Заявленное изобретение относится к геофизике и предназначено для мониторинга окружающей среды, обеспечения радиосвязи и навигации, геодезических измерений, информационного обеспечения сельского хозяйства, здравоохранения и является развитием технологий:
1. Наклонного зондирования ионосферы;
2. Наземного и спутникового радиозондирования ионосферы;
3. Зондирования на основе сигналов навигационных спутниковых систем;
4. Томографии ионосферы;
5. Многочастотного зондирования с геостационарных космических аппаратах (ГКА).
В первой группе технологий зондирования ионосферы в России используется редкая сеть наземных станций наклонного зондирования ионосферы. Для второй группы необходима система наземных ионозондов и ионозонды на отечественных КА. Зарубежным аналогом этого направления является развитие американской сети современных цифровых ионозондов, в том числе создание новой «Сети ионозондов XXI века (Диназонд 21)» [1]. В третьей, четвертой и пятой группе для зондирования ионосферы используется просвечивание атмосферы сигналами навигационных КА (НКА) и ГКА [2] и требуется достаточно плотная сеть приемных станций для диагностики морфологии возмущений атмосферы.
Особенностью методов просвечивания ионосферы сигналами КА являются изменение характеристик радиосигналов со спутников в ионосфере и в тропосфере из-за уменьшения фазовой скорости радиоволн, поляризации молекул водяного пара в магнитном поле Земли [3]. Актуальность диагностики содержания водяного пара в тропосфере при зондировании ионосферы обусловлена также рядом недостатков в существующих технологиях зондирования тропосферы: малое число наблюдений с помощью подъема или сброса радиозондов, высокая стоимость технологий и аппаратуры (например для лазерного зондирования), невысокая точность (микроволновое зондирование) и др. [1]. В свою очередь, на основе длительных наблюдений и коррекции ионосферных и тропосферных ошибок в характеристиках сигналов КА возможна диагностика изменений тенденций в характеристиках позиционирования (геодвижений) реперных пунктов с приемными антенными устройствами сигналов КА.
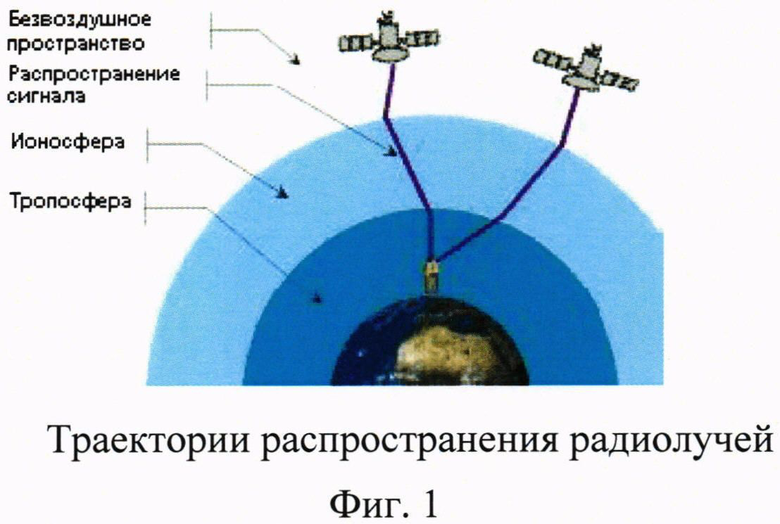
Физической основой зондирования атмосферы является задержка и рефракция распространения сигналов КА в ионосфере и тропосфере из-за искажения траектории радиолуча (см. фиг.1). На основе диагностики этих эффектов при распространении сигналов, например навигационных и геостационарных КА (далее НКА), оценивается содержание электронов в атмосфере и характеристики, тропосферы.
Набег фазы при распространении сигнала НКА в неидеальной среде определяется протяженностью траектории распространения сигнала L между приемником и передатчиком и коэффициентом преломления среды n [3]:
где, φ - набег фазы для рабочей частоты f сигнала, nl - коэффициент преломления сигнала вдоль трассы прохождения сигнала, φ0 - некоторая неизвестная начальная фаза сигнала, с - скорость света.
В ионосфере, если пренебречь малым влиянием соударений частиц среды и магнитного поля [3]:

где ne - локальная концентрация электронов.
В тропосфере показатель преломления радиоволн [4]:

где k1, k2, k3 - эмпирические коэффициенты,
Р - атмосферное давление,
Т - температура воздуха, К,
е - парциальное давление водяного пара, Па.
GPS/ГЛОНАСС(Galileo) технологии реализуют одновременно измерения групповых и фазовых задержек сигналов на нескольких частотах. Для GPS это псевдодальность L1(λ1) на частоте 1,575 ГГц и L2(λ2) на частоте 1,228 ГГц:
L1=ρ'-I1+λ1N1, L2=ρ'-I2+λ2N2,
P1=ρ'-I1+c·(δпtп1+δtc1), P2=ρ'-I2+c·(δпtп2+δtc2),
где ρ' включает в себя геометрическое расстояние между приемником и НКА, I1,2 - задержки в тропосфере-ионосфере и другие частотно-независимые задержки, λ1N1 и λ2N2 - неизвестные начальные фазы сигналов на рабочих частотах f1 и f2, с - скорость света, δtc1,2 и δtп1,2 - инструментальные задержки сигналов в аппаратуре спутника и приемника (аппаратурная задержка при переключении частот может достигать до 30 наносекунд).
Дифференциальная задержка двух сигналов пропорциональна полному электронному содержанию ионосферы (ПЭС): ΔL=ΔI+В, ΔР=ΔI+δ, где ΔI - дифференциальная ионосферная задержка (в которую, обычно, включают и тропосферную задержку), В - неизвестная начальная фаза, δ - неизвестная аппаратурная задержка.
Формально уравнения для групповых и фазовых измерений имеют одинаковый вид, и ионосферная задержка может быть определена с точностью до неизвестной поправки. Инструментальная задержка мало меняется на временах более нескольких дней. Начальная фаза остается постоянной в течение сеанса связи.
Абсолютное значение ПЭС определяется обычно с помощью моделей ионосферы и базовых станций с выверенными приемными устройствами характеристик сигналов НКА и высокоточными частотомерами (водородным и рубидиевым стандартами частоты). Инструментальные задержки и неизвестные фазы для каждого спутника определяются на основе сравнения с базовыми станциями и оценок, указанных в технической документации (испытаний). Грубые оценки абсолютных значений ПЭС могут быть получены на основе поправок системы дифференциальной коррекции и мониторинга (СДКМ, SBAS) глобальных навигационных спутниковых систем (ГНСС) ГЛОНАСС/GPS, где предусмотрены ретрансляторы-ГКА.
С учетом показателей преломления радиоволн в ионосфере и тропосфере, оценок задержек принимаемых сигналов и координат приемника и передатчика можно диагностировать характеристики просвечиваемой среды. В качестве возможной основы предлагаемой технологии зондирования ионосферы по сигналам НКА GPS/ГЛОНАСС(Galileo) и ГКА могут быть: патент РФ №2042129 «Ионосферный зонд» от 11.05.1993, патент РФ на полезную модель №76462 (опубл. 20.09.2008 г.), по заявке РФ 2010105905 от 19.02.2010 г. (G01S 1/32), опубл. 10.05.2010 г., на аппаратно-программный комплекс ионосферного мониторинга, а для зондирования характеристик тропосферной задержки - публикации [3].
В патенте РФ №2042129 предлагается применить двухчастотную навигационную аппаратуру пользователей космических навигационных систем типа "Навстар" и/или "ГЛОНАСС" в качестве ионосферного зонда. В заявке отсутствует учет тропосферной задержки радиосигналов, инструментальных и аппаратных ошибок, не решен вопрос определения начальной фазы зондируемых сигналов. Не указано, что диагностика изменения суммарного электронного содержания в атмосфере возможна относительно некоторого неизвестного уровня при значительных пространственных ограничениях. Не учтена возможность использования третьей частоты космических навигационных систем и сигналов с ГКА, поправок СДКМ (SBAS и подобных систем). В схеме расчетов относительного изменения задержки сигналов не указана связь с характеристиками ионосферы.
В патенте РФ на полезную модель №76462 утверждается, что заявленное устройство позволяет рассчитать полное электронное содержание (ПЭС) в ионосфере, однако фактически речь идет о диагностике изменений суммарного электронного содержания в ионосфере относительного некоторого неизвестного уровня. Причины те же. В расчетах также не учтена тропосферная рефракция и ее вклад (до 50% и более, особенно при малых углах наклона распространения радиоволн над горизонтом) в оценку ПЭС в атмосфере, а также начальные фазы сигнала, подстройка часов, шумы и погрешности измерений, сигналы ГКА и т.д.
В патенте РФ на полезную модель на аппаратно-программный комплекс ионосферного мониторинга по заявке 2010105905 от 19.02.2010 г. (G01S 1/32), опубл. 10.05.2010 г. допущены те же погрешности. Тропосферная рефракция не учтена в результатах решения обратной и некорректной задачи восстановления вертикальных профилей заряженных частиц. Кроме того, в алгоритме использовано накопление разностей псевдодальностей только с одного НКА по результатам нескольких временных измерений, что обусловливает значительные ошибки в расчетах характеристик ионосферы. Проверки алгоритма показали занижение оценок высотных профилей концентрации заряженных частиц. Игнорированы сбои сигналов из-за нерегулярной автоматической коррекции бортовых часов, ионосферных возмущений и других факторов, что также приводит к значительным погрешностям вычислений и неустойчивой работе алгоритма. Кроме того, используется предположение о гладком профиле концентрации заряженных частиц в верхней ионосфере, что не соответствует результатам натурных измерений. Есть пространственные (геометрические) ограничения - с помощью предложенного алгоритма не возможно восстановление профилей в значительном конусе углов (фактически до ±25 градусов от зенита). Восстановленные профили не соответствуют положению наземного приемника, их географическая привязка оказывается удаленной от приемника в сторону видимого НКА до нескольких сотен километров. При этом, требуется постоянная коррекция алгоритма.
Для получения корректных данных мониторинга ионосферы в рассматриваемом аналоге не используется комплекс видимых НКА. Для валидации рассчитываемых оценок не используются данные наземных и космических наблюдений состояния атмосферы, данные спутникового радиозатменного зондирования, данные радиозондирования тропосферы и нижней стратосферы, в том числе по сети аэрологических станций. Не упоминается необходимость серьезной модели региональной атмосферы, которая должна использоваться в расчетах и формироваться по данным наблюдений. На основе этой модели можно формировать начальные приближения в целом неизвестных фаз сигналов НКА и получать оценки ПЭС.
В патенте РФ на полезную модель на аппаратно-программный комплекс ионосферного мониторинга по заявке 2010105905 от 19.02.2010 г. также принципиально не учитывается, что в основе любого мониторинга должна быть модель процесса или явления, а предлагаемая к оперативному использованию в качестве приближений климатическая модель ионосферы требует постоянной адаптации к конкретному региону. Следствием этого являются значительные погрешности в расчетах профилей концентрации заряженных частиц и относительных оценок ПЭС, позиционирования антенных приемных устройств сигналов НКА при выключенных в приемнике опциях компенсации ошибок.
Таким образом, рассмотренные технические решения для зондирования ионосферы обладают следующими недостатками: отсутствие технологий синтеза данных, с сети навигационных приемников сигналов GPS/ГЛОНАСС/Galileo, использования третьей частоты ГНСС, данных с ионозондов наземного и космического базирования, отсутствие учета тропосферных задержек в характеристиках GPS/ГЛОНАСС/Galileo-сигналов (не во всех навигационных приемниках возможна коррекция сигналов по модельным тропосферным данным, транслируемым в сообщениях о характеристиках сигналов НКА), отсутствие учета использования сигналов с ГКА, значительные погрешности в расчетах профилей концентрации заряженных частиц и относительных оценок ПЭС, низкое качество моделей ионосферы и тропосферы, отсутствие верификации и валидации алгоритмов, отсутствие контроля и поверок используемого оборудования.
Техническим результатом заявленного изобретения является определение параметров атмосферы по сигналам НКА с учетом данных с ионозондов на КА, станций наклонного (вертикального) зондирования ионосферы (радаров некогерентного рассеяния и др.), моделей ионосферы и тропосферы, электронных архивов о результатах зондирования атмосферы, данных с базовых станций СДКМ (SBAS) и расчет: значений полной электронной концентрации в ионосфере, значений ионосферных и тропосферных задержек, тропосферной рефракции принимаемых сигналов КА, показателя преломления в тропосфере, вертикального профиля влажности воздуха и вертикального профиля плотности воздуха, геодвижений на длительных интервалах наблюдений за характеристиками позиционирования реперных пунктов с приемными антенными устройствами сигналов КА. С помощью заявленного изобретения, в котором могут использоваться сети ведомственных навигационных приемников, расширяется область зондирования атмосферы, повышается точность и надежность определения параметров ионосферы и тропосферы, точность позиционирования и оценки геодвижений.
Заявляемый комплекс обеспечивает зондирование ионосферы и тропосферы по сигналам НКА (ГНСС ГЛОНАСС, потребительский и военный код, или GPS (С/А код). Предусмотрена возможность комплексного использования сигналов других навигационных систем, их сигналов на дополнительных частотах, сигналов ГКА, данных с бортовых приемников сигналов НКА на КА в ОКП, данных с ионозондов на КА, данных зондирования атмосферы и электронных архивов, данных с базовых станций СДКМ (SBAS). Заявленный комплекс может быть применен для валидации региональных и глобальных моделей ионосферы и тропосферы с расчетом геодвижений.
Особенностью заявленного изобретения является усовершенствование способа зондирования и мониторинга ионосферы с помощью сигналов НКА с учетом использования результатов зондирования тропосферы, данных спутникового зондирования верхней ионосферы, данных наземных станций вертикального (наклонного) зондирования ионосферы, сигналов комплекса видимых НКА, адаптивных моделей ионосферы, данных СДКМ (SBAS), формирования по результатам зондирования региональной модели атмосферы, возможностью использования сетей навигационных приемников, расчета геодвижений на длительных интервалах наблюдений за характеристиками позиционирования реперных пунктов с приемными антенными устройствами сигналов НКА.
Технический результат достигается тем, что комплекс зондирования ионосферы и тропосферы с расчетом геодвижений, содержащий наземные и бортовые приемные антенные устройства для приема сигналов с космических аппаратов (КА) ГЛОНАСС/GPS/Galileo, геостационарных КА и КА зондирования ионосферы и тропосферы, наземные и бортовые навигационные приемники сигналов с указанных КА, ПЭВМ оператора на базе процессора с устройством отображения информации, который скоммутирован с наземными и бортовыми навигационными приемниками через приемопередающую станцию спутниковых данных, со станциями зондирования, электронными архивами гелиогеофизических, геодинамических и метеорологических данных, при этом процессор выполнен с возможностью:
- управления приемными антенными устройствами в зависимости от уровня сигнал/шум путем обработки поступающих с выходов навигационных приемников сигналов и заданных сетевых планов приема информации;
- конвертирования и дешифрования принимаемых сигналов,
- расчета координат, прогностического положения и подспутниковой точки КА, координат приемных антенных устройств;
- расчета значений полной электронной концентрации в ионосфере, их осреднение и коррекция;
- расчета значений ионосферных и тропосферных задержек, тропосферной рефракции принимаемых сигналов КА и их коррекция по фактическому положению КА для коррекции рассчитанных значений полной электронной концентрации в ионосфере;
- расчета показателя преломления в тропосфере, который используется при оценке суммарной поправки тропосферной рефракции;
- расчета профиля показателя преломления по рассчитанным тропосферным задержкам сигнала;
- расчета вертикального профиля влажности воздуха и вертикального профиля плотности воздуха из восстановленного профиля показателя преломления;
- расчета поля распределения полной электронной концентрации в ионосфере;
- формирования региональных моделей ионосферы и тропосферы;
- расчета геодвижений на длительных интервалах наблюдений за характеристиками позиционирования реперных пунктов с приемными антенными устройствами сигналов КА;
- валидации, верификации и архивации получаемой информации в табличной и графической форме с автоматическим непрерывным режимом в реальной масштабе времени;
- вывода на устройство отображения результатов зондирования и расчетов.
Сущность и признаки заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами, где показано следующее:
на фиг.1 - траектории распространения радиолучей;
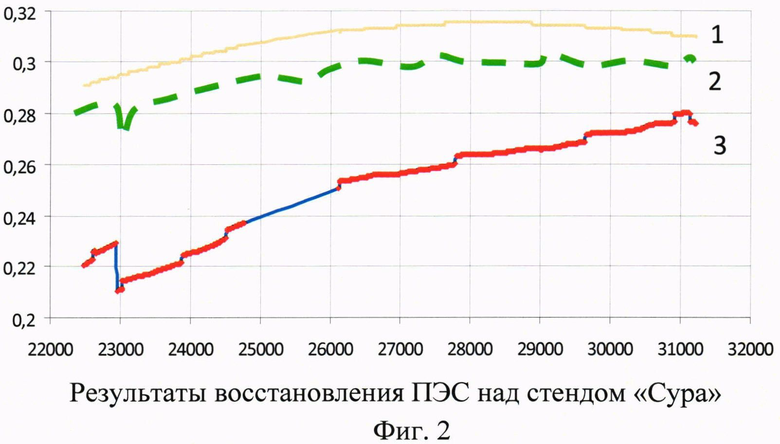
на фиг.2 - результаты восстановления ПЭС в ходе реального эксперимента с комплексом над стендом «Сура» в августе 2009 г. (поселок Васильсурск, Нижний Новгород);
на фиг.3 - структурная схема комплекса зондирования ионосферы и тропосферы, где:
1 - группировка НКА и ГКА,
21…2n - наземные приемные антенные устройства,
3 - бортовые приемные антенные устройства,
41…4n - наземные навигационные приемники,
5 - бортовые навигационные приемники КА,
6 - ПЭВМ на базе процессора с устройством отображения информации,
7 - приемопередающая станция спутниковых данных,
8 - блок исходных данных;
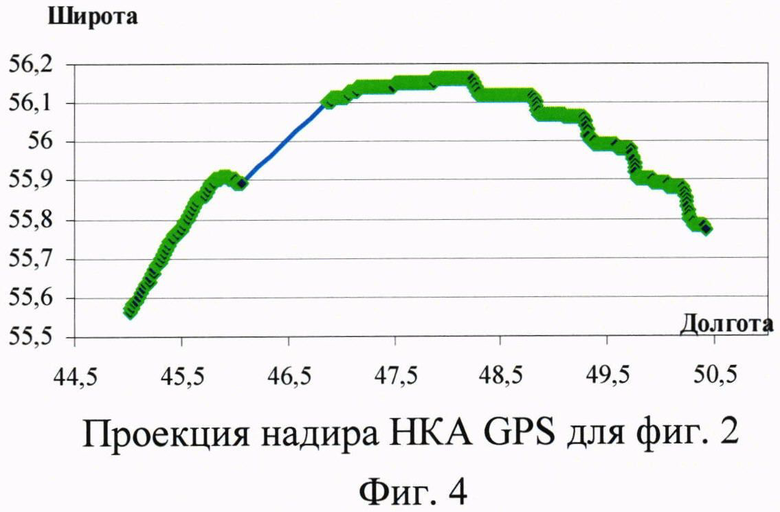
на фиг.4 - проекция надира НКА для фиг.2 по данным наземного приемника на стенде «Сура»;
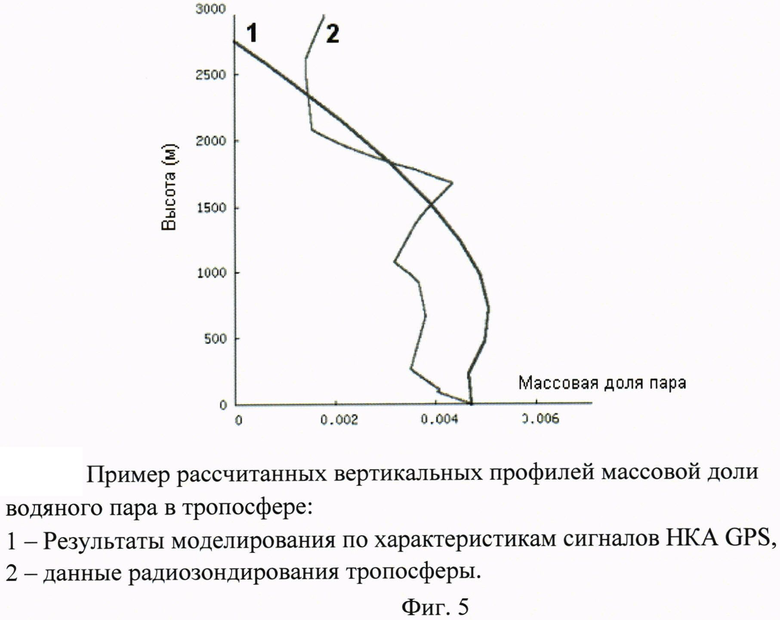
на фиг.5 - пример рассчитанных вертикальных профилей массовой доли водяного пара в тропосфере, где:
1 - результаты моделирования по характеристикам сигналов НКА GPS,
2 - реальные данные радиозондирования тропосферы;
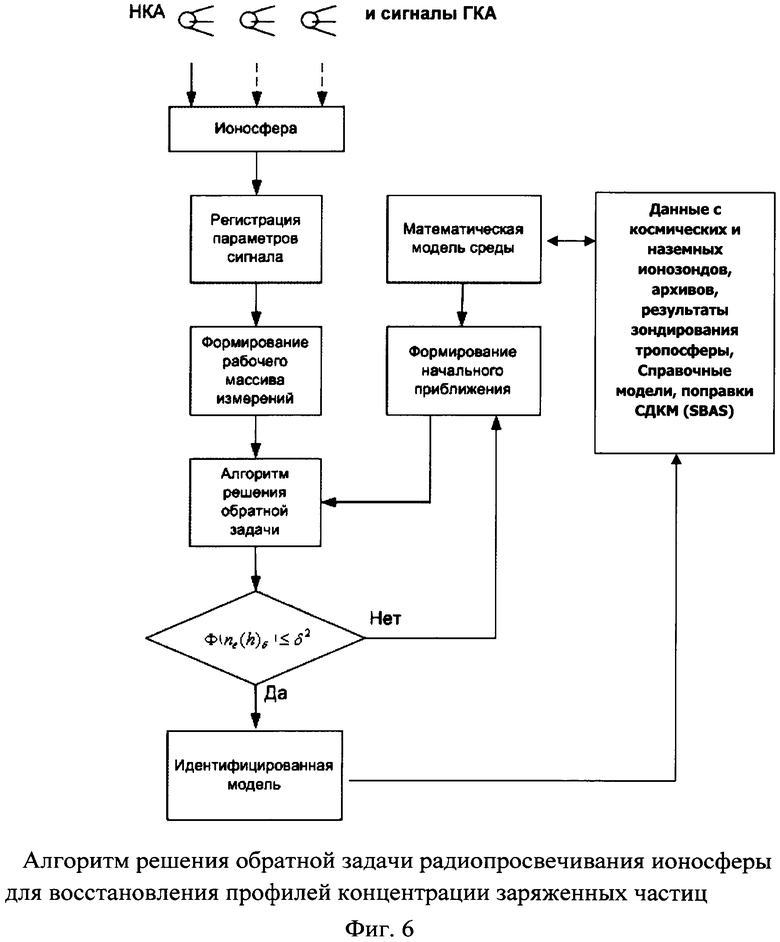
на фиг.6 - алгоритм решения обратной задачи радиопросвечивания ионосферы для восстановления профилей концентрации заряженных частиц;
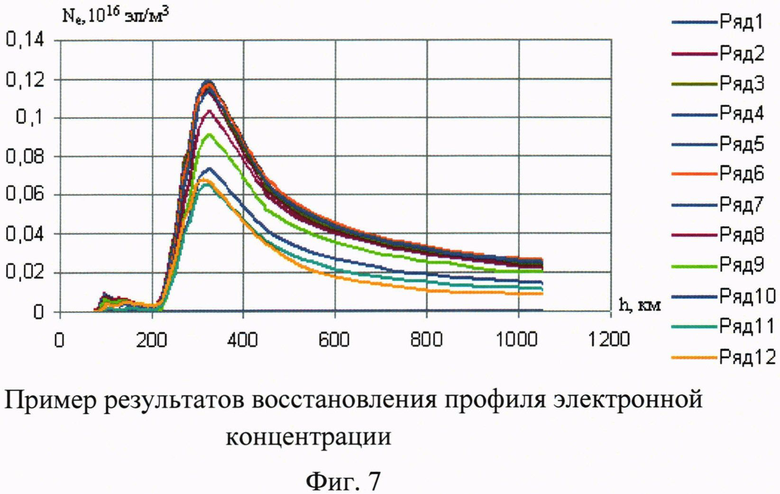
на фиг.7 - пример результатов восстановления профиля электронной концентрации в ходе реального эксперимента с комплексом в августе 2009 г. над стендом «Сура»;
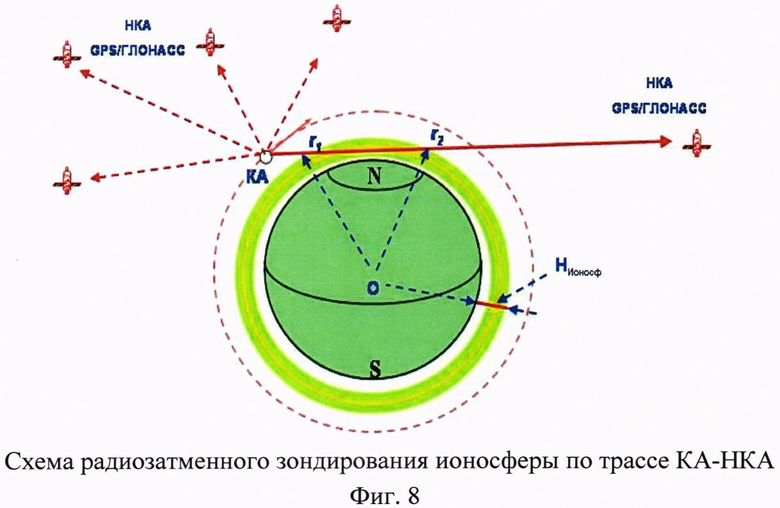
на фиг.8 - схема радиозатменного зондирования ионосферы по трассе КА-НКА;
на фиг.9 - блок-схема алгоритма работы процессора.
Принцип и алгоритм работы заявленного изобретения заключается в следующем.
Для зондирования ионосферы и тропосферы с расчетом геодвижений используются принимаемые через антенные устройства (2, 3 фиг.3) сигналы навигационных КА GPS/ГЛОНАСС/Galileo (1, фиг.1) и сигналы геостационарных КА. Антенны скоммутированы с навигационными приемниками сигналов космических навигационных систем GPS/ГЛОНАСС/Galileo (4, 5 фиг.3) с соответствующими блоками питания. Приемные и антенные устройства могут располагаться на движущихся и стационарных объектах, на низкоорбитальных КА. Управление работой комплекса, планирование приема и обработка сигналов производится с помощью процессора (6, фиг.3), в котором прошиты программы переключения антенных устройств, в том числе бортовых, через станцию приема-передачи спутниковых данных (7, фиг.3), решения прямой и обратной задачи радиопросвечивания атмосферы и восстановления высотных профилей, разрезов и полей концентрации заряженных частиц, характеристик тропосферной рефракции с использованием информации (9, фиг.2) о состоянии атмосферы, электронных архивов для валидации и верификации полученных результатов зондирования (8, фиг.2), создания региональных моделей атмосферы.
Антенные устройства на фиг.3 предназначены для приема сигналов НКА и представляют одну или несколько антенн с малошумящим усилителем (МШУ), переходником для подсоединения к высокочастотному кабелю, через который обеспечивается также питание МШУ. Управление антенными устройствами производится с помощью программы, записанной в процессоре, в зависимости от уровне сигнал/шум путем процессорной обработки характеристик сигналов и заданных сетевых планов приема информации, или в ручном режиме. По уровню принимаемого сигнала происходит предварительная фильтрация используемых НКА, идентификация и контроль полноты кодовых последовательностей в принимаемых сигналах.
Использование нескольких разнесенных антенн или антенных решеток повышает качество приема сигнала и точность вычислений. При установке антенн предусматривается максимальный обзор НКА, либо обзор в выбранных секторах, задаваемых в плане приема или в ручном режиме. По результатам проведенных полевых экспериментов количество видимых НКА в каждой точке Земли и фиксируемых с помощью навигационного приемника для каждого момента времени может достигать до 15-18. При использовании других ГНСС количество одновременно наблюдаемых НКА значительно возрастет.
Приемник сигналов НКА настроен на прием основных рабочих частот навигационных систем и обеспечивается питанием от сети или автономного источника. Радиосигналы с НКА представляют собой промодулированную кодом несущую частоту и эфемеридную информацию. Сигналы с НКА принимаются антенными устройствами, усиливаются, фильтруются и поступают на электронную плату приемника, где сигналы усиливаются, фильтруются и преобразуются в цифровой код. Характеристики навигационных сигналов на выходе приемника представляются в бинарной форме и/или в стандартном формате RINEX.
Приемник сигналов НКА обеспечивает автоматическое непрерывное в реальном масштабе времени определение и выдачу координат антенных устройств в системах координат WGS-84, ПЗ-90. Данные представляются в геодезической проекции с текущими отсчетами времени. В приемном устройстве может быть предусмотрено накопление данных и передача их для обработки по выделенным линиям (кабелям) на процессор. На длительных отрезках наблюдений по этим данным есть возможность диагностировать вариации позиционирования антенных приемных устройств с помощью стандартных статистических методов.
Для дешифрирования принимаемых приемником сигналов НКА GPS/ГЛОНАСС, конвертации в установленный формат, расчета оценок ошибок навигационных измерений, обусловленных влиянием ионосферы и тропосферы и расчета геодвижений используется процессор. В стандартных навигационных приемниках на выходе обычно формируется последовательность данных, в которых могут быть рассчитанные характеристики позиционирования антенных устройств в системах координат WGS-84, ПЗ-90. При этом возможен перерасчет координат по характеристикам видимых КА, положение которых транслируется в принимаемых сигналах. Это важно, так как во многих навигационных приемниках устанавливаются ограничения на геометрию расположения КА, используемых для расчета характеристик позиционирования. Для обширных территорий России с малой плотностью многочастотных навигационных приемников представляет интерес конфигурация НКА с малыми углами возвышения над горизонтом для зондирования тропосферной задержки.
В случае одночастотного приемника качество результатов зондирования ионосферы существенно ухудшается. При этом нельзя получить качественный вертикальный профиль распределения заряженных частиц, существенно отличающийся от распределений справочных моделей ионосферы.
Для одночастотного GPS/ГЛОНАСС-приемника (аналогично и для приема сигналов с ГКА) полное (интегральное) содержание заряженных частиц по радиолучу от приемника до НКА (ПЭС*=I*) определяется выражением [2]:

где |D| - модуль вектора (псевдодальность) между приемником и передатчиком, например по высокоточному коду С/А, L1 - число оборотов фазы по радиолучу на основной частоте f1 принимаемого сигнала с длиной волны λ1=c/f1, const1 и σL1 - константы. В расчетах обычно используется модуль величины I*. Константы оцениваются в результате экспериментов, например при сравнении с данными базовой станции СДКМ, либо с данными контрольно-поверочной станции. Константы могут задаваться в технической документации, рассчитываться с помощью модели ионосферы, по эталонным сигналам с ГКА, по данным наземных и космических ионозондов.
Псевдодальности, измеряемые одночастотными навигационными приемниками, испытывают быстрые и сильные флуктуации, не связанные с вариациями ПЭС, например, из-за автоматической подстройки часов приемника (в современных приемниках эти скачки компенсируются). Фаза несущей частоты принимаемого сигнала после удаления тренда часов приобретает аппаратный шум, превышающий возможные ионосферные флуктуации для их фильтрации. Поэтому при зондировании ионосферы с использованием одночастотных навигационных приемников целесообразно анализировать изменения характеристик принимаемых сигналов по парам-тройкам наблюдаемых КА, а лучше по сети навигационных приемников.
Для повышения точности определении ПЭС в ионосфере с помощью (4) необходимо уменьшить влияние тропосферной задержки, то есть использовать большие углы возвышения. Кроме этого, целесообразно использовать среднюю аддитивную или среднюю геометрическую оценки ПЭС или их комбинации по используемым в расчетах частотам и видимым НКА.
Точность зондирования ионосферы и тропосферы по сигналам НКА повышается при использовании двухчастотных (многочастотных) навигационных приемников сигналов НКА. По фазовым измерениям на двух частотах (f1 и f2) можно рассчитать оценку ПЭС=I0 [5]:

где L1λ1 и L2λ2 можно заменить соответствующими значениями оценок псевдодальности до КА из RINEX-сообщений - стандартной после обработки бинарных данных формы представления принятых навигационных сигналов.
В расчетах возможно комплексирование данных по фазовым измерениям и по псевдодальностям. По фазовым измерениям на трех частотах (f1, f2, f3) оценки ПЭС можно рассчитывать по их комбинации. При использовании выражения (5) для дальнейших расчетов осредненных оценок ПЭС допустимо использование модулей оценок ПЭС с количеством сочетаний двух частот из трех с последующим использованием средней аддитивной или средней геометрической оценки или их комбинаций. Возможно комплексирование одно и двухчастотных оценок ПЭС для получения осредненной оценки ПЭС, данных фазовых измерений и псевдодальностей. При этом, в расчетах ПЭС в вертикальном столбе необходима коррекция на наклон видимого НКА:

где α - зенитный угол направления на НКА, Нионосф - высота ионосферного слоя, R3 - радиус Земли, t - время, φ - широта, λ - долгота приемника.
Для примера на фиг.2 представлены результаты восстановления ПЭС с использованием (5-6) по данным, полученным на стенде «Сура» п.Васильсурск (Нижегородская область). Ось OX - время в секундах с начала суток по UGT. Ось OY - относительное изменение ПЭС: 1 - расчет по неадаптированной модели IRI-2007, 2 - расчет по заявленному способу по видимому созвездию НКА и с учетом поправки на ионосферную задержку, 3 - расчет по алгоритму Патента РФ на полезную модель по заявке 2010105905 от 19.02.2010 г. для НКА GPS с коррекцией по данным справочной модели ионосферы IRI-2007 [1].
Начало первого скачка на кривых 2 и 3 в момент 22939 сек в точке с координатами 55,71 с.ш. 45,33 в.д. обусловлено автоматической подстройкой часов бортового приемника. Участок кривой, ограниченный координатами 55,89° с.ш. 46,07° в.д. (24757 сек) и 56,1° с.ш. 46,86° в.д. (26116 сек), привязан к зоне эффектов излучения стенда. Между этими моментами времени определение ПЭС по алгоритму патента на полезную модель по заявке 2010105905/22 от 19.02.2010 г. невозможно.
Географическая привязка надира НКА GPS для кривой 3 фиг.2 представлена на фиг.4. Неровности восстановленной по данным сигналов НКА траектории обусловлены автоматической подстройкой часов бортового приемника НКА. У ряда современных многочастотных навигационных и геодезических приемников для нивелирования этого эффекта предусмотрены встроенные фильтры, которые могут настраиваться пользователем. Для фильтрации с помощью процессора может использоваться технология сглаживания и выбраковки аномальных выбросов.
При использовании сигналов НКА для зондирования ионосферы часто ограничиваются решением только прямой задачи зондирования. При этом обычно оценивается изменение ПЭС относительного некоторого значения. Для расчета абсолютных значений ПЭС в ионосфере необходимо учитывать начальные фазы сигналов, аппаратные задержки, модели ионосферы, характеристики задержки сигнала в тропосфере, так как за счет тропосферной рефракции искривляется первоначальная траектория радиолуча от НКА и уменьшается скорость его распространения, обычно транслируемые данные поправок с базовых станций СДКМ (SBAS), результаты зондирования атмосферы наземными и космическими ионозондами. Дополнительная задержка сигнала НКА в тропосфере может достигать 8-80 нс, существенно возрастая при малых углах возвышения НКА. При малых углах возвышения НКА менее 10° над горизонтом расчетная оценка тропосферной задержки для их сигналов достигает 20 м. Это значительная величина, ибо ошибка в позиционировании примерно на 16 см соответствует одной единице ПЭС (ТЕС=1016 электронов на квадратный метр) в вертикальном столбе атмосферы.
Тропосферная задержка минимальна для НКА в зените. Поэтому в указанных выше прототипах для зондирования ионосферы сигналами НКА ограничиваются небольшими секторами углов, в которых влиянием тропосферной рефракции пренебрегается. При малых углах возвышения НКА расчеты по указанным в прототипах алгоритмам дают большие погрешности.
Оценки вклада тропосферной задержки должны использоваться при коррекции рассчитанных оценок ПЭС и восстановленных профилей концентрации заряженных частиц в атмосфере. Дополнительная задержка радиосигнала, связанная с прохождением через тропосферный слой, может быть определена по формуле:
где ΔLтр - пространственная задержка сигнала в тропосфере, м,
L - расстояние до спутника, м,
l - путь вдоль траектории радиолуча в тропосфере, м,
nTp - показатель преломления радиоволн в тропосфере (3).
Для расчета показателя преломления радиоволн в тропосфере используются метеоданные, справочные модели, формируемая по данным наблюдений региональная модель атмосферы. При этом обычно определяется осредненный nTp показатель преломления радиоволн у земной поверхности, который используется при оценке суммарной поправки тропосферной рефракции. На основе рассчитанным значений производится расчет характеристик тропосферной рефракции сигналов НКА для коррекции полученных оценок ПЭС в ионосфере.
Уравнение (3) можно представить как зависимость от плотности воздуха и плотности водяного пара (ρ=ρс+ρп):

где Rc=287,0538, Дж/(кг К), Rп=461,526, Дж/(кг К) - универсальные газовые постоянные сухого воздуха и пара.
«Сухая» часть тропосферной задержки составляет около 90% от полной тропосферной задержки, она достаточно точно определяется по метеоданным, измеренным вблизи приемника, а также с использованием гидростатического закона (dP=ρcgdz) убывания давления (Р) с высотой. «Влажная» часть зависит от морфологии поля давления водяных паров.
Таким образом, для оценки тропосферной задержки сигналов НКА необходима инициализация начальных профилей температуры, влажности воздуха и атмосферного давления, модель траектории распространения радиосигнала в тропосфере. По значениям тропосферных задержек радиосигнала для заданного диапазона углов места НКА, корректируются рассчитываемые значения ПЭС в ионосфере.
Для восстановления профиля n(h) по серии измерений задержек сигнала формируют систему уравнений:

где Y - матрица результатов измерений задержек сигнала по траектории радиолуча в тропосфере с элементами ΔL,
Х - матрица показателя преломления в тропосфере с элементами (ni-1) по слоям (обычно используется приближение сферической симметрии слоев),
А - оператор прямой задачи или матрица преобразования (ядро уравнения, например, в виде фильтра Калмана [6]), с элементами:

где wi - квадратурные веса на i-м уровне,
R - радиус Земли, м,
β - угол места навигационного КА; м;
n0 - обобщенный показатель преломления радиоволн по всей трассе и у земной поверхности.
Элементы (10) могут рассчитываться с помощью метода сопряженных градиентов или с помощью построения уравнения авторегрессии. При этом решается обратная некорректная задача атмосферной рефракции, которая имеет приближенное решение на основе математического аппарата решения интегральных уравнений Фредгольма первого рода [7] и нахождения конечномерного вектора, минимизирующего функционал:

где {A(h), Uδ} - искомая совокупность приближения оператора и функции некоторого приближения Uδ=n(h)δ по некоторой трассе наблюдаемого НКА.
Искомая совокупность {A, Uδ} должна при минимизации погрешности δ обеспечивать лучшее приближение к точному решению задачи: Ф(n(h)δ)≤δ2.
Из восстановленного профиля n(h) может быть рассчитан вертикальный профиль влажности воздуха и вертикальный профиль плотности воздуха с использованием предположения политропной модели атмосферы, где температура с высотой убывает по линейному закону, а атмосферное давление убывает по барометрическому закону.
При решении обратной задачи определения искомого вектора Х (профиля показателя преломления n(h)) по данным задержки радиосигналов может применяться метод статистической регуляризации. При этом решение получается также в результате итерационного процесса:

где xb - начальное приближение вектора X,
Ку - матрица ошибок измерений значений ΔL, 

s - номер итерации,
Rx - матрица значений межуровенной корреляции (стабилизации) показателя преломления радиоволн:

где RT, RP, Re - матрицы ковариации полей температуры, атмосферного давления и влажности воздуха [8].
Для первых приближений можно использовать профиль относительной влажности, который задается экспоненциальной моделью, а также линейное изменение температуры с высотой.
Точность решения обратной задачи зависит от качества задания корреляционных функций.
Другой способ восстановления вертикальных профилей связан с использованием вариационного метода. При этом, необходимо найти такой вектор Х, при котором достигается минимум функции потерь как и в (11):

где Х - оценка вектора профиля состояния атмосферы [9].
Для реализации этого метода необходим большой архив реально наблюдавшихся вертикальных профилей показателя преломления, для чего и создается справочная региональная модель ионосферы.
По восстановленному вертикальному профилю показателя преломления можно восстановить профиль влажности, например, задав вертикальный профиле температуры воздуха. Вертикальное распределение атмосферного давления может быть получено из предположения о гидростатическом профиле плотности воздуха.
На фиг.5 представлен пример рассчитанного по характеристикам сигналов НКА GPS из [3] по представленному методу вертикального профиля влажности с высотой и данные радиозондирования влажности с аэрологической станции Зеленоград.
Наибольшей информативностью метода зондирования вертикального распределения содержания водяного пара в нижних слоях атмосферы по измерениям задержек радиосигналов НКА соответствуют схемы с небольшими углами места навигационных спутников. При углах места менее 5° над горизонтом резко возрастают ошибки расчетов [10].
Ряд продолжительных наблюдений за характеристиками сигналов НКА и полученные при этом оценки ПЭС, скорректированные на ошибки тропосферной рефракции, могут использоваться для восстановления вертикальных профилей электронной концентрации в ионосфере (ne(h)). При этом также решается обратная некорректная задача атмосферной рефракции, которая имеет приближенное решение, например, как в алгоритме заявки на выдачу патента РФ на полезную модель от 19.02.2010 №2010105905/22 на основе математического аппарата решения интегральных уравнений Фредгольма первого рода [7]. Набор вертикальных профилей может быть интерполирован в вертикальный разрез зондируемых характеристик ионосферы и тропосферы.
Основой технологии решения обратной задачи радиопросвечивания в предлагаемом комплексе выбрано решение задачи нахождения конечномерного вектора, минимизирующего функционал:

где {A(h), Uδ} - искомая совокупность приближения оператора и функции некоторого приближения Uδ=ne(h)δ по трассе 
Начальное приближение профиля концентрации заряженных частиц задается из климатических моделей ионосферы, которые необходимо постоянно подстраивать под конкретный исследуемый регион на основе данных наклонного и спутникового зондирования ионосферы и создания региональной модели ионосферы. В последующих приближениях реализуется итерационная процедура с использованием предыдущих профилей.
Реализованный вариант схемы решения обратной задачи радиопросвечивания ионосферы Земли сигналами НКА представлен на фиг.6.
При формировании начального приближения учитывается тропосферная задержка. В случае появления в расчетах некорректности или нефизичных результатов моделирования предусмотрена фильтрация результатов по предыдущим приближениям. Кроме того, производится осреднение рассчитанных профилей по нескольким НКА. Это повышает устойчивость и надежность расчетов.
Восстановление ne(h) путем осреднения по нескольким НКА и ГКА целесообразно, так как восстановленный профиль ne(h) по одному НКА или ГКА является приближенным решением и удален от точки расположения приемника к наблюдаемому НКА или ГКА, сигналы которого используются для решения (15). Поэтому для расчета профиля ne(h) над пунктом зондирования использованы осредненные аддитивные или среднегеометрические оценки профилей, восстановленных с нескольких КА. Либо результаты комплексирования этих оценок. При этом сглаживается структура рассчитанных возмущений ионосферы, но повышается надежность определения зондируемых профилей над точкой зондирования. Возможна коррекция рассчитанных профилей при поступлении данных с наземных и космических ионозондов, станций СДКМ, результатов зондирования атмосферы.
Для повышения точности зондирования предусмотрено формирование региональной модели ионосферы на основе данных наблюдений, как, например, в международной модели ионосферы IRI-2007.
В экспериментах с вариантом реализации комплекса из двух многочастотных навигационных приемников удалось при верификации и валидации алгоритма решения обратной задачи радиопросвечивания ионосферы Земли по трассе НКА-Земля достигнуть восстановления высотного распределения электронной концентрации в ионосфере в диапазоне высот от 80 до 1000 км со среднеквадратической погрешностью порядка не хуже 1014 электронов/м3. Пример результатов восстановления профилей электронной концентрации в экспериментах на стенде «Сура» п.Васильсурск (Нижегородская область) по характеристикам принятых сигналов НКА представлен на фиг.7. Ряды 1-12 соответствуют следующим моментам времени: 5,96, 6,26, 6,56, 6,85, 7,44, 7,74, 8,04, 8,33, 8,63, 8,93, 9,22, 9,24 час UGT. Ось OX - высота в км; ось OY - относительное изменение концентрации.
Проверка качества восстановленных профилей и реализованного алгоритма проводилась при сравнении с результатами наклонного зондирования ионосферы наземным ионозондом на полигоне «Сура». Относительная погрешность определения максимально применимой частоты (МПЧ) ионосферы по сигналам НКА с помощью метода радиопросвечивания составила не более 5-10% для дневных и 10-20% для ночных условий наблюдения. Этого достаточно для радиотехнических измерений основных потребителей данных мониторинга ионосферы. При верификации использовались также профили радиопросвечивания атмосферы, полученные с помощью КА «COSMIC», к электронным архивам которых в процессоре комплекса предусмотрена опция коммутации и запроса, как и к другим международным архивам характеристик сигналов космических навигационных систем и метеоданных.
Таким образом, качество восстановленных профилей соответствовало установленным требованиям используемого в магнито-ионосферной службе Росгидромета «Временного руководства по прогнозированию характеристик ионосферы». Временные затраты на получение первого осредненного профиля со стабилизацией ошибок составили не менее 1-3 минут после включения хотя бы одного приемника (без горячего старта).
Преимуществом зондирования ионосферы из ОКП по сигналам НКА ГЛОНАСС/GPS/Galileo является большее количество видимых НКА, глобальность и оперативность обзора атмосферы. Кроме того, зондирование верхней ионосферы с помощью бортовых приемников сигналов НКА позволяет уточнить характеристики восстановленных профилей концентрации заряженных частиц, а данные с космических ионозондов, результаты дорогостоящих зондирований радарами некогерентного рассеяния.
С помощью бортового навигационного приемника КА возможна реализация радиозатменного метода просвечивания атмосферы, когда один КА наблюдает сигналы радиовосхода/захода других КА (фиг.8). При этом необходима высокоточная координатная привязка положения бортового приемника КА [1].
При радиозатменном зондировании ионосферы анализируется задержка сигнала в ионосфере при его прохождении от НКА к КА по трассе |r1-r2|, где r1, r2 - вектора из центра Земли в точку выхода и входа сигнала в ионосферный слой высотой Нионосф над поверхностью Земли. Если КА принимает сигнал внутри ионосферного слоя, то можно принять, что вектор rl ориентирован на КА.
Задержка сигнала Δρ(L1, t) на частоте L1 (Гц) по трассе |r1-r2| через ионосферный слой представляется в виде:
где 


С использованием распределения [11]:

где z=(h-h0)/H, h0 - точка достижения максимума подинтегральной функции, Н - нормирующий коэффициент, φ, λ - широта и долгота точки надира.
При нахождении НКА в зените относительно КА:

С учетом (1), 
To есть:

При наличии наземных измерений ПЭС и Iзенит по (3), а также оценок критических частот ионосферы, задержка сигнала по трассе КА-НКА [12]:


Этот алгоритм в той или иной интерпретации может реализовываться в процессоре бортовой реализации комплекса (на КА), чтобы сбрасывать результаты обработки данных зондирования на приемо-передающую станцию.
Для восстановления вертикальных профилей распределения заряженных частиц выше максимума F2-слоя ионосферы целесообразно использовать решение обратной задачи радиопросвечивания в виде (15). При этом полезны данные с космических ионозондов и радаров некогерентного рассеяния.
Вертикальное разрешение радиозатменного метода зондирования составляет в атмосфере для дециметровых волн несколько сотен метров. Горизонтальное разрешение в плоскости просвечивания определяется длиной пути луча в слое, толщина которого соответствует барической ступени атмосферы 
Оценки математического ожидания ионосферной ошибки (и СКО) для сигналов видимых НКА с низкоорбитальных КА обычно не превышают ~10 м. В магнитовозмущенных условиях растет риск появления ошибок более 30 м (до 100 м и более). Для снижения этих ошибок необходимо увеличивать количество разнесенных приемных антенн и использовать параллельные расчеты по каждой антенне с последующим осреднением результатов.
Для расчета геодвижений используются рассчитанные на длительных интервалах наблюдений координаты приемных антенн по принимаемым сигналам навигационных КА и геостационарных КА с оцениванием основных моментов распределения характеристик позиционирования и расчетом скоростей и ускорений на основании реперных координат. При этом в процессоре предусмотрена возможность использования также метода спектрального анализа для диагностики более тонких эффектов в характеристиках геодвижений пунктов с приемными антенными устройствами сигналов НКА.
Сложностью реализации технологии зондирования ионосферы по сигналам НКА в конкретном пункте является необходимость валидации реализованных методик. Для этого должны создаваться региональные адаптируемые модели ионе сферы и тропосферы с возможностью расчета геодвижений.
Программное обеспечение для реализации заявленных функций комплекса выполнено на основе процессора для ОС Windows и Unix-подобных систем, серверных приложений и коммуникационной сети на основе Интернет-связи, оптоволокна, линий радиосвязи. Программный комплекс для восстановления профилей электронной концентрации в ионосфере по сигналам НКА и характеристик тропосферной задержки осуществляет:
1. Управление и планирование приемом сигналов;
2. Идентификацию и контроль полноты кодовых последовательностей в принимаемых сигналах;
3. Оценку характеристик сигналов навигационных спутниковых систем;
4. Обработку данных файлов формата RINEX и конвертацию в бинарный формат;
5. Расчет фактических координат и прогностического положения КА и их подспутниковых точек, координат наземных и бортовых приемных антенных устройств в системах координат WGS-84, ПЗ-90,
6. Расчет полной электронной концентрации в ионосфере и поля распределения полного электронного содержания в ионосфере;
7. Формирование матрицы начальных и модельных приближений профиля концентрации заряженных частиц в ионосфере, вертикального профиля влажности воздуха и вертикального профиля плотности воздуха в тропосфере над пунктом зондирования на основе региональной модели атмосферы;
8. Формирование региональных моделей ионосферных и тропосферных характеристик и ведение архивов;
9. Расчет высотного распределения концентрации заряженных частиц в ионосфере;
10. Расчет профилей радиозатменного зондирования;
11. Расчет профилей влажности и плотности в тропосфере;
12. Расчет геодвижений на длительных интервалах наблюдений за характеристиками позиционирования реперных пунктов с приемными антенными устройствами сигналов НКА;
13. Построение и анализ графиков и карт;
14. Расчет аномалий в контролируемых характеристиках;
15. Вывод на устройство отображения ПЭВМ оператора результатов зондирования ионосферы и тропосферы.
Упрощенная блок-схема алгоритма работы процессора представлена на фиг.9.
При спланированной работе комплекса сигналы НКА (ГКА) принимаются с помощью антенного устройства, включающего одну или несколько антенн. Сигналы НКА (ГКА) на выходе антенн усиливаются, фильтруются, преобразуются в цифровой код, делятся на фрагменты, внутри которых преобразуются в цифровой код и представляются в установленном формате для последующей обработки. Сравнивается значение отношения сигнал/шум с пороговым значением, если оно меньше заданного, то через установленное время задержки происходит переключение приемных антенн в режим ожидания нового задания. Для бортовых приемников управление антеннами может реализовываться по командам через станцию приема-передачи спутниковых данных. В зависимости от характеристик используемого приемного устройства, в процессоре происходит распараллеливание вычислений. Если используется прием одночастотных сигналов НКА, то вычисления ограничивают расчетом координат НКА, положения их подспутниковой точки и оценок ПЭС с использованием дифференциального метода по одному или нескольким НКА, сигналов ГКА, моделей ионосферы, эффектов тропосферной рефракции, поправок СДКМ и других доступных данных. В противном случае, если используются многочастотные навигационные приемники, уточняется набор используемых рабочих частот, координаты НКА и ГКА с положением их подспутниковой точки, производится фильтрация видимых НКА по их положению над горизонтом и относительно зенита, производится расчет эффектов тропосферной рефракции, и оценок ПЭС, профилей концентрации заряженных частиц в ионосфере с последующими процедурами фильтрации, осреднения, архивации и картированием результатов.
В режиме реального времени производится формирование массивов измерений для восстановления оценок ПЭС, профилей концентрации заряженных частиц в ионосфере и характеристик тропосферной задержки сигналов НКА и ГКА. Для начального приближения восстанавливаемых профилей при решении обратной задачи моделирования используются данные моделей ионосферы, тропосферы с оперативной коррекцией по результатам метеорологических и аэрологических наблюдений, результаты предыдущих расчетов, профили, полученные при радиопросвечивании атмосферы наземными и космическими ионозондами, данные СДКМ. По еле проведения итерационных приближений и проверки полученных результатов на соответствие заданным погрешностям, производится фильтрация, осреднение, представление, архивация и картирование полученных результатов, а также анализ выбросов, трендов, в том числе по координатам приемных антенн.
В качестве процессора и устройства отображения может быть использован компьютер с дисплеем. Для диагностики характеристик тропосферной рефракции используется наземный навигационный приемник сигналов GPS/ГЛОНАСС, соединенный с антенным устройством. Целесообразно обеспечить разнесение антенных устройств, чтобы увеличить базу измерений и улучшить точность координатной привязки. При наличии бортового приемника на КА или использовании дополнительных источников информации организуется прием данных через устройства приемо-передачи спутниковых данных, каналы Интернет-связи, оптоволоконные линии, линии радиосвязи.
Взаимное расположение элементов комплекса должно обеспечивать прием и дешифрирование сигналов НКА с минимизацией техногенных помех и может быть реализовано в подвижном или в стационарном варианте, что предпочтительнее, для получения большей точности результатов зондирования. При этом целесообразна реализация принципа многоантенности для одного приемника, использование сетей приемников. Форма выполнения элементов или устройства в целом определяются доступной элементной базой, имеющимися ресурсами, требованиями потребителя.
В перспективе с помощью предложенного аппаратно-программного комплекса при использовании цезиевых частотомеров (стандартов частоты-времени) с помощью заявленного способа можно также диагностировать характеристики гравитационного потенциала и магнитного поля Земли.
Список литературы
1. Тертышников А.В., Большаков В.О. Технология мониторинга ионосферы с помощью приемника сигналов навигационных КА GPS/ГЛОНАСС (Galileo) // Информация и космос, 2010, №1. С.100-105.
2. Афраймович Э.Л., Перевалова Н.П. GPS-мониторинг верхней атмосферы Земли. - Иркутск: ГУ НЦ РВХ ВСНЦ СО РАМН, 2006. 480 с.
3. Чукин В.В., Алдошкина Е.С., Вахнин А.В. и др. Мониторинг интегрального содержания водяного пара в атмосфере ГНСС-сигналами // Ученые записки РГГМУ. 2010. №12. С.51-60.
4. Thayer G.D. An improved equation for the radio refractive index of air // Radio Science. 1974. Vol.9(10). P.803-807.
5. Смирнов В.М. Радиофизические методы исследований и мониторинга ионосферы Земли/Плазменная гелиофизика / Под ред. Л.М. Зеленого и И.С. Веселовского. - М.: ФИЗМАТЛИТ, 2008, т.2. С.350-367.
6. Яковлев О.И., Павельев А.Г., Матюгов С.С. Спутниковый мониторинг Земли: Радиозатменный мониторинг атмосферы и ионосферы. - М.: Книжный дом «ЛИБРОКОМ», 2010. 208 с.
7. Тихонов А.Н., Арсенин В.Я. Методы решения некорректных задач. - М.: Наука, 1986.
8. Обрезкова И.В. Использование межуровенных корреляционных связей метеорологических полей для уточнения расчетов содержания водяного пара ч атмосфере // Успехи современного естествознания. 2010. №8. С.9-10.
9. Eresmaa R. Exploiting ground-based measurements of the global positioning system for numerical weather prediction // Finnish Meteorological Institute Contribution. 2007. №61. 140 р.
10. Азизов А.А., Гайкович К.П., Кашкаров С.С., Черняева М.Б. Использование сигналов навигационных ИСЗ для определения параметров атмосферы // Известия ВУЗов. Радиофизика. 1998. Т.41, №9. С.1093-1116.
11. Wickert I., Schmidt Т., Beyerle G., Kőnig R., Reugber Ch., and Jakowski N. "The radio occultation experiment aboard CHAMP: Operational data analysis and validation of vertical atmospheric profiles". J. Meteorol. Soc. Japan, 82(1B), 2004.
12. Hajj G.A., Ao C.O., lijima B.A., Kuang D., Kursinski E.R., Mannucci A.J., Meehan Т.К., Romans L.J., M. de la Torre Juarez, Yunck T.P. (2004) CHAMP and SAC-C atmospheric occultation results and intercomparisons. J. Geophys. Res., 109, D06109, dot: 10.129/2003JD003909.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2015 |
|
RU2601387C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| Способ зондирования ионосферы и тропосферы | 2018 |
|
RU2693842C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ПЛАЗМЕННОГО СЛОЯ ГЕОМАГНИТНОГО ХВОСТА И ИОНОСФЕРЫ ЗЕМЛИ | 2017 |
|
RU2656617C1 |
| Способ зондирования ионосферы и устройство для его реализации | 2020 |
|
RU2764782C2 |
| Способ краткосрочного прогноза землетрясений по данным вертикального зондирования ионосферы с ионозонда | 2017 |
|
RU2676235C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2018 |
|
RU2683113C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2016 |
|
RU2624634C1 |
| СПОСОБ ЗОНДИРОВАНИЯ СЕЙСМООРБИТАЛЬНЫХ ЭФФЕКТОВ И ВАРИАЦИЙ ПЛОТНОСТИ ВЕРХНЕЙ АТМОСФЕРЫ | 2019 |
|
RU2705161C1 |
Изобретение относится к геофизике и предназначен для мониторинга окружающей среды, обеспечения радиосвязи и навигации, геодезических измерений, информационного обеспечения сельского хозяйства и здравоохранения. Технический результат состоит в повышении точности и надежности определения параметров ионосферы и тропосферы, определении по сигналам космических аппаратов. Для этого учитывают данные с ионозондов на КА, данные со станций наклонного зондирования ионосферы, моделей ионосферы и тропосферы, расчитывают поля распределения интегральной концентрации заряженных частиц, профиля электронной концентрации в ионосфере над пунктом зондирования, вертикального профиля влажности и плотности воздуха в тропосфере над пунктом зондирования. Комплекс содержит наземные и бортовые приемные антенные устройства для приема сигналов с навигационных космических аппаратов (НКА) ГЛОНАСС/GPS/Galileo, геостационарных космических аппаратов (КА) и КА зондирования ионосферы и тропосферы, наземные и бортовые навигационные приемники сигналов. 3 н.п. ф-лы, 9 ил.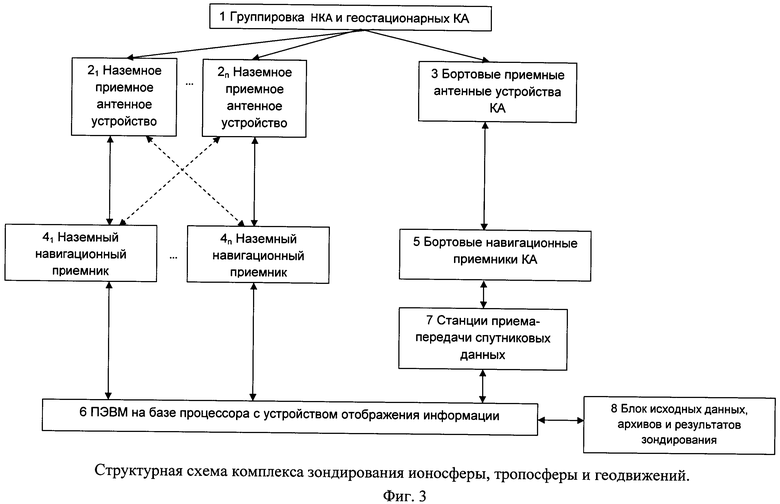
1. Комплекс зондирования ионосферы и тропосферы с возможностью расчета геодвижений, содержащий наземные и бортовые, например космического аппарата, приемные антенные устройства для приема сигналов с космических аппаратов (КА) ГЛОНАСС/GPS/Galileo, геостационарных КА и КА зондирования ионосферы и тропосферы, наземные и бортовые навигационные приемники сигналов с указанных КА, ПЭВМ оператора на базе процессора с устройством отображения информации, который скоммутирован с наземными и бортовыми навигационными приемниками через приемопередающую станцию спутниковых данных, со станциями зондирования, электронными архивами гелиогеофизических геодинамических и метеорологических данных, при этом процессор выполнен с возможностью: управления приемными антенными устройствами в зависимости от уровня сигнал/шум путем обработки поступающих с выходов навигационных приемников сигналов и заданных сетевых планов приема информации;
конвертирования и дешифрования принимаемых сигналов, расчета координат, прогностического положения и подспутниковой точки КА, координат приемных антенных устройств; расчета значений полной электронной концентрации в ионосфере, их осреднение и коррекция;
- расчета значений ионосферных и тропосферных задержек, тропосферной рефракции принимаемых сигналов КА и их коррекции по фактическому положению КА для коррекции рассчитанных значений полной электронной концентрации в ионосфере; расчета показателя преломления в тропосфере, который используется при оценке суммарной поправки тропосферной рефракции; восстановления профиля показателя преломления по рассчитанным тропосферным задержкам сигнала; расчета вертикального профиля влажности воздуха и вертикального профиля плотности воздуха из восстановленного профиля показателя преломления; восстановления поля распределения полной электронной концентрации в ионосфере; формирования региональных моделей ионосферы и тропосферы; расчета геодвижений по наблюдениям за характеристиками позиционирования реперных пунктов с приемными антенными устройствами сигналов КА; валидации, верификации и архивации получаемой информации в табличной и графической форме с автоматическим непрерывным режимом в реальном масштабе времени;
- вывода на устройство отображения информации ПЭВМ оператора результатов зондирования и расчетов.
2. Способ зондирования ионосферы, тропосферы с возможностью расчета геодвижений, включающий прием сигналов навигационных космических аппаратов (КА) ГЛОНАСС/GPS/Galileo, геостационарных КА и КА зондирования ионосферы и тропосферы через наземные и бортовые, например космического аппарата, приемные антенные устройства на соответствующие наземные и бортовые навигационные приемники, передачу принятых сигналов на ПЭВМ оператора на базе процессора с устройством отображения информации, при этом процессор выполнен с возможностью выполнения функций по п.1.
3. Процессор, выполненный с возможностью выполнять программу для реализации способа зондирования ионосферы, тропосферы с возможностью расчета геодвижений для комплекса зондирования по п.1.
| Устройство для автоматической загрузки сырца кирпича и тому подобных изделий в сушильную вагонетку | 1951 |
|
SU93995A1 |
| СИСТЕМА АВИАЦИОННОГО ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ЗАГРЯЗНЕНИЯ АТМОСФЕРЫ В КРЕЙСЕРСКОМ ПОЛЕТЕ | 2005 |
|
RU2304293C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ИОНОСФЕРЫ ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2177161C1 |
| ПНЕВМОКАМЕРНЫЙ НАСОС ДЛЯ ТРАНСПОРТИРОВКИ ПОРОШКООБРАЗНЫХ И МЕЛКОЗЕРНИСТЫХ МАТЕРИАЛОВ | 2006 |
|
RU2312808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ИОНОСФЕРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2421753C1 |
| Экономайзер | 0 |
|
SU94A1 |
| DE 4025306 A1, 13.02.1992. | |||

