Изобретение относится к гидроакустике и может быть использовано для построения интеллектуальных автоматизированных систем классификации морских целей, обнаруженных по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объектов.
Принцип работы параметрических антенн основан на использовании естественных нелинейных свойств морской среды (см. Новиков Б.К., Тимошенко В.И. Параметрические антенны в системах гидролокации. - Л.: Судостроение. - 1990. - С. 17-40, 203-225; Мироненко М.В., Малашенко А.Е., Карачун Л.Э., Василенко А.М. Низкочастотный просветный метод дальней гидролокации гидрофизических полей морской среды: монография. - Владивосток: СКБ САМИ ДВО РАН, 2006. - 173 с.; Пятакович В.А., Василенко А.М., Филиппова А.В. Технология создания автоматизированной системы дальнего приема и нейросетевой классификации гидрофизических полей морских акватории. - Известия Тульского государственного университета. Технические науки. Вып. 7. Тула: Изд-во ТулГУ, 2017. - С. 247-258.; Пятакович В.А., Василенко А.М., Рычкова В.Ф. Интеллектуальная система нейросетевой классификации морских целей. - Морские интеллектуальные технологии. - СПб.: 2018. № 2 (40). том 2. - С. 115-120.). При использовании буксируемых за морскими судами многоэлементных параметрических антенн, дополнительно к естественным свойствам среды, используются нелинейные свойства кильватерного следа.
Исследованиями и испытаниями параметрических антенн, использующих высокочастотную накачку морской среды (десятки-сотни кГц) показано, что их недостатками, как измерительных систем, являются малая дальность параметрического приема волн (сотни метров и только в отдельных случаях 1-2 километра) и ограниченная возможность измерения пространственно-временных характеристик сигналов, что особенно проявляется при приеме волн различной физической природы низкого, инфразвукового и дробного диапазонов частот.
Параметрические антенны, работа которых основана на низкочастотной подсветке (накачке) среды слабозатухающими сигналами с частотой десятки-сотни герц, представляют собой сформированные в морской среде протяженные объемные зоны нелинейного взаимодействия и параметрического преобразования сигналов. Что приводит к увеличению дальности параметрического приема волн в десятки-сотни раз, относительно высокочастотных параметрических антенн (см. Мироненко М.В., Малашенко А.Е., Василенко А.М. и др. Нелинейная просветная гидроакустика и средства морского приборостроения в создании Дальневосточной радиогидроакустической системы освещения атмосферы, океана и земной коры, мониторинга их полей различной физической природы: монография. - Владивосток: Изд-во Дальневост. ун-та, 2014. - 404 с.; Малашенко А.Е., Мироненко М.В., Чудаков М.В., Пятакович В.А. Дальний параметрический прием электромагнитных волн, формируемых техническими источниками в морской среде. Датчики и системы - М.: 2016. - №8-9 (206) № 8-9 (206). - С. 14-18.; Мироненко М.В., Василенко А.М., Пятакович В.А. Дальний параметрический прием и классификация морских целей. Морской сборник. - М: 2017. Т. 2048. № 11. - С. 72-75.; Пятакович В.А., Василенко А.М., Рычкова В.Ф. Способ классификации подводных технических объектов экспертной интеллектуальной системой с приемной параметрической антенной. Морские интеллектуальные технологии. - СПб.: 2018. № 2 (40). том 2. - С. 121-126.; Пятакович В.А., Василенко А.М., Рычкова В.Ф. Перспективные методы решения научной проблемы классификации целей нейросетевой экспертной системой при мониторинге морской обстановки. Морские интеллектуальные технологии. - СПб.: 2018. № 4 (42) Том 5. С. 139-148.).
Низкочастотные пространственно-развитые параметрические антенны формируются и функционируют на основе закономерностей многолучевого распространения просветных акустических волн (сигналов накачки морской среды стабилизированной частоты в диапазоне десятки-сотни герц) в протяженном гидроакустическом канале с переменными характеристиками среды и его границ. Дальний параметрический прием информационных волн основан на закономерностях нелинейного взаимодействия и параметрического преобразования излученных просветных волн с волнами, генерируемыми техническими объектами (морскими целями), при их совместном распространении в морской среде. Диапазон частот принимаемых волн составляет десятки-единицы килогерц, сотни-десятки-единицы-доли герц, включая сверхнизкочастотные (СНЧ) колебания движущихся объектов.
Наиболее близкой по технической сущности к заявляемому изобретению является Интеллектуальная система (пат. №2681242 РФ, МПК G01S 15/04, Интеллектуальная система обнаружения и классификации морских целей; опубл. 05.03.2019, бюл. № 7), включающая в себя сформированную в морской среде рабочую зону нелинейного взаимодействия и параметрического преобразования волн накачки и информационных волн, причем длина рабочей зоны равна протяженности контролируемого участка морской среды, для чего излучающий и приемный преобразователи размещены на противоположных границах участка, при этом вход излучающего преобразователя соединен подводным кабелем с выходом тракта излучения сигналов накачки, который содержит последовательно соединенные генератор сигналов накачки стабилизированной частоты, усилитель мощности и блок согласования его выхода с подводным кабелем, а выход приемного преобразователя соединен подводным кабелем с входом тракта приема, обработки и регистрации информационных сигналов, который содержит последовательно соединенные широкополосный усилитель, преобразователь частотно-временного масштаба, спектроанализатор и функционально связанный с ним регистратор, а также тракт нейросетевого распознавания и классификации, содержащий блок распознавания класса цели по амплитудно-частотным характеристикам, охваченный обратной связью с блоком обучения; при этом выход спектроанализатора тракта приема, обработки и регистрации информационных сигналов соединен с входом блока распознавания класса цели по амплитудно-частотным характеристикам тракта нейросетевого распознавания и классификации, на выходе которого формируется сигнал по типу цели согласно степени принадлежности исследуемой области спектра объекту классификации.
Известно, что результатом параметрического преобразования взаимодействующих волн является их взаимная амплитудно-фазовая модуляция. Малое отличие частот (в пределах одного порядка) просветных волн и волн, генерируемых объектом, обеспечивает наиболее интенсивное их взаимодействие. Амплитуда взаимодействующих волн и индекс фазовой модуляции могут быть представлены в следующем виде

 ;
;  ,
,
где γ - коэффициент нелинейности морской среды;  ,
,  - частота волны накачки и полезного сигнала, соответственно;
- частота волны накачки и полезного сигнала, соответственно;  ,
, - затухание волны накачки и полезного сигнала, соответственно;
- затухание волны накачки и полезного сигнала, соответственно;  - объем среды нелинейного взаимодействия и параметрического преобразования волн;
- объем среды нелинейного взаимодействия и параметрического преобразования волн;  - расстояние от точки излучения до точки расположения объекта;
- расстояние от точки излучения до точки расположения объекта;  - плотность,
- плотность,  - скорость звука в морской среде.
- скорость звука в морской среде.
Сформированные в результате преобразования просветных волн параметрические составляющие суммарной и разностной частоты при обработке широкополосных сигналов выделяются как признаки амплитудно-фазовой модуляции, что обосновано математическими зависимостями и подтверждено результатами морских экспериментов (см. Мироненко М.В., Малашенко А.Е., Карачун Л.Э., Василенко А.М. Низкочастотный просветный метод дальней гидролокации гидрофизических полей морской среды: монография. - Владивосток: СКБ САМИ ДВО РАН, 2006. - 173 с.; Пятакович В.А., Василенко А.М., Мироненко М.В.; Технологии нелинейной просветной гидроакустики и нейро-нечетких операций в задачах распознавания морских объектов: - монография. - Владивосток: Дальневост. федерал. ун-т, 2016 190 с. ISBN 978-5-7444-3790-9.; Мироненко М.В., Пятакович В.А., Василенко А.М. Результаты экспериментальных исследований способа определения профиля морского объекта и реализующей его системы. - Мониторинг. Наука и технологии. 2017. - № 2(31) - С. 64-69.).
Спектр взаимодействующих волн состоит из бесконечного числа боковых составляющих, частоту и амплитуду которых можно найти из известного выражения


 ,
,
где  , - результирующее и мгновенное значения давления модулированной волны, соответственно;
, - результирующее и мгновенное значения давления модулированной волны, соответственно;  - удвоенная частота модулированной волны;
- удвоенная частота модулированной волны;  - волна, генерируемая объектом;
- волна, генерируемая объектом;  - время;
- время;  - функции Бесселя n-го порядка;
- функции Бесселя n-го порядка;  - амплитуда модулированной волны;
- амплитуда модулированной волны;  - коэффициент модуляции. Как видно из выражения, значения частот боковых составляющих отличаются от удвоенной центральной частоты 2ω (равной сумме частот взаимодействующих волн) на величину ± n⋅Ω, где n - любое целое число. Амплитуды боковых составляющих для соответствующих частот (2ω± nΩ) определяются величиной множителя
- коэффициент модуляции. Как видно из выражения, значения частот боковых составляющих отличаются от удвоенной центральной частоты 2ω (равной сумме частот взаимодействующих волн) на величину ± n⋅Ω, где n - любое целое число. Амплитуды боковых составляющих для соответствующих частот (2ω± nΩ) определяются величиной множителя  .
.
При малых значениях коэффициента модуляции  спектр взаимодействующих волн приближенно состоит из удвоенной центральной частоты 2ω и ее боковых частот 2ω+Ω и 2ω-Ω.
спектр взаимодействующих волн приближенно состоит из удвоенной центральной частоты 2ω и ее боковых частот 2ω+Ω и 2ω-Ω.
Недостатком системы-прототипа является отсутствие в структурной схеме тракта адаптивной нейро-нечеткой коррекции выбора математических моделей который должен обеспечивать комплексное сокращение размерности данных при автоподстройке базы правил исходя из выборки значений параметров объекта классификации, формирование сигнала с номером продукционного правила и типа функции принадлежности типу цели для оптимизации вычислительных процессов, выполняемых в тракте нейросетевого распознавания и классификации, обеспечивающем конечное классификационное решение по обнаруженным морским целям (надводный или подводный объект), что ограничивает функциональные возможности системы-прототипа.
Задача, на решение которой направлено заявляемое изобретение, заключается в дальнейшей разработке структурной схемы системы-прототипа для ее реализации как системы обнаружения и классификации морских целей с использованием математической модели определения типа цели, которая должна распознавать класс цели по амплитудно-частотным характеристикам сигналов в автоматизированном режиме работы.
Техническим результатом предлагаемого изобретения является автоматизация процесса распознавания классов морских целей (надводный или подводный объект), обнаруженных по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объектов, комплексное сокращение размерности данных при автоподстройке базы правил за счет формирования и редукции выборки эталонных образцов математических моделей морских целей, осуществляемой при помощи тракта адаптивной нейро-нечеткой коррекции, необходимых для реализации конечного процесса классификации в тракте нейросетевого распознавания и классификации, что обеспечивает повышение вероятности правильной классификации морской цели на 5-7% большую, чем при использовании прототипа.
Указанный технический результат достигается путем формирования и редукции выборки эталонных образцов математических моделей морских целей трактом адаптивной нейро-нечеткой коррекции, самостоятельно производящим автоподстройку своей базы правил и ее нейро-нечеткую коррекцию, с применением вычислительных операций адаптивной нейро-нечеткой сети (ANFIS), для оперативно обновляемой библиотеки спектрограмм морских целей блока обучения тракта нейросетевого распознавания и классификации, обеспечивающего конечное классификационное решение по обнаруженным морским целям.
Для решения поставленной задачи система обнаружения и классификации морских целей с использованием математической модели определения типа цели, содержит сформированную в морской среде рабочую зону нелинейного взаимодействия и параметрического преобразования волн накачки и информационных волн, причем длина рабочей зоны равна протяженности контролируемого участка морской среды, для чего излучающий и приемный преобразователи размещены на его противоположных границах, при этом вход излучающего преобразователя соединен подводным кабелем с выходом тракта излучения сигналов накачки, который содержит последовательно соединенные генератор сигналов накачки стабилизированной частоты, усилитель мощности и блок согласования его выхода с подводным кабелем, а выход приемного преобразователя соединен подводным кабелем с входом тракта приема, обработки и регистрации информационных сигналов, который содержит последовательно соединенные широкополосный усилитель, преобразователь частотно-временного масштаба, спектроанализатор и функционально связанный с ним регистратор.
При этом выход спектроанализатора тракта приема, обработки и регистрации информационных сигналов соединен с входом блока распознавания класса цели по амплитудно-частотным характеристикам тракта нейросетевого распознавания и классификации, охваченного обратной связью с блоком обучения тракта нейросетевого распознавания и классификации.
Принципиальным отличием от прототипа является то, что дополнительно введен тракт адаптивной нейро-нечеткой коррекции, содержащий блок продуктивных правил и функций, вход которого соединен с выходом блока обучения тракта нейросетевого распознавания и классификации, а выход соединен с входом адаптера нейро-нечеткой сети, функцию которого выполняет адаптивная нейро-нечеткая сеть (ANFIS), и охваченный обратной связью с дифференциатором, при этом выход адаптера нейро-нечеткой сети соединен с входом дифференциатора, выход которого соединен с входом нечеткого регулятора, самостоятельно производящего автоподстройку своей базы правил, исходя из выборки математических моделей морских целей, на выходе которого формируется сигнал номера нового продукционного правила, а также новый тип функции принадлежности типу цели для блока обучения тракта нейросетевого распознавания и классификации, далее на выходе блока распознавания и классификации цели по амплитудно-частотным характеристикам тракта нейросетевого распознавания и классификации, обеспечивающего конечное классификационное решение по обнаруженным морским целям, формируется сигнал по типу цели согласно степени принадлежности исследуемой области спектра объекту классификации.
Введение тракта адаптивной нейро-нечеткой коррекции обеспечивает комплексное сокращение размерности данных при автоподстройке базы правил исходя из выборки значений параметров объекта классификации, формирование сигнала с номером продукционного правила и типа функции принадлежности типу цели для оптимизации вычислительных процессов, выполняемых в тракте нейросетевого распознавания и классификации, обеспечивающем конечное классификационное решение по обнаруженным морским целям (надводный или подводный объект).
Как известно, извлечение полезной информации из гидроакустических сигналов определяет основы алгоритмизации обработки данных в интеллектуальной системе обнаружения и классификации морских целей. Для формирования вектора признаков, являющегося входным информационным массивом распознающей сети, используется метод масок. Процесс формирования информационных массивов необходим для решения двух задач, первая из которых представляет собой процесс формирования эталонных образцов, необходимых для реализации процесса обучения распознающей сети, и вторая для распознавания целей (см. Пятакович В.А., Богданов В.И., Назаренко П.К. Принцип автоматического распознавания образа цели: материалы Международной конференции «Математическое моделирование физических, экономических, технических, социальных систем и процессов». - Ульяновск: УГУ, 2003.- С. 31, 32; Пятакович В.А., Василенко А.М., Хотинский О.В. Распознавание и классификация источников формирования полей различной физической природы в морской среде: монография. - Владивосток: Мор. гос. ун-т, 2017. - 255 с.; Пятакович В.А., Василенко А.М., Хотинский О.В. Нейросетевые технологии в интеллектуальных системах обнаружения и оперативной идентификации морских целей: монография. - Владивосток: Мор. гос. ун-т, 2018. - 263 с.; Пятакович В.А., Василенко А.М., Пашкеев С.В. Автоматизированная система мониторинга морской среды для решения задач обнаружения технического объекта. - Двойные технологии. - М.: 2018. № 4 (85). - С. 85-88.; Пятакович В.А., Рычкова В.Ф. Параметрическая оптимизация нейросетевой системы классификации морских целей по критерию надежности. - Морские интеллектуальные технологии. - СПб.: 2018. № 4 (42) Том 5. С. 153-162.).
Идея метода состоит в том, что для каждой маски ищется максимальное амплитудное значение, которое и является ортом вектора классификационных признаков. Для автоматизации процесса поиска экстремума в зоне одной маски использовалась сеть поиска максимума MAXNET. Итерации сети завершаются после того, как выходные нейроны сети перестают меняться. Тип элементов входных сигналов - целые или действительные числа, тип элементов выходных сигналов - действительные числа. Размерности входных и выходных сигналов совпадают. Тип активационной функции - линейная с насыщением (используется линейный участок). Число синапсов в сети равно N (N - 1). Формирование синаптических весов происходит согласно формуле
где Wij - i-й синаптический вес j-го нейрона; N - число элементов входного сигнала (количество нейронов в сети).
Функционирование сети задается выражением

где хj - элемент (орт) входного сигнала сети; уi - выход j-го нейрона.
Нормализация входного вектора признаков, полученного после анализа масок сетью MAXNET, производится согласно выражения
Границы диапазона значений  известны и определяются моделью входного гидроакустического сигнала.
известны и определяются моделью входного гидроакустического сигнала.
Обучение распознающей сети производится на основе алгоритма обратного распространения ошибки, реализующего градиентный метод оптимизации функционала вида: где Т - вектор синаптических весов сети; (Х*Y* - обучающие пары;
где Т - вектор синаптических весов сети; (Х*Y* - обучающие пары;  - норма вектора (см. Пятакович В.А., Василенко А.М., Хотинский О.В. Распознавание и классификация источников формирования полей различной физической природы в морской среде: монография. - Владивосток: Морской гос.ун-т им. Г.И. Невельского, 2017. - 255 с.; Пятакович В.А., Василенко А.М. Перспективы и ограничения использования геометрических методов распознавания акустических образов морских объектов применительно к задаче управления нейросетевой экспертной системой. - Фундаментальные исследования. - М: 2017. - № 7. - С. 65-70.; Пятакович В.А., Василенко А.М. Мироненко М.В. Обучение нейронной сети как этап разработки экспертной системы для классификации источников физических полей при мониторинге акваторий. - Вестник Инженерной школы Дальневосточного федерального университета. - Владивосток: Дальневост. федерал. ун-т, 2017. № 3(32). С. 138-149. DOI.org/10.5281/zenodo.897021.; Пятакович В.А. Система классификации морских целей на базе нейросетевых технологий. - Морские интеллектуальные технологии. - СПб.: 2018. № 4 (42) Том 5. С. 169-176.).
- норма вектора (см. Пятакович В.А., Василенко А.М., Хотинский О.В. Распознавание и классификация источников формирования полей различной физической природы в морской среде: монография. - Владивосток: Морской гос.ун-т им. Г.И. Невельского, 2017. - 255 с.; Пятакович В.А., Василенко А.М. Перспективы и ограничения использования геометрических методов распознавания акустических образов морских объектов применительно к задаче управления нейросетевой экспертной системой. - Фундаментальные исследования. - М: 2017. - № 7. - С. 65-70.; Пятакович В.А., Василенко А.М. Мироненко М.В. Обучение нейронной сети как этап разработки экспертной системы для классификации источников физических полей при мониторинге акваторий. - Вестник Инженерной школы Дальневосточного федерального университета. - Владивосток: Дальневост. федерал. ун-т, 2017. № 3(32). С. 138-149. DOI.org/10.5281/zenodo.897021.; Пятакович В.А. Система классификации морских целей на базе нейросетевых технологий. - Морские интеллектуальные технологии. - СПб.: 2018. № 4 (42) Том 5. С. 169-176.).
Для автокоррекции и регулирования алгоритма обратного распространения ошибки при обучении распознающей сети используется тракт адаптивной нейро-нечеткой коррекции, сочетающий в себе адаптивные подходы самообучения и опыт эксперта, что при наличии неопределенных параметрических возмущений, позволяет оперативно осуществлять коррекцию значений, соответствующих новым условиям классификации морской цели.
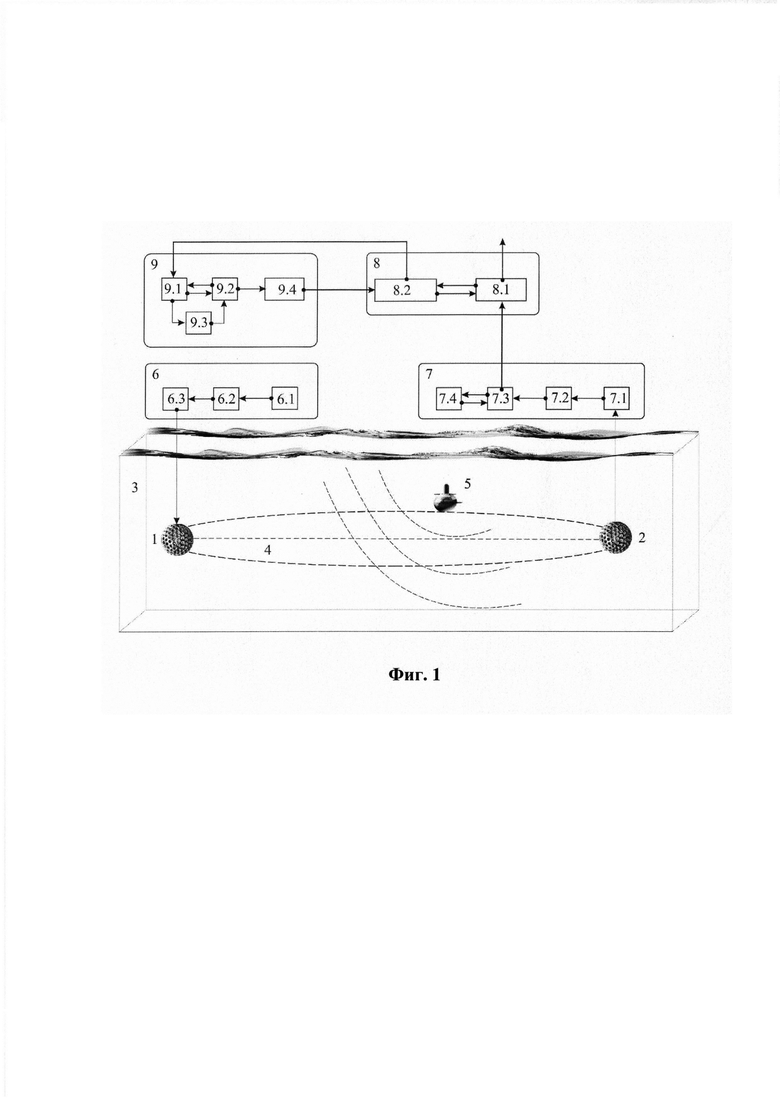
Изобретение поясняется чертежами, где на фиг. 1 показана функциональная схема системы обнаружения и классификации морских целей с использованием математической модели определения типа цели, содержащая следующие элементы:
1. Излучающий преобразователь (подводный звуковой маяк марки ПЗМ-400 излучающий сигналы на частоте около 400 Гц).
2. Приемный преобразователь.
3. Морская среда.
4. Рабочая зона нелинейного взаимодействия и параметрического преобразования волн накачки и информационных волн.
5. Объекты (морские цели, генерирующие акустические, электромагнитные и гидродинамические излучения).
6. Тракт излучения сигналов накачки.
6.1. Генератор сигналов накачки стабилизированной частоты.
6.2. Усилитель мощности.
6.3. Блок согласования.
7. Тракт приема, обработки и регистрации информационных сигналов.
7.1. Широкополосный усилитель.
7.2. Преобразователь частотно-временного масштаба.
7.3. Спектроанализатор.
7.4. Регистратор.
8. Тракт нейросетевого распознавания и классификации.
8.1. Блок распознавания класса цели по амплитудно-частотным характеристикам.
8.2. Блок обучения.
9. Тракт адаптивной нейро-нечеткой коррекции.
9.1. Блок продуктивных правил и функций.
9.2. Дифференциатор.
9.3. Адаптер нейро-нечеткой сети.
9.4. Нечеткий регулятор.
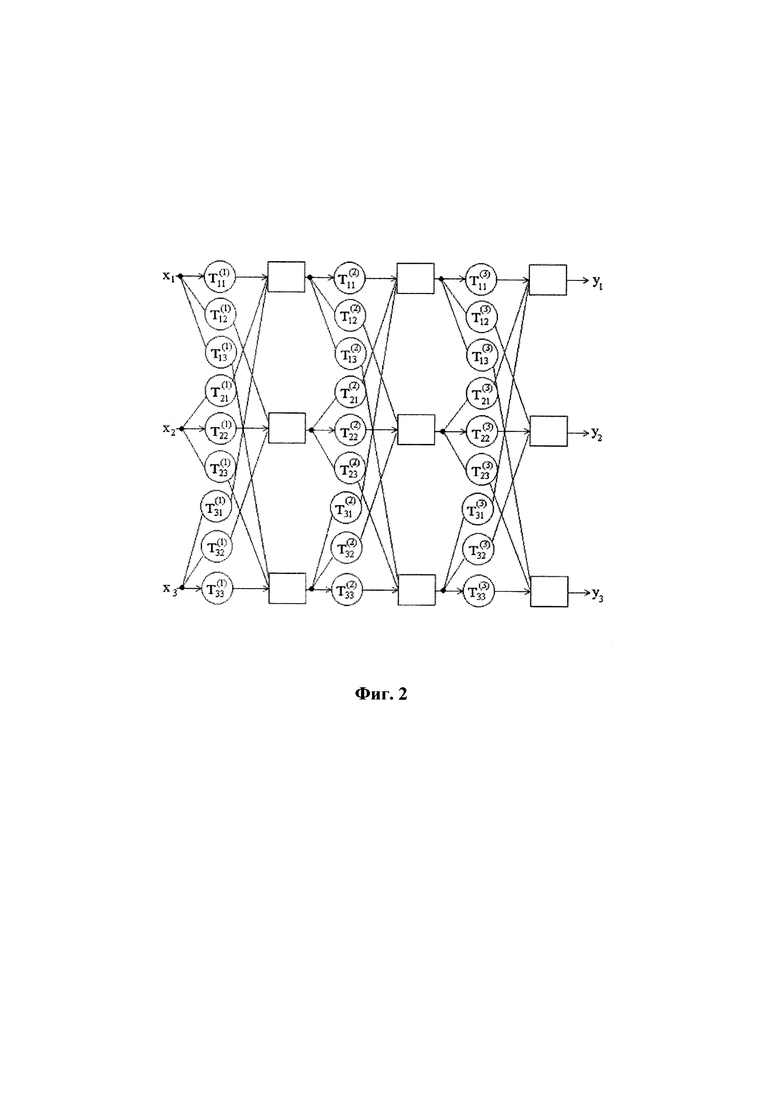
Общая структура распознающей сети представлена на фиг. 2.
На каждый нейрон первого слоя через синапсы с весами {Tij(1)}, i = 1, 2, 3; j = 1, 2, 3, подаются все компоненты входного вектора  Число нейронов во втором (скрытом) слое определяется взаимным расположением и формой разделяемых множеств.
Число нейронов во втором (скрытом) слое определяется взаимным расположением и формой разделяемых множеств.
На каждый нейрон второго слоя через синапсы с весами {Tij(2)}, i = 1, 2, 3; j = 1, 2, 3, подаются выходные сигналы первого слоя. Число нейронов третьего (выходного) слоя определяется числом рассматриваемых классов, подлежащих распознаванию.
На каждый нейрон третьего слоя через синапсы с весами {Tij(3)}, i = 1, 2, 3; j = 1, 2, 3, подаются выходные сигналы второго слоя. Значения выходных сигналов третьего слоя образуют вектор  решений. Нейроны, составляющие сеть, одинаковы и имеют функцию активации известного типа
решений. Нейроны, составляющие сеть, одинаковы и имеют функцию активации известного типа
где х2n(i), yn(i) и In(i) - значения r-го входного сигнала, выходного сигнала и внешнего смещения n-го нейрона i-го слоя; Ni - число нейронов в i-м слое; i = 1, 2, 3.
Предварительная обработка входных векторов производится нормализацией входного вектора признаков, полученного после анализа масок сетью MAXNET или после получения статистических оценок согласно выражения
Границы диапазона значений известны и определяются моделью входного гидроакустического сигнала.
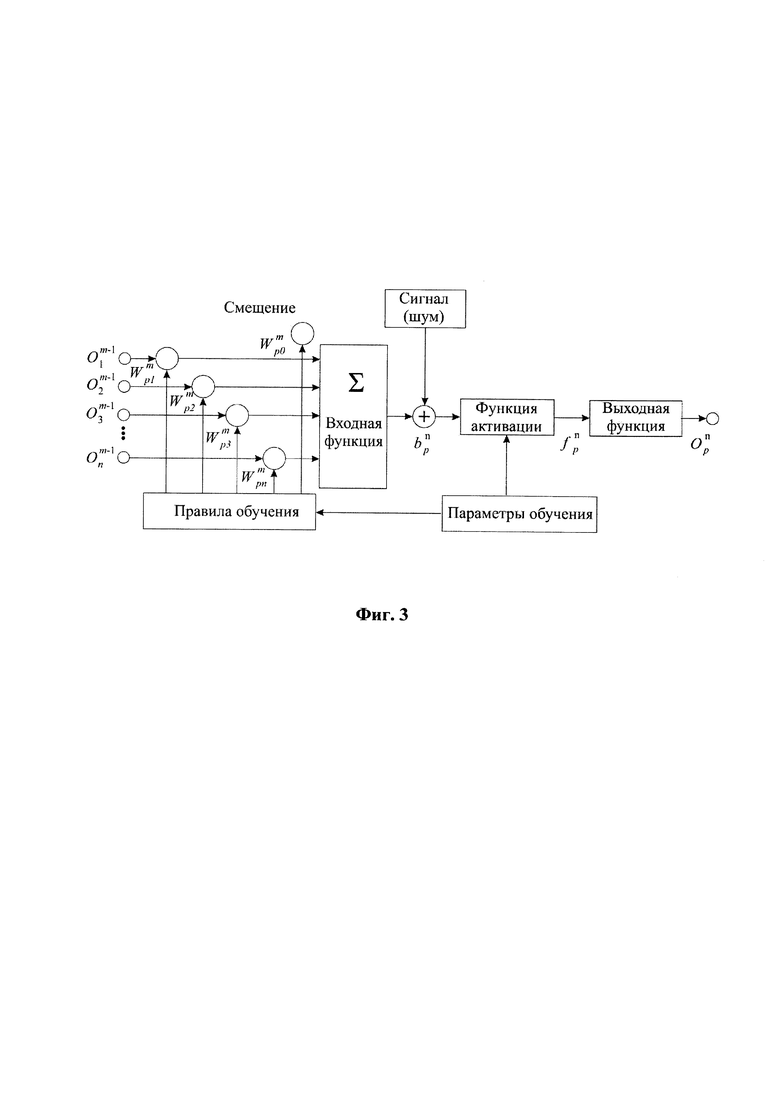
На фиг. 3 представлена обобщенная структура отдельного нейрона сети, иллюстрирующая промежуточный нейрон, получающий входные сигналы с выходов других нейронов.
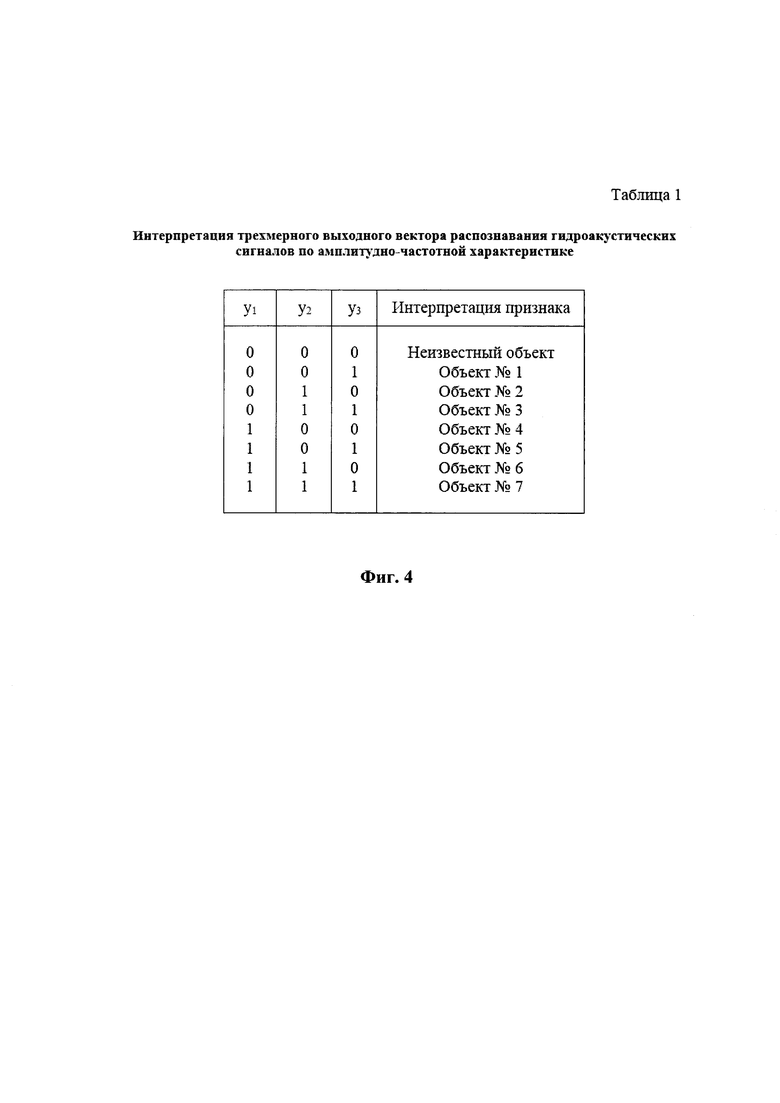
На фиг. 4 приведена таблица интерпретации трехмерного выходного вектора распознавания гидроакустических сигналов по амплитудно-частотной характеристике.
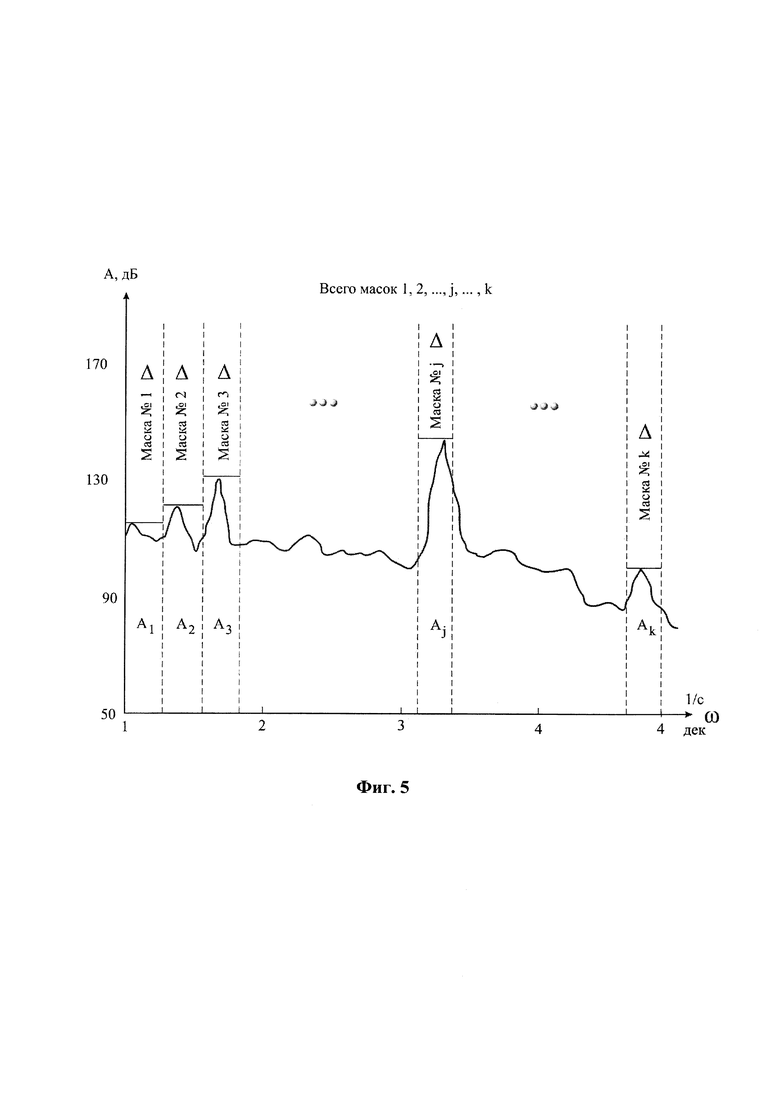
На фиг. 5 представлен метод масок, используемый для распознавания по амплитудно-частотной характеристике.
В каждой маске по реальной характеристике определяется максимальное амплитудное значение сигнала А1, А2, … , Аj, … , Ak. Выбор величины Δ, а, следовательно, и числа масок определяется возможностями распознающей сети (реально 10 ÷ 100). Увеличение числа масок приводит к повышению достоверности входной информации и к повышению сложности (увеличению числа нейронов входного слоя) распознающего устройства, то есть имеет место классический конфликт между качеством и сложностью. Возможен вариант исследования шумового портрета по частям, то есть низкочастотной, среднечастотной и высокочастотной составляющих отдельно.
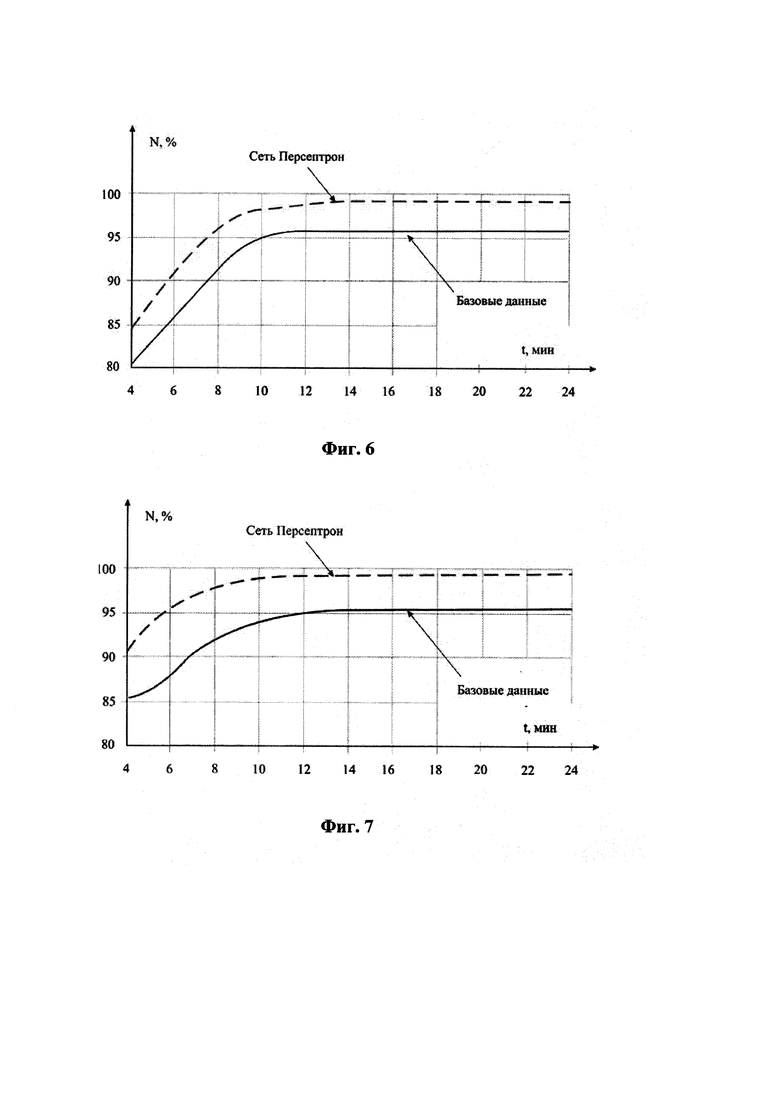
На фиг. 6 и фиг. 7 представлены результаты вычислительного эксперимента по определению коэффициента распознавания (классификации), определяемого как отношение числа распознанных объектов к общему числу испытаний в процентах, для надводных и подводных объектов в условиях зашумления сигнала в диапазоне от -10 до 20 Б. Как видно из рисунков, распознавание и классификация морских целей с помощью вычислительных операций сети персептрон позволяет повысить вероятность классификации как надводных, так и подводных целей на 5-7%.
Система обнаружения и классификации морских целей с использованием математической модели определения типа цели работает следующим образом.
Излучающий преобразователь 1 и приемный преобразователь 2 размещают в морской среде 3 с учетом закономерностей многолучевого распространения волн в протяженном гидроакустическом канале, что обеспечивает формирование и эффективное использование пространственно-развитой рабочей зоны 4 нелинейного взаимодействия и параметрического преобразования просветных волн и волн различной физической природы, генерируемых объектами 5 (см. Свидетельство о государственной регистрации программы для ЭВМ «Расчет лучевой картины» №2016616822 от 21.06.2016.; Свидетельство о государственной регистрации программы для ЭВМ «Программа имитационного моделирования процесса распространения гидроакустических сигналов» №2017664296 от 20.12.2017.; Свидетельство о государственной регистрации программы для ЭВМ «Программно-вычислительный комплекс имитационного моделирования морской информационной ситуации при идентификации целей» №2018612944 от 01.03.2018.; Свидетельство о государственной регистрации программы для ЭВМ «Специализированный нейросетевой комплекс классификации зашумленных сигналов морских целей» № 2018619739 РФ. от. 10.08.2018.; Свидетельство о государственной регистрации программы для ЭВМ «Программа проектирования и обучения искусственных нейронных сетей персептронного типа» № 2019611559 РФ. от. 29.01.2019.).
Сформированный генератором 6.1 сигнал накачки стабилизированной частоты поступает на вход усилителя мощности 6.2, тракта излучения сигналов накачки 6, затем на вход блока согласования 6.3 выход которого соединен с подводным кабелем, соединяющим выход тракта излучения сигналов накачки 6 и вход излучающего преобразователя 1.
Излучающий преобразователь 1 озвучивает среду сигналами накачки стабилизированной частоты в диапазоне десятки-сотни герц.
На различных режимах движения объекты 5 генерируют излучения, приводящие к изменению величины характеристик проводящей жидкости (плотности и (или) температуры и (или) теплоемкости и т.д.), которые в зависимости от их физической сущности модулируют низкочастотные сигналы накачки морской среды. В спектре информационной волны появляются низкочастотные и высокочастотные составляющие, как результат модуляции амплитуды и фазы низкочастотной волны накачки излучениями и полями объектов 5. Являясь неразрывно связанной компонентой просветной волны модуляционные составляющие переносятся на большие расстояния и обнаруживаются в блоках тракта приема, обработки и регистрации информационных сигналов 7.
Сигнал приемного преобразователя 2 по кабельной линии подается на вход широкополосного усилителя 7.1 тракта приема обработки и регистрации информационных сигналов 7. Задачей блоков, входящих в состав тракта приема обработки и регистрации информационных сигналов 7, является измерение признаков проявления информационных волн источников.
Сигнал с выхода широкополосного усилителя 7.1 подается на вход преобразователя частотно-временного масштаба 7.2. Преобразователь частотно-временного масштаба сигнала обеспечивает увеличение концентрации энергии просветных сигналов и эффективность выделения из них признаков полей, формируемых объектами.
Сигнал с выхода преобразователя частотно-временного масштаба 7.2 поступает на вход спектроанализатора 7.3. Задачей спектрального анализа является выделение дискретных составляющих суммарной или разностной частоты в узкополосных спектрах преобразованных информационных сигналов, по которым восстанавливают характеристики волн объектов 5.
Далее сигнал с выхода спектроанализатора 7.3 передается на вход регистратора 7.4 и на вход блока распознавания класса цели по амплитудно-частотным характеристикам 8.1 тракта нейросетевого распознавания и классификации 8. Задача распознавания и классификации надводных и подводных источников гидроакустических сигналов решается с помощью трехслойной нейронной сети, которая распознает семь объектов и позволяет выделить один неизвестный класс, что в перспективе позволит значительно расширить круг распознаваемых морских технических объектов.
Анализ низкочастотной, среднечастотной и высокочастотной составляющих амплитудно-частотной характеристики производится раздельно, так как генеральные признаки для различных типов объектов могут находиться в различных частотных диапазонах.
Как показано на фиг. 2, 3, на каждый нейрон первого слоя через синапсы с весами {Tij(1)}, i = 1, 2, 3; j = 1, 2, 3 подаются все компоненты входного вектора На каждый нейрон второго слоя через синапсы с весами {Tij(2)}, i = 1, 2, 3; j = 1, 2, 3 подаются выходные сигналы первого слоя. На каждый нейрон третьего слоя через синапсы с весами {Tij(3)}, i = 1, 2, 3; j = 1, 2, 3 подаются выходные сигналы второго слоя. Значения выходных сигналов третьего слоя образуют вектор решений элементы которого представлены в табл.1. на фиг. 4.
Набор выходных сигналов блока распознавания класса цели по амплитудно-частотным характеристикам 8.1 поступает в память блока обучения 8.2, где происходит сравнение результатов с математическими образами спектрограмм морских объектов и их коррекция на основе сигналов поступающих от тракта адаптивной нейро-нечеткой коррекции 9, для формирования вывода о степени принадлежности исследуемой области спектра объекту классификации, а настройка весовых коэффициентов распознающей сети определяется алгоритмом обратного распространения ошибки.
Сигнал с выхода блока обучения 8.2 тракта нейросетевого распознавания и классификации 8 поступает в блок продуктивных правил и функций 9.1, тракта адаптивной нейро-нечеткой коррекции 9.
Сигнал с выхода блока продуктивных правил и функций 9.1, охваченного обратной связью с дифференциатором 9.2, поступает на вход адаптера нейро-нечеткой сети 9.3, и далее на дифференциатор 9.2, а затем на вход нечеткого регулятора 9.4, тракта адаптивной нейро-нечеткой коррекции 9, самостоятельно производящего автоподстройку своей базы правил, исходя из выборки математических моделей морских целей, на выходе которого формируется сигнал номера нового продукционного правила, а также новый тип функции принадлежности типу цели для блока обучения 8.2 тракта нейросетевого распознавания и классификации 8, далее на выходе блока распознавания и классификации цели по амплитудно-частотным характеристикам 8.1, тракта нейросетевого распознавания и классификации 8 формируется сигнал по типу цели, согласно степени принадлежности исследуемой области спектра объекту классификации.
Функцию адаптера 9.3 в системе нечеткого управления тракта адаптивной нейро-нечеткой коррекции 9 выполняет адаптивная нейро-нечеткая сеть (ANFIS). В ситуации неопределенности, т.е. влияния случайных внешних и параметрических возмущений, нечеткий регулятор осуществляет их компенсацию в базе правил, а также компенсацию функций принадлежности нового вида (с другими универсумом  и
и  ). Таким образом, адаптер определяет номер правила (N) необходимого для замены в основной базе правил, а также новый тип функции принадлежности для данного правила.
). Таким образом, адаптер определяет номер правила (N) необходимого для замены в основной базе правил, а также новый тип функции принадлежности для данного правила.
Адаптивный нечеткий регулятор 9.4 самостоятельно производит автоподстройку своей базы правил, исходя из выборки образцов математических моделей морских целей, осуществляя формирование и редукцию выборки эталонных образцов математических моделей морских целей и коррекцию данных оперативно обновляемой библиотеки математически обработанных образов спектрограмм морских целей для блока обучения 8.2 тракта нейросетевого распознавания и классификации 8, обеспечивающего конечное классификационное решение по обнаруженным морским целям (надводный или подводный объект).
(см. Свидетельство о государственной регистрации программы для ЭВМ «Специализированный нейросетевой комплекс классификации зашумленных сигналов морских целей» № 2018619739 РФ. от. 10.08.2018.; Свидетельство о государственной регистрации программы для ЭВМ «Программный комплекс моделирования и обучения ИНС» № 2019611455 РФ. от. 28.01.2019.; Свидетельство о государственной регистрации программы для ЭВМ «Программа проектирования и обучения искусственных нейронных сетей персептронного типа» № 2019611559 РФ. от. 29.01.2019.).
Основная задача алгоритма обратного распространения ошибки состоит в распространении сигналов ошибки от выходов сети к ее входам, в направлении, обратном прямому распространению сигналов в обычном режиме работы. Для возможности применения метода обратного распространения ошибки необходимо, чтобы передаточная функция нейронов была дифференцируема.
Алгоритм коррекции значений настроек регулятора тракта адаптивной нейро-нечеткой коррекции, реализован для нахождения номера нечеткого правила вида:
(ЕСЛИ Трi Условиеi И Gj Условиеj TO Nk ʺЗаключениеʺ)


При наличии обучающего множества
 .
.
Для моделирования неизвестного отображения  используется алгоритм нечеткого вывода, применяются предикатные правила: где
используется алгоритм нечеткого вывода, применяются предикатные правила: где  - нечеткие множества описывающие высказывания: «отрицательная», «нулевая», «положительная», «малое», «среднее», «большое» и т.д.
- нечеткие множества описывающие высказывания: «отрицательная», «нулевая», «положительная», «малое», «среднее», «большое» и т.д.  - вещественные числа (номер правила). Степень истинности
- вещественные числа (номер правила). Степень истинности  правила
правила  определяется с помощью операции умножения (Larsen):
определяется с помощью операции умножения (Larsen):
для моделирования логического оператора «И», выход нечеткой системы  определяется методом центра тяжести:
определяется методом центра тяжести:
Функция ошибки для -го предъявленного значения вида:  позволяет использовать градиентный метод для подстройки параметров заданных предикатных правил, а величина корректируется по соотношению:
позволяет использовать градиентный метод для подстройки параметров заданных предикатных правил, а величина корректируется по соотношению:
 , где
, где  - константа, характеризующая скорость обучения сети. Аналогичным образом определяются параметры функции принадлежности.
- константа, характеризующая скорость обучения сети. Аналогичным образом определяются параметры функции принадлежности.
Таким образом, обнаружив цель по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объекта и используя адаптивную нейро-нечеткую коррекцию с комплексным сокращением размерности данных при автоподстройке базы правил за счет формирования и редукции выборки эталонных образцов оперативно обновляемой библиотеки математически обработанных образов спектрограмм морских целей, а также архитектуру распознающей нейронной сети в виде трехслойного персептрона, можно в автоматизированном режиме распознавать класс цели по амплитудно-частотным характеристикам и делать вывод о степени принадлежности исследуемой области спектра объекту классификации (надводный или подводный объект).
Техническим результатом предлагаемого изобретения является автоматизация процесса распознавания классов морских целей (надводный или подводный объект), обнаруженных по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объектов, комплексное сокращение размерности данных при автоподстройке базы правил за счет формирования и редукции выборки эталонных образцов математических моделей морских целей осуществляемой при помощи тракта адаптивной нейро-нечеткой коррекции, необходимых для реализации конечного процесса классификации в тракте нейросетевого распознавания и классификации.
Система обнаружения и классификации морских целей с использованием математической модели определения типа цели промышленно применима, так как для ее создания используются распространенные компоненты и изделия радиотехнической промышленности и вычислительной техники.
Изобретение относится к гидроакустике и может быть использовано для построения интеллектуальных автоматизированных систем классификации морских целей, обнаруженных по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объектов. Система обнаружения и классификации морских целей с использованием математической модели определения типа цели содержит сформированную в морской среде рабочую зону нелинейного взаимодействия и параметрического преобразования волн накачки и информационных волн. Принципиальным отличием от прототипа является то, что дополнительно введен тракт адаптивной нейро-нечеткой коррекции, содержащий блок продуктивных правил и функций, вход которого соединен с выходом блока обучения тракта нейросетевого распознавания и классификации, а выход соединен с входом адаптера нейро-нечеткой сети, функцию которого выполняет адаптивная нейро-нечеткая сеть (ANFIS), и охваченный обратной связью с дифференциатором, при этом выход адаптера нейро-нечеткой сети соединен с входом дифференциатора, выход которого соединен с входом нечеткого регулятора, самостоятельно производящего автоподстройку своей базы правил, исходя из выборки математических моделей морских целей, на выходе которого формируется сигнал номера нового продукционного правила, а также новый тип функции принадлежности типу цели для блока обучения тракта нейросетевого распознавания и классификации, далее на выходе блока распознавания и классификации цели по амплитудно-частотным характеристикам, тракта нейросетевого распознавания и классификации обеспечивающего конечное классификационное решение по обнаруженным морским целям, формируется сигнал по типу цели согласно степени принадлежности исследуемой области спектра объекту классификации. Техническим результатом предлагаемого изобретения является автоматизация процесса распознавания классов морских целей (надводный или подводный объект), обнаруженных по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объектов, комплексное сокращение размерности данных при автоподстройке базы правил за счет формирования и редукции выборки эталонных образцов математических моделей морских целей осуществляемой при помощи тракта адаптивной нейро-нечеткой коррекции, необходимых для реализации конечного процесса классификации в тракте нейросетевого распознавания и классификации, что обеспечивает повышение вероятности правильной классификации морской цели (надводный или подводный объект) на 5-7 %. 7 ил.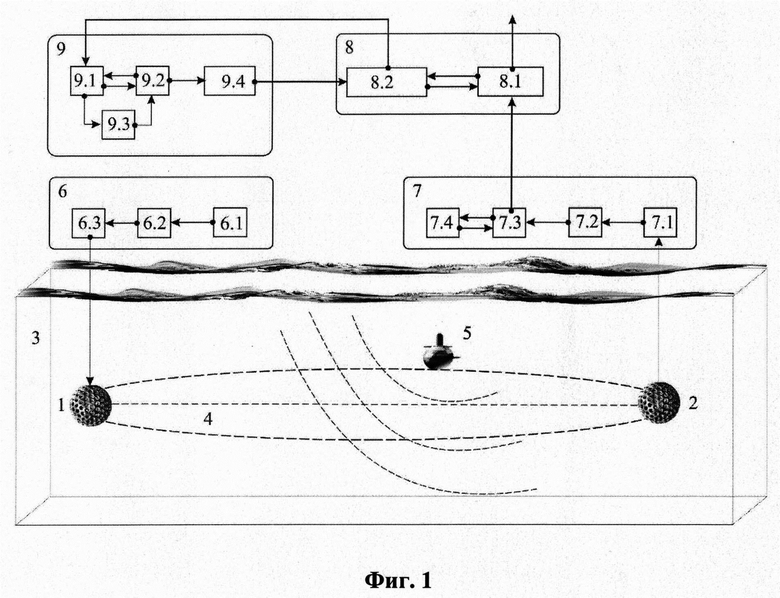
Система обнаружения и классификации морских целей с использованием математической модели определения типа цели, содержащая сформированную в морской среде рабочую зону нелинейного взаимодействия и параметрического преобразования волн накачки и информационных волн, причем длина рабочей зоны равна протяженности контролируемого участка морской среды, для чего излучающий и приемный преобразователи размещены на его противоположных границах, при этом вход излучающего преобразователя соединен подводным кабелем с выходом тракта излучения сигналов накачки, который содержит последовательно соединенные генератор сигналов накачки стабилизированной частоты, усилитель мощности и блок согласования его выхода с подводным кабелем, а выход приемного преобразователя соединен подводным кабелем с входом тракта приема, обработки и регистрации информационных сигналов, который содержит последовательно соединенные широкополосный усилитель, преобразователь частотно-временного масштаба, спектроанализатор и функционально связанный с ним регистратор, при этом выход спектроанализатора тракта приема, обработки и регистрации информационных сигналов соединен с входом блока распознавания класса цели по амплитудно-частотным характеристикам тракта нейросетевого распознавания и классификации, охваченного обратной связью с блоком обучения, отличающаяся тем, что дополнительно введен тракт адаптивной нейро-нечеткой коррекции, содержащий блок продуктивных правил и функций, вход которого соединен с выходом блока обучения тракта нейросетевого распознавания и классификации, а выход соединен с входом адаптера нейро-нечеткой сети, функцию которого выполняет адаптивная нейро-нечеткая сеть (ANFIS), и охваченный обратной связью с дифференциатором, при этом выход адаптера нейро-нечеткой сети соединен с входом дифференциатора, выход которого соединен с входом нечеткого регулятора, самостоятельно производящего автоподстройку своей базы правил, исходя из выборки математических моделей морских целей, на выходе которого формируется сигнал номера нового продукционного правила, а также новый тип функции принадлежности типу цели для блока обучения тракта нейросетевого распознавания и классификации; далее на выходе блока распознавания и классификации цели по амплитудно-частотным характеристикам, тракта нейросетевого распознавания и классификации, обеспечивающего конечное классификационное решение по обнаруженным морским целям, формируется сигнал по типу цели согласно степени принадлежности исследуемой области спектра объекту классификации.

