Изобретение относится к геофизике и может использоваться в системе мониторинга окружающей среды, сейсмического и инфразвукового мониторинга, МЧС России, контроля околоземного космического пространства для диагностики положения эпицентральной зоны потенциальных источников протяженных перемещающихся ионосферных возмущений (ПИВ).
Среди источников ПИВ обычно рассматриваются сильные землетрясения, барические образования и связанные с ними опасные природные явления, магнитные бури и процессы в авроральном овале высокоширотной ионосферы Земли, прохождение терминатора, ядерные взрывы, вулканизм, цунами, запуски тяжелых ракет, сгорание космических объектов в атмосфере, в том числе взрывы метеороидов.
Из уровня техники известен «Способ зондирования ионосферы, тропосферы, геодвижений и комплекс для его реализации» (см. патент Российской Федерации №2502080 на изобретение, опубл. 20.12.2013), заключающийся в приеме и анализе характеристик сигналов глобальных навигационных спутниковых систем (ГНСС), геостационарных космических аппаратов (КА) для зондирования ионосферы и тропосферы. Способ позволяет обеспечить мониторинг ионосферы и тропосферы практически в режиме реального времени, получать информацию о возмущениях, происходящих в ионосфере. Однако известный способ не позволяет осуществлять диагностику положения эпицентральной зоны источника протяженных ПИВ. В имеется возможность диагностировать характеристики геодвижений на протяженных отрезках времени, но отсутствует возможность использования полученных текущих ошибок позиционирования для диагностики ПИВ.
Для реализации разработана «Программа расчета относительных значений полного электронного содержания по характеристикам ГНСС ГЛОНАСС/GPS/Galileo» для расчета характеристик ионосферы без расчета геодвижений и ошибок позиционирования. Однако программа не предназначена для определения эпицентральной зоны ПИВ и нет сведений о результатах валидации результатов.
Из уровня техники известен ряд близких по содержанию способов для зондирования источников ПИВ:
- «Способ обнаружения ионосферного возмущения и определения местоположения его источника» (см. патент Российской Федерации №2189051 на изобретение, опубл. 10.09.2002);
- «Способ обнаружения, измерения фазовой скорости и направления прихода ионосферного возмущения» (см. патент Российской Федерации №2189052 на изобретение, опубл. 10.09.2002);
- «Способ обнаружения, измерения фазовой скорости и направления прихода ионосферного возмущения» (см. патент Российской Федерации №2379709 на изобретение, опубл. 20.01.2010).
Основной особенностью известных из уровня техники технических решений является использование навигационных приемников для зондирования ионосферных задержек, игнорируются сигналы с геостационарных КА и других КА зондирования ионосферы. Используются две частоты для определения ионосферных задержек. Не предусмотрено использование дополнительных частот, используемых для передачи радиосигналов. При этом заявляется использование рассчитанных данных о полном электронном содержании (ПЭС) в ионосфере Земли, а фактически, из-за использования дифференциального метода используется только часть ПЭС, не учитываются инструментальные и аппаратные ошибки, эффекты тропосферной рефракции, эффекты многолучевости распространения зондирующих сигналов и переотражений радиосигналов из-за технологических особенностей реализации навигационных приемников. Эти эффекты могут быть информационными признаками для диагностики источников ПИВ.
В известных способах используется сеть двухчастотных навигационных приемников. В «Способе обнаружения ионосферного возмущения и определения местоположения его источника» (см. патент Российской Федерации №2379709 на изобретение, опубл. 20.01.2010) и в «Способе обнаружения, измерения фазовой скорости и направления прихода ионосферного возмущения» (см. патент Российской Федерации №2189052 на изобретение, опубл. 10.09.2002) требуется пространственная решетка двухчастотных приемников сигналов спутниковых радионавигационных систем ГЛОНАСС/GPS с размером апертуры, соответствующей зоне Френеля источника возмущений. Последнее заранее определить сложно либо необходимо использовать какие-то исходные предположения. Возможность использования для этой цели одночастотных приемников не рассматривается.
Исходя из этого, необходимо изыскивать другие подходы для измерений характеристик ПИВ, не ограничиваясь данными о рассчитываемом относительном ПЭС в ионосфере и возможности использования одной частоты принимаемых сигналов, что существенно удешевляет стоимость приемных устройств.
В известных способах диагностики ПИВ используется суммирование потенциальных детектируемых в ПЭС сигналов без учета их морфологии и технологических сигналов ГНСС. Для нахождения координат источника возмущений используется решение системы уравнений, описывающих семейство физически оправданных сферических волновых фронтов.
Подобные возникающие в практической реализации затруднения, в том числе при определении порогового уровня принимаемого сигнала в измеренных значениях ПЭС, неопределенности в аппаратной и инструментальных ошибках используемых навигационных приемников, присущи аналогу: «Способ обнаружения, измерения фазовой скорости и направления прихода ионосферного возмущения» (см. патент Российской Федерации №2379709 на изобретение, опубл. 20.01.2010). При этом так называемая приемная решетка технологически должна быть ориентирована на орбитальное движение навигационных КА, амплитуда дешифрируемых сигналов в характеристиках ПЭС сложным образом зависит от интенсивности источника возмущений ионосферы, игнорируются эффекты тропосферной рефракции, которые принимаются малыми, использование дифференциального метода в расчетах приводит к пренебрежению эффектов многолучевости и переотражений при распространении радиосигналов по трассе КА - навигационный приемник.
Технологии использования навигационного приемника в вышеуказанном аналоге не предусматривают учет и возможность диагностики возмущений нейтральной атмосферы, что обусловливает существенную, до 50%, потерю информации о состоянии среды по трассам распространения радиосигналов с КА.
Для преодоления вышеуказанных недостатков предлагается анализировать данные, на прием которых, собственно, ориентирован навигационный приемник - характеристики позиционирования и навигационные определения. При этом приемо-вычислительное устройство навигационного приемника, по сути, является детектором волновых возмущений атмосферы и ионосферы по сигналам (первичным преобразователям) видимого комплекса навигационных КА ГЛОHACC/GPS/Galileo и других космических навигационных систем, геостационарных КА. Определяемые навигационным приемником географические псевдокоординаты более стабильны, чем в вышеуказанных аналогах и вычисляемые дифференциальным методом ионосферные задержки, которые, в свою очередь, также могут учитываться в предлагаемом способе расчете мгновенных характеристик и ошибок позиционирования. На фоне относительно стабильных и обычно известных координат стационарного навигационного приемника легче диагностировать ошибки позиционирования, обусловленные источниками ПИВ, нежели малые вариации ПЭС (2).
Целью заявленного изобретения является определение положения эпицентральной зоны источника и скорости распространения ПИВ по вызванным искажениям принимаемых сигналов космических навигационных систем рассчитываемым ошибкам позиционирования навигационных приемников.
Физической основой эффектов, предлагаемых для регистрации в заявленном способе, является распространение возмущений атмосферы от потенциального источника в виде электромагнитных, ударных, инфразвуковых, акустико-гравитационных волн. При этом обычно считается, что ПИВ являются откликом ионосферы на прохождение внутренних гравитационных волн (ВГВ), которые представляют собой волны плотности нейтральных частиц атмосферы.
В соответствии с пространственно-временными масштабами и скоростью перемещения, ПИВ разделяют на два класса: крупномасштабные (КМ ПИВ) и среднемасштабные (СМ ПИВ). Существование КМ ПИВ принято связывать с распространяющимися в ионосфере крупномасштабными ВГВ, которые генерируются авроральными электроструями при их резком усилении во время магнитосферных возмущений. Данные волновые возмущения имеют характерные временные периоды порядка часа, длину волны от нескольких сотен до нескольких тысяч километров и горизонтальные фазовые скорости 300-1000 м/с. СМ ПИВ генерируются различными источниками в нижней атмосфере, связанными с метеорологическими процессами, движением солнечного терминатора и т.д. СМ ПИВ имеют периоды от 10 мин до 1 ч, характерные горизонтальные масштабы 100-300 км и фазовые скорости порядка 100-300 м/с. Данный тип волновых возмущений может иметь всенаправленное движение, однако чаще всего удается выделить преобладающее направление. Как правило, СМ ПИВ имеют наклон фронта около 45° вниз относительно плоскости горизонта.
В различных публикациях приводятся отличающиеся значения скоростей ПИВ даже в рамках одного класса возмущений. В большинстве случаев измеряется только горизонтальная компонента скорости. Измерения полного вектора скорости ПИВ редки. При описании отдельного класса возмущений (СМ или КМ ПИВ) используется некоторый диапазон наиболее вероятных значений амплитуд, длин волн, скоростей и направлений перемещения, вероятность появления возмущений.
По экспериментальным оценкам скорость распространения крупномасштабных ПИВ, инициированных запуском тяжелых ракет, достигает в Е-слое ионосферы 600-800 м/с. Близкие к этим оценки получены для распространения ПИВ от эпицентральной зоны землетрясений по вариациям ПЭС. Для масштабных источников атмосферных возмущений, например для сильных землетрясений с магнитудой М>6,5, отмечено формирование радиального распространения ПИВ от эпицентральной зоны, что физически обосновано морфологией геосфер.
Для среднемасштабных ПИВ и гравитационных атмосферных волн скорость распространения почти вдвое меньше. Подобные оценки получены для распространения ПИВ, инициированных взрывом Челябинского метеороида.
Амплитуда возмущений ПЭС зависит от направления распространения волновых возмущений атмосферы и ПИВ. Небольшие возмущения ПЭС при ПИВ имеют преимущественно N-образную форму. Подобная форма характерна для классической ударной волны. Но выделить подобные формы возмущений на фоне естественных шумов ПЭС сложно.
Вариации принимаемых навигационным приемником сигналов навигационных КА обусловливаются также термодинамическими возмущениями атмосферы от широкого спектра атмосферных волн. Прохождение через них сигналов космических аппаратов (КА) ГЛОНАСС/GPS/Galileo, других космических навигационных систем, геостационарных КА проявляется в характерных вариациях-ошибках рассчитываемых навигационных определений. При этом для повышения качества навигационных определений используются фильтры, в том числе приемо-вычислительных навигационных устройств, система дифференциальной коррекции и мониторинга целостности и ее зарубежные аналоги.
Использование сети стационарных навигационных приемников и оперативный анализ текущих ошибок позиционирования предлагается использовать для диагностики направления и скорости смещения обусловленных волновыми возмущениями атмосферы ПИВ, определения положения эпицентральной зоны источников ПИВ, подобно подходам, используемым, например, в артиллерийской звуковой разведке или в сейсмологии для определения эпицентральных зон землетрясений по времени прихода сейсмических и инфразвуковых волн.
Техническим результатом заявленного изобретения является повышение точности и надежности (анализируемые в предлагаемом способе сигналы в разы превышают фоновые вариации) определения скорости распространения ПИВ и положения эпицентральной зоны источника ПИВ по рассчитываемым характеристикам псевдопозиционирования сети наземных навигационных приемников сигналов с КА ГЛОНАСС/GPS/Galileo и геостационарных КА.
Технический результат достигается тем, что в выдаваемых навигационными приемниками результатах наблюдений за характеристиками сигналов навигационных КА определяется время появления характерных ошибок позиционирования от сильных атмосферных возмущений, инициированных, чаще всего, в неизвестный момент времени t0. По времени проявления признаков ПИВ на сети навигационных приемников рассчитываются скорости и траектории их движения, по которым диагностируется положение эпицентральной зоны источника возмущений атмосферы, инициировавшего ПИВ.
Разработанные алгоритмы обработки принимаемых сигналов и информации реализованы на базе процессора ПЭВМ с устройством отображения информации, который скоммутирован с сетью навигационных приемников сигналов КА, электронными архивами гелиогеофизических, геодинамических и метеорологических данных.
В соответствии с рассмотренными физическими представлениями о распространении возмущений атмосферы, для I разнесенных (

где <c(z)> - осредненная вертикальная скорость распространения атмосферных возмущений с уровня z0, по крайней мере, до высоты Е-слоя ионосферы (h), модуль определяет время распространения ПИВ от источника с координатами  для момента времени t0,
для момента времени t0, 
Неопределенность положения источника и время добегания атмосферных возмущений до ионосферы исключается дифференциальным методом.
В первом приближении возможно использование грубых оценок скорости распространения возмущений.
Для сети навигационных приемников возможно формирование системы линейных уравнений с соответствующим решением для оценки вектора горизонтальной скорости распространения ПИВ. Например, для трех точек - навигационных приемников:
Для большего количества региональных разнесенных пунктов с навигационными приемниками по полученным оценкам векторов скорости ПИВ, присваивая их точке пересечения медиан анализируемых треугольников, в вершинах которых находятся приемники, можно оценить зону пересечения восстановленных траекторий вдоль векторов
Для уточнения положения источника ПИВ целесообразно анализировать возмущения, инициированные электромагнитными эффектами источника ПИВ, использовать, по возможности, данные сейсмической или инфразвуковой сети наблюдений, косвенные источники информации, в том числе результаты радиотомографии ионосферы, так как выделенная зона пересечения восстановленных траекторий вдоль векторов скорости ПИВ содержит положение ионосферного эпицентра источников ПИВ.
Расчет эпицентральной зоны источника ПИВ заключается в следующем:
- формируется сеть точек - приемников сигналов навигационных КА (НКА) ГНСС, используемых для диагностики ПИВ (GPS/ГЛОНАСС, геостационарных КА и др.);
- производится прием сигналов НКА ГНСС каждым навигационным приемником сети;
- полученные данные передаются в центр обработки;
- обрабатываются характеристики сигналов и рассчитываются псевдокоординаты навигационных приемников;
- диагностируются типовые формы возмущений в изменении псевдокоординат навигационного приемника и аномальные ошибки позиционирования на фоне характерных вариаций с помощью метода «контрольных карт»;
- сравниваются задержки между временными метками выделенных ошибок позиционирования по сети используемых навигационных приемников;
- рассчитываются векторы скорости ПИВ и осуществляется их привязка к центру тяжести пространственных треугольников, в вершинах которых расположены используемые в расчетах навигационные приемники;
- производится построение траекторий распространения ПИВ и выделение зоны пересечения восстановленных линий геометрическим или аналитическим методом;
- уточняется положение эпицентральной зоны источников ПИВ по дополнительным источникам информации о произошедших событиях и состоянии окружающей среды;
- оценивается время активизации источника и уточняется характер его эволюции.
При наличии косвенной информации о времени события, инициировавшего ПИВ, уточняется оценка высотного положения источника атмосферных возмущений и скорости распространения ПИВ.
Для определения координат навигационного приемника достаточно данных об измерении псевдодальности и разности фаз сигналов видимой группировки КА на одной или нескольких частотах.
В случае если для одного или более КА одна из этих характеристик отсутствует, что может быть обусловлено возмущениями атмосферы, то эти КА не учитываются в дальнейших расчетах при определении координат навигационного приемника с помощью построения многогранной пирамиды с основанием из используемых КА с известными эфемеридами и вершиной-навигационным приемником.
Приемник сигналов НКА настроен на прием основных рабочих частот навигационных систем и обеспечивается питанием от сети или автономного источника. Радиосигналы с НКА представляют собой промодулированную кодом несущую частоту и эфемеридную информацию.
Сигналы с НКА принимаются через антенные устройства, усиливаются, фильтруются и поступают на электронную плату навигационного приемника, где они усиливаются, фильтруются и преобразуются в цифровой код. Характеристики навигационных сигналов на выходе навигационного приемника представляются в бинарной форме и/или в стандартном формате RINEX.
Навигационный приемник сигналов НКА обеспечивает автоматическое непрерывное в реальном масштабе времени определение и выдачу координат антенных устройств в системах координат WGS-84, ПЗ-90. Данные представляются в геодезической проекции с текущими отсчетами времени. В приемном устройстве может быть предусмотрено накопление данных и передача их для обработки по выделенным линиям (кабелям) на процессор.
При расчете характеристик позиционирования чаще всего используется ограниченное число НКА с оптимальным расположением над приемником, чтобы минимизировать влияние ионосферной и тропосферных ошибок распространения радиосигналов. Это важно, так как во многих навигационных приемниках устанавливаются ограничения на геометрию расположения КА, используемых для расчета характеристик позиционирования.
Для дешифрирования принимаемых навигационным приемником сигналов НКА GPS/ГЛОНАСС, конвертации в установленный формат и расчета оценок ошибок навигационных измерений, обусловленных влиянием ионосферы и тропосферы, используется процессор.
В стандартных навигационных приемниках на выходе обычно формируется последовательность данных, в которых могут быть рассчитанные характеристики позиционирования антенных устройств в системах координат WGS-84, ПЗ-90.
Перерасчет координат по характеристикам видимых КА, положение которых транслируется в принимаемых сигналах, позволяет получить дополнительную информацию о состоянии атмосферы над приемником.
В случае одночастотного навигационного приемника качество результатов зондирования ионосферы существенно ухудшается. При этом нельзя получить качественный вертикальный профиль распределения заряженных частиц, существенно отличающийся от распределений справочных моделей ионосферы. Перед расчетом координат навигационного приемника проверяется количество сигналов спутников, характеристики которых являются полными. Если таковых не хватает для определения координат навигационного приемника, координаты не рассчитываются. Фиксируется сбой.
Расчет координат осуществляется с помощью использования априорно известных координат навигационного приемника, имеющихся в заголовке RINEX файла, и рассчитываемых поправок к координатам навигационного приемника путем решения матричного уравнения:
- при 4-х наблюдаемых спутниках: X=-А-1l;
- при большем количестве наблюдаемых спутников: X=-(АТА)-1(АTl),
где X - вектор поправок к приближенным координатам навигационного приемника в декартовой системе координат, А - матрица единичных векторов топоцентрического направления на спутник:
где 

где Xi, Yi, Zi - координаты i спутника, (XA)0, (YA)0, (ZA)0 - априорные координаты приемника, 

l - матрица свободных членов:

где i - индекс спутника, 



Решение матричного уравнения проводится методом последовательных приближений с быстрой сходимостью расчетов уже при нескольких итерациях, что подтверждает выводы. В качестве априорных координат навигационного приемника используются координаты из заголовка формируемого навигационным приемником RINEX файла.
Дополнительным этапом уточнения положения эпицентральной зоны сильных возмущений атмосферы является сравнение (при наличии) с результатами наблюдений сейсмической и инфразвуковой сети, радиотомографическими разрезами атмосферы, данными МЧС России и другими источниками проверяемой информации.
В качестве примера реализации заявленного способа диагностики положения источника ПИВ предлагается использовать атмосферные эффекты от падения и взрыва Челябинского (Чебаркульского) метеороида, при котором станциями контроля атмосферного инфразвука на значительных удалениях от взрыва было зафиксировано прохождение пакета инфразвуковых волн. Сейсмические эффекты были слабые. Электромагнитный импульс от взрыва на некоторое время нарушил работу ретрансляторов мобильной связи.
Взрыв Челябинского метеорита был обусловлен превышением силы торможения при взаимодействии с атмосферой предела прочности вещества шелушащегося метеороида. Мощность взрыва оставила по разным оценкам 20÷500 кТ ТНТ, скорость входа в атмосферу 13,4÷19,6 км/с, высота разрушения 32,5-46,7 км, высота максимума мощности взрыва почти вдвое меньше.
При анализе морфологии инициированных возмущений ионосферы рассматривались возможные отклики прохождения метеороидом магнитопаузы, входа и выхода метеороида в верхнюю ионосферу, конуса ударных волн, формируемых в средней атмосфере сверхзвуковым движением и взрывом метеороида. Основным источником для инициирования ПИВ является взрыв метеороида в стратосфере, генерирование ударной, инфразвуковых, акустико-гравитационных волн и их распространение через 2-3 минуты до Е-слоя ионосферы. Инициированные возмущения геосфер могли проявиться в характеристиках сигналов ГЛОНАСС/GPS.
Наиболее близко к месту падения метеорита находились навигационные приемники сигналов ГНСС ГЛОНАСС/GPS в г. Екатеринбурге, в г. Тюмени и на станции Геофизической службы РАН «ARTU», расположенной на западном склоне Уральского хребта в 135 километрах к юго-западу от города Екатеринбурга, на базе Артинской сейсмической обсерватории. Екатеринбург находится примерно в 200 км от Челябинска.
Оценки относительных значений ПЭС в вертикальном столбе атмосферы в течение суток рассчитывались по технологии по видимым навигационным КА GPS с маской 10 градусов над горизонтом.
Анализировались отклонения от фоновых значений. Фоновый суточный ход ПЭС рассчитывался по предыдущим 15 суткам. Разность текущих и фоновых значений ПЭС нормировалась на значение среднеквадратического отклонения, полученного по предыдущим 15 суткам для анализируемого момента времени. Результаты использования такого подхода для ПЭС над станцией «ARTU» представлены на фиг. 1.
В полуденные часы после взрыва достаточно очевидно проявился эффект обеднения ионосферы. Этот эффект близок к критерию региональной ионосферной бури.
Из анализа вариаций ПЭС на фиг. 1 следует вывод об отсутствии явно выраженных возмущений в ПЭС.
При поиске ошибок характеристик позиционирования, рассчитываемых навигационными приемниками сигналов ГНСС ГЛОНАСС/GPS в Екатеринбурге, Тюмени и на станции Арту, диагностировались N-образные формы возмущений.
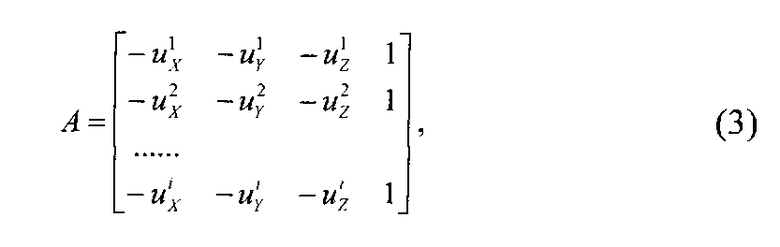
На фиг. 2 представлены оценки аномальных ошибок в изменении широты и долготы в Екатеринбурге 15.02.2013 г.
Для момента 3 h 31′ аномальная суммарная ошибка, не проявлявшаяся сутками ранее и сутками позже, вышла за границы 95% доверительного интервала, рассчитанного с учетом суточного хода оценок позиционирования в анализируемом отрезке времени по критерию Стьюдента.
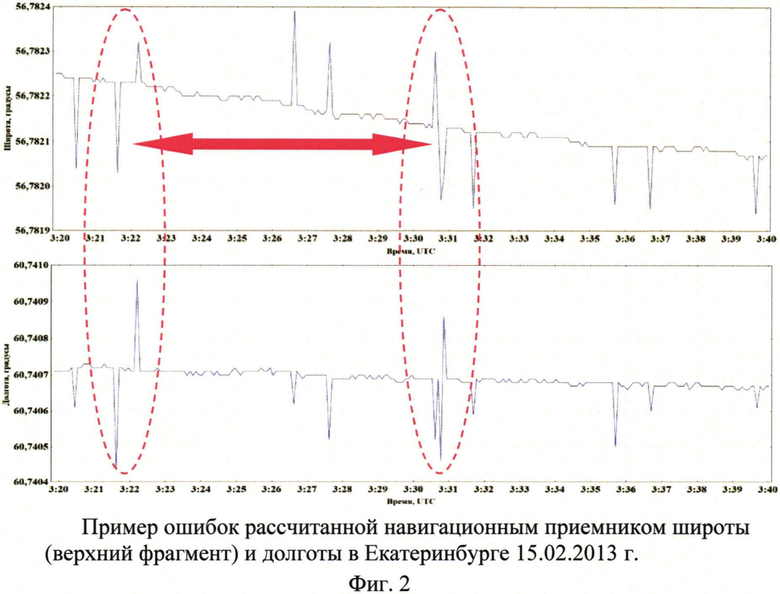
Красная стрелка горизонтальная демонстрирует время добегания ПИВ от эпицентральной зоны потенциального источника возмущений атмосферы. В Тюмени и на станции Арту 15.02.2013 г. аналогичные эффекты выявлены через 13 минут после взрыва (см. фиг. 3).
Изменение N-образной формы возмущения обусловлено низкой дискретностью наблюдений (30 с).
Эффекты ошибок позиционирования связаны с кратковременными искажениями сигналов спутников GPS. При этом в данных о вариациях ПЭС над приемниками не было сильных возмущений ионосферы.
Используя оценки скорости звука в Е-слое ионосферы и время запаздывания зарегистрированных возмущений для каждого приемника, с помощью геометрического метода можно сформировать дуги с равными удалениями потенциального источника ПИВ (см. фиг. 4).
Сформированный пересекающимися дугами криволинейный треугольник является зоной источника атмосферных возмущений - взрыва метеороида. На этот криволинейный треугольник ориентирована и восстановленная траектория прихода ПИВ навстречу рассчитанному вектору скорости распространения ПИВ из геометрического центра треугольника, с вершинами в пунктах расположения навигационных приемников.
За обобщенный эпицентр криволинейного треугольника можно принять точку, находящуюся на пересечении его медиан. Она находится юго-восточнее от официальных координат высвобождения основной энергии взрыва метеороида и располагается на линии траектории его полета.
Положение рассчитанной зоны источника ионосферного возмущения соответствует добеганию ударной акустической волны до нижних слоев ионосферы с последующим возбуждением в ней и распространением ПИВ.
Расхождение с официальными координатами взрыва обусловлено, возможно, заниженными расчетными скоростями распространения до ионосферы возмущений атмосферы от взрыва, а также тем, что генерация возмущений ионосферы началась до взрыва метеороида.
Преимущество заявленного способа обусловлено активным развитием сети навигационных приемников, доступностью и дешевизной получения с них результатов наблюдений за характеристиками сигналов навигационных КА, совершенствованием технологических решений по диагностике ПИВ, необходимостью учета возмущений атмосферы в характеристиках принимаемых навигационными приемниками сигналов ГНСС, оперативной оценкой положения эпицентра масштабных возмущений атмосферы, возможностью использования одночастотных измерений.
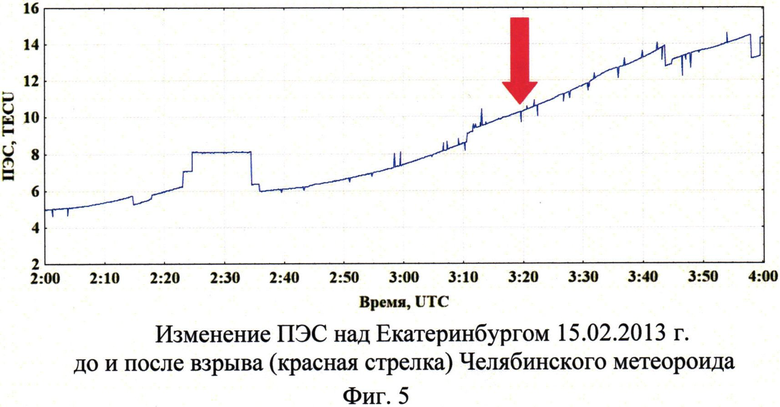
Кроме этого, в характеристиках относительного ПЭС, рассчитанных по технологии способа-аналога, не было выявлено значимых вариаций, обусловленных ПИВ (см. фиг. 5), что может использоваться при оценке других потенциальных аналогов заявленного способа.
Амплитуда всплесков N-образной формы после взрыва метеороида, которые могут быть связаны с ПИВ, мала, что затрудняет их диагностику.
При наличии других данных об источниках ПИВ, например радиотомографических разрезов ионосферы, есть возможность уточнять положение ПИВ и уточнять положение эпицентральной зоны источника ПИВ.
Комплекс для реализации заявленного способа объединяет сети приемных устройств и электронные архивы данных и содержит:
- наземные приемные антенные устройства для приема сигналов с НКА и КА зондирования ионосферы и тропосферы,
- наземные и бортовые навигационные приемники сигналов с указанных КА,
- центр обработки с ПЭВМ оператора на базе процессора с устройством отображения информации, который скоммутирован с наземными и бортовыми навигационными приемниками через приемопередающую станцию спутниковых данных, со станциями зондирования, электронными архивами гелиогеофизических, геодинамических и метеорологических данных.
Структурная схема комплекса, реализующего способ определения положения эпицентральной зоны источника и скорости распространения перемещающихся ионосферных возмущений, состоит из следующих коммуникационно связанных основных элементов (см. фиг. 6):
1 - группировка НКА и геостационарных КА;
2 - сеть наземных приемных устройств сигналов НКА;
3 - АРМ с ПЭВМ на базе процессора с устройством отображения информации;
4 - блок исходных данных, архивов и результатов зондирования.
Программное обеспечение для реализации заявленных функций комплекса выполнено на основе процессора для ОС Windows и Unix-подобных систем, серверных приложений и коммуникационной сети на основе Интернет-связи, оптоволокна, линий радиосвязи.
Комплекс для расчета характеристик ПИВ и эпицентральных зон из потенциальных источников по сигналам НКА выполнен с возможностью реализации следующих процедур (см. фиг. 7):
1. Планирование и управление приемом сигналов;
2. Идентификация и контроль полноты кодовых последовательностей в принимаемых сигналах;
3. Оценка характеристик сигналов навигационных спутниковых систем;
4. Обработка данных файлов формата RINEX и/или конвертация в бинарный формат;
5. Расчет фактических координат и прогностического положения НКА и их подспутниковых точек, координат наземных приемных антенных устройств в системах координат WGS-84, ПЗ-90;
6. Расчет полной электронной концентрации в ионосфере и поля распределения полного электронного содержания в ионосфере;
7. Расчет матрицы рассчитанных ошибок псевдопозиционирования;
8. Расчет характеристик ПИВ;
9. Диагностика положения зоны источника ПИВ;
10. Архивация получаемой информации;
11. Построение и анализ графиков и карт распространения ПИВ;
12. Диагностика аномалий в контролируемых характеристиках;
13. Вывод на устройство отображения ПЭВМ оператора результатов зондирования ПИВ.
Взаимное расположение элементов комплекса должно обеспечивать прием и дешифрирование сигналов НКА с минимизацией техногенных помех и может быть реализовано в подвижном или в стационарном варианте, что предпочтительнее, для получения большей точности результатов зондирования ПИВ. Форма выполнения элементов или устройства в целом определяются доступной элементной базой, имеющимися ресурсами, требованиями потребителя.
Сложностью реализации технологии зондирования характеристик псевдопозиционирования и ионосферы по сигналам НКА в конкретном пункте является необходимость валидации реализованных методик. Для этого должны создаваться региональные адаптируемые модели геодвижений, ионосферы и тропосферы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2015 |
|
RU2601387C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| Способ зондирования ионосферы и тропосферы | 2018 |
|
RU2693842C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ПЛАЗМЕННОГО СЛОЯ ГЕОМАГНИТНОГО ХВОСТА И ИОНОСФЕРЫ ЗЕМЛИ | 2017 |
|
RU2656617C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2018 |
|
RU2683113C1 |
| СПОСОБ ЗОНДИРОВАНИЯ СЕЙСМООРБИТАЛЬНЫХ ЭФФЕКТОВ И ВАРИАЦИЙ ПЛОТНОСТИ ВЕРХНЕЙ АТМОСФЕРЫ | 2019 |
|
RU2705161C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМУЩЕНИЙ ИОНОСФЕРЫ, ВЫЗВАННЫХ ЗАПУСКАМИ КОСМИЧЕСКИХ АППАРАТОВ | 2016 |
|
RU2624911C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2016 |
|
RU2624634C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2012 |
|
RU2490665C1 |



Изобретение относится к геофизике и может использоваться в системе мониторинга окружающей среды, сейсмического и инфразвукового мониторинга, МЧС России, контроля околоземного космического пространства для диагностики положения эпицентральной зоны потенциальных источников протяженных перемещающихся ионосферных возмущений (ПИВ). Достигаемый технический результат - повышение точности и надежности определения скорости распространения ПИВ и положения эпицентральной зоны источника ПИВ. Способ определения положения эпицентральной зоны источника и скорости распространения ПИВ заключается в том, что: принимают сетью рассредоточенных по поверхности Земли навигационных приемников, синхронизированных по времени, электромагнитные сигналы от группировки космических аппаратов (КА); передают принятые данные в центр обработки с ПЭВМ оператора на базе процессора с устройством отображения информации, где: рассчитывают время прохождения электромагнитных сигналов от каждого КА к каждому навигационному приемнику; рассчитывают характеристики псевдопозиционирования навигационных приемников; рассчитывают ошибки и изменения ошибок позиционирования навигационных приемников; определяют время прохождения фронта ПИВ, при этом: время получения сигнала о прохождении фронта ПИВ устанавливают отдельно для каждого навигационного приемника и определяют его по времени появления в течение нескольких секунд сочетания знакопеременных экстремумов ошибок его позиционирования; скорость распространения ПИВ определяют путем осреднения скоростей перемещения ПИВ между парами из трех любых заранее выбранных навигационных приемников, а положение эпицентральной зоны источника ПИВ определяют по зоне пересечения прямых, направление которых определено векторами осредненных скоростей, полученных для каждых трех заранее выбранных навигационных приемников. 7 ил.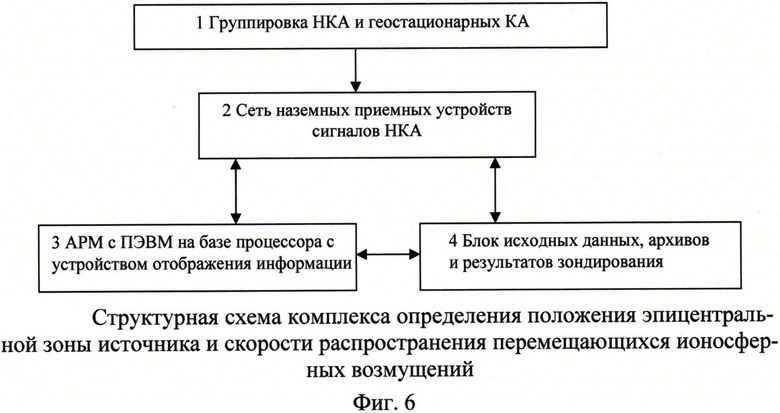
Способ определения положения эпицентральной зоны источника и скорости распространения перемещающихся ионосферных возмущений (ПИВ), заключающийся в том, что:
- принимают сетью рассредоточенных по поверхности Земли навигационных приемников, синхронизированных по времени, электромагнитные сигналы от группировки космических аппаратов (КА);
- передают принятые данные в центр обработки с ПЭВМ оператора на базе процессора с устройством отображения информации, где:
- рассчитывают время прохождения электромагнитных сигналов от каждого КА к каждому навигационному приемнику;
- рассчитывают характеристики псевдопозиционирования навигационных приемников;
- рассчитывают ошибки и изменения ошибок позиционирования навигационных приемников;
- и определяют время прохождения фронта ПИВ,
отличающийся тем, что:
- время получения сигнала о прохождении фронта ПИВ устанавливают отдельно для каждого навигационного приемника и определяют его по времени появления в течение нескольких секунд сочетания знакопеременных экстремумов ошибок его позиционирования;
- скорость распространения ПИВ определяют путем осреднения скоростей перемещения ПИВ между парами из трех любых заранее выбранных навигационных приемников;
- положение эпицентральной зоны источника ПИВ определяют по зоне пересечения прямых, направление которых определено векторами осредненных скоростей, полученных для каждых трех заранее выбранных навигационных приемников.
| СПОСОБ ОБНАРУЖЕНИЯ ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЕГО ИСТОЧНИКА | 2000 |
|
RU2189051C2 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ, ИСПОЛЬЗУЮЩИЕ ТРИ НЕСУЩИХ РАДИОСИГНАЛА, ПЕРЕДАВАЕМЫХ СПУТНИКОМ, И ИОНОСФЕРНЫЕ КОРРЕКЦИИ | 2003 |
|
RU2318222C2 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2008 |
|
RU2379709C1 |
| US 20130050024 A1, 28.02.2013 | |||
| KR 2011076156 A, 06.07.2011 | |||
| US 20110050492 A1, 03.03.2011 | |||
| CN 0103592653 A, 19.02.2014 | |||

