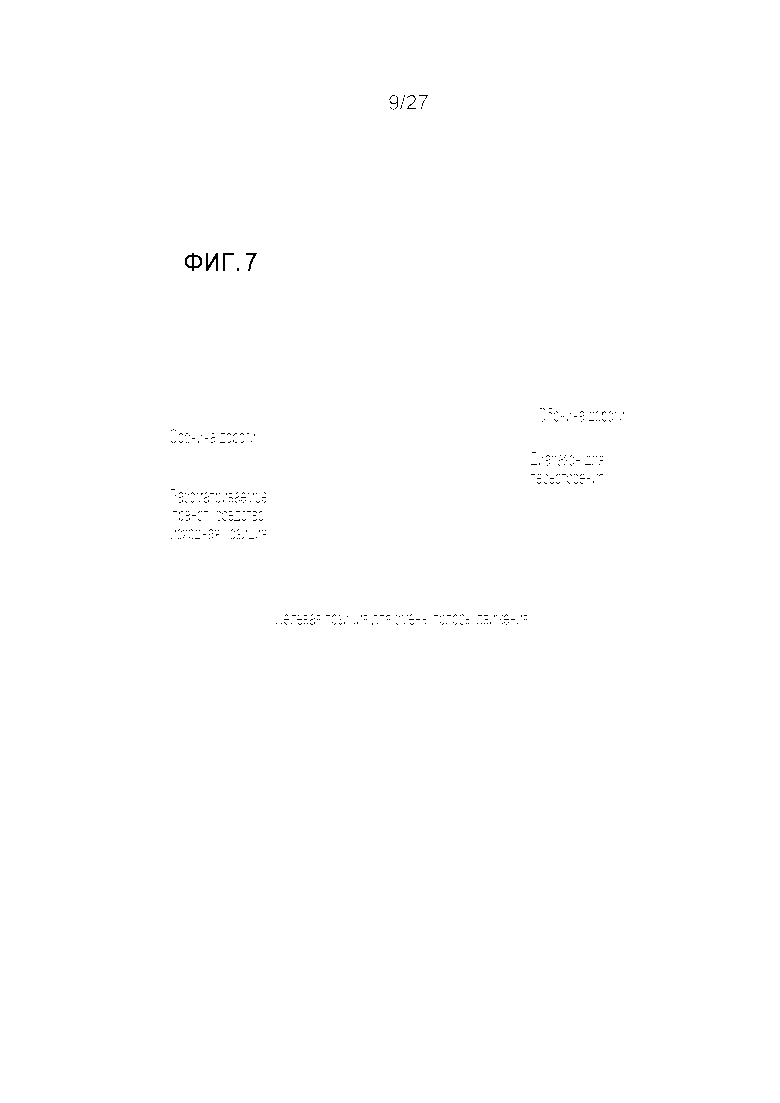
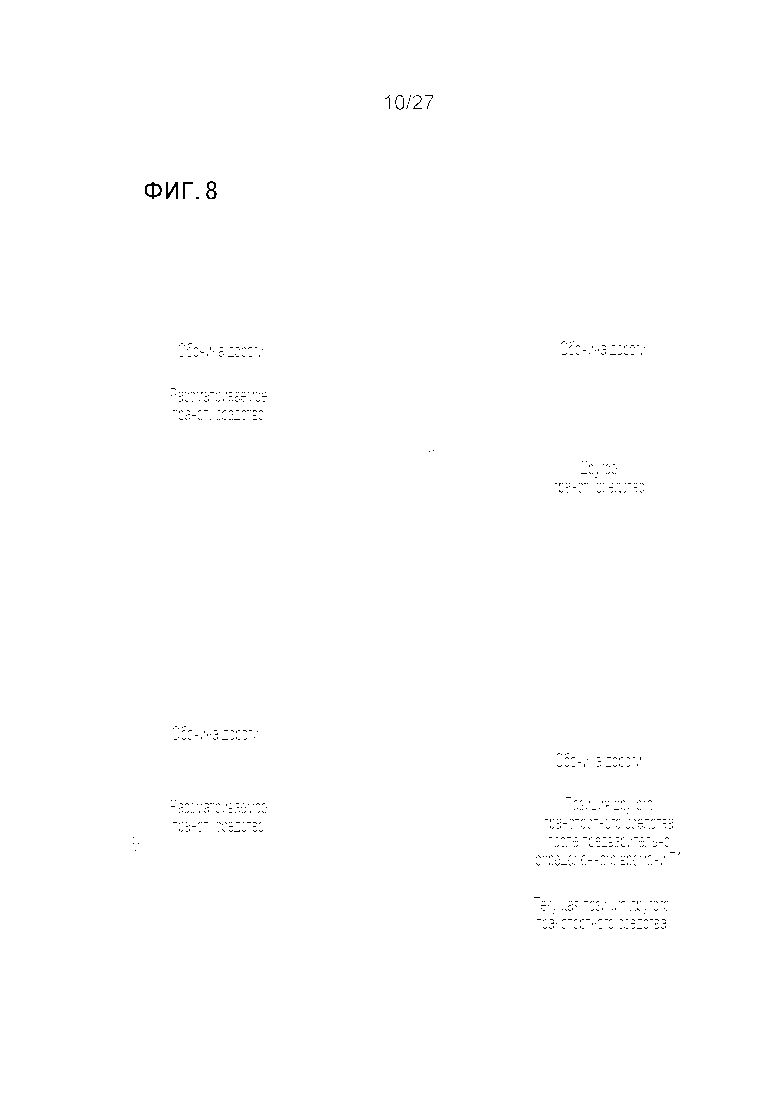
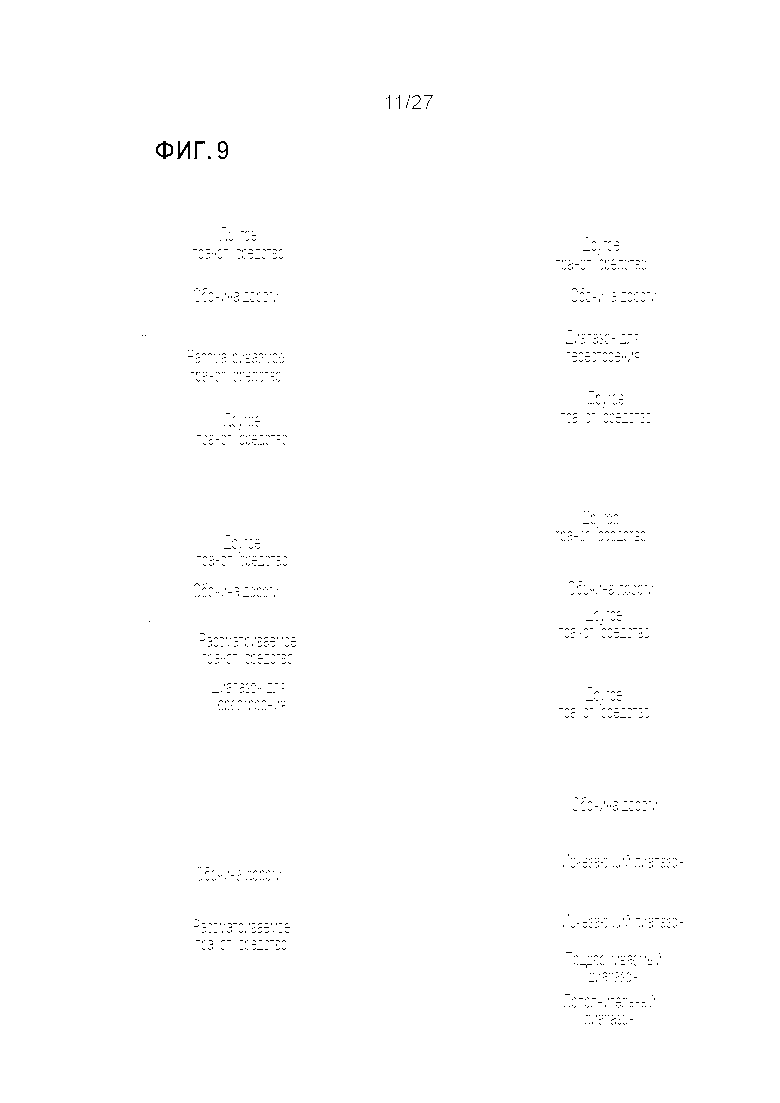
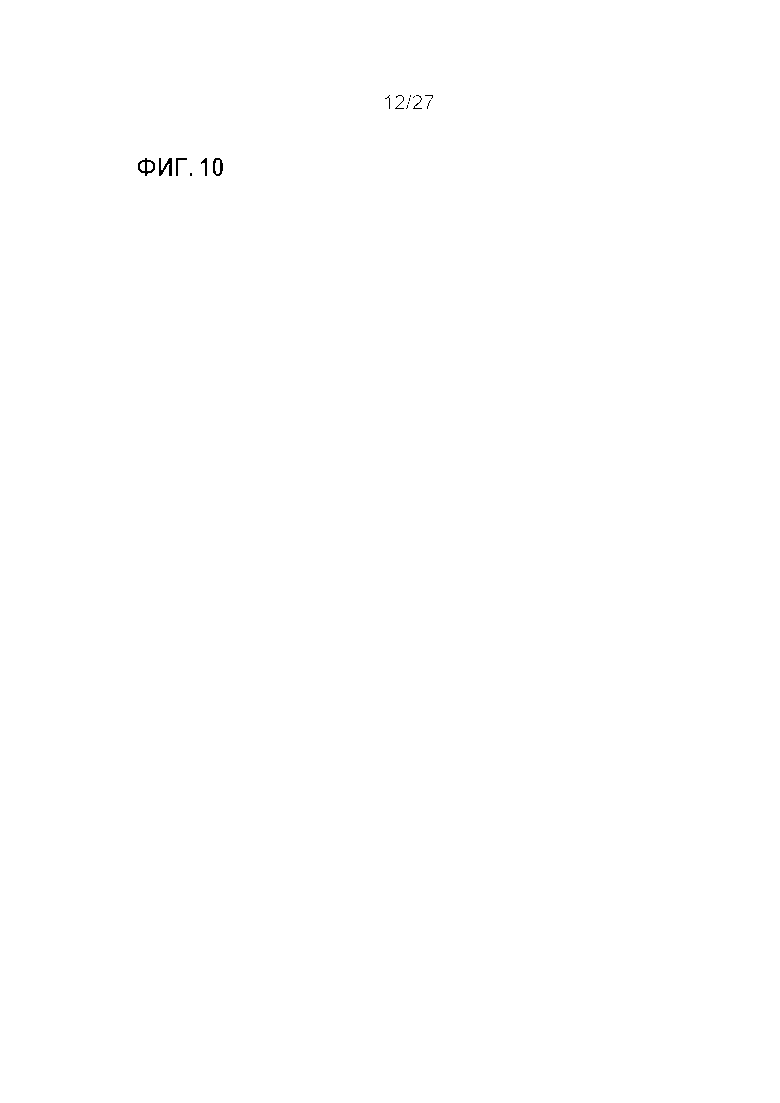
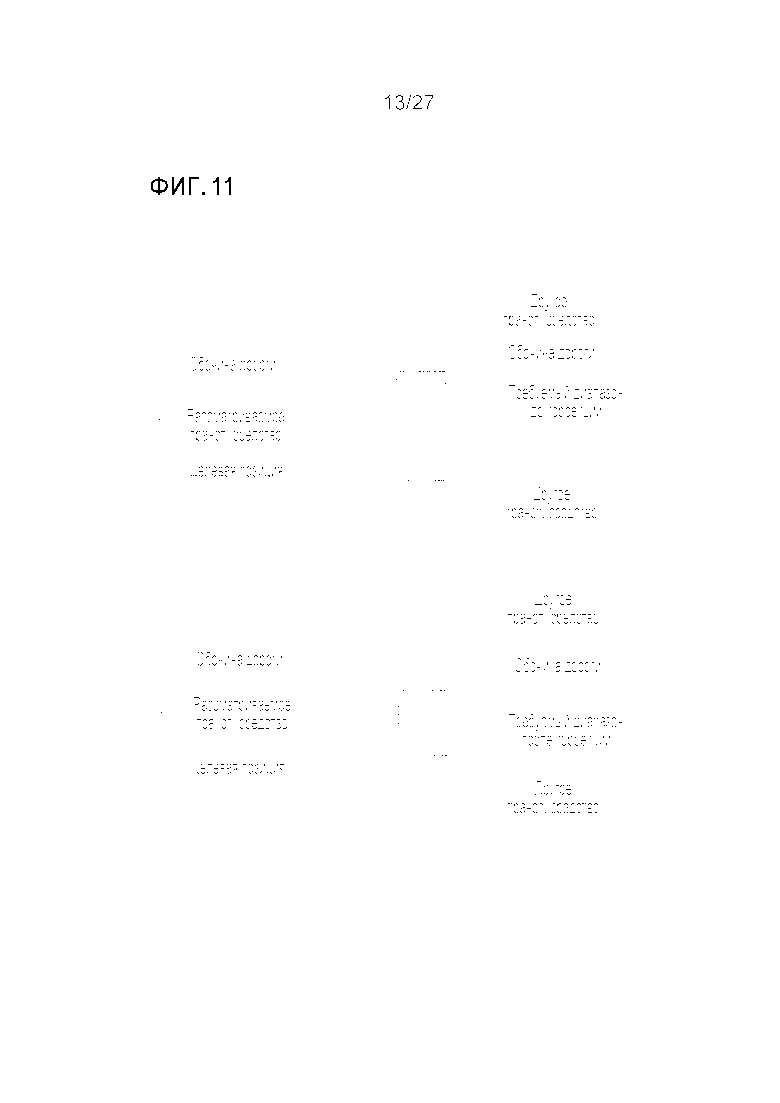
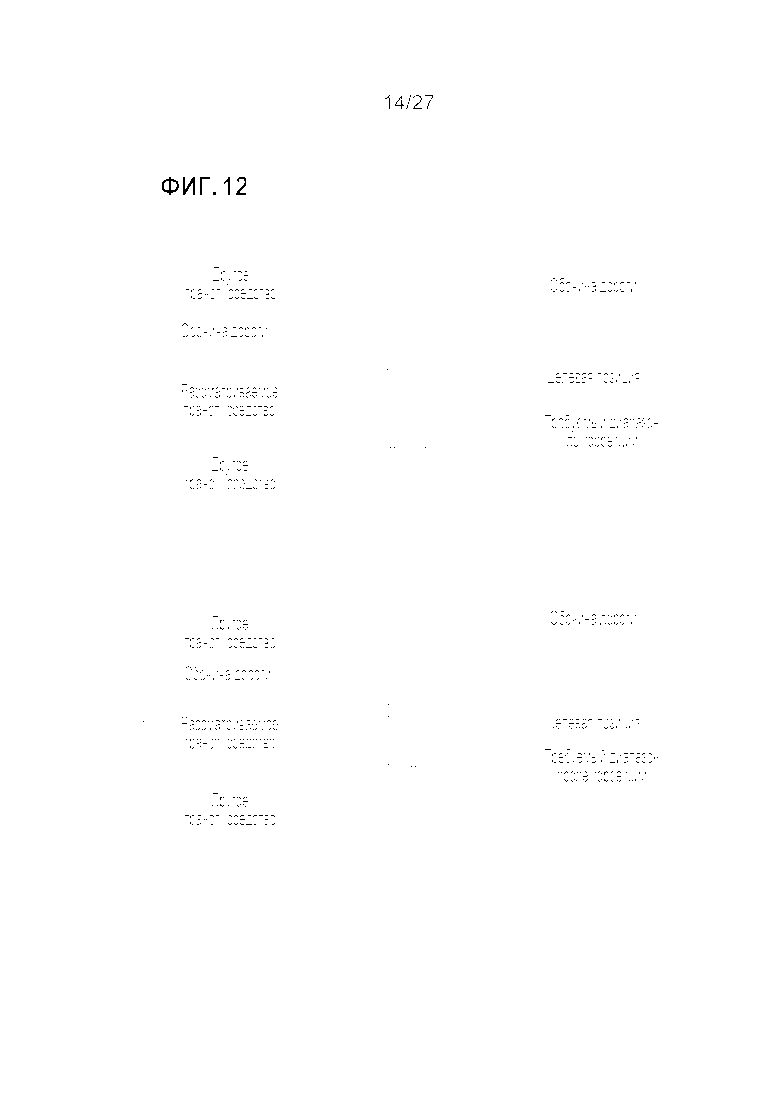
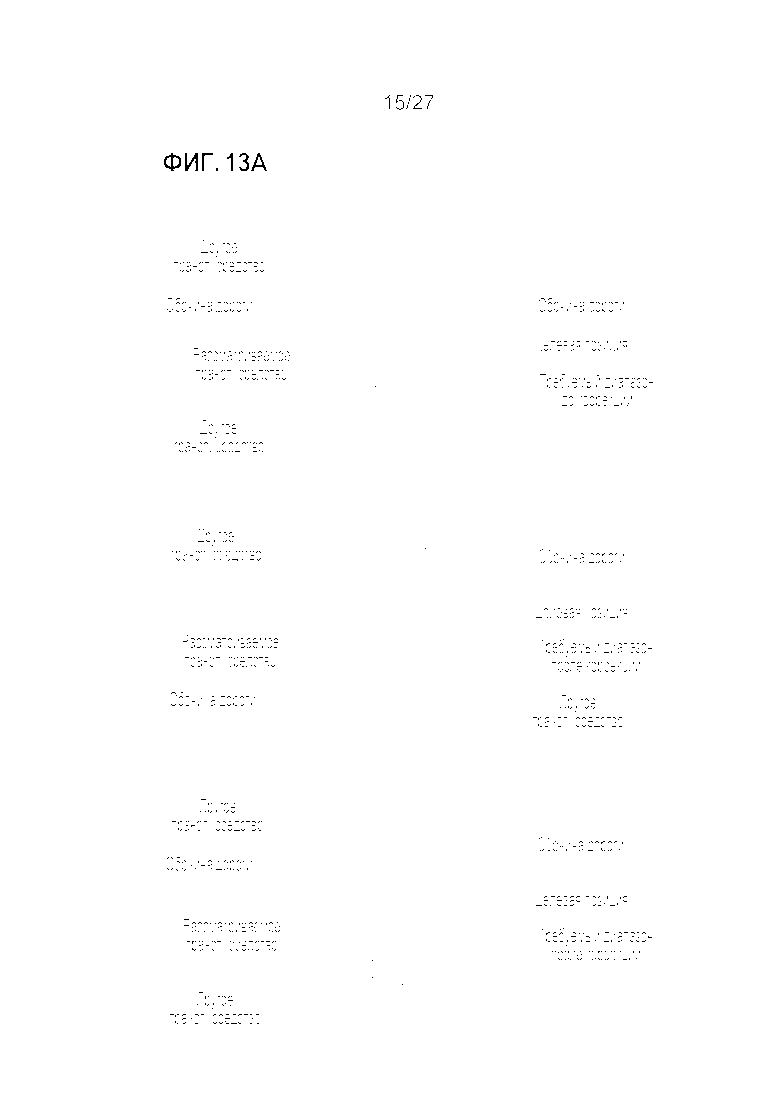
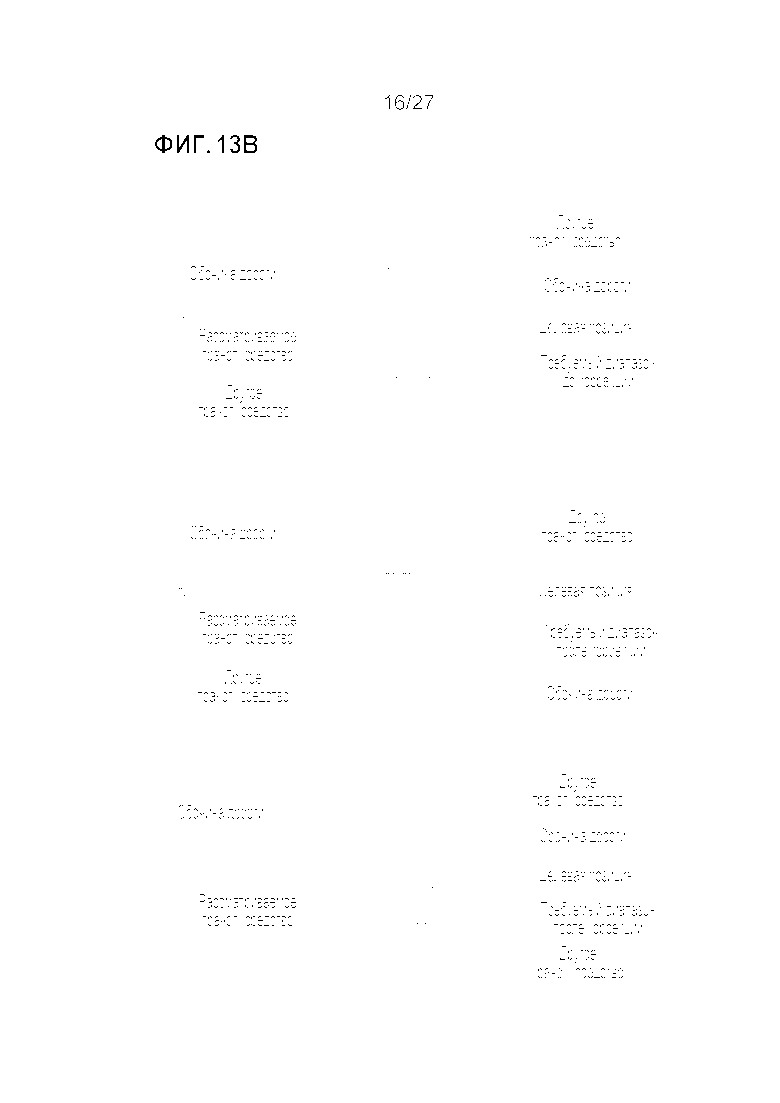
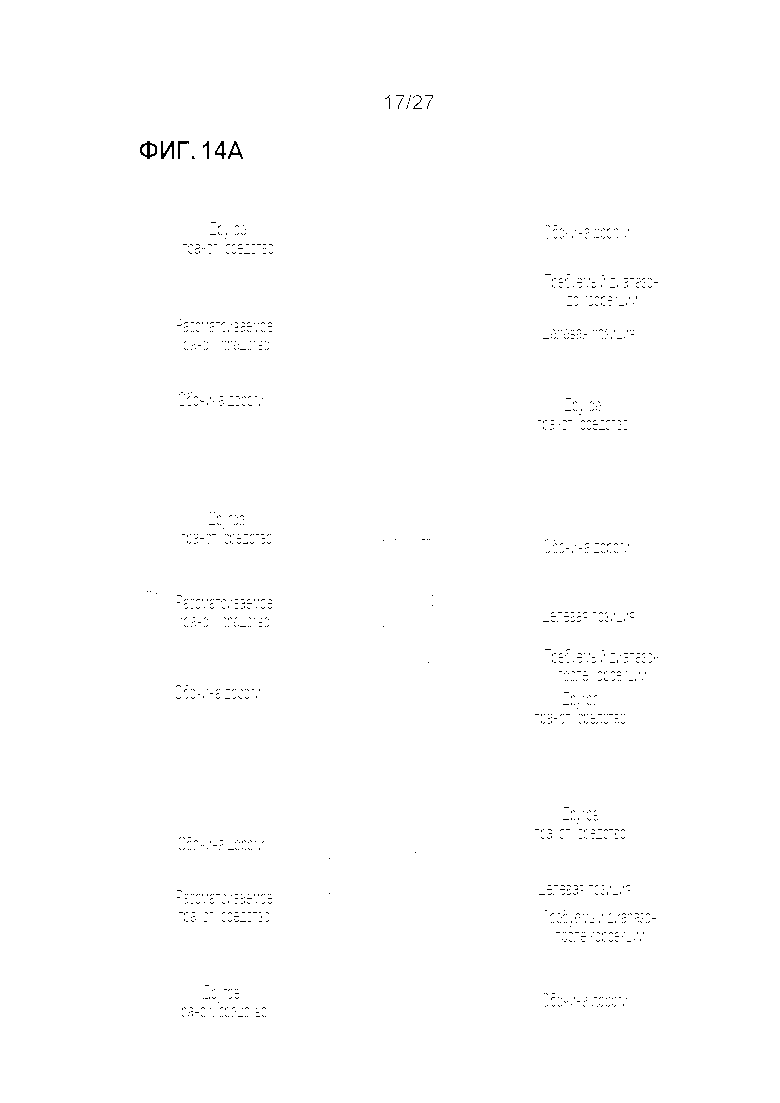
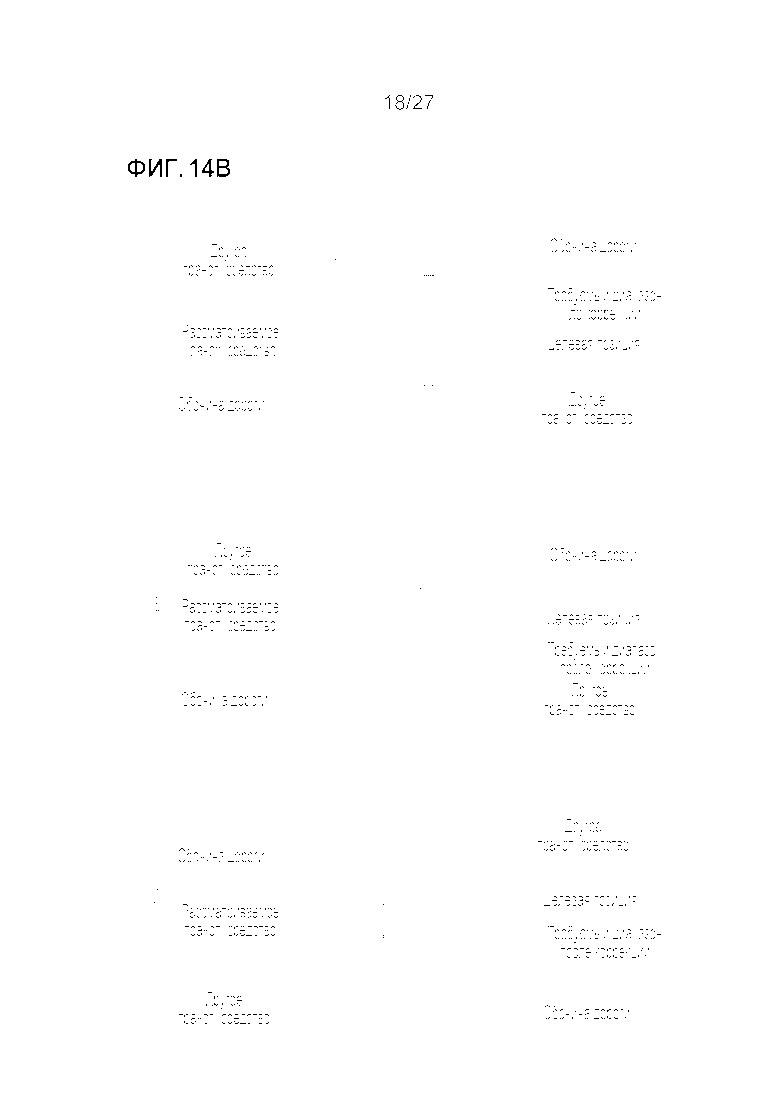
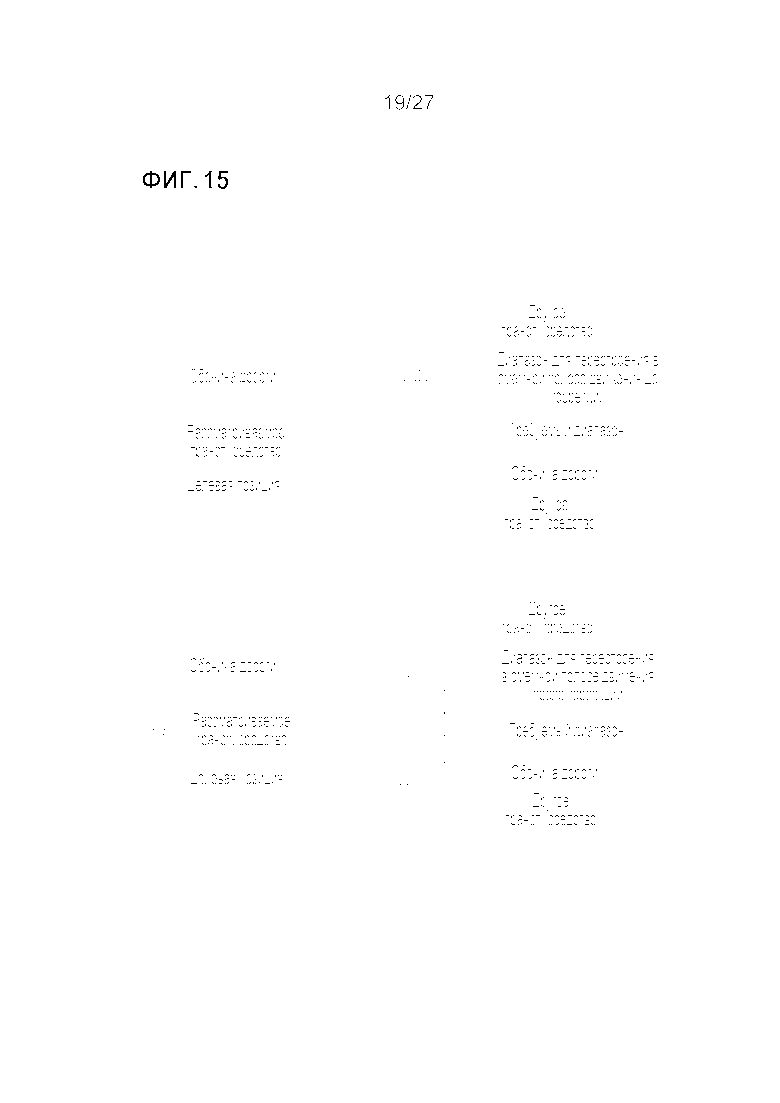
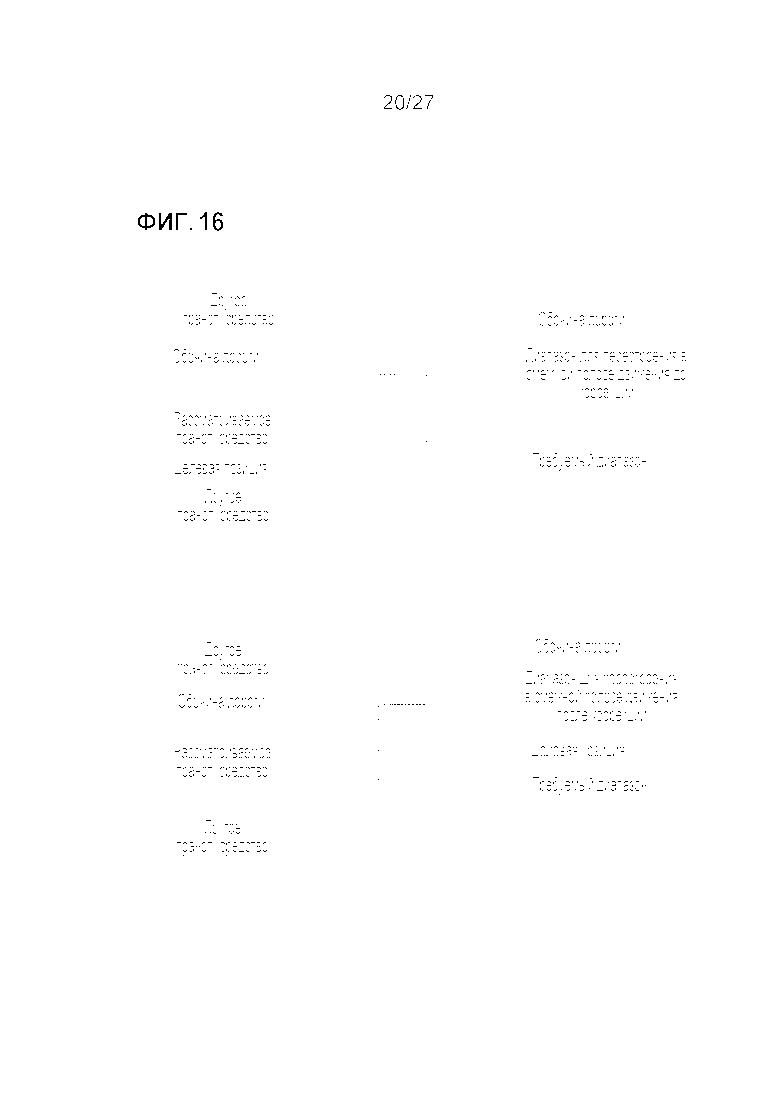
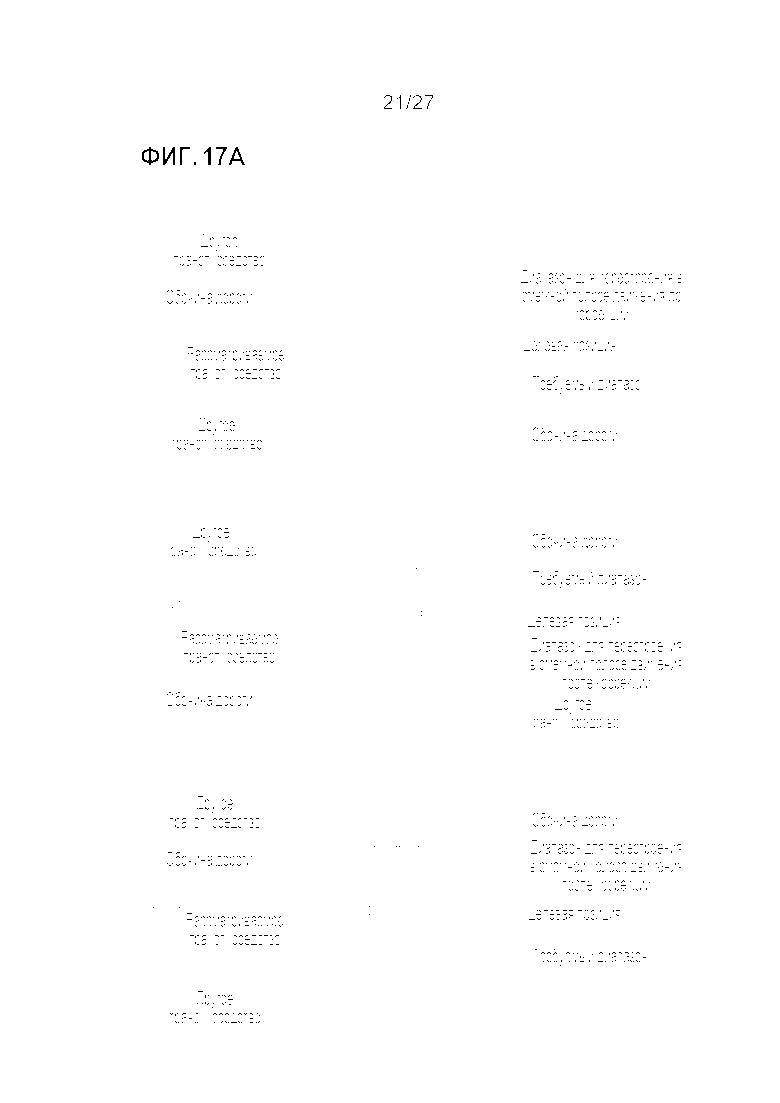
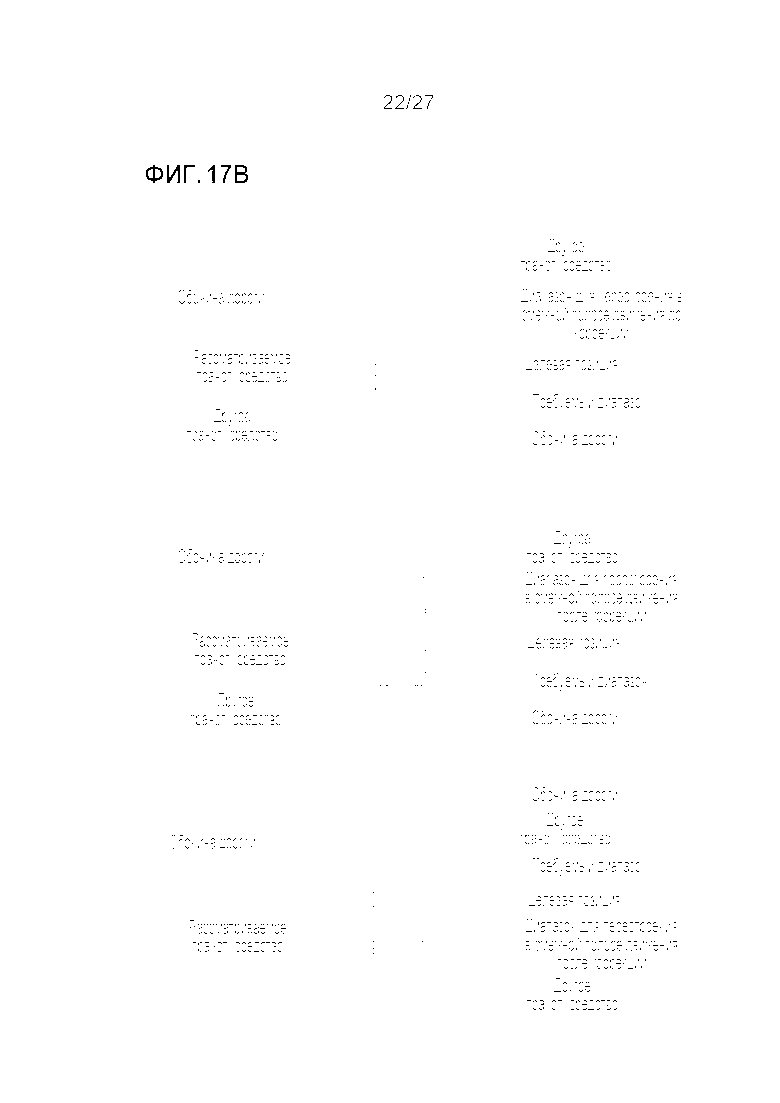
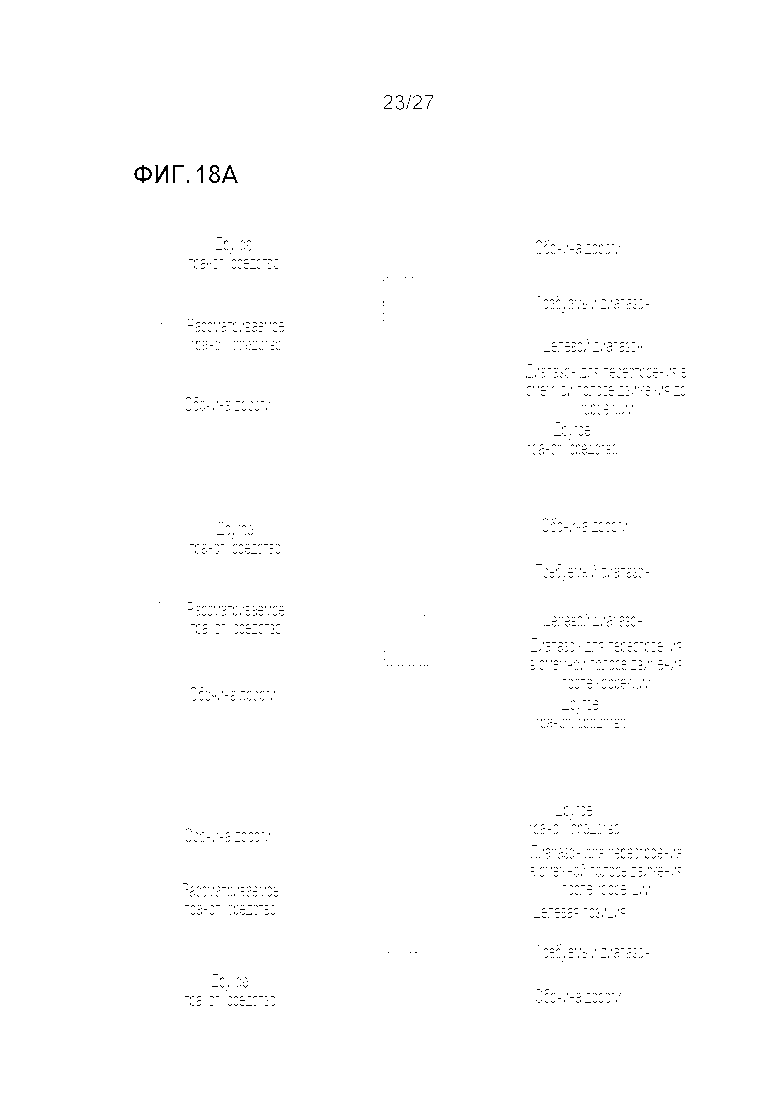
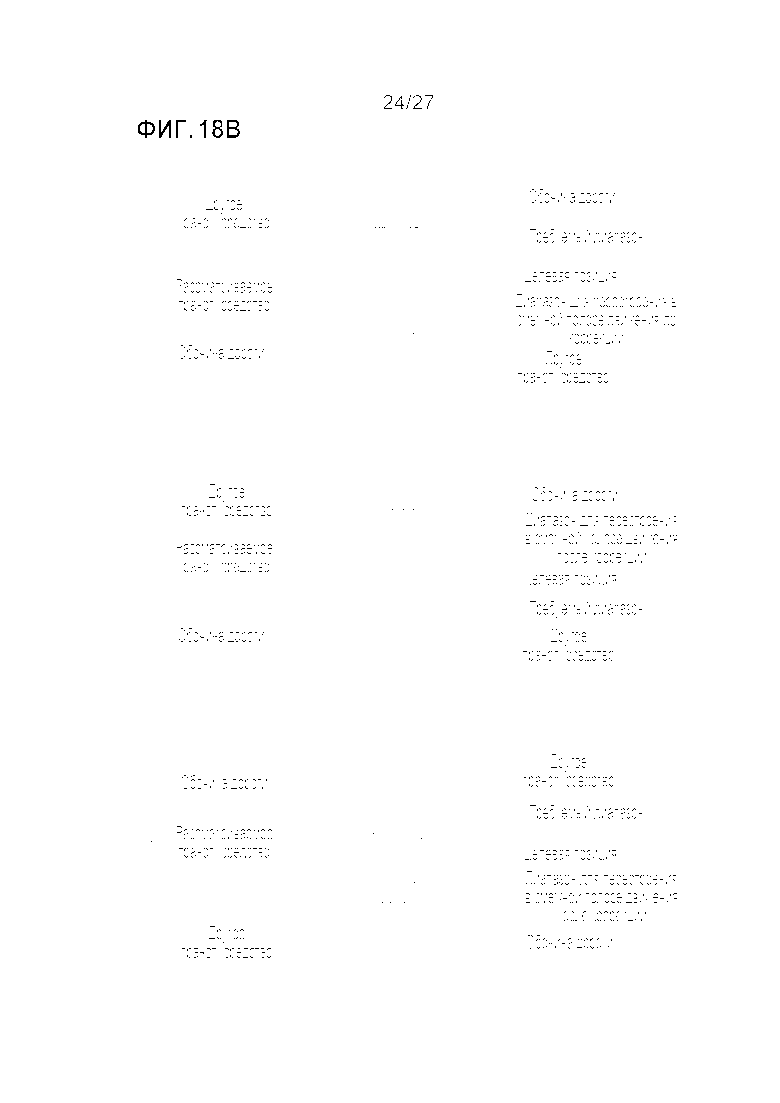
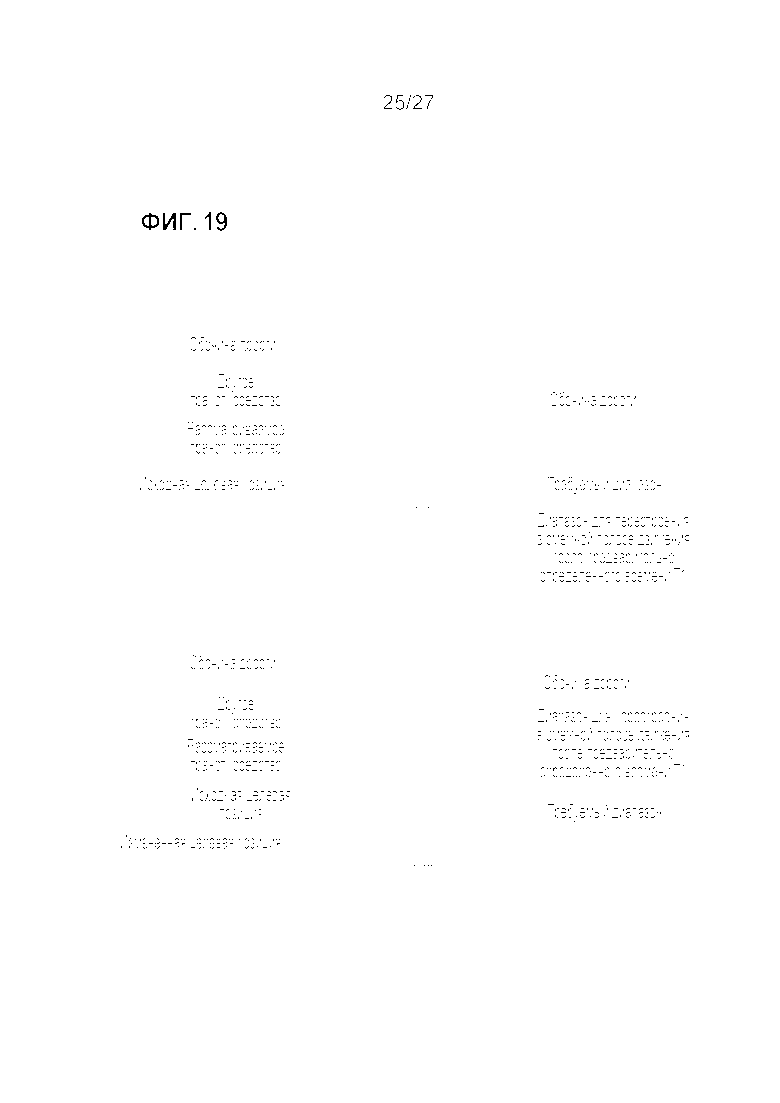
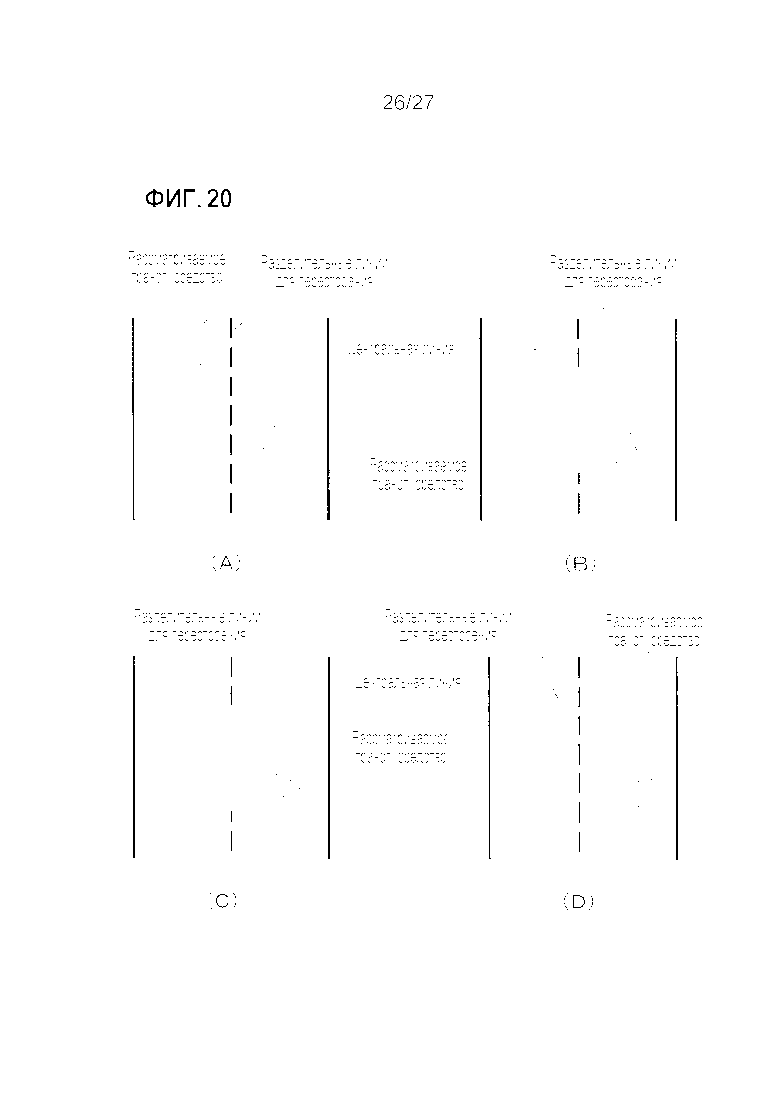
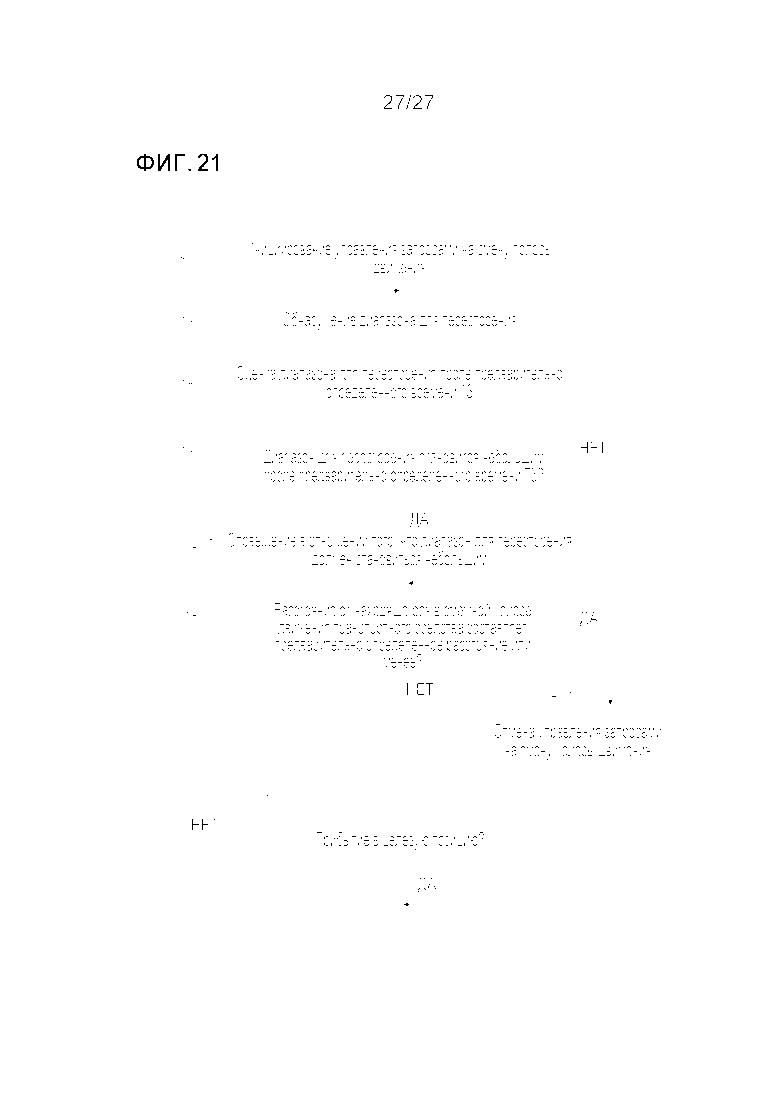
Группа изобретений относится к способу и устройству управления движением транспортного средства. Способ осуществляется посредством устройства управления движением. Устройство управления движением содержит первый, второй и третий детекторы и контроллер. Первый детектор выполнен с возможностью обнаруживать помеху рядом с рассматриваемым транспортным средством, движущимся в первой полосе движения. Второй детектор выполнен с возможностью обнаруживать вторую полосу движения, смежную с первой полосой движения. Третий детектор выполнен с возможностью обнаруживать третью полосу движения, следующую и смежную со второй полосой движения. Устройство управления движением выполнено с возможностью: 1) задавать первый диапазон для смены полосы движения во второй полосе движения, при этом первый диапазон имеет размер, равный или больший размера, который рассматриваемое транспортное средство занимает на поверхности дороги; 2) обнаруживать диапазон во второй полосе движения в качестве второго диапазона, при этом диапазон во второй полосе движения расположен сбоку от рассматриваемого транспортного средства, при этом помеха отсутствует в диапазоне во второй полосе движения; 3) разрешать рассматриваемому транспортному средству сменять полосу движения, когда второй диапазон полностью включает в себя первый диапазон. Достигается предоставление способа и устройства управления транспортным средством для автоматической смены полосы движения. 2 н. и 3 з.п. ф-лы, 58 ил.
1. Способ управления движением транспортного средства, осуществляемый посредством устройства управления движением, причем устройство управления движением содержит:
первый детектор, выполненный с возможностью обнаруживать помеху рядом с рассматриваемым транспортным средством, движущимся в первой полосе движения;
второй детектор, выполненный с возможностью обнаруживать вторую полосу движения, смежную с первой полосой движения, и
третий детектор, выполненный с возможностью обнаруживать третью полосу движения, следующую и смежную со второй полосой движения,
причем устройство управления движением выполнено с возможностью:
- задавать первый диапазон в целевой позиции для смены полосы движения во второй полосе движения, причем первый диапазон имеет размер, равный или больший размера, который рассматриваемое транспортное средство занимает на поверхности дороги;
- обнаруживать диапазон во второй полосе движения в качестве второго диапазона, причем диапазон во второй полосе движения расположен сбоку от рассматриваемого транспортного средства, причем помеха отсутствует в диапазоне во второй полосе движения; и
- разрешать рассматриваемому транспортному средству сменять полосу движения, когда второй диапазон полностью включает в себя первый диапазон,
при этом способ управления движением содержит:
- первый этап, на котором обнаруживают диапазон в третьей полосе движения в качестве третьего диапазона, причем диапазон в третьей полосе движения расположен сбоку от рассматриваемого транспортного средства, причем помеха отсутствует в диапазоне в третьей полосе движения; и
- второй этап, на котором выполняют коррекцию, чтобы уменьшать первый диапазон или увеличивать второй диапазон, когда третий диапазон имеет размер, равный или больший предварительно определенного диапазона, по сравнению с тем, когда третий диапазон имеет размер, меньший предварительно определенного диапазона.
2. Способ управления движением по п. 1, в котором второй этап включает в себя этап, на котором выполняют коррекцию, чтобы уменьшать длину первого диапазона в направлении движения рассматриваемого транспортного средства или увеличивать длину второго диапазона в направлении движения рассматриваемого транспортного средства, когда третий диапазон имеет размер, равный или больший предварительно определенного диапазона, по сравнению с тем, когда третий диапазон имеет размер, меньший предварительно определенного диапазона.
3. Способ управления движением по п. 1 или 2, в котором второй этап включает в себя этап, на котором выполняют коррекцию, чтобы уменьшать первый диапазон или увеличивать второй диапазон, когда ширина дороги третьей полосы движения составляет предварительно определенное расстояние или более, по сравнению с тем, когда ширина дороги третьей полосы движения меньше предварительно определенного расстояния.
4. Способ управления движением по п. 1 или 2, содержащий этапы, на которых:
- оценивают второй диапазон после предварительно определенного времени; и
- разрешают рассматриваемому транспортному средству сменять полосу движения, когда второй диапазон после предварительно определенного времени полностью включает в себя первый диапазон.
5. Устройство управления движением транспортного средства, содержащее:
первый детектор, выполненный с возможностью обнаруживать помеху рядом с рассматриваемым транспортным средством, движущимся в первой полосе движения;
второй детектор, выполненный с возможностью обнаруживать вторую полосу движения, смежную с первой полосой движения,
третий детектор, выполненный с возможностью обнаруживать третью полосу движения, следующую и смежную со второй полосой движения; и
контроллер, выполненный с возможностью:
- задавать первый диапазон в целевой позиции для смены полосы движения во второй полосе движения, причем первый диапазон имеет размер, равный или больший размера, который рассматриваемое транспортное средство занимает на поверхности дороги;
- обнаруживать диапазон во второй полосе движения в качестве второго диапазона, причем диапазон во второй полосе движения расположен сбоку от рассматриваемого транспортного средства, причем помеха отсутствует в диапазоне во второй полосе движения; и
- разрешать рассматриваемому транспортному средству сменять полосу движения, когда второй диапазон полностью включает в себя первый диапазон,
причем контроллер дополнительно выполнен с возможностью:
- обнаруживать диапазон в третьей полосе движения в качестве третьего диапазона, причем диапазон в третьей полосе движения расположен сбоку от рассматриваемого транспортного средства, причем помеха отсутствует в диапазоне в третьей полосе движения; и
- выполнять коррекцию, чтобы уменьшать первый диапазон или увеличивать второй диапазон, когда третий диапазон имеет размер, равный или больший предварительно определенного диапазона, по сравнению с тем, когда третий диапазон имеет размер, меньший предварительно определенного диапазона.
| JP 2011113511 A, 09.06.2011 | |||
| JP 2015060300 A, 30.03.2015 | |||
| JP 2008143263 A, 26.06.2008. |

