Заявленный способ зондирования ионосферы и тропосферы относится к геофизике, и предназначен для мониторинга природной среды, информационного обеспечения радиосвязи и навигации, исследования эффектов солнечной активности.
Известные технологии зондирования ионосферы базируются на взаимодействии электромагнитного излучения с ионосферной плазмой. Схемы зондирования ионосферы предусматривают излучение радиосигнала в ионосферу и его прием с последующим анализом изменения фазовых, частотных и временных характеристик.
По положению источника зондирующего сигнала технологии зондирования ионосферы можно условно разделить на приземные («снизу - вверх») и спутниковые («сверху - вниз», сюда входит и радиозатменное зондирование). Зондирование «снизу - вверх» обычно реализуется над сушей и обычно ограничивается высотами основного F2-слоя ионосферы. Для мониторинга ионосферы над океанами обычно используются спутниковые технологии зондирования и модели ионосферы. При этом, не достижимы требования Всемирной метеорологической организации к мониторингу ионосферы. Установка станций ионосферного зондирования на корабли, как попытка решения этой проблемы, - сложная техническая задача, а результаты такого зондирования не рентабельны. Необходимы новые технические решения.
Во всех технологиях зондирования ионосферы используются физические основы, определяющие изменение характеристик радиосигналов в ионосфере и в тропосфере из-за уменьшения фазовой скорости радиоволн, поляризации молекул водяного пара в магнитном поле Земли [1]. Набег фазы при распространении сигнала в неидеальной среде определяется протяженностью траектории L распространения сигнала между приемником и передатчиком и коэффициентом преломления среды n [2]:
где, ϕ - набег фазы для рабочей частоты f сигнала, nl - коэффициент преломления сигнала вдоль трассы прохождения сигнала, ϕ0 - некоторая неизвестная начальная фаза сигнала, с - скорость света.
В ионосфере, если пренебречь малым влиянием соударений частиц среды и магнитного поля [1, 2]:
где nе - локальная концентрация электронов.
В тропосфере показатель преломления радиоволн не зависит от частоты [1, 3]:
nТр=1+K1(P - e)/T+K2e/T+K3e/T2, (3)
где K1-3 - эмпирические коэффициенты,
Р - атмосферное давление,
Т - температура воздуха, К,
е - парциальное давление водяного пара, Па.
С учетом показателей преломления радиоволн в ионосфере, оценок задержек принимаемых сигналов и координат приемника и передатчика на КА предложены решения в патенте РФ № 2042129 «Ионосферный зонд», патенте РФ на полезную модель № 76462 по заявке РФ 2010105905 от 19.02.2010 г. на аппаратно-программный комплекс ионосферного мониторинга, а для зондирования характеристик тропосферной задержки - в [3]. Недостатки этих решений учтены в патенте № 2502080 [1], где предложен способ зондирования ионосферы, тропосферы и геодвижений по схеме «сверху - вниз» на основе данных, получаемых с сети навигационных приемников сигналов GPS/ГЛОНАСС/Galileo, данных ионозондов наземного и космического базирования, учет тропосферных задержек в характеристиках GPS/ГЛОНАСС/Galileo-сигналов и сигналов с геостационарных КА, погрешностей в расчетах профилей концентрации заряженных частиц и относительных оценок ПЭС, качества моделей ионосферы и тропосферы, верификация и валидация алгоритмов, контроль и поверки предложенного к использованию оборудования. Однако [1], как основной прототип предлагаемого способа зондирования ионосферы и тропосферы, но по схеме радиопросвечивания «сверху-вниз», характеризуется информационной избыточностью, к тому же зондирование ионосферы и тропосферы не является задачей ГНСС, поэтому наземное приемное оборудование сигналов ГНСС - навигационные приемники используются в схеме зондирования ионосферы не по прямому назначению, дороги, требуют сложного программного обеспечения и значительных эксплуатационных расходов. Альтернативно разрабатываемые специализированные проекты космических систем для зондирования ионосферы не рентабельны и используют также схему зондирования «сверху - вниз».
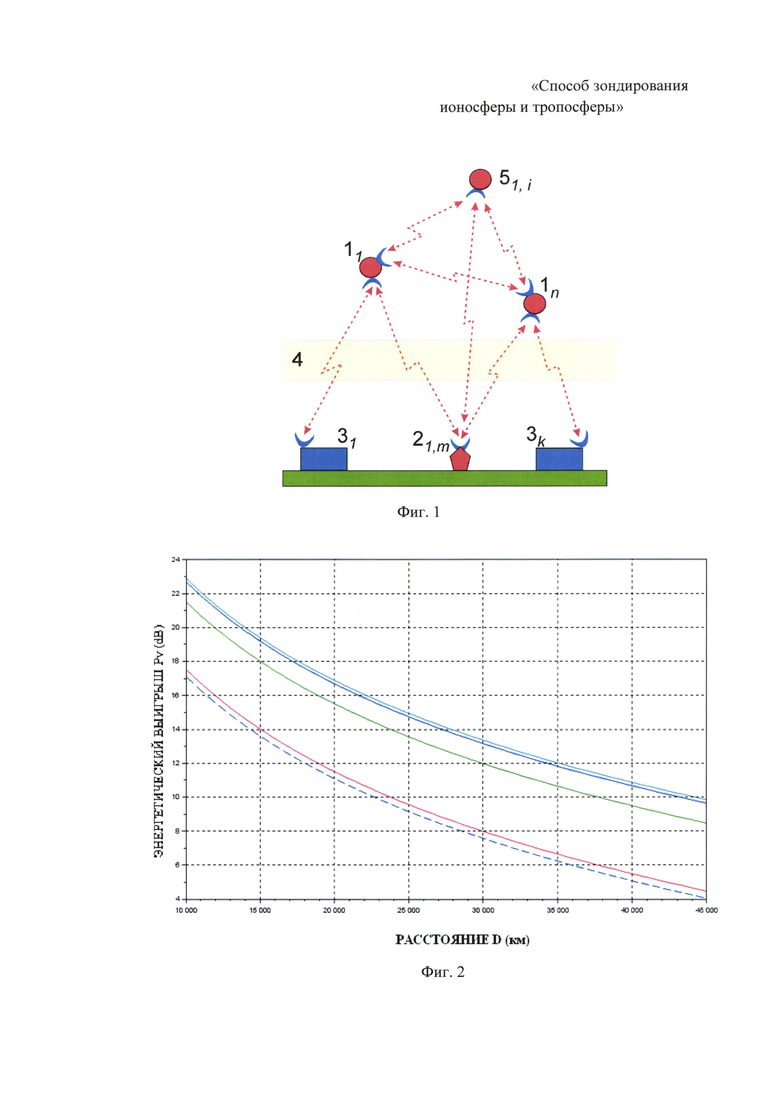
Чтобы повысить рентабельность зондирования ионосферы, особенно над обширными пространствами океанов, целесообразно использовать схему радиопросвечивания ионосферы «снизу - вверх» с источником просвечивающих ионосферу радиосигналов (далее радиомаркером) у поверхности Земли или в атмосфере и приемником сигналов с антенной на космических аппаратах. Предлагаемая схема зондирования показана на фиг. 1, где:
11…1k - группировка КА, принимающих сигналы радиомаркеров через бортовые антенные устройства;
21…2n - приземные радиомаркеры с антенным устройством и блоком энергообеспечения;
31…3n - станции приема, обработки и передачи спутниковых данных;
4 - слой ионосферы;
51…5i - КА ГНСС и геостационарные КА, которые также могут быть оснащены приемниками сигналов радиомаркеров.
Радиомаркер должен быть оснащен блоком питания и антенной, хронизатором, что в целом на порядки дешевле используемых в прототипе профессиональных геодезических приемников. Это приближает радиомаркер к категории расходных инструментов, что особенно актуально для обширных и труднодоступных территорий. Корпус радиомаркера должен обеспечивать сохранность блока энергопитания, приемовычислителей и антенн от воздействий природной среды.
Антенные устройства для приема сигналов радиомаркеров представляют собой одну или несколько антенн с малошумящим усилителем (МШУ), переходником для подсоединения к высокочастотному кабелю, через который обеспечивается также питание МШУ. По уровню принимаемого сигнала происходит предварительная фильтрация принимаемых сигналов, например на переход из спящего в рабочий режим схемы зондирования, их последующая идентификация и контроль полноты кодовых принимаемых последовательностей. При установке антенн предусматривается обзор в выбранных секторах.
Отличительной особенностью радиомаяка - источника синхронизированных по времени сигналов - прошитый в структуре его сигналов идентификационный индекс. Задержка принимаемой приемником на КА кодовой последовательности индекса на не менее двух частотах (f1 и f2) позволяет оценить концентрацию заряженных частиц в ионосфере ПЭС=I0 [1] по траектории зондирования в соответствии с (2):
 (4)
(4)
где L1 - число оборотов фазы по радиолучу на частоте f1 принимаемого сигнала с длиной волны λ1=с/f1, const1 и σL1 - константы.
L1λ1 и L2λ2 можно заменить соответствующими значениями оценок псевдодальности до приемника на КА.
Константы оцениваются в результате экспериментов, могут задаваться в технической документации, рассчитываться с помощью модели ионосферы, по эталонным сигналам, по данным наземных и космических ионозондов.
Для расчетов ПЭС в вертикальном столбе необходима коррекция на наклон видимого КА:
I зенит(t, φ, λ) = I0(t, φ, λ) 
где α - зенитный угол направления на КА, Нионосф - высота ионосферного слоя (который, обычно, задается в предположении тонкого слоя), RЗ - радиус Земли, t - время, ϕ - широта, λ - долгота радиомаркера.
Радиопросвечивание ионосферы в предлагаемом способе возможно и на одной частоте, но это сложнее в информационном отношении и снижает оперативность получения конечных результатов зондирования. К тому же псевдодальности (мгновенные оценки расстояний) между радиомаркером и приемников на КА, рассчитываемые по одночастотной схеме, сильно зашумлены. Поэтому для получения адекватных оценок необходим длительный анализ принимаемых сигналов, что критично для оперативного зондирования ионосферы, учитывая ее быструю изменчивость.
Для повышения точности определения ПЭС необходимо использовать сигналы на не менее двух разнесенных частотах, большие углы излучения сигналов радиомаркера, среднюю аддитивную или среднюю геометрическую оценки ПЭС или их комбинации по используемым в расчетах частотам и видимым приемникам на КА в зоне излучения радиомаркера.
Одним из ставших традиционным решением обеспечения функцией хронизатора (датчика точного времени), в том числе для предлагаемой схемы зондирования ионосферы и тропосферы, является, например, технология привязки к точному времени Глобальных навигационных спутниковых систем (ГНСС). Их КА тоже могут быть использованы для размещения приемной аппаратуры сигналов радиомаркеров. Однако, как показали расчеты, использование орбит этих КА, как и на геостационарах, повышает необходимую мощность излучения радиомаркера до 15-20 Вт, по сравнению использованием в схеме зондирования КА на низких орбитах, где, например, для передачи на орбиты КА подвижной спутниковой связи типа «Гонец» требуется мощность приземного радиомаркера около 1 Вт. Следствием повышения мощности излучения является уменьшение автономности радиомаркера, обеспечиваемого электроэнергией от аккумуляторов и/или солнечных батарей.
Приемные устройства на КА, принимающие через антенные устройства сигналы подионосферных радиомаркеров, формируют поток информации в бортовых приемо-вычислителях КА с последующей ретрансляцией полученных результатов через бортовые системы связи, хранения и передачи данных в пункты приема обработки и хранения информации или через геостационарные КА, как, например, в системе «Луч». Установленные на КА многочастотные навигационные приемники сигналов ГНСС позволяют решать задачу зондирования внешней ионосферы и затменного зондирования.
Следует отметить, что для схемы зондирования «сверху-вниз» в [4] были предложены варианты использования полярных ионосферных КА на высокоэллиптических орбитах с бортовыми ионозондами для мониторинга полярной ионосферы, что, по мнению авторов, должно потенциально обеспечить наибольшую точность определения основных параметров ионосферы (f0F2, hmF2), поскольку критическая частота дает улучшение результатов адаптации международной модели ионосферы (IRI) на 30-60% по сравнению с долгосрочным прогнозом. В [5] заявлено, что параметр hmF2 может обеспечить повышение на 15-20%, МПЧ в среднем до 40%, ПЭС - в среднем до 30%. Однако, учитывая размеры зон Френеля зондирующих сигналов в данной схеме зондирования с высокоэллиптических орбит, игнорирование морфоструктурных особенностей полярной ионосферы и ее изменчивости, переход от климатической модели ионосферы IRI к адаптируемой модели ионосферы SIMP2, серьезные сомнения в технической реализуемости данной схемы зондирования указанные оценки повышения качества зондирования ионосферы можно отнести к популистским.
Основным недостатком вариантов зондирования по схеме «сверху-вниз» является значительный энергетический потенциал канала и сложность интерпретации ионограмм внешнего зондирования (СВЗ) с высоких орбит, особенно для неоднородной и нестационарной полярной ионосферы. При этом игнорируется ее морфология. Ограничение по энергетике канала зондирования предлагается устранить за счет использования сложных сигналов и их накопления при СВЗ, либо за счет применения трансионосферного зондирования (ТИЗ). Но это усложняет технологию зондирования, так как получение ионограмм СВЗ энергозатратно, что критично для энергообеспечения КА, кроме того, возникают трудности по электромагнитной совместимости (ЭМС) на борту КА, что, при накоплении сложных сигналов, значительно удлиняет сеанс зондирования, снижая тем самым оперативность мониторинга ионосферы.
При приеме сигналов приземного радиомаркера на КА энергетика канала обеспечивается за счет наземного передатчика, кроме того, не требуется использование сложных сигналов. Пассивный приемник не нарушает требований ЭМС, упрощается «привязка» хронизатора приемника по времени и эфемеридам, характеристики принятых сигналов могут быть переданы по служебным каналам связи. Кроме того, при ограничении частотного диапазона более частоты отсечки сигнала ионосферой уменьшаются габариты приемной антенны.
Техническим результатом заявленного способа является повышение рентабельности и оперативности мониторинга ионосферы и тропосферы.
Радиосигналы радиомаркера представляют собой промодулированную кодом несущую частоту. В коде предусмотрены служебные метки, метки индекса радиомаркера, дополнительные данные с выхода приемовычислителя радиомаркера. Сигналы синхронизованы по времени на разнесенных дискретных частотах. По разности времени поступления связанных с хронизатором служебных меток, которые могут быть связаны с индексом радиомаркера, рассчитывается кодовая и фазовая задержки принятых сигналов, используемых в дальнейших расчетах состояния ионосферы и тропосферы. Возможна схема передачи индекса радиомаркера на одной частоте, а на другой дополнительных данных с выхода приемовычислителя радиомаркера.
Излучение сигналов радиомаркера ориентировано в верхнюю полусферу или в конус в ней, в соответствии с результатами расчета характеристик излучения и типа антенны.
Попадание приемника КА в конус излучения радиомаркера является необходимым условием для зондирования тропосферы и ионосферы. Географическая привязка радиомаяка при современном сервисе ГНСС не представляет сложности. При этом, наличие встроенного в радиомаркер приемника сигналов ГНСС позволяет реализовать функции, заявленные в прототипе, а рассчитанное время прихода принятых через антенны сигналов ГНСС передается через контроллеры в систему хранения данных радиомаркера и передачи данных на КА.
Бортовой приемовычислитель КА (приемник) рассчитывает время прихода принятых через антенны и синхронизованных по времени излучения сигналов радиомаркеров, и через контроллеры передает задержки принятых сигналов в бортовую систему хранения и передачи данных. Передаваемые с КА данные принимаются в наземных пунктах приема и обработки информации или через геостационарные КА и используются для подготовки специализированных информационных продуктов. Положение КА относительно радиомаяка рассчитывается на основе моделей движения, либо по данным специализированной рассылки.
Предлагаемый способ существенно упрощает обработку данных, так как передаваемые данные содержат идентификатор радиомаркера и время задержки сигнала в установленное время, а при использовании в радиомаркере встроенного приемника сигналов ГНСС возможна передача данных о состоянии ионосферы и тропосферы. По сравнению с объемом обычной телеграммы ГНСС, используемой в прототипе, экономия в объеме передаваемой и обрабатываемой информации может достичь двух порядков.
Полученная информация легко интегрируется в существующую систему мониторинга ионосферы. А в случае использования автономных радиомаркеров позволяет расширить территорию зондирования над океанами и труднодоступными районами Земли.
Бортовой приемник сигналов радиомаркера на КА должен быть настроен на прием основных рабочих частот радиомаркера и обеспечиваться питанием от бортовой сети или автономного источника. Сигналы радиомаркеров принимаются антенными устройствами, усиливаются, фильтруются и поступают на электронную плату приемника, где сигналы усиливаются, фильтруются и преобразуются в цифровой код. Приемник сигналов радиомаркера обеспечивает автоматическое непрерывное в реальном масштабе времени определение и выдачу оценок задержки принятых сигналов в установленном формате, возможность накопления данных и их передачу по выделенным линиям в бортовую систему передачи данных.
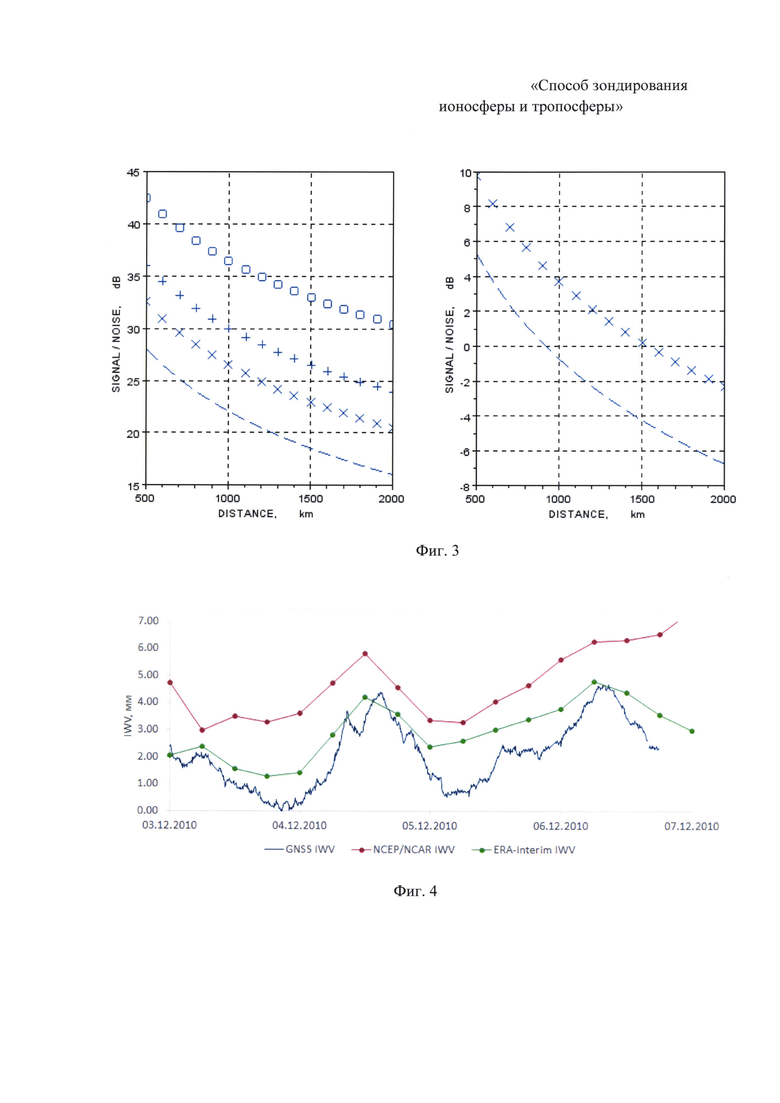
Пример расчета энергетического потенциала канала связи Pv при ОТИЗ для орбит высотой от 10 до 40 тыс км представлен на фиг. 2 [6].
Расчеты подтверждают превышение сигнала над помехой до 6-10 дБ для расстояний между приемником и радиомаркером превышающих 40 000 км. Но для реализации этой схемы требуется значительная мощность излучения импульсов. Например, в декаметровом (HF) диапазоне - до 10 - 20 кВт в импульсе. Это критично для ЭМС КА. Поэтому для снижения мощности источника излучения используются частоты в сотни и тысячи МГц.
Реалии используемой в предлагаемом способе основной схемы зондирования «снизу-вверх» на КА могут подтвердить результаты давних экспериментов по зондированию ионосферы с КА «Интеркосмос-19» по схеме «сверху-вниз». Но этот масштабный эксперимент больше не повторялся, в том числе из-за проблем с ЭМС (доказано при попытке установки ионозонда на МКС) и высоких энергозатрат.
Тенденцию использования ГГц диапазона для снижения мощности источника излучения подтверждают расчеты характеристик связи, представленные на фиг. 3 для мощности наземного излучения в 1 Вт и частот 250 Мгц (для характеристик, близких к требованиям ретранслятора КА типа "Гонец"), 1000, 1500 и 2500 МГц (для условий телеметрии).
Предполагается модуляция кодово-импульсная модуляция на основе фазовой модуляции с полосой излучения 20 кГц, коэффициентом шума приемника 2,5 дБ. Потери в атмосфере, включая ионосферу, - 0,01-0,1 дБ. В расчетах использовано предположение об антеннах - диполях с 2 дБ потерей излучения и 3 дБ по поляризации, и спирально-конических антенн с усилением 12 дБ и потерями на поляризацию 0 дБ.
Таким образом, даже с простейшими антеннами и мощностью передатчика приземного радиомаркера в 1 Вт возможна связь с КА на выбранных частотах примерно до высоты 1000 км. Необходимый запас по энергетике канала около 20 дБ получается при улучшенных антеннах. Но это дороже.
Многочастотное радиопросвечивание ионосферы позволяет почти полностью нивелировать ионосферную ошибку и получить оценку тропосферной задержки зондируемых сигналов, не зависящей от их частоты. Задержка радиосигнала, связанная с прохождением через тропосферный слой, может быть определена по формуле [1]:

где
L - расстояние до спутника, м,
l - путь вдоль траектории радиолуча в тропосфере, м,
nТр - показатель преломления радиоволн в тропосфере (3).
Для расчета показателя преломления радиоволн в тропосфере используются метеоданные, справочные модели атмосферы. Обычно определяется осредненный nТр показатель преломления радиоволн у земной поверхности, который используется при оценке суммарной поправки тропосферной рефракции. На основе рассчитанных значений производится расчет характеристик тропосферной рефракции сигналов радиомаркера для коррекции полученных оценок ПЭС в ионосфере.
В расчетах обычно используют аддитивное представление плотности воздуха из плотности его сухой части и плотности водяного пара (ρ=ρс+ρп):
nТр=1+K1ρс+K2Rпρп+K3Rпρп /T, (7)
где Rc = 287,0538, Дж/(кг К), Rп= 461,526, Дж/(кг К) - универсальные газовые постоянные сухого воздуха и пара, K1,2,3 - коэффициенты [1-3].
«Сухая» часть тропосферной задержки составляет около 90% от полной тропосферной задержки «Влажная» часть зависит от свойств воздушной массы и ее влагосодержания. «Сухая» часть тропосферной задержки достаточно точно определяется по метеоданным, данным радиозондирования аэрологических станций вблизи приемника, а также с использованием гидростатического закона (dP=ρсgdz) убывания давления (Р) с высотой. В расчетах могут использоватся модели стандартных атмосфер, например в расчетах ослабления радиосигналов в атмосферных газах на трассах Земля-космос. Модели давления, температуры и влажности используются в случаях, когда надежные данные измерений отсутствуют.
В тропосфере [2, 7, 8]:
где ZTD - зенитная тропосферная задержка [м], Gn и Ge - северный и восточный градиентные параметры [м], m и mG - картирующие функции, A и α - азимут и зенитный угол спутника.
Гидростатическая часть задержки (ZHD) часто определяется с помощью аналитических моделей, среди которых активно используется модель Саастамойнена [9]:
 , (9)
, (9)
где K1 = 77.60, К/гПа в (3); Rd = 287 Дж⋅кг-1⋅К-1 - удельная газовая постоянная сухого воздуха; Ps - приземное давление на станции, гПа; g0 = 9.784 м/с2 - ускорение свободного падения в центре масс атмосферного столба на экваторе; B и H - широта (град) и высота (км) станции.
Разность между зенитной тропосферной задержкой и гидростатической компонентой позволяет определить влажную составляющую ZWD зенитной тропосферной задержки, которая пересчитывается в интегральное содержание влаги в столбе атмосферы (IWV, мм) [10-12]:
 , (10)
, (10)
где ρw = 1000 кг/м3 - плотность жидкой воды; Rw = 461.5 Дж⋅кг-1⋅K-1 - удельная газовая постоянная водяного пара; K2 = 71.2952 К/гПа, K3 = 375463 K2/гПа; Tm - средневзвешенная по упругости водяного пара температура атмосферного столба (0, К). Последняя определяется с помощью регрессионного выражения с данными приземной температуры Ts (0, К) [13]:
Тm=50,4+0,789Ts. (11)
Оценка точности полученных таким образом оценок ZTD для ряда районов, основанная на СКО остаточных разностей, составляет около 1.5 мм. С учетом точности моделей для ZHD и Tm, точность IWV оценивается примерно в 0.55 мм осажденной воды [14].
Для проверки алгоритма расчета и полученных оценок IWV использовались эксперименты в Нальчике [14] (преимущественно для сильных ливневых осадков) и эксперименты в Казахстане в районе космодрома Байконур. Для проверки полученных результатов использовалось сравнение с данными об интегральном содержании водяного пара NCEP/NCAR Национального Управления Океанических и Атмосферных Исследований (NOAA, США) и ERA-Interim Европейского Центра Среднесрочного Прогнозирования. При этом выполнялась линейная интерполяция значений IWV от четырех ближайших к Байконуру узлов сетки.
На фиг. 4 представлен пример результатов расчета для 3-6.12.2010 г. Другие эксперименты показали аналогичное завышение оценок интегрального влагосодержания в столбе атмосферы по данным зарубежных центров, но это известный факт [15]. Геомагнитная обстановка в указанных временных отрезках была спокойной. Солнечных вспышек не было.
Кроме того, данные зарубежных центров не удовлетворяют требованиям Всемирной Метеорологической Организации к точности определения IWV (10%) [16]. А используемое программное обеспечение [12-14] требует доработки для подвижного варианта зондирования.
При решении обратной задачи зондирования можно по данным о характеристиках сигналов ГНСС получать профили распределения влажности по высоте и по пространству, например на основе ГОСТ 26352-84 (с уточнениями 2017 г.), определяющим модель влажности в Северном полушарии Земли. Модель влажности в ГОСТ 26352-84 представлена от уровня моря до высоты 10 км по нескольким характеристикам. Характеристики влажности воздуха, принятые в стандарте, соответствуют международному стандарту ИСО5878/Д-2. Для расчетов в южном полушарии Земли необходимо формировать адаптивные модели профиля влажности, использовать известные модели, например известную модель А.Х. Хргиана с экспоненциальным уменьшением влажности с высотой в тропосфере. Подобные модели позволяют сформировать начальное приближение при итерационном подборе соответствия полученного в расчетах значения IWV и интеграла влагосодержания по модели ГОСТ 26352-84. Это задача центров приема и анализа данных зондирования ионосферы и тропосферы.
Для восстановления профиля изменения по высоте n(h) по серии измерений задержек сигнала формируют систему уравнений:
X
где Y - матрица результатов измерений задержек сигнала по траектории радиолуча в тропосфере c элементами 
Х - матрица показателя преломления в тропосфере с элементами (ni-1) по слоям (обычно используется приближение сферической симметрии слоев),
А - оператор прямой задачи или матрица преобразования (ядро уравнения, например, в виде фильтра Калмана [17]), с элементами:
aij=
где wi - квадратурные веса на i-м уровне,
R - радиус Земли, м,

n0 - обобщенный показатель преломления радиоволн по всей трассе и у земной поверхности.
Элементы (13) могут рассчитываться с помощью метода сопряженных градиентов или с помощью построения уравнения авторегрессии. При этом решается обратная некорректная задача атмосферной рефракции, которая имеет приближенное решение на основе математического аппарата решения интегральных уравнений Фредгольма первого рода [17, 18] и нахождения конечномерного вектора, минимизирующего функционал:

где 

Искомая совокупность 
Из восстановленного профиля n(h) может быть рассчитан вертикальный профиль влажности воздуха и вертикальный профиль плотности воздуха с использованием предположения политропной модели атмосферы, где температура с высотой убывает по линейному закону, а атмосферное давление убывает по барометрическому закону.
При решении обратной задачи определения искомого вектора X (профиля показателя преломления n(h)) по данным задержки радиосигналов может применяться метод статистической регуляризации. При этом решение получается также в результате итерационного процесса:
xs=xb + [AT

где xb - начальное приближение вектора Х,
Ку - матрица ошибок измерений значений 


s - номер итерации,
Rx - матрица значений межуровенной корреляции (стабилизации) показателя преломления радиоволн:
Rx = 


где RТ, RР, Rе - матрицы ковариации полей температуры, атмосферного давления и влажности воздуха [18].
Для начальных приближений при отсутствии аэрологических данных можно использовать профиль относительной влажности основе ГОСТ 26352-84 (с уточнениями 2017 г.).
Точность решения обратной задачи зависит от качества задания корреляционных функций.
Другой способ восстановления вертикальных профилей связан с использованием вариационного метода. При этом необходимо найти такой вектор X, при котором достигается минимум функции потерь как и в (14):

где Х - оценка вектора профиля состояния атмосферы [19].
Для реализации этого метода также необходим большой архив реально наблюдавшихся вертикальных профилей показателя преломления.
По восстановленному вертикальному профилю показателя преломления можно восстановить профиль влажности, например, задав вертикальный профиль температуры воздуха. Вертикальное распределение атмосферного давления может быть получено из предположения о гидростатическом профиле плотности воздуха. Эти вопросы не рассматривались в [20].
Ряд продолжительных наблюдений за характеристиками сигналов радиомаркеров и полученные при этом оценки ПЭС, скорректированные на ошибки тропосферной рефракции, могут использоваться для восстановления вертикальных профилей электронной концентрации в ионосфере (nе(h)) на основе решения обратной некорректной задачи атмосферной рефракции. Набор вертикальных профилей может быть интерполирован в вертикальный разрез зондируемых характеристик ионосферы и тропосферы.
Основой технологии решения обратной задачи радиопросвечивания в предлагаемом способе выбрано решение задачи нахождения конечномерного вектора, минимизирующего функционал:

где 
приближения 

Начальное приближение профиля концентрации заряженных частиц задается из климатических моделей ионосферы, которые необходимо подстраивать под конкретный регион. В последующих приближениях реализуется итерационная процедура с использованием предыдущих профилей. При формировании начального приближения учитывается тропосферная задержка. В случае появления в расчетах некорректных результатов моделирования предусмотрена фильтрация результатов по предыдущим приближениям. Кроме того, производится осреднение рассчитанных профилей, что повышает устойчивость и надежность расчетов. Для повышения точности зондирования необходима региональная модель ионосферы на основе данных наблюдений.
Программное обеспечение для реализации предложенного способа целесообразно выполнить серверных приложений и коммуникационной сети на основе Интернет-связи, оптоволокна, линий радиосвязи. Программный комплекс для восстановления профилей электронной концентрации в ионосфере по сигналам радиомаркеров и характеристик тропосферной задержки должен включает блоки тематических программ для:
1. Управления и планирования приемом сигналов;
2. Идентификации и контроля полноты кодовых последовательностей в принимаемых сигналах;
3. Оценки характеристик принятых сигналов;
4. Расчета полной электронной концентрации в ионосфере и поля распределения полного электронного содержания в ионосфере;
5. Расчета поля распределения интегрального влагосодержания в столбе атмосферы;
6. Формирования матрицы начальных и модельных приближений профиля концентрации заряженных частиц в ионосфере, вертикального профиля влажности воздуха и вертикального профиля плотности воздуха в тропосфере над пунктом зондирования на основе региональной модели атмосферы;
7. Формирования региональных моделей ионосферных и тропосферных характеристик и ведения архивов;
8. Расчета профилей влажности и плотности в тропосфере;
9. Построения и анализа графиков и карт;
10. Диагностики аномалий в контролируемых характеристиках;
11. Вывода на устройство отображения результатов зондирования ионосферы и тропосферы.
Упрощенный алгоритм радиопросвечивания ионосферы и тропосферы заключается в том, что сигналы радиомаркера принимаются с помощью антенного устройства на КА, включающего одну или несколько антенн. КА могут быть оснащены также приемниками сигналов ГНСС. На выходе антенн принятые сигналы радиомаркера и от КА ГНСС усиливаются, фильтруются, преобразуются в цифровой код и представляются в установленном формате для последующей обработки. Сравнивается значение отношения сигнал/шум с пороговым значением, если оно меньше заданного, то через установленное время задержки происходит переключение приемных антенн в режим ожидания нового задания. Для бортовых приемников управление антеннами может реализовываться по командам через станцию приема-передачи спутниковых данных или автоматически по принятому сигналу радиомаркера. Принятые сигналы идентифицируются по времени поступления, кодовых индексов и частоте. Эта информация передается на наземные пункты приема и обработки информации, где производится фильтрация видимых КА с приемниками по их положению над горизонтом и относительно зенита, производится расчет эффектов тропосферной рефракции, и оценок ПЭС, профилей концентрации заряженных частиц в ионосфере с последующими процедурами фильтрации, осреднения, архивации и картированием результатов.
В наземных пунктах приема и обработки информации в режиме реального времени производится формирование массивов измерений для восстановления оценок ПЭС, профилей концентрации заряженных частиц в ионосфере и характеристик тропосферной задержки сигналов радиомаркеров. Для начального приближения восстанавливаемых профилей при решении обратной задачи моделирования используются данные моделей ионосферы, тропосферы с оперативной коррекцией по результатам метеорологических и аэрологических наблюдений, результаты предыдущих расчетов, профили, полученные при радиопросвечивании атмосферы наземными и космическими ионозондами. После проведения итерационных приближений и проверки полученных результатов на соответствие заданным погрешностям, производится фильтрация, осреднение, представление,
архивация и картирование полученных результатов, а также анализ выбросов, трендов, в том числе по координатам приемных антенн.
При дополнительной установке в радиомаркере приемовычислителя сигналов ГНСС на не менее двух частотах реализуется схема зондирования ионосферы и тропосферы по используемому прототипу с передачей полученных данных в структуре радиосигналов на КА.
Установка приемников сигналов ГНСС на КА в предлагаемой схеме зондирования позволяет зондировать характеристики внешней ионосферы и осуществлять радиозатменное зондирование атмосферы при наличии антенного комплекса с ориентацией антенн на горизонт.
Предлагаемый способ может быть реализован в подвижном или в стационарном варианте в отношении радиомаркера.
Перечень чертежей
Фиг. 1. Схема зондирования: 1 - КА с приемниками, 2 - радиомаркеры, 3 - пункты приема и обработки информации, 4 - ионосфера, 5 - КА ГНСС и геостационарные КА.
Фиг. 2. Изменение энергетического потенциала канала связи Pv при ОТИЗ для орбит высотой от 10 до 40 тыс км. Красная линия - для частоты 5 МГц, зеленая - для частоты 10 МГц, синяя - для частоты 15 МГц, голубая - для частоты 20 МГц, пунктирной кривой показан уровень помех от радиовещательного передатчика 21 метрового диапазона мощностью 50 кВт на высотах КА.
Фиг. 3 Оценки энергетического канала связи для двух типов антенн на Земле на орбите КА для сигналов приземного радиомаркера с мощностью излучения в 1 Вт. Ось абсцисс - удаление (км), ордината - соотношение Сигнал/ Шум (дБ). (о) - частота 250 МГц, (+) - 1000 МГц, (х) - 1500 МГц, (--) - 2500 МГц.
Левый фрагмент для усиления антенн на Земле и на борту 12 дБ (направленная спираль), потерь в фидерах - 1 дБ, поляризационных потерь - 0 дБ:
Правый фрагмент для усиления антенн на Земле и на борту 2,1 дБ (направленный диполь), потерь в фидерах - 1 дБ, поляризационных потерь - 3 дБ.
Фиг. 4 Результаты расчета интегрального влагосодержания в столбе атмосферы по сигналам ГНСС и по данным из зарубежных архивов.
Список литературы:
1. Тертышников А.В., Пулинец С.А. Способ зондирования ионосферы, тропосферы, геодвижений и комплекс для его реализации / Патент, заявка №2011128236 от 07.07.2011 на получение патента РФ на изобретение. Бюллетень Изобретения. 2013, № 4. Решение о выдаче патента РФ на изобретение от 01.02.2013
2. Афрамович Э.Л., Перевалова Н.П. GPS-мониторинг верхней атмосферы Земли. - Иркутск: ГУ НЦ РВХ ВСНЦ СО РАМН, 2006. 480 с.
3. Чукин В.В., Алдошкина Е.С., Вахнин А.В. и др. Мониторинг интегрального содержания водяного пара в атмосфере ГНСС-сигналами // Ученые записки РГГМУ. 2010. №12. С. 51-60.
4. Крашенинников И.В. Анализ типов зондирующих сигналов в задаче ионосферного зондирования и критерии эффективности использования космических систем для проведения трансионосферного мониторинга в Арктике.//Гелиогеофизические исследования, Выпуск 14, 2016, с. 53-62.
5. Полтавский О.С. Методы обеспечения КВ-трасс информацией о состоянии ионосферы. Автореферат диссертации на соискание ученой степени кандидата физико-математических наук по специальности 01.04.03 - Радиофизика, Ростов-на-Дону. 2009.
6. Ivanov I.I. Ionospheric monitoring in the Arctic at reverse transionospheric sounding // Conference Proceedings - 2017 Radiation and Scattering of Electromagnetic Waves, RSEMW 2017. Publisher: IEEE, 9 November 2017. Article number 8103582. pp. 118-120. DOI: 10.1109/RSEMW.2017.8103582.
7. Niell A.E. Global mapping functions for the atmosphere delay at radio wavelengths, J. Geophys. Res.-Sol. Ea., 1996, 101, P. 3227-3246.
8. Bevis M., Businger, S., Chiswell, S., Herring, T.A., Anthes, R.A., Rocken, C., Ware, R.H. GPS meteorology: mapping zenith wet delays onto precipitable water, J. Appl. Meteorol., 1994, 33, 379-386.
9. Saastamioinen J. Contributions to then theory atmospheric refraction. Part II. Refraction corrections in satellite Geodesy, B. Geod., 1973, 107, P. 13-34.
10. Askne J. and Nordius H. Estimation of tropospheric delay for microwaves from surface weather data, Radio Sci., 1987, 22, 379-386.
11. Kalinnikov, V.V., Khutorova, O.G., Teptin, G.M. Influence nonuniformity of the atmospheric water vapor field on the phase measurements of radio signals from global navigation satellite systems, Radiophysics and Quantum Electronics, 2013, Vol. 56, №2, P. 96-103.
12. Kalinnikov, V.V., Khutorova, O.G. Diurnal variations in integrated water vapor derived from a GPS ground network in the Volga-Ural region of Russia, Ann. Geophys., 2017, Vol. 35, P. 453-464.
13. Mendes V.B. Modeling the neutral-atmospheric propagation delay in radiometric space techniques, Tech. Report № 199. - New Brunswick, Canada, 1999, 353 p.
14. Тертышников, А.В., Калинников В.В., Удриш В.В. Возможности использования станции приема сигналов ГНСС ФГБУ «ВГИ» в Нальчике для мониторинга интегрального содержания водяного пара в атмосфере/ Доклады Всероссийской конференции по физике облаков и активным воздействиям на гидрометеорологические процессы, Нальчик, ВГИ, 23-27 октября 2017 г. - Нальчик, ВГИ, 2017. С. 225-228.
15. Солдатенко С.А., Тертышников А.В., Ширшов Н.В. Технология оценивания влияния данных ДЗЗ на качество численных прогнозов погоды// гелиогеофизические исследования. 2014. вып. 10. С. 106 - 112.
16. Guide to meteorological instruments and methods of observation. - Geneva, 2008, 681 p.
17. Тихонов А.Н., Арсенин В.Я. Методы решения некорректных задач. - М.: Наука, 1986.
18. Обрезкова И.В. Использование межуровенных корреляционных связей метеорологических полей для уточнения расчетов содержания водяного пара в атмосфере // Успехи современного естествознания. 2010. №8. С. 9-10.
19. Eresmaa R. Exploiting ground-based measurements of the global positioning system for
20. numerical weather prediction // Finnish Meteorological Institute Contribution. 2007. № 61. 140 p.
21. Азизов А.А., Гайкович К.П., Кашкаров С.С., Черняева М.Б. Использование сигналов навигационных ИСЗ для определения параметров атмосферы // Известия ВУЗов. Радиофизика. 1998. Т.41, №9. C. 1093-1116.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2015 |
|
RU2601387C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ПЛАЗМЕННОГО СЛОЯ ГЕОМАГНИТНОГО ХВОСТА И ИОНОСФЕРЫ ЗЕМЛИ | 2017 |
|
RU2656617C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2018 |
|
RU2683113C1 |
| СПОСОБ ЗОНДИРОВАНИЯ СЕЙСМООРБИТАЛЬНЫХ ЭФФЕКТОВ И ВАРИАЦИЙ ПЛОТНОСТИ ВЕРХНЕЙ АТМОСФЕРЫ | 2019 |
|
RU2705161C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
| Способ зондирования лунного грунта | 2017 |
|
RU2667695C1 |
| Способ зондирования ионосферы и устройство для его реализации | 2020 |
|
RU2764782C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМУЩЕНИЙ ИОНОСФЕРЫ, ВЫЗВАННЫХ ЗАПУСКАМИ КОСМИЧЕСКИХ АППАРАТОВ | 2016 |
|
RU2624911C1 |
Изобретение относится к геофизике и предназначено для мониторинга природной среды, информационного обеспечения радиосвязи и навигации. Технический результат состоит в проведении зондирования внешней ионосферы с низких орбит КА, используемых в предложенной схеме, и обеспечивает повышение рентабельности и оперативности мониторинга ионосферы и тропосферы. Для этого полученная с радиомаркеров информация легко интегрируется в существующую систему мониторинга ионосферы и позволяет расширить территорию зондирования ионосферы и тропосферы над океанами и труднодоступными районами Земли. В алгоритме расчета характеристик тропосферной рефракции предложена схема расчета интегрального влагосодержания в атмосфере и профилей влажности в атмосфере. 1 з.п. ф-лы, 4 ил. 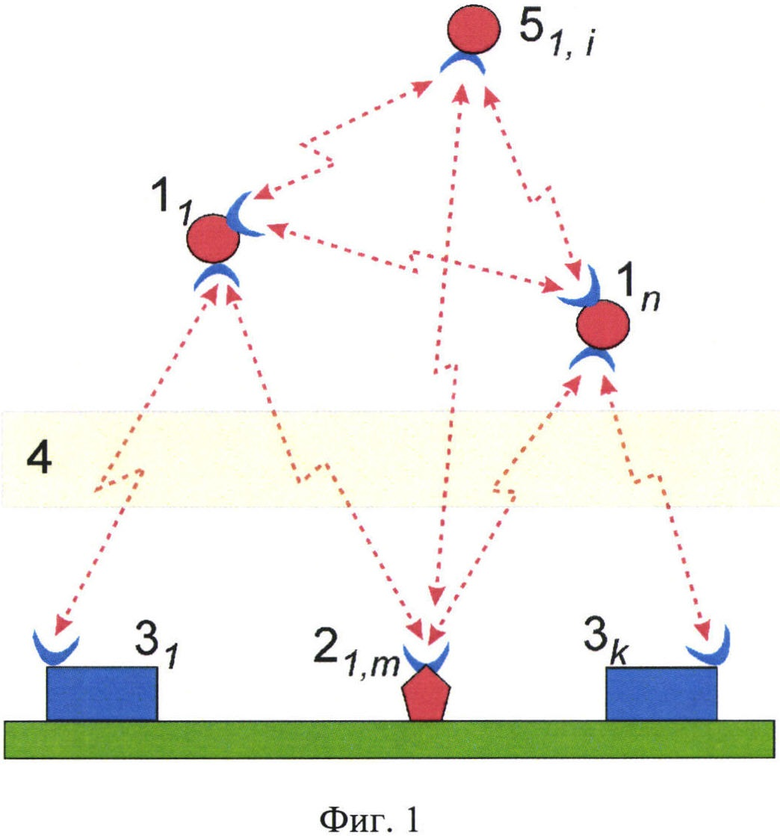
1. Способ зондирования ионосферы и тропосферы, заключающийся в излучении в ионосферу и тропосферу зондирующих радиосигналов, синхронизированных по времени на не менее двух частотах, приеме радиосигналов через антенное устройство, анализе изменения фазовых, частотных и временных характеристик принятых сигналов, используемых для расчета параметров ионосферной плазмы, расчете тропосферной задержки принятых сигналов и ее преобразовании через аналитические модели в прогнозные профили атмосферных характеристик с начальными приближениями по метеоданным, климатическим и аналитическим моделям атмосферы, отличающийся тем, что источник радиосигналов расположен на поверхности Земли, океана, льда или в атмосфере Земли, прием радиосигналов осуществляется через антенны на космических аппаратах, в структуре радиосигналов содержится идентификационный индекс, связанный с координатами источника сигналов, расчет интегрального влагосодержания атмосферы осуществляется по оценкам тропосферной задержки принятых сигналов с использованием аналитических, климатических и регрессионных моделей.
2. Способ зондирования ионосферы и тропосферы по п. 1, отличающийся тем, что с источником радиосигналов скоммутирован приемовычислитель сигналов на не менее двух частотах каждой из используемых ГНСС с передачей полученных данных в структуре радиосигналов на КА, бортовые многочастотные навигационные приемники сигналов ГНСС которых используются для зондирования внешней ионосферы.
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ ОДНОЧАСТОТНОГО ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2006 |
|
RU2313103C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ ИНТЕНСИВНОСТИ НЕОДНОРОДНОСТЕЙ ИОНОСФЕРЫ ПО ДАННЫМ ВЕРТИКАЛЬНОГО ЗОНДИРОВАНИЯ | 2009 |
|
RU2403592C1 |
| Устройство для автоматической загрузки сырца кирпича и тому подобных изделий в сушильную вагонетку | 1951 |
|
SU93995A1 |
| US 5867411 A, 02.02.1999 | |||
| US 20150192670 A1, 09.07.2015 | |||
| US 6061013 A, 09.05.2000. | |||

