Изобретение относится к гидроакустике и может быть использовано для построения системы морского мониторинга, работой которой управляет программируемый нейросетевой комплекс.
Предлагаемый способ реализуется на основе вычислительных операций искусственных нейронных сетей, средствах морского приборостроения и технологии дальнего параметрического приема волн в звуковом и инфразвуковом диапазонах частот.
Применение вычислительных операций искусственных нейронных сетей с предварительным сжатием информации и пополняемых библиотек математически обработанных образов спектрограмм объектов ускоряет процесс распознавания и повышает вероятность классификации как надводных, так и подводных целей, обнаруженных при дальнем параметрическом приеме по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объектов (см. Мироненко М.В., Малашенко А.Е., Карачун Л.Э., Василенко А.М. Низкочастотный просветный метод дальней гидролокации гидрофизических полей морской среды: монография. - Владивосток: СКБ САМИ ДВО РАН, 2006. - 173 с.; Пятакович В.А., Василенко А.М., Хотинский О.В. Распознавание и классификация источников формирования полей различной физической природы в морской среде: монография. - Владивосток: Мор. гос. ун-т, 2017. - 255 с; Пятакович В.А., Василенко А.М., Хотинский О.В. Нейросетевые технологии в интеллектуальных системах обнаружения и оперативной идентификации морских целей: монография. - Владивосток: Мор. гос. ун-т, 2018. - 263 с.).
Как известно, извлечение полезной информации из сигналов определяет основы алгоритмизации обработки данных в интеллектуальных системах обнаружения и распознавания (классификации) источников. Процесс формирования и предварительной обработки входных информационных массивов (векторов признаков) предназначен для решения двух задач, первая из которых представляет собой создание библиотеки эталонных образцов, необходимых для обучения распознающей сети, и вторая для распознавания целей. Обучение распознающей сети производится на основе алгоритма обратного распространения ошибки, реализующего градиентный метод оптимизации функционала вида:

Известны способы и реализующие их параметрические антенны, использующие высокочастотную (десятки-сотни кГц) накачку морской среды (см. Новиков Б.К., Тимошенко В.И. Параметрические антенны в системах гидролокации. - Л.: Судостроение. - 1990. - С. 17-40, 203-225), недостатками которых являются малая дальность параметрического приема волн (сотни метров и только в отдельных случаях 1-2 километра) и ограниченная возможность измерения пространственно-временных характеристик сигналов, что особенно проявляется при приеме волн различной физической природы низкого, инфразвукового и дробного диапазонов частот.
Известны способы и реализующие их параметрические антенны, работа которых основана на низкочастотной подсветке (накачке) среды слабозатухающими сигналами с частотой десятки-сотни герц, которые формируют в морской среде протяженные зоны нелинейного взаимодействия и параметрического преобразования сигналов, что приводит к увеличению дальности параметрического приема волн в десятки-сотни раз, относительно высокочастотных параметрических антенн (см. Дальний параметрический прием электромагнитных волн, формируемых техническими источниками в морской среде. Датчики и системы - М.: 2016. - № 8-9 (206). - С. 14-18).
Дальний параметрический прием информационных волн основан на закономерностях нелинейного взаимодействия и параметрического преобразования излученных волн накачки среды с волнами, генерируемыми объектами, при их совместном распространении в морской среде. Диапазон частот принимаемых волн составляет десятки-единицы килогерц, сотни-десятки-единицы-доли герц, включая сверхнизкочастотные колебания движущихся объектов.
Известно, что результатом параметрического преобразования взаимодействующих волн является их взаимная амплитудно-фазовая модуляция. Малое отличие частот (в пределах одного порядка) волн накачки среды и волн, генерируемых объектом, обеспечивает наиболее интенсивное их взаимодействие. Амплитуда взаимодействующих волн и индекс фазовой модуляции могут быть представлены в следующем виде

где γ - коэффициент нелинейности морской среды; 







Сформированные в результате преобразования волн параметрические составляющие суммарной и разностной частоты при обработке широкополосных сигналов выделяются, как признаки амплитудно-фазовой модуляции низкочастотной волны накачки морской среды полями и излучениями, генерируемыми объектами, что обосновано математическими зависимостями и подтверждено результатами морских экспериментов (см. Мироненко М.В., Малашенко А.Е., Карачун Л.Э., Василенко А.М. Низкочастотный просветный метод дальней гидролокации гидрофизических полей морской среды: монография. - Владивосток: СКБ САМИ ДВО РАН, 2006. - 173 с.).
Спектр взаимодействующих волн состоит из бесконечного числа боковых составляющих, частоту и амплитуду которых можно найти из известного выражения



где 






Как видно из выражения, значения частот боковых составляющих отличаются от удвоенной центральной частоты 2ω (равной сумме частот взаимодействующих волн) на величину Δ n⋅Ω, где n - любое целое число. Амплитуды боковых составляющих для соответствующих частот (2ω±nΩ) определяются величиной множителя 
При малых значениях коэффициента модуляции 
Наиболее близким по технической сущности к заявляемому изобретению является способ параметрического приема волн различной физической природы в морской среде (пат. №2453930 РФ, МПК G10K 11/00, G01S 15/02; опубл. 20.06.2012, бюл. №17), заключающийся в том, что сначала в морской среде формируют зону нелинейного взаимодействия и параметрического преобразования волн накачки волнами объекта посредством излучения в нее низкочастотного акустического сигнала, для чего излучатель и приемный преобразователь размещают на противоположных границах контролируемого участка морской среды, затем волны накачки, промодулированные волнами объекта, принимают и усиливают в полосе параметрического преобразования, переносят их частотно-временной масштаб в высокочастотную область, проводят узкополосный спектральный анализ, выделяют параметрические составляющие суммарной или разностной частоты, по которым с учетом временного и параметрического преобразования волн восстанавливают характеристики сигналов объекта.
К недостаткам способа-прототипа можно отнести следующие:
- невозможность корректировки процесса генерации излучаемых сигналов накачки среды в соответствии с задачами и условиями длительного морского мониторинга;
- отсутствие операций, которые обеспечивают нейросетевое распознавание (классификацию) объектов, обнаруженных при дальнем параметрическом приеме взаимодействующих в морской среде волн, что ограничивает функциональные возможности способа-прототипа;
- отсутствие операций, которые реализуют предварительное сжатие информации об объекте, что сокращает время, затрачиваемое на работу и процесс обучения искусственной нейронной сети и повышает оперативность нейросетевого распознавания (классификации) цели.
Задача, на решение которой направлено заявляемое изобретение, заключается в расширении функциональных возможностей способа-прототипа, т.е. его реализации как способа формирования системы морского мониторинга с программируемым нейросетевым комплексом управления, аппаратные и программные средства которых должны обеспечивать дальний параметрический прием взаимодействующих волн с корректировкой процесса генерации излучаемых сигналов накачки среды в соответствии с задачами и условиями длительного морского мониторинга, а также осуществлять распознавание (классификацию) обнаруженных объектов на основе вычислительных операций искусственных нейронных сетей с предварительным сжатием информации об объекте и пополняемых библиотеках математически обработанных образов спектрограмм морских целей.
Техническим результатом предлагаемого изобретения является обеспечение дальнего параметрического приема волн в звуковом и инфразвуковом диапазонах частот с корректировкой процесса генерации излучаемых сигналов накачки среды в соответствии с задачами и условиями длительного морского мониторинга, а также распознавание (классификация) обнаруженных объектов на основе вычислительных операций искусственных нейронных сетей с применением предварительного сжатия информации об объекте и пополняемых библиотеках математически обработанных образов спектрограмм целей.
Для решения поставленной задачи разработан способ формирования системы морского мониторинга с программируемым нейросетевым комплексом управления, заключающийся в том, что сначала в морской среде формируют зону нелинейного взаимодействия и параметрического преобразования волн накачки волнами объекта посредством излучения в нее низкочастотного акустического сигнала, для чего излучатель и приемный преобразователь размещают на противоположных границах контролируемого участка морской среды, затем волны накачки, промодулированные волнами объекта, принимают и усиливают в полосе параметрического преобразования, переносят их частотно-временной масштаб в высокочастотную область, проводят узкополосный спектральный анализ, выделяют параметрические составляющие суммарной или разностной частоты, по которым с учетом временного и параметрического преобразования волн восстанавливают характеристики сигналов объекта. Принципиально отличающийся от прототипа тем, что амплитудно-частотные характеристики сигналов объекта, полученные с помощью узкополосного спектрального анализа в тракте приема, обработки и регистрации сигналов, подают в дополнительно введенный нейросетевой комплекс управления на вход фильтра блока предварительной обработки, где осуществляют фильтрацию дискретных составляющих в соответствии с заданным для нейронной сети диапазоном частот, затем прореженный набор дискретных составляющих подают на вход блока подготовки данных блока предварительной обработки, где вычисляют статистические параметры объекта и сжимают их по методу Колмогорова - Хинчина; далее на первый вход категоризатора типа цели модуля нейросетевого распознавания поступают данные с выхода блока подготовки данных блока предварительной обработки, а на второй его вход поступают данные с блока обучения модуля нейросетевого распознавания, в память которого записаны математически обработанные образы спектрограмм морских целей, после чего искусственную нейронную сеть категоризатора типа цели настраивают по классификационным признакам целей, запускают вычислительные операции, по результатам которых корректируют её весовые коэффициенты и формируют вывод о степени принадлежности анализируемой области спектра объекту классификации (надводный или подводный объект); далее сигнал передают в блок управления нейросетевого комплекса управления, где формируют и подают команды в тракт излучения на вход генератора сигналов накачки стабилизированной частоты, где генерируют сигналы накачки морской среды в соответствии с задачами и условиями длительного морского мониторинга.
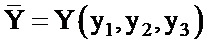
Изобретение поясняется чертежами, где на фиг. 1 показана структурная схема системы морского мониторинга с программируемым нейросетевым комплексом управления, реализующая предлагаемый способ, которая содержит следующие элементы:
1. Излучатель.
2. Приемный преобразователь.
3. Морская среда.
4. Зона нелинейного взаимодействия и параметрического преобразования волн накачки волнами объекта.
5. Объекты (морские цели, генерирующие акустические, электромагнитные и гидродинамические излучения).
6. Тракт излучения.
6.1. Генератор сигналов накачки стабилизированной частоты.
6.2. Усилитель мощности.
6.3. Блок согласования.
7. Тракт приема, обработки и регистрации информационных сигналов.
7.1. Широкополосный усилитель.
7.2. Преобразователь частотно-временного масштаба.
7.3. Спектроанализатор.
7.4. Рекордер.
8. Нейросетевой комплекс управления.
9. Блок предварительной обработки.
9.1. Фильтр.
9.2. Блок подготовки данных.
10. Модуль нейросетевого распознавания.
10.1. Категоризатор типа цели.
10.2. Блок обучения.
11. Блок управления.
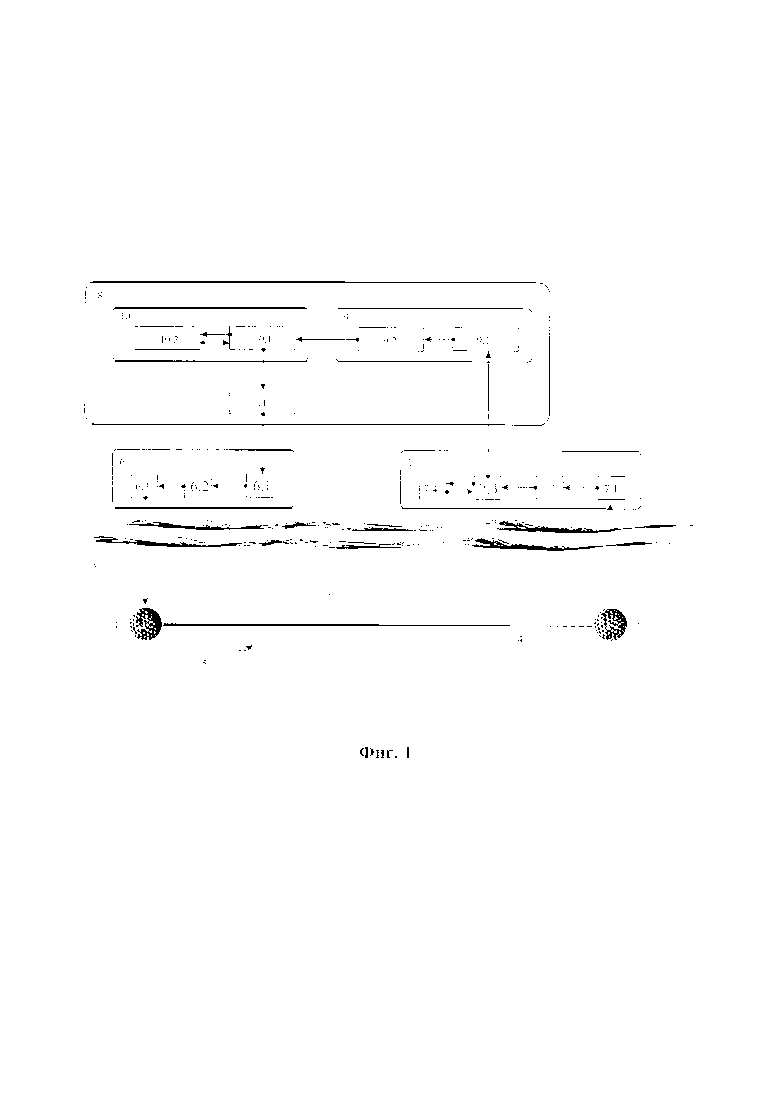
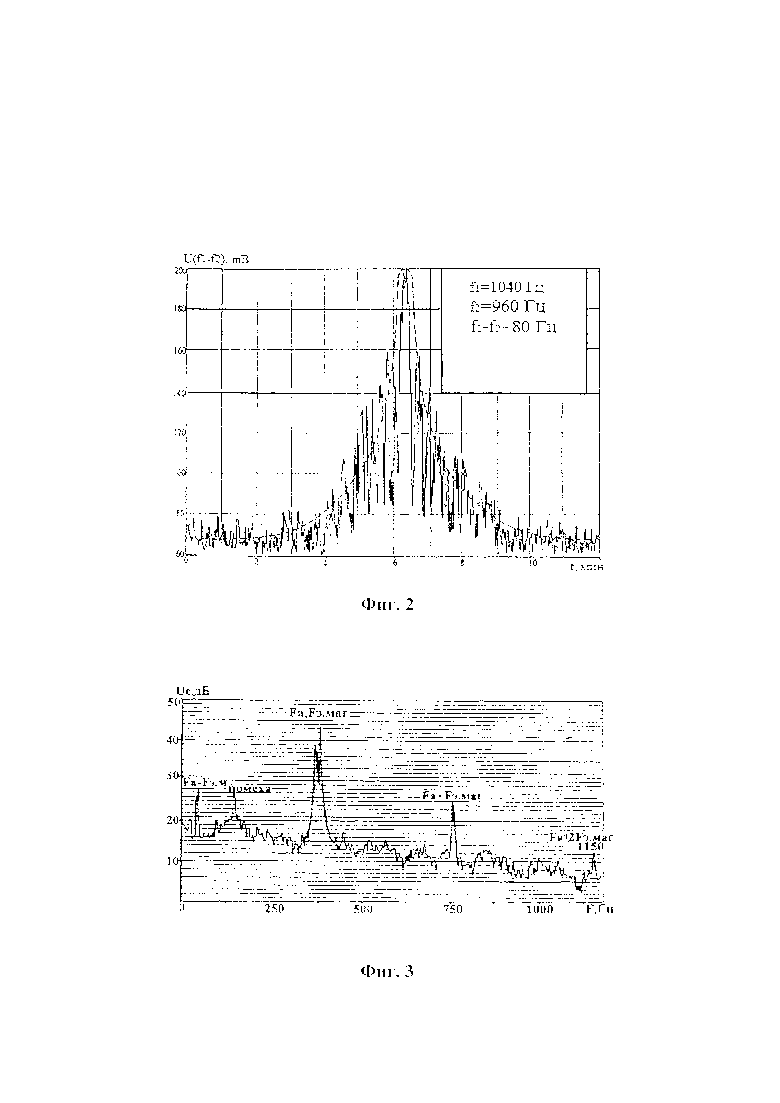
На фиг. 2 приведен уровень информационной волны разностной частоты, сформированной нелинейной областью кильватерного следа катера. Частота сигналов накачки морской среды составляла 1040 Гц и 960 Гц. Частота информационного сигнала разностной частоты составляла 80 Гц. Протяженность трассы приема-передачи сигналов составляла 25 км.
На фиг. 3 представлен спектр излучений судна, измеренный при дальнем параметрическом приеме взаимодействующих в морской среде акустических и электромагнитных волн. Частота подсветки среды Fa = 390 Гц, протяженность трассы 45 км. В спектре сигналов наблюдаются параметрические составляющие суммарной и разностной частоты от исходных частот акустической подсветки среды и электромагнитных излучений судна.
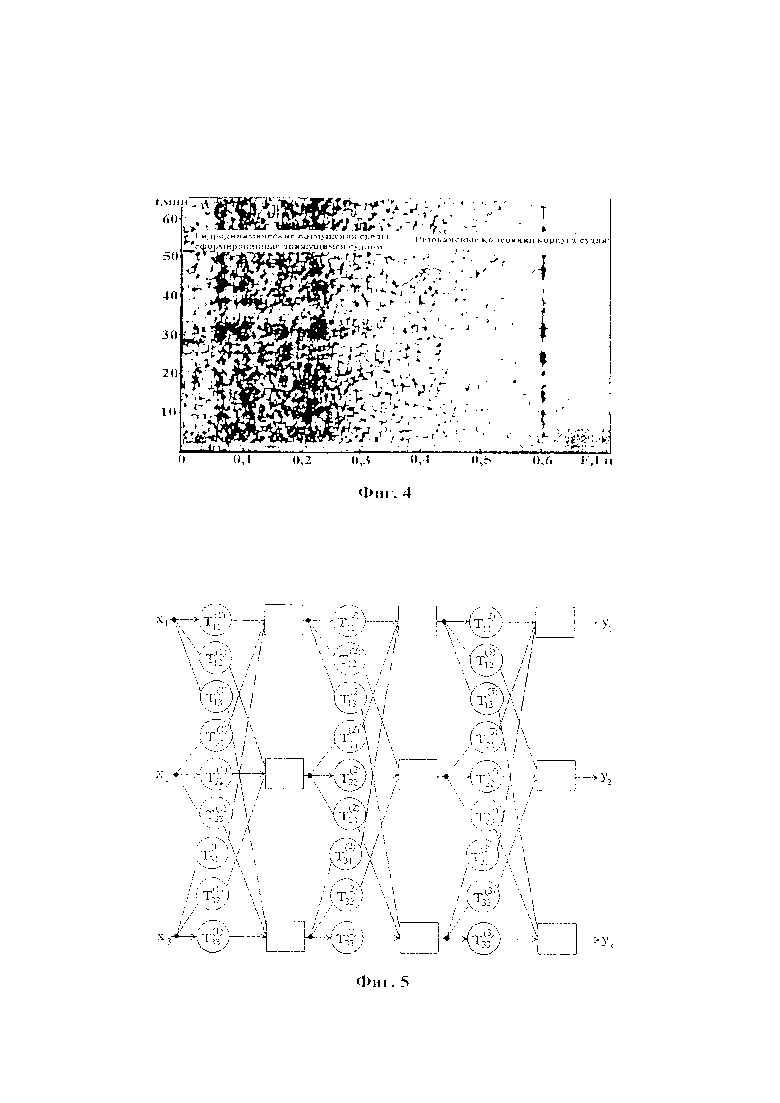
На фиг. 4 приведена спектрограмма шумового поля морского судна, на которой наблюдается гидродинамическое поле кильватерного следа и дискретная составляющая резонансных колебаний корпуса судна. Частота просветных сигналов составляла 400 Гц, протяженность просветной трассы составляла 30 км.
Общая структура распознающей сети представлена на фиг. 5. Нейроны, составляющие сеть, одинаковы и имеют функцию активации известного типа
где x2n(i), yn(i) и In(i) - значения r - го входного сигнала, выходного сигнала и внешнего смещения n - го нейрона i - го слоя; Ni - число нейронов в i - м слое; i = 1, 2, 3.
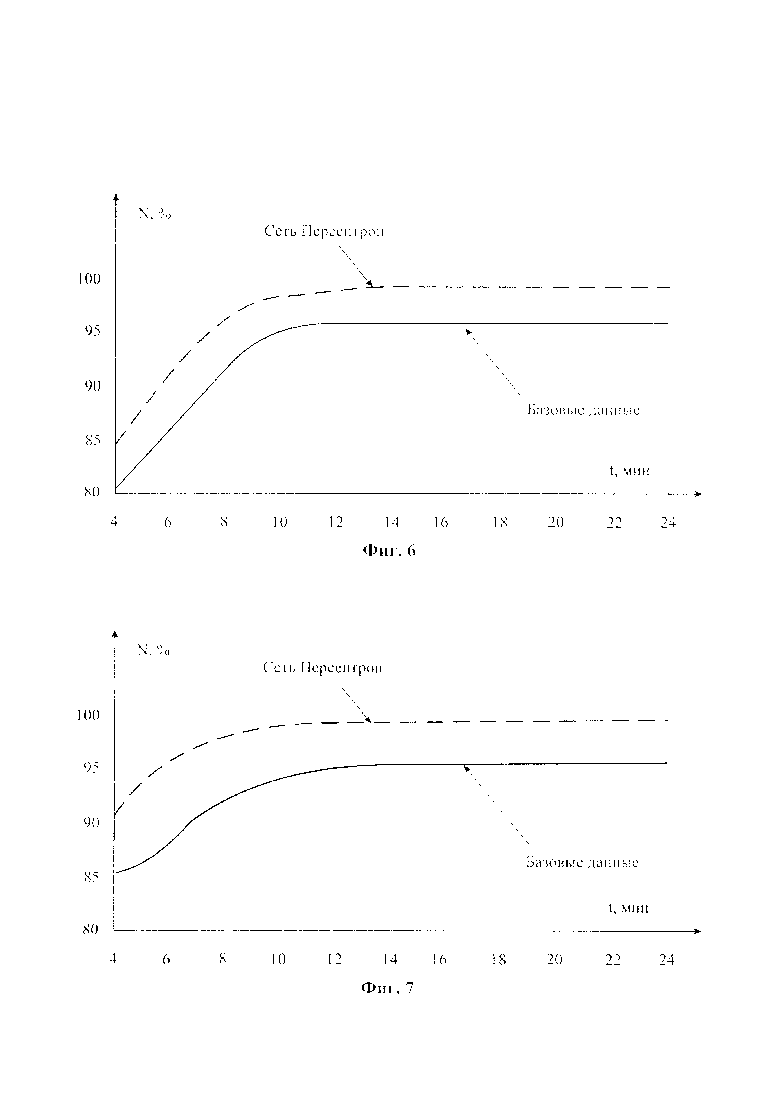
На фиг. 6 и фиг. 7 представлены результаты вычислительного эксперимента по определению коэффициента распознавания (классификации), определяемого как отношение числа распознанных объектов к общему числу испытаний в процентах, для надводных и подводных объектов в условиях зашумления сигнала в диапазоне от -10 до 20 дБ. Как видно из рисунков, распознавание морских целей с помощью вычислительных операций сети персептрон позволяет повысить вероятность классификации как надводных, так и подводных целей на 5-7%.
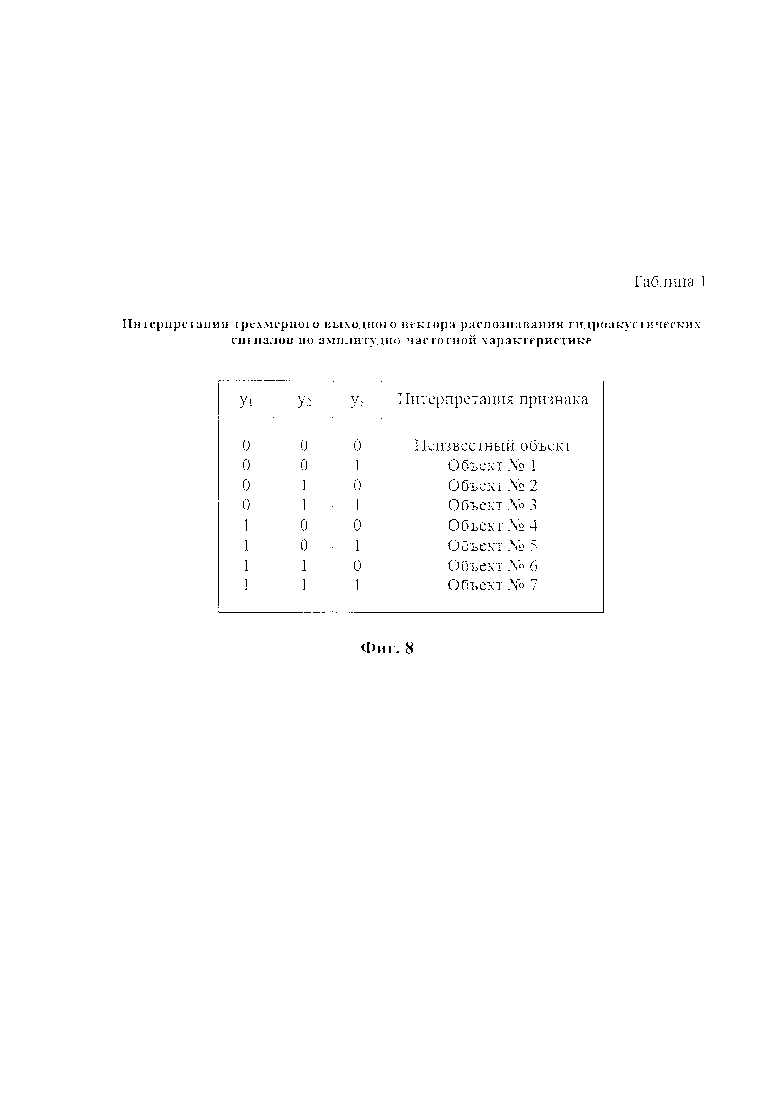
На фиг. 8 приведена таблица интерпретации элементов выходного вектора распознавания гидроакустических сигналов по амплитудно-частотной характеристике.
Способ формирования системы морского мониторинга с программируемым нейросетевым комплексом управления реализуется следующим образом.
Тракт излучения, а также тракт приема, обработки и регистрации информационных сигналов формируют из существующих радиотехнических средств. В качестве низкочастотного излучателя может использоваться подводный звуковой маяк наведения типа ПЗМ-400.
Как показано на фиг. 1 излучатель 1 и приемный преобразователь 2 размещают в морской среде 3 с учетом закономерностей многолучевого распространения волн, что обеспечивает формирование и эффективное использование пространственно-развитой зоны нелинейного взаимодействия и параметрического преобразования волн накачки волнами объекта 4 (см. Свидетельство о государственной регистрации программы для ЭВМ. Программа имитационного моделирования процесса распространения гидроакустических сигналов; Василенко А.М., Пятакович В.А.; №2017664296 от 20.12.2017; Свидетельство о государственной регистрации программы для ЭВМ. Программно-вычислительный комплекс имитационного моделирования морской информационной ситуации при идентификации целей; Василенко А.М., Пятакович В.А.; №2018612944 от 01.03.2018).
В тракте излучения 6 сигналы накачки морской среды генерируют, усиливают и передают по кабельной линии через блок согласования на вход излучателя 1. Излучатель 1 озвучивает среду сигналами накачки стабилизированной частоты в диапазоне десятки-сотни герц. Накачка контролируемой морской среды сложными частотно- или фазово-модулированными сигналами обеспечивает повышение эффективности параметрического приема волн акустически слабозаметных объектов.
На различных режимах движения объекты 5 генерируют излучения, приводящие к изменению величины характеристик проводящей жидкости (плотности и (или) температуры и (или) теплоемкости и т.д.), которые в зависимости от их физической сущности модулируют низкочастотные сигналы накачки морской среды. В спектре нелинейно преобразованных волн (информационных волн) появляются низкочастотные и высокочастотные составляющие, как результат модуляции амплитуды и фазы низкочастотной волны накачки излучениями и полями объектов. Являясь неразрывно связанной компонентой просветной волны (волны накачки морской среды) модуляционные составляющие переносятся на большие расстояния и обнаруживаются в блоках тракта приема, обработки и регистрации информационных сигналов 7.
Сигналы с приемного преобразователя 2 передают по кабельной линии в тракт приема обработки и регистрации информационных сигналов 7, где сигналы усиливают (блок 7.1), переносят их частотно-временной масштаб в высокочастотную область (блок 7.2), проводят узкополосный спектральный анализ (блок 7.3) и выделяют из них параметрические составляющие суммарной и разностной частоты, по которым восстанавливают признаки проявления полей, генерируемых объектом.
Операция преобразования частотно-временного масштаба сигнала в блоке 7.2 обеспечивает увеличение концентрации энергии нелинейно преобразованных сигналов и эффективность выделения из них признаков полей, генерируемых морскими целями.
Операции спектрального анализа в блоке 7.3 позволяют выделять дискретные составляющие суммарной или разностной частоты в узкополосных спектрах нелинейно преобразованных сигналов, по которым восстанавливают характеристики волн объекта 5.
Далее амплитудно-частотные характеристики сигналов объекта передают на вход рекордера 7.4, а также на вход фильтра 9.1 блока предварительной обработки 9 нейросетевого комплекса управления 8. Дискретные составляющие выходного сигнала спектроанализатора 7.3 фильтруют в соответствии с заданным для нейронной сети диапазоном частот, что сокращает время, затрачиваемое на работу и процесс обучения нейронной сети. Параметры фильтра 9.1 были выбраны исходя из анализа записей акустических сигналов типовых целей, полученных при натурных испытаниях.
Выходной сигнал фильтра 9.1 передают на вход блока подготовки данных 9.2, в котором для прореженного набора дискретных составляющих, как входного информационного массива распознающей сети, содержащего признаки, подлежащие категоризации, вычисляют статистические параметры объекта, а также производят их сжатие по методу Колмогорова - Хинчина.
Сигнал с выхода блока подготовки данных 9.2 передаются на первый вход категоризатора типа цели 10.1 модуля нейросетевого распознавания 10.
На второй вход категоризатора типа цели 10.1 поступают данные с блока обучения 10.2, в память которого записаны математически обработанные образы спектрограмм морских целей, априори полученные шумовые портреты вероятных объектов распознавания (см. Свидетельство о государственной регистрации программы для ЭВМ. Моделирование процесса изменения параметров гидроакустических сигналов для управляемого обучения интеллектуальной системы классификации морских целей; Василенко А.М., Пятакович В.А., Алексеев О.А., №2018613557 от 16.03.2018).
Решение о классификации обнаруженной цели (надводный или подводный объект) принимается обученной искусственной нейронной сетью по степени принадлежности исследуемой области спектра объекту классификации (см. Свидетельство о государственной регистрации программы для ЭВМ. Специализированный нейросетевой пакет для решения задач распознавания морских целей; Василенко А.М., Пятакович В.А., №2018619799 от 13.08.2018; Свидетельство о государственной регистрации программы для ЭВМ. Специализированный нейросетевой комплекс классификации зашумленных сигналов морских целей; Пятакович В.А., Василенко А.М., №2018619739 от 10.08.2018).
Анализ низкочастотной, среднечастотной и высокочастотной составляющих амплитудно-частотной характеристики производят раздельно, так как генеральные признаки для различных типов объектов могут находиться в различных частотных диапазонах. Как показано на фиг. 5, на каждый нейрон первого слоя через синапсы с весами {Tij(1)}, i = 1, 2, 3; j = 1, 2, 3 подаются все компоненты входного вектора 
Искусственную нейронную сеть категоризатора типа цели 10.1 настраивают по классификационным признакам целей, запускают вычислительные операции, по результатам которых корректируют весовые коэффициенты распознающей сети и формируют вывод о степени принадлежности анализируемой области спектра объекту идентификации. Искусственная нейронная сеть блока 10.1 выполняет операцию распознавания для семи объектов и выделяет один неизвестный класс, что в перспективе значительно расширит круг распознаваемых морских технических объектов.
Настройка весовых коэффициентов распознающей сети определяется алгоритмом обратного распространения ошибки, основная идея которого состоит в распространении сигналов ошибки от выходов сети к её входам, в направлении, обратном прямому распространению сигналов в обычном режиме работы. Для возможности применения метода обратного распространения ошибки необходимо, чтобы передаточная функция нейронов была дифференцируема.
Сигнал по типу цели, сформированный выходным слоем распознающей нейронной сети, передают в блок управления 11, через который формируют и передают команду генератору сигналов накачки стабилизированной частоты 6.1 тракта излучения 6, что позволяет генерировать сигналы накачки морской среды в соответствии с задачами и условиями длительного морского мониторинга.
Таким образом техническим результатом предлагаемого изобретения является обеспечение дальнего параметрического приема волн в звуковом и инфразвуковом диапазонах частот с корректировкой процесса генерации излучаемых сигналов накачки среды в соответствии с задачами и условиями длительного морского мониторинга, а также распознавание (классификация) обнаруженных объектов на основе вычислительных операций искусственных нейронных сетей с применением предварительного сжатия информации об объекте и пополняемых библиотеках математически обработанных образов спектрограмм целей, что сократит время, затрачиваемое на работу и процесс обучения искусственной нейронной сети и повысит оперативность нейросетевого распознавания (классификации) цели.
Способ формирования системы морского мониторинга с программируемым нейросетевым комплексом управления промышленно применим, так как для его реализации используются распространенные компоненты и изделия радиотехнической промышленности и вычислительной техники.
Изобретение относится к гидроакустике и может быть использовано для построения системы морского мониторинга, работой которой управляет программируемый нейросетевой комплекс. Предлагаемый способ реализуется на основе вычислительных операций искусственных нейронных сетей, средствах морского приборостроения и технологии дальнего параметрического приема волн в звуковом и инфразвуковом диапазонах частот. Применение вычислительных операций искусственных нейронных сетей с предварительным сжатием информации и пополняемых библиотек математически обработанных образов спектрограмм объектов ускоряет процесс распознавания и повышает вероятность классификации как надводных, так и подводных целей, обнаруженных при дальнем параметрическом приеме. Способ формирования системы морского мониторинга с программируемым нейросетевым комплексом управления, заключающийся в том, что сначала в морской среде формируют зону нелинейного взаимодействия и параметрического преобразования волн накачки волнами объекта посредством излучения в нее низкочастотного акустического сигнала, для чего излучатель и приемный преобразователь размещают на противоположных границах контролируемого участка морской среды. Волны накачки, промодулированные волнами объекта, принимают и усиливают в полосе параметрического преобразования, переносят их частотно-временной масштаб в высокочастотную область, проводят узкополосный спектральный анализ, выделяют параметрические составляющие суммарной или разностной частоты, по которым с учетом временного и параметрического преобразования волн восстанавливают характеристики сигналов объекта. Принципиальным отличием от прототипа является то, что амплитудно-частотные характеристики сигналов объекта, полученные с помощью узкополосного спектрального анализа в тракте приема, обработки и регистрации сигналов, подают в дополнительно введенный нейросетевой комплекс управления на вход фильтра блока предварительной обработки. Фильтрацию дискретных составляющих осуществляют в соответствии с заданным для нейронной сети диапазоном частот, затем прореженный набор дискретных составляющих подают на вход блока подготовки данных блока предварительной обработки, где вычисляют статистические параметры объекта и сжимают их по методу Колмогорова - Хинчина. Далее на первый вход категоризатора типа цели модуля нейросетевого распознавания поступают данные с выхода блока подготовки данных блока предварительной обработки, а на второй его вход поступают данные с блока обучения модуля нейросетевого распознавания, в память которого записаны математически обработанные образы спектрограмм морских целей. После чего искусственную нейронную сеть категоризатора типа цели настраивают по классификационным признакам целей, запускают вычислительные операции, по результатам которых корректируют её весовые коэффициенты и формируют вывод о степени принадлежности анализируемой области спектра объекту классификации (надводный или подводный объект). Далее сигнал передают в блок управления нейросетевого комплекса управления, где формируют и подают команды в тракт излучения на вход генератора сигналов накачки стабилизированной частоты, где генерируют сигналы накачки морской среды в соответствии с задачами и условиями длительного морского мониторинга.
Техническим результатом предлагаемого изобретения является обеспечение дальнего параметрического приема волн в звуковом и инфразвуковом диапазонах частот с корректировкой процесса генерации излучаемых сигналов накачки среды в соответствии с задачами и условиями длительного морского мониторинга, а также распознавание (классификация) обнаруженных объектов на основе вычислительных операций искусственных нейронных сетей с применением предварительного сжатия информации об объекте и пополняемых библиотеках математически обработанных образов спектрограмм целей. 8 ил. 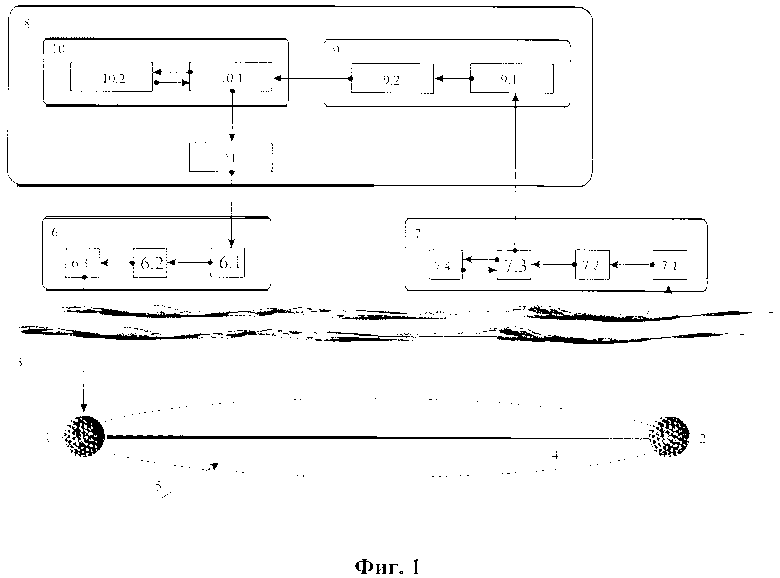
Способ формирования системы морского мониторинга с программируемым нейросетевым комплексом управления, заключающийся в том, что сначала в морской среде формируют зону нелинейного взаимодействия и параметрического преобразования волн накачки волнами объекта посредством излучения в нее низкочастотного акустического сигнала, для чего излучатель и приемный преобразователь размещают на противоположных границах контролируемого участка морской среды, затем волны накачки, промодулированные волнами объекта, принимают и усиливают в полосе параметрического преобразования, переносят их частотно-временной масштаб в высокочастотную область, проводят узкополосный спектральный анализ, выделяют параметрические составляющие суммарной или разностной частоты, по которым с учетом временного и параметрического преобразования волн восстанавливают характеристики сигналов объекта, отличающийся тем, что амплитудно-частотные характеристики сигналов объекта, полученные с помощью узкополосного спектрального анализа в тракте приема, обработки и регистрации сигналов, подают в дополнительно введенный нейросетевой комплекс управления на вход фильтра блока предварительной обработки, где осуществляют фильтрацию дискретных составляющих в соответствии с заданным для нейронной сети диапазоном частот, затем прореженный набор дискретных составляющих подают на вход блока подготовки данных блока предварительной обработки, где вычисляют статистические параметры объекта и сжимают их по методу Колмогорова - Хинчина; далее на первый вход категоризатора типа цели модуля нейросетевого распознавания поступают данные с выхода блока подготовки данных блока предварительной обработки, а на второй его вход поступают данные с блока обучения модуля нейросетевого распознавания, в память которого записаны математически обработанные образы спектрограмм морских целей, после чего искусственную нейронную сеть категоризатора типа цели настраивают по классификационным признакам целей, запускают вычислительные операции, по результатам которых корректируют её весовые коэффициенты и формируют вывод о степени принадлежности анализируемой области спектра объекту классификации (надводный или подводный объект); далее сигнал передают в блок управления нейросетевого комплекса управления, где формируют и подают команды в тракт излучения на вход генератора сигналов накачки стабилизированной частоты, где генерируют сигналы накачки морской среды в соответствии с задачами и условиями длительного морского мониторинга.
| СПОСОБ ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ В МОРСКОЙ СРЕДЕ | 2010 |
|
RU2453930C1 |
| СПОСОБ ПРИЕМА УПРУГОЙ ВОЛНЫ В МОРСКОЙ ВОДЕ (ВАРИАНТЫ) | 1998 |
|
RU2158029C2 |
| СПОСОБ ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ ИСТОЧНИКОВ, ПРОЦЕССОВ И ЯВЛЕНИЙ АТМОСФЕРЫ, ОКЕАНА И ЗЕМНОЙ КОРЫ В МОРСКОЙ СРЕДЕ | 2014 |
|
RU2602763C2 |
| СПОСОБ МОБИЛЬНОГО ПОИСКА МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ И ДОННЫХ ОБЪЕКТОВ, ОБНАРУЖЕНИЯ ПРИЗНАКОВ ЗАРОЖДЕНИЯ ОПАСНЫХ ЯВЛЕНИЙ НА МОРСКОМ ШЕЛЬФЕ | 2015 |
|
RU2601773C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПАРАМЕТРИЧЕСКОЙ АНТЕННЫ В МОРСКОЙ СРЕДЕ | 2014 |
|
RU2550588C1 |

