Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления движением и к устройству управления движением для управления движением транспортного средства.
Уровень техники
[0002] Известна традиционная технология определения того, движется или нет другое транспортное средство в полосе движения (смежной полосе движения), смежной с полосой движения (полосой движения рассматриваемого транспортного средства), в которой движется рассматриваемое транспортное средство, на основе числа полос движения, включенных в картографическую информацию, и позиции другого транспортного средства, принимаемой из другого транспортного средства (например, патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2013-134567A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, к сожалению, позиция другого транспортного средства не может обнаруживаться с высокой степенью точности в зависимости от датчика, предоставленного в другом транспортном средстве, и другое транспортное средство может фактически двигаться в смежной полосе движения, даже когда выполняется определение в отношении того, что другое транспортное средство не движется в смежной полосе движения.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ управления движением, который позволяет надлежащим образом оценивать позицию движущегося объекта, существующего рядом с рассматриваемым транспортным средством.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему посредством оценки позиции движущегося объекта на основе направления движения в полосе движения дороги, по которой движется движущийся объект, когда рассматриваемое транспортное средство изменяет направление или поворачивает.
Преимущества изобретения
[0007] Согласно настоящему изобретению, позиция движущегося объекта, существующего рядом с рассматриваемым транспортным средством, может надлежащим образом оцениваться.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства управления движением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является видом для описания граничных линий полосы движения.
Фиг. 3 является видом для описания диапазона обнаружения датчика обнаружения окружающих условий.
Фиг. 4 является видом для описания способа совмещения граничных линий полосы движения.
Фиг. 5 является видом, примерно иллюстрирующим окружение, в котором рассматриваемое транспортное средство изменяет направление.
Фиг. 6 является видом для описания направлений движения в полосах движения в окружении, проиллюстрированном на фиг. 5.
Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно первому варианту осуществления.
Фиг. 8 является видом, примерно иллюстрирующим окружение, в котором рассматриваемое транспортное средство въезжает на Т-образный перекресток.
Фиг. 9 является видом для описания направлений движения в полосах движения в окружении, проиллюстрированном на фиг. 8.
Фиг. 10 является видом, примерно иллюстрирующим окружение, в котором рассматриваемое транспортное средство изменяет направление в окружении, проиллюстрированном на фиг. 8.
Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно второму варианту осуществления.
Фиг. 12A является видом, примерно иллюстрирующим окружение, в котором рассматриваемое транспортное средство въезжает на крестообразный перекресток.
Фиг. 12B является видом, иллюстрирующим пример результата обнаружения посредством датчика обнаружения окружающих условий в окружении, проиллюстрированном на фиг. 12A.
Фиг. 13 является видом для описания способа коррекции позиций рассматриваемого транспортного средства и окружающего транспортного средства в окружении, проиллюстрированном на фиг. 12A.
Фиг. 14 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно третьему варианту осуществления.
Оптимальный режим осуществления изобретения
[0009] Далее описываются один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, примерно иллюстрируется и описывается устройство управления движением, оснащенное в транспортном средстве.
[0010] Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 100 управления движением согласно настоящему варианту осуществления. Как проиллюстрировано на фиг. 1, устройство 100 управления движением согласно настоящему варианту осуществления включает в себя датчик 110 обнаружения окружающих условий, устройство 120 обнаружения позиции рассматриваемого транспортного средства, картографическую базу 130 данных, устройство 140 представления, устройство 150 управления приведением в движение и устройство 160 управления. Эти устройства соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0011] Датчик 110 обнаружения окружающих условий обнаруживает помехи (к примеру, другие транспортные средства) и дорожные метки (к примеру, разделительные линии и бордюрные камни), существующие рядом с рассматриваемым транспортным средством. Примеры датчика 110 обнаружения окружающих условий включают в себя камеру переднего вида, которая захватывает изображения впереди рассматриваемого транспортного средства, камеру заднего вида, которая захватывает изображения позади рассматриваемого транспортного средства, и боковые камеры, которые захватывают изображения по бокам от рассматриваемого транспортного средства. Лазерный дальномер (LRF), который обнаруживает помехи рядом с рассматриваемым транспортным средством, также может использоваться в качестве датчика 110 обнаружения окружающих условий. Датчик 110 обнаружения окружающих условий может быть сконфигурирован с использованием одного датчика из вышеописанных датчиков или также может быть сконфигурирован с использованием комбинации двух или более датчиков. Результаты обнаружения посредством датчика 110 обнаружения окружающих условий выводятся в устройство 160 управления.
[0012] Устройство 120 обнаружения позиции рассматриваемого транспортного средства состоит из GPS-модуля, гиродатчика, датчика скорости транспортного средства и других необходимых компонентов. Устройство 120 обнаружения позиции рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые из множества спутников связи с использованием GPS-модуля, чтобы периодически получать позиционную информацию целевого транспортного средства (рассматриваемого транспортного средства), и обнаруживает текущую позицию целевого транспортного средства на основе полученной позиционной информации целевого транспортного средства, информации варьирования угла, полученной из гиродатчика, и скорости транспортного средства, полученной из датчика скорости транспортного средства. Позиционная информация целевого транспортного средства, обнаруженная посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, выводится в устройство 160 управления.
[0013] Картографическая база 130 данных сохраняет картографическую информацию, которая включает в себя информацию дороги. Информация дороги включает в себя информацию относительно числа полос движения каждой дороги, граничных линий полосы движения, которые задают полосы движения, и направлений движения в полосах движения. Примеры направлений движения в полосах движения включают в себя направления "движения по прямой вперед", "поворота направо", "поворота налево", "движения по прямой вперед и поворота направо", и "движения по прямой вперед и поворота налево". В настоящем варианте осуществления, картографическая база 130 данных сохраняет информацию относительно узлов и соединений, соответствующих полосам движения, из которой может восприниматься число полос движения и направления движения в полосах движения (подробности описываются ниже).
[0014] Устройство 140 представления, например, может представлять собой такое устройство, как дисплей навигационного устройства, дисплей, включенный в зеркало заднего вида, дисплей, включенный в приборный блок, дисплей на лобовом стекле, проецируемый на ветровое стекло, и динамик аудиоустройства.
[0015] Устройство 150 управления приведением в движение управляет движением рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство едет за едущим впереди транспортным средством, устройство 150 управления приведением в движение управляет работой приводного механизма (которая включает в себя работу двигателя внутреннего сгорания в случае автомобиля с двигателем и работу электромотора в случае электромобиля и дополнительно включает в себя распределение крутящего момента для двигателя внутреннего сгорания и электромотора в случае гибридного автомобиля) и операцией торможения, чтобы достигать ускорения, замедления и скорости транспортного средства таким образом, что расстояние между рассматриваемым транспортным средством и едущим впереди транспортным средством может поддерживаться равным постоянному расстоянию. Когда рассматриваемое транспортное средство сменяет полосу движения или поворачивает направо или налево на перекрестке, устройство 150 управления приведением в движение управляет работой исполнительного устройства рулевого управления, чтобы управлять работой колес, и ввиду этого выполняет управление изменением направления рассматриваемого транспортного средства. Устройство 150 управления приведением в движение управляет движением рассматриваемого транспортного средства в соответствии с командами, отправляемыми из устройства 160 управления, которое описывается ниже. Другие известные способы также могут использоваться в качестве способа управления движением посредством устройства 150 управления приведением в движение.
[0016] Устройство 160 управления состоит из постоянного запоминающего устройства (ROM), которое сохраняет программы для управления движением рассматриваемого транспортного средства, центрального процессора (CPU), который выполняет программы, сохраненные в ROM, и оперативного запоминающего устройства (RAM), которое служит в качестве доступного устройства хранения данных. В качестве замены или в дополнение к CPU, также может использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п. в качестве функциональной схемы.
[0017] Устройство 160 управления выполняет программы, сохраненные в ROM, с использованием CPU, чтобы за счет этого достигать следующих различных функций: функция поиска маршрута для поиска запланированного маршрута движения рассматриваемого транспортного средства; функция обнаружения первых граничных линий для обнаружения граничных линий полосы движения, в которой движется рассматриваемое транспортное средство (полосы движения рассматриваемого транспортного средства) на основе картографической информации; функция обнаружения вторых граничных линий для обнаружения граничных линий полосы движения рассматриваемого транспортного средства на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий; функция совмещения граничных линий для совмещения граничных линий полосы движения, обнаруженных на основе картографической информации, и граничных линий полосы движения, обнаруженных на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий; функция обнаружения окружающих транспортных средств для обнаружения окружающих транспортных средств; функция определения направления движения для определения того, совпадает или нет направление движения в полосе движения с направлением движения окружающего транспортного средства; и функция перебазирования окружающих транспортных средств для оценки полосы движения, в которой движется окружающее транспортное средство, и размещения позиции окружающего транспортного средства в соответствующей полосе движения на карте. Ниже описывается каждая функция устройства 190 управления.
[0018] Устройство 160 управления использует функцию поиска маршрута для того, чтобы формировать запланированный маршрут движения рассматриваемого транспортного средства из текущей позиции и места назначения рассматриваемого транспортного средства. Например, функция поиска маршрута может служить для того, чтобы получать позицию рассматриваемого транспортного средства из устройства 120 обнаружения позиции рассматриваемого транспортного средства и получать место назначения, которое вводит водитель, из устройства ввода (не проиллюстрировано). Функция поиска маршрута также может служить для того, чтобы выполнять поиск запланированного маршрута движения с использованием способа, известного в данной области техники.
[0019] Устройство 160 управления использует функцию обнаружения первых граничных линий для того, чтобы обнаруживать граничные линии полосы движения для полос движения, включающих в себя полосу движения рассматриваемого транспортного средства, на основе картографической информации, сохраненной в картографической базе 130 данных. Граничные линии полосы движения означают линии, которые задают границы между полосами движения и смежными полосами движения или границы между полосами движения и обочинами дороги, к примеру, разделительные линии (сплошные линии, двойные линии, пунктирные линии и другие линии, нарисованные белым, желтым и т.п. на дороге, чтобы задавать полосы движения) и бордюрные камни. Картографическая информация, сохраненная в картографической базе 130 данных, включает в себя информацию относительно граничных линий каждой полосы движения, и функция обнаружения первых граничных линий служит для того, чтобы обращаться к картографической информации, чтобы обнаруживать граничные линии полосы движения для полос движения, включающих в себя полосу движения рассматриваемого транспортного средства, из картографической информации. Как проиллюстрировано на фиг. 2, граничные линии полосы движения, обнаруженные с использованием функции обнаружения первых граничных линий, не ограничены полосами движения рядом с рассматриваемым транспортным средством, и функция обнаружения первых граничных линий также может служить для того, чтобы обнаруживать граничные линии полосы движения для полос движения, например, на запланированном маршруте движения рассматриваемого транспортного средства.
[0020] Устройство 160 управления использует функцию обнаружения вторых граничных линий для того, чтобы обнаруживать граничные линии полосы движения для полос движения рядом с рассматриваемым транспортным средством на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий. Например, функция обнаружения вторых граничных линий может служить для того, чтобы обнаруживать граничные линии полосы движения для полос движения рядом с рассматриваемым транспортным средством через захват изображений разделительных линий и бордюрных камней, существующих рядом с рассматриваемым транспортным средством, с использованием камеры переднего вида, боковых камер или камеры заднего вида и анализ захваченных изображений. Помимо этого или альтернативно, функция обнаружения вторых граничных линий может служить для того, чтобы обнаруживать граничные линии полосы движения для полос движения рядом с рассматриваемым транспортным средством через обнаружение яркости поверхности дороги и разделительных линий рядом с рассматриваемым транспортным средством с использованием лазерного дальномера или обнаружения выступов бордюрных камней посредством измерения расстояния.
[0021] На общих дорогах, которые включают в себя множество кривых и перекрестков, затруднительно оценивать направления, в которых существуют разделительные линии и бордюрные камни, и ограничено разрешение камер. Диапазон, в котором камеры могут обнаруживать разделительные линии и бордюрные камни с высокой степенью точности, ввиду этого представляет собой диапазон приблизительно в несколько десятков метров от камер. Лазерный дальномер также может использоваться для того, чтобы идентифицировать разделительные линии и бордюрные камни. Тем не менее, в этом случае лазерный дальномер должен устанавливаться вниз, чтобы обнаруживать яркость разделительных линий, нарисованных на поверхности дороги, и обнаруживать небольшие выступы бордюрных камней. Соответственно, также в случае использования лазерного дальномера, диапазон, в котором лазерный дальномер может обнаруживать разделительные линии и бордюрные камни с высокой степенью точности, представляет собой диапазон приблизительно в несколько десятков метров от лазерного дальномера. Таким образом, как проиллюстрировано на фиг. 2, диапазон, в котором функция обнаружения вторых граничных линий может служить для того, чтобы обнаруживать граничные линии полосы движения, представляет собой диапазон приблизительно в несколько десятков метров от рассматриваемого транспортного средства, т.е. диапазон рядом с рассматриваемым транспортным средством.
[0022] Устройство 160 управления использует функцию совмещения граничных линий для того, чтобы совмещать граничные линии полосы движения, обнаруженные с использованием функции обнаружения первых граничных линий, и граничные линии полосы движения, обнаруженные с использованием функции обнаружения вторых граничных линий для того, чтобы формировать граничные линии полосы движения для полос движения, включающих в себя полосу движения, в которой движется рассматриваемое транспортное средство. Здесь, как проиллюстрировано на фиг. 3, диапазон, в котором функция обнаружения вторых граничных линий может служить для того, чтобы обнаруживать граничные линии полосы движения с высокой степенью точности, представляет собой диапазон рядом с рассматриваемым транспортным средством, и по мере того, как увеличивается расстояние от рассматриваемого транспортного средства, точность при обнаружении граничных линий полосы движения понижается. Следовательно, в настоящем варианте осуществления, область за пределами диапазона, в которой функция обнаружения вторых граничных линий может служить для того, чтобы обнаруживать граничные линии полосы движения, дополняется граничными линиями полосы движения, обнаруженными посредством функции обнаружения первых граничных линий.
[0023] Тем не менее, к сожалению, ошибка обнаружения позиции рассматриваемого транспортного средства вследствие устройства 120 обнаружения позиции рассматриваемого транспортного средства может вызывать ошибку, как проиллюстрировано на фиг 2, между фактической позицией рассматриваемого транспортного средства (указываемой посредством пунктирных линий на чертеже) и позицией рассматриваемого транспортного средства (указываемой посредством сплошных линий на чертеже) на основе результата обнаружения посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства. В этом случае, как проиллюстрировано на фиг. 3, большие сдвиги возникают между граничными линиями полосы движения вокруг позиции рассматриваемого транспортного средства на карте и граничными линиями полосы движения рядом с рассматриваемым транспортным средством на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий. Ввиду этого, как проиллюстрировано на фиг. 3, граничные линии полосы движения, адаптированные к фактическим граничным линиям полосы движения, не могут формироваться просто посредством совмещения области за пределами диапазона, в которой функция обнаружения вторых граничных линий может служить для того, чтобы обнаруживать граничные линии полосы движения, с граничными линиями полосы движения, обнаруженными с использованием функции обнаружения первых граничных линий.
[0024] Ввиду этого функция совмещения граничных линий служит для того, чтобы дополнять граничные линии полосы движения, обнаруженные посредством датчика 110 обнаружения окружающих условий, граничными линиями полосы движения на основе картографической информации таким образом, что, как проиллюстрировано на фиг. 4, граничные линии полосы движения, обнаруженные посредством датчика 110 обнаружения окружающих условий, совпадают с граничными линиями полосы движения на основе картографической информации. Через эту операцию, как проиллюстрировано на фиг. 4, позиция рассматриваемого транспортного средства на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий может быть расположена в соответствующей позиции на карте. Помимо этого, как проиллюстрировано на фиг. 4, граничные линии полосы движения могут надлежащим образом восприниматься даже в диапазоне за пределами диапазона обнаружения датчика 110 обнаружения окружающих условий.
[0025] Функция совмещения граничных линий служит для того, чтобы совмещать граничную линию полосы движения на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий и граничную линию полосы движения на основе картографической информации, когда степень совпадения между этими граничными линиями полосы движения не меньше предварительно определенного значения. Функция совмещения граничных линий может служить для того, чтобы определять степень совпадения между этими граничными линиями полосы движения, например, посредством схемы на основе итеративного алгоритма ближайших точек (ICP). ICP означает десятеричную систему счисления, используемую для того, чтобы совмещать "облако точек, представляющих граничную линию полосы движения, обнаруженную посредством датчика 110 обнаружения окружающих условий" и "облако точек, представляющих граничную линию полосы движения, которой обладает картографическая информация" на основе метода наименьших квадратов. Когда выполняется определение в отношении того, что степень совпадения между граничными линиями полосы движения не меньше предварительно определенного значения, функция совмещения граничных линий служит для того, чтобы дополнять граничную линию полосы движения на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий граничной линией полосы движения на основе картографической информации.
[0026] С другой стороны, когда степень совпадения между граничными линиями полосы движения меньше предварительно определенного значения, функция совмещения граничных линий служит для того, чтобы оценивать позицию рассматриваемого транспортного средства на карте на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий. Затем функция совмещения граничных линий служит для того, чтобы обнаруживать граничные линии полосы движения для полосы движения, включающие в себя позицию рассматриваемого транспортного средства на карте, из картографической информации и размещать позицию рассматриваемого транспортного средства между граничными линиями полосы движения на основе картографической информации. Таким образом, когда степень совпадения между граничными линиями полосы движения меньше предварительно определенного значения, функция совмещения граничных линий служит для того, чтобы задавать граничные линии полосы движения рядом с рассматриваемым транспортным средством с использованием граничных линий полосы движения на основе картографической информации вместо использования граничных линий полосы движения на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий.
[0027] Устройство 160 управления использует функцию обнаружения окружающих транспортных средств для того, чтобы обнаруживать позицию и скорость транспортного средства для окружающего транспортного средства, существующего рядом с рассматриваемым транспортным средством. В частности, функция обнаружения окружающих транспортных средств может служить для того, чтобы обнаруживать позицию окружающего транспортного средства, существующего рядом с рассматриваемым транспортным средством, на основе изображения, захваченного посредством любой из камеры переднего вида, боковых камер и камеры заднего вида, которые составляют датчик 110 обнаружения окружающих условий, или на основе результата обнаружения посредством лазерного дальномера. Помимо этого или альтернативно, функция обнаружения окружающих транспортных средств может служить для того, чтобы анализировать тип движущегося объекта, например, из информации изображений, захватываемой посредством камер, чтобы за счет этого идентифицировать пешехода, велосипед, автомобиль и т.п. Помимо этого или альтернативно, функция обнаружения окружающих транспортных средств может служить для того, чтобы получать скорость транспортного средства (абсолютную скорость) окружающего транспортного средства на основе величины изменения относительной позиции окружающего транспортного средства относительно позиции рассматриваемого транспортного средства и скорости транспортного средства для рассматриваемого транспортного средства.
[0028] Устройство 160 управления использует функцию определения направления движения, чтобы определять то, совпадает или нет направление движения в полосе движения, в которой движется окружающее транспортное средство, с направлением движения окружающих транспортных средств. В настоящем варианте осуществления, функция определения направления движения служит для того, чтобы определять то, что направление движения в полосе движения совпадает с направлением движения окружающего транспортного средства, когда рассматриваемое транспортное средство движется прямо вперед или останавливается, и определять то, что направление движения в полосе движения не совпадает с направлением движения окружающего транспортного средства, когда рассматриваемое транспортное средство изменяет направление. Фиг. 5 примерно иллюстрирует окружение, в котором рассматриваемое транспортное средство сменяет полосу движения (изменяет направление). Как проиллюстрировано на фиг. 5, когда окружающее транспортное средство обнаруживается в то время, когда рассматриваемое транспортное средство изменяет направление, ошибка может возникать в результате обнаружения окружающего транспортного средства посредством датчика 110 обнаружения окружающих условий, поскольку скорость относительно вертикальной оси формируется вследствие изменения направления рассматриваемого транспортного средства. Например, как проиллюстрировано на фиг. 5, даже в случае, если окружающее транспортное средство фактически движется прямо вперед в полосе A движения, когда рассматриваемое транспортное средство сменяет полосу движения, окружающее транспортное средство может обнаруживаться, как если оно движется в направлении отклонения от полосы A движения. Ввиду этого, когда рассматриваемое транспортное средство изменяет направление, как проиллюстрировано на фиг. 5, функция определения направления движения служит для того, чтобы определять то, что направление движения в полосе движения (направление движения по прямой вперед на фиг. 5) не совпадает с направлением движения окружающего транспортного средства (направлением отклонения от полосы A движения на фиг. 5), поскольку эти направления с большой долей вероятности не совпадают друг с другом.
[0029] Устройство 160 управления использует функцию перебазирования окружающих транспортных средств для того, чтобы оценивать полосу движения, в которой должно двигаться окружающее транспортное средство, на основе результата определения посредством функции определения направления движения и размещает позицию окружающего транспортного средства в позиции в оцененной полосе движения на карте. Например, когда рассматриваемое транспортное средство движется прямо вперед или останавливается, и выполняется определение в отношении того, что направление движения в полосе движения совпадает с направлением движения движущегося объекта, функция перебазирования окружающих транспортных средств служит для того, чтобы оценивать то, что позиция окружающего транспортного средства, обнаруженная посредством датчика 110 обнаружения окружающих условий, представляет полосу движения, в которой движется окружающее транспортное средство, и размещать позицию окружающего транспортного средства в оцененной позиции окружающего транспортного средства на карте. Это обусловлено тем, что, когда рассматриваемое транспортное средство движется прямо вперед или останавливается, ошибка обнаружения в позиции окружающего транспортного средства вследствие формирования скорости относительно вертикальной оси рассматриваемого транспортного средства является небольшой, и надежность результата обнаружения посредством датчика 110 обнаружения окружающих условий является высокой.
[0030] С другой стороны, когда рассматриваемое транспортное средство изменяет направление, как проиллюстрировано на фиг. 5, и выполняется определение в отношении того, что направление движения в полосе движения не совпадает с направлением движения движущегося объекта, функция перебазирования окружающих транспортных средств служит для того, чтобы оценивать позицию, полученную посредством перемещения окружающего транспортного средства в направлении движения в полосе движения, в которой движется окружающее транспортное средство, в качестве позиции окружающего транспортного средства. Например, в примере, проиллюстрированном на фиг. 5, направление движения в полосе A движения, в которой движется окружающее транспортное средство, представляет собой направление движения по прямой вперед, и ввиду этого функция перебазирования окружающих транспортных средств служит для того, чтобы оценивать позицию, полученную посредством перемещения окружающего транспортного средства в направлении движения по прямой вперед в полосе A движения, в качестве позиции окружающего транспортного средства. Затем функция перебазирования окружающих транспортных средств служит для того, чтобы размещать позицию окружающего транспортного средства в позиции на карте, соответствующей оцененной позиции окружающего транспортного средства, чтобы за счет этого перебазировать позицию окружающего транспортного средства в полосе A движения. Через эту операцию, полоса движения, в которой движется окружающее транспортное средство, может надлежащим образом восприниматься.
[0031] В частности, функция перебазирования окружающих транспортных средств в первую очередь служит для того, чтобы обнаруживать направление движения в полосе движения, в которой движется окружающее транспортное средство, из картографической информации, сохраненной в картографической базе 130 данных. В настоящем варианте осуществления, как проиллюстрировано на фиг. 6, картографическая информация включает в себя информацию соединений, соответствующую каждой полосе движения. В примере, проиллюстрированном на фиг. 6, соединения полос A-C движения, в которых движутся окружающие транспортные средства A-C, идут в направлениях движения по прямой вперед. Ввиду этого функция перебазирования окружающих транспортных средств может оценивать то, что направления движения в полосах A-C движения представляют собой направления движения по прямой вперед. Как следует понимать из чертежа, соединение полосы F движения, в которой движется рассматриваемое транспортное средство, соединяется с соединением полосы A движения через узел полосы F движения и узел полосы A движения, а также соединяется с соединением полосы E движения через узел полосы F движения и узел полосы E движения. В этом случае, функция перебазирования окружающих транспортных средств может служить для того, чтобы оценивать направления движения в полосе F движения, в которой движется рассматриваемое транспортное средство, в качестве направлений "движения по прямой вперед" и "поворота налево". Затем функция перебазирования окружающих транспортных средств служит для того, чтобы оценивать оцененное направление движения в полосе движения в качестве направления движения окружающего транспортного средства. Это обусловлено тем, что окружающее транспортное средство с большой долей вероятности движется без изменения направления в полосе движения, в которой движется окружающее транспортное средство. Через эту операцию, в примере, проиллюстрированном на фиг. 5, например, функция перебазирования окружающих транспортных средств может определять то, что окружающее транспортное средство движется в направлении движения в полосе движения (в направлении движения по прямой вперед), в котором движется окружающее транспортное средство, и размещать позицию окружающего транспортного средства в направлении движения по прямой вперед в полосе A движения.
[0032] Помимо этого или альтернативно, функция перебазирования окружающих транспортных средств может служить для того, чтобы оценивать полосу движения, в которой движется окружающее транспортное средство, и величину перемещения окружающего транспортного средства на основе предыстории позиций окружающего транспортного средства до того, как рассматриваемое транспортное средство изменяет направление. Затем функция перебазирования окружающих транспортных средств служит для того, чтобы размещать позицию окружающего транспортного средства в позиции, полученной посредством перемещения окружающего транспортного средства из ранее оцененной позиции окружающего транспортного средства на величину перемещения окружающего транспортного средства в направлении движения в полосе движения, в которой движется окружающее транспортное средство. Через эту операцию, как проиллюстрировано на фиг. 5, позиция окружающего транспортного средства (указываемая посредством пунктирных линий на фиг. 5) на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий может надлежащим образом корректироваться на позицию (указываемую посредством сплошных линий на фиг. 5) в полосе движения, в которой фактически движется окружающее транспортное средство.
[0033] Далее описывается процесс управления движением согласно первому варианту осуществления со ссылкой на фиг. 7. Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно первому варианту осуществления. Процесс управления движением, описанный ниже, выполняется посредством устройства 160 управления.
[0034] На этапе S101, функция поиска маршрута служит для того, чтобы обнаруживать текущую позицию рассматриваемого транспортного средства. На этапе S102, функция поиска маршрута служит для того, чтобы определять то, следует или нет выполнять поиск запланированного маршрута движения. Например, когда текущая позиция рассматриваемого транспортного средства, полученная на этапе S101, не присутствует на запланированном маршруте движения, который предварительно задается, функция поиска маршрута служит для того, чтобы определять выполнять поиск запланированного маршрута движения, и процедура переходит к этапу S103. С другой стороны, когда текущая позиция рассматриваемого транспортного средства присутствует на запланированном маршруте движения, который предварительно задается, процедура переходит к этапу S104 без выполнения процесса этапа S103. Помимо этого или альтернативно, когда полоса движения, в которой движется рассматриваемое транспортное средство, указывается, функция поиска маршрута может служить для того, чтобы определять то, движется или нет рассматриваемое транспортное средство в полосе движения, которая обеспечивает возможность рассматриваемому транспортному средству двигаться по запланированному маршруту движения. Когда рассматриваемое транспортное средство не движется в полосе движения, которая обеспечивает возможность рассматриваемому транспортному средству двигаться по запланированному маршруту движения, функция поиска маршрута может служить для того, чтобы определять изменение запланированного маршрута движения.
[0035] На этапе S103, функция поиска маршрута служит для того, чтобы выполнять поиск запланированного маршрута движения из текущей позиции рассматриваемого транспортного средства в место назначения на основе позиционной информации рассматриваемого транспортного средства, полученной на этапе S101. Функция поиска маршрута может выполнять поиск запланированного маршрута движения не только на основе дороги, по которой движется рассматриваемое транспортное средство, но также и на основе полосы движения, в которой движется рассматриваемое транспортное средство. Например, функция поиска маршрута может служить для того, чтобы определять запланированный маршрут движения рассматриваемого транспортного средства на уровне полосы движения посредством схемы с использованием алгоритма поиска по графу, такого как алгоритм Дейкстры и алгоритм A*-поиска. В настоящем варианте осуществления, картографическая база 130 данных сохраняет картографическую информацию, которая включает в себя, например, информацию относительно соединений и узлов каждой полосы движения. Соединения предварительно взвешиваются в соответствии с проезжаемым расстоянием, дорожной ситуацией и т.д. каждой полосы движения (например, взвешивание соединений увеличивается по мере того, как увеличивается расстояние или ухудшается дорожная ситуация). Функция поиска маршрута дополнительно служит для того, чтобы указывать полосу движения, которая является подходящей для маршрута движения в место назначения, и корректировать взвешивание соединений указанной полосы движения. Например, когда правый поворот требуется для того, чтобы прибывать к месту назначения, взвешивание соединений полосы движения для правого поворота может корректироваться на уменьшение. Функция поиска маршрута может служить для того, чтобы выполнять поиск запланированного маршрута движения, который представляет собой маршрут на уровне полосы движения, на котором общая сумма взвешивания соединений является минимальной в полосе движения, из текущей позиции рассматриваемого транспортного средства в место назначения, с использованием алгоритма поиска по графу, к примеру, алгоритма Дейкстры и алгоритма A*-поиска.
[0036] На этапе S104, функция обнаружения первых граничных линий служит для того, чтобы выполнять обнаружение граничных линий полосы движения на основе картографической информации. В настоящем варианте осуществления, картографическая информация, которая сохраняется в картографической базе 130 данных, включает в себя информацию относительно граничных линий полосы движения каждой полосы движения. Ввиду этого функция обнаружения первых граничных линий может служить для того, чтобы обращаться к картографической информации, сохраненной в картографической базе 130 данных, и за счет этого обнаруживать граничные линии полосы движения для полос движения, включающих в себя полосу движения рассматриваемого транспортного средства, как проиллюстрировано на фиг. 2.
[0037] На этапе S105, функция обнаружения вторых граничных линий служит для того, чтобы выполнять обнаружение граничных линий полосы движения на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий. Как проиллюстрировано на фиг. 3, диапазон, в котором датчик 110 обнаружения окружающих условий может обнаруживать граничные линии полосы движения, представляет собой диапазон определенного расстояния (например, несколько десятков метров) от рассматриваемого транспортного средства, т.е. диапазон рядом с рассматриваемым транспортным средством.
[0038] На этапе S106, функция совмещения граничных линий служит для того, чтобы выполнять определение степени совпадения между граничной линией полосы движения, обнаруженной на этапе S104 на основе картографической информации, и граничной линией полосы движения, обнаруженной на этапе S105 на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий. Когда степень совпадения не меньше предварительно определенного значения, процедура переходит к этапу S107, тогда как когда степень совпадения меньше предварительно определенного значения, процедура переходит к этапу S108. Например, в примере, проиллюстрированном на фиг. 3, небольшие сдвиги возникают между граничными линиями полосы движения на основе картографической информации и граничными линиями полосы движения на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий. Тем не менее, выполняется определение в отношении того, что степень совпадения не меньше предварительно определенного значения посредством соответствующей схемы, такой как ICP-схема, и процедура переходит к этапу S107.
[0039] На этапе S107, функция совмещения граничных линий служит для того, чтобы выполнять процесс дополнения граничных линий полосы движения на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий граничными линиями полосы движения на основе картографической информации. В частности, функция совмещения граничных линий служит для того, чтобы дополнять диапазон за пределами диапазона, в котором датчик 110 обнаружения окружающих условий может обнаруживать граничные линии полосы движения, граничными линиями полосы движения на основе картографической информации. Помимо этого или альтернативно, функция совмещения граничных линий служит для того, чтобы регулировать позиции граничных линий полосы движения на основе картографической информации для совмещения таким образом, что граничные линии полосы движения на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий совпадают с граничными линиями полосы движения на основе картографической информации. Через эту операцию, как проиллюстрировано на фиг. 4, позиция рассматриваемого транспортного средства на карте может надлежащим образом обнаруживаться. Кроме того, как проиллюстрировано на фиг. 4, форма дороги, по которой рассматриваемое транспортное средство должно двигаться с этого времени, позиция рассматриваемого транспортного средства на запланированном маршруте движения и т.п. могут надлежащим образом восприниматься, поскольку граничные линии полосы движения могут надлежащим образом обнаруживаться даже в диапазоне за пределами диапазона, в котором датчик 110 обнаружения окружающих условий может обнаруживать граничные линии полосы движения.
[0040] С другой стороны, когда, на этапе S106, выполняется определение в отношении того, что степень совпадения между граничной линией полосы движения на основе картографической информации и граничной линией полосы движения на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий меньше предварительно определенного значения, процедура переходит к этапу S108. На этапе S108, функция совмещения граничных линий служит для того, чтобы оценивать позицию рассматриваемого транспортного средства на карте на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий. Например, функция совмещения граничных линий может служить для того, чтобы оценивать текущую позицию рассматриваемого транспортного средства на основе запланированного маршрута движения рассматриваемого транспортного средства, поиск которого выполняется на этапе S103, и скорости рассматриваемого транспортного средства.
[0041] Затем на этапе S109, функция совмещения граничных линий служит для того, чтобы обнаруживать граничные линии полосы движения для полосы движения, которая включает в себя оцененную позицию рассматриваемого транспортного средства на карте, из картографической информации. Через эту операцию, полоса движения, в которой движется рассматриваемое транспортное средство, и позиция рассматриваемого транспортного средства на запланированном маршруте движения могут надлежащим образом восприниматься из граничных линий полосы движения для полосы движения, которая включает в себя позицию рассматриваемого транспортного средства на карте.
[0042] На этапах S110-S114, процесс выполняется для того, чтобы размещать позицию окружающего транспортного средства в полосе движения, обнаруженной на этапе S107 или этапе S109. Во-первых, на этапе S110, функция обнаружения окружающих транспортных средств служит для того, чтобы обнаруживать позицию и скорость транспортного средства для окружающего транспортного средства. Функция обнаружения окружающих транспортных средств также служит для того, чтобы обнаруживать величину перемещения окружающего транспортного средства со времени предыдущего процесса на основе позиции окружающего транспортного средства во время предыдущего процесса и позиции и скорости транспортного средства для окружающего транспортного средства, которые обнаруживаются в текущий момент времени.
[0043] На этапе S111, функция определения направления движения служит для того, чтобы определять то, изменяет или нет рассматриваемое транспортное средство направление. Когда рассматриваемое транспортное средство изменяет направление, к примеру, при смене полосы движения, функция определения направления движения служит для того, чтобы определять то, что направление движения окружающего транспортного средства не совпадает с направлением движения в полосе движения, и процедура переходит к этапу S112. С другой стороны, когда рассматриваемое транспортное средство движется прямо вперед или останавливается, функция определения направления движения служит для того, чтобы определять то, что направление движения окружающего транспортного средства совпадает с направлением движения в полосе движения, и процедура переходит к этапу S114. Таким образом, в настоящем варианте осуществления, то, изменяет или нет рассматриваемое транспортное средство направление, определяется таким способом, чтобы выполнять определение в отношении того, конфликтует или нет направление движения окружающего транспортного средства с направлением движения в полосе движения. Когда направление движения окружающего транспортного средства не совпадает с направлением движения в полосе движения, т.е. когда направление движения окружающего транспортного средства конфликтует с направлением движения в полосе движения, выполняется определение в отношении того, что ошибка возникает в позиции окружающего транспортного средства, обнаруженной посредством датчика 110 обнаружения окружающих условий, и процедура переходит к этапу S112, чтобы корректировать позицию окружающего транспортного средства.
[0044] На этапе S112, функция перебазирования окружающих транспортных средств служит для того, чтобы оценивать направление движения окружающего транспортного средства. Например, функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать направление движения в полосе движения, в которой движется окружающее транспортное средство, на основе информации соединений, включенной в информацию дороги, и оценивать обнаруженное направление движения в полосе движения в качестве направления движения окружающего транспортного средства. В примере, проиллюстрированном на фиг. 5, например, окружающее транспортное средство движется в полосе A движения, и направление движения в полосе A движения представляет собой направление движения по прямой вперед, и ввиду этого функция перебазирования окружающих транспортных средств может служить для того, чтобы оценивать направление движения по прямой вперед в полосе A движения в качестве направления движения окружающего транспортного средства.
[0045] На этапе S113, функция перебазирования окружающих транспортных средств служит для того, чтобы выполнять процесс размещения позиции окружающего транспортного средства на карте на основе направления движения окружающего транспортного средства, оцененного на этапе S112. В частности, функция перебазирования окружающих транспортных средств служит для того, чтобы оценивать позицию, полученную посредством перемещения окружающего транспортного средства в направлении движения окружающего транспортного средства из позиции окружающего транспортного средства во время предыдущего процесса на величину перемещения из предыдущего процесса, в качестве позиции окружающего транспортного средства. Затем функция перебазирования окружающих транспортных средств служит для того, чтобы размещать позицию окружающего транспортного средства в позиции на карте, соответствующей оцененной позиции окружающего транспортного средства.
[0046] С другой стороны, когда, на этапе S111, функция перебазирования окружающих транспортных средств служит для того, чтобы определять то, что рассматриваемое транспортное средство движется прямо вперед или останавливается, и направление движения в полосе движения совпадает с направлением движения движущегося объекта, процедура переходит к этапу S114. На этапе S114, функция перебазирования окружающих транспортных средств служит для того, чтобы выполнять процесс размещения позиции окружающего транспортного средства в позиции окружающего транспортного средства на карте, обнаруженной на этапе S110. Таким образом, функция перебазирования окружающих транспортных средств служит для того, чтобы оценивать позицию окружающего транспортного средства, обнаруженную посредством датчика 110 обнаружения окружающих условий, в качестве позиции окружающего транспортного средства и размещать позицию окружающего транспортного средства в позиции на карте, соответствующей оцененной позиции окружающего транспортного средства (т.е. в позиции окружающего транспортного средства, обнаруженной посредством датчика 110 обнаружения окружающих условий).
[0047] Как описано выше, в первом варианте осуществления, когда рассматриваемое транспортное средство изменяет направление, выполняется определение в отношении того, что направление движения в полосе движения, в которой движется окружающее транспортное средство, не совпадает с направлением движения окружающего транспортного средства, и позиция, полученная посредством перемещения окружающего транспортного средства в направлении движения в полосе движения, в которой движется окружающее транспортное средство, оценивается в качестве позиции окружающего транспортного средства. Через эту операцию, полоса движения, в которой фактически движется окружающее транспортное средство, может оцениваться, даже когда изменение направления рассматриваемого транспортного средства вызывает ошибку обнаружения в позиции окружающего транспортного средства, обнаруженной посредством датчика 110 обнаружения окружающих условий, и как проиллюстрировано на фиг. 5, окружающее транспортное средство ошибочно обнаруживается в полосе движения, отличающейся от полосы движения, в которой движется окружающее транспортное средство.
[0048] Кроме того, в первом варианте осуществления, величина перемещения окружающего транспортного средства оценивается на основе предыстории позиций окружающего транспортного средства, и позиция, полученная посредством перемещения окружающего транспортного средства в направлении движения окружающего транспортного средства из ранее оцененной позиции окружающего транспортного средства на величину перемещения окружающего транспортного средства, оценивается в качестве позиции окружающего транспортного средства. Через эту операцию, не только позиция окружающего транспортного средства на уровне полосы движения, но также и позиция окружающего транспортного средства в его направлении движения могут надлежащим образом оцениваться.
[0049] Кроме того, в первом варианте осуществления, граничные линии полосы движения для полосы движения, которая включает в себя полосу движения рассматриваемого транспортного средства, формируются на карте на основе граничных линий полосы движения на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий и граничных линий полосы движения на основе картографической информации. В частности, когда степень совпадения между граничной линией полосы движения рядом с рассматриваемым транспортным средством на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий и граничной линией полосы движения рядом с рассматриваемым транспортным средством на основе картографической информации не меньше предварительно определенного значения, граничная линия полосы движения рядом с рассматриваемым транспортным средством на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий дополняется граничной линией полосы движения для полосы движения, которая включает в себя полосу движения рассматриваемого транспортного средства и основана на картографической информации. Таким образом, диапазон за пределами диапазона, в котором датчик 110 обнаружения окружающих условий может обнаруживать граничные линии полосы движения, дополняется граничными линиями полосы движения на основе картографической информации, поскольку диапазон, в котором датчик 110 обнаружения окружающих условий может обнаруживать граничные линии полосы движения, меньше диапазона граничных линий полосы движения на основе картографической информации. Через эту операцию, как проиллюстрировано на фиг. 4, граничные линии полосы движения могут надлежащим образом обнаруживаться даже в области за пределами диапазона, в котором датчик 110 обнаружения окружающих условий может обнаруживать граничные линии полосы движения, и ввиду этого можно надлежащим образом воспринимать форму дороги, по которой рассматриваемое транспортное средство должно двигаться с этого времени, позицию рассматриваемого транспортного средства на запланированном маршруте движения и т.п. Кроме того, даже когда ошибка обнаружения возникает в позиции рассматриваемого транспортного средства, обнаруженной посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, полоса движения, в которой движется рассматриваемое транспортное средство, может надлежащим образом оцениваться, как проиллюстрировано на фиг. 4, и позиция рассматриваемого транспортного средства может размещаться в соответствующей полосе движения на карте.
[0050] Помимо этого, в первом варианте осуществления, когда степень совпадения между граничной линией полосы движения для полосы движения рассматриваемого транспортного средства на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий и граничной линией полосы движения для полосы движения рассматриваемого транспортного средства на основе картографической информации меньше предварительно определенного значения, позиция рассматриваемого транспортного средства на карте оценивается на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий, и граничная линия полосы движения для полосы движения, которая включает в себя оцененную позицию рассматриваемого транспортного средства на карте, дополняется граничной линией полосы движения, обнаруженной из картографической информации. Через эту операцию, даже когда степень совпадения между граничной линией полосы движения для полосы движения рассматриваемого транспортного средства на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий и граничной линией полосы движения для полосы движения рассматриваемого транспортного средства на основе картографической информации меньше предварительно определенного значения, т.е. даже когда граничная линия полосы движения для полосы движения рассматриваемого транспортного средства на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий не может совмещаться с граничной линией полосы движения для полосы движения рассматриваемого транспортного средства на основе картографической информации, граничные линии полосы движения для полос движения рядом с рассматриваемым транспортным средством могут надлежащим образом обнаруживаться.
[0051] Второй вариант осуществления
Далее описывается устройство 100 управления движением согласно второму варианту осуществления настоящего изобретения. Устройство 100 управления движением имеет конфигурацию, идентичную конфигурации в первом варианте осуществления, за исключением того, что оно работает следующим образом.
[0052] Устройство 160 управления согласно второму варианту осуществления использует функцию перебазирования окружающих транспортных средств для того, чтобы оценивать полосу движения, в которой движется окружающее транспортное средство, на основе направления движения в каждой полосе движения дороги, по которой движется окружающее транспортное средство, и состояния подсвечивания указателя поворота окружающего транспортного средства, и размещать позицию окружающего транспортного средства в оцененной полосе движения.
[0053] Фиг. 8 является видом, примерно иллюстрирующим окружение, в котором рассматриваемое транспортное средство въезжает на Т-образный перекресток. В примере, проиллюстрированном на фиг. 8, окружающее транспортное средство A фактически движется в полосе A движения, но окружающее транспортное средство A обнаруживается между полосой A движения и другой полосой B движения вследствие ошибки обнаружения датчика 110 обнаружения окружающих условий. Помимо этого, другое окружающее транспортное средство B фактически движется в полосе E движения, но окружающее транспортное средство B обнаруживается в полосе D движения, в которой движение разрешается в противоположном направлении относительно направления движения окружающего транспортного средства B вследствие ошибки обнаружения датчика 110 обнаружения окружающих условий.
[0054] При размещении позиции окружающего транспортного средства A на карте, функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать направление движения в каждой полосе движения дороги, по которой движется окружающее транспортное средство A. В частности, функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать направление движения в каждой полосе движения дороги, по которой движется окружающее транспортное средство A, на основе информации соединений каждой полосы движения дороги, по которой движется окружающее транспортное средство A. Фиг. 9 является видом, иллюстрирующим пример соединения и узла каждой полосы движения в окружении, проиллюстрированном на фиг. 8. Например, в примере, проиллюстрированном на фиг. 9, соединение полосы A движения соединяется только с соединением полосы C движения в направлении левого поворота через узел полосы A движения и узел полосы C движения. Ввиду этого функция перебазирования окружающих транспортных средств может служить для того, чтобы определять то, что направление движения в полосе A движения представляет собой направление "поворота налево". С другой стороны, соединение полосы B движения соединяется только с соединением полосы D движения в направлении движения по прямой вперед через узел полосы B движения и узел полосы D движения. Ввиду этого функция перебазирования окружающих транспортных средств может служить для того, чтобы определять то, что направление движения в полосе B движения представляет собой направление "движения по прямой вперед".
[0055] Как проиллюстрировано на фиг. 8 и фиг. 9, полоса A движения представляет собой специальную полосу движения для поворота налево, тогда как полоса B движения представляет собой специальную полосу движения для движения по прямой вперед. Ввиду этого функция перебазирования окружающих транспортных средств может служить для того, чтобы определять то, что окружающее транспортное средство существует в зоне запрета смены полосы движения, на основе информации правил дорожного движения, которая запрещает смену полосы движения между специальной полосой движения для поворота налево или специальной полосой движения для поворота направо и специальной полосой движения для движения по прямой вперед около перекрестка. Такая информация правил дорожного движения сохраняется в запоминающем устройстве устройства 160 управления.
[0056] Помимо этого или альтернативно, функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать состояние подсвечивания указателя поворота окружающего транспортного средства. Например, функция перебазирования окружающих транспортных средств может служить для того, чтобы обнаруживать состояние подсвечивания указателя поворота окружающего транспортного средства с использованием камеры переднего вида, которая захватывает изображения впереди рассматриваемого транспортного средства, камеры заднего вида, которая захватывает изображения позади рассматриваемого транспортного средства, и т.п. В примере, проиллюстрированном на фиг. 8, например, функция перебазирования окружающих транспортных средств может служить для того, чтобы обнаруживать то, что "левосторонний указатель поворота мигает", в качестве состояния подсвечивания указателя поворота окружающего транспортного средства A.
[0057] Затем функция перебазирования окружающих транспортных средств служит для того, чтобы размещать позицию окружающего транспортного средства в соответствующей полосе движения на основе направления движения в каждой полосе движения дороги, по которой движется окружающее транспортное средство, и состояния подсвечивания указателя поворота окружающего транспортного средства. В примере, проиллюстрированном на фиг. 8, например, направление движения в полосе B движения представляет собой направление "движения по прямой вперед", тогда как направление движения в полосе A движения представляет собой направление "поворота налево", и левосторонний указатель поворота окружающего транспортного средства A мигает. Ввиду этого функция перебазирования окружающих транспортных средств может определять то, что полоса движения, в которой движется окружающее транспортное средство A, представляет собой полосу A движения, которая представляет собой специальную полосу движения для поворота налево. Соответственно, функция перебазирования окружающих транспортных средств служит для того, чтобы оценивать то, что полоса движения, в которой движется окружающее транспортное средство A, представляет собой полосу A движения, и размещать позицию окружающего транспортного средства A в полосе A движения на карте.
[0058] В альтернативной конфигурации, когда окружающее транспортное средство A движется в зоне запрета смены полосы движения, как проиллюстрировано на фиг. 8, функция перебазирования окружающих транспортных средств может служить для того, чтобы размещать позицию окружающего транспортного средства в полосе A движения, в которой позиция окружающего транспортного средства A размещается во время предыдущего процесса, без оценки полосы движения, в которой движется окружающее транспортное средство A. В примере, проиллюстрированном на фиг. 8, например, когда окружающее транспортное средство A движется в зоне запрета смены полосы движения, после однократного размещения позиции окружающего транспортного средства A в полосе A движения, функция перебазирования окружающих транспортных средств может служить для того, чтобы размещать позицию окружающего транспортного средства A в полосе A движения в то время, когда окружающее транспортное средство A движется в зоне запрета смены полосы движения.
[0059] Далее описывается способ размещения позиции окружающего транспортного средства B. В примере, проиллюстрированном на фиг. 8, окружающее транспортное средство B обнаруживается в полосе D движения, которая разрешает движение в противоположном направлении относительно направления движения окружающего транспортного средства B. С другой стороны, в дополнение к полосе D движения, полосы E и F движения существуют на дороге, по которой движется окружающее транспортное средство B. Как проиллюстрировано на фиг. 9, соединение полосы E движения соединяется с соединением полосы G движения в направлении движения по прямой вперед через узел полосы E движения и узел полосы G движения, а также соединяется с соединением полосы C движения в направлении поворота направо через узел полосы E движения и узел полосы C движения. Ввиду этого функция перебазирования окружающих транспортных средств может служить для того, чтобы определять то, что направление движения в полосе E движения представляет собой направление "движения по прямой вперед" или "поворота направо". Соединение полосы F движения соединяется только с соединением полосы H движения в направлении движения по прямой вперед через узел полосы F движения и узел полосы H движения. Ввиду этого функция перебазирования окружающих транспортных средств может служить для того, чтобы определять то, что направление движения в полосе F движения представляет собой направление "движения по прямой вперед".
[0060] Помимо этого или альтернативно, в примере, проиллюстрированном на фиг. 8, функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать "не горит" в качестве состояния подсвечивания указателя поворота окружающего транспортного средства B. Затем на основе результатов обнаружения направлений движения в полосах E и F движения, функция перебазирования окружающих транспортных средств служит для того, чтобы оценивать то, что вероятность движения по встречной полосе окружающего транспортного средства B в полосе D движения является низкой, и окружающее транспортное средство B движется в полосе E или F движения, и размещать позицию окружающего транспортного средства B в полосе E или F движения на карте.
[0061] Фиг. 10 примерно иллюстрирует окружение, в котором рассматриваемое транспортное средство поворачивает направо (изменяет направление) на Т-образном перекрестке в окружении, проиллюстрированном на фиг. 9. Как проиллюстрировано на фиг. 10, когда рассматриваемое транспортное средство изменяет направление, угол ориентации рассматриваемого транспортного средства варьируется, чтобы формировать скорость относительно вертикальной оси. Это может ухудшать надежность результатов обнаружения позиции и скорости окружающего транспортного средства посредством датчика 110 обнаружения окружающих условий, и позиция окружающего транспортного средства может обнаруживаться в позиции, отличающейся от фактической позиции окружающего транспортного средства. Согласно второму варианту осуществления, даже в таком случае, функция перебазирования окружающих транспортных средств может служить для того, чтобы оценивать полосу движения, в которой движется окружающее транспортное средство, и размещать позицию окружающего транспортного средства в оцененной полосе движения, на основе направления движения в каждой полосе движения дороги, по которой движется окружающее транспортное средство и состояния подсвечивания указателя поворота окружающего транспортного средства. Через эту операцию, в примере, проиллюстрированном на фиг. 10, функция перебазирования окружающих транспортных средств может служить для того, чтобы размещать позицию окружающего транспортного средства A в полосе A движения и размещать позицию окружающего транспортного средства B в полосе E движения.
[0062] Далее описывается процесс управления движением согласно второму варианту осуществления со ссылкой на фиг. 11. Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно второму варианту осуществления. Этапы S101 в S110 во втором варианте осуществления являются идентичными этапам в первом варианте осуществления, и их описание опускается.
[0063] Таким образом, этап S201 выполняется после этапа S110, на котором обнаруживаются позиция и скорость окружающего транспортного средства. На этапе S201, функция определения направления движения служит для того, чтобы определять то, движется или нет рассматриваемое транспортное средство прямо вперед или изменяет направление. Когда рассматриваемое транспортное средство остановлено, надежность результатов обнаружения позиции и скорости окружающего транспортного средства является высокой, так что процедура переходит к этапу S113, на котором процесс выполняется таким образом, что позиция окружающего транспортного средства размещается в позиции на карте, соответствующей обнаруженной позиции окружающего транспортного средства. Когда рассматриваемое транспортное средство движется прямо вперед или изменяет направление, надежность результатов обнаружения позиции и скорости окружающего транспортного средства является низкой, так что процедура переходит к этапу S202, чтобы надлежащим образом оценивать полосу движения, в которой движется окружающее транспортное средство.
[0064] На этапе S202, функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать направление движения в каждой полосе движения дороги, по которой движется окружающее транспортное средство. Например, функция перебазирования окружающих транспортных средств может служить для того, чтобы получать информацию относительно соединения и узла каждой полосы движения дороги, по которой движется окружающее транспортное средство, как проиллюстрировано на фиг. 9, из картографической базы 130 данных и обнаруживать направление движения в каждой полосе движения на основе полученной информации на соединениях и узлах. Функция перебазирования окружающих транспортных средств также служит для того, чтобы определять то, движется или нет окружающее транспортное средство в зоне запрета смены полосы движения, из информации относительно направления движения в каждой полосе движения.
[0065] На этапе S203, функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать состояние подсвечивания указателя поворота окружающего транспортного средства. Функция перебазирования окружающих транспортных средств может обнаруживать состояние подсвечивания указателя поворота окружающего транспортного средства, например, с использованием камеры переднего вида, которая захватывает изображения впереди рассматриваемого транспортного средства.
[0066] На этапе S204, функция перебазирования окружающих транспортных средств служит для того, чтобы оценивать позицию окружающего транспортного средства на основе направления движения в каждой полосе движения дороги, по которой движется окружающее транспортное средство, и состояния подсвечивания указателя поворота окружающего транспортного средства. Затем на этапе S205, функция перебазирования окружающих транспортных средств служит для того, чтобы размещать позицию окружающего транспортного средства в позиции на карте, соответствующей позиции окружающего транспортного средства, которая оценивается на этапе S205.
[0067] В примере, проиллюстрированном на фиг. 8, например, рассматриваемое транспортное средство движется прямо вперед, чтобы въезжать на перекресток (этап S201="Да"). В этом случае, функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать направления движения в полосах A и B движения дороги, по которой движется окружающее транспортное средство A, в качестве направлений поворота налево и движения по прямой вперед, соответственно, и обнаруживать то, что, окружающее транспортное средство A существует в зоне запрета смены полосы движения (этап S202). Функция перебазирования окружающих транспортных средств также служит для того, чтобы обнаруживать то, что, окружающее транспортное средство A мигает левосторонним указателем поворота (этап S203). Через эту операцию, функция перебазирования окружающих транспортных средств служит для того, чтобы оценивать то, что окружающее транспортное средство A существует в полосе A движения, которая представляет собой специальную полосу движения для поворота налево (этап S204), и размещать позицию окружающего транспортного средства A в полосе A движения на карте (этап S205).
[0068] Помимо этого, функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать направления движения в полосах E и F движения дороги, по которой движется окружающее транспортное средство B, в качестве направлений "движения по прямой вперед или поворота направо" и "движения по прямой вперед", соответственно (этап S202). Функция перебазирования окружающих транспортных средств также служит для того, чтобы обнаруживать то, что, окружающее транспортное средство B не мигает указателем поворота (этап S203). Функция перебазирования окружающих транспортных средств дополнительно служит для того, чтобы определять то, что вероятность движения по встречной полосе окружающего транспортного средства B в полосе D движения является низкой, и оценивать то, что окружающее транспортное средство B движется в полосе E или F движения, которая разрешает двигаться по прямой вперед (этап S204). Ввиду этого функция перебазирования окружающих транспортных средств служит для того, чтобы размещать позицию окружающего транспортного средства B в полосе E или F движения (этап S205). В этой операции, как проиллюстрировано на фиг. 8, функция перебазирования окружающих транспортных средств может служить для того, чтобы размещать позицию окружающего транспортного средства B в той полосе движения из полос E и F движения, которая находится ближе к позиции, в которой окружающее транспортное средство B обнаруживается посредством датчика 110 обнаружения окружающих условий.
[0069] Как описано выше, во втором варианте осуществления, полоса движения, в которой движется окружающее транспортное средство, оценивается на основе состояния подсвечивания указателя поворота окружающего транспортного средства и направления движения в каждой полосе движения дороги, по которой движется окружающее транспортное средство, и позиция окружающего транспортного средства размещается в позиции на карте, соответствующей оцененной полосе движения. Через эту операцию, во втором варианте осуществления, полоса движения, в которой движется окружающее транспортное средство, может более надлежащим образом оцениваться с учетом направления движения в каждой полосе движения дороги, по которой движется окружающее транспортное средство, и позиция окружающего транспортного средства может размещаться в соответствующей позиции на карте.
[0070] Кроме того, во втором варианте осуществления, выполняется определение в отношении того, движется или нет окружающее транспортное средство в зоне запрета смены полосы движения, на основе направления движения в каждой полосе движения дороги, по которой движется окружающее транспортное средство, и когда окружающее транспортное средство движется в зоне запрета смены полосы движения, позиция окружающего транспортного средства оценивается в идентичной полосе движения. Через эту операцию, полоса движения, в которой движется окружающее транспортное средство, может надлежащим образом оцениваться в соответствии с правилом дорожного движения, применяемый к зоне запрета смены полосы движения, и позиция окружающего транспортного средства может размещаться в соответствующей позиции на карте.
[0071] Кроме того, во втором варианте осуществления, когда рассматриваемое транспортное средство изменяет направление или движется по прямой вперед, выполняется определение в отношении того, что направление движения окружающего транспортного средства не совпадает с направлением движения в полосе движения, и позиция размещения окружающего транспортного средства корректируется. Это обеспечивает возможность размещения позиции окружающего транспортного средства в соответствующей позиции даже в окружении, в котором точность обнаружения позиции и скорости окружающего транспортного средства ухудшается, поскольку рассматриваемое транспортное средство движется.
[0072] Третий вариант осуществления
Далее описывается устройство 100 управления движением согласно третьему варианту осуществления настоящего изобретения. Устройство 100 управления движением имеет конфигурацию, идентичную конфигурации в первом варианте осуществления, за исключением того, что оно работает следующим образом.
[0073] В третьем варианте осуществления, устройство 160 управления использует функцию перебазирования окружающих транспортных средств для того, чтобы определять позиции рассматриваемого транспортного средства и окружающего транспортного средства на карте на основе дорожных ориентиров и форм дорог (включающих в себя кривизну дороги). Дорожные ориентиры означают ориентиры, такие как стоп-линии, дорожные знаки, светофоры и пожарные гидранты, которые закрепляются на поверхности дороги или около поверхности дороги и могут представлять собой ориентиры. Форма дороги означает форму дороги, к примеру, кривую.
[0074] Функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать дорожные ориентиры и формы дорог на основе результатов обнаружения посредством камеры или лазерного дальномера, который составляет датчик 110 обнаружения окружающих условий. Функция перебазирования окружающих транспортных средств также служит для того, чтобы обнаруживать дорожные ориентиры и формы дорог из картографической информации. В настоящем варианте осуществления, картографическая информация, сохраненная в картографической базе 130 данных, включает в себя информацию относительно позиций дорожных ориентиров и форм дорог. Информация относительно дорожных ориентиров включает в себя ширину стоп-линии, форму и высоту дорожного знака и форму, размер и высоту светофора и пожарного гидранта. Картографическая база 130 данных сохраняет форму дороги каждой полосы движения в качестве последовательности точек или полиномиальной функции. Картографическая база 130 данных также сохраняет тип (к примеру, сплошная линия, сдвоенная линия и пунктирная линия) и цвет (к примеру, белый и желтый) разделительных линий, которые задают каждую полосу движения. Таким образом, функция перебазирования окружающих транспортных средств может служить для того, чтобы обращаться к картографической информации, сохраненной в картографической базе 130 данных, и ввиду этого обнаруживать дорожные ориентиры и формы дорог рядом с рассматриваемым транспортным средством.
[0075] Фиг. 12A примерно иллюстрирует окружение, в котором рассматриваемое транспортное средство въезжает на крестообразный перекресток. В примере, проиллюстрированном на фиг. 12A, позиция рассматриваемого транспортного средства обнаруживается в позиции, отдельной от стоп-линии перекрестка в некоторой степени, на основе результата измерений посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства. Фиг. 12B является видом, иллюстрирующим пример результата обнаружения посредством датчика 110 обнаружения окружающих условий в окружении, проиллюстрированном на фиг. 12A. Как проиллюстрировано на фиг. 12B, стоп-линия перекрестка обнаруживается просто впереди рассматриваемого транспортного средства в соответствии с результатом обнаружения посредством датчика 110 обнаружения окружающих условий. Таким образом, в примере, проиллюстрированном на фиг. 12A, позиция рассматриваемого транспортного средства, обнаруженная посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, представляет собой позицию, отличающуюся от позиции рассматриваемого транспортного средства на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий вследствие ошибки обнаружения устройства 120 обнаружения позиции рассматриваемого транспортного средства.
[0076] В этом случае, функция перебазирования окружающих транспортных средств служит для того, чтобы выполнять согласование между стоп-линией, обнаруженной посредством датчика 110 обнаружения окружающих условий, и стоп-линией, обнаруженной на основе картографической информации, как проиллюстрировано на фиг. 13, чтобы за счет этого корректировать позицию рассматриваемого транспортного средства в направлении движения рассматриваемого транспортного средства. Через эту операцию, даже когда ошибка обнаружения возникает в устройстве 120 обнаружения позиции рассматриваемого транспортного средства, позиция рассматриваемого транспортного средства может надлежащим образом оцениваться, и позиция рассматриваемого транспортного средства может размещаться в соответствующей позиции на карте.
[0077] Функция перебазирования окружающих транспортных средств также служит для того, чтобы корректировать позицию окружающего транспортного средства в соответствии с коррекцией позиции рассматриваемого транспортного средства. Это описывается подробнее. Когда ошибка возникает в позиции рассматриваемого транспортного средства, как проиллюстрировано на фиг. 12A, ошибка также возникает в позиции окружающего транспортного средства, обнаруженной со ссылкой на позицию рассматриваемого транспортного средства. Соответственно, при коррекции позиции рассматриваемого транспортного средства на карте, функция перебазирования окружающих транспортных средств также служит для того, чтобы перемещать позицию окружающего транспортного средства на карте в направлении, идентичном направлению рассматриваемого транспортного средства на величину перемещения, идентичную величине перемещения рассматриваемого транспортного средства. Через эту операцию, как проиллюстрировано на фиг. 13, полоса движения, в которой движется окружающее транспортное средство, может надлежащим образом оцениваться, и позиция окружающего транспортного средства может размещаться в соответствующей полосе движения на карте.
[0078] Далее описывается процесс управления движением согласно третьему варианту осуществления со ссылкой на фиг. 14. Фиг. 14 является видом для описания процесса управления движением согласно третьему варианту осуществления. Процесс управления движением, проиллюстрированный на фиг. 14, выполняется таким образом, что он соответствует процессу управления движением первого варианта осуществления, проиллюстрированного на фиг. 7. Таким образом, после того, как выполняется процесс этапа S113 или S114, проиллюстрированный на фиг. 7, выполняется процесс этапа S301, проиллюстрированный на фиг. 14.
[0079] На этапе S301, функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать дорожные ориентиры и формы дорог рядом с рассматриваемым транспортным средством на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий. На этапе S302, функция перебазирования окружающих транспортных средств служит для того, чтобы обнаруживать дорожные ориентиры и формы дорог рядом с рассматриваемым транспортным средством на основе картографической информации.
[0080] На этапе S303, функция перебазирования окружающих транспортных средств служит для того, чтобы выполнять согласование между дорожными ориентирами и формами дорог, обнаруженными на этапе S301 на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий, и дорожными ориентирами и формами дорог, обнаруженными на этапе S302 на основе картографической информации. Например, с использованием схемы сопоставления с шаблоном, функция перебазирования окружающих транспортных средств может служить для того, чтобы выполнять согласование между дорожными ориентирами на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий и дорожными ориентирами на основе картографической информации. Помимо этого, с использованием схемы ICP, функция перебазирования окружающих транспортных средств может служить для того, чтобы выполнять согласование между формами дорог на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий и формами дорог на основе картографической информации.
[0081] На этапе S304, функция перебазирования окружающих транспортных средств служит для того, чтобы корректировать позиции рассматриваемого транспортного средства и окружающего транспортного средства на основе результатов согласования этапа S303. Например, как проиллюстрировано на фиг. 13, позиции рассматриваемого транспортного средства и окружающего транспортного средства на карте корректируются таким образом, что стоп-линия, обнаруженная посредством датчика 110 обнаружения окружающих условий, совпадает со стоп-линией, обнаруженной из картографической информации, и позиции рассматриваемого транспортного средства и окружающего транспортного средства ввиду этого могут надлежащим образом оцениваться. В форме дороги, такой как перекресток и кривая, позиции рассматриваемого транспортного средства и окружающего транспортного средства корректируются таким образом, что форма дороги на основе результата обнаружения посредством датчика 110 обнаружения окружающих условий совпадает с формой дороги на основе картографической информации, и позиции рассматриваемого транспортного средства и окружающего транспортного средства ввиду этого могут надлежащим образом оцениваться. Затем функция перебазирования окружающих транспортных средств служит для того, чтобы размещать позиции рассматриваемого транспортного средства и окружающего транспортного средства на карте на основе скорректированных позиций рассматриваемого транспортного средства и окружающего транспортного средства. Это обеспечивает возможность размещения позиций рассматриваемого транспортного средства и окружающего транспортного средства в соответствующих позициях на карте.
[0082] Если, на этапе S304, позиции рассматриваемого транспортного средства и окружающего транспортного средства внезапно изменены на карте, некомфортное ощущение может вызываться у водителя. Чтобы разрешать эту проблему, величины перемещения (величины коррекции) позиций рассматриваемого транспортного средства и окружающего транспортного средства могут обрабатываться с использованием определенного фильтра, чтобы за счет этого облегчать изменение позиций рассматриваемого транспортного средства и окружающего транспортного средства, и некомфортное ощущение, возникающее у водителя, ввиду этого может уменьшаться.
[0083] Как описано выше, в третьем варианте осуществления, позиции рассматриваемого транспортного средства и окружающего транспортного средства корректируются на карте таким образом, что дорожные ориентиры и формы дорог, обнаруженные посредством датчика 110 обнаружения окружающих условий, совпадают с дорожными ориентирами и формами дорог, обнаруженными из картографической информации. Полосы движения, в которых движутся рассматриваемое транспортное средство и окружающее транспортное средство, ввиду этого могут надлежащим образом оцениваться, и позиции рассматриваемого транспортного средства и окружающего транспортного средства могут размещаться в соответствующих позициях на карте.
[0084] Кроме того, в третьем варианте осуществления, позиция окружающего транспортного средства перемещается в направлении, в котором позиция рассматриваемого транспортного средства корректируется на величину перемещения, и ввиду этого позиция окружающего транспортного средства также может надлежащим образом корректироваться. Когда ошибка возникает в позиции рассматриваемого транспортного средства, ошибка также возникает в позиции окружающего транспортного средства, поскольку позиция окружающего транспортного средства определяется на основе позиции рассматриваемого транспортного средства. Позиция окружающего транспортного средства ввиду этого корректируется на величину коррекции позиции рассматриваемого транспортного средства. Полоса движения, в которой движется окружающее транспортное средство, ввиду этого может надлежащим образом оцениваться, и позиция окружающего транспортного средства может размещаться в соответствующей позиции на карте.
[0085] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0086] Например, в вышеописанных одном или более вариантов осуществления настоящего изобретения, примерно иллюстрируется конфигурация, в которой полоса движения для фактического движения окружающего транспортного средства оценивается на основе направления движения в полосе движения дороги, по которой движется окружающее транспортное средство, и позиция окружающего транспортного средства размещается в соответствующей полосе движения на карте, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, полоса движения для фактического движения окружающего транспортного средства оценивается на основе направления движения в полосе движения дороги, по которой движется окружающее транспортное средство, и движение рассматриваемого транспортного средства автоматически управляется на основе результата оценки.
[0087] В вышеописанном первом варианте осуществления, примерно иллюстрируется конфигурация, в которой позиция, полученная посредством перемещения окружающего транспортного средства в направлении движения в полосе движения, в которой движется окружающее транспортное средство, оценивается в качестве позиции окружающего транспортного средства, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, направление движения окружающего транспортного средства оценивается на основе предыстории позиций окружающего транспортного средства и позиции, полученной посредством перемещения окружающего транспортного средства в оцененном направлении движения в качестве позиции окружающего транспортного средства. Также в этом случае, даже когда ошибка возникает в обнаруженной позиции окружающего транспортного средства посредством датчика 110 обнаружения окружающих условий, полоса движения, в которой движется окружающее транспортное средство, может надлежащим образом оцениваться, и позиция окружающего транспортного средства может размещаться в соответствующей позиции на карте.
[0088] В вышеописанном первом варианте осуществления, примерно иллюстрируется конфигурация, в которой когда рассматриваемое транспортное средство изменяет направление, выполняется определение в отношении того, что направление движения окружающего транспортного средства не совпадает с направлением движения в полосе движения, в которой движется окружающее транспортное средство, и позиция окружающего транспортного средства корректируется, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой также когда рассматриваемое транспортное средство движется прямо вперед, выполняется определение в отношении того, что направление движения окружающего транспортного средства не совпадает с направлением движения в полосе движения, в которой движется окружающее транспортное средство, и позиция окружающего транспортного средства корректируется.
[0089] В дополнение к вышеописанному или более вариантов осуществления настоящего изобретения, может использоваться конфигурация, в которой при условии, что окружающее транспортное средство существует в полосе движения для движения рассматриваемого транспортного средства, даже когда рассматриваемое транспортное средство изменяет направление, позиция окружающего транспортного средства размещается в позиции, обнаруженной посредством датчика 110 обнаружения окружающих условий. Также в этом случае, ошибка обнаружения вследствие скорости относительно вертикальной оси возникает с меньшей вероятностью, и позиция окружающего транспортного средства может размещаться в соответствующей позиции.
[0090] Датчик 110 обнаружения окружающих условий в вышеописанных вариантах осуществления соответствует средству обнаружения настоящего изобретения.
Описание номеров ссылок
[0091] 100 - устройство управления движением
110 - датчик обнаружения окружающих условий
120 - устройство обнаружения позиции рассматриваемого транспортного средства
130 - картографическая база данных
140 - устройство представления
150 - устройство управления приведением в движение
160 - устройство управления.
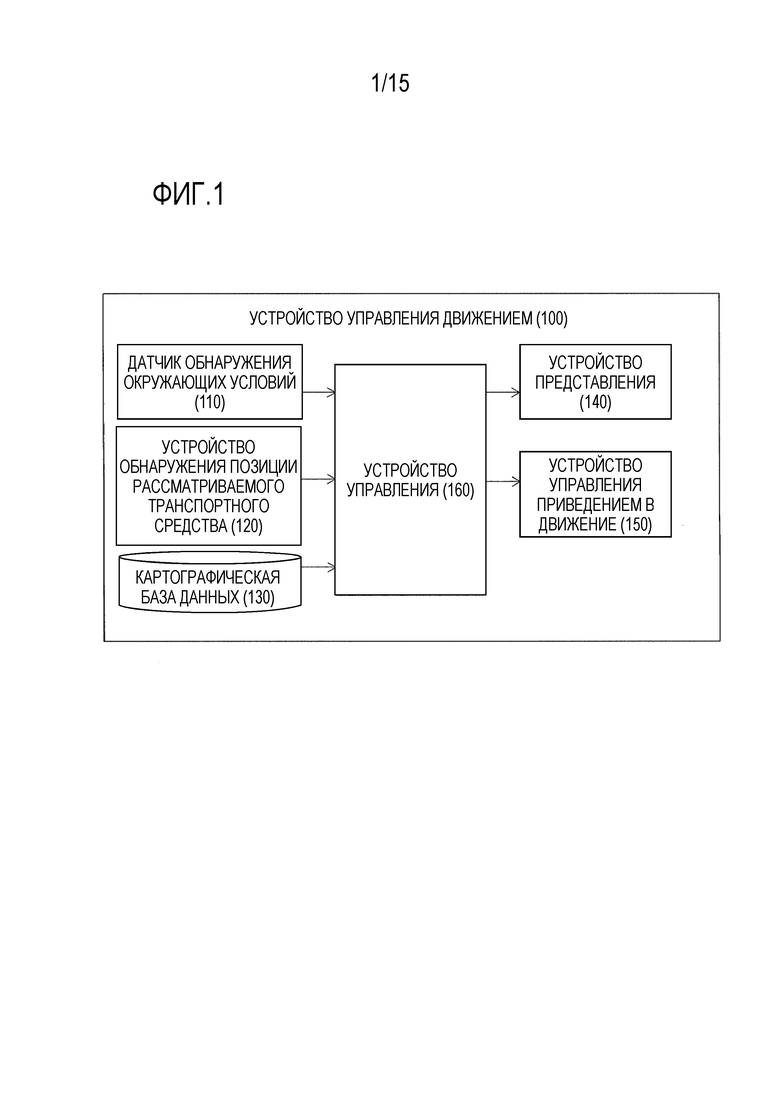
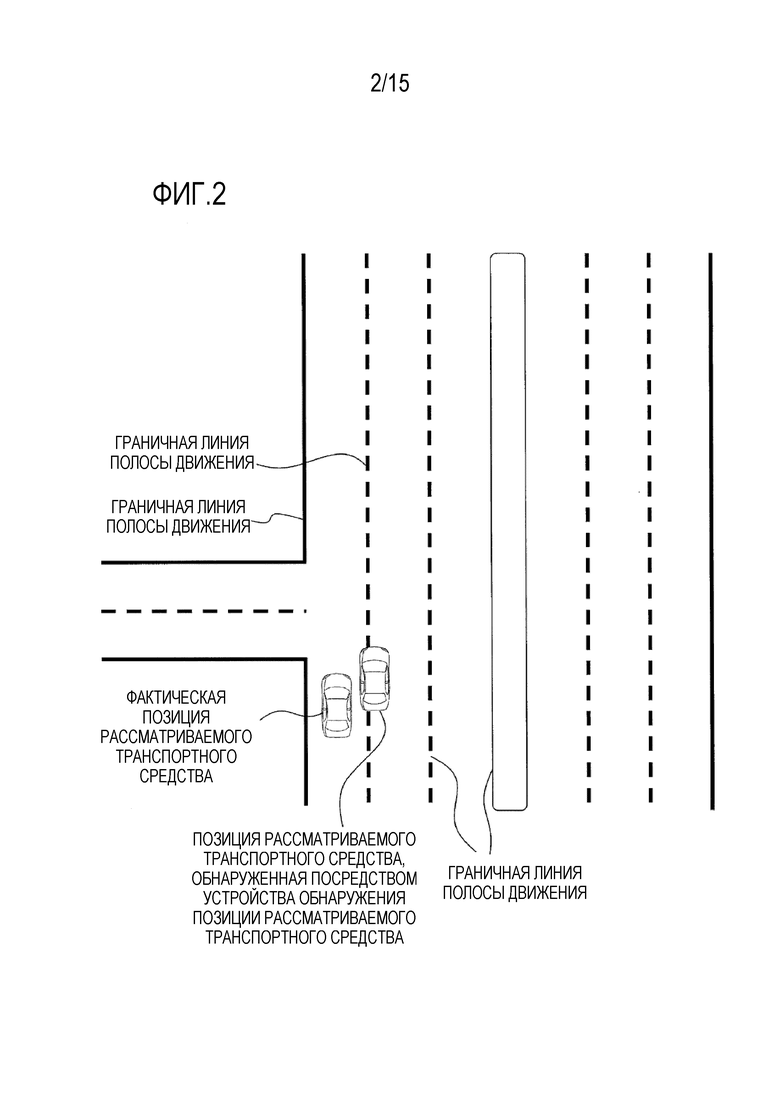
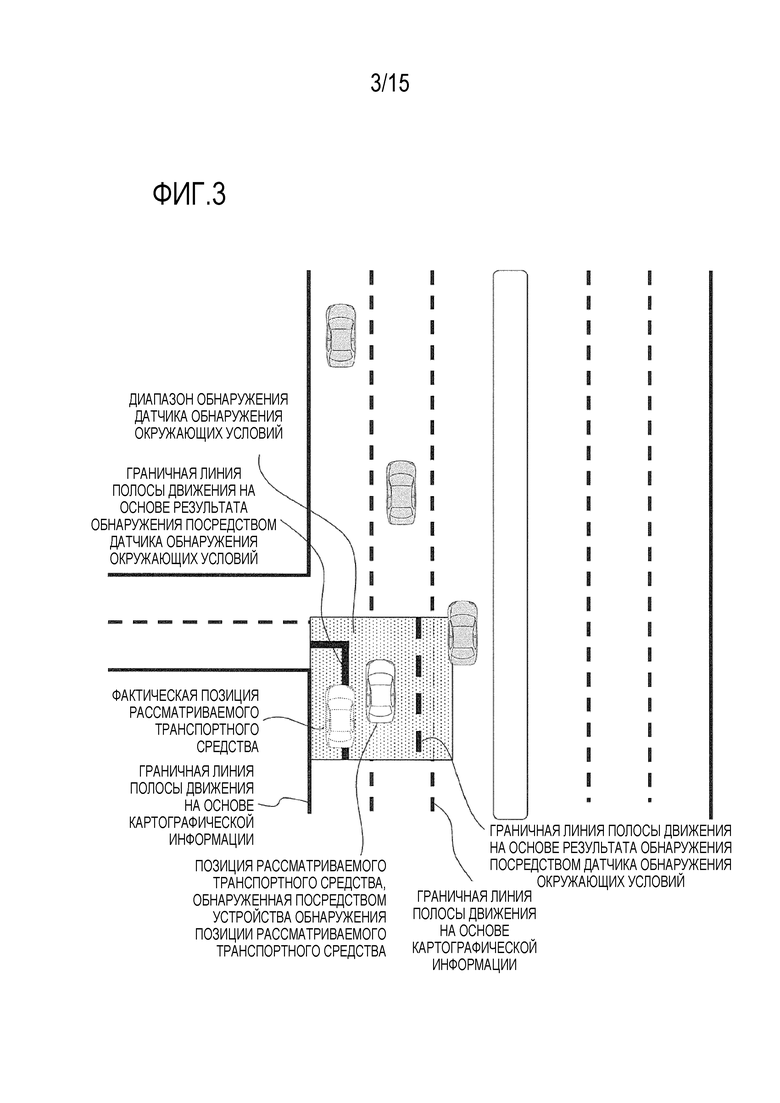
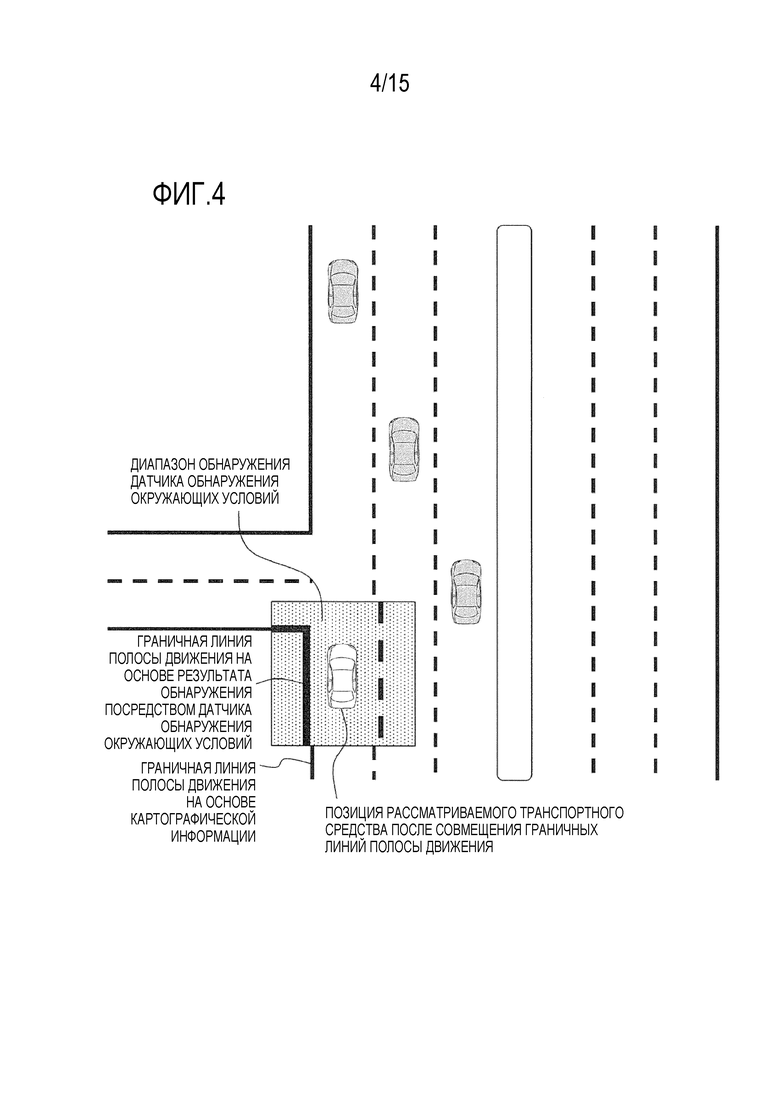
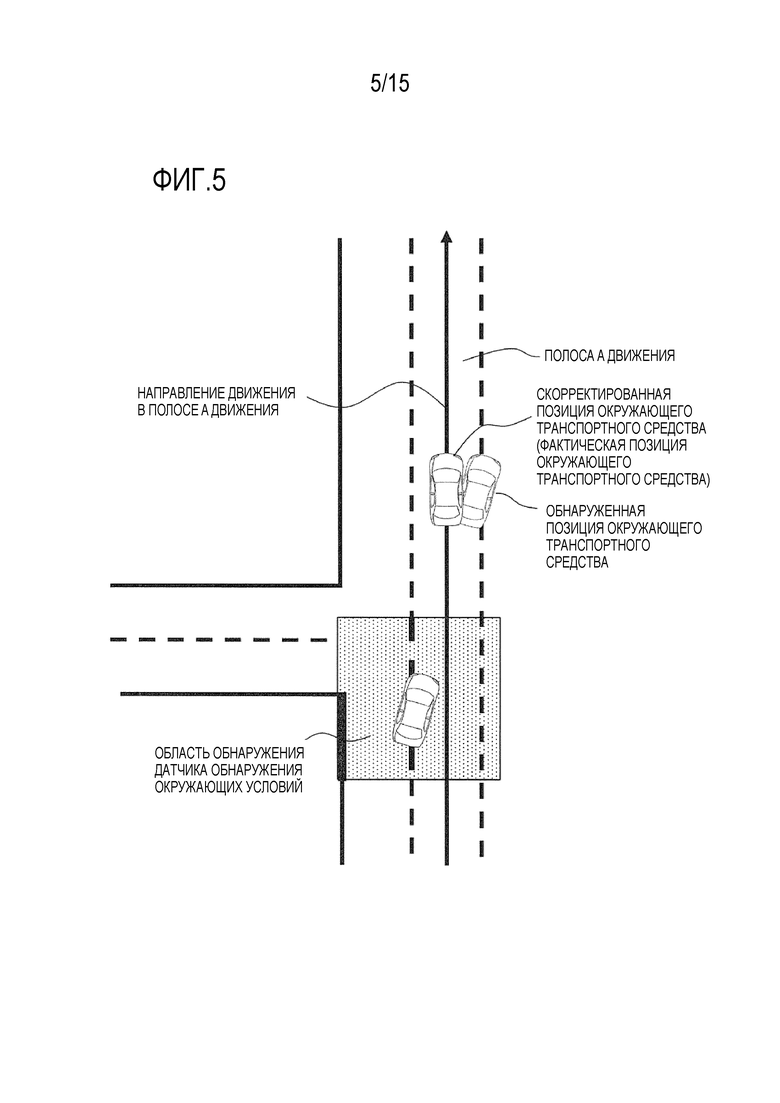
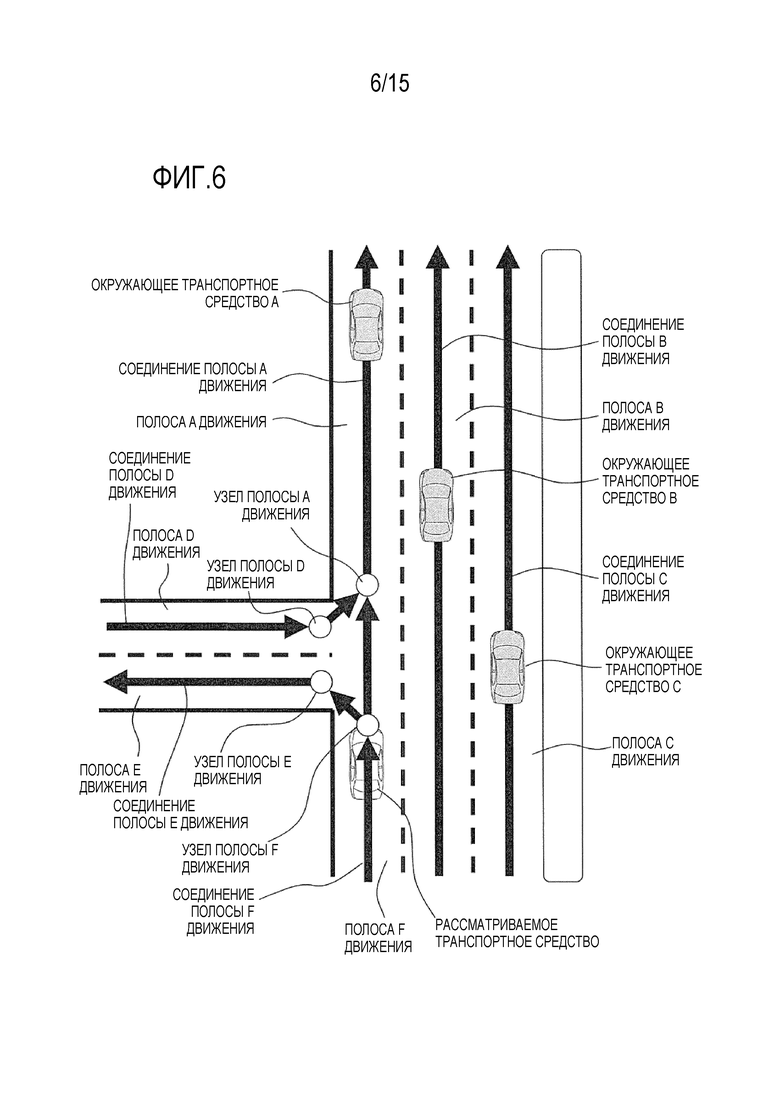
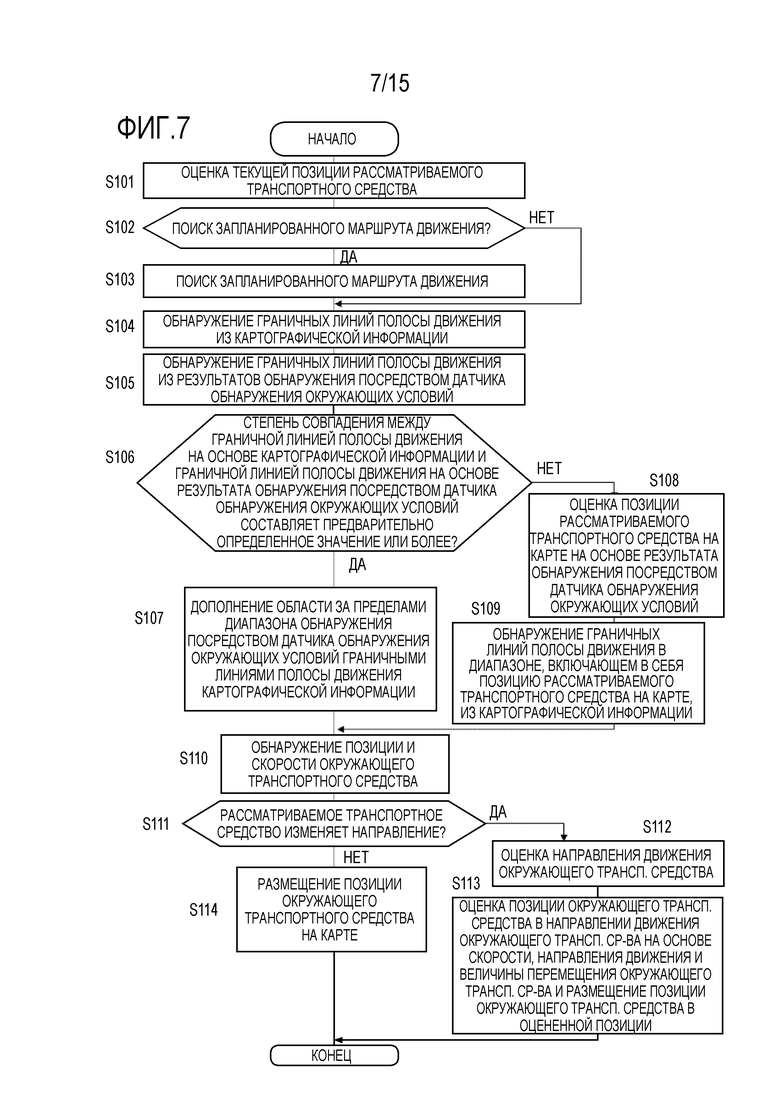
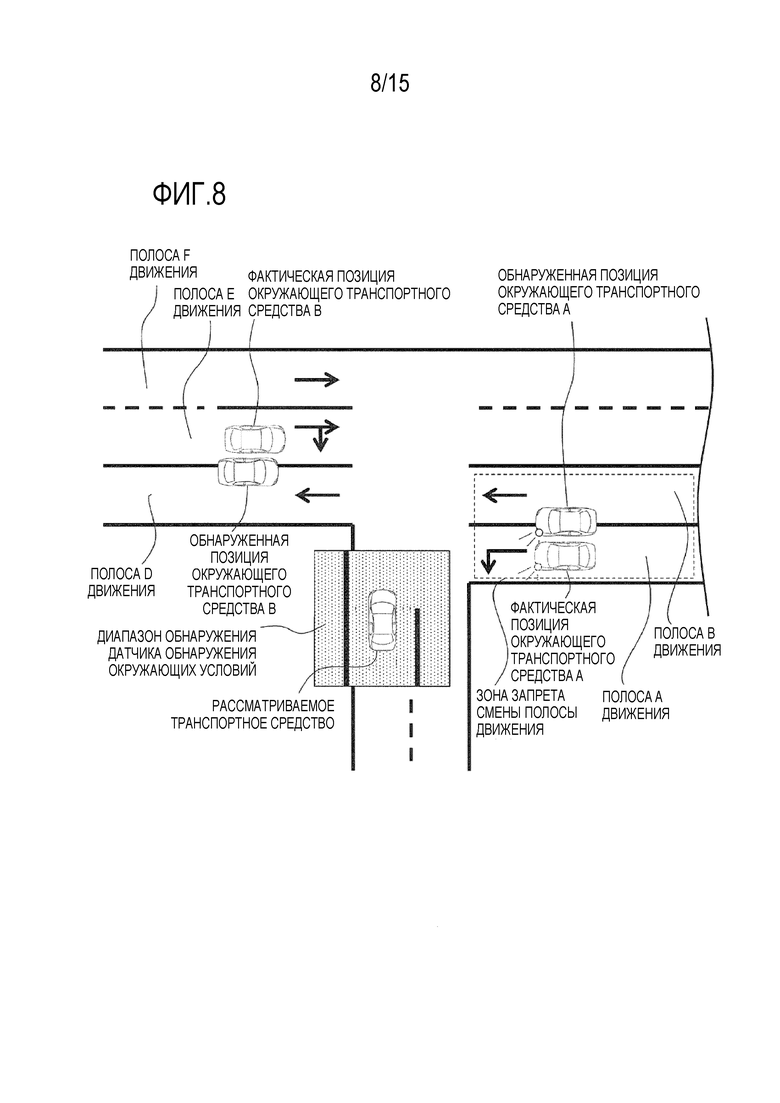
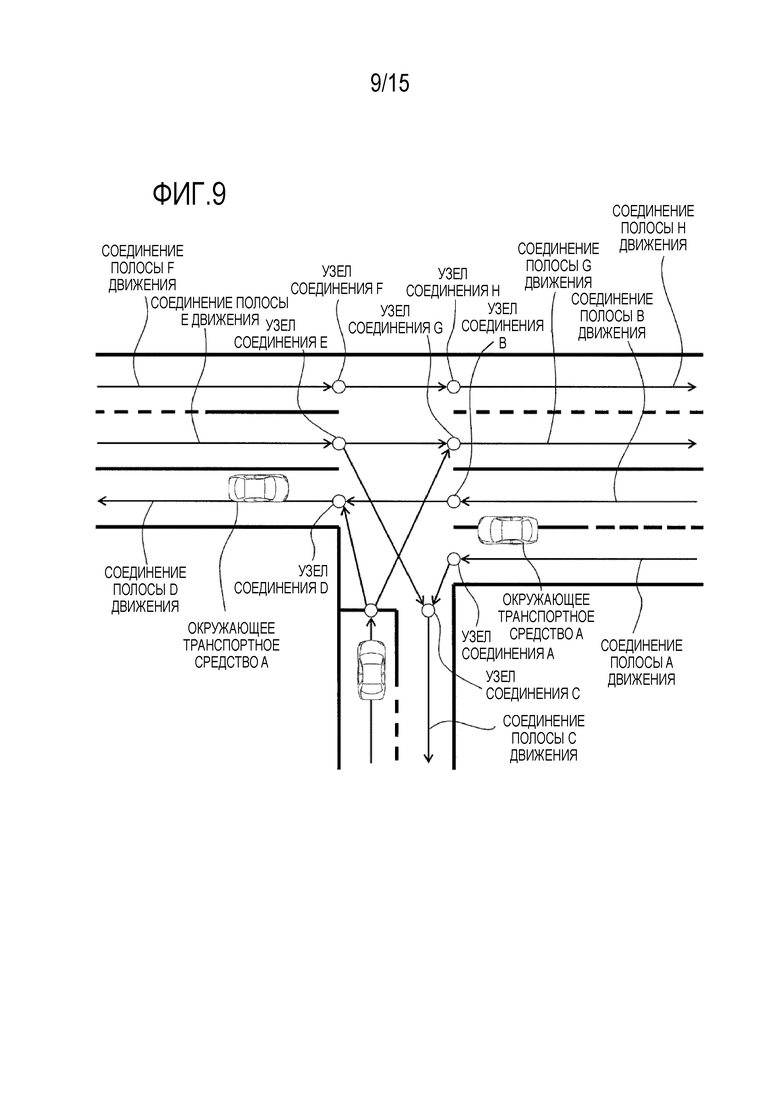
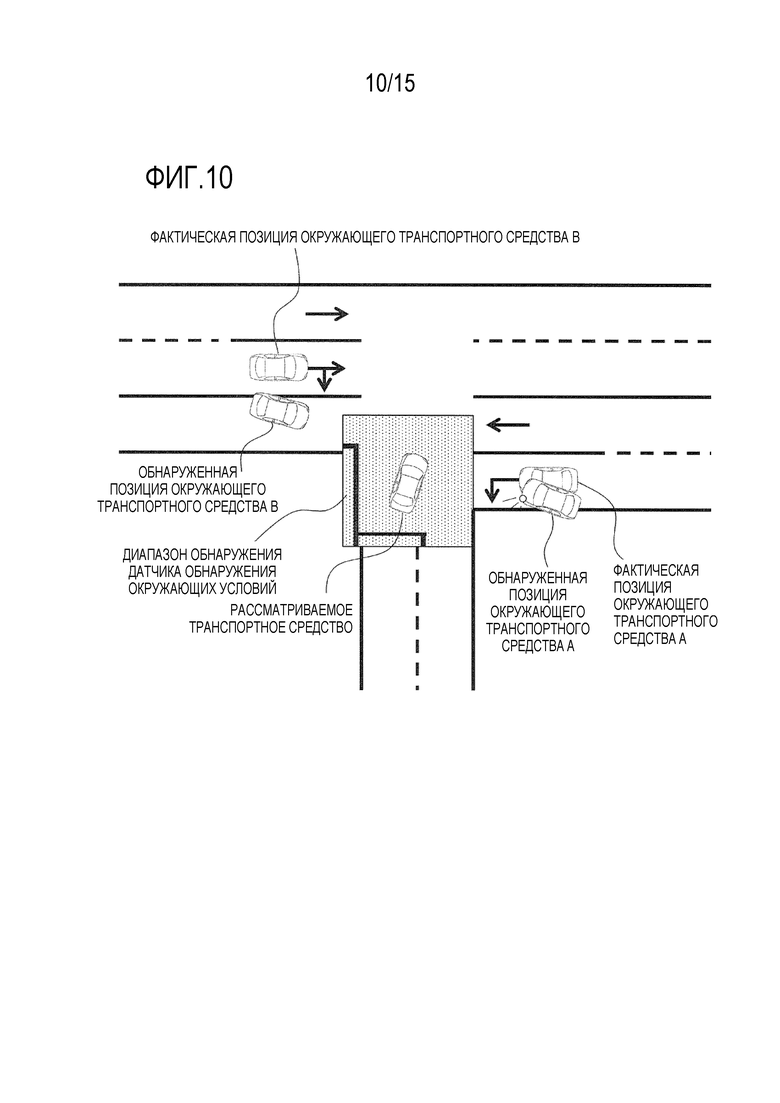
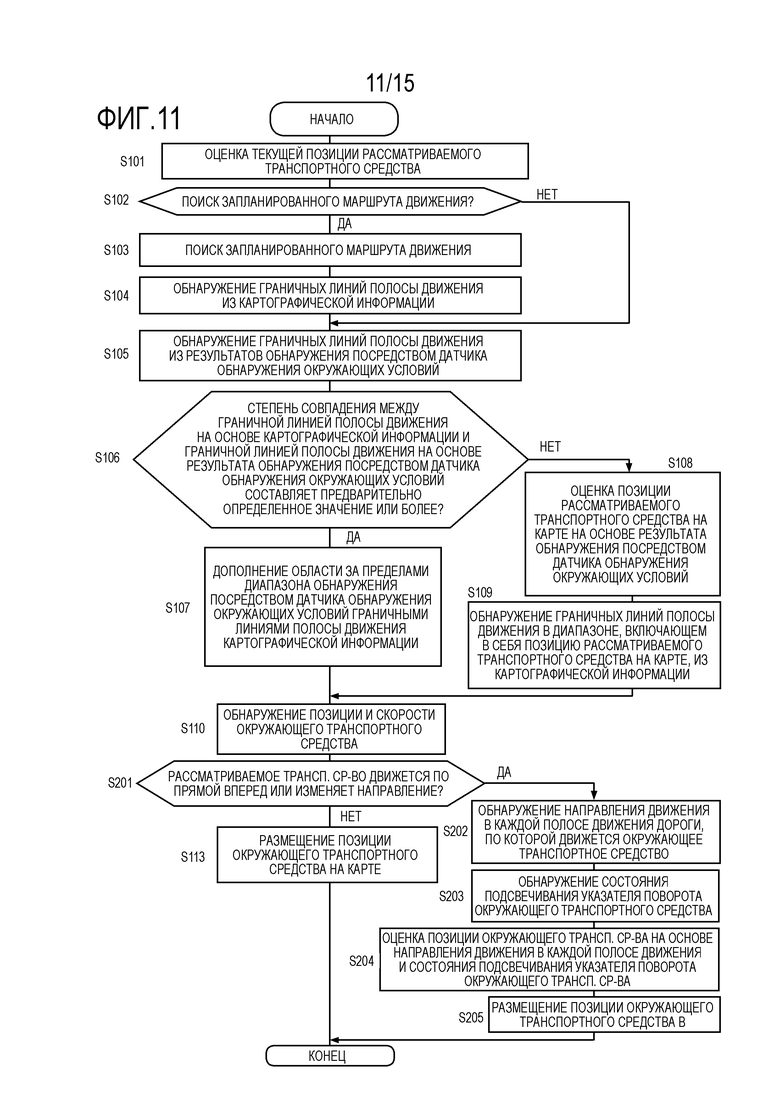
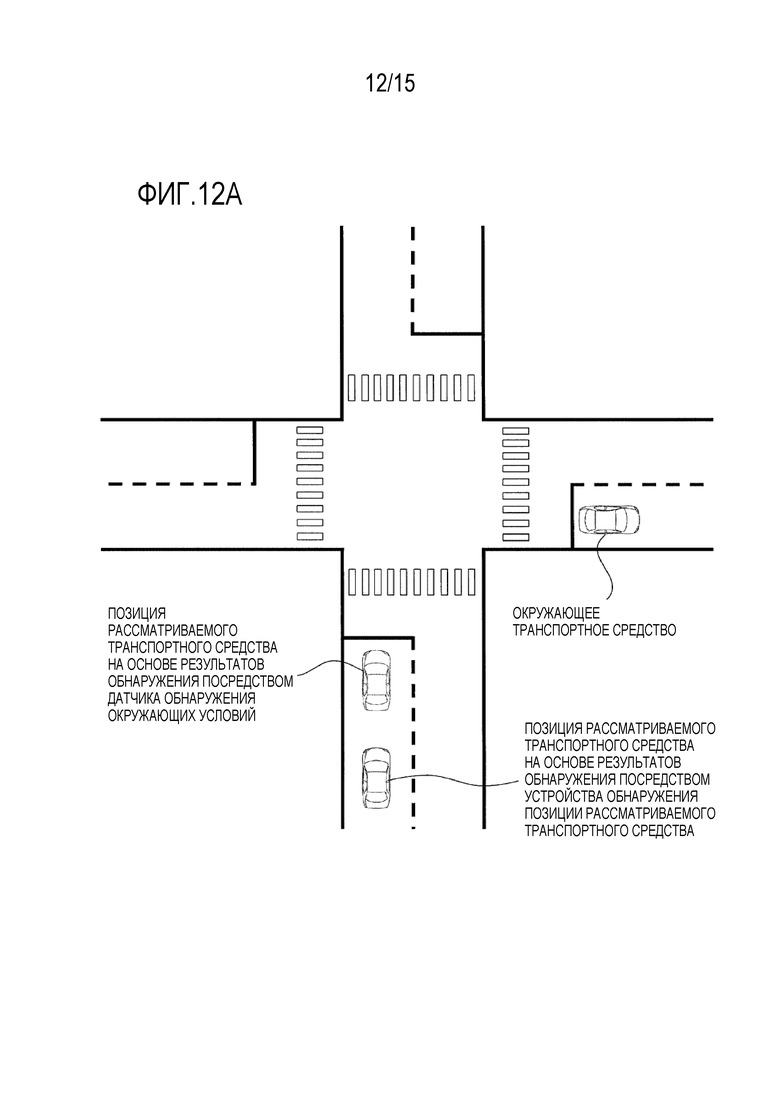
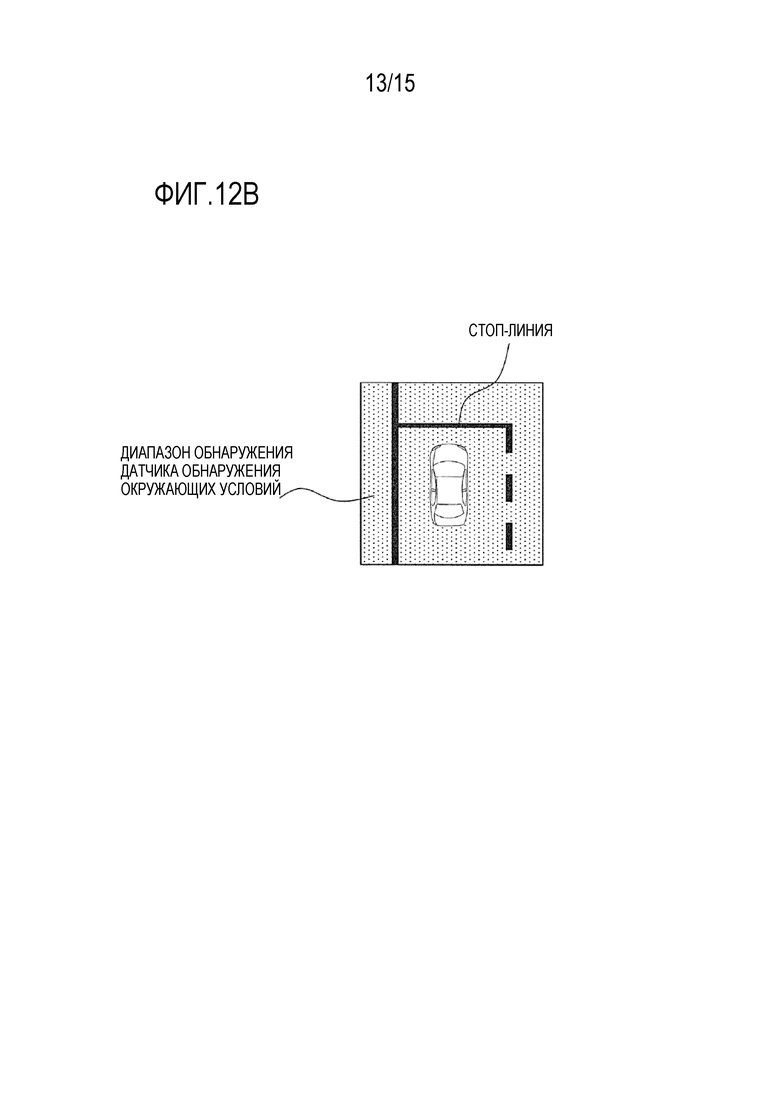
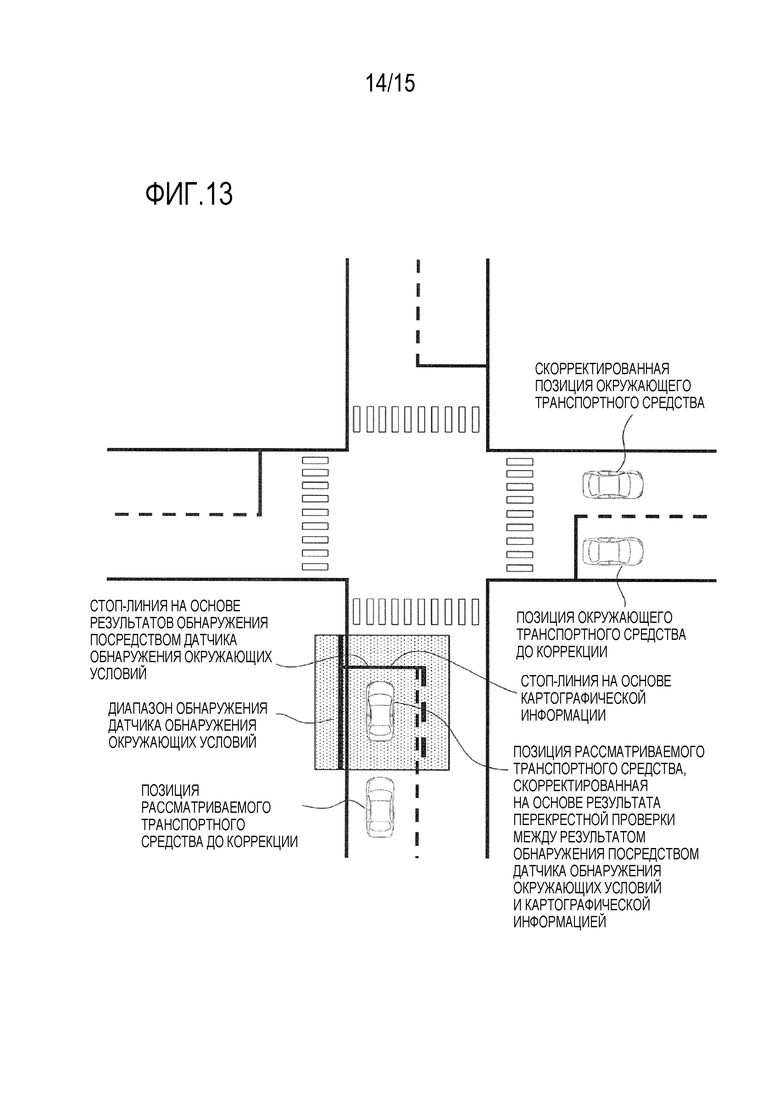
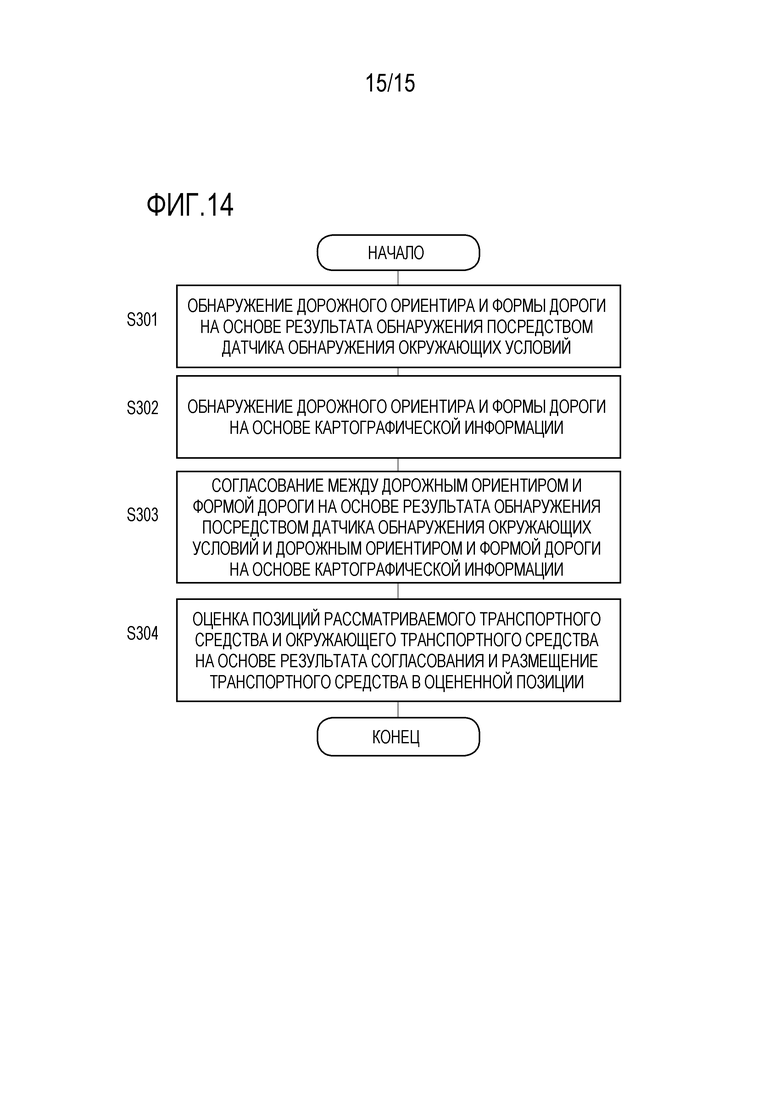
Предусмотрены способ и устройство управления движением для оценки позиции движущегося объекта рядом с рассматриваемым транспортным средством с использованием средства (110) обнаружения, выполненного с возможностью обнаруживать движущийся объект. Способ включает в себя обнаружение направления движения в полосе движения из картографической информации. Полоса движения расположена на дороге, по которой движется движущийся объект. Когда рассматриваемое транспортное средство изменяет направление, позиция движущегося объекта оценивается на основе направления движения в полосе движения. 2 н. и 12 з.п. ф-лы, 15 ил.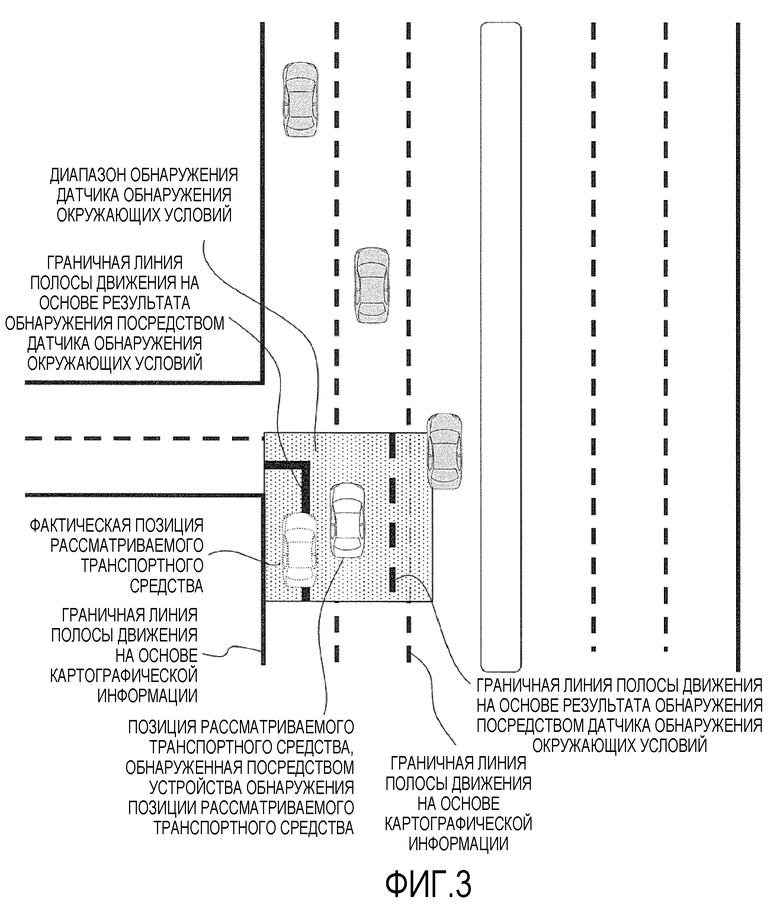
1. Способ управления движением оценки позиции движущегося объекта рядом с рассматриваемым транспортным средством с использованием средства обнаружения, выполненного с возможностью обнаруживать движущийся объект, содержащий этапы, на которых:
обнаруживают направление движения в полосе движения из картографической информации, причем полоса движения расположена на дороге, по которой движется движущийся объект; и
корректируют позицию движущегося объекта, обнаруженную посредством средства обнаружения, на основе направления движения в полосе движения, обнаруженного из картографической информации,
отличающийся тем, что дополнительно содержит этап, на котором определяют то, изменяет или нет рассматриваемое транспортное средство направление,
причем когда рассматриваемое транспортное средство изменяет направление, корректируют позицию движущегося объекта, обнаруженную посредством средства обнаружения, на основе направления движения в полосе движения, обнаруженного из картографической информации, и
при этом когда рассматриваемое транспортное средство не изменяет направление, позиция движущегося объекта, обнаруженная посредством средства обнаружения, не корректируется на основе направления движения в полосе движения, обнаруженного из картографической информации.
2. Способ управления движением по п. 1, в котором когда рассматриваемое транспортное средство изменяет направление, позиция движущегося объекта корректируется на позицию, полученную посредством перемещения движущегося объекта в направлении движения в полосе движения, в которой движется движущийся объект.
3. Способ управления движением по п. 2, в котором когда рассматриваемое транспортное средство изменяет направление, величина перемещения движущегося объекта оценивается на основе предыстории позиций движущегося объекта, и позиция движущегося объекта корректируется на позицию, полученную посредством перемещения движущегося объекта из ранее скорректированной позиции движущегося объекта на величину перемещения в направлении движения в полосе движения, в которой движется движущийся объект.
4. Способ управления движением по любому из пп. 1-3, в котором когда рассматриваемое транспортное средство изменяет направление, направление перемещения движущегося объекта оценивается на основе предыстории позиций движущегося объекта, и позиция движущегося объекта корректируется на позицию, полученную посредством перемещения движущегося объекта в оцененном направлении перемещения движущегося объекта.
5. Способ управления движением по п. 1, в котором полоса движения, в которой движется движущийся объект, оценивается на основе состояния подсвечивания указателя поворота движущегося объекта и направления движения в каждой полосе движения дороги, по которой движется движущийся объект, и позиция движущегося объекта корректируется на позицию в оцененной полосе движения.
6. Способ управления движением по п. 5, в котором выполняется определение в отношении того, движется или нет движущийся объект в зоне запрета смены полосы движения, на основе направления движения в каждой полосе движения, и позиция движущегося объекта корректируется в идентичной полосе движения в то время, когда движущийся объект движется в зоне запрета смены полосы движения.
7. Способ управления движением по любому из пп. 1-3, в котором:
дорожный ориентир, предоставленный на дороге или около дороги, обнаруживается на основе результата обнаружения посредством средства обнаружения,
дорожный ориентир также обнаруживается на основе картографической информации, и
позиция рассматриваемого транспортного средства или позиция движущегося объекта корректируется таким образом, что позиция дорожного ориентира на основе результата обнаружения посредством средства обнаружения совпадает с позицией дорожного ориентира на основе картографической информации.
8. Способ управления движением по любому из пп. 1-3, в котором:
форма дороги обнаруживается на основе результата обнаружения посредством средства обнаружения,
форма дороги также обнаруживается на основе картографической информации, и
позиция рассматриваемого транспортного средства или позиция движущегося объекта корректируется таким образом, что форма дороги на основе результата обнаружения посредством средства обнаружения совпадает с формой дороги на основе картографической информации.
9. Способ управления движением по п. 7, в котором позиция рассматриваемого транспортного средства и позиция движущегося объекта корректируются в идентичном направлении на идентичную величину перемещения.
10. Способ управления движением по любому из пп. 1-3, в котором также, когда рассматриваемое транспортное средство движется прямо вперед, позиция движущегося объекта корректируется на основе направления движения в полосе движения.
11. Способ управления движением по любому из пп. 1-3, в котором:
граничная линия полосы движения рядом с рассматриваемым транспортным средством обнаруживается в качестве первой граничной линии на основе результата обнаружения посредством средства обнаружения,
граничная линия полосы движения, включающая в себя полосу движения, в которой движется рассматриваемое транспортное средство, обнаруживается в качестве второй граничной линии на основе картографической информации, и
первая граничная линия и вторая граничная линия совмещаются, чтобы формировать граничную линию полосы движения.
12. Способ управления движением по п. 11, в котором:
вторая граничная линия может обнаруживаться в диапазоне шире диапазона, в котором может обнаруживаться первая граничная линия, и
когда степень совпадения между первой граничной линией и частью второй граничной линии не меньше предварительно определенного значения, диапазон за пределами диапазона, в котором может обнаруживаться первая граничная линия, дополняется второй граничной линией.
13. Способ управления движением по п. 11, в котором когда степень совпадения между первой граничной линией и второй граничной линией меньше предварительно определенного значения, позиция рассматриваемого транспортного средства на карте, оценивается, и граничная линия полосы движения, включающая в себя оцененную позицию рассматриваемого транспортного средства на карте, дополняется второй граничной линией.
14. Устройство управления движением, содержащее:
средство обнаружения, выполненное с возможностью обнаруживать движущийся объект рядом с рассматриваемым транспортным средством; и
контроллер, выполненный с возможностью определять позицию движущегося объекта,
причем контроллер дополнительно выполнен с возможностью:
обнаруживать направление движения в полосе движения из картографической информации, причем полоса движения расположена на дороге, по которой движется движущийся объект; и
корректировать позицию движущегося объекта, обнаруженную посредством средства обнаружения, на основе направления движения в полосе движения, обнаруженного из картографической информации,
отличающееся тем, что контроллер дополнительно выполнен с возможностью:
определять то, изменяет или нет рассматриваемое транспортное средство направление; и
когда рассматриваемое транспортное средство изменяет направление, корректировать позицию движущегося объекта, обнаруженную посредством средства обнаружения, на основе направления движения в полосе движения, обнаруженного из картографической информации,
при этом когда рассматриваемое транспортное средство не изменяет направление, позиция движущегося объекта, обнаруженная посредством средства обнаружения, не корректируется на основе направления движения в полосе движения, обнаруженного из картографической информации.
| DE 102008036131 A1, 05.03.2009 | |||
| JP 2005267120 A, 29.09.2005 | |||
| JP 2012014219 A, 19.01.2012. |

