Изобретение относится к области автоматизации информационно-управляющих систем управления и контроля за состоянием удаленных объектов, функционирующих в реальном масштабе времени и может быть использовано для обработки результатов радиомониторинга в сложной электромагнитной обстановке.
Известен способ обеспечения электромагнитной совместимости систем связи, описанный в Пат. РФ №2271067, МПК G01S 13/46, опубликованный 27.12.1998 г. Он заключается в идентификации групп конкретных передатчиков, которые могут работать одновременно на заданном частотном канале из диапазона рабочих частот с заданными параметрами излучаемых радиосигналов, обеспечивающих радиопокрытие обслуживаемой территории, не оказывая недопустимого воздействия на приемники других радиоэлектронных средств.
Способ-аналог обладает недостатками, связанными с отсутствием возможности идентификации объектов в заданном районе (обслуживаемой территории), включая радиоэлектронные средства (РЭС) с различными параметрами излучаемых радиосигналов, что в конечном счете не позволяет оценить общую радиоэлектронную и оперативную обстановку.
Известен способ оценки эффективности процесса разработки объектов военной техники, описанный в Пат. РФ №2282243, МПК G06T 17/50, G06N 5/50, опубл. 20.08.2006 г., бюл. №23. Он включает на подготовительном этапе формирование базы данных в составе первого массива с данными о физико-географических условиях заданного района, формирование компьютерных моделей объектов и занесении их в базу данных в виде второго массива данных:  - физических параметров объектов i-го типа, i=1, 2, …, I, фото или радиолокационных снимков Phi, формирование третьего массива данных с потенциальными данными об их пространственно-временных и количественных характеристиках и о технико-экономических показателях их работы, отображение полученной модели, а в процессе работы на основе полученных данных определение значения показателей боевого воздействия каждого объекта, задание цветовой шкалы преобразования показателей боевого воздействия, функционирования и представления каждой модели объекта в изображение, отображение данных об объектах в виде табличного и/или графического представления, выделение из второго и третьего массивов данных объектов, которые относят соответственно к первому и второму участникам военных действий, формирование на основе последних четвертого и пятого массивов данных, воспроизведение этапов итерационного процесса боевого взаимодействия моделей участников военных действий и отображения его на экране компьютера, при этом на каждом этапе этого процесса осуществляют формирование области боевого взаимодействия каждого объекта для каждого участника военных действий, анализ наличия совпадений сформированных областей цветокодовых изображений первой и второй моделей участников военных действий, при этом совпадения принимают за факт попадания в цель, фиксирование наличия и отсутствия попаданий, по которым оценивают результативность соответствующих объектов, занесение в базу данных пространственно-временных и количественных показателей объектов с полученной результативностью для каждого участника военных действий, формирование шестого массива данных на основе полученных результатов, отображение полученных результатов в виде диаграмм и ранжировка по убыванию результативности пространственно-временных и количественных показателей объектов, содержащиеся в шестом массиве, выделение групп объектов, характеристики которых соответствуют заданным условиям выбора, из которых формируют седьмой массив данных, занесение в последний данных о технико-экономических показателях разработки соответствующих объектов, формирование восьмого массива данных об экономических показателях разработки выделенной группы объектов.
- физических параметров объектов i-го типа, i=1, 2, …, I, фото или радиолокационных снимков Phi, формирование третьего массива данных с потенциальными данными об их пространственно-временных и количественных характеристиках и о технико-экономических показателях их работы, отображение полученной модели, а в процессе работы на основе полученных данных определение значения показателей боевого воздействия каждого объекта, задание цветовой шкалы преобразования показателей боевого воздействия, функционирования и представления каждой модели объекта в изображение, отображение данных об объектах в виде табличного и/или графического представления, выделение из второго и третьего массивов данных объектов, которые относят соответственно к первому и второму участникам военных действий, формирование на основе последних четвертого и пятого массивов данных, воспроизведение этапов итерационного процесса боевого взаимодействия моделей участников военных действий и отображения его на экране компьютера, при этом на каждом этапе этого процесса осуществляют формирование области боевого взаимодействия каждого объекта для каждого участника военных действий, анализ наличия совпадений сформированных областей цветокодовых изображений первой и второй моделей участников военных действий, при этом совпадения принимают за факт попадания в цель, фиксирование наличия и отсутствия попаданий, по которым оценивают результативность соответствующих объектов, занесение в базу данных пространственно-временных и количественных показателей объектов с полученной результативностью для каждого участника военных действий, формирование шестого массива данных на основе полученных результатов, отображение полученных результатов в виде диаграмм и ранжировка по убыванию результативности пространственно-временных и количественных показателей объектов, содержащиеся в шестом массиве, выделение групп объектов, характеристики которых соответствуют заданным условиям выбора, из которых формируют седьмой массив данных, занесение в последний данных о технико-экономических показателях разработки соответствующих объектов, формирование восьмого массива данных об экономических показателях разработки выделенной группы объектов.
Способ-аналог позволяет моделировать процесс ведения военных действий на основе компьютерных моделей объектов военной техники.
Однако, аналог обладает недостатками, ограничивающими его применение в области обработки результатов радиомониторинга. К их числу можно отнести:
отсутствует учет функционирующих РЭС, размещенных на объектах военной техники или работающей в их интересах;
не выполняется оценка электромагнитной доступности (ЭМД) к РЭС объектов;
отсутствует оценка текущей электромагнитной обстановки (ЭМО) в районе ведения радиомониторинга (РМ), формирование выводов по ней;
тип объектов по результатам РМ не определяется;
отсутствуют выводы о складывающейся оперативной обстановке (ОО) в заданном районе;
не осуществляется формирование полученных данных потребителям информации в формализованном виде о составе, состоянии и деятельности объектов в заданном районе на фоне карт ГИС.
Наиболее близким по своей технической сущности к заявленному является способ обработки результатов радиомониторинга, описанный в патенте РФ №2659486, МПК G06T 1/00 (2006.01), G01S 5/00 (2006.01), опубл. 02.07.2018, бюл. №19. Он заключается в том, что на подготовительном этапе формируют базу данных в составе первого массива с данными о физико-географических условиях заданного района, формируют компьютерные модели объектов и заносят их в базу данных в виде второго массива данных, содержащего физические параметры объекта i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi, формируют третий массив данных с потенциальными сведениями об их пространственно-временных и количественных характеристиках, общей площади заданного района S, площади элементарного участка Si, удовлетворяющего требованиям по размещению i-го объекта или его элемента, удалению каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами Dij, формируют четвертый массив данных с параметрами радиоэлектронных средств (РЭС): Δƒ, V, Tu, modeλ, τсп, τти, где Δƒ - диапазон рабочих частот, V - вид передачи, Tu - тип радио или радиотехнического средства, u=1, 2, … U, modeλ - режим функционирования РЭС, λ=1, 2, …, Λ; τсп - среднее время работы РЭС при выходе в эфир, τти - интервал времени пребывания u-го РЭС на одной позиции, пятый массив данных с параметрами узлов связи (УС) пунктов управления (ПУ): количеством n РЭС различных типов Tип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, шестой массив данных с оперативно-тактическими нормативами по размещению УС на местности: удалением УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного  и различных
и различных  уровней управления, временем пребывания УС на одной позиции Tти, и седьмой массив данных с H эталонными описаниями различных вариантов оперативной и соответствующих им электромагнитной обстановки (ЭМО), а в процессе работы дополнительно оценивают электромагнитную доступность (ЭМД) РЭС УС ПУ объектов РМ, сведения о которой записывают в восьмой массив данных, а с учетом всех восьми массивов базы данных оценивают текущую ЭМО, формируют девятый массив данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, (х,у)m, Vm, CSm, Tm, modem,
уровней управления, временем пребывания УС на одной позиции Tти, и седьмой массив данных с H эталонными описаниями различных вариантов оперативной и соответствующих им электромагнитной обстановки (ЭМО), а в процессе работы дополнительно оценивают электромагнитную доступность (ЭМД) РЭС УС ПУ объектов РМ, сведения о которой записывают в восьмой массив данных, а с учетом всех восьми массивов базы данных оценивают текущую ЭМО, формируют девятый массив данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, (х,у)m, Vm, CSm, Tm, modem,  dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, (х,у)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Tm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,
dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, (х,у)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Tm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,  - время работы РЭС;
- время работы РЭС;  - время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточняют местоположение обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображают полученные результаты в геоинформационной системе (ГИС), по результатам оценки ЭМО определяют локальные объединения (ЛО) РЭС, образующие УС ПУ, уточняют их местоположение с учетом пригодности участков Sr, к их развертыванию, и локальные объединения анализируемых объектов, образованные совокупностью УС ПУ отдельных частей, соединений и объединений, а результаты анализа ЭМО записывают в десятый массив данных, сравнивают полученные результаты текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО, принимают решение о сложившейся оперативной обстановке и вероятном местоположении оцениваемых объектов и их состоянии, а результаты оперативной и электромагнитной обстановки записывают в одиннадцатый массив данных, на основе которых далее формируют двенадцатый массив данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, в противном случае при невыполнении пороговых условий продолжают оценку текущей электромагнитной обстановки, а информацию об объектах и их состоянии из десятого массива данных используют для формирования одиннадцатого массива данных.
- время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточняют местоположение обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображают полученные результаты в геоинформационной системе (ГИС), по результатам оценки ЭМО определяют локальные объединения (ЛО) РЭС, образующие УС ПУ, уточняют их местоположение с учетом пригодности участков Sr, к их развертыванию, и локальные объединения анализируемых объектов, образованные совокупностью УС ПУ отдельных частей, соединений и объединений, а результаты анализа ЭМО записывают в десятый массив данных, сравнивают полученные результаты текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО, принимают решение о сложившейся оперативной обстановке и вероятном местоположении оцениваемых объектов и их состоянии, а результаты оперативной и электромагнитной обстановки записывают в одиннадцатый массив данных, на основе которых далее формируют двенадцатый массив данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, в противном случае при невыполнении пороговых условий продолжают оценку текущей электромагнитной обстановки, а информацию об объектах и их состоянии из десятого массива данных используют для формирования одиннадцатого массива данных.
Прототип обеспечивает принятие решения в автоматизированном режиме об оперативной обстановке в заданном районе, составе, состоянии и функционировании объектов на основе структурно-статистического анализа и априорных сведений, хранящихся в базе данных, результатов моделирования и анализа текущей электромагнитной обстановки.
Однако прототип обладает недостатками, ограничивающими его применение. К их числу можно отнести:
отсутствие численной оценки принимаемых решений;
недостаточную точность принимаемых решений из-за того, что отсутствует учет границ позиционных районов объектов радиомониторинга, находящихся в различных состояниях боевой деятельности;
отсутствие учета внешних границ групп объектов, находящихся в одном b-м состоянии боевой деятельности;
не определяют участки местности совместного размещения объектов радиомониторинга.
Целью заявляемого изобретения является разработка способа обработки результатов радиомониторинга, обеспечивающего принятие более точного решения в автоматизированном режиме об оперативной и электромагнитной обстановке в заданном районе, составе, состоянии и функционировании объектов с возможностью числовой оценки правильности принятых решений.
Поставленная цель достигается тем, что на подготовительном этапе формируют базу данных в составе первого массива с данными о физико-географических условиях заданного района, формируют компьютерные модели объектов и заносят их в базу данных в виде второго массива данных, содержащего физические параметры объекта  i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi, формируют третий массив данных с потенциальными сведениями об их пространственно-временных и количественных характеристиках, общей площади заданного района S, площади элементарного участка Si, удовлетворяющего требованиям по размещению i-го объекта или его элемента, удалению каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами Dij, формируют четвертый массив данных с параметрами радиоэлектронных средств (РЭС): Δƒ, V, Tu, modeλ, τсп, τти, где Δƒ - диапазон рабочих частот, V - вид передачи, Tu - тип радио или радиотехнического средства, u=1, 2, … U, modeλ - режим функционирования РЭС, λ=1, 2, …, Λ; τсп - среднее время работы РЭС при выходе в эфир, τти - интервал времени пребывания u-го РЭС на одной позиции, пятый массив данных с параметрами узлов связи (УС) пунктов управления (ПУ): количеством n РЭС различных типов Tип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, шестой массив данных с оперативно-тактическими нормативами по размещению УС на местности: удалением УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного
i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi, формируют третий массив данных с потенциальными сведениями об их пространственно-временных и количественных характеристиках, общей площади заданного района S, площади элементарного участка Si, удовлетворяющего требованиям по размещению i-го объекта или его элемента, удалению каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами Dij, формируют четвертый массив данных с параметрами радиоэлектронных средств (РЭС): Δƒ, V, Tu, modeλ, τсп, τти, где Δƒ - диапазон рабочих частот, V - вид передачи, Tu - тип радио или радиотехнического средства, u=1, 2, … U, modeλ - режим функционирования РЭС, λ=1, 2, …, Λ; τсп - среднее время работы РЭС при выходе в эфир, τти - интервал времени пребывания u-го РЭС на одной позиции, пятый массив данных с параметрами узлов связи (УС) пунктов управления (ПУ): количеством n РЭС различных типов Tип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, шестой массив данных с оперативно-тактическими нормативами по размещению УС на местности: удалением УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного  и различных
и различных  уровней управления, временем пребывания УС на одной позиции Tти, и седьмой массив данных с Н эталонными описаниями различных вариантов оперативной и соответствующих им электромагнитной обстановки (ЭМО), а в процессе работы дополнительно оценивают электромагнитную доступность (ЭМД) РЭС УС ПУ объектов РМ, сведения о которой записывают в восьмой массив данных, а с учетом всех восьми массивов базы данных оценивают текущую ЭМО, формируют девятый массив данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, (x,y)m, Vm, CSm, Tm, modem,
уровней управления, временем пребывания УС на одной позиции Tти, и седьмой массив данных с Н эталонными описаниями различных вариантов оперативной и соответствующих им электромагнитной обстановки (ЭМО), а в процессе работы дополнительно оценивают электромагнитную доступность (ЭМД) РЭС УС ПУ объектов РМ, сведения о которой записывают в восьмой массив данных, а с учетом всех восьми массивов базы данных оценивают текущую ЭМО, формируют девятый массив данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, (x,y)m, Vm, CSm, Tm, modem,  dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, (x,y)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Tm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,
dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, (x,y)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Tm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,  - время работы РЭС;
- время работы РЭС;  - время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточняют местоположение обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображают полученные результаты в геоинформационной системе (ГИС), по результатам оценки ЭМО определяют локальные объединения РЭС, образующие УС ПУ, уточняют их местоположение с учетом пригодности участков Sr, к их развертыванию, и локальные объединения анализируемых объектов, образованные совокупностью УС ПУ отдельных частей, соединений и объединений, а результаты анализа ЭМО записывают в десятый массив данных, сравнивают полученные результаты текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО, принимают решение о сложившейся оперативной обстановке и вероятном местоположении оцениваемых объектов и их состоянии, а результаты оперативной и электромагнитной обстановки записывают в одиннадцатый массив данных, на основе которых далее формируют двенадцатый массив данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, в противном случае при невыполнении пороговых условий продолжают оценку текущей электромагнитной обстановки, а информацию об объектах и их состоянии из десятого массива данных используют для формирования одиннадцатого массива данных, пятый массив данных дополняют эталонными пространственными описаниями границ локальных объединений РЭС, образующих УС ПУ различных звеньев управления, а шестой массив данных дополняют эталонными описаниями границ позиционных районов частей и соединений, колонн военной техники на марше и остановках, группировок войск во всех видах их боевого применения, описание каждого из Н вариантов эталонной ЭМО в заданном районе, h=1, 2, …, Н, хранящееся в седьмом массиве данных, реализуют совокупностью из KL эталонных описаний локальных объединений РЭС, где K - общее число локальностей k-го типа, k=1, 2, … K, L - общее число типов локальных объединений РЭС, l=1, 2, …, k, …, L, а анализ текущей оперативной и ЭМО в заданном районе, результат которого фиксируют в одиннадцатом массиве данных, начинают с исследования состояния локальных объединений РЭС, на основе данных, хранящихся с первого по десятый массивах, определяют наиболее вероятную принадлежность всех KL локальных объединений РЭС к объектам радиомониторинга по наибольшему значению вероятности Pk(b) и их наиболее вероятное текущее состояние b, b=1, 2, …, В, где В - количество возможных состояний локальных объединений, определяют внешние границы районов, в пределах которых объекты находятся в одном b-м состоянии, b=1, 2, … В, определяют участки местности совместного размещения объектов радиомониторинга, определяют значение вероятности Р(h) о наблюдении h-го текущего состояния электромагнитной и оперативной обстановки в заданном районе, уточняют оперативную обстановку на основе пространственного размещения объектов с общим b-м, b=1, 2, … В, состоянием, и совокупного размера занимаемых ими площадей, концентрации объектов на определенных участках местности, сравнивают полученное значение P(h) с пороговым уровнем Рпор, при выполнении пороговых условий P(h)≥Рпор сведения по электромагнитной и оперативной обстановке совместно с результатами их анализа записывают в одиннадцатый массив данных.
- время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточняют местоположение обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображают полученные результаты в геоинформационной системе (ГИС), по результатам оценки ЭМО определяют локальные объединения РЭС, образующие УС ПУ, уточняют их местоположение с учетом пригодности участков Sr, к их развертыванию, и локальные объединения анализируемых объектов, образованные совокупностью УС ПУ отдельных частей, соединений и объединений, а результаты анализа ЭМО записывают в десятый массив данных, сравнивают полученные результаты текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО, принимают решение о сложившейся оперативной обстановке и вероятном местоположении оцениваемых объектов и их состоянии, а результаты оперативной и электромагнитной обстановки записывают в одиннадцатый массив данных, на основе которых далее формируют двенадцатый массив данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, в противном случае при невыполнении пороговых условий продолжают оценку текущей электромагнитной обстановки, а информацию об объектах и их состоянии из десятого массива данных используют для формирования одиннадцатого массива данных, пятый массив данных дополняют эталонными пространственными описаниями границ локальных объединений РЭС, образующих УС ПУ различных звеньев управления, а шестой массив данных дополняют эталонными описаниями границ позиционных районов частей и соединений, колонн военной техники на марше и остановках, группировок войск во всех видах их боевого применения, описание каждого из Н вариантов эталонной ЭМО в заданном районе, h=1, 2, …, Н, хранящееся в седьмом массиве данных, реализуют совокупностью из KL эталонных описаний локальных объединений РЭС, где K - общее число локальностей k-го типа, k=1, 2, … K, L - общее число типов локальных объединений РЭС, l=1, 2, …, k, …, L, а анализ текущей оперативной и ЭМО в заданном районе, результат которого фиксируют в одиннадцатом массиве данных, начинают с исследования состояния локальных объединений РЭС, на основе данных, хранящихся с первого по десятый массивах, определяют наиболее вероятную принадлежность всех KL локальных объединений РЭС к объектам радиомониторинга по наибольшему значению вероятности Pk(b) и их наиболее вероятное текущее состояние b, b=1, 2, …, В, где В - количество возможных состояний локальных объединений, определяют внешние границы районов, в пределах которых объекты находятся в одном b-м состоянии, b=1, 2, … В, определяют участки местности совместного размещения объектов радиомониторинга, определяют значение вероятности Р(h) о наблюдении h-го текущего состояния электромагнитной и оперативной обстановки в заданном районе, уточняют оперативную обстановку на основе пространственного размещения объектов с общим b-м, b=1, 2, … В, состоянием, и совокупного размера занимаемых ими площадей, концентрации объектов на определенных участках местности, сравнивают полученное значение P(h) с пороговым уровнем Рпор, при выполнении пороговых условий P(h)≥Рпор сведения по электромагнитной и оперативной обстановке совместно с результатами их анализа записывают в одиннадцатый массив данных.
При этом вероятность принадлежности обнаруженного локального объединения РЭС к объекту k-го типа, находящемуся в b-м состоянии Pk (b) определяется из выражения

где r=1, 2, …, R, R - общее количество признаков, используемых для идентификации объекта k-го типа, находящегося в b-м состоянии.
Кроме того, значение вероятности Р(h) о наблюдении h-го текущего состояния электромагнитной и оперативной обстановки во всем заданном районе определяют из выражения
В свою очередь в случае наблюдения в заданном районе q пространственно разнесенных групп объектов радиомониторинга смешанного состава, находящихся в различных, но общих для каждой группы состояниях боевой деятельности b, b=1, 2, …, В, определяют вероятность Pq(h) по каждой из них, q=1, 2, …, а решение о текущей электромагнитной и оперативной обстановке принимают по совокупности значений вероятностей Pq(h).
Благодаря новой совокупности существенных признаков в заявленном способе за счет расширения базы данных априорной информацией о характеристиках объектов и РЭС, оперативно-тактических нормативах войск, адекватного описания различных оперативных ситуаций и соответствующих им вариантов ЭМО, использованию большего числа структурно-статистических признаков для обработки информации появляется возможность более точно выполнить анализ текущей электромагнитной и оперативной обстановки в автоматизированном режиме и численно оценить правильность принимаемых решений.
Заявляемые объекты поясняются чертежами, на которых показаны:
на фиг. 1 - обобщенный алгоритм обработки результатов радиомониторинга;
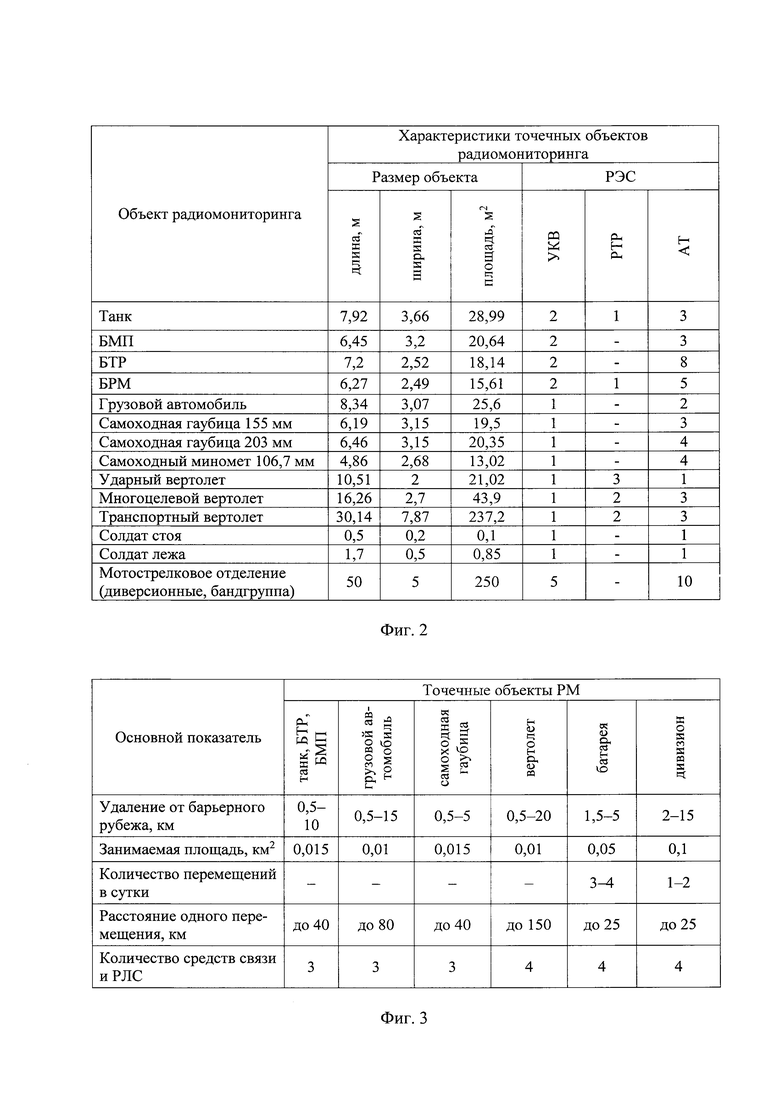
на фиг. 2 - размеры точечных объектов РМ;
на фиг. 3 - тактические характеристики точечных объектов РМ;
на фиг. 4 - характеристики средств радиосвязи;
на фиг. 5 - вариант формирования пятого массива данных;
на фиг. 6 - классификация групповых объектов РМ;
на фиг. 7 - вариант представления групповых объектов РМ;
на фиг. 8 - оперативно-тактические характеристики УС ПУ;
на фиг.9 а, б - характеристика групповых линейных объектов РМ;
на фиг. 10 - характеристика площадных групповых объектов РМ;
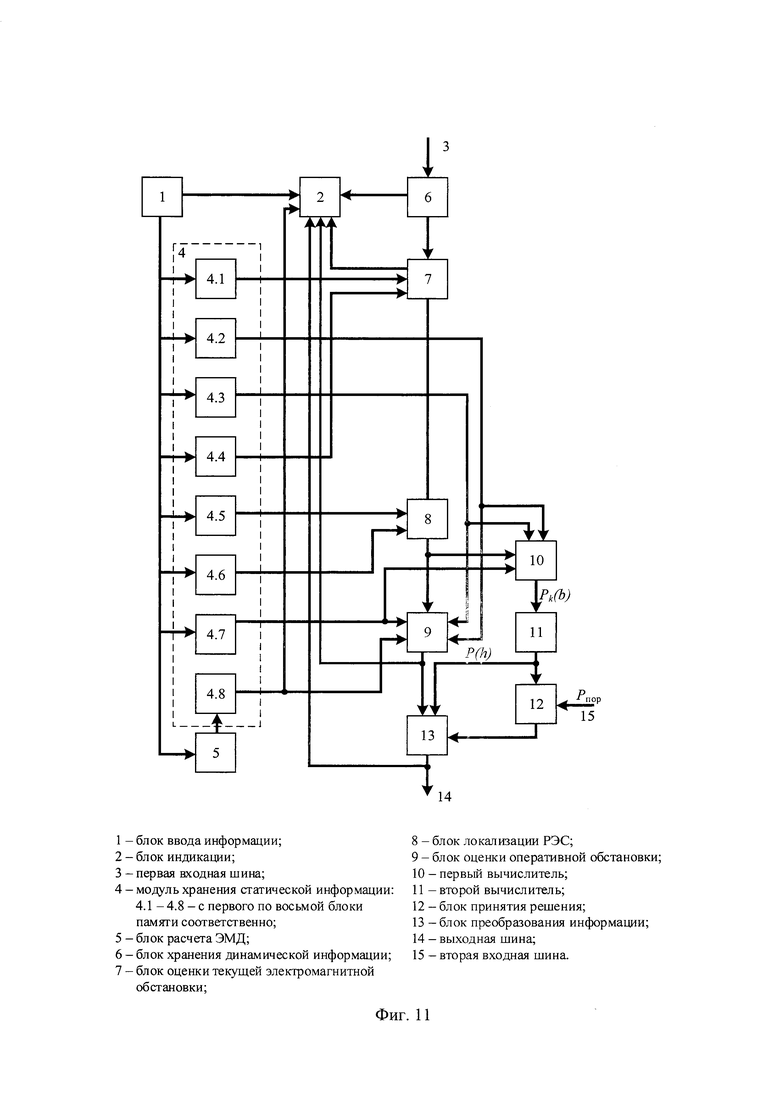
на фиг. 11 - обобщенная структурная схема устройства обработки результатов радиомониторинга.
Сущность изобретения состоит в следующем. Современные условия ведения РМ характеризуются перегруженностью частотного диапазона, снижением семантической доступности к излучениям контролируемых РЭС, уменьшением объема, полноты, достоверности данных, представляемых потребителю. В результате становятся наиболее информативными структурно-статистические признаки, а их обработка предполагает максимальное использование средств автоматизации. В этих условиях возникает необходимость численно оценить качество каждого принимаемого решения. Кроме того, расширение словаря признаков, используемых при анализе ЭМО и оперативной обстановки позволяет повысить качество обработки результата РМ.
В предлагаемом способе для решения поставленной задачи на подготовительном этапе выполняют следующие операции (см. фиг. 1). Формируют первый массив базы данных о физико-географических условиях заданного района на основе ГИС. Выделенные оператором данные из первого массива отображают в виде трехмерного изображения для последующего анализа.
Заданный район по аналогии с прототипом делят на элементарные участки Ak, k=1, 2, …, K и осуществляют оценку их тактических свойств по инженерным и оперативно-тактическим требованиям по возможности размещения объектов на местности. В результате определяют участки, удовлетворяющие поставленным требованиям, а участки, имеющие общие точки соприкосновения, объединяют в единые районы. Элементарные участки, неудовлетворяющие поставленным требованиям, исключают из дальнейшей обработки.
Формируют компьютерные модели объектов военной техники (точечных объектов РМ) и заносят их в базу данных в виде второго массива данных. Последние содержат физические параметры объектов  i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi (см. фиг. 2).
i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi (см. фиг. 2).
Далее формируют третий массив данных с потенциальными данными об их пространственно-временных и количественных характеристиках.
Кроме того, в третий массив данных заносят сведения об общей площади заданного района S, результаты предварительного анализа на пригодность элементарных участков с площадью Si для развертывания различных объектов или их элементов (из первого массива), удаление каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами Dij (см. фиг. 3).
По выбору оператора отображают необходимые данные об объектах в виде табличного и/или графического представления.
Формируют четвертый массив данных с параметрами РЭС (см. фиг. 4): диапазоном рабочих частот Δƒ, видом передачи V, типом радио или радиотехнического средства Tu, u=1, 2, …, U, режимом функционирования РЭС modeλ, λ=1, 2, …, Λ, средним временем работы РЭС при выходе в эфир τсп, интервалом времени пребывания u-го РЭС на одной позиции τти. При необходимости этот массив может быть расширен другими техническими параметрами РЭС.
После этого приступают к формированию пятого массива данных с параметрами узлов связи пунктов управления различного уровня (см. фиг. 5), количеством n РЭС различных типов Тип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, эталонными пространственными описаниями границ локальных объединений РЭС, образующих УС ПУ различных звеньев управления.
Варианты эталонного описания границ локальных объединений РЭС представлены на фиг. 6 и 7. Групповые объекты включают в себя определенное количество точечных объектов, распределенных на местности и объединенных между собой сложными функциональными связями, определяемыми боевым предназначением как точечных объектов, так и группового объекта в целом.
Шестой массив базы данных предназначен для хранения информации об оперативно-тактических нормативах и пространственно-временных характеристиках по размещению УС ПУ на местности (см. фиг. 9а, б): удалении УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного  и различных
и различных  уровней управления, времени пребывания УС на одной позиции Tти.
уровней управления, времени пребывания УС на одной позиции Tти.
Дополнительно в шестом массиве данных формируют эталонные описания границ позиционных районов частей и соединений (см. фиг. 6), колонн военной техники на марше и остановках (см. фиг. 9а, б), группировок войск во всех видах боевого применения (фиг. 10).
Подготовительный этап завершается формированием массива данных с эталонными описаниями различных вариантов оперативной обстановки (наступление в центре или на одном из флангов заданного района, оборона и т.д.). При этом учитывают как стандартный набор сил и средств, так и соответствующий заданному району. Далее определяют соответствующий набор радиосредств для этой группировки объектов, порядок организации радиосвязи между ее элементами с учетом технических характеристик РЭС. Описание каждого из Н вариантов эталонной ЭМО в заданном районе, h=1, 2, …, Н, хранящееся в седьмом массиве данных, реализуют совокупностью из KL эталонных описаний локальных объединений РЭС, где K - общее число локальностей k-го типа k=1, 2, …, K, L - общее число типов локальных объединений РЭС, l=1, 2, …, L.
В результате получают эталонные описания ЭМО для всех вариантов развития оперативной обстановки. От качества описания эталонных моделей оперативной и ЭМО в дальнейшем зависит и адекватность принимаемых решений.
На следующем этапе после задания по возможности всеобъемлющей априорной информации об объектах приступают к режиму анализа оперативной и ЭМО, осуществляют оценку электромагнитной доступности (ЭМД) к РЭС, находящихся в заданном районе. Последняя косвенно характеризует не только достижимое качество оценки ЭМО, но и оптимальность пространственного размещения измерителей. Поэтому на этом этапе возможна коррекция местоположения некоторых измерителей с целью улучшения ЭМД объектов РМ. Результаты оценки ЭМД записывают в восьмой массив данных и по требованию оператора представляют на экране монитора на фоне цифровой карты ГИС.
В процессе работы оценка текущей ЭМО заключается в обработке входного информационного потока Iвх, который представляет собой набор параметров радиоизлучений от различных средств РМ. При этом вектор параметров Iвх от m-го РЭС имеет вид:

где ƒm - рабочая частота m-го РЭС, (х,у)m - координаты m-го РЭС, Vm - вид передачи m-го РЭС, CSm - его позывной, Tm - тип РЭС, modem - режим функционирования m-го РЭС,  - время пребывания m-го РЭС на одной позиции,
- время пребывания m-го РЭС на одной позиции,  - среднее время работы m-го РЭС при выходе в эфир, dlj - взаимное удаление l-го и j-го РЭС, функционирующих в одной радиосети. Последний может быть расширен в зависимости от сложившейся ЭМО и возможностей измерителей. Следует отметить, что в выполняемом анализе не подлежат рассмотрению объекты и их РЭС, находящиеся в воздухе. Так же исключены из рассмотрения параметры сигналов радиотехнических средств. Учет последних при анализе ЭМО и оперативной обстановки позволит расширить вектор параметров (1) и, следовательно, повысить достоверность полученных оценок.
- среднее время работы m-го РЭС при выходе в эфир, dlj - взаимное удаление l-го и j-го РЭС, функционирующих в одной радиосети. Последний может быть расширен в зависимости от сложившейся ЭМО и возможностей измерителей. Следует отметить, что в выполняемом анализе не подлежат рассмотрению объекты и их РЭС, находящиеся в воздухе. Так же исключены из рассмотрения параметры сигналов радиотехнических средств. Учет последних при анализе ЭМО и оперативной обстановки позволит расширить вектор параметров (1) и, следовательно, повысить достоверность полученных оценок.
Вероятность одновременного заполнения всех элементов вектора параметров обнаруженного РЭС незначительна. Некоторые его элементы могут так и остаться нулевыми.
По окончании инициализации данных местоположения РЭС на фоне электронной карты ГИС и обработки параметров радиосигналов полученные результаты заносят в девятый массив базы данных и отображают на электронной карте ГИС. На основе полученных в массиве 9 данных о текущей ЭМО и априорных данных об объектах (массивы 2-7), ЭМД к РЭС (массив 8) приступают к анализу оперативной обстановки в заданном районе. Для этого определяют взаимные удаления РЭС. Это целесообразно выполнить с использованием выражения для обобщенного евклидова расстояния

В результате получают n-мерную матрицу попарных расстояний между РЭС.
Известно, что плотность размещения РЭС на местности отражает плотность объектов как по фронту, так и по глубине заданного района. С целью определения этого показателя РЭС локализуют (объединяют) в группы (локальности). Локализация РЭС на местности на интервале времени отражает динамику поведения объектов. Временные интервалы, через которые необходимо проводить группирование РЭС, определяют из тактических нормативов смены позиционных районов и темпов реализуемого оперативного замысла. Поставленную задачу целесообразно реализовать с помощью агломеративно-иерархических алгоритмов. Результатом локализации является распределение РЭС по уровням иерархии, которое представляется в виде таксономического дерева-дендрограммы. Порядок локализации РЭС приведен в способе-прототипе.
Далее определяют число локальностей РЭС KL в заданном районе, где K - общее число k-го типа, L - общее число типов локальных объединений РЭС, l=1, 2, …, L.
На основании данных, хранящихся с первого по девятый массивы, определяют наиболее вероятную (максимальную вероятность) принадлежность каждого обнаруженного локального объединения РЭС maxPk(b) к объекту k-го типа, находящемуся в b-м состоянии

где r=1, 2, …, R, R - общее количество признаков, используемых для идентификации объекта k-го типа, находящегося в b-м состоянии, Gr(b) - вероятность отнесения обнаруженного локального объединения РЭС к k-му типу объектов, находящемуся в b-м состоянии, при использовании для анализа r-го признака.

 - эталонное значение r-го признака,
- эталонное значение r-го признака,  gr - измеренное значение признака.
gr - измеренное значение признака.
При распознавании ЛО РЭС используют наиболее информативные (контрастные) признаки, характеризующие данный тип объектов РМ. К их числу, например, для УС ПУ, могут быть отнесены: количество и типы РЭС, форма границ и площадь, занимаемая ЛО РЭС, удаление ЛО от линии разграничения и др. Использование малоинформативных признаков в (2) приводит к снижению значения Pk(b) и как следствие - к ошибкам распознавания.
Далее определяют внешние границы районов, в пределах которых объекты РМ находятся в одном b-м состоянии, b=1, 2, …, В, измеряют их площадь SΣ(b). Акцентируют внимание на участки местности совместного размещения объектов РМ (районах их сосредоточения).
В случае, если в результате анализа сделали вывод о том, что все KL-объекты РМ находятся в одном b-м состоянии, вероятность Р(h) наблюдения h-го текущего состояния ЭМО и ОО в заданном районе определяют из выражения

В результате принимают решение о нахождении объектов РМ в контролируемом районе в состоянии h (например, готовности к наступательным действиям) с вероятностью P(h). Из-за того, что практически невозможно предусмотреть все возможные сценарии развития событий в эталонах ОО, складывающуюся обстановку уточняют на основе полученных результатов РМ. Сравнение пространственного размещения объектов РМ с общим b-м, b=1, 2, …, В, состоянием, анализ совокупного размера занимаемых ими площадей, концентрации объектов на определенных участках местности позволяет принять окончательное (уточненное) решение о наиболее вероятной ЭМО и ОО в заданном районе.
Сравнивают полученное значение P(h) с пороговым уровнем Рпор, которое определяет надежность принимаемых решений и задается на подготовительном этапе.
При выполнении пороговых условий P(h)≥Рпор сведения по ЭМО и ОО записывают в одиннадцатый массив данных.
В случае наблюдения в заданном районе q пространственно разнесенных групп объектов РМ смешанного состава, находящихся в различных, но общих для каждой группы состояниях боевой деятельности b, b=1, 2, …, В, определяют в соответствии с (4) вероятность Pq(h) по каждой из них, q=1, 2, …, Q. Решение о текущей ЭМО и ОО принимают по совокупности значений вероятностей Pq(h) с учетом состава состояния и пространственного размещения групп объектов РМ. При этом все Pq(h) сравнивают с пороговым уровнем Рпор.
В случае невыполнения пороговых условий продолжают анализ текущей ЭМО, а на ее основе - оперативной обстановки.
Предлагаемый способ обработки результатов радиомониторинга может быть реализован с помощью устройства, приведенного на фиг. 11. Устройство содержит блок ввода информации 1, блок индикации 2, первую входную шину устройства 3, модуль хранения статической информации 4 в составе восьми блоков памяти 4.1 - 4.8, блок расчета электромагнитной доступности 5, блок хранения динамической информации 6, блок оценки текущей электромагнитной обстановки 7, блок локализации радиоэлектронных средств 8, блок оценки оперативной обстановки 9, первый вычислитель 10, второй вычислитель 11, блок принятия решения 12, блок преобразования информации 13, выходную шину устройства 14, вторую входную шину 15.
На подготовительном этапе с помощью блока ввода информации 1 вводится вся априорная информация в модуль хранения статической информации 4. Последняя размещается по соответствующим блокам памяти 4.1 - 4.7 (массивы 1-7 соответственно). По второй входной шине 15 задают значение Рпор.
Все вводимые данные при необходимости по команде блока 1 отражают на экране блока индикации 2.
На начальном этапе работы с помощью блока расчета ЭМД 5 определяют границы доступности излучений РЭС различных диапазонов частот до всех измерителей. Данные о последних (координаты местоположения, особенности их географического расположения, рабочий диапазон частот и др.) поступают на группу информационных входов блока 5 с группы информационных выходов блока 1.
На данном этапе имеется возможность оптимизировать (уточнить) местоположение измерителей относительно заданного района РМ. Результаты оценки ЭМД записывают в блок памяти 4.8 модуля хранения статической информации 4.
В процессе работы входной информационный поток  о ЭМО по первой входной шине 3 поступает на группу информационных входов блока хранения динамической информации 6. Блок 6 представляет собой буферное запоминающее устройство. Информация о очередном m-м излучении в виде вектора параметров (ƒm, (х,у)m, Vm, CSm, Tm, modem,
о ЭМО по первой входной шине 3 поступает на группу информационных входов блока хранения динамической информации 6. Блок 6 представляет собой буферное запоминающее устройство. Информация о очередном m-м излучении в виде вектора параметров (ƒm, (х,у)m, Vm, CSm, Tm, modem,  dlj) с группы информационных выходов блока 6 поступает на первую группу информационных входов блока оценки текущей ЭМО 7. На вторую группу его информационных входов поступают сведения о параметрах РЭС с группы информационных выходов блока памяти 4.4. На третью группу информационных входов поступают цифровые модели местности с группы информационных выходов блока 4.1.
dlj) с группы информационных выходов блока 6 поступает на первую группу информационных входов блока оценки текущей ЭМО 7. На вторую группу его информационных входов поступают сведения о параметрах РЭС с группы информационных выходов блока памяти 4.4. На третью группу информационных входов поступают цифровые модели местности с группы информационных выходов блока 4.1.
В блоке 7 осуществляют анализ поступивших данных: определение типа m-го РЭС, уточнение его местоположения на местности, расчет дистанции связи dij РЭС, работающих в одной радиосети, формирование предварительных выводов о принадлежности РЭС к УС ПУ. По команде блока 1 результаты анализа блока 7 высвечиваются на экране блока 2 на фоне цифровой карты ГИС.
Полученная в блоке 7 информация с группы информационных выходов поступает на первую группу информационных входов блока локализации РЭС 8. На вторую группу его информационных входов поступает априорная информация о характеристиках объектов РМ (УС ПУ) с группы информационных выходов блока памяти 4.5. На третью группу информационных входов блока 8 поступают оперативно-тактические нормативы по размещению объектов РМ на местности с группы информационных выходов блока 4.6. В функции блока 8 входит локализация (объединение) РЭС в группы (локальности).
Результаты анализа (сформированные локальности РЭС) совместно с цифровой картой ГИС с группы информационных выходов блока 8 поступают на первые группы информационных входов блока оценки оперативной обстановки 9 и первого вычислителя 10. На вторые группы их информационных входов поступают значения эталонных описаний оперативной и электромагнитной обстановки для типовых оперативных ситуаций с группы информационных выходов блока 4.7. На третью группу информационных входов блока 9 поступает информация о ЭМД РЭС с группы информационных выходов блока 4.8. На четвертую группу информационных входов блока 9 и третью группу информационных входов блока 10 поступают модели объектов с группы информационных выходов блока 4.2. На пятую группу информационных входов блока 9 и четвертую группу информационных входов вычислителя 10 подают пространственно-временные характеристики объектов с группы информационных выходов блока 4.3.
В функции блока 9 входит сравнительный анализ эталонных описаний оперативной и ЭМО с реальной динамично изменяющейся оперативной и РЭО с учетом ЭМО излучений РЭС и выбор наиболее близкого эталонного описания.
В функции первого вычислителя 10 входит расчет максимальной вероятности принадлежности обнаруженного локального объединения РЭС к объекту РМ k-го типа, находящегося в b-ом состоянии Pk(b). Эту операцию блок 10 выполняет в соответствии с выражениями (2) и (3). На выходе блока 10 формируется максимальное значение max Pk(b), которое поступает на первую группу информационных входов второго вычислителя 11. Второй вычислитель 11 предназначен для определения вероятности P(h) или q значений Pq(h) текущего состояния ЭМО и ОО в заданном районе в соответствии с (4).
Найденное значение P(h) или q значений Pq(h) поступают на информационный вход блока принятия решения 12. Здесь реализуют операцию сравнения полученного значения P(h) или Pq(h) с пороговым уровнем Рпор. При выполнении пороговых условий P(h)≥Рпор, на выходе блока 12 формируется управляющий сигнал (поступающий на управляющий вход блока 13), разрешающий запись информации блоков 9 и 11 в блок преобразования информации 13.
Выбранное наиболее близкое эталонное описание оперативной и ЭМО совместно с их текущим значением с группы информационных выходов блока 9 поступают на первую группу информационных входов блока 13. На вторую группу его информационных входов с выхода блока 11 поступает значение P(h).
Блок 13 предназначен для преобразования полученной информации к виду, заданному потребителем информации. К заказчику она поступает по выходной шине 14. В противном случае, когда не выполняются пороговые условия в блоке 11, информация на его выходе отсутствует, а устройство продолжает выполнять анализ электромагнитной и оперативной обстановки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки результатов радиомониторинга | 2017 |
|
RU2659486C1 |
| Способ обработки результатов радиомониторинга | 2020 |
|
RU2740708C1 |
| Способ обработки результатов радиомониторинга | 2021 |
|
RU2781947C1 |
| Способ профессиональной подготовки должностных лиц органов управления радиомониторингом | 2021 |
|
RU2776323C1 |
| Способ профессиональной подготовки должностных лиц органов управления радиоэлектронной борьбы | 2022 |
|
RU2794470C1 |
| Способ системно-динамического представления радиоэлектронной обстановки для профессиональной подготовки специалистов радиомониторинга | 2016 |
|
RU2627255C1 |
| Способ определения координат объектов и их распознавания | 2022 |
|
RU2787946C1 |
| Контрольно-измерительная система радиомониторинга | 2022 |
|
RU2790349C1 |
| СПОСОБ УПРАВЛЕНИЯ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ КОНТРОЛЯ ОКРУЖАЮЩЕГО ПРОСТРАНСТВА | 2019 |
|
RU2718234C1 |
| Способ прокладывания маршрута движения подвижных объектов по пересеченной местности | 2018 |
|
RU2681667C1 |







Изобретение относится к области автоматизации информационно-управляющих систем управления и контроля за состоянием удаленных объектов. Технический результат заключается в принятии более точного решения в автоматизированном режиме об оперативной и электромагнитной обстановке в заданном районе, составе, состоянии и функционировании объектов с возможностью числовой оценки правильности принятых решений. Такой результат достигается за счет того, что формируют базу данных со сведениями о физико-географических условиях заданного района, данными с параметрами радиоэлектронных средств (РЭС), узлов связи (УС) пунктов управления (ПУ), локальными объединениями (ЛО) РЭС, данными с оперативно-тактическими нормативами по размещению УС ПУ на местности, эталонными данными границ позиционных районов объектов РМ, эталонными данными описания различных вариантов оперативной и электромагнитной обстановки, электромагнитную доступность (ЭМД) РЭС УС ПУ объектов РМ, оценивают текущую ЭМО, выделяют локальные объединения РЭС, уточняют их местоположение и границы занимаемых районов, определяют вероятность их принадлежности к k-м объектам радиомониторинга Рk(b), k=1, 2, …, K и их текущее состояние b, b - 1, 2, …, В, определяют внешние границы групп объектов РМ, находящихся в одном b-м состоянии боевой деятельности, выделяют участки местности совместного размещения объектов РМ, определяют вероятность P(h) наблюдения в заданном районе h-го текущего состояния ЭМО и оперативной обстановки (ОО), сравнивают значение P(h) с заданным пороговым уровнем Рпор. 3 з.п. ф-лы, 11 ил.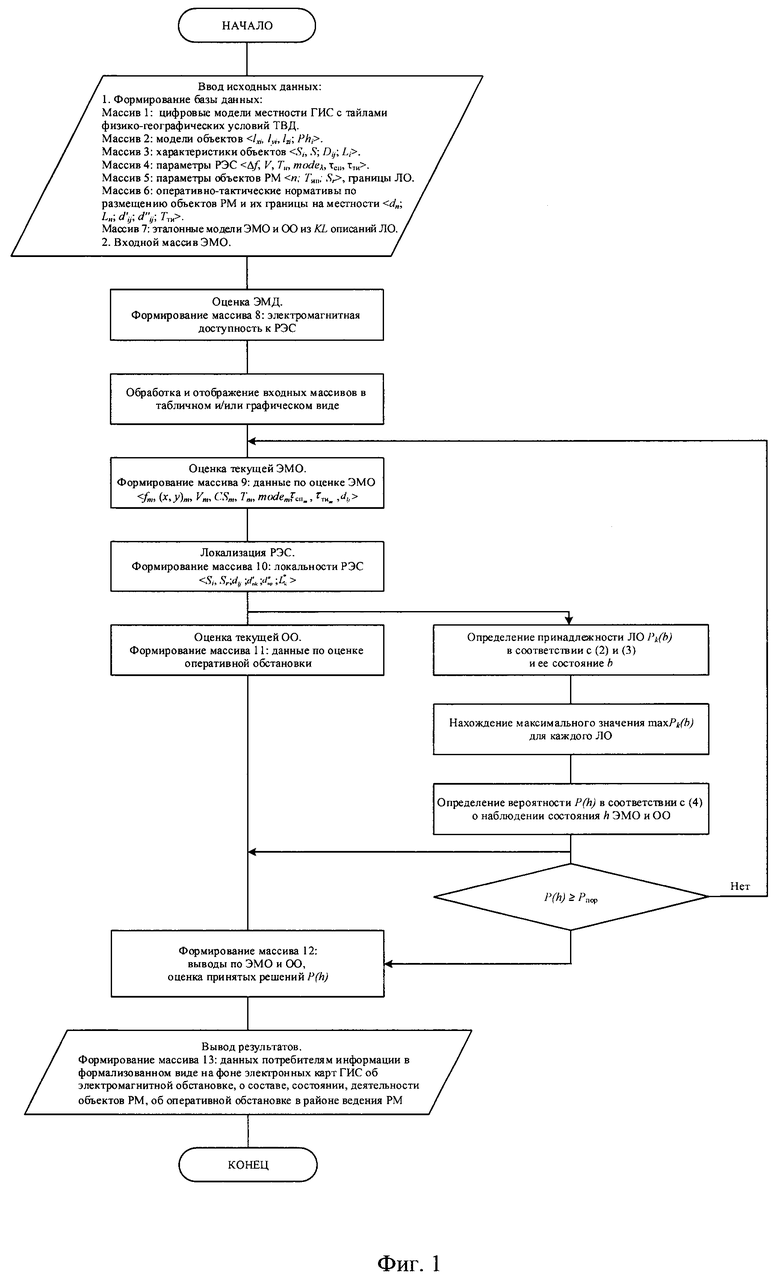
1. Способ обработки результатов радиомониторинга (РМ), заключающийся в том, что на подготовительном этапе формируют базу данных в составе первого массива с данными о физико-географических условиях заданного района, формируют компьютерные модели объектов и заносят их в базу данных в виде второго массива данных, содержащего физические параметры объекта  i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi, формируют третий массив данных с потенциальными сведениями об их пространственно-временных и количественных характеристиках, общей площади заданного района S, площади элементарного участка Si, удовлетворяющего требованиям по размещению i-го объекта или его элемента, удалению каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами Dij, формируют четвертый массив данных с параметрами радиоэлектронных средств (РЭС): Δƒ, V, Tu, modeλ, τсп, τти, где Δƒ - диапазон рабочих частот, V - вид передачи, Tu - тип радио или радиотехнического средства, u=1, 2, … U, modeλ - режим функционирования РЭС, λ=1, 2, …, Λ; τсп - среднее время работы РЭС при выходе в эфир, τти - интервал времени пребывания u-го РЭС на одной позиции, пятый массив данных с параметрами узлов связи (УС) пунктов управления (ПУ): количеством n РЭС различных типов Tип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, шестой массив данных с оперативно-тактическими нормативами по размещению УС на местности: удалением УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного
i-го типа, i=1, 2, …, I, фото или радиолокационный снимок Phi, формируют третий массив данных с потенциальными сведениями об их пространственно-временных и количественных характеристиках, общей площади заданного района S, площади элементарного участка Si, удовлетворяющего требованиям по размещению i-го объекта или его элемента, удалению каждого i-го объекта от барьерного рубежа Li для различных оперативных условий, взаимном расстоянии между i-м и j-м объектами Dij, формируют четвертый массив данных с параметрами радиоэлектронных средств (РЭС): Δƒ, V, Tu, modeλ, τсп, τти, где Δƒ - диапазон рабочих частот, V - вид передачи, Tu - тип радио или радиотехнического средства, u=1, 2, … U, modeλ - режим функционирования РЭС, λ=1, 2, …, Λ; τсп - среднее время работы РЭС при выходе в эфир, τти - интервал времени пребывания u-го РЭС на одной позиции, пятый массив данных с параметрами узлов связи (УС) пунктов управления (ПУ): количеством n РЭС различных типов Tип, n=1, 2, …, N, размерами необходимой площади для их развертывания Sr, Sr=n⋅Si, шестой массив данных с оперативно-тактическими нормативами по размещению УС на местности: удалением УС от соответствующих ПУ dn и барьерного рубежа Ln, взаимным удалением УС ПУ одного  и различных
и различных  уровней управления, временем пребывания УС на одной позиции Тти, и седьмой массив данных с Н эталонными описаниями различных вариантов оперативной и соответствующих им электромагнитной обстановки (ЭМО), а в процессе работы дополнительно оценивают электромагнитную доступность (ЭМД) РЭС УС ПУ объектов РМ, сведения о которой записывают в восьмой массив данных, а с учетом всех восьми массивов базы данных оценивают текущую ЭМО, формируют девятый массив данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, (x,y)m, Vm, CSm, Tm, modem,
уровней управления, временем пребывания УС на одной позиции Тти, и седьмой массив данных с Н эталонными описаниями различных вариантов оперативной и соответствующих им электромагнитной обстановки (ЭМО), а в процессе работы дополнительно оценивают электромагнитную доступность (ЭМД) РЭС УС ПУ объектов РМ, сведения о которой записывают в восьмой массив данных, а с учетом всех восьми массивов базы данных оценивают текущую ЭМО, формируют девятый массив данных с результатами оценки ЭМО в заданном районе с учетом ЭМД РЭС узлов связи ПУ: ƒm, (x,y)m, Vm, CSm, Tm, modem,  dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, (х,у)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Tm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,
dlj, где ƒm - рабочая частота обнаруженного излучения РЭС, (х,у)m - координаты РЭС, работающего на m-й частоте, Vm - вид принятого на ней сигнала, CSm - позывной работающего РЭС, Tm - идентификационный тип РЭС, modem - режим функционирования РЭС на m-й частоте,  - время работы РЭС;
- время работы РЭС;  - время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточняют местоположение обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображают полученные результаты в геоинформационной системе (ГИС), по результатам оценки ЭМО определяют локальные объединения РЭС, образующие УС ПУ, уточняют их местоположение с учетом пригодности участков Sr, к их развертыванию и локальные объединения анализируемых объектов, образованные совокупностью УС ПУ отдельных частей, соединений и объединений, а результаты анализа ЭМО записывают в десятый массив данных, сравнивают полученные результаты текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО, принимают решение о сложившейся оперативной обстановке и вероятном местоположении оцениваемых объектов и их состоянии, а результаты оперативной и электромагнитной обстановки записывают в одиннадцатый массив данных, на основе которых далее формируют двенадцатый массив данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, в противном случае при невыполнении пороговых условий продолжают оценку текущей электромагнитной обстановки, а информацию об объектах и их состоянии из десятого массива данных используют для формирования одиннадцатого массива данных, отличающийся тем, что пятый массив данных дополняют эталонными пространственными описаниями границ локальных объединений РЭС, образующих УС ПУ различных звеньев управления, а шестой массив данных дополняют эталонными описаниями границ позиционных районов частей и соединений, колонн военной техники на марше и остановках, группировок войск во всех видах их боевого применения, описание каждого из H вариантов эталонной ЭМО в заданном районе, h=1, 2, …, Н, хранящееся в седьмом массиве данных, реализуют совокупностью из KL эталонных описаний локальных объединений РЭС, где K - общее число локальностей k-го типа, k=1, 2, … K, Z - общее число типов локальных объединений РЭС, l=1, 2, …, k, …, L, а анализ текущей оперативной и ЭМО в заданном районе, результат которого фиксируют в одиннадцатом массиве данных, начинают с исследования состояния локальных объединений РЭС, на основе данных, хранящихся с первого по десятый массивах, определяют наиболее вероятную принадлежность всех KL локальных объединений РЭС к объектам радиомониторинга по наибольшему значению вероятности Pk(b) и их наиболее вероятное текущее состояние b, b=1, 2, …, В, В - количество возможных состояний локальных объединений, определяют внешние границы районов, в пределах которых объекты находятся в одном b-м состоянии, b=1, 2, … В, определяют участки местности совместного размещения объектов радиомониторинга, определяют значение вероятности Р(h) о наблюдении h-го текущего состояния электромагнитной и оперативной обстановки в заданном районе, уточняют оперативную обстановку на основе пространственного размещения объектов с общим b-м, b=1, 2, … В, состоянием, и совокупного размера занимаемых ими площадей, концентрации объектов на определенных участках местности, сравнивают полученное значение P(h) с пороговым уровнем Рпор, при выполнении пороговых условий P(h)≥Рпор сведения по электромагнитной и оперативной обстановке совместно с результатами их анализа записывают в одиннадцатый массив данных.
- время пребывания РЭС на одной позиции, dlj - взаимное удаление l-го и j-го РЭС, работающих в одной радиосети, уточняют местоположение обнаруженных РЭС с учетом пригодности элементарных участков Si к их развертыванию, отображают полученные результаты в геоинформационной системе (ГИС), по результатам оценки ЭМО определяют локальные объединения РЭС, образующие УС ПУ, уточняют их местоположение с учетом пригодности участков Sr, к их развертыванию и локальные объединения анализируемых объектов, образованные совокупностью УС ПУ отдельных частей, соединений и объединений, а результаты анализа ЭМО записывают в десятый массив данных, сравнивают полученные результаты текущей ЭМО с ее эталонными моделями, хранящимися в седьмом массиве данных, при совпадении с заданной точностью текущей оценки ЭМО с описанием одной из эталонных моделей ЭМО, принимают решение о сложившейся оперативной обстановке и вероятном местоположении оцениваемых объектов и их состоянии, а результаты оперативной и электромагнитной обстановки записывают в одиннадцатый массив данных, на основе которых далее формируют двенадцатый массив данных с формализованными данными об оперативной и электромагнитной обстановке в заданном районе для потребителей информации, которую представляют на электронной карте ГИС, в противном случае при невыполнении пороговых условий продолжают оценку текущей электромагнитной обстановки, а информацию об объектах и их состоянии из десятого массива данных используют для формирования одиннадцатого массива данных, отличающийся тем, что пятый массив данных дополняют эталонными пространственными описаниями границ локальных объединений РЭС, образующих УС ПУ различных звеньев управления, а шестой массив данных дополняют эталонными описаниями границ позиционных районов частей и соединений, колонн военной техники на марше и остановках, группировок войск во всех видах их боевого применения, описание каждого из H вариантов эталонной ЭМО в заданном районе, h=1, 2, …, Н, хранящееся в седьмом массиве данных, реализуют совокупностью из KL эталонных описаний локальных объединений РЭС, где K - общее число локальностей k-го типа, k=1, 2, … K, Z - общее число типов локальных объединений РЭС, l=1, 2, …, k, …, L, а анализ текущей оперативной и ЭМО в заданном районе, результат которого фиксируют в одиннадцатом массиве данных, начинают с исследования состояния локальных объединений РЭС, на основе данных, хранящихся с первого по десятый массивах, определяют наиболее вероятную принадлежность всех KL локальных объединений РЭС к объектам радиомониторинга по наибольшему значению вероятности Pk(b) и их наиболее вероятное текущее состояние b, b=1, 2, …, В, В - количество возможных состояний локальных объединений, определяют внешние границы районов, в пределах которых объекты находятся в одном b-м состоянии, b=1, 2, … В, определяют участки местности совместного размещения объектов радиомониторинга, определяют значение вероятности Р(h) о наблюдении h-го текущего состояния электромагнитной и оперативной обстановки в заданном районе, уточняют оперативную обстановку на основе пространственного размещения объектов с общим b-м, b=1, 2, … В, состоянием, и совокупного размера занимаемых ими площадей, концентрации объектов на определенных участках местности, сравнивают полученное значение P(h) с пороговым уровнем Рпор, при выполнении пороговых условий P(h)≥Рпор сведения по электромагнитной и оперативной обстановке совместно с результатами их анализа записывают в одиннадцатый массив данных.
2. Способ по п. 1, отличающийся тем, что вероятность принадлежности обнаруженного локального объединения РЭС к объекту k-го типа, находящемуся в b-м состоянии Pk(b), определяется из выражения
где r=1, 2, …, R, R - общее количество признаков, используемых для идентификации объекта k-го типа, находящегося в b-м состоянии.
3. Способ по п. 1, отличающийся тем, что значение вероятности P(h) о наблюдении h-го текущего состояния электромагнитной и оперативной обстановки во всем заданном районе определяют из выражения
4. Способ по п. 1, отличающийся тем, что в случае наблюдения в заданном районе q пространственно разнесенных групп объектов радиомониторинга смешанного состава, находящихся в различных, но общих для каждой группы состояниях боевой деятельности b, b - 1, 2, …, В, определяют вероятность Pq(h) по каждой из них, q=1, 2, …, а решение о текущей электромагнитной и оперативной обстановке принимают по совокупности значений вероятностей Pq(h).
| Способ обработки результатов радиомониторинга | 2017 |
|
RU2659486C1 |
| СПОСОБ ОЦЕНКИ ЭФФЕКТИВНОСТИ ПРОЦЕССА РАЗРАБОТКИ ОБЪЕКТОВ ВОЕННОЙ ТЕХНИКИ | 2004 |
|
RU2282243C2 |
| US 8229163 B2, 24.07.2012 | |||
| US 9319471 B2, 19.04.2016 | |||
| US 8135413 B2, 13.03.2012. | |||

