Изобретение относится к радиотехнике и предназначено для осуществления в режиме реального времени проверок технического состояния берегового и плавучего навигационного и телекоммуникационного оборудования базовых станций автоматической идентификационной системы (АИС) внутренних водных путей (ВВП) Российской Федерации (РФ), а также портов и прибрежных морских районов, в том числе районов с интенсивным судоходством.
Известен способ мониторинга технического состояния наземных средств радиотехнического обеспечения полетов, описанный в Федеральных авиационных правилах «Летные проверки наземных средств радиотехнического обеспечения полетов, авиационной электросвязи и систем светосигнального оборудования аэродромов гражданской авиации», утвержденных Приказом Министерства транспорта Российской Федерации от 18.01.2005 № 1, г. Москва (см. Российская газета. – № 3733. – 2005. – 31 марта). Для целей летных проверок наземных средств радиотехнического оборудования (РТО) полетов используют специальное воздушное судно-лабораторию (ВСЛ), на котором установлены измерительные приемники и УКВ связная радиостанция, в диапазоне которой работают автоматические радиопеленгаторы (АРП). Для проверки радиомаячных систем (PMC) посадочной радиомаячной группы (ПРМГ) осуществляются наземные угломерные измерения координат траектории полета воздушного судна с высокой точностью с помощью оптических приборов, а для проверки азимутальных и дальномерных радиомаяков систем ближней навигации и автоматических радиопеленгаторов (PMA/VOR, РМД/DME, РСБН, АРП) используется метод опорных точек, включающий в себя определение координат ВСЛ в моменты пролета над заданными точками с известными географическими координатами на земной поверхности (наземными ориентирами). При этом одновременно при работе радиотехнических средств формируют установленными на борту ВСЛ бортовыми приемниками радионавигационные измерительные сигналы, обрабатывают совместно сигналы с выхода оптического устройства и измерительные сигналы, отображают и регистрируют результаты измерений и результаты совместной обработки сигналов.
Недостатком известного способа является необходимость применения специализированного летательного аппарата, что вызывает большие затраты и соответственно высокую стоимость этих работ, не позволяет оперативно контролировать выходные характеристики РМС, радионавигационных систем и АРП в период между плановыми проверками, делает недоступным его применение при проведении научно-исследовательских работ и в учебном процессе.
Известен способ оценки характеристик зенитно-ракетных систем (ЗРС) (см. статью авт. Раева А.А. и др. «Использование беспилотных летательных аппаратов при оценке характеристик ЗРС» // Вестник воздушно-космической обороны. 2017. № 2 (14). С. 45-48) с привлечением беспилотных летательных аппаратов (БПЛА) с размещенной на его борту аппаратурой командной радиолинии управления и антенной для приема команд и данных от пункта боевого управления вместе с системой радиотелеметрических датчиков и бортовым радиотелеметрическим ответчиком. С помощью БПЛА осуществляют облет радиолокационной станции (РЛС) ЗРС по заранее установленным маршрутам на фиксированных азимутах и высотах, в ходе которого оценивают параметры зоны обнаружения и других характеристик РЛС, характеризуя их по таким параметрам, как дальность обнаружения на заданной высоте, минимальная дальность обнаружения, верхняя граница по высоте, верхняя граница по углу места, нижняя граница по углу места, для чего выполняют порядка 15 заходов на выбранной высоте, оценивают параметры зоны радиоканала «земля-борт» зенитной управляемой ракеты (ЗУР), оценивают основные характеристики головки самонаведения (ГСН) и радиовзрывателя (РВ).
Недостатком известного способа является его направленность на оценку характеристик ЗУР, ГСН, РВ и их каналов управления на траектории полета, а не на оценку состояния наземного оборудования систем.
Наиболее близким по технической сущности и назначению к заявленному изобретению (прототипом), является способ, описанный в пат. РФ № 2501031, МПК G01S7/40, опубл. 10.12.2013. Способ заключается в том, что в качестве средства мониторинга технического состояния наземных радиотехнических средств (РТС) используют дистанционно управляемый беспилотный летательный аппарат, оснащенный бортовой аппаратурой, с помощью которой измеряют с высокой точностью координаты объектов мониторинга оптическим устройством или иным высокоточным устройством и одновременно при работе указанных объектов формируют установленными на борту средства мониторинга бортовыми приемниками радионавигационные измерительные сигналы, которые кодируют, излучают в свободное пространство, принимают наземными устройствами, декодируют, обрабатывают совместно с сигналами с выхода оптического устройства, отображают и регистрируют результаты измерений и результаты совместной обработки сигналов.
Недостатками прототипа являются то, что способ ориентирован на проведение контроля только средств РТО радиомаячных систем без контроля технического состояния радиостанций, при том, что остается бесконтрольным значительное число приводных автоматических радиостанций, работающих в режимах «привод» и «связь» на позициях средств РТО радиомаячной группы (РМГ), а также группы радиосредств командно-диспетчерского пункта (КДП), обеспечивающих, как каналы радиосвязи, так и связь оперативного управления и взаимодействия различных наземных служб аэродрома; отсутствие канала обратной связи «земля-борт» для осуществления контроля настроек (регулировок) аварийного оборудования связи и РТО в режиме реального времени при переходах на резервные комплекты средств связи (СРС) и РТО и обратно. Кроме того, недостатком способа является большой расход канального ресурса, связанного с высокой загрузкой каналов воздушной радиосвязи в процессе проведения процедуры контроля, в связи с доведением всей доступной измерительной информации (ИИ), снимаемой с объектов контроля по каждому параметру контролируемого средства РТО, независимо от ее отнесения к аварийным (предаварийным) режимам, в направлении «борт-земля» до наземного КДП аэродрома, что в целом негативно влияет на оперативность процедуры проверки (мониторинга).
Таким образом, техническая проблема, возникающая при использовании способа-прототипа на внутренних водных путях, в портах, в районах с интенсивным движением судов, в «стесненных» водах каналов, шлюзов, проливов, проходов, фарватеров, прибрежных морских районах и пр., заключается в неполном охвате контролируемых объектов навигационного и телекоммуникационного оборудования, из-за ограниченных функциональных возможностей БПЛА, связанных с его малой грузоподъемностью, а также в затруднении (невозможности) съема измерительной информации с малых высот (а фактически, с границы водной поверхности), что важно для речных и морских судов, и в недостаточной оперативности проведения проверок в ближней и дальней зонах действия СНО из-за отсутствия канала обратной связи «берег – борт» для осуществления контроля настроек (регулировок) аварийного оборудования в режиме реального времени в процессе проверки, что замедляет процедуру мониторинга и принятие решения по ее результатам.
Техническим результатом, достигаемым с помощью заявляемого изобретения, является расширение перечня контролируемого берегового и плавучего оборудования и повышение оперативности процесса контроля технического состояния объектов.
Для достижения указанного результата используется следующая совокупность существенных признаков: в способе мониторинга технического состояния средств связи и навигационного оборудования также, как и в прототипе, измеряют координаты объектов мониторинга высокоточным измерительным прибором и одновременно формируют установленными на борту средства мониторинга бортовыми приемниками радионавигационные измерительные сигналы, которые кодируют, излучают в свободное пространство, принимают наземными устройствами, декодируют, обрабатывают совместно с сигналами с выхода измерительного прибора, отображают и регистрируют результаты измерений и результаты совместной обработки сигналов, в отличие от прототипа, в качестве средства мониторинга используют дистанционно управляемое безэкипажное водное судно (БЭВС), оснащенное бортовым автоматизированным измерительным комплексом (АИК), выполненным с возможностью охвата любых береговых и плавучих радиотехнических средств, излучающих сигналы в радио- или оптическом диапазоне волн, включая судовые радиостанции и береговые средства связи, стационарные и плавучие (судовые) навигационные огни и навигационное оборудование стационарных и плавучих радиоизлучающих СНО, контрольно-корректирующие станции автономной системы навигации (ККС), базовые станции автоматизированной системы управления движением судов (АСУ ДС) и др. При этом процедуру мониторинга осуществляют поэтапно, когда на предварительном этапе оценивают визуально и с помощью инструментального метода обстановку в бассейнах рек (озер) внутренних водных путей или прибрежной морской акватории по времени суток, года, климатическим факторам, интенсивности судоходства и внешним воздействиям на объекты мониторинга, определяют с помощью базы данных АСУ ДС состав контролируемых объектов мониторинга (n) на основных фазах проверки при использовании различных курсов движения судов, устанавливают с помощью геоинформационной подсистемы АСУ ДС координаты точек размещения стационарных и надводных СРС и СНО с учетом подготовки геопространственной информации, формируют с помощью коэффициентов значимости параметров перечень контролируемых параметров (m) каждого объекта мониторинга, на которые назначают эксплуатационные и профилактические допуски с учетом нормативно-технической документации и актуальной базы знаний берегового АИК АСУ ДС по результатам инструментального контроля предыдущих мероприятий технического обслуживания и процедур мониторинга, задают на основе анализа условий функционирования объектов мониторинга (день/ночь, осадки, помехи и пр.) значения ошибок первого и второго рода для повышения достоверности при определении вида технического состояния объектов мониторинга, комплектуют набор G измерительных модулей радионавигационных сигналов gij ∈ G бортового АИК БЭВС в зависимости от перечня контролируемых параметров  и подвергаемого мониторингу состава береговых и надводных СРС и СНО
и подвергаемого мониторингу состава береговых и надводных СРС и СНО  на основании укомплектованного набора G измерительных модулей бортового АИК и его массогабаритных показателей выбирают БЭВС малого или среднего класса, задают маршруты обхода ближней и дальней зон излучения СРС и СНО при проведении процедуры дистанционного мониторинга их параметров технического состояния, актуализируют базу знаний бортового АИК с базой знаний берегового АИК измерительной информацией о значениях параметров технического состояния СРС и СНО для обеспечения режима реального времени; на первом этапе выводят средство мониторинга с бортовым АИК на маршрут обхода СРС (СНО), при прохождении которого дистанционно измеряют доступные для контроля i-е параметры радиоизлучающих СРС и СНО с помощью бортовых измерительных модулей радионавигационных сигналов gij или излучающих в оптическом диапазоне навигационных огней с помощью видеокамеры высокого разрешения, сохраняют измеренные значения параметров в вейвлет-коэффициентах, сравнивают их методом вейвлет-анализа с сохраненными в базе знаний бортового АИК номинальными значениями и назначенными эксплуатационными и профилактическими допусками на них, обрабатывают измерительную информацию по m контролируемым параметрам всех n СРС и СНО для установления их вида технического состояния и, в случае выявления отказа или предотказного состояния – формируют сигнал об отказе или предотказном техническом состоянии СРС и СНО, кодируют его и излучают в свободное пространство; на втором этапе для идентификации отказа принимают береговым АИК сигнал с измерительной информацией об отказе или предотказном состоянии СРС и СНО, декодируют его и обрабатывают совместно с измерительной информацией базы знаний берегового АИК и объектовых баз данных СРС и СНО районных водных путей и судоходства, отображают и регистрируют сигнал об отказе или предотказном состоянии объекта мониторинга и принимают решение на включение резервного комплекта СРС и СНО и на проведение инструментального контроля или регулировок аварийного комплекта оборудования, формируют сигнал на БЭВС для повторного обхода соответствующей зоны включенного резервного комплекта СРС или СНО по процедуре первого этапа, кодируют сигнал на повторный обход аварийного СРС или СНО и излучают его в свободное пространство, принимают бортовым радиоприемным устройством БЭВС сигнал на проведение повторного обхода СРС или СНО, декодируют его для повтора процесса телеизмерений по циклу предыдущего этапа; на завершающем этапе заканчивают процедуру мониторинга со швартовкой БЭВС к причалу порта, актуализируют базу знаний берегового АИК АСУ ДС измерительной информацией из базы знаний бортового АИК БЭВС, корректируют исходные данные для предварительного этапа и для имитационных моделей автоматизированной подсистемы мониторинга АСУ ДС, формируют различные виды отчетов и протоколов измерений о техническом состоянии СРС и СНО по результатам мониторинга.
на основании укомплектованного набора G измерительных модулей бортового АИК и его массогабаритных показателей выбирают БЭВС малого или среднего класса, задают маршруты обхода ближней и дальней зон излучения СРС и СНО при проведении процедуры дистанционного мониторинга их параметров технического состояния, актуализируют базу знаний бортового АИК с базой знаний берегового АИК измерительной информацией о значениях параметров технического состояния СРС и СНО для обеспечения режима реального времени; на первом этапе выводят средство мониторинга с бортовым АИК на маршрут обхода СРС (СНО), при прохождении которого дистанционно измеряют доступные для контроля i-е параметры радиоизлучающих СРС и СНО с помощью бортовых измерительных модулей радионавигационных сигналов gij или излучающих в оптическом диапазоне навигационных огней с помощью видеокамеры высокого разрешения, сохраняют измеренные значения параметров в вейвлет-коэффициентах, сравнивают их методом вейвлет-анализа с сохраненными в базе знаний бортового АИК номинальными значениями и назначенными эксплуатационными и профилактическими допусками на них, обрабатывают измерительную информацию по m контролируемым параметрам всех n СРС и СНО для установления их вида технического состояния и, в случае выявления отказа или предотказного состояния – формируют сигнал об отказе или предотказном техническом состоянии СРС и СНО, кодируют его и излучают в свободное пространство; на втором этапе для идентификации отказа принимают береговым АИК сигнал с измерительной информацией об отказе или предотказном состоянии СРС и СНО, декодируют его и обрабатывают совместно с измерительной информацией базы знаний берегового АИК и объектовых баз данных СРС и СНО районных водных путей и судоходства, отображают и регистрируют сигнал об отказе или предотказном состоянии объекта мониторинга и принимают решение на включение резервного комплекта СРС и СНО и на проведение инструментального контроля или регулировок аварийного комплекта оборудования, формируют сигнал на БЭВС для повторного обхода соответствующей зоны включенного резервного комплекта СРС или СНО по процедуре первого этапа, кодируют сигнал на повторный обход аварийного СРС или СНО и излучают его в свободное пространство, принимают бортовым радиоприемным устройством БЭВС сигнал на проведение повторного обхода СРС или СНО, декодируют его для повтора процесса телеизмерений по циклу предыдущего этапа; на завершающем этапе заканчивают процедуру мониторинга со швартовкой БЭВС к причалу порта, актуализируют базу знаний берегового АИК АСУ ДС измерительной информацией из базы знаний бортового АИК БЭВС, корректируют исходные данные для предварительного этапа и для имитационных моделей автоматизированной подсистемы мониторинга АСУ ДС, формируют различные виды отчетов и протоколов измерений о техническом состоянии СРС и СНО по результатам мониторинга.
Сущность изобретения заключается в возможности дистанционного наблюдения за техническим состоянием береговых и плавучих СРС и СНО, позволяющего в случае их отказа или аварийного состояния принять решение об оперативной замене неработоспособного объекта. При этом способ обеспечивает контроль практически за всеми телекоммуникационными и навигационными устройствами, излучающими сигналы в радио- и оптическом диапазонах и расположенными в бассейнах рек (озер) ВВП РФ, акваториях портов, в районах интенсивного движения судов в «стесненных» водах фарватеров, каналов, шлюзов, проливов, проходов и пр. Указанный результат достигается за счет использования в качестве средства наблюдения дистанционно управляемого БЭВС, оснащенного бортовым АИК и обладающего более высокой в сравнение с БПЛА грузоподъемностью, вследствие чего может быть оборудован бóльшим по сравнению с прототипом количеством высокоточной аппаратуры. Одновременно обеспечивается повышение оперативности контроля за счет применения процедуры экспресс-контроля, когда вид технического состояния определяется не по всему перечню контролируемых параметров, предусмотренных НТД, а по их ограниченному числу вносящих наибольший «вклад» в повышение показателя надежности СРС и СНО; применения метода вейвлет-анализа при обработке и хранении измерительной информации, относящегося к методам контроля реального времени; трансляции от бортового в береговой АИК администрации бассейна ВВП не всего объема доступной измерительной информации по каждому объекту мониторинга, а только вида его технического состояния путем формирования соответствующего сигнала.
Сопоставление предлагаемого способа и прототипа показало, что поставленная задача – расширение перечня контролируемых СРС и СНО водных бассейнов и прибрежных морских акваторий и повышение оперативности процесса контроля технического состояния объектов – решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
В свою очередь, проведенный информационный поиск в области радиосвязи не выявил решений, содержащих отдельные отличительные признаки заявляемого изобретения, что позволяет сделать вывод о соответствии способа критерию «изобретательский уровень».
Сущность указанного способа поясняется графическими материалами где:
на фиг. 1 приведена блок-схема алгоритма способа мониторинга технического состояния средств связи и навигационного оборудования;
на фиг. 2 представлен вариант размещения стационарного и плавучего навигационного и телекоммуникационного оборудования системы связи и СНО на фрагменте зоны Невско-Ладожского района водных путей и судоходства администрации Волго-Балтийского бассейна;
на фиг. 3 показаны примеры средств мониторинга на базе безэкипажных судов а) и в) среднего класса; б) и г) малого класса;
на фиг. 4 представлена последовательность применения метода вейвлет-анализа в процедуре экспресс-контроля;
на фиг. 5 показан вероятностный граф определения вида технического состояния СС и СНО с учетом ошибок первого и второго рода;
на фиг. 6 показан вероятностный граф функционирования распределенной автоматизированной системы мониторинга СРС и СНО;
на фиг. 7 приведена надёжностная схема замещения вероятностного графа автоматизированной системы мониторинга СРС и СНО;
на фиг. 8 представлена процедура определения финальной вероятности работоспособности средства связи (СНО);
на фиг. 9 представлена процедура определения финальной вероятности отказа средства связи или навигационного оборудования;
на фиг. 10 представлен пример формирования области неопределенности при оценке технического состояния средств связи и СНО двумя выходными параметрами;
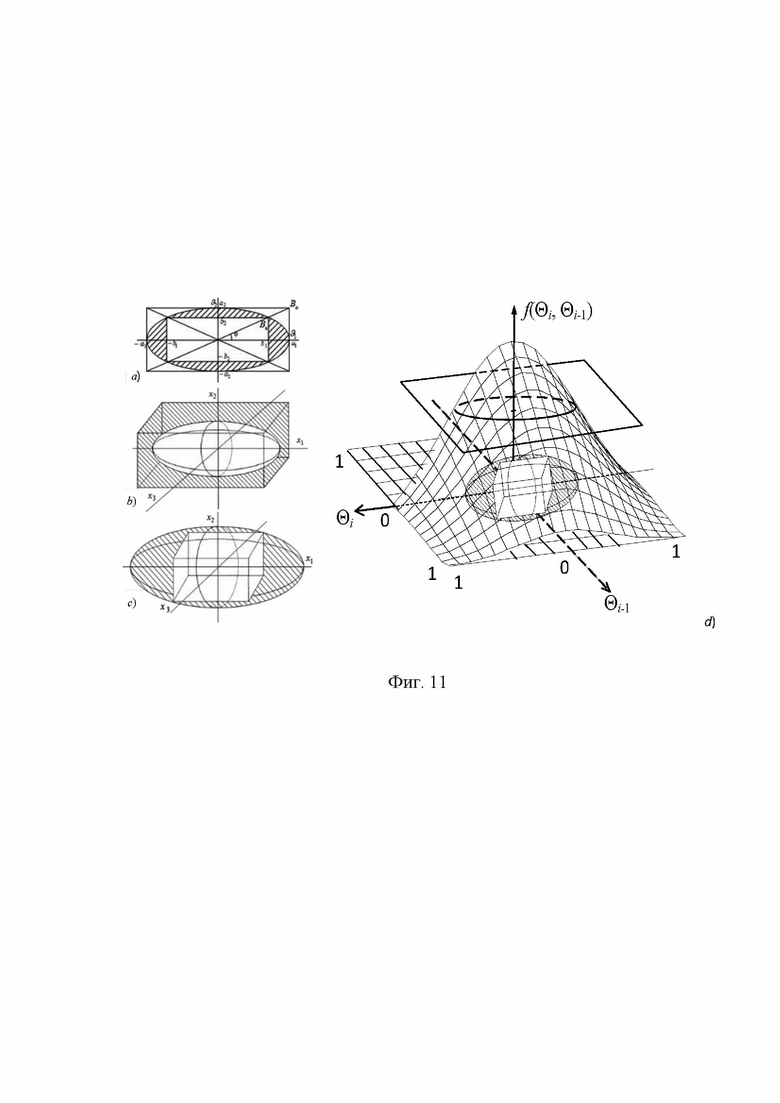
на фиг. 11 условно показана корреляция значений параметров m в многопараметрическом пространстве (m = 2, m = 3):
a) эллипс качества (m = 2) с учетом ошибок 1-го и 2-го рода;
b) эллипсоид качества (m = 3) с учетом ошибок 2-го рода;
с) эллипсоид качества (m = 3) с учетом ошибок 1-го рода;
d) тело неопределенности для коррелированных параметров СрС и СНО;
на фиг. 12 показана модель территориально-распределенного поля значений параметров качества системы связи и СНО района водных путей и судоходства (для отображения на экране монитора рабочего места оператора).
Пример реализации способа
Предварительным этапом способа является подготовка исходных данных для ведения процесса телеизмерений, при котором осуществляется следующая последовательность действий по нижеуказанным шагам 1-10.
На шаге 1 оценивают обстановку на участке акватории бассейна ВВП РФ или прибрежной морской акваторий по времени суток, года, климатическим факторам, интенсивности судоходства (периоду навигации) и внешним воздействиям на СРС и СНО и пр. (условия проведения мониторинга). Оценка обстановки осуществляется визуально или с помощью инструментального метода (в описании не приводится): время суток – по часам (по фотоэлементам), осадки – по гигрометру, время года – по термометру, уровень радиопомех – по радиоприемным устройствам анализа помеховой обстановки или по анализатору спектра и пр.
На шаге 2 определяют с помощью базы данных АСУ ДС состав n контролируемых СРС и СНО, обеспечивающих безопасную проводку судна по водному пути в кратчайший срок, с наименьшими отклонениями от оси судового хода для условий любой видимости, в различных метеорологических условиях, времени суток, помехах и других воздействиях (объем мониторинга). Состав контролируемых заявленным способом средств связи и СНО может варьироваться в зависимости от категории ВВП, перечня судовых ходов и сроков работы СНО, судоходных гидротехнических сооружений.
На шаге 3 устанавливают географические координаты точек размещения каждого j-го  стационарного или плавучего СРС и СНО с учетом их зон излучения и подготовки геопространственной информации (зона мониторинга). Вариант размещения стационарных и плавучих СРС и СНО на фрагменте зоны ответственности Невско-Ладожского района водных путей и судоходства приведен на фиг. 2. При этом места размещения отдельных СРС и СНО выбираются специалистами связи и СНО совместно с представителями лоцманской и инженерно-портовых служб. Причем зоны формирования диаграмм направленности излучения СРС и СНО должны соответствовать требованиям их НТД. Также координаты мест развертывания СРС и СНО выбираются в зависимости от условий судовождения, допускается совместное размещение нескольких средств СНО на одной позиции при выполнении требований по типовому размещению средств и обеспечению их электромагнитной совместимости. В отдельных случаях, когда по условиям местности (на ВВП) типовое размещение средств СНО невозможно, допускаются отступления от типового размещения с таким расчетом, чтобы обеспечить устойчивую работу средств СНО в секторах с наибольшей интенсивностью движения судов (в том числе во встречных направлениях). Отступления от типового размещения СРС и СНО движение судов должны компенсироваться введением мер, обеспечивающих эквивалентный уровень безопасности судовождения.
стационарного или плавучего СРС и СНО с учетом их зон излучения и подготовки геопространственной информации (зона мониторинга). Вариант размещения стационарных и плавучих СРС и СНО на фрагменте зоны ответственности Невско-Ладожского района водных путей и судоходства приведен на фиг. 2. При этом места размещения отдельных СРС и СНО выбираются специалистами связи и СНО совместно с представителями лоцманской и инженерно-портовых служб. Причем зоны формирования диаграмм направленности излучения СРС и СНО должны соответствовать требованиям их НТД. Также координаты мест развертывания СРС и СНО выбираются в зависимости от условий судовождения, допускается совместное размещение нескольких средств СНО на одной позиции при выполнении требований по типовому размещению средств и обеспечению их электромагнитной совместимости. В отдельных случаях, когда по условиям местности (на ВВП) типовое размещение средств СНО невозможно, допускаются отступления от типового размещения с таким расчетом, чтобы обеспечить устойчивую работу средств СНО в секторах с наибольшей интенсивностью движения судов (в том числе во встречных направлениях). Отступления от типового размещения СРС и СНО движение судов должны компенсироваться введением мер, обеспечивающих эквивалентный уровень безопасности судовождения.
На шаге 4 формируют перечень m контролируемых параметров СРС и СНО, подвергаемых проверке для различных режимов их функционирования, определяемых тактико-техническими характеристиками (ТТХ) (глубина мониторинга). Выбор перечня параметров  включаемых в процедуру мониторинга для каждого j-го СРС и СНО индивидуален. В качестве одного из подходов к определению перечня параметров мониторинга предложено использовать коэффициент (коэффициентом значимости Кзн), характеризующий тяжесть последствий и критичность отказа СРС или СНО при возникновении аварии (происшествия или инцидента) по причине выхода параметров за пределы установленных допусков, а также «вклад» каждого параметра в повышение показателя надежности объекта мониторинга, см. табл. 1. Для определения значимости включения в процедуру мониторинга того или иного параметра СРС или СНО из всего множества, представленного в нормативно-технической документации (НТД) используем общий коэффициент значимости
включаемых в процедуру мониторинга для каждого j-го СРС и СНО индивидуален. В качестве одного из подходов к определению перечня параметров мониторинга предложено использовать коэффициент (коэффициентом значимости Кзн), характеризующий тяжесть последствий и критичность отказа СРС или СНО при возникновении аварии (происшествия или инцидента) по причине выхода параметров за пределы установленных допусков, а также «вклад» каждого параметра в повышение показателя надежности объекта мониторинга, см. табл. 1. Для определения значимости включения в процедуру мониторинга того или иного параметра СРС или СНО из всего множества, представленного в нормативно-технической документации (НТД) используем общий коэффициент значимости  параметра, получаемый как сумма назначенных весов показателей Кзн по лингвистической шкале оценки. Суммарный коэффициент значимости , по которому происходит включение параметра в процедуру мониторинга, получаем путем суммирования коэффициентов значимости Кзн по каждому показателю лингвистической шкалы оценивания, в соответствии с выражением
параметра, получаемый как сумма назначенных весов показателей Кзн по лингвистической шкале оценки. Суммарный коэффициент значимости , по которому происходит включение параметра в процедуру мониторинга, получаем путем суммирования коэффициентов значимости Кзн по каждому показателю лингвистической шкалы оценивания, в соответствии с выражением  где m – общее число параметров, входящих в НТД объекта мониторинга. Ранжирование параметров, включаемых в процедуру мониторинга, осуществляют на разных уровнях структурирования СРС и СНО (комплекс, стойка, агрегат, узел) на основе анализа морфологических блоков и структурных взаимосвязей. Чем больше весовой коэффициент элемента, тем он важнее для обеспечения надежного функционирования СРС и СНО и безопасности судоходства. Перечень контролируемых в процессе мониторинга параметров определяют путем построения вариационного ряда из значений суммарных коэффициентов значимости каждого из предпочтительных для включения в процедуру i-го параметра из НТД объекта мониторинга по выражению:
где m – общее число параметров, входящих в НТД объекта мониторинга. Ранжирование параметров, включаемых в процедуру мониторинга, осуществляют на разных уровнях структурирования СРС и СНО (комплекс, стойка, агрегат, узел) на основе анализа морфологических блоков и структурных взаимосвязей. Чем больше весовой коэффициент элемента, тем он важнее для обеспечения надежного функционирования СРС и СНО и безопасности судоходства. Перечень контролируемых в процессе мониторинга параметров определяют путем построения вариационного ряда из значений суммарных коэффициентов значимости каждого из предпочтительных для включения в процедуру i-го параметра из НТД объекта мониторинга по выражению:

где i = 1, 2, …, k, …, l, …, u, …, r, …, m-1, m – параметры CРС (СНО) в соответствие с НТД. При этом в перечень параметров, включенных в процедуру мониторинга, попадают параметры с наибольшими значениями суммарных коэффициентов значимости в данном вариационном ряде. Число параметров контроля зависит от глубины ведения мониторинга, отводимого на него времени и доступных технологий.
Таблица 1 – Лингвистическая шкала оценки общего коэффициента значимости параметра, включенного в процедуру экспресс-контроля способа мониторинга
последствий
2. Отказ требует принятия экстренных мер по недопущению катастрофической ситуации.
3. Отказ ведет к потере некоторых эксплуатационных свойств, сокращающих период эксплуатации.
4. Отказ ведет к потере некоторых эксплуатационных свойств, не влияющих на период эксплуатации.
5. Отказ меняет рабочие режимы зависимых элементов системы, что ведет к увеличению вероятности их отказов.
0,8
0,6
0,4
0,2
2. Резерв возможен, но отсутствует.
3. Однократный резерв, без контроля состояния резерва.
4. Однократный резерв, состояние резерва контролируется.
5. Двукратный и более резерв без контроля состояния резерва.
6. Двукратный и более резерв, контроль состояния резерва есть.
0,8
0,6
0,4
0,2
0
2. Отказ считается возможным и вероятным (конструкция прошла достаточный объем испытаний, обеспечивающий приемлемый уровень вероятности безотказной работы).
3. Отказ возможен, но маловероятен (отказов данного элемента на предшествующих аналогах не наблюдалось).
4. Отказ возможен, но крайне маловероятен (при проектировании приняты меры для исключения отказа, обеспечен высокий показатель безотказности, достигнута стабильность характеристик, отсутствуют предельные температурные, радиационные, вибрационные нагрузки и т.д.
5. Отказ считается невозможным (отсутствуют логические условия для возникновения отказа).
0,8
0,6
0,4
0,2
2. Опыт эксплуатации при воздействиях внешних факторов отсутствует. Анализ предсказывает, что ресурс меньше проектного.
3. Фактический ресурс в реальных условиях эксплуатации близок к проектному.
4. Известно, что реальный ресурс больше проектного.
5. Отсутствуют неблагоприятные факторы внешнего воздействия в период эксплуатации.
0,8
0,6
0,4
0,2
2. Предусмотрен контроль без прогнозирования
3. Предусмотрен прогнозирующий контроль
0,5
0,1
2. Предусмотрены меры к локализации отказа.
3. Специальные меры к локализации отказа не нужны.
0,5
0,1
На шаге 5 назначают эксплуатационные и профилактические допуски с учетом НТД и актуальной базы знаний (БЗ) берегового АИК АСУ ДС по результатам инструментального контроля предыдущих мероприятий технического обслуживания и актуального мониторинга (точность мониторинга). Процедура расчета профилактических допусков на СРС и СНО с учетом их технического состояния и среды распространения радиосигнала (выбранной рабочей частоты), а также условий функционирования показана в [7, 8] и пояснена в [9].
На шаге 6 задают значения ошибок первого и второго рода («ложная тревога» и «пропуск отказа» соответственно) на основе анализа условий функционирования объектов мониторинга (день/ночь, осадки, помехи и пр.) для повышения достоверности при определении вида технического состояния объектов мониторинга (достоверность мониторинга). При этом решение задач минимизации ошибок первого и второго рода показано в [10].
На шаге 7 комплектуют набор G измерительных модулей радионавигационных сигналов gij ∈ G бортового АИК БЭВС в зависимости от перечня контролируемых параметров  и подвергаемого мониторингу состава береговых и надводных СрС и СНО (полезная нагрузка).
и подвергаемого мониторингу состава береговых и надводных СрС и СНО (полезная нагрузка).
На шаге 8 выбирают средство мониторинга в зависимости от условий его проведения (погодных условий), объема измерений и полезной нагрузки – БЭВС малого или среднего класса, оборудованные бортовым АИК, (вид средств мониторинга). Варианты средств мониторинга показаны на фиг. 3.
На шаге 9 задают (планируют, или корректируют заранее спланированные) маршруты обхода и точки наблюдения ближней и дальней зон излучения СРС (СНО) при проведении процедур дистанционного измерения параметров технического состояния выбранных объектов мониторинга (маршрут обхода).
На шаге 10 актуализируют базу знаний бортового АИК с БЗ берегового АИК измерительной информацией о значениях параметров технического состояния СРС и СНО для обеспечения режима реального времени (on-line). Для актуализации (переноса) информации баз данных могут использоваться как проводные каналы, так и беспроводные каналы связи (Wi-Fi), либо отчуждаемый носитель (USB-накопитель).
Первым этапом способа является проведение процесса телеизмерений бортовым АИК и в случае обнаружения отказа или предотказного состояния СРС и СНО трансляция этого сигнала в береговой АИК. Выполнение первого этапа способа происходит по шагам 11-22.
На шаге 11 осуществляют вывод средства мониторинга (БЭВС) с бортовым АИК по заранее установленному маршруту обхода СРС (СНО).
На шаге 12 дистанционно измеряют доступные контролю i-е параметры радиоизлучающих j-х СРС и СНО с помощью радиоприемников радионавигационных измерительных сигналов gij бортового АИК, а также излучающих в оптическом диапазоне навигационных огней с помощью видеокамеры высокого разрешения, размещенных на БЭВС.
На шаге 13 сохраняют измеренные значения параметров в базе знаний бортового АИК. При этом для снижения объемов сохраняемой измерительной информации и повышения оперативности ее обработки в базу знаний бортового АИК осуществляется запись лишь вейвлет-коэффициентов измеренных параметров, [11, 12]. Для примера на фиг. 4 приведена последовательность применения инструментов вейвлет-анализа в процедуре мониторинга навигационных огней и средств управления БЭВС: радиостанций декаметрового диапазона волн (ДКМВ) 20 МГц, командно-телеметрической радиолинии (КТР) 900 МГц и канала высокоскоростной связи (ВСКС) 2400 МГц.
На шаге 14 сравнивают измеренные значения параметров средств связи и СНО с сохраненными в БЗ бортового АИК их номинальными значениями в соответствии с НТД и назначенными на них допусками (эксплуатационными и профилактическими). Процедура сравнения измерительной информации, полученной от СРС и СНО с сохраненной в БЗ БЭВС бортового АИК на основе использования вейвлет-анализа подробно приведена в [11, 12].
На шаге 15 обрабатывают измерительную информацию i-го измеренного параметра конкретного средства связи или СНО с учетом эксплуатационных и профилактических допусков, а также минимизации ошибок первого и второго рода (заданной достоверности экспресс-контроля) для установления вида технического состояния. При этом процедура обнаружения отказа при многоуровневом контроле поясняется вероятностным графом определения вида технического состояния СРС и СНО с учетом ошибок первого и второго рода, приведенного на фиг. 5. Причем система мониторинга фактически реализует поэтапную процедуру экспресс-контроля, когда на первом этапе бортовым АИК происходит обнаружение отказа СРС или СНО, а на втором – его распознавание в береговом АИК с использованием объектовых АИК и наземных проводных каналов связи. При этом на фиг. 5 обозначены классы технического состояния СРС и СНО:
«1» – система работоспособна, ложно обнаруженный отказ не распознан;
«2» – система отказала, отказ обнаружен, но не распознан;
«3» – система работоспособна, ложное обнаружение и распознавание;
«4» – система отказала, отказ обнаружен и распознан, переход на резерв;
«5» – система работоспособна, признана работоспособной;
«6» – система отказала, но отказ не обнаружен [10].
На шагах 16 и 17 осуществляется проверка всех доступных измерениям m параметров на j-м средстве связи или средстве навигационного оборудования.
На шагах 18 и 19 осуществляется проверка всех n объектов мониторинга. В случае отсутствия выявления отказа (предотказного технического состояния) на объекте мониторинга (СРС, СНО) – переход к шагу 34. В случае обнаружения отказа (предотказного технического состояния) СРС (СНО), характеризующегося выходом значения измеряемых параметров за пределы установленных эксплуатационных или профилактических допусков, переход к шагу 20.
На шаге 20 формируют формализованный сигнал об отказе или предотказном состоянии СРС и СНО (о виде их технического состояния). При этом в отличие от способов, описанных в [1-5], в процессе контроля от бортового АИК на береговой АИК транслируется не вся доступная контролю измерительная информация, а только вид технического состояния в формализованном виде: нормальное, предаварийное или аварийное состояния. Тем самым осуществляется значительное сокращение объемов передаваемой информации. Предпочтительным с точки зрения достоверности контроля является статус «подтвержденного» результата измерений об исправности СРС и СНО или всей зоны мониторинга (класс технического состояния «5» – система работоспособна, признана работоспособной, см. фиг. 5). При получении результата измерения в виде класса технического состояния «4» (система отказала, отказ обнаружен и распознан) система мониторинга в автоматическом режиме должна выдать рекомендации оператору системы поддержки принятия решения (СППР) о переходе на резервный полукомплект СРС (СНО). Передача всей доступной измерительной информации на береговой АИК осуществляется только в случае определения вида технического состояния, отличного от «подтвержденных» статусов нормального функционирования или аварии, например, предотказное техническое состояние, характеризуемое статусами «ориентирующий», «экстраполированный», «недостоверный» [9, 11]. На вероятностном графе фиг. 5 данные состояния обозначены как «1», «2», «3», «6», характеризующие опасные состояния объекта мониторинга и требующие вмешательства оператора системы мониторинга СНО или АСУ ДС для принятия решения [13]. В некоторых случаях при распознавании аварийного состояния контролируемого СРС (СНО) после перевода его АСУ ДС на резерв оператор системы мониторинга СНО может запросить у бортового АИК всю доступную измерительную информацию для детального анализа ситуации в процессе диагностики отказавшего полукомплекта объекта мониторинга, поскольку для выявления отказа и проведения регулировок и тестовых проверок СРС и СНО только формализованного сигнала с классом его технического состояния недостаточно.
На шаге 21 кодируют формализованный сигнал об отказе (предотказном техническом состоянии) методами, принятыми в системах радиосвязи.
На шаге 22 излучают формализованный сигнал об отказе (предотказном техническом состоянии) объекта мониторинга в свободное пространство.
Вторым этапом способа является проведение процесса идентификации береговым АИК отказа, обнаруженного бортовым АИК на средстве мониторинга, при котором осуществляют выполнение шагов 23-33.
На шаге 23 принимают радиоприемными устройствами берегового АИК подсистемы мониторинга СНО АСУ ДС формализованный сигнал бортового АИК об отказе (предотказном техническом состоянии) СРС или СНО.
На шаге 24 декодируют сигнал об отказе (предотказном техническом состоянии) СРС или СНО методами, принятыми в системах радиосвязи.
На шаге 25 обрабатывают декодированный сигнал с бортового АИК средства мониторинга совместно с сигналами берегового АИК, а также с измерительной информацией инструментального контроля по проводным каналам телеизмерения-телесигнализации (ТИ-ТС) с аварийных объектовых АИК СРС и СНО, полученной как в ходе проведения предыдущих мероприятий технического обслуживания и мониторинга, так и по запросу оператора системы мониторинга СНО с сохранением её в базе знаний берегового АИК. При этом процедура идентификации отказа на втором этапе многоуровневого контроля подробно описана в [13]. Поскольку подсистема мониторинга СНО работает в интересах распределенной АСУ ДС, как элемента СППР, а ошибки первого рода («ложная тревога») и второго рода («пропуск отказа») возникают не только в АИК, но и при передаче ИИ по каналам телеизмерений («ТИ») и телесигнализации («ТС»), то вероятностный граф определения вида технического состояния средств связи и СНО, приведенный на фиг. 5 может быть преобразован в многоэтапный вероятностный граф функционирования всей АСУ ДС с учетом этапа передачи информации в СППР, как показано на фиг. 6. На данном графе появляется еще один этап, на котором также могут иметь место ошибки первого и второго рода – этап прогноза технического состояния СРС и СНО путем перехода на резервные комплекты телекоммуникационного и навигационного оборудования. Надёжностная схема замещения вероятностного графа АСУ ДС с учетом четвертого этапа принятия решения на восстановление оказавшего СРС и СНО (переход на резервный полукомплект) в СППР приведена на фиг. 7 и описана в [13]. Процесс определения финальной вероятности нормального функционирования системы Pнф с учетом ошибок первого α и второго β рода на разных этапах описан в [13], приведен на фиг. 8, а выражение для ее оценки имеет вид:

Процесс определения финальной вероятности отказа системы, также описан в [13] приведен, соответственно, на фиг. 9, а выражение для ее оценки имеет вид:

При этом на фиг. 6-9 обозначены:
Р 1 – априорная вероятность нормального функционирования объекта мониторинга (ОМ) (N);
Р
2 – априорная вероятность ненормального функционирования ОМ  ;
;
N – нормальное техническое состояние СРС (СНО), параметры в норме;
O – обнаружение отказа, выход параметра СРС (СНО) за пределы норм;
A – аварийное (предаварийное) техническое состояние СРС и СНО;
α – ошибка первого рода «ложная тревога» 
β – ошибка второго рода «необнаруженный отказ» 
Авт.рез. – автоматический переход на резервный комплект СРС (СНО);
Руч.рез. – ручное резервирование ОМ оператором системы мониторинга СНО после опроса объектового АИК районных водных путей и судоходства;
I, II, III, IV – этапы процедуры мониторинга;
«*» – вид технического состояния СРС и СНО на этапах мониторинга.
На этапе обнаружения отказа осуществляется контроль комплексного показателя СРС и СНО Λ(a) по заданному в исходных данных пороговому значению параметра a0. При выполнении заданного условия (например, Λ(a) > a0) формируется сигнал о нормальном функционировании СРС (СНО). Пороговые значения (допуски) на параметры  СРС и СНО, используются на различных k уровнях его функционирования
СРС и СНО, используются на различных k уровнях его функционирования  доступных для дистанционного съема ИИ (комплекс, стойка, блок, узел и пр.). Порядок определение допусков на параметры СРС и СНО приведен в [8] и поясняется фиг. 10, на которой приведен пример формирования области неопределенности при оценке технического состояния средств связи и СНО двумя выходными параметрами (m = 2), а также фиг. 11, на которой условно показана корреляция значений двух параметров (m = 2) в виде эллипса качества (фиг. 11, а) с учетом ошибок 1-го и 2-го рода, а также трех параметров (m = 3) в виде эллипсоида качества в многопараметрическом пространстве с учетом ошибок 2-го рода и ошибок 1-го рода (фиг. 11, b и с соответственно). При выходе значения обобщенного (комплексного) показателя за пределы допуска осуществляется измерение значений показателей технического состояния (параметров) на локальном уровне объектовым АИК непосредственно на позиции (на объекте) размещения СРС (СНО), которые на следующем этапе сравнивают с пороговыми значениями Λ(a) > a0 для идентификации места отказа. По результатам сравнения определяется нормальное техническое состояние СРС (СНО) (N) с вероятностью P1 = P(N), либо его аномальное техническое состояние
доступных для дистанционного съема ИИ (комплекс, стойка, блок, узел и пр.). Порядок определение допусков на параметры СРС и СНО приведен в [8] и поясняется фиг. 10, на которой приведен пример формирования области неопределенности при оценке технического состояния средств связи и СНО двумя выходными параметрами (m = 2), а также фиг. 11, на которой условно показана корреляция значений двух параметров (m = 2) в виде эллипса качества (фиг. 11, а) с учетом ошибок 1-го и 2-го рода, а также трех параметров (m = 3) в виде эллипсоида качества в многопараметрическом пространстве с учетом ошибок 2-го рода и ошибок 1-го рода (фиг. 11, b и с соответственно). При выходе значения обобщенного (комплексного) показателя за пределы допуска осуществляется измерение значений показателей технического состояния (параметров) на локальном уровне объектовым АИК непосредственно на позиции (на объекте) размещения СРС (СНО), которые на следующем этапе сравнивают с пороговыми значениями Λ(a) > a0 для идентификации места отказа. По результатам сравнения определяется нормальное техническое состояние СРС (СНО) (N) с вероятностью P1 = P(N), либо его аномальное техническое состояние  с вероятностью P2 =
с вероятностью P2 =  Аналогично происходит выявление нарушения работоспособности системы связи и СНО, т. е. ее аварийного состояния – (А) на последующих
Аналогично происходит выявление нарушения работоспособности системы связи и СНО, т. е. ее аварийного состояния – (А) на последующих  уровнях контроля и управления системой. Переход на следующий уровень идентификации отказа осуществляется при выполнении условия, что на предыдущем уровне было обнаружено аварийное состояние (А) и измеренные значения параметров этого уровня вышли за пределы допуска.
уровнях контроля и управления системой. Переход на следующий уровень идентификации отказа осуществляется при выполнении условия, что на предыдущем уровне было обнаружено аварийное состояние (А) и измеренные значения параметров этого уровня вышли за пределы допуска.
На шаге 26 отображают информацию о виде технического состояния аварийного СРС и СНО и критичном параметре на мониторе пульта оператора подсистемы мониторинга или на коллективном табло АСУ ДС, см. фиг. 12.
На шаге 27 регистрируют результаты измерений параметров СРС и СНО и результаты совместной обработки измерительной информации в базе знаний берегового АИК системы мониторинга в виде вейвлет-коэффициентов [11, 12].
На шаге 28 принимают решение на включение резервного комплекта СРС и СНО и на проведение инструментального контроля аварийного комплекта оборудования (повышение излучаемой мощности, корректировку ориентации излучающей антенны и др. регулировки). Если по результатам обработки всей доступной измерительной информации из берегового, бортового и объектового АИК отказ объекта мониторинга не определен, то переход к шагу 34. Если по результатам обработки всей доступной измерительной информации из берегового, бортового и объектового АИК отказ объекта мониторинга определен, то принимается решение на включение резервного комплекта СРС (СНО), для чего необходимо дать команду на повторную процедуру мониторинга включенного резервного полукомплекта СРС (СНО), т. е. переход к шагу 29. И только после этого могут быть начаты процедуры диагностики (определения места отказа) на аварийном комплекте.
На шаге 29 формируют сигнал на средство мониторинга для повторного обхода ближней (дальней) зоны включенного резервного комплекта СРС (СНО) по процедуре первого этапа способа (шаги 11-22). Также будет формироваться сигнал на средство мониторинга для повторного обхода вновь включенного основного комплекта объекта контроля после окончания на нем процедуры диагностики (регулировки или ремонта) для последующего осуществления перехода с резервного на основное СРС или СНО.
На шаге 30 кодируют сигнал на повторный обход аварийного СРС и СНО методами, принятыми в системах радиосвязи.
На шаге 31 излучают в свободное пространство сигнал на повторный обход средством мониторинга аварийного СРС (СНО).
На шаге 32 принимают бортовыми РПУ средства мониторинга формализованный сигнал на повторный обход контролируемого СРС (СНО).
На шаге 33 декодируют сигнал на повторный обход средством мониторинга СРС (СНО), далее процедуры первого этапа способа по шагам 11-22.
Завершающим этапом способа является актуализация базы знаний берегового АИК подсистемы мониторинга СРС (СНО) в соответствии с измерительной информацией бортового АИК средства мониторинга по шагам 34-37.
На шаге 34 заканчивают процедуру мониторинга со швартовкой БЭВС к причалу порта.
На шаге 35 актуализируют базу знаний берегового АИК подсистемы мониторинга СРС (СНО) измерительной информацией базы знаний бортового АИК с учетом проведенного экспресс-контроля в ходе процедуры мониторинга. Для актуализации (переноса) информации баз данных могут использоваться как проводные каналы, так и беспроводные каналы связи (Wi-Fi), либо отчуждаемый носитель (USB-накопитель).
На шаге 36 корректируют исходные данные программы предварительного этапа способа и для имитационных моделей системы мониторинга технического состояния элементов распределенной СРС и СНО [14].
На шаге 37 формируют различные виды отчетов и протоколов измерений о техническом состоянии СРС и СНО по результатам экспресс-контроля, проведенного в ходе процедуры мониторинга.
Заявленный способ мониторинга может быть использован:
при вводе СРС и СНО в эксплуатацию;
при периодических плановых поверках СРС и СНО и в ходе их технического обслуживания (инструментального контроля);
при неплановых поверках СРС и СНО, связанных с замечаниями или жалобами капитанов судов, а также при воздействиях на СРС и СНО искусственного и естественного характера (техногенных катастроф, ураганов и пр.);
при разработке и испытаниях новых образцов СРС и СНО, систем посадки и радионавигационных систем для пилотируемой и беспилотной авиации наземного и водного базирования;
при выполнении научно-исследовательских работ в области совершенствования СРС и СНО и повышения их эффективности функционирования;
при проведении обучения специалистов речного и морского флота.
Предлагаемое изобретение было создано специалистами кафедры судоходства на внутренних водных путях и научного центра ФГБОУ ВО «Государственный университет морского и речного флота имени адмирала С.О. Макарова» в составе научно-исследовательской работы. Были произведены экспериментальные исследования и расчеты, показавшие возможность использования заявляемого способа для мониторинга технического состояния берегового и плавучего навигационного и телекоммуникационного оборудования внутренних водных путей Российской Федерации, а также в портах и прибрежных морских районах, в том числе в районах с интенсивным судоходством.
Изложенное позволяет сделать вывод о соответствии изобретения критерию «промышленная применимость».
Источники информации
1. Обновление сигнализации на внутренних водных путях (СИГВВП-2002). Европейская Экономическая Комиссия / Комитет по внутреннему транспорту / Рабочая группа по внутреннему водному транспорту / Рабочая группа по унификации технических предписаний и правил безопасности на внутренних водных путях / XXIV-я сессия ООН, 5-7.06.2002. TRANS/SC.3/WP.3/2002/17 12 March 2002.
2. Приказ Министерства транспорта Российской Федерации от 18.01.2005. № 1. г. Москва, Об утверждении Федеральных авиационных правил «Летные проверки наземных средств радиотехнического обеспечения полетов, авиационной электросвязи и систем светосигнального оборудования аэродромов гражданской авиации» // Российская газета. – № 3733. – 2005. – 31 марта.
3. Раев А.А., Вороник В.И., Кононенко А.В., Кузнецов М. М., Раев А.А. Использование беспилотных летательных аппаратов при оценке характеристик ЗРС // Вестник воздушно-космической обороны. 2017. № 2 (14). С. 45-48.
4. Радиомаяки радиотехнической системы ближней навигации. Методы летных испытаний. ГОСТ 26904-86. ИПК. Издательство стандартов. 1997.
5. Войтович Н.И., Жданов Б.В. Способ летных проверок наземных средств радиотехнического обеспечения полетов и устройства для его применения // Патент на изобретение RU 2501031 С2, опубл. 10.12.2013, бюл. № 34.
6. Методические указания по летной проверке наземных радиомаяков инструментальной системы посадки аппаратурой летного контроля АЛК-70. – М.: ГосНИИ ГА, 1976. – 9 с.
7. Абрамов О.В. Планирование профилактических коррекций параметров технических устройств и систем // Информатика и системы управления. 2017. № 3 (53). С. 55-66.
8. Федоренко В.В., Будко П.А. Расчет эксплуатационных допусков на параметры каналообразующей аппаратуры // Известия высших учебных заведений. Радиоэлектроника. 2000. Т. 43. № 3-4. С. 55-60.
9. Винограденко А.М., Меженов А.В., Будко Н.П. К вопросу обоснования понятийного аппарата неразрушающего экспресс-контроля технического состояния оборудования системы связи и радиотехнического обеспечения аэродрома // Наукоемкие технологии в космических исследованиях Земли. 2019. Т. 11. № 6. С. 30-44. doi: 10.24411/2409-5419-2018-10293.
10. Будко П.А. Управление ресурсами информационно-телекоммуникаци-онных систем. Методы оптимизации: Монография. – СПб.: ВАС, 2012. – 512 с.
11. Kotenko I.V., Budko P.A., Vinogradenko A.M., Saenko I.B. An Approach for Intelligent Evaluation of the State of Complex Autonomous Objects Based on the Wavelet Analysis // The 18th International conference on intelligent software methodologies, tools and techniques (SOMET'2019). Kuching, Sarawak, Malaysia, 23-25 September 2019. С. 25-38. doi: 10.3233/FAIA190036.
12. Будко П.А., Жуков Г.А., Винограденко А.М., Гойденко В.К. Определение аварийного состояния морского робототехнического комплекса по многоэтапной процедуре контроля на основе использования вейвлет-преобразований // Морская радиоэлектроника. 2016. № 4 (58). С. 18-23.
13. Аллакин В.В., Будко Н.П. Идентификация состояния узлов информационно-телекоммуникационных сетей общего пользования подсистемой мониторинга информационной безопасности // Техника средств связи. 2020. № 3 (151) С. 58-64.
14. Яшин А.И., Будко П.А., Винограденко А.М., Педан А.В. Имитационное моделирование автоматизированной системы контроля технического состояния элементов распределенных радиоцентров // Морская радиоэлектроника. 2018. № 1 (63). С. 32-37.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ СРЕДСТВ СВЯЗИ И НАВИГАЦИОННОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2774400C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОГО МОНИТОРИНГА СОСТОЯНИЯ ИНФОРМАЦИОННО-ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ | 2024 |
|
RU2841123C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ИНФОРМАЦИОННО-ПРЕОБРАЗУЮЩИХ ЭЛЕМЕНТОВ БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНОГО СУДНА НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2022 |
|
RU2802976C1 |
| СПОСОБ ТЕХНИЧЕСКОГО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПОДДЕРЖКОЙ ПРИНЯТИЯ РЕШЕНИЙ И КОМПЛЕКС КОНТРОЛЬНО-ПРОВЕРОЧНОЙ АППАРАТУРЫ С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557771C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ СУДОХОДСТВА СЕВЕРНОГО МОРСКОГО ПУТИ С ИСПОЛЬЗОВАНИЕМ КАНАЛОВ МЕТЕОРНОЙ СВЯЗИ | 2016 |
|
RU2612592C1 |
| СПОСОБ КОМПЛЕКСНОГО МОНИТОРИНГА СОСТОЯНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И СИСТЕМ | 2020 |
|
RU2759327C1 |
| Система мониторинга технического состояния подводного добычного комплекса | 2021 |
|
RU2774662C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СИСТЕМА НАВИГАЦИИ СУДОВ | 2022 |
|
RU2795999C1 |
| Система поддержки принятия решений с модульной структурой для операторов судов двойного действия | 2019 |
|
RU2713077C1 |











Изобретение относится к радиотехнике и предназначено для осуществления в режиме реального времени проверок технического состояния берегового и плавучего навигационного и телекоммуникационного оборудования базовых станций (БС) автоматической идентификационной системы (АИС) внутренних водных путей (ВВП) Российской Федерации (РФ), а также портов и прибрежных морских районов, в том числе районов с интенсивным судоходством. Техническим результатом является расширение перечня контролируемого берегового и плавучего оборудования и повышение оперативности процесса контроля технического состояния объектов. В заявленном способе используют систему мониторинга, состоящую из берегового и бортового автоматизированных измерительных комплексов (АИК) с базами знаний, расположенных соответственно на берегу и на борту средства мониторинга (СрМ). Бортовым АИК измеряют координаты СрС и СНО и одновременно формируют радионавигационные сигналы, которые кодируют, излучают, принимают береговым АИК, декодируют, обрабатывают совместно с сигналами с выхода измерительного прибора берегового АИК, отображают и регистрируют результаты измерений и результаты совместной обработки сигналов. В качестве средства мониторинга используют дистанционно управляемое безэкипажное водное судно (БЭВС), оснащенное бортовым автоматизированным измерительным комплексом (АИК), выполненным с возможностью приема сигналов СрС и СНО различных диапазонов волн, выделенных для связи на внутренних водных путях Российской Федерации (ВВП РФ). 12 ил., 1 табл.
Способ мониторинга технического состояния береговых и плавучих средств связи (СрС) и навигационного оборудования (СНО), с помощью системы мониторинга, состоящей из берегового и бортового автоматизированных измерительных комплексов (АИК) с базами знаний, расположенных соответственно на берегу и на борту средства мониторинга (СрМ), характеризующийся тем, что бортовым АИК измеряют координаты СрС и СНО и одновременно формируют радионавигационные сигналы, которые кодируют, излучают, принимают береговым АИК, декодируют, обрабатывают совместно с сигналами с выхода измерительного прибора берегового АИК, отображают и регистрируют результаты измерений и результаты совместной обработки сигналов, отличающийся тем, что в качестве СрМ использовано дистанционно управляемое безэкипажное водное судно (БЭВС), оснащенное бортовым АИК, выполненным с возможностью приема сигналов СрС и СНО различных диапазонов волн, выделенных для связи на внутренних водных путях Российской Федерации (ВВП РФ) и морской подвижной службы, при этом при проведении мониторинга:
- на предварительном этапе оценивают обстановку в акваториях внутренних водных путей (ВВП) или прибрежной морской акватории по времени суток, года, климатическим факторам, интенсивности судоходства и внешним воздействиям на объекты мониторинга,
- с помощью автоматизированной системы управления движением судов (АСУ ДС) определяют состав контролируемых СрС и СНО (n),
- устанавливают координаты точек размещения контролируемых СрС и СНО,
- формируют перечень контролируемых параметров (m) каждого контролируемого СрС и СНО, на которые назначают эксплуатационные и профилактические допуски,
- задают значения ошибок первого и второго рода для повышения достоверности при определении вида технического состояния контролируемых СрС и СНО,
- комплектуют набор G измерительных модулей радионавигационных сигналов  бортового АИК в зависимости от перечня контролируемых параметров
бортового АИК в зависимости от перечня контролируемых параметров  и состава контролируемых СрС и СНО
и состава контролируемых СрС и СНО 
- на основании укомплектованного набора G измерительных модулей бортового АИК и его массогабаритных показателей выбирают СрМ малого или среднего класса,
- задают маршруты обхода ближней и дальней зон излучения контролируемых СрС и СНО при проведении процедуры дистанционного мониторинга параметров их технического состояния,
- актуализируют базу знаний бортового АИК с базой знаний берегового АИК измерительной информацией о значениях параметров технического состояния контролируемых СрС и СНО для обеспечения режима реального времени,
- на первом этапе выводят СрМ с бортовым АИК на маршрут обхода контролируемых СрС или СНО, при прохождении которого дистанционно измеряют доступные для контроля i-е параметры радиоизлучающих СрС или СНО,
- сохраняют измеренные значения параметров в вейвлет-коэффициентах,
- сравнивают их методом вейвлет-анализа с сохраненными в базе знаний бортового АИК номинальными значениями,
- обрабатывают измерительную информацию по m контролируемым параметрам всех контролируемых СрС и СНО для установления их вида технического состояния и,
- в случае выявления отказа или предотказного состояния – формируют сигнал об отказе или предотказном техническом состоянии СрС или СНО, кодируют и излучают его;
- на втором этапе для идентификации отказа принимают береговым АИК сигнал с измерительной информацией об отказе или предотказном состоянии СРС или СНО, декодируют его и обрабатывают совместно с измерительной информацией базы знаний берегового АИК и объектовых баз данных СрС и СНО,
- отображают и регистрируют сигнал об отказе или предотказном состоянии СрС или СНО и принимают решение на включение резервного комплекта СрС или СНО и на проведение инструментального контроля или регулировок аварийного комплекта оборудования,
- формируют сигнал на бортовой АИК для повторного обхода соответствующей зоны включенного резервного комплекта СрС или СНО по процедуре первого этапа,
- на завершающем этапе заканчивают процедуру мониторинга со швартовкой СрМ к причалу порта, актуализируют базу знаний берегового АИК АСУ ДС измерительной информацией из базы знаний бортового АИК, корректируют исходные данные для предварительного этапа и для имитационных моделей автоматизированной подсистемы мониторинга АСУ ДС, формируют различные виды отчетов и протоколов измерений о техническом состоянии СРС и СНО по результатам мониторинга.

