Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления движением.
Данная заявка испрашивает приоритет на основе заявки на патент Японии № 2015-003893, поданной 13 января 2015 года. Содержимое вышеуказанной заявки содержится в данном документе по ссылке в обозначенных странах, в которых признается включение по ссылке.
Уровень техники
[0002] Для движения рассматриваемого транспортного средства, к настоящему времени известны технологии поддержания расстояния между рассматриваемым транспортным средством и движущимся впереди транспортным средством равным постоянному расстоянию. В числе таких технологий, известна технология определения того, может или нет рассматриваемое транспортное средство обгонять движущееся впереди транспортное средство, и автоматического выполнения обгона движущегося впереди транспортного средства, когда выполняется определение в отношении того, что обгон является возможным (например, патентный документ 1: JP2014-76689A).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2014-76689A
Сущность изобретения
Задачи, решаемые изобретением
[0004] В вышеприведенном предшествующем уровне техники, движение рассматриваемого транспортного средства управляется без подтверждения намерения пользователя, и ввиду этого управление движением может выполняться различным способом из намерения пользователя.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять устройство управления движением, которое, при управлении движением рассматриваемого транспортного средства, может выполнять соответствующее управление на основе намерения пользователя.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему посредством предоставления устройства управления движением. Устройство управления движением определяет окружение движения на основе состояния движения рассматриваемого транспортного средства и представляет информацию представления, соответствующую окружению движения, пользователю. Когда пользователь вводит информацию ответа в ответ на информацию представления, устройство управления движением управляет движением рассматриваемого транспортного средства на основе информации ответа, которую вводит пользователь. Когда фактическое окружение движения рассматриваемого транспортного средства подпадает под окружения движения, соответствующие двум или более элементов информации представления, устройство управления движением представляет информацию представления в отношении того, какой уровень приоритета является наибольшим, пользователю.
Преимущества изобретения
[0007] Согласно настоящему изобретению, пользователю может представляться информация представления, которая требуется в большей степени пользователем в соответствии с окружением движения рассматриваемого транспортного средства. Движение рассматриваемого транспортного средства может управляться на основе информации ответа, которую вводит пользователь в ответ на такую информацию представления, и ввиду этого может выполняться соответствующее управление движением на основе определения пользователя.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой устройства управления движением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является видом, иллюстрирующим пример таблицы, используемой для определения окружения движения.
Фиг. 3 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в окружении настигания движущегося впереди транспортного средства.
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 5 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в окружении приближения к пункту взимания платы за проезд.
Фиг. 6 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в окружении приближения к точке слияния.
Фиг. 7 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в окружении с перегораживанием полосы движения рассматриваемого транспортного средства.
Фиг. 8 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в окружении объезда объекта на дороге.
Фиг. 9 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в окружении настигания посредством транспортного средства сзади.
Фиг. 10 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в окружении аварийной эвакуации.
Фиг. 11 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в окружении переноса полосы движения к пункту назначения.
Фиг. 12 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в окружении движения по направлению к SA/PA.
Фиг. 13 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в окружении выполнения смены полосы движения.
Фиг. 14 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в специальном управлении движением согласно второму варианту осуществления.
Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей процесс специального управления движением согласно второму варианту осуществления.
Фиг. 16 является видом, иллюстрирующим пример информации представления, представленной посредством устройства представления в специальном управлении движением согласно третьему варианту осуществления.
Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей процесс специального управления движением согласно третьему варианту осуществления.
Предпочтительный способ осуществления изобретения
[0009] Далее описаны один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, описывается устройство управления движением согласно настоящему изобретению посредством примерной иллюстрации конфигурации, которая предоставляется в транспортном средстве.
[0010] Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 100 управления движением согласно настоящему варианту осуществления. Как проиллюстрировано на фиг. 1, устройство 100 управления движением согласно настоящему варианту осуществления имеет датчик 110, устройство 120 обнаружения позиции рассматриваемого транспортного средства, картографическую базу 130 данных, бортовое оборудование 140, устройство 150 представления, устройство 160 ввода, устройство 180 управления приведением в движение, устройство 190 управления и устройство 170 связи. Эти устройства соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0011] Датчик 110 обнаруживает состояние движения рассматриваемого транспортного средства. Примеры датчика 110 включают в себя камеру переднего вида, которая захватывает изображения впереди рассматриваемого транспортного средства, камеру заднего вида, которая захватывает изображения позади рассматриваемого транспортного средства, передний радар, который обнаруживает помехи впереди рассматриваемого транспортного средства, задний радар, который обнаруживает помехи позади рассматриваемого транспортного средства, боковые радары, которые обнаруживают помехи, присутствующие по бокам от рассматриваемого транспортного средства, датчик скорости транспортного средства, который определяет скорость транспортного средства для рассматриваемого транспортного средства, и бортовую камеру, которая захватывает изображения водителя. Датчик 110 может быть сконфигурирован с одним из вышеописанных различных датчиков либо также может быть сконфигурирован с комбинацией из двух или более датчиков. Результаты обнаружения датчика 110 выводятся в устройство 190 управления.
[0012] Устройство 120 обнаружения позиции рассматриваемого транспортного средства состоит из GPS-модуля, гиродатчика, датчика скорости транспортного средства и других необходимых компонентов. Устройство 120 обнаружения позиции рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые из множества спутников связи с использованием GPS-модуля, чтобы периодически получать позиционную информацию целевого транспортного средства (рассматриваемого транспортного средства), и обнаруживает текущую позицию целевого транспортного средства на основе полученной позиционной информации целевого транспортного средства, информации варьирования угла, полученной из гиродатчика, и скорости транспортного средства, полученной из датчика скорости транспортного средства. Позиционная информация целевого транспортного средства, обнаруженная посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, выводится в устройство 190 управления.
[0013] Картографическая база 130 данных сохраняет картографическую информацию, которая включает в себя позиционную информацию различных инфраструктурных объектов и конкретных точек. В частности, картографическая база 130 данных сохраняет позиционную информацию точек слияния, точек разветвления, пунктов взимания платы за проезд, позиций в который число полос движения уменьшается, зон обслуживания (SA)/зон парковки (PA) и т.д. вместе с картографической информацией. Устройство 190 управления может обращаться к картографической информации, сохраненной в картографической базе данных.
[0014] Бортовое оборудование 140 включает в себя различные устройства, оборудованные в транспортном средстве, и может управляться водителем. Примеры такого бортового оборудования включают в себя рулевой механизм, педаль акселератора, педаль тормоза, навигационное устройство, аудиоустройство, кондиционер, переключатель громкой связи, окно с сервоприводом стекла, стеклоочиститель, фары, проблесковый сигнал и гудок. Когда водитель выполняет операцию бортового оборудования 140, его информация выводится в устройство 190 управления.
[0015] Устройство 150 представления, например, может представлять собой такое устройство, как дисплей навигационного устройства, дисплей, включенный в зеркало заднего вида, дисплей, включенный в приборный блок, дисплей на лобовом стекле, проецируемый на ветровое стекло, и динамик аудиоустройства. Устройство 150 представления представляет информацию представления, которая описывается ниже, водителю под управлением посредством устройства 190 управления. Ниже также описывается способ представления информации представления.
[0016] Устройство 160 ввода, например, может представлять собой такое устройство, как переключатель круговой ручки регулировки, который обеспечивает возможность ввода посредством ручного управления водителем, сенсорную панель, расположенную на экране отображения, и микрофон, который обеспечивает возможность ввода посредством голоса водителя. В настоящем варианте осуществления, водитель может управлять устройством 160 ввода, чтобы за счет этого вводить информацию ответа в ответ на информацию представления, которая представляется посредством устройства 150 представления. Информация ответа, вводимая через устройство 160 ввода, выводится в устройство 190 управления.
[0017] Устройство 170 связи осуществляет связь с оборудованием связи, расположенным за пределами транспортного средства. Например, устройство 170 связи выполняет связь между транспортными средствами с другим транспортным средством, выполняет связь между транспортным средством и дорожной инфраструктурой с оборудованием, предоставленным на обочине дороги, или осуществляет беспроводную связь с информационным сервером, предоставленным за пределами транспортного средства, и ввиду этого может получать различные элементы информации из внешнего оборудования. Информация, полученная посредством устройства связи, выводится в устройство 190 управления.
[0018] Устройство 180 управления приведением в движение управляет движением рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство следует за движущимся впереди транспортным средством, устройство 180 управления приведением в движение управляет работой приводного механизма (которая включает в себя работу двигателя внутреннего сгорания в случае автомобиля с двигателем и работу электромотора в случае электромобиля и дополнительно включает в себя распределение крутящего момента для двигателя внутреннего сгорания и электромотора в случае гибридного автомобиля) и операцией торможения, чтобы достигать ускорения, замедления и скорости транспортного средства таким образом, что расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством может поддерживаться равным постоянному расстоянию. Когда рассматриваемое транспортное средство выполняет смену полосы движения, к примеру, обгон движущегося впереди транспортного средства, устройство 180 управления приведением в движение управляет работой исполнительного устройства рулевого управления для того, чтобы управлять работой колес, и ввиду этого выполняет управление при повороте рассматриваемого транспортного средства. Другие известные способы также могут использоваться в качестве способа управления движением посредством устройства 180 управления приведением в движение.
[0019] Устройство 190 управления состоит из постоянного запоминающего устройства (ROM), которое сохраняет программы для управления движением рассматриваемого транспортного средства, центрального процессора (CPU), который выполняет программы, сохраненные в ROM, и оперативного запоминающего устройства (RAM), которое выступает в качестве доступного устройства хранения данных. Другая функциональная схема, такая как микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC) и программируемая пользователем вентильная матрица (FPGA), также может использоваться в качестве замены или в дополнение к CPU.
[0020] Устройство 190 управления выполняет программы, сохраненные в ROM, с использованием CPU, чтобы за счет этого достигать функции получения информации по движению для того, чтобы получать информацию относительно состояния движения рассматриваемого транспортного средства, функции определения окружения движения для того, чтобы определять окружение движения рассматриваемого транспортного средства, функции определения информации представления для того, чтобы определять информацию представления, которая должна представляться водителю, в соответствии с окружением движения, функции представления для того, чтобы представлять информацию представления водителю, функции получения информации ответа для того, чтобы получать информацию ответа, которую вводит водитель в ответ на информацию представления, и функции управления движением для того, чтобы управлять движением рассматриваемого транспортного средства. Ниже описывается каждая функция устройства 190 управления.
[0021] Чтобы определять окружение движения рассматриваемого транспортного средства, устройство 190 управления использует функцию получения информации по движению для того, чтобы получать информацию по движению относительно состояния движения рассматриваемого транспортного средства. Например, устройство 190 управления может получать информацию внешних изображений вокруг транспортного средства, захваченную посредством камеры переднего вида и камеры заднего вида, и/или результаты обнаружения посредством переднего радара, заднего радара и боковых радаров в качестве информации по движению. Устройство 190 управления также может получать информацию скорости транспортного средства для рассматриваемого транспортного средства, обнаруженную посредством датчика скорости транспортного средства, и/или информацию изображений лица водителя, захваченную посредством бортовой камеры, в качестве информации по движению.
[0022] Устройство 190 управления дополнительно может получать информацию относительно текущей позиции рассматриваемого транспортного средства из устройства 120 обнаружения позиции рассматриваемого транспортного средства в качестве информации по движению и также может получать позиционную информацию точек слияния, точек разветвления, пунктов взимания платы за проезд, позиций, в которых число полос движения уменьшается, зон обслуживания (SA)/зон парковки (PA) и т.д. из картографической базы 130 данных в качестве информации по движению. Помимо этого, устройство 190 управления может получать информацию относительно операции бортового оборудования 140 водителем из бортового оборудования 140 в качестве информации по движению.
[0023] При выполнении функции определения окружения движения, устройство 190 управления обращается к таблице, сохраненной в ROM устройства 190 управления, для того, чтобы определять окружение движения, в котором движется рассматриваемое транспортное средство. Фиг. 2 является видом, иллюстрирующим пример таблицы, используемой для того, чтобы определять окружение движения. Например, таблица, проиллюстрированная на фиг. 2, сохраняет, для каждого окружения движения, название окружения движения, условие определения окружения движения, уровень приоритета информации представления, условие представления информации представления и условие отмены ожидания информации представления. Ниже описываются уровень приоритета информации представления, условие представления информации представления и условие отмены ожидания информации представления.
[0024] Например, в примере, проиллюстрированном на фиг. 2, условие определения "окружения настигания движущегося впереди транспортного средства" задается посредством двух условий: условие "обнаружения движущегося впереди транспортного средства" и условие "скорость транспортного средства для движущегося впереди транспортного средства < скорость транспортного средства для рассматриваемого транспортного средства". В этом случае, устройство 190 управления определяет то, удовлетворяет или нет рассматриваемое транспортное средство вышеуказанным условиям, например, на основе результатов обнаружения посредством камеры переднего вида и/или переднего радара, скорости транспортного средства для рассматриваемого транспортного средства, обнаруженной посредством датчика скорости транспортного средства, позиционной информации рассматриваемого транспортного средства и т.д. Когда вышеуказанные условия удовлетворяются, устройство 190 управления определяет то, что рассматриваемое транспортное средство находится в "окружении настигания движущегося впереди транспортного средства". Аналогично, для всех остальных окружений движения, зарегистрированных в таблице определения окружения, устройство 190 управления определяет то, удовлетворяется или нет каждое условие определения.
[0025] Устройство 190 управления использует функцию определения информации представления для того, чтобы определять информацию представления, которая должна представляться водителю, на основе окружения движения рассматриваемого транспортного средства, определенного посредством функции определения окружения движения. В настоящем варианте осуществления, ROM устройства 190 управления сохраняет информацию представления, соответствующую каждому окружению движения, и устройство 190 управления извлекает из ROM информацию представления, соответствующую окружению движения, определенному посредством функции определения окружения движения.
[0026] Фиг. 3 является видом, иллюстрирующим пример информации представления, которая отображается на экране дисплея в качестве устройства 150 представления в "окружении настигания движущегося впереди транспортного средства". Когда окружение движения рассматриваемого транспортного средства представляет собой "окружение настигания движущегося впереди транспортного средства", устройство 190 управления определяет представлять, как проиллюстрировано на фиг. 3, информацию представления, которая включает в себя такую информацию сообщений, как "Движущееся впереди транспортное средство обнаружено. Какое действие следует выбрать?" вместе с двумя альтернативами "следовать за" и "выполнять обгон".
[0027] В некоторых состояниях движения рассматриваемого транспортного средства, фактическое окружение движения рассматриваемого транспортного средства может подпадать под окружения движения, соответствующие двум или более элементов информации представления. В таких случаях, устройство 190 управления обращаться к соответствующим уровням приоритета элементов информации представления, зарегистрированных в таблице, как проиллюстрировано на фиг. 2, чтобы определять информацию представления в отношении того, какой предыдущий уровень является более высоким, в качестве информации представления, которая должна представляться водителю.
[0028] Например, в примере, проиллюстрированном на фиг. 2, когда окружение движения рассматриваемого транспортного средства соответствует "окружению настигания движущегося впереди транспортного средства", окружение движения рассматриваемого транспортного средства также может соответствовать "окружению движения по направлению к SA/PA", в котором "время для прибытия в зону обслуживания или зону парковки составляет в пределах 60 секунд". В таком случае, устройство 190 управления сравнивает уровень приоритета информации представления в "окружении настигания движущегося впереди транспортного средства" и уровень приоритета информации представления в "окружении движения по направлению к SA/PA", чтобы определять информацию представления с более высоким предыдущим уровнем в качестве информации представления, которая должна представляться водителю. Например, в примере, проиллюстрированном на фиг. 2, уровень "I" приоритета информации представления в "окружении движения по направлению к SA/PA" выше уровня "A" приоритета информации представления в "окружении настигания движущегося впереди транспортного средства". Следовательно, устройство 190 управления определяет информацию представления с более высоким уровнем приоритета в "окружении движения по направлению к SA/PA" в качестве информации представления, которая должна представляться водителю.
[0029] В примере, проиллюстрированном на фиг. 2, окружение движения рассматриваемого транспортного средства может соответствовать "окружению настигания движущегося впереди транспортного средства", а также "окружению приближения к точке слияния". Уровень "C" приоритета информации представления в "окружении приближения к точке слияния" выше уровня "A" приоритета информации представления в "окружении настигания движущегося впереди транспортного средства". Устройство 190 управления ввиду этого может определять информацию представления с более высоким уровнем приоритета в "окружении приближения к точке слияния" в качестве информации представления, которая должна представляться водителю.
[0030] Уровень приоритета информации представления может надлежащим образом задаваться в соответствии со степенью привлечения внимания для водителя в каждом окружении движения. Например, в "окружении аварийной эвакуации", "окружении объезда объекта на дороге" и т.п., значимость привлечения внимания водителя является высокой, и уровень приоритета может задаваться выше, соответственно. С другой стороны, когда считается, что значимость привлечения внимания водителя не является более высокой в "окружении движения по направлению к SA/PA", "окружении приближения к точке слияния" и т.п., чем в других окружениях движения, уровень приоритета может задаваться ниже, соответственно. В альтернативном варианте осуществления, например, уровень приоритета информации представления в "окружении движения по направлению к SA/PA" и/или в "окружении приближения к точке слияния" может задаваться ниже уровня приоритета информации представления в "окружении настигания движущегося впереди транспортного средства".
[0031] Устройство 190 управления использует функцию представления для того, чтобы представлять информацию представления, определенную посредством функции определения информации представления, водителю. В частности, устройство 190 управления передает информацию представления, определенную посредством функции определения информации представления, в устройство 150 представления и ввиду этого обеспечивает ему возможность представлять информацию представления, определенную посредством функции определения информации представления, водителю.
[0032] Устройство 190 управления определяет то, удовлетворяется или нет условие представления, которое задает время представления информации представления, и представляет информацию представления водителю в то время, когда условие представления удовлетворяется. В частности, устройство 190 управления обращается к таблице, проиллюстрированной на фиг. 2, чтобы получать условие представления информации представления, которая должна представляться водителю. Затем устройство 190 управления определяет то, удовлетворяет или нет рассматриваемое транспортное средство условию представления, на основе информации по движению рассматриваемого транспортного средства и представляет информацию представления водителю в то время, когда условие представления удовлетворяется.
[0033] Например, в "окружении настигания движущегося впереди транспортного средства", устройство 190 управления обращается к таблице, проиллюстрированной на фиг. 2, чтобы получать условие представления информации представления, соответствующей "окружению настигания движущегося впереди транспортного средства". В примере, проиллюстрированном на фиг. 2, условие представления, соответствующее информации представления в "окружении настигания движущегося впереди транспортного средства", задается в качестве такого условия, что "время до контакта (TTC) с движущимся впереди транспортным средством составляет S1 или меньше". В этом случае, устройство 190 управления вычисляет TTC с движущимся впереди транспортным средством на основе информации по движению рассматриваемого транспортного средства, такой как скорость транспортного средства для движущегося впереди транспортного средства и скорость транспортного средства для рассматриваемого транспортного средства, и представляет информацию представления водителю во время T1, в которое TTC становится предварительно определенным значением S1 или меньше.
[0034] В настоящем варианте осуществления, устройство 190 управления может изменять условие представления на основе состояния движения рассматриваемого транспортного средства и ввиду этого может изменять время представления информации представления. Ниже описываются подробности способа изменения условия представления.
[0035] До представления информации представления водителю, устройство 190 управления определяет режимы представления альтернатив, включенных в информацию представления, и альтернативу, которая должна первоначально выбираться (альтернативу по умолчанию), на основе состояния движения рассматриваемого транспортного средства. Например, в примере, проиллюстрированном на фиг. 3, устройство 190 управления определяет альтернативу "следовать за" в качестве альтернативы по умолчанию из двух альтернатив "следовать за" и "выполнять обгон" на основе состояния движения рассматриваемого транспортного средства и ввиду этого представляет информацию представления водителю в состоянии, в котором граница рамки, указывающая выбор, наложена на альтернативы "следовать за", как проиллюстрировано на фиг. 3. В примере, проиллюстрированном на фиг. 3, устройство 190 управления представляет информацию представления при отображении альтернативы "выполнять обгон" в состоянии недоступности для выбора (изменении режима отображения альтернативы "выполнять обгон"), так что водитель может легко выбирать альтернативу "следовать за". Ниже описываются подробности способа изменения режима представления альтернативы и способа определения альтернативы по умолчанию.
[0036] Когда водитель вводит информацию ответа через устройство 160 ввода в ответ на информацию представления, представленную водителю, устройство 190 управления использует функцию получения информации ответа для того, чтобы получать информацию ответа, которая вводится водителем из устройства 160 ввода. Например, как проиллюстрировано на фиг. 3, в "окружении настигания движущегося впереди транспортного средства", водителю представляется две альтернативы "следовать за" и "выполнять обгон" в качестве информации представления. Когда, в ответ на это, водитель управляет устройством 160 ввода таким образом, чтобы выбирать альтернативу "выполнять обгон", устройство 190 управления получает информацию ответа "выполнять обгон" из устройства 160 ввода.
[0037] Устройство 190 управления использует функцию управления движением для того, чтобы управлять движением рассматриваемого транспортного средства на основе входной информации, полученной посредством функции получения информации ответа. Например, при получении входной информации "выполнять обгон" в "окружении настигания движущегося впереди транспортного средства", устройство 190 управления передает команду в устройство 180 управления приведением в движение, чтобы выполнять смену полосы движения для обгона движущегося впереди транспортного средства.
[0038] В настоящем варианте осуществления, когда условие отмены ожидания, которое описывается ниже, удовлетворяется после того, как информация представления представляется водителю, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе текущей выбранной альтернативы, даже если водитель не вводит информацию ответа. В частности, устройство 190 управления обращается к таблице, проиллюстрированной на фиг. 2, чтобы определять то, удовлетворяется или нет условие отмены ожидания, соответствующее информации представления, представленной водителю. Когда условие отмены ожидания удовлетворяется, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе текущей выбранной альтернативы.
[0039] Например, в примере, проиллюстрированном на фиг. 3, альтернатива "следовать за" представляется водителю в состоянии первоначального выбора. После представления информации представления водителю, устройство 190 управления обращается к таблице, проиллюстрированной на фиг. 2, чтобы определять то, удовлетворяется или нет такое условие отмены ожидания, что "TTC с движущимся впереди транспортным средством составляет S2 (S2<S1) или меньше". Когда такое условие отмены ожидания, что "TTC с движущимся впереди транспортным средством составляет S2 или меньше", удовлетворяется, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе альтернативы "следовать за", даже если водитель не выбирает альтернативу "следовать за".
[0040] Далее описывается процесс управления движением согласно настоящему варианту осуществления со ссылкой на фиг. 4. Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно настоящему варианту осуществления. Следует понимать, что процесс управления движением, описанный ниже, выполняется посредством устройства 190 управления.
[0041] Во-первых, на этапе S101, устройство 190 управления использует функцию получения информации по движению для того, чтобы получать информацию по движению относительно состояния движения рассматриваемого транспортного средства. На этапе S102, устройство 190 управления использует функцию определения окружения движения для того, чтобы определять окружение движения рассматриваемого транспортного средства на основе информации по движению, полученной на этапе S101.
[0042] На этапе S103, устройство 190 управления использует функцию определения информации представления для того, чтобы извлекать информацию представления, соответствующую окружению движения, определенному на этапе S102. Затем на этапе S104, устройство 190 управления использует функцию определения информации представления для того, чтобы определять то, извлекаются или нет два или более элементов информации представления на этапе S103. Когда два или более элементов информации представления извлекаются, процедура переходит к этапу S105, на котором информация представления, которая должна представляться водителю, определяется на основе уровня приоритета каждого элемента информации представления из двух или более элементов информации представления, извлеченной на этапе S104. Процедура затем переходит к этапу S106. Когда, на этапе S104, два или более элементов информации представления не извлекаются, процедура переходит к этапу S106.
[0043] На этапе S106, устройство 190 управления использует функцию представления для того, чтобы определять режим представления каждой альтернативы информации представления, которая должна представляться водителю. На этапе S107, устройство 190 управления использует функцию представления для того, чтобы определять альтернативу, которая должна первоначально выбираться (альтернативу по умолчанию) из множества альтернатив, включенных в информацию представления.
[0044] На этапе S108, устройство 190 управления использует функцию представления для того, чтобы определять условие представления для представления информации представления. Устройство 190 управления может получать условие представления, зарегистрированное в таблице, в качестве условия представления информации представления, как проиллюстрировано на фиг. 2, а также может изменять полученную информацию представления на основе информации по движению рассматриваемого транспортного средства. Затем на этапе S109, устройство 190 управления использует функцию представления для того, чтобы определять то, удовлетворяется или нет условие представления, определенное на этапе S108. Когда условие представления не удовлетворяется, процедура ожидает на этапе S109 до тех пор, пока не будет удовлетворено условие представления. Когда условие представления удовлетворяется, процедура переходит к этапу S110.
[0045] На этапе S110, устройство 190 управления использует функцию представления для того, чтобы представлять информацию представления. В частности, устройство 190 управления управляет устройством 150 представления таким образом, чтобы представлять информацию представления, извлеченную на этапе S103 (когда имеются два или более элементов извлеченной информации представления, при этом информация представления определена на этапе S105), в режиме представления каждой альтернативы, определенной на этапе S106, в состоянии, в котором альтернатива, определенная на этапе S107, первоначально выбирается. Информация представления ввиду этого представляется водителю.
[0046] На этапе S111, устройство 190 управления использует функцию управления движением для того, чтобы определять то, выбирает или нет водитель какую-либо из альтернатив с использованием устройства 160 ввода в ответ на информацию представления, представленную на этапе S110. Когда водитель выбирает альтернативу, процедура переходит к этапу S113, тогда как, когда водитель не выбирает альтернативу, процедура переходит к этапу S112. Примеры случая, в котором водитель выбирает альтернативу, включают в себя случай, в котором водитель использует устройство 160 ввода, чтобы вводить информацию ответа с выбором альтернативы, отличной от альтернативы по умолчанию, и случай, в котором водитель вводит информацию ответа с подтверждением альтернативы по умолчанию.
[0047] Когда, на этапе S111, выполняется определение в отношении того, что водитель не выбирает альтернативу, процедура переходит к этапу S112. На этапе S112, устройство 190 управления использует функцию управления движением для того, чтобы определять то, удовлетворяется или нет условие отмены ожидания. Когда условие отмены ожидания не удовлетворяется, процедура возвращается к этапу S111 и повторяет процессы этапа S111 и S112 до тех пор, пока водитель не выберет альтернативу, или не будет удовлетворено условие отмены ожидания. Когда условие отмены ожидания удовлетворяется, процедура переходит к этапу S113. На этапе S113, устройство 190 управления использует функцию управления движением для того, чтобы выполнять управление движением рассматриваемого транспортного средства на основе выбранной альтернативы информации представления.
[0048] Далее подробно описывается работа устройства управления 190 в каждом окружении. Во-первых, описывается работа устройства управления 190 в "окружении настигания движущегося впереди транспортного средства".
[0049] Например, устройство 190 управления получает информацию по движению рассматриваемого транспортного средства (этап S101), определяет окружение движения рассматриваемого транспортного средства на основе полученной информации по движению (этап S102), следовательно, определяет "окружение настигания движущегося впереди транспортного средства" (этап S102) при удовлетворении двум условиям: условие "обнаружения движущегося впереди транспортного средства" и условие "скорость транспортного средства для движущегося впереди транспортного средства < скорость транспортного средства для рассматриваемого транспортного средства", и получает информацию представления, соответствующую "окружению настигания движущегося впереди транспортного средства", из ROM (этап S103).
[0050] Затем устройство 190 управления определяет режим представления каждой альтернативы, включенной в информацию представления, на основе информации по движению рассматриваемого транспортного средства (этап S106). Например, в примере, проиллюстрированном на фиг. 3, информация представления, соответствующая "окружению настигания движущегося впереди транспортного средства", имеет такие альтернативы, как "следовать за" и "выполнять обгон", которые рассматриваемое транспортное средство может выполнять в "окружении настигания движущегося впереди транспортного средства". В этом случае, устройство 190 управления может определять режим представления каждой альтернативы следующим образом на основе информации по движению, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0051] Например, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе нагрузки при вождении водителя из состояний вождения водителя. Когда нагрузка при вождении водителя поднимается выше предварительно определенного опорного диапазона или опускается ниже предварительно определенного опорного диапазона, например, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "следовать за" по сравнению с тем, когда нагрузка при вождении водителя попадает в предварительно определенный опорный диапазон.
[0052] Устройство 190 управления может определять то, что нагрузка при вождении водителя является высокой, например, когда водитель выполняет операцию бортового оборудования 140, такого как кондиционер и автоаудио, и/или когда водитель выполняет громкую связь. Помимо этого или альтернативно, устройство 190 управления может определять то, что нагрузка при вождении водителя является низкой, например, по мере того, как увеличивается время движения при самостоятельном вождении рассматриваемого транспортного средства.
[0053] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе предыстории движения водителя из состояний движения рассматриваемого транспортного средства. Например, устройство 190 управления определяет тенденцию водителя в вождении на основе предыстории движения водителя, и когда водитель имеет тенденцию не выполнять обгон, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "следовать за", по сравнению с тем, когда водитель имеет тенденцию выполнять обгон.
[0054] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе маршрута в пункт назначения из состояний движения рассматриваемого транспортного средства. Например, когда направление, в котором рассматриваемое транспортное средство сменяет полосу движения после выбора альтернативы "выполнять обгон", представляет собой направление отклонения от маршрута в пункт назначения, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу "выполнять обгон". Когда рассматриваемое транспортное средство должно поворачивать налево в следующей точке разветвления, чтобы двигаться по направлению к пункту назначения, но несмотря на это, должно сменять полосу движения на правостороннюю полосу движения для обгона, например, направление, в котором рассматриваемое транспортное средство сменяет полосу движения, представляет собой направление отклонения от маршрута в пункт назначения. Устройство 190 управления ввиду этого может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу "выполнять обгон".
[0055] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе скорости транспортного средства для рассматриваемого транспортного средства из состояний движения рассматриваемого транспортного средства. Например, когда скорость транспортного средства для рассматриваемого транспортного средства ниже скорости периферийных транспортных средств, периферийные транспортные средства движутся рядом с рассматриваемым транспортным средством на высокой скорости, и имеется очень высокая вероятность того, что рассматриваемое транспортное средство не может находить пространство, необходимое для смены полосы движения. Устройство 190 управления ввиду этого может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "следовать за".
[0056] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе заданной скорости транспортного средства для рассматриваемого транспортного средства из состояний движения рассматриваемого транспортного средства. Например, при условии, что скорость движения рассматриваемого транспортного средства, которое автоматически следует за движущимся впереди транспортным средством, может выбираться из числа трех заданных скоростей "низкой скорости", "средней скорости" и "высокой скорости", когда заданная скорость ниже скорости транспортного средства для движущегося впереди транспортного средства, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "следовать за". Это обусловлено тем, что когда заданная скорость ниже скорости транспортного средства для движущегося впереди транспортного средства, оценивается то, что обгон требует длительного времени.
[0057] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе степени затора дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда степень затора дороги составляет предварительно определенное значение или выше, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "следовать за" по сравнению с тем, когда степень затора дороги ниже предварительно определенного значения. Это обусловлено тем, что на дороге с высокой степенью затора, другие транспортные средства движутся рядом с рассматриваемым транспортным средством, и имеется очень высокая вероятность того, что рассматриваемое транспортное средство не может находить пространство, необходимое для смены полосы движения.
[0058] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе числа полос движения дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда число полос движения дороги, по которой движется рассматриваемое транспортное средство, меньше предварительно определенного числа, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "следовать за" по сравнению с тем, когда число полос движения дороги, по которой движется рассматриваемое транспортное средство, не меньше предварительно определенного числа. Это обусловлено тем, что если число транспортных средств в трафике является идентичным, другие транспортные средства, движущиеся на дороге, имеющей большое число полос движения, распределяются по полосам движения, и предполагается, что пространство для смены полосы движения может быть легко обнаружено, но на дороге, имеющей небольшое число полос движения, другие транспортные средства движутся в очереди, и считается, что пространство для смены полосы движения может быть трудно находить, и, соответственно, возможности обгона движущихся впереди транспортных средств уменьшаются.
[0059] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе типа дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда дорога, по которой движется рассматриваемое транспортное средство, представляет собой региональную магистральную дорогу, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "следовать за" по сравнению с тем, когда дорога представляет собой шоссе. Это обусловлено тем, что масштаб магистральной дороги, в общем, меньше масштаба шоссе, и ввиду этого считается, что возможности обгона уменьшаются.
[0060] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе формы дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда форма дороги, по которой движется рассматриваемое транспортное средство, представляет собой кривую, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "следовать за" по сравнению с тем, когда форма дороги представляет собой прямую линию.
[0061] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе правил дорожного движения и/или дорожного знака из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу "выполнять обгон" в зоне запрещенного обгона. Когда полоса движения рассматриваемого транспортного средства представляет собой крайнюю правую или крайнюю левую полосу движения дороги, рассматриваемое транспортное средство не может двигаться за пределами полосы движения. Устройство 190 управления ввиду этого может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу "выполнять обгон".
[0062] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе погоды из окружающих обстановок рядом с рассматриваемым транспортным средством. Например, когда идет дождь, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "следовать за". Это обусловлено тем, что дождь вызывает плохую видимость, и ввиду этого предполагается, что водитель может ощущать себя в большей безопасности при езде за движущимся впереди транспортным средством.
[0063] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "следовать за" и "выполнять обгон", на основе времени из окружающих обстановок рядом с рассматриваемым транспортным средством. Например, устройство 190 управления может изменять режим представления каждой альтернативы ночью таким образом, что водитель может легко выбирать альтернативу "следовать за". Это обусловлено тем, что видимость является плохой ночью, и водитель ввиду этого может ощущать себя в большей безопасности при езде за движущимся впереди транспортным средством.
[0064] Таким образом, устройство 190 управления может определять режим представления каждой альтернативы, такой как "следовать за" и "выполнять обгон", которую рассматриваемое транспортное средство может выполнять в "окружении настигания движущегося впереди транспортного средства", на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0065] Способ изменения режима представления альтернативы не ограничен конкретным образом. Например, устройство 190 управления может изменять режим представления альтернативы таким образом, что водитель может легко выбирать альтернативу, к примеру, посредством мигания альтернативы, изменения альтернативы на более заметный цвет и/или оттенок, увеличения размера отображения альтернативы и размещения альтернативы в позиции, в которой она может легко выбираться водителем. Устройство 190 управления также может изменять режим представления альтернативы таким образом, что водитель не может легко выбирать альтернативу, к примеру, посредством отображения альтернативы в состоянии недоступности для выбора, как проиллюстрировано на фиг. 3. Помимо этого или альтернативно, устройство 190 управления может облегчать выбор одной из множества альтернатив, чтобы за счет этого переводить другие альтернативы в состояние относительной сложности выбора. С другой стороны, устройство 190 управления может затруднять выбор одной из множества альтернатив, чтобы за счет этого переводить другие альтернативы в состояние относительной простоты выбора. Для другой информации представления, режим представления каждой альтернативы может изменяться аналогичным образом, так что водитель может легко выбирать альтернативу (или не может легко выбирать альтернативу).
[0066] Далее приводится описание способа определения альтернативы, которая должна первоначально выбираться (альтернативы по умолчанию), из множества альтернатив, таких как "следовать за" и "выполнять обгон", которую рассматриваемое транспортное средство может выполнять в "окружении настигания движущегося впереди транспортного средства". Устройство 190 управления определяет альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S107).
[0067] В частности, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе нагрузки при вождении водителя из состояний вождения водителя. Например, когда нагрузка при вождении водителя поднимается выше предварительно определенного опорного диапазона или опускается ниже предварительно определенного опорного диапазона, устройство 190 управления может определять альтернативу "следовать за" в качестве альтернативы по умолчанию. Это обусловлено тем, что когда нагрузка при вождении водителя поднимается выше предварительно определенного опорного диапазона или опускается ниже предварительно определенного опорного диапазона, альтернатива "следовать за" может выбираться, чтобы за счет этого обеспечивать возможность водителю ощущать себя в большей безопасности.
[0068] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе предыстории обгонов водителя из состояний движения рассматриваемого транспортного средства. Например, когда водитель часто выбирает альтернативу "выполнять обгон" при вождении в течение предыдущего одного часа, можно считать, что водитель спешит. В таком случае, устройство 190 управления может определять альтернативу "выполнять обгон" в качестве альтернативы по умолчанию.
[0069] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе маршрута в пункт назначения из состояний движения рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство должно поворачивать направо в следующей точке разветвления, чтобы двигаться по направлению к пункту назначения, рассматриваемое транспортное средство может сменять полосу движения на правостороннюю полосу движения для того, чтобы обгонять движущееся впереди транспортное средство, и после этого поворачивать направо из этой полосы движения в точке разветвления, чтобы двигаться по направлению к пункту назначения. В таком случае, устройство 190 управления может определять альтернативу "выполнять обгон" в качестве альтернативы по умолчанию.
[0070] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе скорости транспортного средства для рассматриваемого транспортного средства из состояний движения рассматриваемого транспортного средства. Например, когда скорость транспортного средства для рассматриваемого транспортного средства составляет предварительно определенную скорость или выше, устройство 190 управления может определять альтернативу "выполнять обгон" в качестве альтернативы по умолчанию. Когда скорость транспортного средства для рассматриваемого транспортного средства является высокой, рассматриваемое транспортное средство рано или поздно настигает движущееся впереди транспортное средство. Следовательно, при приближении к движущемуся впереди транспортному средству рассматриваемое транспортное средство должно тормозить, чтобы замедляться. Таким образом, альтернатива "выполнять обгон" может задаваться в качестве альтернативы по умолчанию, чтобы за счет этого указывать водителю заблаговременно сменять полосу движения.
[0071] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе степени затора дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда степень затора дороги, по которой движется рассматриваемое транспортное средство, составляет предварительно определенное значение или ниже, устройство 190 управления может определять альтернативу "выполнять обгон" в качестве альтернативы по умолчанию. Это обусловлено тем, что смена полосы движения является простой на дороге, которая не сильно переполнена.
[0072] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе полосы движения, в которой движется рассматриваемое транспортное средство, из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, когда полоса движения рассматриваемого транспортного средства представляет собой полосу обгона, обгон уже планируется. Устройство 190 управления ввиду этого может определять альтернативу "выполнять обгон" в качестве альтернативы по умолчанию.
[0073] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе типа проезжей дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда тип проезжей дороги рассматриваемого транспортного средства представляет собой относительно крупномасштабную дорогу (к примеру, магистральную дорогу и шоссе), устройство 190 управления может определять альтернативу "выполнять обгон" в качестве альтернативы по умолчанию. Это обусловлено тем, что смена полосы движения является относительно простой на относительно крупномасштабной дороге.
[0074] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе формы дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда форма дороги, по которой движется рассматриваемое транспортное средство, представляет собой кривую, можно ожидать, что водитель использует преимущество внешней краевой части кривой для того, чтобы выполнять обгон. Соответственно, при условии, что информация представления имеет альтернативу "сменить полосу движения вправо для выполнения обгона", когда кривая имеет внешнюю краевую часть справа, например, устройство 190 управления может определять альтернативу "сменить полосу движения вправо для выполнения обгона" в качестве альтернативы по умолчанию.
[0075] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе числа полос движения дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда число полос движения дороги, по которой движется рассматриваемое транспортное средство, составляет предварительно определенное число или больше, другие транспортные средства, движущиеся на дороге, могут распределяться по полосам движения, и ввиду этого считается, что смена полосы движения является более простой, чем тогда, когда число полос движения меньше предварительно определенного числа, при условии, что трафик транспортных средств является идентичным. Устройство 190 управления ввиду этого может определять альтернативу "выполнять обгон" в качестве альтернативы по умолчанию.
[0076] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе погоды из окружающих обстановок рядом с рассматриваемым транспортным средством. Например, когда идет дождь, водитель может не предпочитать смену полосы движения, поскольку видимость является более плохой, чем видимость при хорошей погоде. Следовательно, когда идет дождь, устройство 190 управления может определять альтернативу "следовать за" в качестве альтернативы по умолчанию.
[0077] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "следовать за" и "выполнять обгон", на основе времени из окружающих обстановок рядом с рассматриваемым транспортным средством. Например, видимость ночью является более плохой, чем видимость днем, так что водитель может не предпочитать смену полосы движения ночью. Следовательно, ночью устройство 190 управления может определять альтернативу "следовать за" в качестве альтернативы по умолчанию.
[0078] Таким образом, в "окружении настигания движущегося впереди транспортного средства", устройство 190 управления может определять альтернативу по умолчанию, которая должна первоначально выбираться из множества альтернатив, таких как "следовать за" и "выполнять обгон", которую рассматриваемое транспортное средство может выполнять, на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0079] Далее приводится описание способа определения условия представления в "окружении настигания движущегося впереди транспортного средства". Устройство 190 управления обращается к таблице, проиллюстрированной на фиг. 2, чтобы получать условие представления информации представления в "окружении настигания движущегося впереди транспортного средства". Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления получает такое условие, что "TTC с движущимся впереди транспортным средством составляет S1 или меньше", в качестве условия представления информации представления в "окружении настигания движущегося впереди транспортного средства". Дополнительно, устройство 190 управления изменяет полученное условие представления на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S108).
[0080] Например, устройство 190 управления может изменять условие представления в соответствии с нагрузкой при вождении водителя из состояний вождения водителя. Когда нагрузка при вождении водителя поднимается выше предварительно определенного опорного диапазона, например, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше по сравнению с тем, когда нагрузка при вождении водителя попадает в предварительно определенный опорный диапазон. В этом случае, например, устройство 190 управления может изменять такое условие представления, что "TTC с движущимся впереди транспортным средством составляет S1 или меньше", на такое условие представления, что "TTC с движущимся впереди транспортным средством составляет S1' (S1<S1') или меньше". Когда нагрузка при вождении водителя поднимается выше предварительно определенного опорного диапазона, может быть предусмотрено множество объектов, на которые следует обратить внимание, и длительный период времени может требоваться для определения обгона. По этой причине, информация представления представляется заблаговременно, чтобы за счет этого обеспечивать возможность водителю оставаться на безопасной стороне и ощущать себя в большей безопасности. Также, когда нагрузка при вождении водителя опускается ниже предварительно определенного опорного диапазона, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше по сравнению с тем, когда нагрузка при вождении водителя попадает в предварительно определенный опорный диапазон. Когда нагрузка при вождении водителя опускается ниже предварительно определенного опорного диапазона, водитель может концентрироваться на одной вещи и требовать длительного периода времени, чтобы замечать информацию представления, так что информация представления представляется заблаговременно, чтобы за счет этого обеспечивать возможность водителю ощущать себя в большей безопасности.
[0081] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе предыстории движения водителя из состояний движения рассматриваемого транспортного средства. Например, когда число обгонов движущихся впереди транспортных средств посредством рассматриваемого транспортного средства превышает предварительно определенное опорное значение в течение предварительно определенного периода времени до текущего времени, считается, что водитель спешит. Условие представления ввиду этого может изменяться таким образом, что информация представления представляется раньше.
[0082] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе расстояния до пункта назначения из состояний движения рассматриваемого транспортного средства. Например, когда расстояние до пункта назначения составляет предварительно определенное расстояние или больше, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше. Это обусловлено тем, что когда расстояние до пункта назначения составляет предварительно определенное расстояние или больше, условие представления может представляться заблаговременно, чтобы за счет этого уменьшать нагрузку при вождении вследствие такого большого расстояния до пункта назначения.
[0083] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе скорости транспортного средства для рассматриваемого транспортного средства из состояний движения рассматриваемого транспортного средства. Например, когда скорость транспортного средства для рассматриваемого транспортного средства выше скорости транспортного средства для периферийных транспортных средств, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше. Когда скорость транспортного средства для рассматриваемого транспортного средства является высокой, считается, что водитель спешит, и число пространств для смены полосы движения увеличивается. Следовательно, в таком случае, информация представления может представляться раньше, чтобы за счет этого отвечать на намерение водителя поспешить для выполнения обгона.
[0084] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе относительной скорости по отношению к движущемуся впереди транспортному средству из состояний движения рассматриваемого транспортного средства. Например, когда относительная скорость по отношению к движущемуся впереди транспортному средству составляет предварительно определенную скорость или выше, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше. Когда относительная скорость рассматриваемого транспортного средства по отношению к движущемуся впереди транспортному средству является высокой, информация представления представляется раньше, и рассматриваемое транспортное средство ввиду этого может сменять полосу движения раньше, соответственно. Как результат, водитель может ощущать себя в большей безопасности по отношению к движущемуся впереди транспортному средству.
[0085] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе степени затора дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда степень затора составляет предварительно определенное значение или выше, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше. Это обеспечивает возможность водителю оставаться на безопасной стороне и ощущать себя в большей безопасности, даже когда дорога переполнена.
[0086] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе полосы движения, в которой движется рассматриваемое транспортное средство, из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, когда имеется дорога, включающая в себя обычную полосу движения и полосу обгона, и рассматриваемое транспортное средство движется в обычной полосе движения, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше по сравнению с тем, когда рассматриваемое транспортное средство движется в полосе обгона. Это обусловлено тем, что в обычной полосе движения, имеется очень высокая вероятность того, что движущееся впереди транспортное средство движется с более низкой скоростью, чем скорость в полосе обгона, и информация представления может представляться заблаговременно, чтобы за счет этого отвечать на намерение водителя поспешить.
[0087] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе типа дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, на относительно крупномасштабной дороге (к примеру, магистральной дороге и шоссе), устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше, чем на относительно мелкомасштабной дороге (к примеру, второстепенной улице и общей дороге). Здесь, при условии, что трафик транспортных средств является идентичным, другие транспортные средства могут распределяться при движении по относительно крупномасштабной дороге, по сравнению с движением по относительно мелкомасштабной дороге, и ввиду этого оказывается, что степень свободы смены полосы движения является высокой. Следовательно, когда рассматриваемое транспортное средство движется по относительно крупномасштабной дороге, информация представления может представляться раньше, чтобы за счет этого обеспечивать возможность пользователю выполнять обгон при пребывании на безопасной стороне. Аналогично, когда число полос движения дороги, по которой движется рассматриваемое транспортное средство, составляет предварительно определенное число или более, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше.
[0088] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе формы дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда форма дороги, по которой движется рассматриваемое транспортное средство, представляет собой кривую, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше по сравнению с тем, когда форма дороги представляет собой прямую линию. Это обусловлено тем, что когда форма дороги, по которой движется рассматриваемое транспортное средство, представляет собой кривую, имеется очень высокая вероятность того, что водитель больше концентрируется на вождении по сравнению с тем, когда форма дороги представляет собой прямую линию, и выбор альтернативы может требовать большего времени, соответственно.
[0089] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе ширины полосы движения рассматриваемого транспортного средства из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, когда ширина полосы движения рассматриваемого транспортного средства составляет предварительно определенное расстояние или больше, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше по сравнению с тем, когда ширина полосы движения рассматриваемого транспортного средства меньше предварительно определенного расстояния. Это обусловлено тем, что смена полосы движения может требовать большего времени, когда ширина полосы движения рассматриваемого транспортного средства составляет предварительно определенное расстояние или более, по сравнению с тем, когда ширина полосы движения рассматриваемого транспортного средства меньше предварительно определенного расстояния, при условии что поперечная скорость является идентичной.
[0090] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе погоды из окружающих обстановок рядом с рассматриваемым транспортным средством. Например, устройство 190 управления может изменять условие представления в случае дождя таким образом, что информация представления представляется раньше, чем при хорошей погоде. Когда идет дождь, водитель может предпринимать более осторожное вождение, чем при хорошей погоде. Устройство 190 управления ввиду этого может представлять информацию представления заблаговременно, чтобы за счет этого обеспечивать возможность водителю ощущать себя в большей безопасности.
[0091] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе текущего времени из окружающих обстановок рядом с рассматриваемым транспортным средством. Например, ночью, устройство 190 управления может представлять информацию представления раньше. В темной окружающей обстановке ночью, устройство 190 управления может представлять информацию представления раньше, чтобы за счет этого обеспечивать возможность водителю оставаться на безопасной стороне и ощущать себя в большей безопасности.
[0092] Таким образом, в "окружении настигания движущегося впереди транспортного средства", устройство 190 управления может определять информацию представления на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0093] После того, как условие представления определяется, устройство 190 управления определяет то, удовлетворяется или нет определенное условие представления (этап S108). Когда условие представления удовлетворяется, устройство 190 управления представляет информацию представления водителю в вышеописанном режиме представления альтернативы в состоянии, в котором вышеописанная альтернатива по умолчанию выбирается (этап S109). После этого, когда водитель вводит информацию ответа в ответ на информацию представления (этап S111="Да"), устройство 190 управления управляет движением рассматриваемого транспортного средства на основе альтернативы, выбранной водителем (этап S113).
[0094] Когда водитель не вводит информацию ответа, устройство 190 управления определяет то, удовлетворяется или нет условие отмены ожидания (этап S112). Например, в примере, проиллюстрированном на фиг. 2, условие отмены ожидания в "окружении настигания движущегося впереди транспортного средства" представляет собой такое условие, что "TTC с движущимся впереди транспортным средством составляет S2 (S1 > S2) или меньше". В этом случае, устройство 190 управления определяет то, удовлетворяет или нет рассматриваемое транспортное средство такому условию отмены ожидания, что "TTC с движущимся впереди транспортным средством составляет S2 (S1 > S2) или меньше". Когда такое условие, что "TTC с движущимся впереди транспортным средством составляет S2 (S1 > S2) или меньше", удовлетворяется, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе альтернативы по умолчанию (этап S113).
[0095] Устройство 190 управления работает таким способом в "окружении настигания движущегося впереди транспортного средства".
[0096] Далее описывается работа устройства управления 190 в "окружении приближения к пункту взимания платы за проезд". Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления определяет то, удовлетворяет или нет рассматриваемое транспортное средство такому условию определения, что "время для прибытия в пункт взимания платы за проезд, расположенный впереди, в пределах 60 секунд", на основе информации по движению рассматриваемого транспортного средства. Когда условие определения удовлетворяется, устройство 190 управления определяет то, что окружение движения представляет собой "окружение приближения к пункту взимания платы за проезд" (этап S102), и устройство 190 управления получает информацию представления, соответствующую "окружению приближения к пункту взимания платы за проезд", из ROM (этап S103). Фиг. 5 является видом, иллюстрирующим пример информации представления, которая отображается на экране дисплея в качестве устройства 150 представления в "окружении приближения к пункту взимания платы за проезд".
[0097] Затем устройство 190 управления определяет режим представления каждой альтернативы, включенной в информацию представления, на основе информации по движению рассматриваемого транспортного средства (этап S106). Например, в примере, проиллюстрированном на фиг. 5, информация представления, соответствующая "окружению приближения к пункту взимания платы за проезд", имеет такую информацию сообщений, как "По направлению к какой будке пункта взимания платы за проезд осуществляется движение?" вместе с такими альтернативами, как "1", "2", "3" и "4", соответствующими надлежащим будкам пункта взимания платы за проезд, в которые может въезжать рассматриваемое транспортное средство в "окружении приближения к пункту взимания платы за проезд". В этом случае, устройство 190 управления может определять режим представления каждой альтернативы следующим образом на основе информации по движению, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0098] Например, устройство 190 управления может определять режим представления альтернативы, соответствующей каждой будке, на основе нагрузки при вождении водителя из состояний вождения водителя. Когда нагрузка при вождении водителя поднимается выше предварительно определенного опорного диапазона или опускается ниже предварительно определенного опорного диапазона, например, устройство 190 управления может изменять режим представления альтернативы, соответствующей каждой будке, таким образом, что водитель может легко выбирать альтернативу, соответствующую будке близко к полосе движения рассматриваемого транспортного средства (например, будке, расстояние которой от полосы движения рассматриваемого транспортного средства не превышает предварительно определенное расстояние), по сравнению с тем, когда нагрузка при вождении водителя попадает в предварительно определенный опорный диапазон. Это обусловлено тем, что когда нагрузка при вождении водителя поднимается выше предварительно определенного опорного диапазона или опускается ниже предварительно определенного опорного диапазона, водитель может легко выбирать альтернативу, которую выбирает водитель с высокой вероятностью, чтобы за счет этого обеспечивать возможность водителю оставаться на безопасной стороне и ощущать себя в большей безопасности, соответственно.
[0099] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, соответствующей каждой будке, на основе предыстории движения водителя из состояний движения рассматриваемого транспортного средства. Например, устройство 190 управления может указывать будку, которую водитель использует нечасто (к примеру, будки, расположенные с обоих концов пункта взимания платы за проезд), на основе предыстории движения водителя, чтобы за счет этого изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу, соответствующую будке, которую с меньшей вероятностью использует водитель.
[0100] Помимо этого или альтернативно, устройство 190 управления может определять режим представления альтернативы, соответствующей каждой будке, на основе направления к пункту назначения из состояний движения рассматриваемого транспортного средства. Например, устройство 190 управления может изменять режим представления альтернативы, соответствующей каждой будке, таким образом, что водитель не может легко выбирать альтернативу, соответствующую будке, из будок пункта взимания платы за проезд, которая расположена в позиции, отдельной от маршрута в пункт назначения. Когда рассматриваемое транспортное средство, движущееся по направлению к пункту назначения, планирует двигаться на дороге, которая разветвляется вправо после прохождения через пункт взимания платы за проезд, например, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу, соответствующую будке, из будок пункта взимания платы за проезд, которая располагается слева от середины.
[0101] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, соответствующей каждой будке, в соответствии со скоростью транспортного средства для рассматриваемого транспортного средства из состояний движения рассматриваемого транспортного средства. Например, когда скорость транспортного средства для рассматриваемого транспортного средства ниже скорости транспортного средства для периферийных транспортных средств, рассматриваемое транспортное средство может прибывать к будке пункта взимания платы за проезд позднее, чем периферийные транспортные средства, и нагрузка при вождении водителя ввиду этого может быть высокой, поскольку ситуация вокруг будок изменяется в зависимости от текущего момента времени посредством периферийных транспортных средств, которые въезжают в будки раньше рассматриваемого транспортного средства. Следовательно, в таком случае, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу, соответствующую будке, которая находится близко к маршруту для рассматриваемого транспортного средства. Это обеспечивает возможность водителю концентрироваться на вождении.
[0102] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, соответствующей каждой будке, на основе степени затора вокруг будок из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу, соответствующую будке, степень затора которой ниже предварительно определенного значения. Это обусловлено тем, что использование такой будки с низкой степенью затора обеспечивает возможность водителю оставаться на безопасной стороне и ощущать себя в большей безопасности.
[0103] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, соответствующей каждой будке, на основе числа будок в пункте взимания платы за проезд из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, когда число будок составляет предварительно определенное число или более, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать будку, отдельную от середины. Это обеспечивает возможность водителю легко выбирать будку, даже когда число будок пункта взимания платы за проезд является большим.
[0104] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, соответствующей каждой будке, на основе типа дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда масштаб дороги, по которой движется рассматриваемое транспортное средство, является относительно большим, число будок также является большим. Устройство 190 управления ввиду этого может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу, соответствующую будке, которая отступает от маршрута для рассматриваемого транспортного средства. Это может сокращать альтернативы до альтернатив, которые водитель может легко выбирать, чтобы за счет этого уменьшать неопределенность водителя в отношении того, какую альтернативу должен выбирать водитель. Число альтернатив, которые должны выбираться водителем, ограничено, с тем чтобы уменьшать неопределенность водителя, даже когда число будок пункта взимания платы за проезд является большим. Водитель ввиду этого может ощущать себя в большей безопасности.
[0105] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, соответствующей каждой будке, на основе формы дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда форма дороги, по которой движется рассматриваемое транспортное средство, представляет собой кривую, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу, соответствующую будке, которая отступает от маршрута для рассматриваемого транспортного средства, по сравнению с тем, когда форма дороги представляет собой прямую линию. Это обусловлено тем, что когда форма дороги представляет собой кривую, имеется очень высокая вероятность того, что водитель больше концентрируется на вождении по сравнению с тем, когда форма дороги представляет собой прямую линию, и выбор альтернативы может требовать большего времени, соответственно.
[0106] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, соответствующей каждой будке, на основе погоды из окружающих обстановок рядом с рассматриваемым транспортным средством. Например, когда идет дождь, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу, соответствующую будке, которая находится близко к маршруту для рассматриваемого транспортного средства. Это обусловлено тем, что дождь вызывает плохую видимость, и водитель ввиду этого может ощущать себя в безопасности, когда некоторые будки, в которые может относительно легко въезжать рассматриваемое транспортное средство, упрощаются для выбора водителем.
[0107] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, соответствующей каждой будке, на основе времени из окружающих обстановок рядом с рассматриваемым транспортным средством. Например, устройство 190 управления может изменять режим представления каждой альтернативы ночью таким образом, что водитель может легко выбирать альтернативу, соответствующую будке, которая находится близко к маршруту для рассматриваемого транспортного средства. Это обусловлено тем, что видимость является плохой ночью, и водитель ввиду этого может ощущать себя в безопасности, когда некоторые будки, в которые может относительно легко въезжать рассматриваемое транспортное средство, упрощаются для выбора водителем.
[0108] Таким образом, устройство 190 управления может определять режим представления альтернативы, соответствующей каждой будке пункта взимания платы за проезд, в которую может въезжать рассматриваемое транспортное средство в "окружении приближения к пункту взимания платы за проезд" на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0109] Далее приводится описание способа определения альтернативы, которая должна первоначально выбираться (альтернативы по умолчанию), из числа альтернатив, соответствующих надлежащим будкам пункта взимания платы за проезд, в которые может въезжать рассматриваемое транспортное средство в "окружении приближения к пункту взимания платы за проезд". Устройство 190 управления определяет альтернативу по умолчанию из числа альтернатив, соответствующих надлежащим будкам, на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S107).
[0110] В частности, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, соответствующих надлежащим будкам, на основе нагрузки при вождении водителя из состояний вождения водителя. Например, когда нагрузка при вождении водителя поднимается выше предварительно определенного опорного диапазона или опускается ниже предварительно определенного опорного диапазона, устройство 190 управления может определять альтернативу, соответствующую будке, которая является ближайшей к маршруту для рассматриваемого транспортного средства, в качестве альтернативы по умолчанию.
[0111] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, соответствующих надлежащим будкам, на основе предыстории использования будок из состояний движения рассматриваемого транспортного средства. Например, устройство 190 управления получает частоту использования каждой будки на основе предыстории использования будок, и устройство 190 управления может определять альтернативу, соответствующую будке, которую водитель наиболее часто использует, в качестве альтернативы по умолчанию. Когда водитель использует пункт взимания платы за проезд по пути на работу, например, будка, которую наиболее часто использует водитель, может выбираться в качестве альтернативы по умолчанию, чтобы за счет этого повышать удобство для водителя.
[0112] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, соответствующих надлежащим будкам, на основе маршрута в пункт назначения из состояний движения рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство, движущееся по направлению к пункту назначения, должно двигаться по маршруту, который разветвляется вправо после прохождения через пункт взимания платы за проезд, например, устройство 190 управления может определять альтернативу, соответствующую будке, которая располагается справа от середины, в качестве альтернативы по умолчанию. Это обеспечивает возможность водителю легко двигаться по направлению к пункту назначения после прохождения через пункт взимания платы за проезд и ощущать себя в большей безопасности.
[0113] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, соответствующих надлежащим будкам, на основе скорости транспортного средства для рассматриваемого транспортного средства из состояний движения рассматриваемого транспортного средства. Например, когда скорость транспортного средства для рассматриваемого транспортного средства составляет предварительно определенную скорость или выше, устройство 190 управления может определять альтернативу, соответствующую будке, которая является ближайшей к маршруту для рассматриваемого транспортного средства, в качестве альтернативы по умолчанию. Причина этого заключается в следующем. При условии, что скорость транспортного средства для рассматриваемого транспортного средства является высокой, при движении по направлению к будке, отдельной от маршрута для рассматриваемого транспортного средства, рассматриваемое транспортное средство, возможно, должно выполнять некоторую операцию, такую как замедление, тогда как при подъезде к будке близко к маршруту для рассматриваемого транспортного средства, операция может быть относительно простой, и водитель ввиду этого может ощущать себя в безопасности.
[0114] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, соответствующих надлежащим будкам, на основе степени затора вокруг будок из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, устройство 190 управления может определять альтернативу, соответствующую будке, степень затора которой составляет предварительно определенное значение или ниже, в качестве альтернативы по умолчанию. В одном или более вариантов осуществления, устройство 190 управления может определять степень затора вокруг будок посредством использования камеры переднего вида, чтобы захватывать изображения электронного указателя, которая указывает ситуацию и/или степень затора вокруг будок, и выполнения обработки изображений. В одном или более вариантов осуществления, устройство 190 управления может определять степень затора вокруг будок на основе информации, которую устройство 170 связи принимает через связь между транспортным средством и дорожной инфраструктурой и которая представляет степень затора вокруг будок. В одном или более вариантов осуществления, устройство 190 управления может определять степень затора вокруг будок посредством измерения скорости других транспортных средств, ожидающих в пункте взимания платы за проезд, через связь между транспортными средствами и определения того, имеются или нет другие транспортные средства с низкой скоростью в очереди.
[0115] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, соответствующих надлежащим будкам, на основе полосы движения, в которой движется рассматриваемое транспортное средство, из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, устройство 190 управления может определять альтернативу, соответствующую будке, которая является ближайшей к полосе движения рассматриваемого транспортного средства, в качестве альтернативы по умолчанию. Рассматриваемое транспортное средство может прибывать раньше всего к будке, которая является ближайшей к полосе движения рассматриваемого транспортного средства, и водитель ввиду этого может ощущать себя в большей безопасности, даже когда водитель не осуществляет вождение хорошо.
[0116] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, соответствующих надлежащим будкам, на основе типа дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда тип дороги, по которой движется рассматриваемое транспортное средство, представляет собой относительно крупномасштабную дорогу (к примеру, магистральную дорогу и шоссе), устройство 190 управления может определять альтернативу, соответствующую будке, расположенной около середины будок, в качестве альтернативы по умолчанию. Это обусловлено тем, что пункт взимания платы за проезд относительно крупномасштабной дороги имеет определенное число будок, и водитель может легко выбирать будку, когда будка расположена в середине будок.
[0117] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, соответствующих надлежащим будкам, на основе формы дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда форма дороги, по которой движется рассматриваемое транспортное средство, представляет собой кривую, устройство 190 управления может определять альтернативу, соответствующую будке, расположенной на внешней стороне кривой, в качестве альтернативы по умолчанию таким образом, что водитель может использовать преимущество внешней краевой части кривой для того, чтобы прибывать к будке. Это может уменьшать варьирование центробежной силы, прикладываемой к водителю, и водитель ввиду этого может ощущать повышенное качество езды.
[0118] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, соответствующих надлежащим будкам, на основе числа полос движения дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда число полос движения дороги, по которой движется рассматриваемое транспортное средство, составляет предварительно определенное число или более, устройство 190 управления может определять альтернативу, соответствующую будке, расположенной около середины будок, в качестве альтернативы по умолчанию.
[0119] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, соответствующих надлежащим будкам, на основе погоды из окружающих обстановок рядом с рассматриваемым транспортным средством. Например, когда идет дождь, устройство 190 управления может определять альтернативу, соответствующую будке, которая является ближайшей к маршруту для рассматриваемого транспортного средства, в качестве альтернативы по умолчанию. Поскольку дождь вызывает более плохую видимость, чем видимость при хорошей погоде, будка, к которой рассматриваемое транспортное средство может приближаться практически по прямой линии для въезда, может задаваться в качестве значения по умолчанию, чтобы за счет этого обеспечивать возможность водителю ощущать себя в большей безопасности. Аналогично, ночью, устройство 190 управления может определять альтернативу, соответствующую будке, которая является ближайшей к маршруту для рассматриваемого транспортного средства, в качестве альтернативы по умолчанию.
[0120] Таким образом, в "окружении приближения к пункту взимания платы за проезд", устройство 190 управления может определять альтернативу по умолчанию, которая должна первоначально выбираться из множества альтернатив, соответствующих надлежащим будкам, в которые может въезжать рассматриваемое транспортное средство, на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0121] Далее приводится описание способа определения условия представления в "окружении приближения к пункту взимания платы за проезд". Устройство 190 управления обращается к таблице, проиллюстрированной на фиг. 2, чтобы получать условие представления информации представления в "окружении приближения к пункту взимания платы за проезд". Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления получает такое условие, что "время для прибытия в пункт взимания платы за проезд составляет S3 или меньше", в качестве условия представления информации представления в "окружении приближения к пункту взимания платы за проезд". Дополнительно, устройство 190 управления изменяет полученное условие представления на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S108).
[0122] В частности, в "окружении приближения к пункту взимания платы за проезд", устройство 190 управления может изменять условие представления на основе нагрузки при вождении водителя, расстояния до пункта назначения, полосы движения, в которой движется рассматриваемое транспортное средство, формы дороги, по которой движется рассматриваемое транспортное средство, погоды и времени, аналогично "окружению настигания движущегося впереди транспортного средства". Помимо этого или альтернативно, в "окружении приближения к пункту взимания платы за проезд", устройство 190 управления может изменять условие представления следующим образом.
[0123] Таким образом, устройство 190 управления может определять условие представления на основе предыстории движения водителя из состояний движения рассматриваемого транспортного средства. Например, когда водитель не имеет большого опыта за плечами в отношении использования пункта взимания платы за проезд, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше. Это обеспечивает возможность водителю оставаться на безопасной стороне и ощущать себя в большей безопасности.
[0124] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе скорости транспортного средства для рассматриваемого транспортного средства из состояний движения рассматриваемого транспортного средства. Например, когда скорость транспортного средства для рассматриваемого транспортного средства выше скорости транспортного средства для периферийных транспортных средств, рассматриваемое транспортное средство может прибывать к будке до периферийных транспортных средств, и ввиду этого вероятность того, что рассматриваемое транспортное средство может выбирать множество будок, является высокой. Такой случай увеличивает нагрузку водителя для того, чтобы выбирать альтернативу, соответствующую одной будке из определенного числа будок. Устройство 190 управления ввиду этого изменяет условие представления таким образом, что информация представления представляется раньше. Это обеспечивает возможность водителю ощущать себя в большей безопасности.
[0125] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе степени затора пункта взимания платы за проезд из состояний дороги, по которой движется рассматриваемое транспортное средство. В частности, когда степень затора пункта взимания платы за проезд составляет предварительно определенное значение или выше, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше. Это обеспечивает возможность водителю продолжать движение к будке при пребывании на безопасной стороне.
[0126] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе типа дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда рассматриваемое транспортное средство движется по относительно крупномасштабной дороге (к примеру, магистральной дороге и шоссе), устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше, чем тогда, когда рассматриваемое транспортное средство движется по относительно мелкомасштабной дороге (к примеру, второстепенной улице и общей дороге). На относительно крупномасштабной дороге, число будок имеет тенденцию быть большим. Устройство 190 управления ввиду этого может представлять информацию представления раньше, чтобы за счет этого обеспечивать возможность водителю выбирать любую из альтернатив при пребывании на безопасной стороне. Аналогично, устройство 190 управления может изменять условие представления на основе числа полос движения дороги, по которой движется рассматриваемое транспортное средство.
[0127] Таким образом, в "окружении приближения к пункту взимания платы за проезд", устройство 190 управления может определять условие представления на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0128] Когда рассматриваемое транспортное средство удовлетворяет условию представления, устройство 190 управления представляет информацию представления водителю в вышеописанном режиме представления альтернативы в состоянии, в котором вышеописанная альтернатива по умолчанию выбирается (этап S109). После этого, когда водитель вводит информацию ответа в ответ на информацию представления (этап S111="Да"), устройство 190 управления управляет движением рассматриваемого транспортного средства на основе альтернативы, которую выбирает водитель (этап S113). С другой стороны, когда водитель не вводит информацию ответа в "окружении приближения к пункту взимания платы за проезд", устройство 190 управления определяет то, удовлетворяет или нет рассматриваемое транспортное средство такому условию отмены ожидания, что "время для прибытия в пункт взимания платы за проезд составляет S4 (S3 > S4) или меньше", например, как проиллюстрировано на фиг. 2. Когда условие отмены ожидания удовлетворяется, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе альтернативы по умолчанию (этап S113).
[0129] Устройство 190 управления работает таким способом в "окружении приближения к пункту взимания платы за проезд".
[0130] Далее описывается работа устройства управления 190 в "окружении приближения к точке слияния". Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления определяет то, удовлетворяет или нет рассматриваемое транспортное средство такому условию определения, что "время для прибытия в точку слияния, расположенную впереди, составляет в пределах 60 секунд", на основе информации по движению рассматриваемого транспортного средства. Когда условие определения удовлетворяется, устройство 190 управления определяет то, что окружение движения представляет собой "окружение приближения к точке слияния" (этап S102), и устройство 190 управления получает информацию представления, соответствующую "окружению приближения к точке слияния" (этап S103). Фиг. 6 является видом, иллюстрирующим пример информации представления, которая отображается на экране дисплея в качестве устройства 150 представления в "окружении приближения к точке слияния".
[0131] Затем устройство 190 управления определяет режим представления каждой альтернативы, включенной в информацию представления, на основе информации по движению рассматриваемого транспортного средства (этап S106). Например, в примере, проиллюстрированном на фиг. 6, информация представления, соответствующая "окружению приближения к точке слияния", включает в себя такую информацию сообщений, как "Какое действие следует выбрать в точке слияния, обнаруженной впереди?" вместе с такими альтернативами, как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", которые водитель может выполнять в "окружении приближения к точке слияния". В этом случае, устройство 190 управления может определять режим представления каждой альтернативы на основе информации по движению, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0132] Например, устройство 190 управления может изменять режим представления альтернативы, такой как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", на основе другого транспортного средства и/или помехи, присутствующей рядом с рассматриваемым транспортным средством, из состояний движения рассматриваемого транспортного средства. Например, когда другое транспортное средство присутствует сбоку от рассматриваемого транспортного средства, и/или когда такая помеха, как стенка и бордюрный камень, присутствует сбоку от рассматриваемого транспортного средства, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу, соответствующую смене полосы движения в направлении, в котором присутствуют другое транспортное средство и/или помеха.
[0133] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", на основе правил дорожного движения и/или дорожного знака из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу "сменить полосу движения вправо" в зоне запрещенного обгона.
[0134] Дополнительно, устройство 190 управления определяет альтернативу по умолчанию из числа альтернатив, таких как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", которые водитель может выполнять в "окружении приближения к точке слияния", на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S107).
[0135] Например, при условии, что дорога, по которой движется рассматриваемое транспортное средство, имеет полосу движения с возможностью слияния, которая сливается с другой дорогой, и полосу движения без возможности слияния, которая является смежной с полосой движения с возможностью слияния и не позволяет непосредственно сливаться с другой дорогой, когда рассматриваемое транспортное средство движется на полосе движения с возможностью слияния, и полоса движения без возможности слияния не переполнена, устройство 190 управления может определять альтернативу для смены полосы движения на полосу движения без возможности слияния в качестве альтернативы по умолчанию. Это обусловлено тем, что такая смена полосы движения с полосы движения с возможностью слияния на полосу движения без возможности слияния снижает вероятность того, что другое транспортное средство, осуществляющее слияние из другой дороги, приближается к рассматриваемому транспортному средству, и водитель может ощущать себя в большей безопасности. Устройство 190 управления в противном случае может выбирать альтернативу "продолжать движение" в качестве альтернативы по умолчанию.
[0136] Затем устройство 190 управления определяет условие представления информации представления в "окружении приближения к точке слияния" (этап S109). Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления получает такое условие, что "время для прибытия в точку слияния составляет S5 или меньше", в качестве условия представления информации представления в "окружении приближения к точке слияния".
[0137] Когда рассматриваемое транспортное средство удовлетворяет условию представления, устройство 190 управления представляет информацию представления водителю в вышеописанном режиме представления альтернативы в состоянии, в котором вышеописанная альтернатива по умолчанию выбирается (этап S109). После этого, когда пользователь вводит информацию ответа, либо когда такое условие отмены ожидания, что "время для прибытия в точку слияния составляет S6 (S5 > S6) или меньше", удовлетворяется, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе выбранной альтернативы (этап S113).
[0138] Устройство 190 управления работает таким способом в "окружении приближения к точке слияния".
[0139] Далее описывается работа устройства управления 190 в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства". Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления определяет то, удовлетворяет или нет рассматриваемое транспортное средство такому условию определения, что "полоса движения рассматриваемого транспортного средства должна исчезать в пределах предварительно определенного расстояния", на основе информации по движению рассматриваемого транспортного средства. Когда условие определения удовлетворяется, устройство 190 управления определяет то, что окружение движения представляет собой "окружение с перегораживанием полосы движения рассматриваемого транспортного средства" (этап S102), и устройство 190 управления получает информацию представления, соответствующую "окружению с перегораживанием полосы движения рассматриваемого транспортного средства" (этап S103). Фиг. 7 является видом, иллюстрирующим пример информации представления, которая отображается на экране дисплея в качестве устройства 150 представления в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства".
[0140] Затем устройство 190 управления определяет режим представления каждой альтернативы, включенной в информацию представления, на основе информации по движению рассматриваемого транспортного средства (этап S106). Например, в примере, проиллюстрированном на фиг. 7, информация представления, соответствующая "окружению с перегораживанием полосы движения рассматриваемого транспортного средства", включает в себя такую информацию сообщений, как "Движение осуществляется по направлению к помехе в своей полосе движения? (Ваша полоса движения затруднена для проезда. Какое действие следует выбрать?)" вместе с такими альтернативами, как "замедляться автоматически" и "сменить полосу движения вправо", которые водитель может выполнять в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства". В этом случае, устройство 190 управления может определять режим представления каждой альтернативы, такой как "замедляться автоматически" и "сменить полосу движения вправо", следующим образом на основе информации по движению, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0141] Например, устройство 190 управления может изменять режим представления альтернативы, такой как "замедляться автоматически" и "сменить полосу движения", на основе нагрузки при вождении водителя из состояний вождения водителя. Когда нагрузка при вождении водителя поднимается выше предварительно определенного опорного диапазона или опускается ниже предварительно определенного опорного диапазона, например, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "замедляться автоматически" по сравнению с тем, когда нагрузка при вождении водителя попадает в предварительно определенный опорный диапазон. Таким образом, альтернативы, которые может легко выбирать водитель, сужаются до альтернативы, которую водитель может выбирать с высокой вероятностью, чтобы за счет этого обеспечивать возможность водителю оставаться на безопасной стороне и ощущать себя в большей безопасности.
[0142] Помимо этого или альтернативно, устройство 190 управления может определять режим представления альтернативы, такой как "замедляться автоматически" и "сменить полосу движения", на основе предыстории движения водителя из состояний движения рассматриваемого транспортного средства. Например, устройство 190 управления указывает то, представляет собой дорога, по которой движется рассматриваемое транспортное средство, или нет дорогу, используемую водителем по пути на работу, на основе предыстории движения водителя, и может изменять режим представления каждой альтернативы таким образом, что когда ремонт дороги продолжается в течение определенного периода времени на дороге, используемой водителем по пути на работу, водитель не может легко выбирать альтернативу, с которой рассматриваемое транспортное средство должно двигаться в полосе движения, затрудненной для проезда вследствие ремонта дороги.
[0143] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "замедляться автоматически" и "сменить полосу движения", на основе маршрута к пункту назначения из состояний движения рассматриваемого транспортного средства. Например, при условии, что рассматриваемое транспортное средство должно в скором времени поворачивать направо, чтобы двигаться по маршруту к пункту назначения, когда правая полоса движения, смежная с полосой движения рассматриваемого транспортного средства, не затруднена для проезда, рассматриваемое транспортное средство должно сменять полосу движения вправо. Устройство 190 управления ввиду этого может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "сменить полосу движения вправо".
[0144] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "замедляться автоматически" и "сменить полосу движения", на основе скорости транспортного средства для рассматриваемого транспортного средства из состояний движения рассматриваемого транспортного средства. Например, когда скорость транспортного средства для рассматриваемого транспортного средства составляет предварительно определенную скорость или выше, рассматриваемое транспортное средство должно прибывать заблаговременно в затрудненную для проезда точку. Устройство 190 управления ввиду этого может определять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "замедляться автоматически". Это может уменьшать нагрузку водителя при выборе альтернативы.
[0145] Помимо этого или альтернативно, устройство 190 управления может определять режим представления альтернативы, такой как "замедляться автоматически" и "сменить полосу движения", на основе расстояния до затрудненной для проезда точки из состояний движения рассматриваемого транспортного средства. Например, когда расстояние до затрудненной для проезда точки составляет предварительно определенное расстояние или меньше, рассматриваемое транспортное средство должно прибывать заблаговременно в затрудненную для проезда точку. Устройство 190 управления ввиду этого может определять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "замедляться автоматически".
[0146] Помимо этого или альтернативно, когда расстояние до затрудненной для проезда точки является небольшим (например, 100 м), устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может выбирать только альтернативу "сменить полосу движения вправо". Помимо этого или альтернативно, когда расстояние до затрудненной для проезда точки является большим (например, 1 км), устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может выбирать альтернативу "замедляться автоматически" и альтернативу "сменить полосу движения вправо". Например, если водитель может выбирать только альтернативу смены полосы движения, даже если расстояние до затрудненной для проезда точки является большим, смена полосы движения может приводить к тому, что рассматриваемое транспортное средство размещается между грузовиками. В таком случае, водитель может выбирать альтернативу "замедляться автоматически", чтобы за счет этого надлежащим образом не допускать такой опасной ситуации.
[0147] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "замедляться автоматически" и "сменить полосу движения", на основе степени затора дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, на дороге, степень затора которой ниже предварительно определенного значения, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "сменить полосу движения вправо". Это обусловлено тем, что смена полосы движения является относительно простой на дороге, степень затора которой является низкой.
[0148] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "замедляться автоматически" и "сменить полосу движения", на основе числа полос движения дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда число полос движения составляет предварительно определенное число или более, смена полосы движения является относительно простой. Устройство 190 управления ввиду этого может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "сменить полосу движения вправо".
[0149] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "замедляться автоматически" и "сменить полосу движения", на основе формы дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда форма дороги, по которой движется рассматриваемое транспортное средство, представляет собой кривую, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "замедляться автоматически" по сравнению с тем, когда форма дороги представляет собой прямую линию. На кривой, имеется очень высокая вероятность того, что водитель больше концентрируется на вождении, чем на прямой линии. Следовательно, когда альтернативу "замедляться автоматически" легко выбирать, нагрузка водителя для того, чтобы выбирать альтернативу, может уменьшаться, и водитель может осуществлять вождение при ощущении себя в большей безопасности.
[0150] Помимо этого или альтернативно, устройство 190 управления может определять режим представления каждой альтернативы, такой как "замедляться автоматически" и "сменить полосу движения", на основе погоды и/или времени из окружающих обстановок рядом с рассматриваемым транспортным средством. Например, поскольку дождь вызывает более плохую видимость, чем видимость при хорошей погоде, может быть предпочтительным уменьшать нагрузку водителя при выборе альтернативы и обеспечивать возможность водителю концентрироваться на вождении. В этом контексте, при условии, что идет дождь, когда вероятность смены полосы движения вправо в скором времени является высокой, например, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "сменить полосу движения вправо". Аналогично, ночью, когда вероятность смены полосы движения вправо в скором времени является высокой, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "сменить полосу движения вправо".
[0151] Таким образом, устройство 190 управления может определять режим представления альтернативы, такой как "замедляться автоматически" и "сменить полосу движения вправо", которую рассматриваемое транспортное средство может выбирать в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства", на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0152] Далее приводится описание способа определения альтернативы, которая должна первоначально выбираться (альтернативы по умолчанию), из числа альтернатив, таких как "замедляться автоматически" и "сменить полосу движения вправо", которую рассматриваемое транспортное средство может выполнять в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства". Устройство 190 управления определяет альтернативу по умолчанию из числа альтернатив, таких как "замедляться автоматически" и "сменить полосу движения вправо", на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S107).
[0153] В частности, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "замедляться автоматически" и "сменить полосу движения вправо", на основе нагрузки при вождении водителя из состояний вождения водителя. Например, когда нагрузка при вождении водителя поднимается выше предварительно определенного опорного диапазона или опускается ниже предварительно определенного опорного диапазона, устройство 190 управления может определять альтернативу "сменить полосу движения вправо" в качестве альтернативы по умолчанию.
[0154] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "замедляться автоматически" и "сменить полосу движения вправо", на основе предыстории движения водителя из состояний движения рассматриваемого транспортного средства. Например, устройство 190 управления указывает дорогу, которую водитель использует по пути на работу, на основе предыстории движения водителя. Когда ремонт дороги продолжается в течение определенного периода времени на дороге, которую водитель использует по пути на работу, устройство 190 управления может определять альтернативу "сменить полосу движения вправо", чтобы объезжать полосу движения, затрудненную для проезда вследствие ремонта дороги, в качестве альтернативы по умолчанию. Таким образом, альтернатива для объезда затрудненной для проезда точки задается в качестве альтернативы по умолчанию, и водитель ввиду этого может осуществлять вождение при ощущении себя в безопасности.
[0155] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "замедляться автоматически" и "сменить полосу движения вправо", на основе маршрута к пункту назначения из состояний движения рассматриваемого транспортного средства. Например, при условии, что рассматриваемое транспортное средство должно в скором времени поворачивать направо, чтобы двигаться по маршруту к пункту назначения, когда правая полоса движения, смежная с полосой движения рассматриваемого транспортного средства, не затруднена для проезда, рассматриваемое транспортное средство должно сменять полосу движения вправо. Устройство 190 управления ввиду этого может определять альтернативу "сменить полосу движения вправо" в качестве альтернативы по умолчанию.
[0156] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "замедляться автоматически" и "сменить полосу движения вправо", на основе скорости транспортного средства для рассматриваемого транспортного средства из состояний движения рассматриваемого транспортного средства. Например, когда скорость транспортного средства для рассматриваемого транспортного средства составляет предварительно определенную скорость или выше, рассматриваемое транспортное средство должно прибывать заблаговременно в затрудненную для проезда точку. Устройство 190 управления ввиду этого может определять альтернативу "сменить полосу движения вправо" в качестве альтернативы по умолчанию. Это обеспечивает возможность водителю ощущать себя в большей безопасности.
[0157] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "замедляться автоматически" и "сменить полосу движения вправо", на основе степени затора дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда степень затора дороги, по которой движется рассматриваемое транспортное средство, составляет предварительно определенное значение или ниже, устройство 190 управления может определять альтернативу "сменить полосу движения вправо" в качестве альтернативы по умолчанию. Смена полосы движения является относительно простой на дороге, степень затора которой является низкой, и смена полосы движения может выполняться заранее, чтобы за счет этого обеспечивать возможность водителю осуществлять вождение при ощущении себя в безопасности.
[0158] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "замедляться автоматически" и "сменить полосу движения вправо", на основе числа полос движения дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда число полос движения дороги, по которой движется рассматриваемое транспортное средство, составляет предварительно определенное число или более, смена полосы движения является относительно простой. Устройство 190 управления ввиду этого может определять альтернативу "сменить полосу движения вправо" в качестве альтернативы по умолчанию.
[0159] Помимо этого или альтернативно, устройство 190 управления может определять альтернативу по умолчанию из числа альтернатив, таких как "замедляться автоматически" и "сменить полосу движения вправо", на основе погоды и/или времени из окружающих обстановок рядом с рассматриваемым транспортным средством. Например, поскольку дождь вызывает более плохую видимость, чем видимость при хорошей погоде, водитель зачастую хочет заблаговременного завершения смены полосы движения. Следовательно, когда идет дождь, устройство 190 управления может определять альтернативу "сменить полосу движения вправо" в качестве альтернативы по умолчанию. Аналогично, также ночью, устройство 190 управления может определять альтернативу "сменить полосу движения вправо" в качестве альтернативы по умолчанию.
[0160] Таким образом, в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства", устройство 190 управления может определять альтернативу по умолчанию, которая должна первоначально выбираться из множества альтернатив, таких как "замедляться автоматически" и "сменить полосу движения вправо", которую может выполнять рассматриваемое транспортное средство, на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0161] Далее приводится описание способа определения условия представления в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства". Устройство 190 управления обращается к таблице, проиллюстрированной на фиг. 2, чтобы получать условие представления информации представления в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства". Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления получает такое условие, что "время для прибытия в затрудненную для проезда точку составляет S7 или меньше", в качестве условия представления информации представления в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства". Дополнительно, устройство 190 управления изменяет полученное условие представления на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S108).
[0162] Например, в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства", устройство 190 управления может определять условие представления на основе нагрузки при вождении водителя, степени затора дороги, по которой движется рассматриваемое транспортное средство, формы дороги, по которой движется рассматриваемое транспортное средство, погоды и времени, аналогично "окружению настигания движущегося впереди транспортного средства". Помимо этого или альтернативно, в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства", устройство 190 управления может определять условие представления следующим образом.
[0163] Таким образом, устройство 190 управления может определять условие представления на основе направления к пункту назначения из состояний движения рассматриваемого транспортного средства. Например, когда полоса движения рассматриваемого транспортного средства затруднена для проезда впереди, и рассматриваемое транспортное средство может двигаться по направлению к пункту назначения посредством движения на смежной полосе движения, заблаговременная смена полосы движения обеспечивает удобные варианты действий для предстоящей ситуации, и пользователь может ощущать себя в большей безопасности. Следовательно, в таком случае, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше.
[0164] Помимо этого или альтернативно, устройство 190 управления может определять условие представления на основе скорости транспортного средства для рассматриваемого транспортного средства из состояний движения рассматриваемого транспортного средства. Например, когда скорость транспортного средства для рассматриваемого транспортного средства ниже скорости транспортного средства для периферийных транспортных средств, трудно находить пространство для смены полосы движения. Устройство 190 управления ввиду этого изменяет условие представления таким образом, что информация представления представляется раньше. Это обеспечивает возможность водителю ощущать себя в большей безопасности.
[0165] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе полосы движения, в которой движется рассматриваемое транспортное средство, из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, когда имеется дорога, включающая в себя обычную полосу движения и полосу обгона, и рассматриваемое транспортное средство движется в обычной полосе движения, устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше по сравнению с тем, когда рассматриваемое транспортное средство движется в полосе обгона. Это обусловлено тем, что когда обычная полоса движения затруднена для проезда, рассматриваемое транспортное средство должно сменять полосу движения на полосу обгона, но когда другое транспортное средство движется в полосе обгона, для рассматриваемого транспортного средства может быть затруднительным в скором времени сменять полосу движения, и заблаговременная смена полосы движения ввиду этого является предпочтительной.
[0166] Помимо этого или альтернативно, устройство 190 управления может изменять условие представления на основе типа дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда рассматриваемое транспортное средство движется по относительно мелкомасштабной дороге (к примеру, второстепенной улице и общей дороге), устройство 190 управления может изменять условие представления таким образом, что информация представления представляется раньше, чем тогда, когда рассматриваемое транспортное средство движется по относительно крупномасштабной дороге (к примеру, магистральной дороге и шоссе). Это обусловлено тем, что относительно мелкомасштабная дорога имеет небольшое число полос движения, и если полоса движения рассматриваемого транспортного средства затруднена для проезда, то число полос движения, на которые может сменять полосу движения рассматриваемое транспортное средство, является небольшим. Аналогично, устройство 190 управления может определять условие представления на основе числа полос движения дороги, по которой движется рассматриваемое транспортное средство.
[0167] Таким образом, в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства", устройство 190 управления может определять условие представления на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0168] В то время, когда рассматриваемое транспортное средство удовлетворяет условию представления, устройство 190 управления представляет информацию представления водителю в вышеописанном режиме представления альтернативы в состоянии, в котором вышеописанная альтернатива по умолчанию выбирается (этап S109). После этого, когда водитель вводит информацию ответа в ответ на информацию представления (этап S111="Да"), устройство 190 управления управляет движением рассматриваемого транспортного средства на основе альтернативы, которую выбирает водитель (этап S113). С другой стороны, когда водитель не вводит информацию ответа в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства", устройство 190 управления определяет то, удовлетворяет или нет рассматриваемое транспортное средство такому условию отмены ожидания, что "время для прибытия в затрудненную для проезда точку составляет S8 (S7 > S8) или меньше", например, как проиллюстрировано на фиг. 2. Когда условие отмены ожидания удовлетворяется, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе альтернативы по умолчанию (этап S113).
[0169] Устройство 190 управления работает таким способом в "окружении с перегораживанием полосы движения рассматриваемого транспортного средства".
[0170] Далее описывается работа устройства управления 190 в "окружении объезда объекта на дороге". Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления определяет то, удовлетворяется или нет такое условие определения, что "пешеход, велосипед, мотоцикл или упавший объект на дороге присутствует впереди", на основе информации по движению рассматриваемого транспортного средства. Когда условие определения удовлетворяется, устройство 190 управления определяет то, что окружение движения представляет собой "окружение объезда объекта на дороге" (этап S102), и устройство 190 управления получает информацию представления, соответствующую "окружению объезда объекта на дороге" (этап S103). Фиг. 8 является видом, иллюстрирующим пример информации представления, которая отображается на экране дисплея в качестве устройства 150 представления в "окружении объезда объекта на дороге".
[0171] Затем устройство 190 управления определяет режим представления каждой альтернативы, включенной в информацию представления, на основе информации по движению рассматриваемого транспортного средства (этап S106). Например, в примере, проиллюстрированном на фиг. 8, информация представления, соответствующая "окружению объезда объекта на дороге", имеет такую информацию сообщений, как "Помеха обнаруживается впереди", вместе с такими альтернативами, как "объехать ее слева", "замедляться автоматически" и "объехать ее справа", которые водитель может выполнять в "окружении объезда объекта на дороге". В этом случае, устройство 190 управления может определять режим представления каждой альтернативы на основе информации по движению, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0172] Например, устройство 190 управления может определять режим представления альтернативы, такой как "объехать ее слева", "замедляться автоматически" и "объехать ее справа", на основе другого транспортного средства и/или помехи, присутствующей рядом с рассматриваемым транспортным средством, из состояний движения рассматриваемого транспортного средства. Когда другое транспортное средство присутствует сбоку от рассматриваемого транспортного средства, и/или когда такая помеха, как стенка и бордюрный камень, присутствует сбоку от рассматриваемого транспортного средства, устройство 190 управления может определять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу, соответствующую смене полосы движения в направлении, в котором присутствуют другое транспортное средство и/или помеха.
[0173] Дополнительно, устройство 190 управления определяет альтернативу по умолчанию из числа альтернатив, таких как "объехать ее слева", "замедляться автоматически" и "объехать ее справа", которые водитель может выполнять в "окружении объезда объекта на дороге", на основе информации по движению, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S107).
[0174] В частности, устройство 190 управления может определять альтернативу по умолчанию на основе степени затора смежной полосы движения по отношению к полосе движения рассматриваемого транспортного средства из состояний дороги, по которой движется рассматриваемое транспортное средство. Более конкретно, когда левосторонняя смежная полоса движения не сильно переполнена, например, устройство 190 управления может определять альтернативу "объехать ее слева" в качестве альтернативы по умолчанию. Когда другие транспортные средства и/или помехи присутствуют справа и слева от рассматриваемого транспортного средства, например, устройство 190 управления может определять альтернативу "замедляться автоматически" в качестве альтернативы по умолчанию.
[0175] Затем устройство 190 управления определяет условие представления информации представления в "окружении объезда объекта на дороге" (этап S109). Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления получает такое условие, что "объект на дороге обнаруживается", в качестве условия представления информации представления в "окружении объезда объекта на дороге".
[0176] В то время, когда рассматриваемое транспортное средство удовлетворяет условию представления, т.е. в то время, когда рассматриваемое транспортное средство обнаруживает пешехода, велосипед, мотоцикл или упавший объект на дороге, устройство 190 управления представляет информацию представления водителю в вышеописанном режиме представления альтернативы в состоянии, в котором вышеописанная альтернатива по умолчанию выбирается (этап S109). После этого, когда водитель вводит информацию ответа, либо когда такое условие отмены ожидания, что "TTC с объектом на дороге составляет S9 или меньше", удовлетворяется, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе выбранной альтернативы (этап S113).
[0177] Устройство 190 управления работает таким способом в "окружении объезда объекта на дороге".
[0178] Далее описывается работа устройства управления 190 в "окружении настигания посредством транспортного средства сзади". Например, как проиллюстрировано на фиг. 2, устройство 190 управления определяет то, удовлетворяется или нет такое условие определения, что "движущееся сзади транспортное средство присутствует в полосе движения рассматриваемого транспортного средства" и "скорость транспортного средства для движущегося сзади транспортного средства > скорость транспортного средства для рассматриваемого транспортного средства", на основе информации по движению рассматриваемого транспортного средства. Когда условие определения удовлетворяется, устройство 190 управления определяет то, что окружение движения представляет собой "окружение настигания посредством транспортного средства сзади" (этап S102), и устройство 190 управления получает информацию представления, соответствующую "окружению настигания посредством транспортного средства сзади" (этап S103). Фиг. 9 является видом, иллюстрирующим пример информации представления, которая отображается на экране дисплея в качестве устройства 150 представления в "окружении настигания посредством транспортного средства сзади".
[0179] Затем устройство 190 управления определяет режим представления каждой альтернативы, включенной в информацию представления, на основе информации по движению рассматриваемого транспортного средства (этап S106). Например, в примере, проиллюстрированном на фиг. 9, информация представления, соответствующая "окружению настигания посредством транспортного средства сзади", имеет такую информацию сообщений, как "быстро движущееся транспортное средство приближается к Вашему транспортному средству сзади. Какое действие следует выбрать?" вместе с такими альтернативами, как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", которые водитель может выполнять в "окружении настигания посредством транспортного средства сзади". В этом случае, устройство 190 управления определяет режим представления каждой альтернативы на основе информации по движению, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0180] Например, устройство 190 управления может определять режим представления альтернативы, такой как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", на основе другого транспортного средства и/или помехи, присутствующей рядом с рассматриваемым транспортным средством, из состояний движения рассматриваемого транспортного средства. Когда другое транспортное средство присутствует сбоку от рассматриваемого транспортного средства, и/или когда такая помеха, как стенка и бордюрный камень, присутствует сбоку от рассматриваемого транспортного средства, устройство 190 управления может определять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу, соответствующую смене полосы движения в направлении, в котором присутствуют другое транспортное средство и/или помеха.
[0181] Дополнительно, устройство 190 управления определяет альтернативу по умолчанию из числа альтернатив, таких как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", которые водитель может выполнять в "окружении настигания посредством транспортного средства сзади", на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S107).
[0182] В частности, когда выполняется определение в отношении того, что движущееся сзади транспортное средство, приближающееся к рассматриваемому транспортному средству сзади, представляет собой транспортное средство аварийной службы, такое как машина скорой помощи, и смежная полоса движения слева или справа не сильно переполнена, устройство 190 управления может определять альтернативу "сменить полосу движения влево" или "сменить полосу движения вправо" в качестве альтернативы по умолчанию. Устройство 190 управления в противном случае может определять альтернативу "продолжать движение" в качестве альтернативы по умолчанию.
[0183] Затем устройство 190 управления определяет условие представления информации представления в "окружении настигания посредством транспортного средства сзади" (этап S109). Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления получает такое условие, что "TTC с движущимся сзади транспортным средством составляет S10 или меньше", в качестве условия представления информации представления в "окружении настигания посредством транспортного средства сзади".
[0184] Когда рассматриваемое транспортное средство удовлетворяет условию представления, устройство 190 управления представляет информацию представления водителю в вышеописанном режиме представления альтернативы в состоянии, в котором вышеописанная альтернатива по умолчанию выбирается (этап S109). После этого, когда водитель вводит информацию ответа, либо когда такое условие отмены ожидания, что "TTC с движущимся сзади транспортным средством составляет S11 (S10 > S11) или меньше", удовлетворяется, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе выбранной альтернативы (этап S113).
[0185] Устройство 190 управления работает таким способом в "окружении настигания посредством транспортного средства сзади".
[0186] Далее описывается работа устройства управления 190 в "окружении аварийной эвакуации". Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления определяет, на основе информации по движению рассматриваемого транспортного средства, то, удовлетворяется или нет такое условие определения, что "бортовое оборудование 140 не работает в пределах предварительно определенного периода времени" и "определяется, что водитель не способен к вождению, на основе изображений, захваченных посредством бортовой камеры". Когда условие определения удовлетворяется, устройство 190 управления определяет то, что окружение движения представляет собой "окружение аварийной эвакуации" (этап S102), и устройство 190 управления получает информацию представления, соответствующую "окружению аварийной эвакуации" (этап S103). Фиг. 10 является видом, иллюстрирующим пример информации представления, которая отображается на экране дисплея в качестве устройства 150 представления в "окружении аварийной эвакуации".
[0187] Затем устройство 190 управления определяет режим представления каждой альтернативы, включенной в информацию представления, на основе информации по движению рассматриваемого транспортного средства (этап S106). Например, в примере, проиллюстрированном на фиг. 10, информация представления, соответствующая "окружению аварийной эвакуации", включает в себя такую информацию сообщений, как "Вождение не может быть продолжено. Какое действие следует выбрать?" вместе с такими альтернативами, как "сменить полосу движения влево и остановиться на обочине дороги", "продолжать движение" и "сменить полосу движения вправо", которые водитель может выполнять в "окружении аварийной эвакуации". В этом случае, устройство 190 управления может определять режим представления каждой альтернативы на основе информации по движению, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0188] В частности, устройство 190 управления может изменять режим представления альтернативы, такой как "сменить полосу движения влево и остановиться на обочине дороги", "продолжать движение" и "сменить полосу движения вправо", на основе другого транспортного средства и/или помехи, присутствующей рядом с рассматриваемым транспортным средством, из состояний движения рассматриваемого транспортного средства. Когда другое транспортное средство присутствует сбоку от рассматриваемого транспортного средства, и/или когда такая помеха, как стенка и бордюрный камень, присутствует сбоку от рассматриваемого транспортного средства, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу, соответствующую смене полосы движения в направлении, в котором присутствуют другое транспортное средство и/или помеха.
[0189] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "сменить полосу движения влево и остановиться на обочине дороги", "продолжать движение" и "сменить полосу движения вправо", на основе ширины обочины дороги для дороги, по которой движется рассматриваемое транспортное средство, из состояний дороги. Например, когда ширина обочины дороги для дороги, по которой движется рассматриваемое транспортное средство, является достаточной шириной, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "сменить полосу движения влево и остановиться на обочине дороги".
[0190] Дополнительно, устройство 190 управления определяет альтернативу по умолчанию из числа альтернатив, таких как "сменить полосу движения влево и остановиться на обочине дороги", "продолжать движение" и "сменить полосу движения вправо", которые водитель может выполнять в "окружении аварийной эвакуации", на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S107).
[0191] Например, устройство 190 управления может определять альтернативу по умолчанию на основе степени затора полосы движения в контакте с обочиной дороги из состояний дороги, по которой движется рассматриваемое транспортное средство. В частности, когда левосторонняя полоса движения в контакте с обочиной дороги не сильно переполнена, устройство 190 управления может определять альтернативу "сменить полосу движения влево и остановиться на обочине дороги" в качестве альтернативы по умолчанию. Устройство 190 управления в противном случае может определять альтернативу "продолжать движение" в качестве альтернативы по умолчанию.
[0192] Затем устройство 190 управления определяет условие представления информации представления в "окружении аварийной эвакуации" (этап S109). Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления получает условие определения "окружения аварийной эвакуации", в качестве условия представления информации представления в "окружении аварийной эвакуации".
[0193] Когда рассматриваемое транспортное средство удовлетворяет условию представления, т.е. в то время, когда "окружение аварийной эвакуации" определяется, устройство 190 управления представляет информацию представления водителю в вышеописанном режиме представления альтернативы в состоянии, в котором вышеописанная альтернатива по умолчанию выбирается (этап S109). После этого, когда водитель вводит информацию ответа, либо когда такое условие отмены ожидания, что "предварительно определенное время прошло после представления сообщения", удовлетворяется, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе выбранной альтернативы (этап S113).
[0194] Устройство 190 управления работает таким способом в "окружении аварийной эвакуации".
[0195] Далее описывается работа устройства управления 190 в "окружении переноса полосы движения к пункту назначения". Например, как проиллюстрировано на фиг. 2, устройство 190 управления определяет, на основе информации по движению рассматриваемого транспортного средства, то, удовлетворяется или нет такое условие определения, что "пункт назначения задается" и "время для прибытия в точку смены полосы движения, необходимую для прибытия в пункт назначения, составляет в пределах 60 секунд". Когда условие определения удовлетворяется, устройство 190 управления определяет то, что окружение движения представляет собой "окружение переноса полосы движения к пункту назначения" (этап S102), и устройство 190 управления получает информацию представления, соответствующую "окружению переноса полосы движения к пункту назначения" (этап S103). Фиг. 11 является видом, иллюстрирующим пример информации представления, которая отображается на экране дисплея в качестве устройства 150 представления в "окружении переноса полосы движения к пункту назначения".
[0196] Затем устройство 190 управления определяет режим представления каждой альтернативы, включенной в информацию представления, на основе информации по движению рассматриваемого транспортного средства (этап S106). Например, в примере, проиллюстрированном на фиг. 11, информация представления, соответствующая "окружению переноса полосы движения к пункту назначения", включает в себя такую информацию сообщений, как "Разветвление обнаружено впереди. Продолжение движения в направлении влево обеспечивает возможность заблаговременного прибытия в пункт назначения. Какое действие следует выбрать?" вместе с такими альтернативами, как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", которые водитель может выполнять в "окружении переноса полосы движения к пункту назначения". В этом случае, устройство 190 управления может определять режим представления каждой альтернативы на основе информации по движению, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0197] Например, устройство 190 управления может изменять режим представления альтернативы, такой как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", на основе другого транспортного средства и/или помехи, присутствующей рядом с рассматриваемым транспортным средством, из состояний движения рассматриваемого транспортного средства. Когда другое транспортное средство присутствует сбоку от рассматриваемого транспортного средства, и/или когда такая помеха, как стенка и бордюрный камень, присутствует сбоку от рассматриваемого транспортного средства, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу, соответствующую смене полосы движения в направлении, в котором присутствуют другое транспортное средство и/или помеха.
[0198] Помимо этого или альтернативно, устройство 190 управления может изменять режим представления альтернативы, такой как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", на основе правил дорожного движения и/или дорожного знака из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что в зоне запрета смены полосы движения, водитель не может легко выбирать альтернативу "сменить полосу движения влево" и альтернативу "сменить полосу движения вправо".
[0199] Помимо этого или альтернативно, в случае если альтернатива "сменить полосу движения влево" или "сменить полосу движения вправо" выполняется для того, чтобы продолжать двигаться в направлении влево или вправо на разветвлении, время для прибытия в пункт назначения должно задерживаться на предварительно определенное время или более, устройство 190 управления может определять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу, соответствующую смене полосы движения к такому направлению. Например, в случае если смена полосы движения вправо выполняется для того, чтобы продолжать движение по правосторонней полосе движения, время для прибытия в пункт назначения должно задерживаться на предварительно определенное время или более, устройство 190 управления может определять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу "сменить полосу движения вправо".
[0200] Дополнительно, устройство 190 управления определяет альтернативу по умолчанию из числа альтернатив, таких как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", которые водитель может выполнять в "окружении переноса полосы движения к пункту назначения", на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S107).
[0201] Например, устройство 190 управления может определять альтернативу, с которой рассматриваемое транспортное средство должно продолжать двигаться в направлении к пункту назначения, в качестве альтернативы по умолчанию, из числа альтернатив, таких как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо". Если, например, рассматриваемое транспортное средство может двигаться по направлению к пункту назначения при смене полосу движения вправо, чтобы продолжать движение по правосторонней полосе движения, устройство 190 управления может определять альтернативу "сменить полосу движения вправо" в качестве альтернативы по умолчанию.
[0202] Затем устройство 190 управления определяет условие представления информации представления в "окружении переноса полосы движения к пункту назначения" (этап S109). Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления получает такое условие, что "время для прибытия в точку смены полосы движения составляет S12 или меньше", в качестве условия представления информации представления в "окружении переноса полосы движения к пункту назначения".
[0203] Когда рассматриваемое транспортное средство удовлетворяет условию представления, устройство 190 управления представляет информацию представления водителю в вышеописанном режиме представления альтернативы в состоянии, в котором вышеописанная альтернатива по умолчанию выбирается (этап S109). После этого, когда водитель вводит информацию ответа, либо когда такое условие отмены ожидания, что "время для прибытия в точку смены полосы движения составляет S13 (S12 > S13) или меньше", удовлетворяется, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе выбранной альтернативы (этап S113).
[0204] Устройство 190 управления работает таким способом в "окружении переноса полосы движения к пункту назначения".
[0205] Далее описывается работа устройства управления 190 в "окружении движения по направлению к зоне обслуживания (SA)/зоне парковки (PA)". Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления определяет то, удовлетворяется или нет такое условие определения, что "время для прибытия в SA/PA составляет в пределах 60 секунд", на основе информации по движению рассматриваемого транспортного средства. Когда условие определения удовлетворяется, устройство 190 управления определяет то, что окружение движения представляет собой "окружение движения по направлению к SA/PA" (этап S102), и устройство 190 управления получает информацию представления, соответствующую "окружению движения по направлению к SA/PA" (этап S103). Фиг. 12 является видом, иллюстрирующим пример информации представления, которая отображается на экране дисплея в качестве устройства 150 представления в "окружении движения по направлению к SA/PA".
[0206] Затем устройство 190 управления определяет режим представления каждой альтернативы, включенной в информацию представления, на основе информации по движению рассматриваемого транспортного средства (этап S106). Например, в примере, проиллюстрированном на фиг. 12, информация представления, соответствующая "окружению движения по направлению к SA/PA", включает в себя такую информацию сообщений, как "Зона парковки обнаружена слева. Какое действие следует выбрать?" вместе с такими альтернативами, как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", которые водитель может выполнять в "окружении движения по направлению к SA/PA". В этом случае, устройство 190 управления определяет режим представления каждой альтернативы на основе информации по движению, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0207] Например, устройство 190 управления может изменять режим представления альтернативы, такой как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", на основе другого транспортного средства и/или помехи, присутствующей рядом с рассматриваемым транспортным средством, из состояний движения рассматриваемого транспортного средства. Когда другое транспортное средство присутствует сбоку от рассматриваемого транспортного средства, и/или когда такая помеха, как стенка и бордюрный камень, присутствует сбоку от рассматриваемого транспортного средства, устройство 190 управления может определять режим представления каждой альтернативы таким образом, что водитель не может легко выбирать альтернативу, соответствующую смене полосы движения в направлении, в котором присутствуют другое транспортное средство и/или помеха.
[0208] Помимо этого или альтернативно, устройство 190 управления может определять режим представления альтернативы, такой как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", на основе правил дорожного движения и/или дорожного знака из состояний дороги, по которой движется рассматриваемое транспортное средство. Например, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что в зоне запрета смены полосы движения, водитель не может легко выбирать альтернативу "сменить полосу движения влево" и альтернативу "сменить полосу движения вправо".
[0209] Помимо этого или альтернативно, устройство 190 управления может определять то, переполнена либо нет зона обслуживания или зона парковки. Когда зона обслуживания или зона парковки переполнена, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "продолжать движение". Устройство 190 управления может получать информацию в отношении того, переполнена либо нет зона обслуживания или зона парковки, с использованием связи между транспортным средством и дорожной инфраструктурой через устройство 170 связи, чтобы за счет этого определять то, переполнена либо нет зона обслуживания или зона парковки.
[0210] Дополнительно, устройство 190 управления определяет альтернативу по умолчанию из числа альтернатив, таких как "сменить полосу движения влево", "продолжать движение" и "сменить полосу движения вправо", которые водитель может выполнять в "окружении движения по направлению к SA/PA", на основе состояния движения, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством (этап S107).
[0211] Например, когда водитель продолжает осуществлять вождение в течение двух часов или более без перерыва, и зона обслуживания или зона парковки присутствует впереди, устройство 190 управления может определять альтернативу для смены полосы движения на полосу движения сбоку от въезда в зону обслуживания или зону парковки в качестве альтернативы по умолчанию. Устройство 190 управления в противном случае может определять альтернативу "продолжать движение" в качестве альтернативы по умолчанию.
[0212] Затем устройство 190 управления определяет условие представления информации представления в "окружении движения по направлению к SA/PA" (этап S109). Например, в примере, проиллюстрированном на фиг. 2, устройство 190 управления получает такое условие, что "время для прибытия в SA/PA составляет S14 или меньше", в качестве условия представления информации представления в "окружении движения по направлению к SA/PA".
[0213] В то время, когда рассматриваемое транспортное средство удовлетворяет условию представления, устройство 190 управления представляет информацию представления водителю в вышеописанном режиме представления альтернативы в состоянии, в котором вышеописанная альтернатива по умолчанию выбирается (этап S109). После этого, когда водитель вводит информацию ответа, либо когда такое условие отмены ожидания, что "время для прибытия в SA/PA составляет S15 (S14 > S15) или меньше", удовлетворяется, устройство 190 управления управляет движением рассматриваемого транспортного средства на основе выбранной альтернативы (этап S113).
[0214] Устройство 190 управления работает таким способом в "окружении движения по направлению к SA/PA".
[0215] В настоящем варианте осуществления, водитель может управлять устройством 160 ввода таким образом, чтобы обеспечивать возможность устройству 190 управления представлять информацию представления для запроса смены полосы движения водителя, как проиллюстрировано на фиг. 13. Например, информация представления, проиллюстрированная на фиг. 13 включает в себя такую информацию сообщений, как "Какое направление следует выбрать для смены полосы движения?" вместе с такими альтернативами, как "сменить полосу движения влево", "отменить" и "сменить полосу движения вправо". В этом случае, устройство 190 управления может изменять режим представления каждой альтернативы на основе информации по движению, к примеру, состояния вождения водителя, состояния движения рассматриваемого транспортного средства, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
[0216] Например, когда другое транспортное средство присутствует сбоку от рассматриваемого транспортного средства, и/или когда такая помеха, как стенка и бордюрный камень, присутствует сбоку от рассматриваемого транспортного средства, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "отменить". Когда рассматриваемое транспортное средство движется в зоне запрета смены полосы движения, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "отменить". Когда разность между скоростью транспортного средства, заданной для рассматриваемого транспортного средства, и скоростью транспортного средства для движущегося впереди транспортного средства меньше 10 км/ч, устройство 190 управления может изменять режим представления каждой альтернативы таким образом, что водитель может легко выбирать альтернативу "отменить". Это обусловлено тем, что время, требуемое для обгона движущегося впереди транспортного средства, является большим.
[0217] Когда информация представления для запроса смены полосы движения водителя представляется вышеуказанным способом, устройство 190 управления может определять альтернативу "отменить" в качестве альтернативы по умолчанию, которая должна первоначально выбираться.
[0218] Устройство 190 управления может задавать такое условие, что N секунд прошло после представления информации представления для выполнения запроса в отношении смены полосы движения водителю, например, в качестве условия отмены ожидания. Когда водитель не вводит информацию ответа, устройство 190 управления может управлять движением рассматриваемого транспортного средства на основе альтернативы по умолчанию после того, как N секунд прошло после представления информации представления. Когда водитель выполняет операцию бортового оборудования 140, устройство 190 управления может продлевать N секунд условия отмены ожидания приблизительно на пять секунд.
[0219] Как указано выше, в настоящем варианте осуществления, окружение движения определяется на основе состояния движения рассматриваемого транспортного средства, и информация представления, соответствующая окружению движения, представляется водителю. Когда водитель вводит информацию ответа в ответ на информацию представления, движение рассматриваемого транспортного средства управляется на основе информации ответа, вводимой водителем. Посредством этой операции, управление движением может выполняться на основе определения водителем, и некомфортное ощущение, возникающее у водителя, может уменьшаться, когда выполняется управление движением.
[0220] В настоящем варианте осуществления, информация представления ассоциирована со своим уровнем приоритета. Когда фактическое окружение движения рассматриваемого транспортного средства подпадает под окружения движения, соответствующие двум или более элементов информации представления, водителю представляется информация представления в отношении того, какой уровень приоритета является наибольшим. Водителю ввиду этого может надлежащим образом представляться информация представления, которая требуется водителю.
[0221] В настоящем варианте осуществления, альтернатива, которая является подходящей для состояния движения рассматриваемого транспортного средства, определяется в качестве альтернативы по умолчанию в каждом окружении движения, и информация представления представляется водителю в состоянии, в котором альтернатива по умолчанию предварительно выбирается. Эта операция может уменьшать нагрузку водителя при выборе альтернативы и обеспечивать возможность водителю ощущать себя в большей безопасности. Когда водитель не вводит информацию ответа, и условие отмены ожидания удовлетворяется после того, как информация представления представляется водителю в состоянии, в котором альтернатива по умолчанию предварительно выбирается, рассматриваемое транспортное средство может управляться на основе альтернативы по умолчанию. Посредством этой операции, движение рассматриваемого транспортного средства может надлежащим образом управляться даже в ситуации, в которой водитель не может выбирать альтернативу.
[0222] В вышеописанном варианте осуществления, режим представления каждой альтернативы может изменяться на основе состояния движения рассматриваемого транспортного средства таким образом, что водитель может (или не может) легко выбирать часть множества альтернатив, включенных в информацию представления. Эта операция может облегчать для водителя выбор альтернативы, которая предпочтительно должна выбираться водителем (или затруднять водителю выбор альтернативы, которая не должна предпочтительно выбираться водителем) в каждом окружении движения. Нагрузка водителя при выборе альтернативы ввиду этого может уменьшаться.
[0223] В настоящем варианте осуществления, информация представления представляется пользователю в то время, когда условие представления, ассоциированное с информацией представления, удовлетворяется. Эта операция может уменьшать стресс пользователя вследствие представления информации представления в течение длительного времени. В настоящем варианте осуществления, информация представления может изменяться на основе состояния движения рассматриваемого транспортного средства, чтобы за счет этого обеспечивать возможность представления информации представления во время, подходящее для состояния движения рассматриваемого транспортного средства.
[0224] Второй вариант осуществления
Далее описывается устройство управления движением согласно второму варианту осуществления. Устройство 100 управления движением согласно второму варианту осуществления имеет конфигурацию, идентичную конфигурации устройства 100 управления движением согласно первому варианту осуществления, и работает идентично первому варианту осуществления за исключением того, что устройство 100 управления движением работает так, как описано ниже.
[0225] Устройство 190 управления согласно второму варианту осуществления дополнительно имеет функцию хранения информации предыстории, функцию оценки состояния водителя и функцию специального управления движением в дополнение к функциям устройства 190 управления согласно первому варианту осуществления. Ниже описывается каждая функция.
[0226] Устройство 190 управления использует функцию хранения информации предыстории, чтобы сохранять информацию предыстории в запоминающем устройстве устройства 190 управления. Информация предыстории включает в себя число представлений информации представления посредством устройства 150 представления. Устройство 190 управления сохраняет информацию предыстории, которая включает в себя число вводов информации ответа посредством устройства 160 ввода, в запоминающем устройстве устройства 190 управления. Устройство 190 управления получает оперативную информацию бортового оборудования 140 из бортового оборудования 140 и сохраняет оперативную информацию предыстории в запоминающем устройстве устройства 190 управления. Оперативная информация предыстории включает в себя число операций бортового оборудования 140 водителем.
[0227] Устройство 190 управления использует функцию оценки состояния водителя для того, чтобы оценивать состояние водителя на основе информации предыстории информации представления, информации предыстории информации ответа и оперативной информации предыстории бортового оборудования 140. Например, устройство 190 управления получает число D представлений информации представления и число I вводов информации ответа в течение предварительно определенного периода времени (например, десяти минут) до настоящего момента из запоминающего устройства из устройства 190 управления. Затем устройство 190 управления определяет то, не превышает либо превышает значение (I/D), полученное посредством деления числа I вводов информации ответа в течение предварительно определенного периода времени на число D представлений информации представления, предварительно определенное значение T1, как представлено посредством выражения (1) ниже.
(число I вводов информации ответа/число D представлений информации представления) ≤предварительно определенное значение T1... (1)
Когда число D представлений информации представления является нулем, вышеприведенное уравнение (1) применяется при условии, что число D представлений является единицей.
[0228] Устройство 190 управления дополнительно получает число H операций бортового оборудования 140 в течение предварительно определенного периода времени (например, десяти минут) до настоящего момента на основе оперативной информации предыстории бортового оборудования 140. Затем устройство 190 управления определяет то, не превышает либо превышает число H операций бортового оборудования 140 предварительно определенное значение T2, как представлено посредством выражения (2) ниже.
число H операций бортового оборудования 140≤предварительно определенное значение T2... (2)
[0229] Когда условия вышеприведенных выражений (1) и (2) удовлетворяются, устройство 190 управления оценивает то, что водитель может находиться в опасном состоянии, в котором водитель не может отвечать на информацию представления, к примеру, вследствие внезапного недомогания.
[0230] Когда функция оценки состояния водителя оценивает то, что водитель может находиться в опасном состоянии, устройство 190 управления использует функцию специального управления движением для того, чтобы осуществлять управление для эвакуации рассматриваемого транспортного средства в пространство эвакуации. Например, устройство 190 управления выполняет поиск пространства, в которое может эвакуироваться рассматриваемое транспортное средство, и использует функцию управления движением для того, чтобы перемещать рассматриваемое транспортное средство в пространство эвакуации и парковать рассматриваемое транспортное средство в пространстве эвакуации. Ниже описывается подробный контент процесса специального управления движением, выполняемого посредством функции специального управления движением.
[0231] Во втором варианте осуществления, когда функция оценки состояния водителя оценивает то, что водитель может находиться в опасном состоянии, устройство 190 управления использует функцию представления для того, чтобы представлять информацию представления для запроса в отношении того, эвакуировать или нет в пространство эвакуации водителя. Здесь, фиг. 14 является видом, иллюстрирующим пример информации представления, которая отображается посредством устройства 150 представления в специальном управлении движением согласно второму варианту осуществления. Например, устройство 190 управления может представлять информацию представления, как проиллюстрировано на фиг. 14, которая включает в себя такую информацию сообщений, как "Управление аварийной эвакуацией должно быть выполнено, поскольку не обнаруживается операций в течение определенного периода. Если следует отменить, выберите альтернативу "отменить" в пределах определенного времени". Информация представления дополнительно может включать в себя такую информацию относительно оставшегося времени, в течение которого управление эвакуацией может отменяться, как "осталось XX секунд".
[0232] В этом случае, устройство 190 управления может представлять информацию представления, которая включает в себя две альтернативы "выполнить" и "отменить" для управления эвакуацией. Альтернатива "отменить" может представляться в качестве альтернативы по умолчанию. Во втором варианте осуществления, когда водитель не выбирает альтернативы, и время, в течение которого может отменяться управление эвакуацией, становится нулем, устройство 190 управления выполняет управление эвакуацией (специальное управление движением), чтобы эвакуировать рассматриваемое транспортное средство в пространство эвакуации. Таким образом, во втором варианте осуществления, альтернатива "отменить" задается в качестве альтернативы по умолчанию таким образом, что водитель может легко выбирать альтернативу "отменить" для управления эвакуацией, но когда водитель не отвечает в течение определенного периода времени, альтернатива по умолчанию не выбирается, и управление эвакуацией выполняется.
[0233] Далее, со ссылкой на фиг. 15, описывается процесс специального управления движением согласно второму варианту осуществления. Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей процесс специального управления движением согласно второму варианту осуществления. Процесс специального управления движением, описанный ниже, может выполняться, например, посредством устройства 190 управления параллельно с процессом управления движением согласно первому варианту осуществления. Процесс специального управления движением выполняется повторяющимся способом с регулярными интервалами.
[0234] На этапе S201, устройство 190 управления использует функцию оценки состояния водителя для того, чтобы получать информацию предыстории. В частности, устройство 190 управления использует функцию оценки состояния водителя для того, чтобы получать информацию предыстории информации представления, которая представляется посредством устройства 150 представления, информацию предыстории информации ответа, которая вводится через устройство 160 ввода, и оперативную информацию предыстории бортового оборудования 140 из запоминающего устройства из устройства 190 управления.
[0235] На этапе S202, устройство 190 управления использует функцию оценки состояния водителя для того, чтобы определять то, не превышает либо превышает значение (I/D), полученное посредством деления числа I вводов информации ответа на число D представлений информации представления, предварительно определенное значение T1, как представлено посредством вышеприведенного выражения (1). Когда значение (I/D) не превышает предварительно определенное значение T1, т.е. когда часть ответа на информацию представления водителем является низкой, процедура переходит к этапу S203. Когда значение (I/D) превышает предварительно определенное значение T1, т.е. когда часть ответа на информацию представления водителем является высокой, процедура переходит к этапу S208. На этапе S208, устройство 190 управления продолжает процесс управления движением, проиллюстрированный на фиг. 4.
[0236] На этапе S203, устройство 190 управления определяет то, не превышает либо превышает число H операций бортового оборудования 140 предварительно определенное значение T2, на основе оперативной информации предыстории бортового оборудования 140, которая получается на этапе S201. Когда число H операций бортового оборудования 140 превышает предварительно определенное значение T2, процедура переходит к этапу S208, на котором процесс управления движением, проиллюстрированный на фиг. 4, продолжается. Когда число H операций бортового оборудования 140 не превышает предварительно определенное значение T2, процедура переходит к этапу S204.
[0237] На этапе S204, поскольку значение (I/D), полученное посредством деления числа I вводов информации ответа на число D представлений информации представления, не превышает предварительно определенное значение T1, и число H операций бортового оборудования 140 не превышает предварительно определенное значение T2, устройство 190 управления использует функцию оценки состояния водителя для того, чтобы оценивать то, что водитель может находиться в опасном состоянии, в котором водитель не может отвечать на информацию представления, к примеру, вследствие внезапного недомогания. Чтобы справляться с такой ситуацией, функция специального управления движением используется для того, чтобы выполнять поиск пространства эвакуации, в которое эвакуируется рассматриваемое транспортное средство.
[0238] Например, когда рассматриваемое транспортное средство движется на шоссе, устройство 190 управления может выполнять поиск ближайшей зоны парковки или зоны обслуживания в качестве пространства эвакуации на основе картографической информации картографической базы 130 данных. Помимо этого или альтернативно, когда рассматриваемое транспортное средство находится на дороге, на которой парковка разрешается на обочине дороги, устройство 190 управления может использовать функцию специального управления движением для того, чтобы выполнять поиск пространства на обочине дороги, в котором рассматриваемое транспортное средство может парковаться, на основе результатов обнаружения камеры переднего вида, боковых радаров и т.д., включенных в датчик 110.
[0239] На этапе S205, устройство 190 управления использует функцию представления для того, чтобы представлять информацию представления в отношении того, следует или нет выполнять управление эвакуацией, как проиллюстрировано на фиг. 14, водителю. Помимо этого или альтернативно, функция представления может использоваться для того, чтобы представлять информацию представления посредством голоса и т.п. При представлении информации представления, функция представления может использоваться для того, чтобы задавать альтернативу "отменить" в качестве альтернативы по умолчанию.
[0240] Затем на этапе S206, устройство 190 управления использует функцию специального управления движением для того, чтобы определять то, выбирает или нет водитель какую-либо из альтернатив "выполнить" и "отменить" для управления эвакуацией (специального управления движением) в ответ на информацию представления, которая представляется на этапе S205. Когда водитель выбирает любую из альтернатив, процедура переходит к этапу S207. Когда водитель не выбирает обе альтернативы, процедура переходит к этапу S209.
[0241] На этапе S207, поскольку определяется то, что водитель выбирает любую из альтернатив, устройство 190 управления использует функцию специального управления движением для того, чтобы определять то, выбирает или нет водитель альтернативу "отменить" для управления эвакуацией (специального управления движением) в ответ на информацию представления, которая представляется на этапе S205. Когда водитель выбирает альтернативу "отменить" для управления эвакуацией, процедура переходит к этапу S208, чтобы продолжать процесс управления движением, как проиллюстрировано на фиг. 4. Когда водитель выбирает альтернативу "выполнить" для управления эвакуацией, процедура переходит к этапу S210, чтобы выполнять управление эвакуацией (специальное управление движением).
[0242] Когда, на этапе S206, водитель не выбирает обе альтернативы, процедура переходит к этапу S209, в котором устройство 190 управления использует функцию специального управления движением для того, чтобы определять то, прошло или нет предварительно определенное время после представления на этапе S205 информации представления выполнения относительно управления эвакуацией (специального управления движением) в состоянии, в котором водитель не вводит информацию ответа. Когда предварительно определенное время не прошло, процедура переходит к этапу S208, на котором процесс управления движением, проиллюстрированный на фиг. 4, продолжается. Когда предварительно определенное время прошло без ответа от водителя, процедура переходит к этапу S210, чтобы выполнять управление эвакуацией (специальное управление движением).
[0243] На этапе S206, S207 или S209, даже если водитель непосредственно не выбирает представление "отменить" на дисплее устройства 150 представления через устройство 160 ввода, когда водитель выполняет некоторую операцию, к примеру, операцию с рулевым механизмом и/или педалью акселератора и операцию бортового оборудования 140, устройство 190 управления может считать, что альтернатива "отменить" для управления эвакуацией (специального управления движением) выбирается, и процедура может переходить к этапу S208.
[0244] На этапах S210-S212, устройство 190 управления использует функцию специального управления движением для того, чтобы выполнять управление эвакуацией (специальное управление движением). Во-первых, на этапе S210, устройство 190 управления использует функцию специального управления движением для того, чтобы начинать мигание ламп сигнала аварийной остановки. Мигание ламп сигнала аварийной остановки может информировать других водителей в периферийных транспортных средствах в отношении опасного состояния водителя в рассматриваемом транспортном средстве и начала управления эвакуацией. Затем на этапе S211, устройство 190 управления использует функцию специального управления движением для того, чтобы выполнять управление эвакуацией, в котором рассматриваемое транспортное средство автоматически перемещается в пространство эвакуации, найденное на этапе S204. После того, как рассматриваемое транспортное средство перемещается в пространство эвакуации, процедура переходит к этапу S212, устройство 190 управления использует функцию специального управления движением для того, чтобы парковать рассматриваемое транспортное средство в пространстве эвакуации. Например, устройство 190 управления может автоматически управлять парковочным тормозом, чтобы парковать рассматриваемое транспортное средство в пространстве эвакуации.
[0245] Как указано выше, устройство 100 управления движением согласно второму варианту осуществления оценивает то, может или нет водитель находиться в опасном состоянии, в котором водитель не может отвечать на информацию представления, на основе информации предыстории информации представления и информации ответа, а также оперативной информации предыстории бортового оборудования 140. После этого, когда оценивается то, что водитель может находиться в опасном состоянии, водителю представляется информация представления в отношении того, следует или нет выполнять управление эвакуацией (специальное управление движением) для эвакуации рассматриваемого транспортного средства в пространство эвакуации. После этого, когда водитель выбирает выполнение управления эвакуацией, либо когда водитель не может отвечать на информацию представления, управление эвакуацией выполняется, и рассматриваемое транспортное средство автоматически эвакуируется в пространство эвакуации. Согласно второму варианту осуществления, следующее преимущество может получаться в дополнение к преимуществам первого варианта осуществления. Таким образом, даже когда водитель находится в опасном состоянии, в котором водитель не может отвечать на информацию представления, рассматриваемое транспортное средство может двигаться в пространство эвакуации, чтобы за счет этого безопасно защищать водителя.
[0246] Во втором варианте осуществления, альтернатива "отменить" может задаваться в качестве альтернативы по умолчанию из числа альтернатив, включенных в информацию представления. Эта настройка обеспечивает возможность водителю быстро отражать намерение водителя отказываться от перехода от управления движением к управлению эвакуацией (специальному управлению движением).
[0247] Во втором варианте осуществления, примерно иллюстрируется конфигурация, в которой выполняется поиск пространства эвакуации, и рассматриваемое транспортное средство перемещается в пространство эвакуации, но настоящее изобретение не ограничено этой конфигурацией. Может быть возможной другая конфигурация, в которой рассматриваемое транспортное средство паркуется на обочине дороги, например, при условии, что рассматриваемое транспортное средство может парковаться около текущей позиции или на обочине дороги в аварийных случаях. Также в таких случаях, водитель может быть безопасно защищен, когда водитель находится в опасном состоянии, в котором водитель не может отвечать на информацию представления.
[0248] Третий вариант осуществления
Далее описывается устройство управления движением согласно третьему варианту осуществления. Устройство 100 управления движением согласно третьему варианту осуществления имеет конфигурацию, идентичную конфигурации устройства 100 управления движением согласно второму варианту осуществления и работает идентично второму варианту осуществления за исключением того, что устройство 100 управления движением работает так, как описано ниже.
[0249] В третьем варианте осуществления, устройство 190 управления использует функцию оценки состояния водителя для того, чтобы оценивать то, может или нет водитель находиться в спящем состоянии (включающем в себя сонливое состояние), на основе информации предыстории информации представления, представленной посредством устройства 150 представления, информации предыстории информации ответа, вводимой через устройство 160 ввода, и оперативной информации предыстории бортового оборудования 140. Например, устройство 190 управления может использовать функцию оценки состояния водителя для того, чтобы определять то, что водитель может находиться в спящем состоянии, когда удовлетворяются условия вышеприведенных выражений (1) и (2). Также может использоваться другая конфигурация, которая определяет то, находится или нет водитель в спящем состоянии, с использованием предварительно определенных значений T3 и T4 в качестве замены для предварительно определенных значений T1 и T2 в вышеприведенных выражениях (1) и (2). Предварительно определенные значения T3 и T4 меньше предварительно определенных значений T1 и T2, соответственно.
[0250] В третьем варианте осуществления, устройство 190 управления может использовать функцию специального управления движением и функцию оценки состояния водителя следующим образом. Таким образом, когда оценивается то, что водитель может находиться в спящем состоянии, устройство 190 управления может осуществлять управление (специальное управление движением) таким образом, чтобы отменять автоматическое движение посредством функции управления движением. Водитель ввиду этого может принуждаться осуществлять вождение и бодрствовать.
[0251] В третьем варианте осуществления, когда оценивается то, что водитель может находиться в спящем состоянии, устройство 190 управления использует функцию представления для того, чтобы представлять информацию представления для запроса, следует или нет отменять управление движением водителя посредством функции управления движением. Здесь, фиг. 16 является видом, иллюстрирующим пример информации представления, которая отображается посредством устройства 150 представления при управлении эвакуацией согласно третьему варианту осуществления. Например, устройство 190 управления может использовать функцию представления для того, чтобы представлять информацию представления, как проиллюстрировано на фиг. 16, которая включает в себя такую информацию сообщений, как "Не обнаруживается операций в течение определенного периода. Подтвердить отмену управления автоматическим движением? Если не следует подтверждать отмену, выберите альтернативу "не подтверждать отмену" в пределах определенного времени". Информация представления дополнительно может включать в себя такую информацию относительно оставшегося времени, в течение которого отмена автоматического движения может отбрасываться, как "осталось XX секунд".
[0252] В этом случае, функция представления может использоваться для того, чтобы представлять информацию представления, которая включает в себя две альтернативы "подтверждать отмену" и "не подтверждать отмену (отбрасывать отмену)". Альтернатива "не подтверждать отмену (отбрасывать отмену)" может представляться в качестве альтернативы по умолчанию. Это обеспечивает возможность водителю быстро выбирать альтернативу "не подтверждать отмену (отбрасывать отмену)".
[0253] Далее, со ссылкой на фиг. 17, описывается процесс специального управления движением согласно третьему варианту осуществления. Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей процесс специального управления движением согласно третьему варианту осуществления. Аналогично второму варианту осуществления, процесс специального управления движением, описанный ниже, может выполняться, например, посредством устройства 190 управления параллельно с процессом управления движением согласно первому варианту осуществления. Процесс специального управления движением выполняется повторяющимся способом с регулярными интервалами.
[0254] На этапах S301-S303, которые являются аналогичными этапам S201-S203 во втором варианте осуществления, получается информация предыстории (этап S301), выполняется определение в отношении того, не превышает либо превышает значение, полученное посредством деления числа I вводов информации ответа на число D представлений информации представления, предварительно определенное значение T1 (этап S302) и выполняется определение в отношении того, не превышает либо превышает число H операций бортового оборудования 140 предварительно определенное значение T2 (этап S303). После этого, когда значение, полученное посредством деления числа I вводов информации ответа на число D представлений информации представления, не превышает предварительно определенное значение T1 (этап S302="Да"), и число H операций бортового оборудования 140 не превышает предварительно определенное значение T2 (этап S303="Да"), оценивается то, что водитель может находиться в спящем состоянии, и процедура переходит к этапу S304.
[0255] На этапе S304, устройство 190 управления использует функцию представления для того, чтобы представлять информацию представления отмены автоматического движения водителю. В частности, устройство 190 управления представляет информацию представления отмены управления движением посредством функции управления движением, как проиллюстрировано на фиг. 16, водителю.
[0256] На этапе S305, устройство 190 управления использует функцию специального управления движением для того, чтобы определять то, выбирает или нет водитель какую-либо из альтернатив "подтверждать отмену" и "не подтверждать отмену (отбрасывать отмену)" для управления движением в ответ на информацию представления, которая представляется на этапе S304. Когда водитель выбирает любую из альтернатив, процедура переходит к этапу S306. Когда водитель не выбирает обе альтернативы, процедура переходит к этапу S308.
[0257] На этапе S306, поскольку определяется то, что водитель выбирает любую из альтернатив, устройство 190 управления использует функцию специального управления движением для того, чтобы определять то, выбирает или нет водитель альтернативу "не подтверждать отмену (отбрасывать отмену)" для управления движением в ответ на информацию представления, которая представляется на этапе S304. Когда водитель выбирает альтернативу "не подтверждать отмену (отбрасывать отмену)" для управления движением, процедура переходит к этапу S307, чтобы продолжать процесс управления движением, проиллюстрированный на фиг. 4. Когда водитель выбирает альтернативу "подтверждать отмену" для управления движением, процедура переходит к этапу S309, чтобы отменять управление движением.
[0258] Когда, на этапе S305, водитель не выбирает обе альтернативы, процедура переходит к этапу S308, на котором устройство 190 управления использует функцию специального управления движением для того, чтобы определять то, прошло или нет предварительно определенное время после представления на этапе S304 в состоянии, в котором водитель не вводит информацию ответа. Когда предварительно определенное время не прошло, процедура переходит к этапу S307, на котором процесс управления движением, проиллюстрированный на фиг. 4, продолжается. Когда предварительно определенное время прошло без ответа от водителя, процедура переходит к этапу S309, чтобы отменять управление движением.
[0259] На этапе S305, S306 или S308, даже если водитель непосредственно не выбирает представление альтернативы "не подтверждать отмену (отбрасывать отмену)" на дисплее устройства 150 представления через устройство 160 ввода, когда водитель выполняет некоторую операцию, к примеру, операцию с рулевым механизмом и/или педалью акселератора и операцию бортового оборудования 140, устройство 190 управления может считать, что альтернатива "не подтверждать отмену (отбрасывать отмену)" для управления движением выбирается, и процедура может переходить к этапу S307.
[0260] На этапе S309, устройство 190 управления использует функцию специального управления движением для того, чтобы отменять процесс управления движением. Таким образом, устройство 190 управления отменяет управление движением посредством функции управления движением. Эта операция приостанавливает процесс управления движением, проиллюстрированный на фиг. 4, и водитель должен сам осуществлять вождение.
[0261] Как указано выше, устройство 100 управления движением согласно третьему варианту осуществления оценивает то, может или нет водитель находиться в спящем состоянии (или сонливом состоянии), на основе информации предыстории информации представления и информации ответа и оперативной информации предыстории бортового оборудования 140. После этого, когда водитель может находиться в спящем состоянии (или сонливом состоянии), водителю представляется информация представления в отношении того, следует или нет отменять процесс управления движением, проиллюстрированный на фиг. 4. После этого, когда водитель выбирает выполнение отмены управления движением, либо когда водитель не может отвечать на информацию представления, процесс управления движением, проиллюстрированный на фиг. 4, приостанавливается, чтобы принуждать водителя осуществлять вождение. Согласно третьему варианту осуществления, следующее преимущество может получаться в дополнение к преимуществам первого варианта осуществления. Таким образом, когда водитель находится в спящем состоянии (или сонливом состоянии), водитель ввиду этого может принуждаться осуществлять вождение и бодрствовать.
[0262] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0263] Например, вышеописанные варианты осуществления примерно проиллюстрированы в качестве конфигурации, в которой информация представления, соответствующая "окружению настигания движущегося впереди транспортного средства", имеет две альтернативы "следовать за" и "выполнять обгон", но настоящее изобретение не ограничено этой конфигурацией. Эта конфигурация может модифицироваться, например, с возможностью иметь различные альтернативы, включающие в себя альтернативу "сменить полосу движения вправо и выполнять обгон". То же применимо к информации представления, соответствующей другим окружениям движения.
[0264] Вышеописанные второй и третий варианты осуществления примерно проиллюстрированы в качестве конфигурации, в которой альтернатива "отмены" специального управления движением задается в качестве альтернативы по умолчанию из числа альтернатив информации представления для запроса в отношении того, следует или нет выполнять специальное управление движением водителя, но настоящее изобретение не ограничено этой конфигурацией. Эта конфигурация может модифицироваться, например, с возможностью задавать альтернативу "выполнения" специального управления движением в качестве альтернативы по умолчанию. Эта конфигурация также может модифицироваться с возможностью изменять режим отображения альтернативы "выполнения" или "отмены" специального управления движением таким образом, что водитель может легко выбирать альтернативу "отменить" в качестве альтернативы по умолчанию.
[0265] В вышеописанных вариантах осуществления, датчик 110 соответствует модулю обнаружения настоящего изобретения, функция определения окружения движения устройства 190 управления соответствует модулю определения настоящего изобретения, устройство 190 управления соответствует модулю хранения настоящего изобретения, функции определения информации представления и функция представления устройства 190 управления и устройства 150 представления соответствуют модулю представления настоящего изобретения, устройство 160 ввода соответствует модулю ввода настоящего изобретения, и функция управления движением устройства 190 управления и устройства 180 управления приведением в движение соответствуют модулю управления настоящего изобретения.
Описание ссылочных обозначений
[0266] 100 - устройство управления движением
110 - датчик
120 - устройство обнаружения позиции рассматриваемого транспортного средства
130 - картографическая база данных
140 - бортовое оборудование
150 - устройство представления
160 - устройство ввода
170 - устройство связи
180 - устройство управления приведением в движение
190 - устройство управления

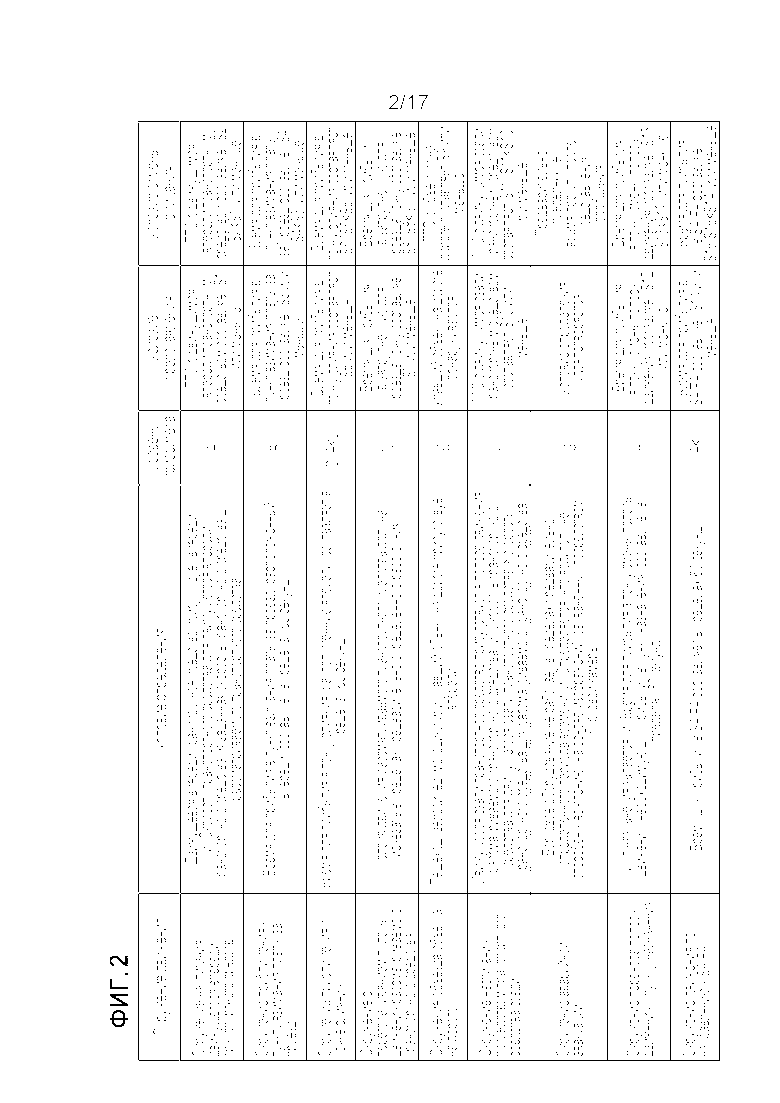
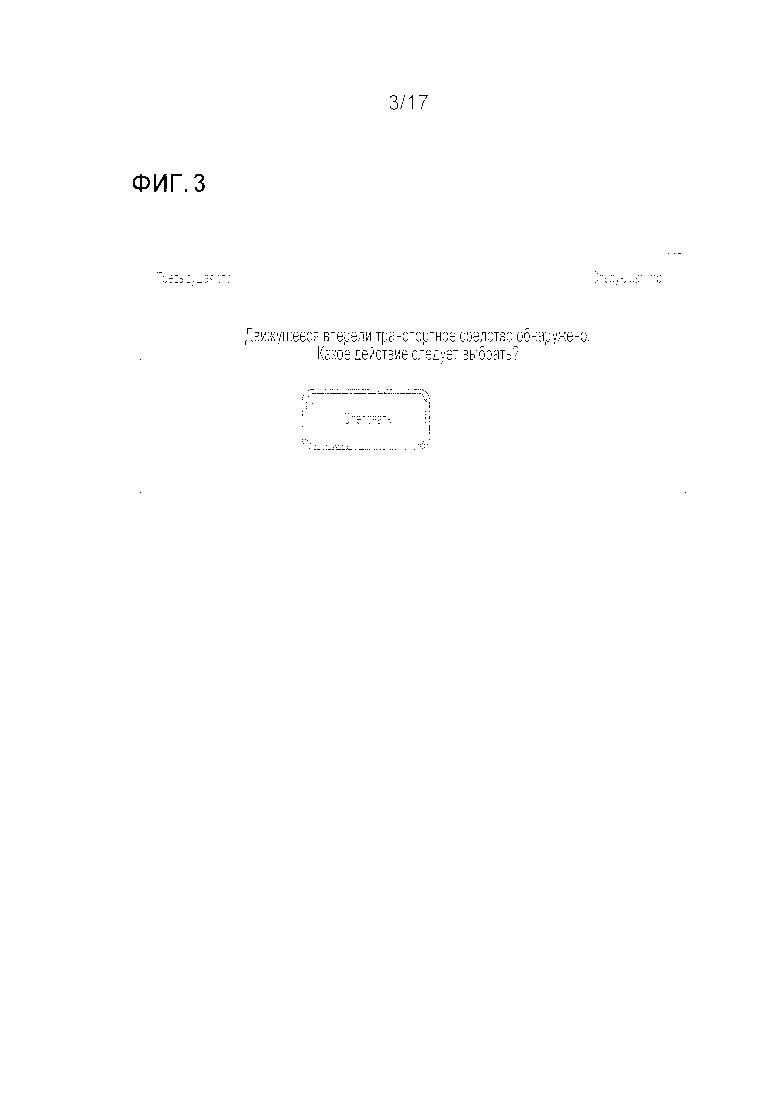
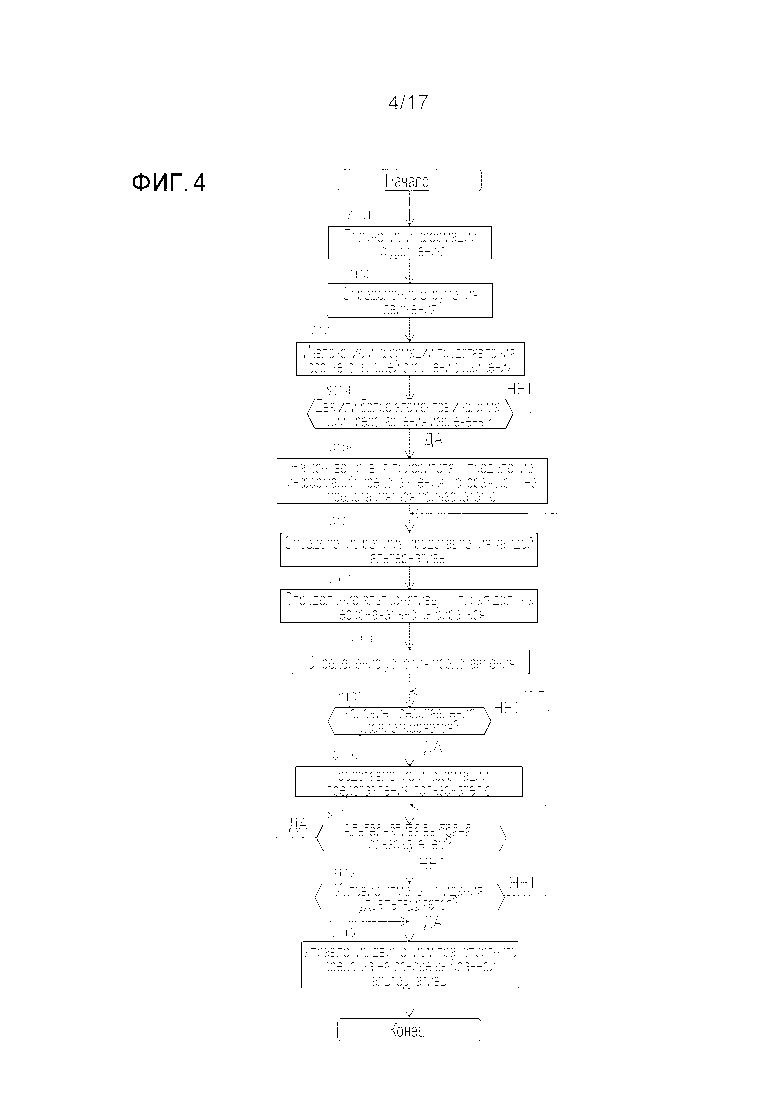
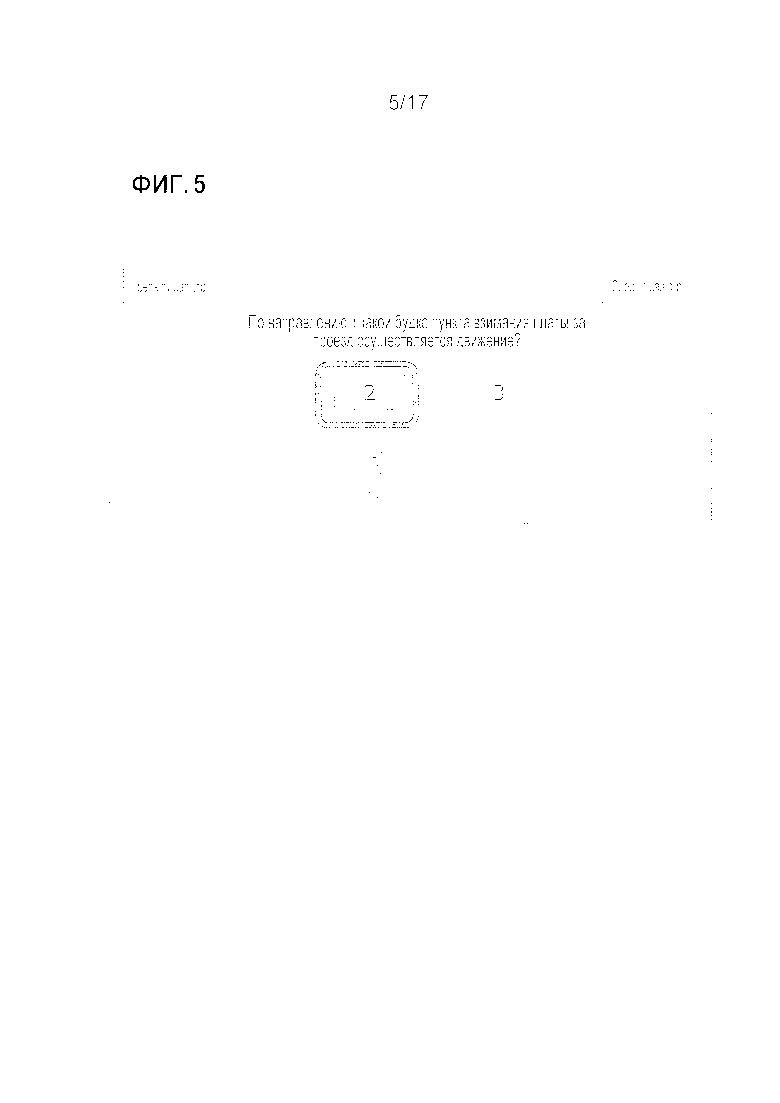
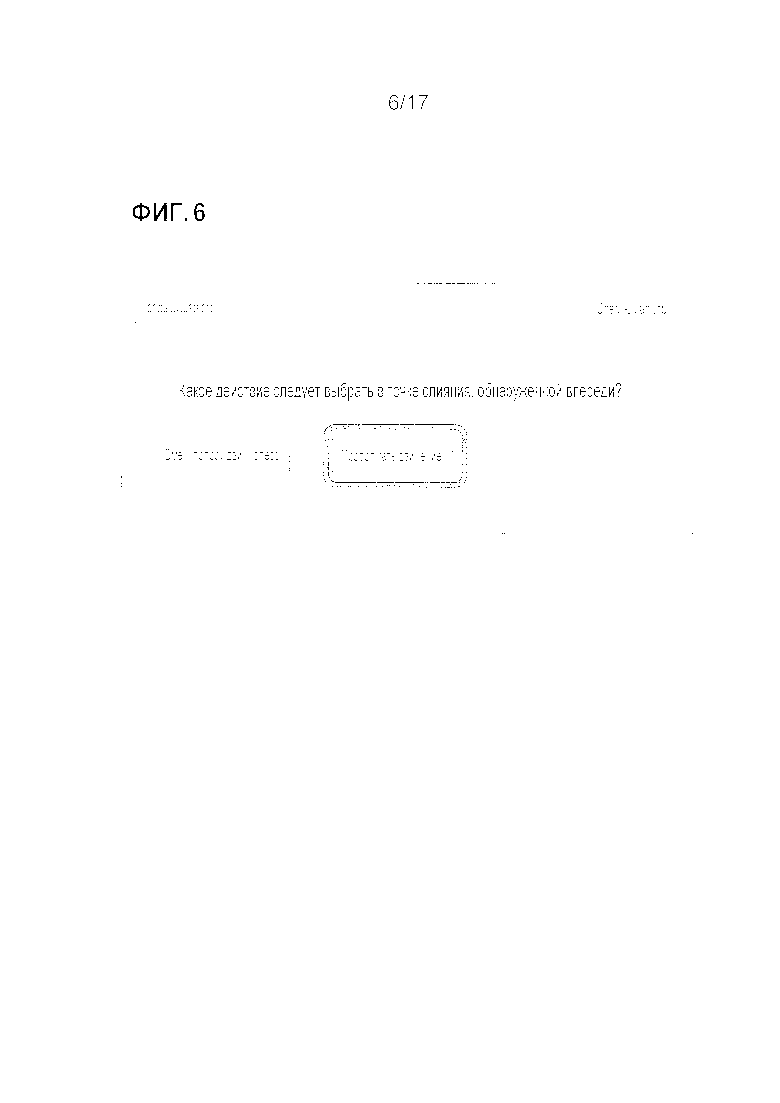
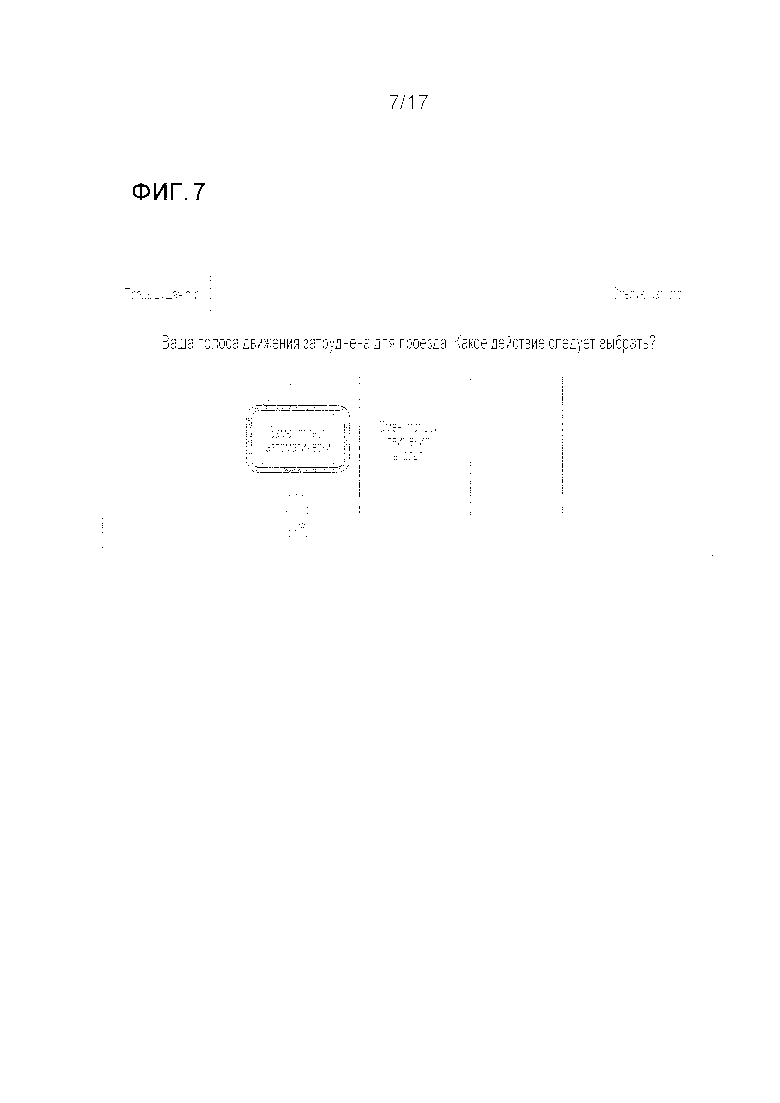
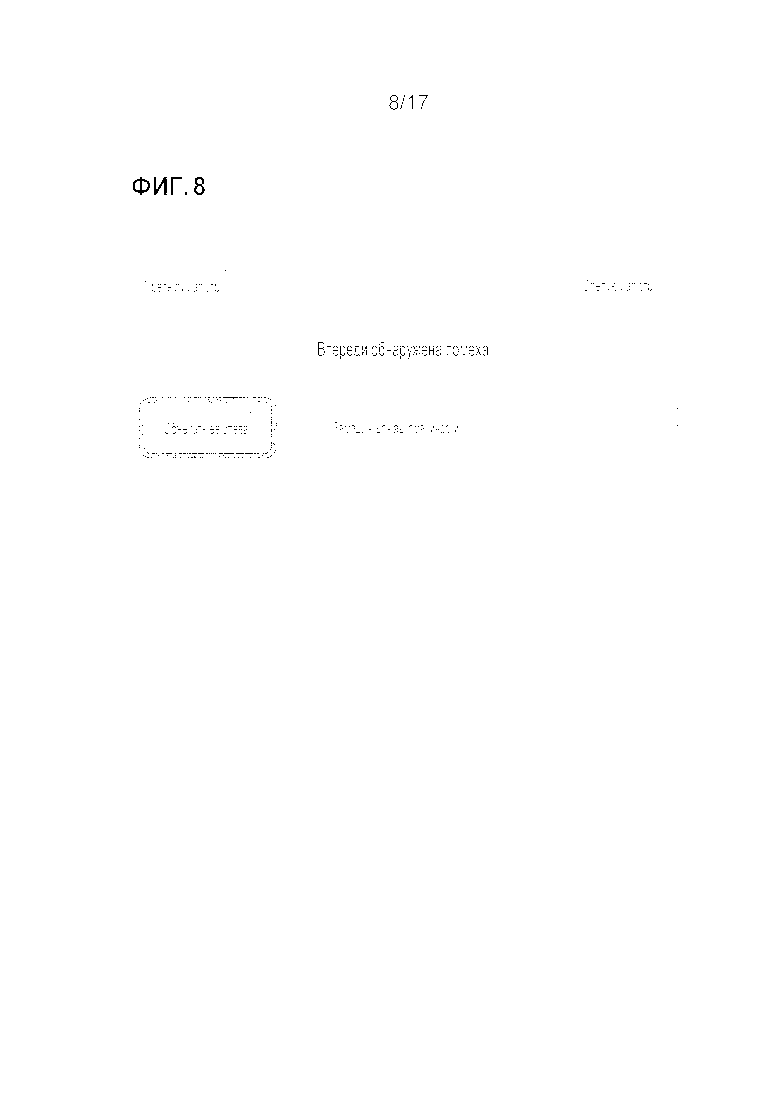
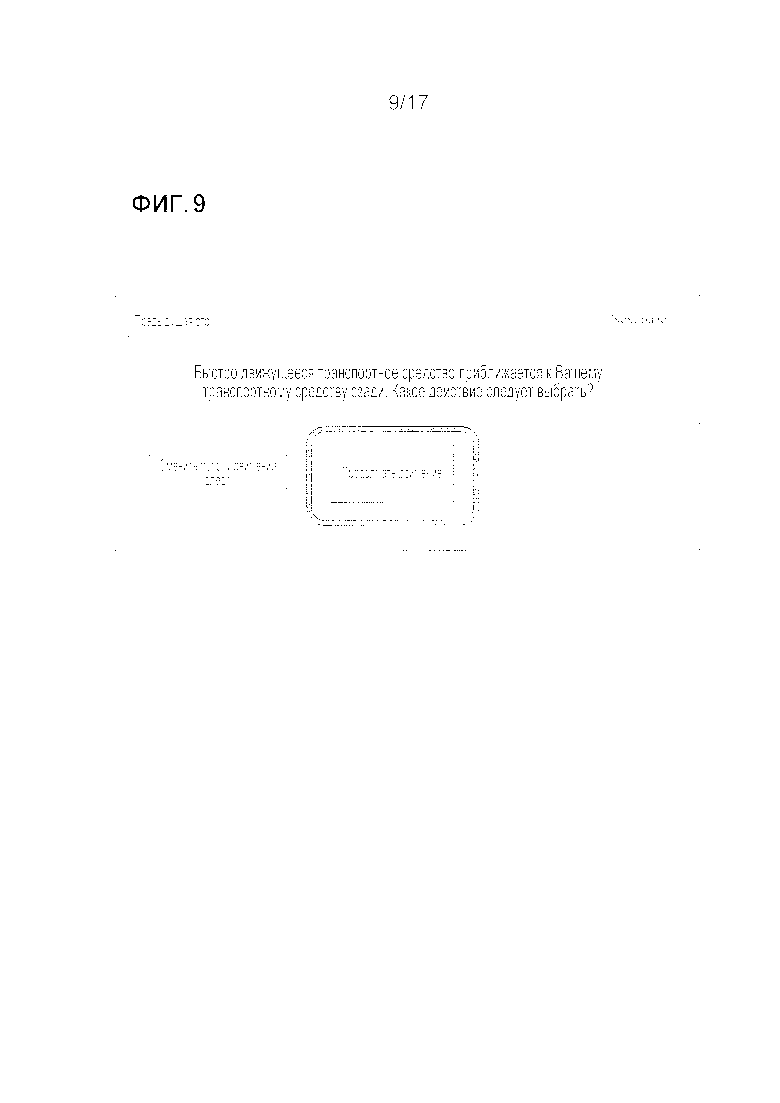
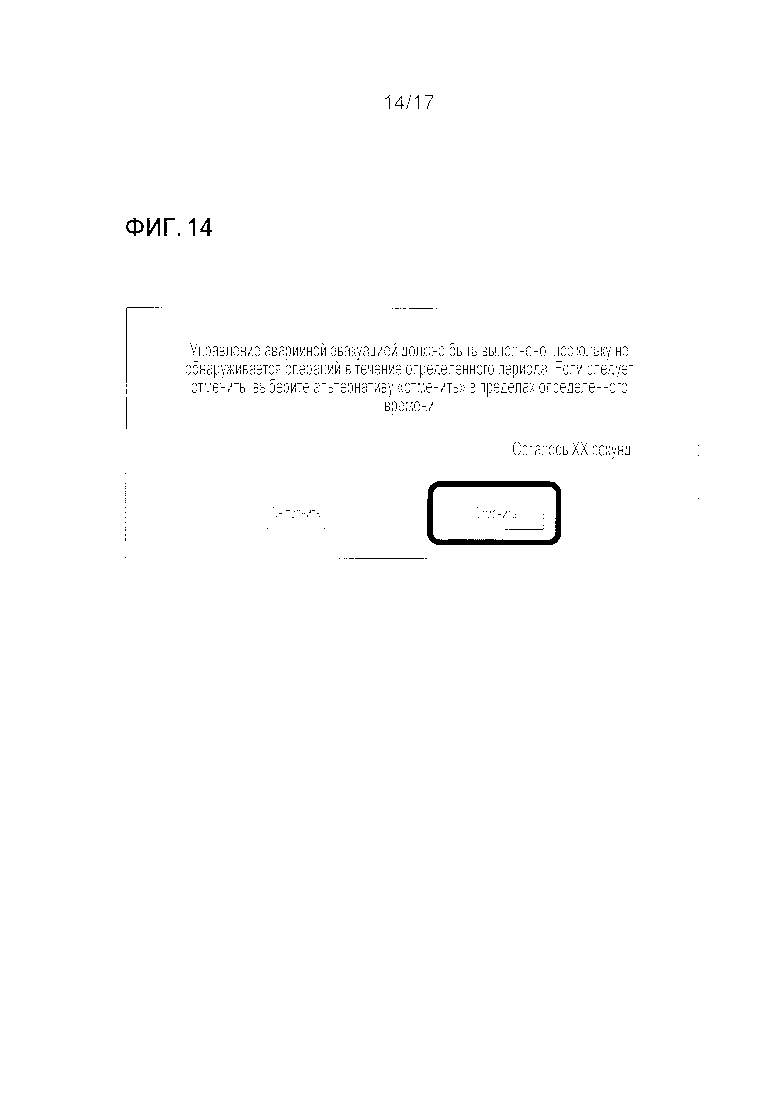
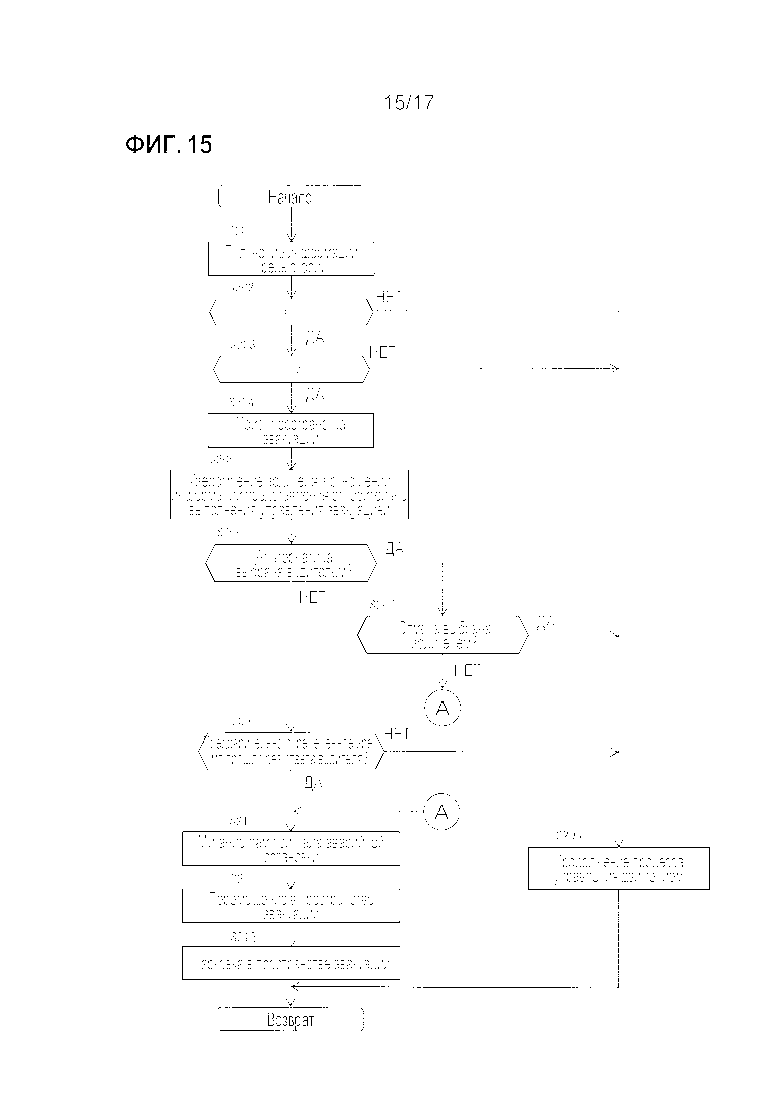
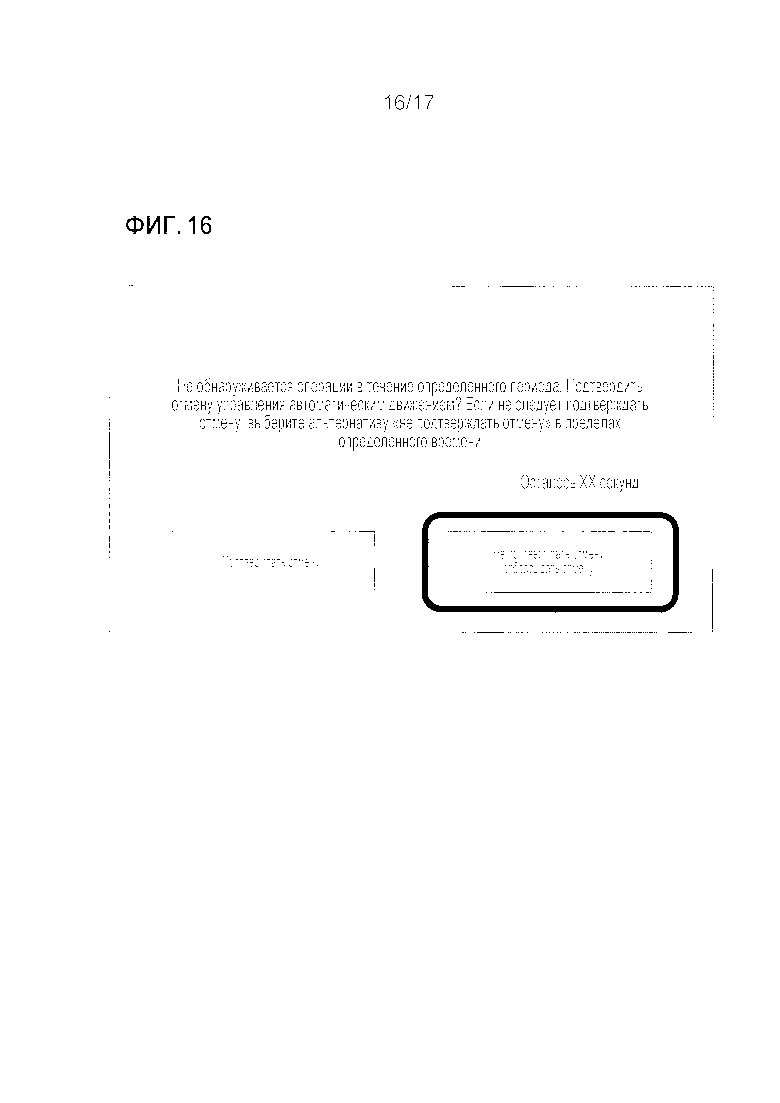
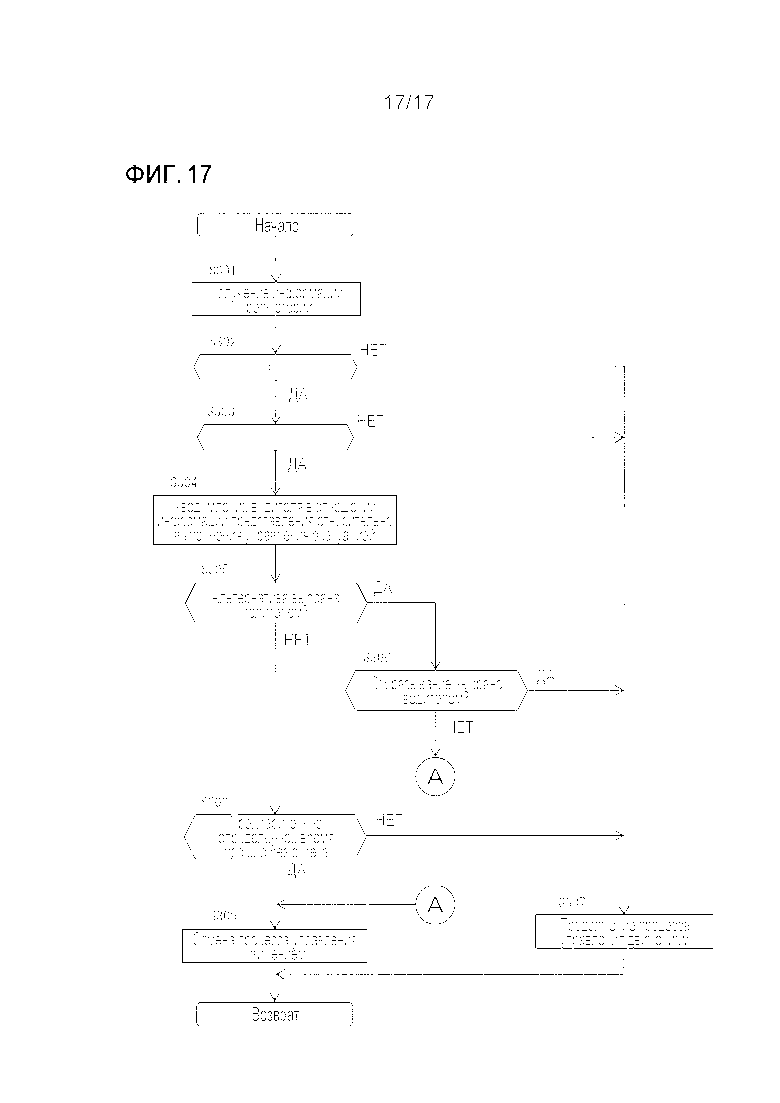
Изобретение относится к автомобилестроению, в частности к устройствам управления движением транспортного средства. Устройство управления движением, установленное на транспортном средстве, включает в себя модуль обнаружения, модуль определения, модуль хранения, модуль представления, модуль ввода для пользователя, модуль управления, выполненный с возможностью управлять движением рассматриваемого транспортного средства на основе информации ответа. Причем модуль представления представляет информацию представления пользователю в состоянии, в котором возможный вариант альтернативы выбирается и когда пользователь не выбирает одну из множества альтернатив после того, как информация представления представляется пользователю, модуль управления рассматривает возможный вариант альтернативы в качестве альтернативы, выбранной пользователем. Достигается повышение безопасности водителя транспортного средства при совершении обгона. 4 н. и 14 з.п. ф-лы, 17 ил.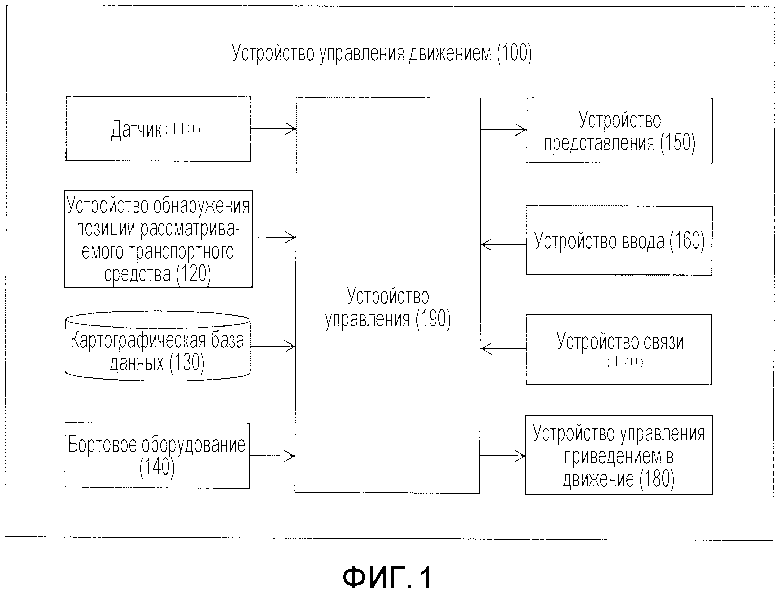
1. Устройство управления движением транспортного средства, содержащее:
- модуль обнаружения, выполненный с возможностью обнаруживать состояние движения рассматриваемого транспортного средства;
- модуль определения, выполненный с возможностью определять окружение движения рассматриваемого транспортного средства на основе состояния движения рассматриваемого транспортного средства;
- модуль хранения, выполненный с возможностью сохранять информацию представления, которая должна представляться пользователю в каждом окружении движения;
- модуль представления, выполненный с возможностью представлять информацию представления, соответствующую окружению движения, пользователю;
- модуль ввода для пользователя, чтобы вводить информацию ответа в ответ на информацию представления; и
- модуль управления, выполненный с возможностью управлять движением рассматриваемого транспортного средства на основе информации ответа, вводимой через модуль ввода, при этом:
- когда управление, которое должно выполняться, которое соответствует окружению движения, подпадает под множество видов управления, модуль представления представляет информацию представления окружения движения, соответствующего управлению приоритетами, пользователю.
2. Устройство управления движением транспортного средства по п. 1, в котором модуль управления определяет информацию представления окружения движения, соответствующего управлению приоритетами, на основе любого из состояния движения рассматриваемого транспортного средства, состояния вождения водителя, состояния дороги, по которой движется рассматриваемое транспортное средство, и окружающей обстановки рядом с рассматриваемым транспортным средством.
3. Устройство управления движением транспортного средства, содержащее:
- модуль обнаружения, выполненный с возможностью обнаруживать состояние движения рассматриваемого транспортного средства;
- модуль определения, выполненный с возможностью определять окружение движения рассматриваемого транспортного средства на основе состояния движения рассматриваемого транспортного средства;
- модуль хранения, выполненный с возможностью сохранять информацию представления в каждом окружении движения, причем информация представления включает в себя множество альтернатив;
- модуль представления, выполненный с возможностью представлять информацию представления пользователю;
- модуль ввода для пользователя, чтобы выбирать одну из множества альтернатив; и
- модуль управления, выполненный с возможностью управлять движением рассматриваемого транспортного средства на основе альтернативы, выбранной пользователем, при этом:
- модуль управления определяет одну из множества альтернатив в качестве возможного варианта альтернативы на основе состояния движения рассматриваемого транспортного средства,
- модуль представления представляет информацию представления пользователю в состоянии, в котором возможный вариант альтернативы выбирается, и
- когда пользователь не выбирает одну из множества альтернатив после того, как информация представления представляется пользователю, модуль управления рассматривает возможный вариант альтернативы в качестве альтернативы, выбранной пользователем, и управляет движением рассматриваемого транспортного средства на основе возможного варианта альтернативы.
4. Устройство управления движением транспортного средства по п. 3, в котором, когда рассматриваемое транспортное средство удовлетворяет предварительно определенному условию инициирования управления, заданному для каждого окружения движения до того, как пользователь выбирает одну из множества альтернатив после того, как модуль представления представляет информацию представления пользователю, модуль управления управляет движением рассматриваемого транспортного средства на основе возможного варианта альтернативы.
5. Устройство управления движением транспортного средства по п. 3 или 4, в котором:
- модуль хранения сохраняет информацию представления, которая включает в себя альтернативу следования за движущимся впереди транспортным средством и альтернативу обгона движущегося впереди транспортного средства, в качестве информации представления, соответствующей окружению настигания движущегося впереди транспортного средства, и
- когда фактическое окружение движения рассматриваемого транспортного средства представляет собой окружение настигания движущегося впереди транспортного средства, модуль управления определяет возможный вариант альтернативы из альтернативы следования за движущимся впереди транспортным средством и альтернативы обгона движущегося впереди транспортного средства на основе состояния движения рассматриваемого транспортного средства.
6. Устройство управления движением транспортного средства по п. 3, в котором:
- модуль хранения сохраняет информацию представления, которая включает в себя множество альтернатив, соответствующих надлежащим будкам пункта взимания платы за проезд, в качестве информации представления, соответствующей окружению приближения к пункту взимания платы за проезд, и
- когда фактическое окружение движения рассматриваемого транспортного средства представляет собой окружение приближения к пункту взимания платы за проезд, модуль управления определяет возможный вариант альтернативы из множества альтернатив, соответствующих надлежащим будкам пункта взимания платы за проезд на основе состояния движения рассматриваемого транспортного средства.
7. Устройство управления движением транспортного средства по п. 3, в котором:
- модуль хранения сохраняет информацию представления, которая включает в себя альтернативу движения по прямой вперед и альтернативу смены полосы движения, в качестве информации представления, соответствующей окружению приближения к точке слияния, и
- когда фактическое окружение движения рассматриваемого транспортного средства представляет собой окружение приближения к точке слияния, модуль управления определяет возможный вариант альтернативы из альтернативы движения по прямой вперед и альтернативы смены полосы движения на основе состояния движения рассматриваемого транспортного средства.
8. Устройство управления движением транспортного средства, содержащее:
- модуль обнаружения, выполненный с возможностью обнаруживать состояние движения рассматриваемого транспортного средства;
- модуль определения, выполненный с возможностью определять окружение движения рассматриваемого транспортного средства на основе состояния движения рассматриваемого транспортного средства;
- модуль хранения, выполненный с возможностью сохранять информацию представления, представляющую режим движения, который может выполнять рассматриваемое транспортное средство;
- модуль хранения, выполненный с возможностью сохранять информацию представления для каждого вида управления, которое должно выполняться, которое соответствует окружению движения, причем информация представления представляет режим движения, который может выполнять рассматриваемое транспортное средство;
- модуль представления, сконфигурированный для множества элементов информации представления в качестве альтернатив, когда управление, которое должно выполняться, которое соответствует окружению движения, подпадает под множество видов управления,
- модуль ввода для пользователя, чтобы выбирать одну из множества альтернатив; и
- модуль управления, выполненный с возможностью управлять движением рассматриваемого транспортного средства на основе альтернативы, выбранной пользователем, при этом:
- модуль представления представляет первую альтернативу в первом режиме представления и представляет вторую альтернативу во втором режиме представления, отличающемся от первого режима представления, на основе состояния движения рассматриваемого транспортного средства, первая альтернатива является частью множества альтернатив, включенных в информацию представления, и вторая альтернатива отличается от первой альтернативы из множества альтернатив.
9. Устройство управления движением транспортного средства по п. 8, в котором:
- модуль хранения сохраняет множество элементов информации представления, которая включает в себя альтернативу следования за движущимся впереди транспортным средством и альтернативу обгона движущегося впереди транспортного средства, в качестве информации представления управления, которое должно выполняться, которое соответствует окружению настигания движущегося впереди транспортного средства, и
- когда фактическое окружение движения рассматриваемого транспортного средства представляет собой окружение настигания движущегося впереди транспортного средства, модуль представления представляет альтернативу следования за движущимся впереди транспортным средством в одном из первого режима представления и второго режима представления и представляет альтернативу обгона движущегося впереди транспортного средства в другом из первого режима представления и второго режима представления, на основе состояния движения рассматриваемого транспортного средства.
10. Устройство управления движением транспортного средства по п. 8 или 9, в котором:
- модуль хранения сохраняет множество элементов информации представления, которая включает в себя множество альтернатив, соответствующих надлежащим будкам пункта взимания платы за проезд, в качестве информации представления управления, которое должно выполняться, которое соответствует окружению приближения к пункту взимания платы за проезд, и
- когда фактическое окружение движения рассматриваемого транспортного средства представляет собой окружение приближения к пункту взимания платы за проезд, модуль представления представляет альтернативу, соответствующую части будок, из множества альтернатив, соответствующих надлежащим будкам, в одном из первого режима представления и второго режима представления, и представляет альтернативу, отличающуюся от альтернативы, соответствующей части будок, в другом из первого режима представления и второго режима представления, на основе состояния движения рассматриваемого транспортного средства.
11. Устройство управления движением транспортного средства по п. 8, в котором:
- модуль хранения сохраняет множество элементов информации представления, которая включает в себя альтернативу движения по прямой вперед и альтернативу смены полосы движения, в качестве информации представления управления, которое должно выполняться, которое соответствует окружению приближения к точке слияния, и
- когда фактическое окружение движения рассматриваемого транспортного средства представляет собой окружение приближения к точке слияния, модуль представления представляет альтернативу движения по прямой вперед в одном из первого режима представления и второго режима представления и представляет альтернативу смены полосы движения в другом из первого режима представления и второго режима представления, на основе состояния движения рассматриваемого транспортного средства.
12. Устройство управления движением транспортного средства по п. 1, в котором:
- модуль хранения сохраняет условие представления информации представления управления, которое должно выполняться, которое соответствует окружению движения, в ассоциации с окружением движения, и
- модуль представления представляет информацию представления пользователю, когда рассматриваемое транспортное средство удовлетворяет условию представления.
13. Устройство управления движением транспортного средства по п. 12, в котором модуль управления изменяет условие представления информации представления на основе состояния движения рассматриваемого транспортного средства.
14. Устройство управления движением транспортного средства, содержащее:
- модуль обнаружения, выполненный с возможностью обнаруживать состояние движения рассматриваемого транспортного средства;
- модуль определения, выполненный с возможностью определять окружение движения рассматриваемого транспортного средства на основе состояния движения рассматриваемого транспортного средства;
- модуль хранения, выполненный с возможностью сохранять информацию представления, которая должна представляться пользователю в каждом окружении движения;
- модуль представления, выполненный с возможностью представлять информацию представления, соответствующую окружению движения, пользователю;
- модуль ввода для пользователя, чтобы вводить информацию ответа в ответ на информацию представления; и
- модуль управления, выполненный с возможностью управлять автоматическим движением рассматриваемого транспортного средства на основе информации ответа, вводимой через модуль ввода, при этом:
- когда отношение числа вводов информации ответа к числу представлений информации представления не выше предварительно определенного значения, модуль управления выполняет виды управления для того, чтобы отменять автоматическое движение, в качестве конкретного управления.
15. Устройство управления движением транспортного средства по п. 14, дополнительно содержащее:
- модуль получения, выполненный с возможностью получать оперативную информацию, представляющую то, что пользователь выполняет операцию бортового оборудования,
- при этом, когда число операций бортового оборудования в течение предварительно определенного периода времени до настоящего момента не превышает предварительно определенное число на основе оперативной информации, модуль управления выполняет конкретное управление.
16. Устройство управления движением транспортного средства по п. 14, в котором:
- до того как модуль управления выполняет конкретное управление, модуль представления представляет конкретную информацию представления пользователю, при этом конкретная информация представления включает в себя альтернативу для пользователя, чтобы выбирать то, следует или нет выполнять конкретное управление.
17. Устройство управления движением транспортного средства по п. 16, в котором:
- модуль представления определяет альтернативу не выполнения конкретного управления в качестве возможного варианта альтернативы из числа альтернатив, включенных в конкретную информацию представления, и представляет конкретную информацию представления пользователю в состоянии, в котором возможный вариант альтернативы выбирается.
18. Устройство управления движением транспортного средства по п. 14, в котором когда пользователь не выбирает альтернативу, модуль управления выполняет конкретное управление.
| DE 102012002304 A1, 08.08.2013 | |||
| US 2005216168 A1, 29.09.2005 | |||
| US 2008065293 A1, 13.03.2008. |

