Область техники, к которой относится изобретение
Заявленные технические решения объединены единым изобретательским замыслом, относятся к области контрольно-измерительной техники и могут быть использованы при бесконтактном контроле параметров, режимов работы и технического состояния радиоэлектронных систем.
Уровень техники
Известен способ диагностирования, основанный на регистрации изменения тока питания объекта контроля (Жердев Н.К., Креденцер Б.П., Белоконь Р.Н. Контроль устройств на интегральных схемах. - Киев: Техника, 1986. - С. 87). Данный способ заключается в том, что ток питания любого элемента объекта контроля зависит от технического состояния этого элемента, поэтому при его переходе из одного состояния в другое изменяется общий ток, потребляемый объектом контроля. Принцип локализации отказавшего элемента при реализации способа заключается в подаче на вход объекта контроля импульса определенной длительности, при этом проверяемые элементы, входящие в объект контроля, должны быть включены последовательно. В том случае, если все элементы исправны, при их последовательном срабатывании происходит также последовательное изменение тока питания объекта контроля. В случае отказа первого элемента значение тока питания не изменяется ни разу, при отказе второго элемента значение тока изменяется однократно и т.д. Таким образом, номер отказавшего элемента (j) может быть определен по количеству изменений (N) значения тока питания объекта контроля: j=N+1. Из чего следует, что число изменений значения тока питания контролируемого объекта однозначно зависит от номера отказавшего элемента.
К недостаткам данного способа можно отнести отсутствие возможности определения реального технического состояния объекта контроля в виду того, что измерения должны выполняться при выключенном объекте с использованием специальных генераторов и дополнительного оборудования, необходимого для формирования на входе контролируемого объекта импульса определенной длительности.
Известен способ неразрушающего контроля изделий (Марков А.А. и др. Патент РФ №2184373. МПК G01N 29/04, опубл. 27.06.2002, бюл. №18), при реализации которого осуществляют неоднократный контроль изделия, сканируя изделие при идентичных условиях с определенными временными интервалами между сканированиями. Сигналы контроля на браковочном уровне, получаемые при сканировании, регистрируют, анализируют путем сравнения сигналов при текущем и предыдущих сканированиях, по заданным критериям оценивают степень развития дефекта. При сканировании сигналы регистрируют также на дополнительных пороговых уровнях, находящихся ниже браковочного порогового уровня. При обнаружении сигналов, превышающих браковочный пороговый уровень, принимают во внимание и сигналы, полученные на данном участке контролируемого изделия при текущем и предыдущих сканированиях на амплитудных уровнях ниже браковочного порогового уровня. По результатам анализа принимают решение о степени опасности обнаруженного дефекта. Количество k дополнительных пороговых уровней регистрации, находящихся ниже браковочного порогового уровня, удовлетворяет условию k>1.
К недостаткам данного способа можно отнести большое время необходимое для контроля технического состояния контролируемого объекта и низкая чувствительность к малым отклонениям его параметров.
Наиболее близким по технической сущности к предлагаемому способу (прототипом), является способ распределенного контроля и адаптивного управления многоуровневой системой (Будко П.А. и др. Патент РФ №2450335, МПК G06F 15/00, G05B 23/02, опубл. 10.05.2012, бюл. №13), основанный на том, что при получении информации о техническом состоянии контролируемых систем предварительно устанавливают пороговые значения на контролируемые параметры каждого узла системы, измеряют обобщенный показатель качества в виде вектора переменных состояний на каждом из N узлов системы  где z1(t); z2(t); … zn(t) - значения измеренных параметров во времени (t), n=1, 2, …, N, сравнивают измеренные параметры с установленными пороговыми значениями, оценивают состояние системы по результатам сравнения и формируют управляющее воздействие на систему по результатам оценки. При этом пороговые значения на контролируемые параметры устанавливают на k уровнях управления, формируя k групп параметров, при этом вектор переменных состояний в n-мерном пространстве признаков разбивают на несколько k систем признаков
где z1(t); z2(t); … zn(t) - значения измеренных параметров во времени (t), n=1, 2, …, N, сравнивают измеренные параметры с установленными пороговыми значениями, оценивают состояние системы по результатам сравнения и формируют управляющее воздействие на систему по результатам оценки. При этом пороговые значения на контролируемые параметры устанавливают на k уровнях управления, формируя k групп параметров, при этом вектор переменных состояний в n-мерном пространстве признаков разбивают на несколько k систем признаков 
 которые измеряют на каждом из k уровней управления системой, сравнивают измеренные признаки k групп параметров с предварительно заданными пороговыми значениями, оценивают состояние системы в несколько этапов, причем на первом этапе, используют локальную информацию о состоянии каждого узла, по которой обнаруживают путем сравнения с порогом x0 нарушение заданного режима функционирования, а на последующих этапах определяют тип нарушения путем измерения всей доступной измерению информации на локальном, региональном, либо глобальном контурах управления, при этом признаки
которые измеряют на каждом из k уровней управления системой, сравнивают измеренные признаки k групп параметров с предварительно заданными пороговыми значениями, оценивают состояние системы в несколько этапов, причем на первом этапе, используют локальную информацию о состоянии каждого узла, по которой обнаруживают путем сравнения с порогом x0 нарушение заданного режима функционирования, а на последующих этапах определяют тип нарушения путем измерения всей доступной измерению информации на локальном, региональном, либо глобальном контурах управления, при этом признаки 
 после преобразования сравнивают соответственно с порогами yo, …, γo и если величины
после преобразования сравнивают соответственно с порогами yo, …, γo и если величины  не превышают порогов уо, …, γо то принимают решение о работоспособности системы, в противном случае фиксируют действительно неработоспособное состояние системы и вырабатывают управляющий сигнал на применение мер воздействия на источник случайных возмущений и распределенную систему по k уровням управления, при этом пороговые значения на контролируемые параметры устанавливают с учетом априорных сведений о текущем состоянии системы на всех уровнях управления, замыкая контур обратной связи телекоммуникационной системы.
не превышают порогов уо, …, γо то принимают решение о работоспособности системы, в противном случае фиксируют действительно неработоспособное состояние системы и вырабатывают управляющий сигнал на применение мер воздействия на источник случайных возмущений и распределенную систему по k уровням управления, при этом пороговые значения на контролируемые параметры устанавливают с учетом априорных сведений о текущем состоянии системы на всех уровнях управления, замыкая контур обратной связи телекоммуникационной системы.
Недостатком данного способа-прототипа является то, что в процессе выработки управляющего воздействия постоянно используется вся, доступная измерению информация, что в распределенной системе (на глобальном контуре контроля) не только приводит к избыточности измерительной информации, но и приводит к тому, что в процессе функционирования сети (измерительной сети, сенсорной сети) все измерительные средства находятся в активном состоянии. При этом под термином распределенный контроль подразумевается контроль территориально распределенной телекоммуникационной системой, осуществляемый на локальном или глобальном уровнях контроля. Многоэтапная оценка технического состояния системы не учитывает аварийные и предаварийные состояния контролируемых объектов распределенной системы контроля, а также не определяет классы технических состояний данных объектов. Кроме того, в системе не производится статистический анализ разносторонних признаков, характеризующих контролируемые объекты распределенной системы контроля.
Раскрытие изобретения
Техническим результатом, достигаемым с помощью заявленного способа многоуровневого комплексного контроля технического состояния радиоэлектронных систем (РЭС), является:
- повышение достоверности результатов идентификации технического состояния объектов контроля;
- расширение области применения технических средств контроля и диагностики;
- определение классов технических состояний объектов контроля;
- идентификация отклонений параметров контролируемых объектов от нормы по нескольким признакам (температура, напряженность магнитного поля, напряжение, оптический контроль технического состояния).
При рассмотрении способа многоуровневого комплексного контроля технического состояния радиоэлектронных систем под формулировкой «радиоэлектронной системы» следует понимать совокупность всего радиоэлектронного оборудования на всех уровнях разукрупнения, то есть элементов радиоэлектронной системы.
В заявленном способе указанный технический результат достигается тем, что в известном способе многоуровневого комплексного контроля технического состояния радиоэлектронных систем, заключающемся в том, что K-уровневую радиоэлектронную систему, включающую n(k) радиоэлектронных элементов на k уровнях, где k=1, 2, …, K, a n(k)=1, 2, …, N(k), техническое состояние которых характеризуют j параметрами, и техническое состояние радиоэлектронной системы наблюдают на K уровнях. Дополнительно, при функционировании радиоэлектронных систем, находящихся в условиях случайных выходов значений контролируемых параметров за допустимые пределы, предварительно, на основе статистического анализа измеряемых параметров элементов радиоэлектронных систем формируют М(k, n) групп диапазонов достоверности, определяемых пороговыми значениями контролируемых параметров, соответствующих работоспособному оборудованию. На заведомо работоспособных экземплярах по разносторонним признакам создают их «рабочий профиль», представляющий количественные значения признаков работоспособных экземпляров оборудования и запоминают в виде эталонных матриц  технического состояния. Далее измеряют мгновенные значения сигналов с выходов всех датчиков, при числе измерений N и оцифровывают. Запоминают измеренные сигналы в виде векторов цифровой последовательности длиной N, из которых составляют матрицу технического состояния g1, …, gn размерностью N×N, которую сравнивают поэлементно с эталонными матрицами. Вычисляют уровень предаварийного состояния контролируемого элемента радиоэлектронной системы, идентифицируемый скоростью выхода контролируемого параметра за пределы соответствующего диапазона достоверности. По наибольшему числу совпадений элементов сравниваемых матриц и уровню предаварийного состояния оценивают техническое состояние элементов радиоэлектронной системы. Распознают место отказа путем сопоставления признаков наблюдаемого элемента с признаками эталонного элемента радиоэлектронной системы. По результатам сравнения присваивают класс технического состояния радиоэлектронной системы.
технического состояния. Далее измеряют мгновенные значения сигналов с выходов всех датчиков, при числе измерений N и оцифровывают. Запоминают измеренные сигналы в виде векторов цифровой последовательности длиной N, из которых составляют матрицу технического состояния g1, …, gn размерностью N×N, которую сравнивают поэлементно с эталонными матрицами. Вычисляют уровень предаварийного состояния контролируемого элемента радиоэлектронной системы, идентифицируемый скоростью выхода контролируемого параметра за пределы соответствующего диапазона достоверности. По наибольшему числу совпадений элементов сравниваемых матриц и уровню предаварийного состояния оценивают техническое состояние элементов радиоэлектронной системы. Распознают место отказа путем сопоставления признаков наблюдаемого элемента с признаками эталонного элемента радиоэлектронной системы. По результатам сравнения присваивают класс технического состояния радиоэлектронной системы.
При этом формируют М(k, n) групп диапазонов достоверности, определяемых пороговыми значениями контролируемых параметров и результатом анализа измерительной информации, полученной в ходе наблюдения за изменением среднего уровня контролируемых параметров, с учетом статистики Хотеллинга. Измеряют мгновенные значения сигналов с выходов всех датчиков получением измерительной информации об элементе радиоэлектронной системы, основанной на j разносторонних признаках: электромагнитном отклике, влажности воздуха, напряжении и теплограмме (двухмерной температурной «картине»), полученные, соответственно, от датчиков напряженности магнитного поля, влажности воздуха, напряжения и тепловизора [Джексон Р.Г. Новейшие датчики. М.: Техносфера, 2007. - 384 с.]. Присваивают класс технического состояния радиоэлектронной системы согласно алгоритма распознавания классов элементов радиоэлектронной системы, включающего три этапа работы: обнаружения отказа радиоэлектронной системы, идентификации ошибок контроля и распознавание класса технического состояния радиоэлектронной системы.
Благодаря новой совокупности существенных признаков способа многоуровневого комплексного контроля технического состояния радиоэлектронных систем и введенной последовательности действий, основанной на анализе статистики выходов контролируемых параметров за пределы диапазона достоверности, на применении многоэтапной процедуры комплексного контроля параметров радиоэлектронного оборудования, определения класса технического состояния и места отказа в оборудовании, за счет чего обеспечивается повышение достоверности результатов идентификации технического состояния объектов контроля, расширение области применения технических средств контроля и диагностики радиоэлектронного оборудования.
Сущность предлагаемого способа многоуровневого комплексного контроля технического состояния РЭС состоит в представлении диагностического пространства, содержащего информационные признаки отказов РЭС в виде векторов средних измеренных параметров, формирующих матрицу технического состояния и статистику отклонений контролируемых параметров в допустимых пределах, характеризующие техническое состояние РЭС на нескольких уровнях. Фиксация результатов статистики отклонений контролируемых параметров в допустимых пределах осуществляется путем построения карты Хотеллинга [Клячкин В.Н., Карпунина И.Н., Федорова М.К. Оценка стабильности температурного режима компьютера. // Автоматизация процессов управления. 2016. №3 (45). С. 58-64.]. Выход статистики Хотеллинга за границу критической области - является основным критерием перехода РЭС из нормального состояния в предаварийное (аварийное) состояние.
При этом предлагается контроль технического состояния РЭС осуществить в два этапа:
на первом этапе (этапе анализа) на основе статистического анализа измеряемых параметров N элементов РЭС, формируют М(k, n) групп диапазонов достоверности, на заведомо работоспособных экземплярах по разносторонним признакам создают их «рабочий профиль», представляющий количественные значения признаков работоспособных экземпляров оборудования, запоминают в виде эталонных матриц  технического состояния. Затем измеряют мгновенные значения сигналов с выходов всех датчиков, при числе измерений N, оцифровывают, запоминают измеренные сигналы в виде векторов цифровой последовательности длиной N, из которых составляют матрицу технического состояния g1, …, gn размерностью N×N.
технического состояния. Затем измеряют мгновенные значения сигналов с выходов всех датчиков, при числе измерений N, оцифровывают, запоминают измеренные сигналы в виде векторов цифровой последовательности длиной N, из которых составляют матрицу технического состояния g1, …, gn размерностью N×N.
на втором этапе (этапе идентификации) поэлементно сравнивают полученную матрицу технического состояния g1, …, gn с эталонными матрицами  рабочего состояния элемента радиоэлектронной системы. Определяют уровень предаварийного состояния контролируемого элемента радиоэлектронной системы, идентифицируемый скоростью выхода контролируемого параметра за пределы диапазона достоверности. Идентифицируют техническое состояние РЭС по наибольшему числу совпадений элементов сравниваемых матриц и уровню предаварийного состояния. Идентифицируют место отказа и определяют класс технического состояния РЭС.
рабочего состояния элемента радиоэлектронной системы. Определяют уровень предаварийного состояния контролируемого элемента радиоэлектронной системы, идентифицируемый скоростью выхода контролируемого параметра за пределы диапазона достоверности. Идентифицируют техническое состояние РЭС по наибольшему числу совпадений элементов сравниваемых матриц и уровню предаварийного состояния. Идентифицируют место отказа и определяют класс технического состояния РЭС.
Краткое описание чертежей
Заявленный способ многоуровневого комплексного контроля технического состояния РЭС поясняется чертежами, на которых показаны:
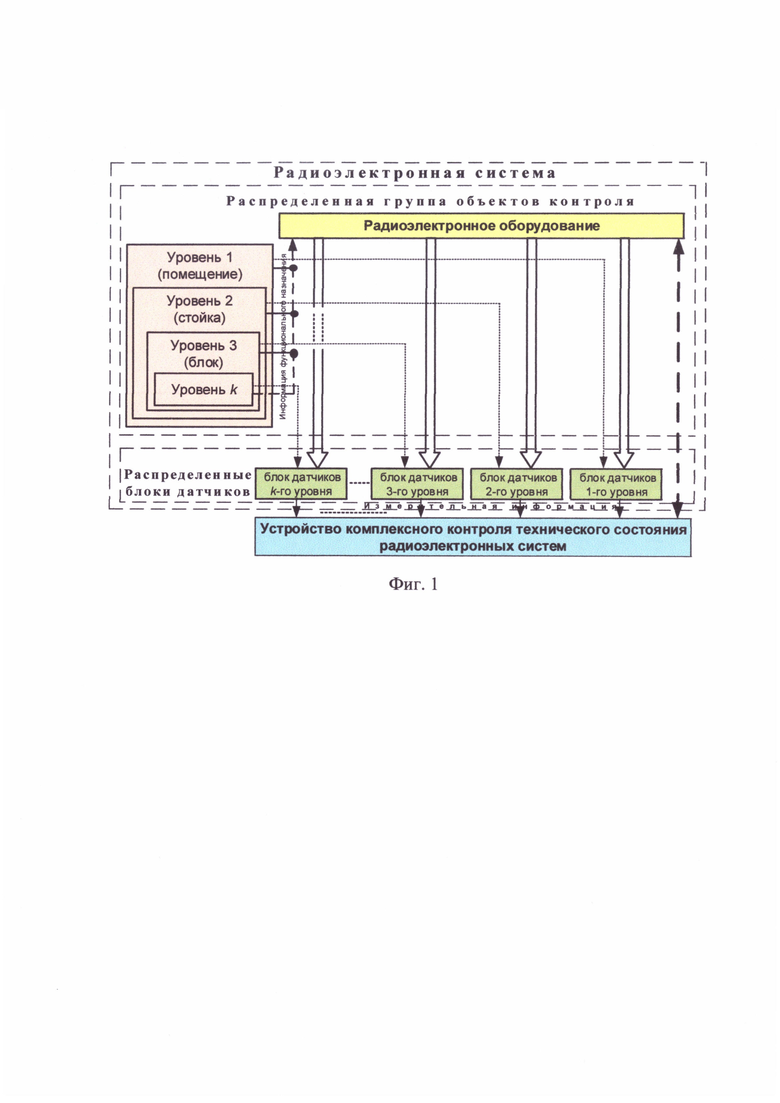
на фиг. 1 - реализация способа многоуровневого комплексного контроля технического состояния РЭС;
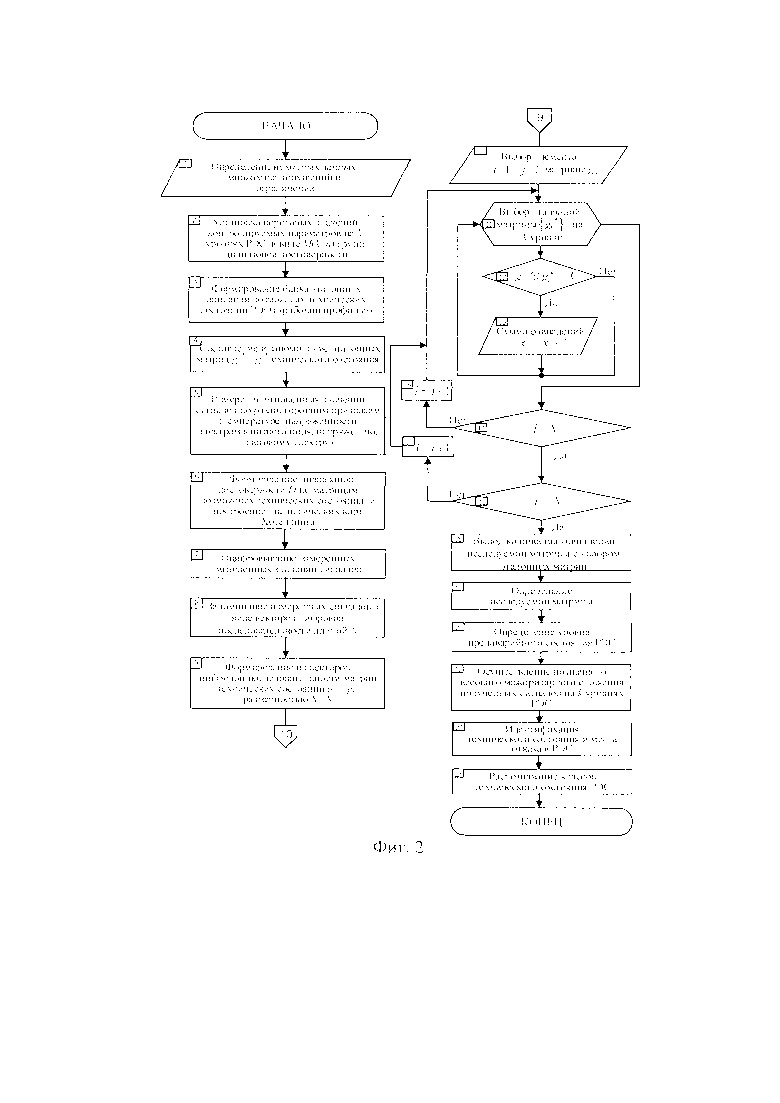
на фиг. 2 - алгоритм, реализующий двухэтапный способ комплексного контроля технического состояния РЭС;
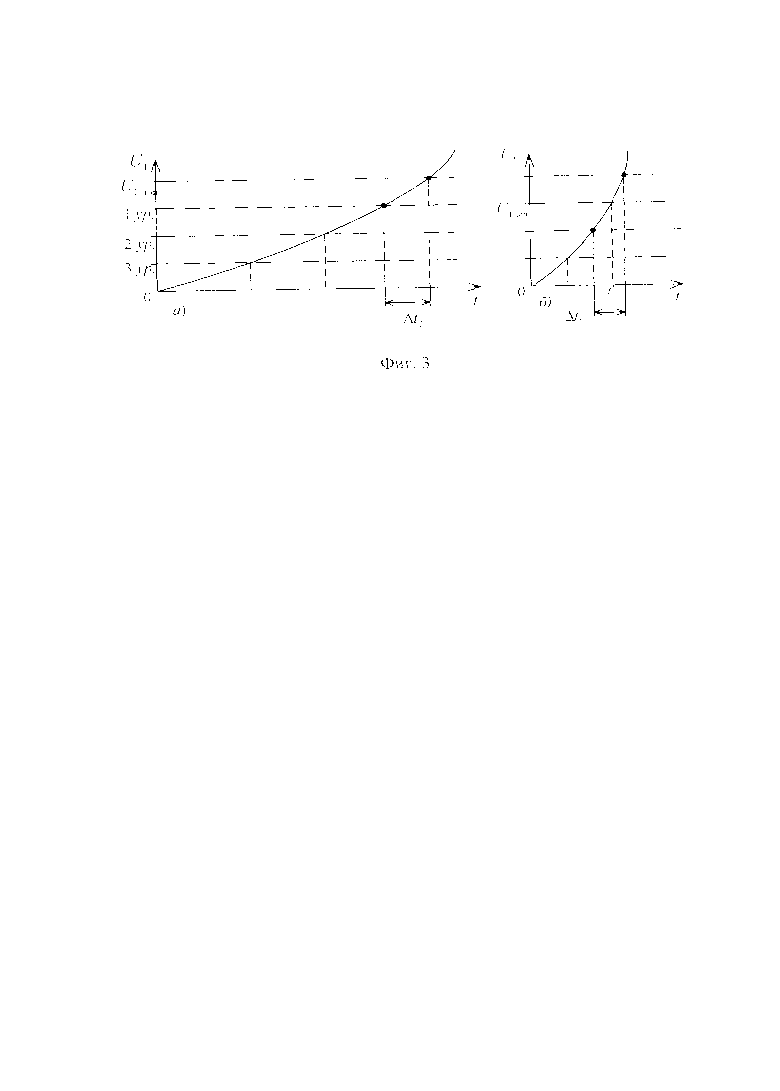
на фиг. 3 - графики, поясняющие зависимость установки значений допусков от динамики выхода контролируемого параметра за допустимые пределы;
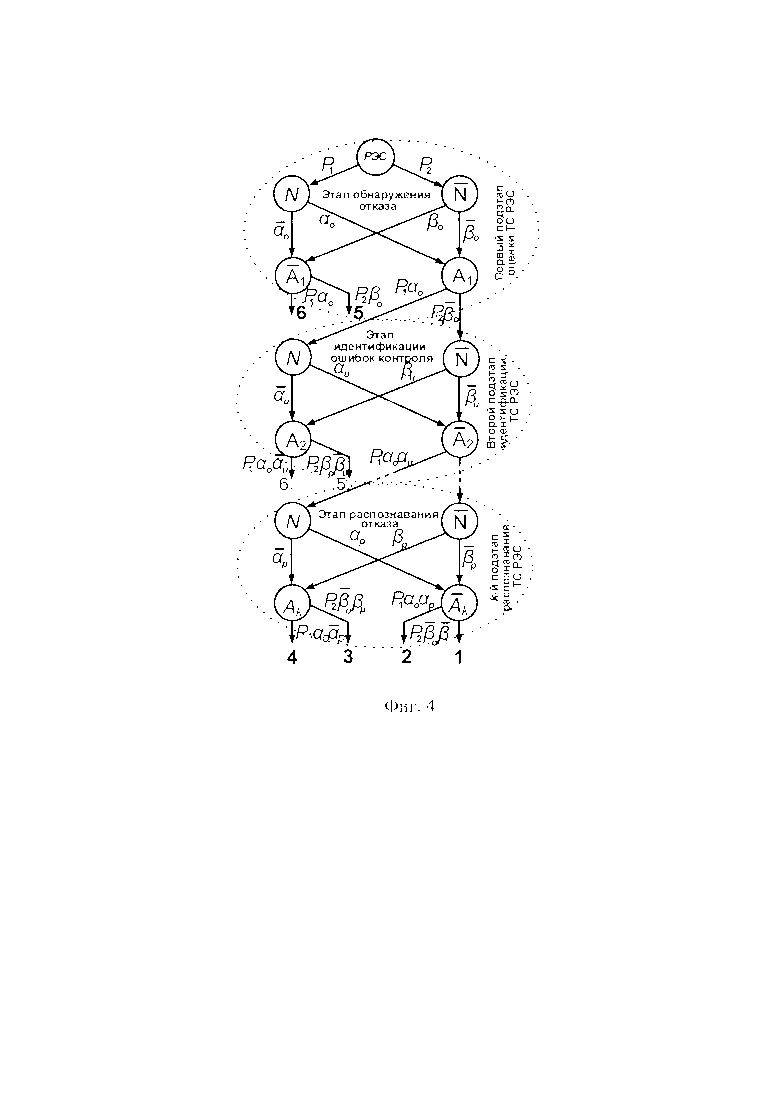
на фиг. 4 - вероятностный граф распознавания технических состояний РЭС, реализующий поэтапный принцип принятия решения;
на фиг. 5 - алгоритм распознавания классов технических состояний РЭС.
Осуществление изобретения
Реализация заявленного способа многоуровневого комплексного контроля технического состояния РЭС объясняется алгоритмом, представленным на фиг. 2.
Первым этапом представленного алгоритма является этап анализа, включающего девять подэтапов (шагов).
На шаге 1 определяют исходные данные, ограничения и допущения.
На шаге 2 проводят статистический анализ измеряемых параметров N элементов радиоэлектронных систем, путем построения карты Хотеллинга.
На шаге 3 формируют М(k, n) групп диапазонов достоверности на k уровнях РЭО (платы, блока, стойки, отсека и др.).
На шаге 4 определяют количественные значения разносторонних признаков на заведомо работоспособных экземплярах РЭО.
На шагах 5-6 создают «рабочий профиль» работоспособных экземпляров РЭО и запоминают его в виде эталонных матриц g1* … gn* технического состояния.
На шаге 7 измеряют мгновенные значения сигналов, поступающих с датчиков напряженности магнитного поля, влажности воздуха, напряжения, тепловизора, пропорционально изменяемым во времени напряженности внешнего магнитного поля, влажности воздуха, напряжению и температуре, создаваемых контролируемым элементом РЭО в рабочем режиме.
На шагах 8-9 оцифровывают измеренные мгновенные значения сигналов, поступающих с датчиков и запоминают в виде векторов цифровой последовательности длиной N, из которых формируют матрицу ТС g1, …, gn размерностью N×N.
Вторым этапом способа является идентификация, включающего пятнадцать подэтапов (шагов).
На шаге 10 осуществляют выбор элемента матрицы gn текущего технического состояния радиоэлектронного оборудования.
На шаге 11 осуществляют выбор элемента эталонной матрицы gn*.
На шаге 12 принимают решение на поэлементное сравнение элемента исследуемой матрицы ТС с одним из элементов эталонных матриц ТС, соответствующего исследуемой. При этом под сравнением понимается операция сложения по модулю два информационных содержаний сравниваемых элементов матриц.
На шаге 13 при совпадении значений в элементах сравниваемых матриц происходит суммирование числа совпадений.
На шаге 14-17 осуществляется сравнение элементов матриц снизу вверх и слева направо.
На шаге 18 осуществляют отображение количества совпадений элементов исследуемой матрицы с набором элементов эталонных матриц, j=N, i=N (шаги 14, 15), после того, как будет оценен последний элемент сравниваемых матриц.
На шаге 19 определяется матрица по наибольшему числу совпадений исследуемой матрицы gn с одной из эталонных матриц технического состояния gn*; при условии, что совпало 97±2% от общего количества элементов матриц ТС.
На шаге 20 вычисляют уровень предаварийного состояния контролируемого элемента РЭО, идентифицируемый скоростью выхода контролируемого параметра за пределы соответствующего диапазона достоверности (рис. 3).
На шаге 21 оценивают состояние системы в несколько этапов (рис. 4), причем на первом этапе, используют локальную информацию о состояниях каждого элемента k-го уровня РЭО, по которой обнаруживают путем сравнения с диапазоном достоверности нарушение заданного режима функционирования (нормальное или аварийное состояние). На последующих этапах оценки, определяют уровень предаварийного состояния контролируемого объекта, путем измерения всей доступной измерению информации на уровне блока (модуля).
На шаге 22 распознают место отказа путем сопоставления признаков наблюдаемого элемента с признаками эталонного элемента радиоэлектронной системы.
На шаге 23 осуществляют распознавание классов ТС РЭО, согласно алгоритма распознавания классов ТС РЭО МРТК (рис. 5). Алгоритм имеет три этапа работы: обнаружения отказа РЭО, идентификации ошибок контроля (на каждом из k уровней РЭО) и распознавания класса ТС РЭО.
Специфика реализации способа многоуровневого комплексного контроля технического состояния радиоэлектронных систем (рис. 1) такова, что распределенная группа объектов контроля, может представлять собой отдельную подсистему в виде k-уровней (помещение, стойка, блок, консоль, …, плата), соответствующих глобальному, региональному и локальному уровням, при этом в данном случае организуются система контроля технического состояния на каждом уровне. Объединяющим элементом являются обозначенные в схеме блоки датчиков, позволяющие осуществлять съем измерительной информации с объектов контроля, установленных на k уровнях. Это необходимо для формирования результирующего решения о работоспособности объектов контроля. С учетом этого, название изобретения подчеркивает многоуровневость контроля радиоэлектронных систем.
Установка значений допусков на контролируемые параметры осуществляется в зависимости от динамики их выхода за допустимые пределы (фиг. 3). Причем, установлено правило: чем выше скорость изменения (выхода) контролируемого параметра, тем ниже должен опуститься пороговый уровень (например, на уровень ниже), а соответственно - уменьшиться диапазон достоверности (фиг. 3, б).
Этапы прохождения оценки РЭС представлены в вероятностном графе состояния системы (фиг. 4), где Р1=1-Р2 - априорная вероятность отсутствия аварийной ситуации; Р2 - априорная вероятность появления аварийной ситуации; α - ложный отказ (ошибка первого рода); β - необнаруженный отказ (ошибка второго рода); N - нормальная работа; А - авария (отказ); О - этап обнаружения отказа; Р - этап распознавания отказа; k=1, 2, …, K - уровни РЭС; при этом классы технического состояния РЭС обозначены 1, 2, …, 51, 61, где  2=P1α0αP…αk;
2=P1α0αP…αk; 
Распознавание классов технического состояния элементов РЭС осуществляют согласно алгоритма (фиг. 5), включающего этап обнаружения отказа РЭС, этап идентификации ошибок контроля (на каждом из k уровней РЭС) и этап распознавания класса технического состояния РЭС.
В нем в качестве исходных данных используются: 1) пороговое значение обобщенного показателя технического состояния РЭС  ; 2) пороговые значения на параметры
; 2) пороговые значения на параметры  элементов РЭС, используемых на различных (локальный, региональный, глобальный k-х, k=1, 2, …, K) уровнях ее функционирования; 3) измеренные значения обобщенного показателя состояния РЭС; 4) измеренные значения параметров технических устройств на каждом k-м уровне разукрупнения РЭС (локальном, региональном, глобальном).
элементов РЭС, используемых на различных (локальный, региональный, глобальный k-х, k=1, 2, …, K) уровнях ее функционирования; 3) измеренные значения обобщенного показателя состояния РЭС; 4) измеренные значения параметров технических устройств на каждом k-м уровне разукрупнения РЭС (локальном, региональном, глобальном).
На этапе обнаружения отказа осуществляется контроль обобщенного (комплексного) показателя РЭС  по заданному в исходных данных пороговому значению параметра . При выполнении заданного условия (например, >) формируется сигнал о нормальном функционировании системы (РЭС).
по заданному в исходных данных пороговому значению параметра . При выполнении заданного условия (например, >) формируется сигнал о нормальном функционировании системы (РЭС).
При невыполнении заданного условия (выходе значения обобщенного показателя за пределы допуска) осуществляется измерение j (j=1, 2, …, J) значений показателей технического состояния (параметров) на локальном уровне РЭС, которые на следующем этапе сравнивают с пороговыми значениями Λ(х)>х0 для идентификации места отказа. По результатам сравнения определяется нормальное состояние РЭС (N) с вероятностью Р1=P(N) либо его аномальное состояние  с вероятностью
с вероятностью  Причем идентификацию места отказа на первом (1) (локальном) уровне РЭС осуществляют с учетом ошибок первого (α1) и второго (β1) рода, которые соответствуют вероятности «ложной тревоги» и, «пропуску нарушения». В литературе данные вероятности называют соответственно риском заказчика и риском потребителя [Будко П.А., Жуков Г.А., Винограденко A.M., Гойденко В.К. Определение аварийного состояния морского робототехнического комплекса по многоэтапной процедуре контроля на основе использования вейвлет-преобразований. // Морская радиоэлектроника. 2016. №4 (58). С. 2-7.]. Физический смысл ошибок первого и второго рода заключается в том, что вероятность «ложной тревоги» равна величине наступления события, когда система контроля правильно зафиксировала нормальное (N) техническое состояние ТКС (с вероятностью Р1), однако ошибочно классифицировано состояние аварии (А), и, в свою очередь, вероятность «пропуску нарушения» равна величине наступления события, когда система контроля правильно зафиксировала аномальное техническое состояние
Причем идентификацию места отказа на первом (1) (локальном) уровне РЭС осуществляют с учетом ошибок первого (α1) и второго (β1) рода, которые соответствуют вероятности «ложной тревоги» и, «пропуску нарушения». В литературе данные вероятности называют соответственно риском заказчика и риском потребителя [Будко П.А., Жуков Г.А., Винограденко A.M., Гойденко В.К. Определение аварийного состояния морского робототехнического комплекса по многоэтапной процедуре контроля на основе использования вейвлет-преобразований. // Морская радиоэлектроника. 2016. №4 (58). С. 2-7.]. Физический смысл ошибок первого и второго рода заключается в том, что вероятность «ложной тревоги» равна величине наступления события, когда система контроля правильно зафиксировала нормальное (N) техническое состояние ТКС (с вероятностью Р1), однако ошибочно классифицировано состояние аварии (А), и, в свою очередь, вероятность «пропуску нарушения» равна величине наступления события, когда система контроля правильно зафиксировала аномальное техническое состояние  РЭС (с вероятностью Р2), но при этом в результате идентификации отказа классифицировано отсутствие аварии -
РЭС (с вероятностью Р2), но при этом в результате идентификации отказа классифицировано отсутствие аварии -  Аналогично происходит выявление нарушения работоспособности системы (ее аварийного состояния - А) и на последующих k=1, 2, …, K контурах контроля и управления системой (на втором (региональном) уровне - А2, вплоть до глобального - AK). Переход на следующий уровень идентификации отказа осуществляется при выполнении условия что на предыдущем уровне было обнаружено аварийное состояние (А) и измеренные значения параметров данного уровня вышли за пределы установленных (заданных) допусков.
Аналогично происходит выявление нарушения работоспособности системы (ее аварийного состояния - А) и на последующих k=1, 2, …, K контурах контроля и управления системой (на втором (региональном) уровне - А2, вплоть до глобального - AK). Переход на следующий уровень идентификации отказа осуществляется при выполнении условия что на предыдущем уровне было обнаружено аварийное состояние (А) и измеренные значения параметров данного уровня вышли за пределы установленных (заданных) допусков.
Так при обнаружении аномального состояния системы  на локальном уровне осуществляется измерение значения параметров регионального уровня и сравнение их с заданными пороговыми значениями Λ(у)>y0. При обнаружении аномального состояния системы
на локальном уровне осуществляется измерение значения параметров регионального уровня и сравнение их с заданными пороговыми значениями Λ(у)>y0. При обнаружении аномального состояния системы  на региональном уровне осуществляется измерение значения параметров глобального уровня и сравнение их с заданными пороговыми значениями Λ(γ)>γ0. При этом ошибки первого и второго рода имеют место быть на каждом уровне многоуровневой РЭС: α2 и β2; α3 и β3; …; αK и βK.
на региональном уровне осуществляется измерение значения параметров глобального уровня и сравнение их с заданными пороговыми значениями Λ(γ)>γ0. При этом ошибки первого и второго рода имеют место быть на каждом уровне многоуровневой РЭС: α2 и β2; α3 и β3; …; αK и βK.
На завершающем этапе распознавания класса технического состояния РЭС в результате работы системы контроля на K уровнях разукрупнения многоуровневой РЭС выявляются финальные вероятности состояния системы, показанные на фиг. 5 и означающие:
«1» - система заблокирована, отказ обнаружен и распознан;
«2» - система работоспособна, ложное обнаружение и распознание;
«3» - система заблокирована, отказ обнаружен, но не распознан;
«4» - система работоспособна, ложное обнаружение не распознано;
«5» - система заблокирована, отказ не обнаружен;
«6» - система работоспособна, признана работоспособной.
Причем классы технического состояния «1», «2», «3», «4» многоуровневой РЭС относятся к завершающему этапу контроля, а классы «51», «61» - присутствуют на каждом из K уровней. Для Заказчика наиболее предпочтительным являются классы «6» и «1», когда РЭС работоспособна и признана работоспособной, или РЭС заблокирована, отказ обнаружен и распознан.
Для подтверждения возможности достижения указанного технического результата было проведено математическое моделирование, показавшее высокую эффективность заявленного технического решения.
Достоверность результатов контроля (оценки и идентификации) технического состояния элементов РЭС D1 в заявленном техническом решении значительно выше, чем при осуществлении аналогичного контроля объекта в прототипе. С учетом получения измерительной информации от нескольких источников, где число источников не меньше 2-х, можно сделать вывод, что достоверность получения информации о техническом состоянии объекта контроля заявленного технического решения D1, в 1,2-1,5 раза выше, чем у прототипа D2, причем D1>>D2.
Таким образом, заявляемый способ многоуровневого комплексного контроля технического состояния радиоэлектронных систем обладает существенным положительным эффектом, заключающимся в повышении достоверности результатов идентификации технического состояния РЭО и расширении области применения технических средств контроля и диагностики.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОМПЛЕКСНОГО КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ | 2018 |
|
RU2702129C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОГО МОНИТОРИНГА СОСТОЯНИЯ ИНФОРМАЦИОННО-ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ | 2024 |
|
RU2841123C1 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ СРЕДСТВ СВЯЗИ И НАВИГАЦИОННОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2773048C1 |
| СПОСОБ РАСПРЕДЕЛЕННОГО КОНТРОЛЯ И АДАПТИВНОГО УПРАВЛЕНИЯ МНОГОУРОВНЕВОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450335C1 |
| СПОСОБ ОЦЕНКИ ЭФФЕКТИВНОСТИ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ В УСЛОВИЯХ ДЕЙСТВИЯ НЕПРЕДНАМЕРЕННЫХ ПОМЕХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2686582C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАДИОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2006 |
|
RU2324213C1 |
| СПОСОБ ПРЕДАВАРИЙНОГО, АВАРИЙНОГО И ПОСТАВАРИЙНОГО КОНТРОЛЯ ИСТОЧНИКОВ РАДИАЦИОННОЙ, ХИМИЧЕСКОЙ И ВЗРЫВОПОЖАРНОЙ ОПАСНОСТИ В ГЕРМЕТИЧНЫХ ОБИТАЕМЫХ ОБЪЕКТАХ, ПРЕИМУЩЕСТВЕННО ПОДВОДНЫХ ЛОДКАХ, И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2596063C1 |
| Способ оценки эффективности интегрированных радиоэлектронных комплексов в условиях действия непреднамеренных помех и система для его реализации | 2019 |
|
RU2727343C1 |
| СПОСОБ КОНТРОЛЯ ДЕМАСКИРУЮЩИХ ПРИЗНАКОВ СИСТЕМЫ СВЯЗИ | 2009 |
|
RU2419153C2 |
| Способ обработки результатов радиомониторинга | 2019 |
|
RU2736329C1 |

Предложенное изобретение относится к области контрольно-измерительной техники и может быть использовано при бесконтактном контроле технического состояния радиоэлектронных систем (РЭС). Сущность предлагаемого способа многоуровневого комплексного контроля технического состояния РЭС состоит в представлении диагностического пространства, содержащего информационные признаки отказов РЭС в виде векторов средних измеренных параметров, формирующих матрицу технического состояния и статистику отклонений контролируемых параметров в допустимых пределах, характеризующие техническое состояние РЭС на нескольких уровнях. Фиксация результатов статистики отклонений контролируемых параметров в допустимых пределах осуществляется путем построения карты Хотеллинга. Выход статистики Хотеллинга за границу критической области является основным критерием перехода РЭС из нормального состояния в предаварийное (аварийное) состояние. При этом предлагается контроль технического состояния РЭС осуществить в два этапа: на первом этапе (этапе анализа) на основе статистического анализа измеряемых параметров N элементов РЭС, формируют М(k, n) групп диапазонов достоверности, на заведомо работоспособных экземплярах по разносторонним признакам создают их «рабочий профиль», представляющий количественные значения признаков работоспособных экземпляров оборудования, запоминают в виде эталонных матриц  технического состояния. Затем измеряют мгновенные значения сигналов с выходов всех датчиков, при числе измерений N, оцифровывают, запоминают измеренные сигналы в виде векторов цифровой последовательности длиной N, из которых составляют матрицу технического состояния g1, …, gn размерностью N×N; на втором этапе (этапе идентификации) поэлементно сравнивают полученную матрицу технического состояния g1, …, gn с эталонными матрицами
технического состояния. Затем измеряют мгновенные значения сигналов с выходов всех датчиков, при числе измерений N, оцифровывают, запоминают измеренные сигналы в виде векторов цифровой последовательности длиной N, из которых составляют матрицу технического состояния g1, …, gn размерностью N×N; на втором этапе (этапе идентификации) поэлементно сравнивают полученную матрицу технического состояния g1, …, gn с эталонными матрицами  рабочего состояния элемента радиоэлектронной системы. Определяют уровень предаварийного состояния контролируемого элемента РЭС, идентифицируемый скоростью выхода контролируемого параметра за пределы диапазона достоверности. Идентифицируют техническое состояние РЭС по наибольшему числу совпадений элементов сравниваемых матриц и уровню предаварийного состояния. Идентифицируют место отказа и определяют класс технического состояния РЭС. Техническим результатом, наблюдаемым при реализации заявленного решения, является повышение достоверности идентификации технического состояния РЭС, расширение области применения технических средств контроля и диагностики, определение классов технических состояний объектов контроля и идентификация отклонений их параметров от нормы по нескольким признакам. 3 з.п. ф-лы, 5 ил.
рабочего состояния элемента радиоэлектронной системы. Определяют уровень предаварийного состояния контролируемого элемента РЭС, идентифицируемый скоростью выхода контролируемого параметра за пределы диапазона достоверности. Идентифицируют техническое состояние РЭС по наибольшему числу совпадений элементов сравниваемых матриц и уровню предаварийного состояния. Идентифицируют место отказа и определяют класс технического состояния РЭС. Техническим результатом, наблюдаемым при реализации заявленного решения, является повышение достоверности идентификации технического состояния РЭС, расширение области применения технических средств контроля и диагностики, определение классов технических состояний объектов контроля и идентификация отклонений их параметров от нормы по нескольким признакам. 3 з.п. ф-лы, 5 ил.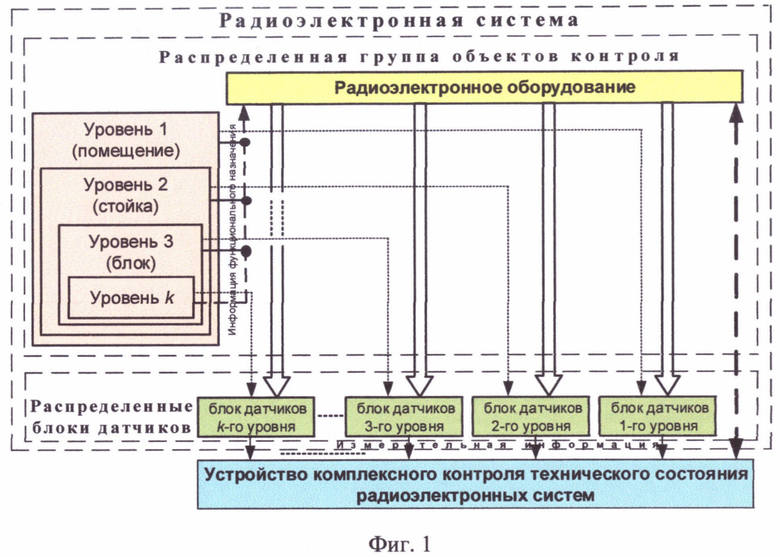
1. Способ многоуровневого комплексного контроля технического состояния радиоэлектронных систем, заключающийся в том, что K-уровневую радиоэлектронную систему, включающую n(k) радиоэлектронных элементов на k уровнях, где k=1,2, …, K, a n(k)=1, 2, …, N(k), техническое состояние которых характеризуют j параметрами, и техническое состояние радиоэлектронной системы наблюдают на K уровнях, отличающийся тем, что дополнительно при функционировании радиоэлектронных систем, находящихся в условиях случайных выходов значений контролируемых параметров за допустимые пределы, предварительно на основе статистического анализа измеряемых параметров элементов радиоэлектронных систем формируют М(k, n) групп диапазонов достоверности, на заведомо работоспособных экземплярах по разносторонним признакам создают их «рабочий профиль», представляющий количественные значения признаков работоспособных экземпляров оборудования и запоминают их в виде эталонных матриц  технического состояния, измеряют мгновенные значения сигналов с выходов всех датчиков, при числе измерений N, оцифровывают, запоминают измеренные сигналы в виде векторов цифровой последовательности длиной N, из которых составляют матрицу текущего технического состояния g1, …, gn размерностью N×N, которую сравнивают поэлементно с эталонными матрицами, вычисляют уровень предаварийного состояния контролируемого элемента радиоэлектронной системы, идентифицируемый скоростью выхода контролируемого параметра за пределы соответствующего диапазона достоверности, по наибольшему числу совпадений элементов сравниваемых матриц и уровню предаварийного состояния оценивают техническое состояние элементов радиоэлектронной системы, распознают место отказа путем сопоставления признаков наблюдаемого элемента с признаками эталонного элемента радиоэлектронной системы, по результатам сравнения присваивают класс технического состояния радиоэлектронной системы.
технического состояния, измеряют мгновенные значения сигналов с выходов всех датчиков, при числе измерений N, оцифровывают, запоминают измеренные сигналы в виде векторов цифровой последовательности длиной N, из которых составляют матрицу текущего технического состояния g1, …, gn размерностью N×N, которую сравнивают поэлементно с эталонными матрицами, вычисляют уровень предаварийного состояния контролируемого элемента радиоэлектронной системы, идентифицируемый скоростью выхода контролируемого параметра за пределы соответствующего диапазона достоверности, по наибольшему числу совпадений элементов сравниваемых матриц и уровню предаварийного состояния оценивают техническое состояние элементов радиоэлектронной системы, распознают место отказа путем сопоставления признаков наблюдаемого элемента с признаками эталонного элемента радиоэлектронной системы, по результатам сравнения присваивают класс технического состояния радиоэлектронной системы.
2. Способ по п. 1, отличающийся тем, что формируют М(k, n) групп диапазонов достоверности, определяемых пороговыми значениями контролируемых параметров, соответствующих работоспособному оборудованию, и результатом анализа измерительной информации, полученной в ходе наблюдения за изменением среднего уровня контролируемых параметров, с учетом статистики Хотеллинга.
3. Способ по п. 1, отличающийся тем, что измеряют мгновенные значения сигналов с выходов всех датчиков получением измерительной информации об элементе радиоэлектронной системы, основанной на j разносторонних признаках: электромагнитном отклике, влажности воздуха, напряжении и теплограмме (двухмерной температурной «картине»), полученные соответственно от датчиков напряженности магнитного поля, влажности воздуха, напряжения и тепловизора.
4. Способ по п. 1, отличающийся тем, что присваивают класс технического состояния радиоэлектронной системы согласно алгоритму распознавания классов элементов радиоэлектронной системы, включающему три этапа работы: обнаружения отказа радиоэлектронной системы, идентификация ошибок контроля и распознавание класса технического состояния радиоэлектронной системы.
| СПОСОБ РАСПРЕДЕЛЕННОГО КОНТРОЛЯ И АДАПТИВНОГО УПРАВЛЕНИЯ МНОГОУРОВНЕВОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450335C1 |
| Статья: "Реализация метода многоуровневого комплексного контроля технического состояния морского робототехнического комплекса", Ж | |||
| " Системы управления, связи и безопасности", номер 4, 2017 год | |||
| Статья: "Моделирование систем мониторинга технического состояния сложных технических объектов на основе методов теории энтропийных потенциалов", Научно-технический сборник, выпуск 7(146), 2018 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАДИОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2006 |
|
RU2324213C1 |
| МНОГОКАНАЛЬНОЕ ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И РЕГИСТРАЦИИ ОДНОКРАТНЫХ ИМПУЛЬСНЫХ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ | 2004 |
|
RU2293341C2 |
| Способ получения синтетического дубителя сульфированием продуктов конденсации фенолов с альдегидами | 1945 |
|
SU77935A1 |
| US 8670854 B2, 11.03 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

