Изобретение относится к гидроакустике и может быть использовано для построения интеллектуальных автоматизированных систем классификации морских целей, обнаруженных по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объектов.
Принцип работы параметрических антенн основан на использовании естественных нелинейных свойств морской среды (см. Нелинейная гидроакустика в системах мониторинга гидрофизических и геофизических полей морских акваторий : монография / М.В. Мироненко, А.М. Василенко, В.А. Пятакович, [и др.]. - Владивосток : ВУНЦ ВМФ «ВМА» (филиал, г. Владивосток), 2013. - 324 с. - Текст : непосредственный; Технологии нелинейной просветной гидроакустики и нейро-нечетких операций в задачах распознавания морских объектов.: монография / В.А. Пятакович, А.М. Василенко, М.В. Мироненко. - Владивосток : Дальневост. федерал. ун-т, 2016. - 190 с. - ISBN 978-5-7444-3790-9. - Текст : непосредственный.; Распознавание и классификация источников формирования полей различной физической природы в морской среде.: монография / В.А. Пятакович, А.М. Василенко, О.В. Хотинский. - Владивосток : Морской гос. ун-т им. Г. И. Невельского, 2017. - 255 с. - ISBN 978-5-8343-1066-2. - Текст : непосредственный; Параметрическая оптимизация нейросетевой системы классификации морских целей по критерию надежности / В.А. Пятакович, В.Ф. Рычкова. - Текст : непосредственный // Морские интеллектуальные технологии. - Санкт-Петербург : 2018. № 4-5 (42). - С. 153-161.; Комплексный многоуровневый мониторинг морской среды с использованием нейросетевых технологий / В.А. Пятакович, Н.В. Пятакович, С.В. Пашкеев. - Текст : непосредственный // Двойные технологии. - Москва : 2018. № 3 (84). - С. 62-66.; Результаты наблюдения возмущений морской среды, порождаемых синоптическими процессами, низкочастотным просветным методом. / В.А. Пятакович, А.М. Василенко, [и др.]. - Текст : непосредственный // Материалы Международных научных чтений «Приморские зори - 2015». - Владивосток : Дальневост. федерал. ун-т, 2015. - С. 89-92.). При использовании буксируемых за морскими судами многоэлементных параметрических антенн, дополнительно к естественным свойствам среды, используются нелинейные свойства кильватерного следа.
Исследованиями и испытаниями параметрических антенн, использующих высокочастотную накачку морской среды (десятки-сотни кГц) показано, что их недостатками, как измерительных систем, являются малая дальность параметрического приема волн (сотни метров и только в отдельных случаях 1-2 километра) и ограниченная возможность измерения пространственно-временных характеристик сигналов, что особенно проявляется при приеме волн различной физической природы низкого, инфразвукового и дробного диапазонов частот.
Параметрические антенны, работа которых основана на низкочастотной подсветке (накачке) среды слабозатухающими сигналами с частотой десятки-сотни герц, представляют собой сформированные в морской среде протяженные объемные зоны нелинейного взаимодействия и параметрического преобразования сигналов. Что приводит к увеличению дальности параметрического приема волн в десятки-сотни раз, относительно высокочастотных параметрических антенн (см. Нелинейная просветная гидроакустика и средства морского приборостроения в создании Дальневосточной радиогидроакустической системы освещения атмосферы, океана и земной коры, мониторинга их полей различной физической природы. : монография / [М. В. Мироненко и др.]; Российская академия наук, Дальневосточное отделение, Специальное конструкторское бюро средств автоматизации морских исследований. - Владивосток : Изд-во Дальневосточного ун-та, 2014. - 402 с. : ил.; ISBN 978-5-906739-22-3. - Текст : непосредственный.; Нелинейная гидроакустика в системах мониторинга гидрофизических и геофизических полей морских акваторий : монография / М.В. Мироненко, А.М. Василенко, В.А. Пятакович, [и др.]. - Владивосток: ВУНЦ ВМФ «ВМА» (филиал, г. Владивосток), 2013. - 324 с. - Текст : непосредственный; Технологии нелинейной просветной гидроакустики и нейро-нечетких операций в задачах распознавания морских объектов.: монография / В.А. Пятакович, А.М. Василенко, М.В. Мироненко. - Владивосток : Дальневост. федерал. ун-т, 2016. - 190 с. - ISBN 978-5-7444-3790-9. - Текст : непосредственный; Мониторинг характеристик геофизических полей источников морского дна просветной параметрической системой / В.А. Пятакович, М.В. Мироненко, А.М. Василенко, [и др.] - Текст : непосредственный // Материалы Международных научных чтений «Приморские зори - 2015». - Владивосток : Дальневост. федерал. ун-т, 2015. - С. 92-96; Расчет дальности действия гидроакустических средств обнаружения и целеуказания / В.А. Пятакович, А.М. Василенко. - Текст : непосредственный // Проблемы и методы разработки и эксплуатации вооружения и военной техники ВМФ: Сб. статей. - Владивосток : ТОВВМУ, 2018. - Вып. 96. - С. 114-119.).
Низкочастотные пространственно-развитые параметрические антенны формируются и функционируют на основе закономерностей многолучевого распространения просветных акустических волн (сигналов накачки морской среды стабилизированной частоты в диапазоне десятки-сотни герц) в протяженном гидроакустическом канале с переменными характеристиками среды и его границ. Дальний параметрический прием информационных волн основан на закономерностях нелинейного взаимодействия и параметрического преобразования излученных просветных волн с волнами, генерируемыми техническими объектами (морскими целями), при их совместном распространении в морской среде. Диапазон частот принимаемых волн составляет десятки-единицы килогерц, сотни-десятки-единицы-доли герц, включая сверхнизкочастотные (СНЧ) колебания движущихся объектов.
Наиболее близкой по технической сущности к заявляемому изобретению является «Интеллектуальная система обнаружения и классификации морских целей» (Патент № 2681242 C1. Российская Федерация, МПК G01S 15/04 (2006.01). Заявка № 2018118675 : заявл. 21.05.2018 : опубл. 05.03.2019 Бюл. № 7. / Пятакович В.А. - 16 с. : ил. - Текст : непосредственный), включающая в себя сформированную в морской среде рабочую зону нелинейного взаимодействия и параметрического преобразования волн накачки и информационных волн, причем длина рабочей зоны равна протяженности контролируемого участка морской среды, для чего излучающий и приемный преобразователи размещены на противоположных границах участка, при этом вход излучающего преобразователя соединен подводным кабелем с выходом тракта излучения сигналов накачки, который содержит последовательно соединенные генератор сигналов накачки стабилизированной частоты, усилитель мощности и блок согласования его выхода с подводным кабелем, а выход приемного преобразователя соединен подводным кабелем с входом тракта приема, обработки и регистрации информационных сигналов, который содержит последовательно соединенные широкополосный усилитель, преобразователь частотно-временного масштаба, спектроанализатор и функционально связанный с ним регистратор, а также тракт нейросетевого распознавания и классификации, содержащий блок распознавания класса цели по амплитудно-частотным характеристикам, охваченный обратной связью с блоком обучения; при этом выход спектроанализатора тракта приема, обработки и регистрации информационных сигналов соединен с входом блока распознавания класса цели по амплитудно-частотным характеристикам тракта нейросетевого распознавания и классификации, на выходе которого формируется сигнал по типу цели согласно степени принадлежности исследуемой области спектра объекту классификации.
Известно, что результатом параметрического преобразования взаимодействующих волн является их взаимная амплитудно-фазовая модуляция. Малое отличие частот (в пределах одного порядка) просветных волн и волн, генерируемых объектом, обеспечивает наиболее интенсивное их взаимодействие. Амплитуда взаимодействующих волн и индекс фазовой модуляции могут быть представлены в следующем виде:
 ;
;  ,
,
где γ - коэффициент нелинейности морской среды;  ,
,  - частота волны накачки и полезного сигнала, соответственно;
- частота волны накачки и полезного сигнала, соответственно;  ,
, - затухание волны накачки и полезного сигнала, соответственно;
- затухание волны накачки и полезного сигнала, соответственно;  - объем среды нелинейного взаимодействия и параметрического преобразования волн;
- объем среды нелинейного взаимодействия и параметрического преобразования волн;  - расстояние от точки излучения до точки расположения объекта;
- расстояние от точки излучения до точки расположения объекта;  - плотность,
- плотность,  - скорость звука в морской среде.
- скорость звука в морской среде.
Сформированные в результате преобразования просветных волн параметрические составляющие суммарной и разностной частоты при обработке широкополосных сигналов выделяются как признаки амплитудно-фазовой модуляции, что обосновано математическими зависимостями и подтверждено результатами морских экспериментов (см. Нелинейная просветная гидроакустика и средства морского приборостроения в создании Дальневосточной радиогидроакустической системы освещения атмосферы, океана и земной коры, мониторинга их полей различной физической природы. : монография / [М. В. Мироненко и др.]; Российская академия наук, Дальневосточное отделение, Специальное конструкторское бюро средств автоматизации морских исследований. - Владивосток : Изд-во Дальневосточного ун-та, 2014. - 402 с. : ил.; ISBN 978-5-906739-22-3. - Текст : непосредственный.; Низкочастотный просветный метод дальней гидролокации гидрофизических полей морской среды: монография. / Мироненко М.В., Малашенко А.Е., Карачун Л.Э. [и др.]. - Владивосток : СКБ САМИ ДВО РАН, 2006. - 173 с. - Текст : непосредственный; Технологии нелинейной просветной гидроакустики и нейро-нечетких операций в задачах распознавания морских объектов.: монография / В.А. Пятакович, А.М. Василенко, М.В. Мироненко. - Владивосток : Дальневост. федерал. ун-т, 2016. - 190 с. - ISBN 978-5-7444-3790-9. - Текст : непосредственный.; Результаты экспериментальных исследований способа определения профиля морского объекта и реализующей его системыhttps://www.elibrary.ru/item.asp?id=35418699 / М.В. Мироненко, В.А. Пятакович, А.М. Василенко. - Текст : непосредственный // Мониторинг. Наука и технологии : 2017. № 2(31). - С. 64-69.; Оптимальные и адаптивные методы классификации гидроакустических сигналов для морских интеллектуальных систем / В.А. Пятакович, А.Б. Суров, В.Ф. Рычкова. - Текст : непосредственный // Морские интеллектуальные технологии. - Санкт-Петербург : 2020. № 1-2 (47). - С. 186-194.; Расчет эффективности классификации целей интеллектуальной системой ВМФ, использующей комплекс вычислительных операций нейронных сетей. / В.А. Пятакович, В.Ф. Рычкова, Н.В. Пятакович. - Текст : непосредственный // Морские интеллектуальные технологии. - Санкт-Петербург : 2020. № 1 (47) Том 2. - С. 175-185.; Автоматизация обработки информации в интеллектуальной системе морского мониторинга. / В.А. Пятакович, А.В. Николаев, Е.А. Костиков. - Текст : непосредственный // Проблемы машиностроения и автоматизации. - Москва : 2020. № 4. - С. 72-79).
Спектр взаимодействующих волн состоит из бесконечного числа боковых составляющих, частоту и амплитуду которых можно найти из известного выражения:



где  - результирующее и мгновенное значения давления модулированной волны, соответственно;
- результирующее и мгновенное значения давления модулированной волны, соответственно;  - удвоенная частота модулированной волны;
- удвоенная частота модулированной волны;  - волна, генерируемая объектом;
- волна, генерируемая объектом;  - время;
- время;  - функции Бесселя n-го порядка;
- функции Бесселя n-го порядка;  - амплитуда модулированной волны;
- амплитуда модулированной волны;  - коэффициент модуляции. Как видно из выражения, значения частот боковых составляющих отличаются от удвоенной центральной частоты 2ω (равной сумме частот взаимодействующих волн) на величину ± n⋅Ω, где n - любое целое число. Амплитуды боковых составляющих для соответствующих частот (2ω ± n Ω) определяются величиной множителя
- коэффициент модуляции. Как видно из выражения, значения частот боковых составляющих отличаются от удвоенной центральной частоты 2ω (равной сумме частот взаимодействующих волн) на величину ± n⋅Ω, где n - любое целое число. Амплитуды боковых составляющих для соответствующих частот (2ω ± n Ω) определяются величиной множителя  . При малых значениях коэффициента модуляции
. При малых значениях коэффициента модуляции  спектр взаимодействующих волн приближенно состоит из удвоенной центральной частоты 2ω и ее боковых частот 2ω+Ω и 2ω-Ω.
спектр взаимодействующих волн приближенно состоит из удвоенной центральной частоты 2ω и ее боковых частот 2ω+Ω и 2ω-Ω.
Недостатком системы-прототипа является отсутствие в структурной схеме тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков, позволяющего на основе обучающих выборок данных создавать структуру логически прозрачных нейронных и нейро-нечетких сетей, а также настраивать их параметры без оптимизационной подгонки весов, синтезировать нейронные и нейро-нечеткие модели в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков для оптимизации вычислительных процессов, выполняемых в тракте нейросетевого распознавания и классификации, обеспечивающем конечное классификационное решение по обнаруженным морским целям (надводный или подводный объект), что ограничивает функциональные возможности системы-прототипа. Задача, на решение которой направлено заявляемое изобретение, заключается в дальнейшей разработке структурной схемы системы-прототипа для ее реализации как системы обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта, которая должна распознавать класс цели по амплитудно-частотным характеристикам сигналов в автоматизированном режиме работы.
Техническим результатом предлагаемого изобретения является автоматизация процесса распознавания классов морских целей (надводный или подводный объект), обнаруженных по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объектов, с использованием методов, позволяющих на основе обучающих выборок данных создавать структуру нейронных и нейро-нечетких сетей, а также настраивать их параметры без оптимизационной подгонки весов, синтезировать нейронные и нейро-нечеткие модели в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков, осуществляемой при помощи тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков, необходимых для реализации конечного процесса классификации в тракте нейросетевого распознавания и классификации, что обеспечивает повышение вероятности достоверной классификации морской цели на 5-7 % большую, чем при использовании прототипа.
Указанный технический результат достигается путем формирования структуры нейронных и нейро-нечетких сетей, а также настройки их параметров без оптимизационной подгонки весов, синтеза нейронных и нейро-нечетких моделей в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков осуществляемой при помощи тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков, для обновляемой библиотеки спектрограмм морских целей блока обучения тракта нейросетевого распознавания и классификации, обеспечивающего конечное классификационное решение по обнаруженным морским целям.
Для решения поставленной задачи система обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта, содержит сформированную в морской среде рабочую зону нелинейного взаимодействия и параметрического преобразования волн накачки и информационных волн, причем длина рабочей зоны равна протяженности контролируемого участка морской среды, для чего излучающий и приемный преобразователи размещены на его противоположных границах, при этом вход излучающего преобразователя соединен подводным кабелем с выходом тракта излучения сигналов накачки, который содержит последовательно соединенные генератор сигналов накачки стабилизированной частоты, усилитель мощности и блок согласования его выхода с подводным кабелем, а выход приемного преобразователя соединен подводным кабелем с входом тракта приема, обработки и регистрации информационных сигналов, который содержит последовательно соединенные широкополосный усилитель, преобразователь частотно-временного масштаба, спектроанализатор и функционально связанный с ним регистратор.
При этом выход спектроанализатора тракта приема, обработки и регистрации информационных сигналов соединен с входом блока распознавания класса цели по амплитудно-частотным характеристикам тракта нейросетевого распознавания и классификации, охваченного обратной связью с блоком обучения тракта нейросетевого распознавания и классификации.
Принципиальным отличием от прототипа является то, что дополнительно введен тракт синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков, содержащий блок анализа информации о признаках и топологии обучающей выборки, вход которого соединен с выходом блока обучения тракта нейросетевого распознавания и классификации, а выход соединен с входом блока синтеза нейронной сети, охваченного обратной связью с блоком синтеза нейро-нечетких сетей, выход которого соединен с входом логического устройства, функцию которого выполняет шестислойная нейро-нечеткая сеть Ванга-Менделя, где производится синтез нейронных и нейро-нечетких моделей в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков морской цели и формируется нечеткий логический вывод для блока обучения тракта нейросетевого распознавания и классификации обеспечивающего конечное классификационное решение по обнаруженным морским целям, согласно степени принадлежности исследуемой области спектра объекту классификации.
Введение тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков обеспечивает проведение синтеза нейронных и нейро-нечетких моделей в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков морской цели и формирование нечеткого логического вывода для оптимизации вычислительных процессов, выполняемых в тракте нейросетевого распознавания и классификации, обеспечивающем конечное классификационное решение по обнаруженным морским целям (надводный или подводный объект).
Как известно, извлечение полезной информации из гидроакустических сигналов определяет основы алгоритмизации обработки данных в системе оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей. Для формирования вектора признаков, являющегося входным информационным массивом распознающей сети, используется метод масок. Процесс формирования информационных массивов необходим для решения двух задач, первая из которых представляет собой процесс формирования эталонных образцов, необходимых для реализации процесса обучения распознающей сети, и вторая для распознавания целей (см. Распознавание и классификация источников формирования полей различной физической природы в морской среде : монография / В.А. Пятакович, А.М. Василенко, О.В. Хотинский. - Владивосток : Морской гос. ун-т им. Г. И. Невельского, 2017. - 255 с. - ISBN 978-5-8343-1066-2. - Текст : непосредственный.; Нейросетевые технологии в интеллектуальных системах обнаружения и оперативной идентификации морских целей : монография / В.А. Пятакович, А.М. Василенко, О.В. Хотинский. - Владивосток : Морской гос. ун-т им. Г. И. Невельского, 2018. - 263 с. - ISBN 978-5-8343-1083-9. - Текст : непосредственный.; Обучение нейронной сети как этап разработки экспертной системы для классификации источников физических полей при мониторинге акваторий / В.А. Пятакович, А.М. Василенко, М.В. Мироненко. - Текст : непосредственный // Вестник Инженерной школы Дальневосточного федерального университета. - Владивосток : Дальневост. федерал. ун-т, 2017. № 3(32). - С. 138-149. DOI.org/10.5281/zenodo. 897021.; Свидетельство о государственной регистрации базы данных № 2018621040. Российская Федерация. Алгоритмы принятия решений нейроклассификатором в нечетких условиях при распознавании морской цели. Заявка № 2018620642 : заявл. 21.05.2018.: опубл. (зарег.) 10.07.2018. Бюл. № 7. / В.А. Пятакович.; заявитель: В.А. Пятакович.; Обработка гидроакустических сигналов в трактах с параметрической приемной антенной для решения задач классификации источников формирования полей нейросетевой экспертной системой. / В.А. Пятакович, О.В. Хотинский. - Текст : непосредственный // Перспективы развития современной науки: Сб. ст. по материалам Международной научно-практической конференции - Волгоград : ЦПМ, 2017. - С. 32-42.; Свидетельство о государственной регистрации программы для ЭВМ № 2019611559 Российская Федерация. Программа проектирования и обучения искусственных нейронных сетей персептронного типа. Заявка № 2019610135 : заявл. 10.01.2019. : опубл. (зарег.) 29.01.2019. Бюл. № 2. / А.М. Василенко, В.А. Пятакович., О.А. Алексеев.; заявитель: А.М. Василенко, В.А. Пятакович.; Свидетельство о государственной регистрации программы для ЭВМ № 2019611455 Российская Федерация. Программный комплекс моделирования и обучения ИНС Заявка № 2019610187 : заявл. 10.01.2019.: опубл. (зарег.) 28.01.2019. Бюл. № 2 / В.А. Пятакович, А.М. Василенко, Н.В. Пятакович.; заявитель: В.А. Пятакович, А.М. Василенко, Н.В. Пятакович. ).
Идея метода состоит в том, что для каждой маски ищется максимальное амплитудное значение, которое и является ортом вектора классификационных признаков. Для автоматизации процесса поиска экстремума в зоне одной маски использовалась сеть поиска максимума MAXNET. Итерации сети завершаются после того, как выходные нейроны сети перестают меняться. Тип элементов входных сигналов - целые или действительные числа, тип элементов выходных сигналов - действительные числа. Размерности входных и выходных сигналов совпадают. Тип активационной функции - линейная с насыщением (используется линейный участок). Число синапсов в сети равно N (N - 1).
Формирование синаптических весов происходит согласно формуле:
где Wij - i-й синаптический вес j-го нейрона; N - число элементов входного сигнала (количество нейронов в сети). Функционирование сети задается выражением: 
где хj - элемент (орт) входного сигнала сети; уi - выход j-го нейрона.
Нормализация входного вектора признаков, полученного после анализа масок сетью MAXNET, производится согласно выражения 
Границы диапазона значений  известны и определяются моделью входного гидроакустического сигнала. Обучение распознающей сети производится на основе алгоритма обратного распространения ошибки, реализующего градиентный метод оптимизации функционала вида:
известны и определяются моделью входного гидроакустического сигнала. Обучение распознающей сети производится на основе алгоритма обратного распространения ошибки, реализующего градиентный метод оптимизации функционала вида:  где
где  - вектор синаптических весов сети;
- вектор синаптических весов сети;  - обучающие пары;
- обучающие пары;  - норма вектора (см. Распознавание и классификация источников формирования полей различной физической природы в морской среде.: монография / В.А. Пятакович, А.М. Василенко, О.В. Хотинский. - Владивосток : Морской гос. ун-т им. Г. И. Невельского, 2017. - 255 с. - ISBN 978-5-8343-1066-2. - Текст : непосредственный.; Нейросетевые технологии в интеллектуальных системах обнаружения и оперативной идентификации морских целей.: монография / В.А. Пятакович, А.М. Василенко, О.В. Хотинский. - Владивосток : Морской гос. ун-т им. Г. И. Невельского, 2018. - 263 с. - ISBN 978-5-8343-1083-9. - Текст : непосредственный. ).
- норма вектора (см. Распознавание и классификация источников формирования полей различной физической природы в морской среде.: монография / В.А. Пятакович, А.М. Василенко, О.В. Хотинский. - Владивосток : Морской гос. ун-т им. Г. И. Невельского, 2017. - 255 с. - ISBN 978-5-8343-1066-2. - Текст : непосредственный.; Нейросетевые технологии в интеллектуальных системах обнаружения и оперативной идентификации морских целей.: монография / В.А. Пятакович, А.М. Василенко, О.В. Хотинский. - Владивосток : Морской гос. ун-т им. Г. И. Невельского, 2018. - 263 с. - ISBN 978-5-8343-1083-9. - Текст : непосредственный. ).
Для автокоррекции и регулирования алгоритма обратного распространения ошибки при обучении распознающей сети используется тракт синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков, сочетающий в себе адаптивные подходы самообучения и опыт эксперта, что при наличии неопределенных параметрических возмущений, позволяет осуществлять коррекцию значений, соответствующих новым условиям классификации морской цели.
Изобретение поясняется чертежами, где на фиг. 1 показана функциональная схема системы обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта:
1. Излучающий преобразователь (подводный звуковой маяк марки ПЗМ-400 излучающий сигналы на частоте около 400 Гц).
2. Приемный преобразователь.
3. Морская среда.
4. Рабочая зона нелинейного взаимодействия и параметрического преобразования волн накачки и информационных волн.
5. Объекты (морские цели, генерирующие акустические, электромагнитные и гидродинамические излучения).
6. Тракт излучения сигналов накачки.
6.1. Генератор сигналов накачки стабилизированной частоты.
6.2. Усилитель мощности.
6.3. Блок согласования.
7. Тракт приема, обработки и регистрации информационных сигналов.
7.1. Широкополосный усилитель.
7.2. Преобразователь частотно-временного масштаба.
7.3. Спектроанализатор.
7.4. Регистратор.
8. Тракт нейросетевого распознавания и классификации.
8.1. Блок распознавания класса цели по амплитудно-частотным характеристикам.
8.2. Блок обучения.
9. Тракт синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков.
9.1. Блок анализа информации о признаках и топологии обучающей выборки.
9.2. Блок синтеза нейронной сети.
9.3. Блок синтеза нейро-нечетких сетей.
9.4. Логическое устройство.
Общая структура модифицированной комбинированной распознающей сети, тракта нейросетевого распознавания и классификации, состоящая из сетей Кохонена и Гросберга представлена на фиг. 2, нейросетевая интерпретация алгоритма многомерной классификации приведена на фиг. 3, структура нечеткой нейронной сети Ванга-Менделя показана на фиг. 4, структура нейронной сети прямого распространения представлена на фиг. 5, а структура шестислойной нейро-нечеткой сети на фиг. 6.
Метод масок, используемый для распознавания по амплитудно-частотной характеристике представлен на фиг. 7, а интерпретация трехмерного выходного вектора распознавания гидроакустических сигналов по амплитудно-частотной характеристике на фиг. 8, сравнительная характеристика методов классификации морской цели по времени обучения и классификации показана на фиг. 9.
На фиг. 10 и 11 представлены результаты вычислительного эксперимента по определению коэффициента распознавания (классификации).
Для синтеза логически прозрачных нейромоделей в неитеративном режиме необходимо проводить анализ информации о признаках и топологии обучающей выборки, для чего выполняется следующая последовательность шагов.
Шаг 1. Задать обучающую выборку  . Задать пороговое значение
. Задать пороговое значение  ,
,  . Рассчитать логарифмы значений признаков для всех экземпляров и расширить набор признаков
. Рассчитать логарифмы значений признаков для всех экземпляров и расширить набор признаков  :
:  . Шаг 2. Найти минимальные
. Шаг 2. Найти минимальные  и максимальные
и максимальные  значения признаков. Пронормировать значения признаков для
значения признаков. Пронормировать значения признаков для :
:  Шаг 3. Найти коэффициенты, характеризующие устойчивые связи признаков и их логарифмов,
Шаг 3. Найти коэффициенты, характеризующие устойчивые связи признаков и их логарифмов,  . Например, коэффициенты парной корреляции:
. Например, коэффициенты парной корреляции:

Шаг 4. Сгруппировать признаки. Шаг 4.1. Установить количество групп признаков:  . Шаг 4.2. Найти в матрице
. Шаг 4.2. Найти в матрице  элемент с максимальным по модулю значением:
элемент с максимальным по модулю значением:  . Определить знак
. Определить знак  . Шаг 4.3. Если
. Шаг 4.3. Если  , то перейти на шаг 4.5. Шаг 4.4. Если
, то перейти на шаг 4.5. Шаг 4.4. Если  , то выполнить шаги 4.4.1 - 4.4.4. Шаг 4.4.1. Установить:
, то выполнить шаги 4.4.1 - 4.4.4. Шаг 4.4.1. Установить:  . Шаг 4.4.2. Для всех
. Шаг 4.4.2. Для всех  : если
: если  и
и  , то установить:
, то установить:  . Шаг 4.4.3. Установить:
. Шаг 4.4.3. Установить:  . Шаг 4.4.4. Перейти на шаг 4.2. Шаг 4.5. Если
. Шаг 4.4.4. Перейти на шаг 4.2. Шаг 4.5. Если  , тогда принять:
, тогда принять:  , перейти на шаг 4.5, в противном случае - перейти на шаг 4.6. Шаг 4.6. Установить
, перейти на шаг 4.5, в противном случае - перейти на шаг 4.6. Шаг 4.6. Установить  , для всех
, для всех , для которых значение
, для которых значение  не было установлено. Шаг 4.7. Для
не было установлено. Шаг 4.7. Для  , установить:
, установить: 
Шаг 4.8. Для  , установить:
, установить:  . Шаг 5. Найти коэффициенты
. Шаг 5. Найти коэффициенты  , характеризующие тесноту связи признаков и номера класса, такие, что
, характеризующие тесноту связи признаков и номера класса, такие, что  , и с увеличением значения возрастает значимость признака для определения класса. Шаг 6. Выполнить кластер-анализ обучающей выборки: разбить ее на кластеры
, и с увеличением значения возрастает значимость признака для определения класса. Шаг 6. Выполнить кластер-анализ обучающей выборки: разбить ее на кластеры  , где
, где  - количество кластеров, определить координаты центров кластеров
- количество кластеров, определить координаты центров кластеров  . Кластер-анализ можно выполнить, используя методы [2, 12]. Определить четкую принадлежность кластеров к каждому из
. Кластер-анализ можно выполнить, используя методы [2, 12]. Определить четкую принадлежность кластеров к каждому из  классов. Шаг 7. Разбить ось значений каждого признака на интервалов (термов) и определить их параметры для синтеза нейронных и нейро-нечетких сетей. Шаг 7.1. Установить номер текущего признака:
классов. Шаг 7. Разбить ось значений каждого признака на интервалов (термов) и определить их параметры для синтеза нейронных и нейро-нечетких сетей. Шаг 7.1. Установить номер текущего признака:  . Шаг 7.2.
. Шаг 7.2.
Если  , тогда перейти на шаг 7.6, в противном случае - перейти на шаг 7.3. Шаг 7.3.
, тогда перейти на шаг 7.6, в противном случае - перейти на шаг 7.3. Шаг 7.3.
Установить номер текущего интервала значений текущего признака . Шаг 7.4. Если
. Шаг 7.4. Если  , тогда перейти на шаг 7.5, в противном случае - установить для текущего
, тогда перейти на шаг 7.5, в противном случае - установить для текущего  :
: 

Принять:  . Перейти на шаг 7.4. Шаг 7.5. Принять:
. Перейти на шаг 7.4. Шаг 7.5. Принять:  . Перейти на шаг 7.2.
. Перейти на шаг 7.2.
Шаг 7.6. На основе параметров  и
и  определить
определить  и
и  - номера класса и кластера для
- номера класса и кластера для  -го терма,
-го терма,  :
: 

Шаг 8. Задать функции принадлежности распознаваемого экземпляра к нечетким термам. Для этого предлагается использовать трапециевидные функции:
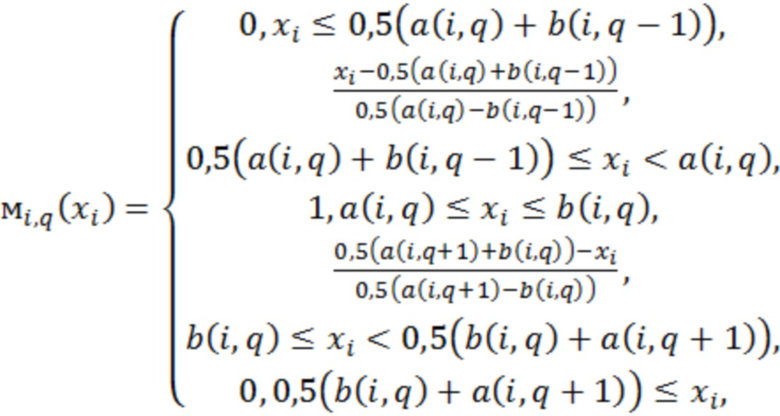
либо П-образные функции:  , где
, где  - функция принадлежности распознаваемого экземпляра по признаку
- функция принадлежности распознаваемого экземпляра по признаку  к -му терму
к -му терму  -го признака,
-го признака,  -
-  -образная функция, а
-образная функция, а  -
-  -образная функция:
-образная функция:
либо треугольные функции:
либо функции Гаусса: 
На основе результатов проведенного анализа информации о признаках по обучающей выборке синтезируется нейронная сеть прямого распространения (фиг. 5). Нейроны первого слоя сети осуществляют нормирование входных сигналов, отображая их в диапазон [0, 1], а также выполняют, где это необходимо, логарифмирование нормированного сигнала.
Нейроны второго слоя группируют преобразованные нейронами первого слоя сигналы и находят взвешенную сумму сигналов группы с учетом оценок их индивидуального влияния на выходной признак (номер класса). Нейроны третьего слоя сети определяют расстояния от распознаваемого экземпляра до центров кластеров в пространстве сгруппированных сигналов и находят значение функции Гаусса, аргументом которой является определенное расстояние. Нейроны четвертого слоя соответствуют классам и выдают на выходе значение «1», если распознаваемый экземпляр относится к соответствующему классу, и «0» - в противном случае.
Дискриминантные функции нейронов сети будут задаваться формулами:




где  - дискриминантная (постсинаптическая, весовая) функция -го нейрона
- дискриминантная (постсинаптическая, весовая) функция -го нейрона  -го слоя,
-го слоя,  - набор весовых коэффициентов -го нейрона -го слоя,
- набор весовых коэффициентов -го нейрона -го слоя,  - весовой коэффициент -го входа -го нейрона -го слоя,
- весовой коэффициент -го входа -го нейрона -го слоя,  - набор входов -го нейрона -го слоя,
- набор входов -го нейрона -го слоя,  - значение на -ом входе -го нейрона -го слоя нейронной сети.
- значение на -ом входе -го нейрона -го слоя нейронной сети.
Функции активации нейронов будут задаваться формулами:


где  - функция активации -го нейрона -го слоя нейросети.
- функция активации -го нейрона -го слоя нейросети.
Весовые коэффициенты нейронов сети рассчитываются по формуле:
Модификация структуры, модифицированной комбинированной распознающей сети, тракта нейросетевого распознавания и классификации представленной на фиг. 2. состоит в добавлении к сети Кохонена и Гросберга сети MAXNET, что весьма важно для решаемой задачи.
На каждый нейрон первого слоя через синапсы с весами  ,
,  ;
;  подаются все компоненты входного вектора
подаются все компоненты входного вектора  Число нейронов во втором (скрытом) слое определяется взаимным расположением и формой разделяемых множеств.
Число нейронов во втором (скрытом) слое определяется взаимным расположением и формой разделяемых множеств.
На каждый нейрон второго слоя через синапсы с весами  ; подаются выходные сигналы первого слоя. Число нейронов третьего (выходного) слоя определяется числом рассматриваемых классов, подлежащих распознаванию.
; подаются выходные сигналы первого слоя. Число нейронов третьего (выходного) слоя определяется числом рассматриваемых классов, подлежащих распознаванию.
На каждый нейрон третьего слоя через синапсы с весами  ; подаются выходные сигналы второго слоя. Значения выходных сигналов третьего слоя образуют вектор
; подаются выходные сигналы второго слоя. Значения выходных сигналов третьего слоя образуют вектор  решений. Нейроны, составляющие сеть, одинаковы и имеют функцию активации известного типа
решений. Нейроны, составляющие сеть, одинаковы и имеют функцию активации известного типа  где
где  ,
,  и
и  - значения
- значения  -го входного сигнала, выходного сигнала и внешнего смещения
-го входного сигнала, выходного сигнала и внешнего смещения  -го нейрона -го слоя;
-го нейрона -го слоя;  - число нейронов в -м слое;
- число нейронов в -м слое; 
Предварительная обработка входных векторов производится нормализацией входного вектора признаков, полученного после анализа масок сетью MAXNET или после получения статистических оценок согласно выражения Границы диапазона значений известны и определяются моделью входного гидроакустического сигнала.
Предварительная обработка данных, один из самых трудозатратных шагов, необходима, чтобы последующие алгоритмы обучения смогли извлечь из выборки максимум знаний.
Процедура архитектурной самонастройки и настройки весовых коэффициентов (синапсов) сети Кохонена включает в себя следующие этапы.
1. Вводится произвольное число нейронов L = L0 со случайным образом нормализованными векторами синапсов, равномерно распределенными на интервале [-1, 1].
2. На слой подается один из обучающих векторов входных сигналов (очевидно, что предварительно обработанный), определяются потенциалы на выходах всех нейронов и номер L*-нейрона «победителя».
3. Определяется угол β* между обучающим вектором признаков и вектором синапсов (весовых коэффициентов) нейрона “победителя”.
4. Если выполнено условие β* < β, то осуществляется настройка синапсов нейрона “победителя” путем усреднения по всем шагам обучения, на которых он оказался нейроном “победителем” и последующей нормализации.
Если β* > β, то в слой директивным порядком вводится L+1 нейрон, синапсом которого (весам связей) присваиваются значения компонентов соответствующего обучающего вектора.
5. Выбирается очередной входной вектор обучающей выборки и повторяются процедуры 2, 3, 4.
Обучение слоя Гросберга является традиционным обучением с учителем и может производиться как одновременно с архитектурной самоорганизацией и настройкой слоя Кохонена по каждому входному вектору выборки, так и автоматно (после обучения слоя Кохонена). Во всех случаях правило обучения можно представить следующим алгоритмом: 
где  -
-  -й компонент желаемого выходного вектора классификатора;
-й компонент желаемого выходного вектора классификатора;  - выходной сигнал j-го нейрона слоя Кохонена, при обучении S-му входному вектору признаков.
- выходной сигнал j-го нейрона слоя Кохонена, при обучении S-му входному вектору признаков.
Функционирование распознающей сети.
Предварительно обработанный вектор входных признаков наблюдаемого объекта {xi} подается на вход сети и распределяется через весовые коэффициенты связей (синапсы)  на нейроны слоя Кохонена. Входные потенциалы нейронов
на нейроны слоя Кохонена. Входные потенциалы нейронов 
После этого слой Кохонена начинает функционировать как конкурирующая сеть с латеральными связями. В результате на выходе слоя формируется вектор с одним единичным компонентом, соответствующим нейрону «победителю» и с нулевыми остальными коэффициентами. Через синапсы  вектор входа поступает на нейроны выходного слоя Гросберга, которые функционируют согласно следующего алгоритма:
вектор входа поступает на нейроны выходного слоя Гросберга, которые функционируют согласно следующего алгоритма:  где 10 ( … ) - функция единичного скачка.
где 10 ( … ) - функция единичного скачка.
На фиг. 3 представлена нейросетевая интерпретация алгоритма многомерной классификации.
Приведенная на фиг. 4 структура нечеткой нейронной сети Ванга-Менделя, формирует нечеткий логический вывод. Нечеткий логический вывод формируется в несколько шагов: введение нечеткости: на этом этапе функции принадлежности применяются к фактическим значениям входных переменных; логический вывод: вычисляется значение истинности для предпосылок каждого правила и применяется к заключениям каждого правила. Это приводит к одному нечеткому подмножеству, которое будет назначено каждой переменной вывода для каждого правила; композиция: нечеткие подмножества, назначенные каждой переменной вывода, объединяют в одно множество для всех переменных вывода; приведение к четкости: используется в случаях, когда необходимо преобразовать нечеткий набор выводов в четкое число.
В первом слое сети выполняется фаззификация входного вектора . Второй слой выполняет агрегирование значений активации условия, используя одну из алгебр:
1)  - конъюнкция Геделя
- конъюнкция Геделя
2)  - конъюнкция Гогена
- конъюнкция Гогена
3)  - конъюнкция Лукасевича (трехзначная логика Я. Лукасевича)
- конъюнкция Лукасевича (трехзначная логика Я. Лукасевича)
В третьем слое заложена нечеткая импликация:
1)  - нечеткая импликация Геделя
- нечеткая импликация Геделя
2)  - нечеткая импликация Гогена
- нечеткая импликация Гогена
3)  - нечеткая импликация Лукасевича
- нечеткая импликация Лукасевича
В четвертом слое осуществляется агрегирование  правил вывода и генерация нормализующего сигнала. Используемые операции:
правил вывода и генерация нормализующего сигнала. Используемые операции:
1)  - дизъюнкция Геделя
- дизъюнкция Геделя
2)  - дизъюнкция Гогена
- дизъюнкция Гогена
3)  - дизъюнкция Лукасевича
- дизъюнкция Лукасевича
Пятый слой состоит из двух выходных нейронов, третий нейрон служит для нормализации, формируя выходные сигналы  и
и  .
.
Выходной сигнал в общем виде определяется выражением, соответствующим следующей зависимости:
 .
.
где  - количество выходов.
- количество выходов.
Вместо операций суммы (Σ), произведения (Π) и ипликации (→) предполагается подставлять соответствующие операции из выбранной нечеткой алгебры.
На фиг. 5 приведена структура нейронной сети прямого распространения. Нейроны первого слоя сети осуществляют нормирование входных сигналов, отображая их в диапазон [0, 1], а также выполняют, где это необходимо, логарифмирование нормированного сигнала.
Нейроны второго слоя группируют преобразованные нейронами первого слоя сигналы и находят взвешенную сумму сигналов группы с учетом оценок их индивидуального влияния на выходной признак (номер класса).
Нейроны третьего слоя сети определяют расстояния от распознаваемого экземпляра до центров кластеров в пространстве сгруппированных сигналов и находят значение функции Гаусса, аргументом которой является определенное расстояние. Нейроны четвертого слоя соответствуют классам и выдают на выходе значение «1», если распознаваемый экземпляр относится к соответствующему классу, и «0» - в противном случае.
На фиг. 6 приведена структура шестислойной нейро-нечеткой сети. Дискриминантные функции нейронов шестислойной нейро-нечеткой сети будут задаваться формулами:



где  - количество нейронов в -ом слое сети.
- количество нейронов в -ом слое сети.
Функции активации нейронов шестислойной нейро-нечеткой сети будут задаваться формулами:



Весовые коэффициенты нейронов шестислойной нейро-нечеткой сети будут определяться по формуле:
Дискриминантные функции нейронов пятислойной нейро-нечеткой сети будут задаваться формулами:


где - количество нейронов в -ом слое сети.
Функции активации нейронов шестислойной нейро-нечеткой сети будут задаваться формулами:


Весовые коэффициенты нейронов шестислойной нейро-нечеткой сети будут определяться по формуле:

Представленный на фиг. 7 метод масок, используется для распознавания по амплитудно-частотной характеристике.
В каждой маске по реальной характеристике определяется максимальное амплитудное значение сигнала А1, А2, … , Аj, … , Ak. Выбор величины Δ, а, следовательно, и числа масок определяется возможностями распознающей сети (реально 10 ÷ 100).
Увеличение числа масок приводит к повышению достоверности входной информации и к повышению сложности (увеличению числа нейронов входного слоя) распознающего устройства, то есть имеет место классический конфликт между качеством и сложностью. Возможен вариант исследования шумового портрета по частям, то есть низкочастотной, среднечастотной и высокочастотной составляющих отдельно.
На фиг. 8 представлена интерпретация трехмерного выходного вектора распознавания гидроакустических сигналов по амплитудно-частотной характеристике. На фиг. 9 представлена сравнительная характеристика методов классификации морской цели по времени обучения и классификации. Наиболее скоростным методом по качеству классификации является модифицированный метод потенциальных функций на основе нейронных сетей (НС) (фиг. 9). НС обладают более сильными аппроксимационными способностями, чем другие методы классификации целей, а алгоритм многомерной классификации, в отличие от методов потенциальных функций, учитывает значимость признаков посредством учета частных значимостей двупризнаковых классификаций.
На фиг. 10 и фиг. 11 представлены результаты вычислительного эксперимента по определению коэффициента распознавания (классификации), определяемого как отношение числа распознанных объектов к общему числу испытаний в процентах, для надводных и подводных объектов в условиях зашумления сигнала в диапазоне от - 10 до 20 дБ. По результатам вычислительного эксперимента, распознавание и классификация МЦ с помощью вычислительных операций шестислойной нейро-нечеткой сети и модифицированной комбинированной распознающей сети, состоящей из сетей Кохонена (конкурирующая сеть) и Гросберга и сети MAXNET, позволяет повысить вероятность достоверной классификации как надводных, так и подводных целей.
Система обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта
Излучающий преобразователь 1 и приемный преобразователь 2 размещают в морской среде 3 с учетом закономерностей многолучевого распространения волн в протяженном гидроакустическом канале, что обеспечивает формирование и эффективное использование пространственно-развитой рабочей зоны 4 нелинейного взаимодействия и параметрического преобразования просветных волн и волн различной физической природы, генерируемых объектами 5 (см. Свидетельство о государственной регистрации программы для ЭВМ № 2018611591. Российская Федерация. Расчет эффективности применения гидроакустических средств и управление имитационной моделью гидроакустического эксперимента. Заявка № 2017662812 : заявл. 05.12.2017 : опубл. (зарег.) 02.02.2018. Бюл. № 2. / А.М. Василенко, В.А. Пятакович.; Свидетельство о государственной регистрации программы для ЭВМ № 2019611559. Российская Федерация. Свидетельство о государственной регистрации программы для ЭВМ № 2018612169. Российская Федерация. Программно-аналитический комплекс определения направления на морскую цель по вторичному гидроакустическому полю. Заявка № 2017663202 : заявл. 19.12.2017.: опубл. (зарег.) 13.02.2018. Бюл. № 2. / А.М. Василенко, В.А. Пятакович.; Свидетельство о государственной регистрации программы для ЭВМ № 2018612944. Российская Федерация. Программно-вычислительный комплекс имитационного моделирования морской информационной ситуации при идентификации целей. Заявка № 2018610256 : заявл. 10.01.2018 : опубл. (зарег.) 01.03.2018. Бюл. № 3 / А.М. Василенко, В.А. Пятакович.).
Сформированный генератором 6.1 сигнал накачки стабилизированной частоты поступает на вход усилителя мощности 6.2, тракта излучения сигналов накачки 6, затем на вход блока согласования 6.3, выход которого соединен с подводным кабелем, соединяющим выход тракта излучения сигналов накачки 6 и вход излучающего преобразователя 1.
Излучающий преобразователь 1 озвучивает среду сигналами накачки стабилизированной частоты в диапазоне десятки-сотни герц.
На различных режимах движения объекты 5 генерируют излучения, приводящие к изменению величины характеристик проводящей жидкости (плотности и (или) температуры и (или) теплоемкости и т.д.), которые в зависимости от их физической сущности модулируют низкочастотные сигналы накачки морской среды. В спектре информационной волны появляются низкочастотные и высокочастотные составляющие, как результат модуляции амплитуды и фазы низкочастотной волны накачки излучениями и полями объектов 5. Являясь неразрывно связанной компонентой просветной волны, модуляционные составляющие переносятся на большие расстояния и обнаруживаются в блоках тракта приема, обработки и регистрации информационных сигналов 7.
Сигнал приемного преобразователя 2 по кабельной линии подается на вход широкополосного усилителя 7.1 тракта приема, обработки и регистрации информационных сигналов 7. Задачей блоков, входящих в состав тракта приема, обработки и регистрации информационных сигналов 7, является измерение признаков проявления информационных волн источников.
Сигнал с выхода широкополосного усилителя 7.1 подается на вход преобразователя частотно-временного масштаба 7.2. Преобразователь частотно-временного масштаба сигнала обеспечивает увеличение концентрации энергии просветных сигналов и эффективность выделения из них признаков полей, формируемых объектами. Сигнал с выхода преобразователя частотно-временного масштаба 7.2 поступает на вход спектроанализатора 7.3. Задачей спектрального анализа является выделение дискретных составляющих суммарной или разностной частоты в узкополосных спектрах преобразованных информационных сигналов, по которым восстанавливают характеристики волн объектов 5.
Далее сигнал с выхода спектроанализатора 7.3 передается на вход регистратора 7.4 и на вход блока распознавания класса цели по амплитудно-частотным характеристикам 8.1, cвязанного обратной связью с блоком обучения 8.2 тракта нейросетевого распознавания и классификации 8.
Сигнал с выхода блока обучения 8.2 тракта нейросетевого распознавания и классификации 8 поступает в блок анализа информации о признаках и топологии обучающей выборки 9.1, и далее на вход блока синтеза нейронной сети 9.2, охваченного обратной связью с блоком синтеза нейро-нечетких сетей 9.3 тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков 9. Сигнал с выхода блока синтеза нейронной сети 9.2, поступает на вход логического устройства 9.4, и далее на вход блока обучения 8.2, охваченного обратной связью с блоком распознавания класса цели по амплитудно-частотным характеристикам 8.1, тракта нейросетевого распознавания и классификации 8, где производится распознавание класса морской цели (надводный или подводный объект).
Задача распознавания и классификации надводных и подводных источников гидроакустических сигналов решается с помощью трехслойной нейронной сети, которая распознает семь объектов и позволяет выделить один неизвестный класс, что в перспективе позволит значительно расширить круг распознаваемых морских технических объектов.
Анализ низкочастотной, среднечастотной и высокочастотной составляющих амплитудно-частотной характеристики производят раздельно, так как генеральные признаки для различных типов объектов могут находиться в различных частотных диапазонах. Как показано на фиг. 2, на каждый нейрон первого слоя через синапсы с весами {Tij(1)}, i = 1, 2, 3; j = 1, 2, 3 подаются все компоненты входного вектора На каждый нейрон второго слоя через синапсы с весами {Tij(2)}, i = 1, 2, 3; j = 1, 2, 3 подаются выходные сигналы первого слоя. На каждый нейрон третьего слоя через синапсы с весами {Tij(3)}, i = 1, 2, 3; j = 1, 2, 3 подаются выходные сигналы второго слоя.
Алгоритм многомерной классификации имеет нейросетевую интерпретацию на основе трехслойного перцептрона, являющегося частным случаем многослойной нейронной сети (МНС) и используется для классификации образов, характеризующихся не очень большим количеством признаков (от 3 до 20), там, где желательно добиться более высокой (в крайнем случае такой же) точности классификации, чем методы потенциальных функций за конечное, заранее известное, количество итераций в процессе обучения, чего нельзя сделать методом нейросетевой классификации.
Применение нейронных сетей для решения задачи классификации по признакам целесообразно, поскольку они обладают высокими адаптивными способностями, способны обучаться аппроксимировать многомерные функции, то есть, могут извлекать, в неявном для пользователя виде, знания из исследуемой предметной области. Процесс обучения МНС является итерационным и, в общем случае, достаточно длительным, поскольку заранее нельзя определить количество итераций, необходимых для обучения НС.
Для нейросетевой реализации сравнения расстояний и определения значения  используется следующее выражение:
используется следующее выражение: 
где  - логистическая функция. Если функция будет дискретной, например, пороговой:
- логистическая функция. Если функция будет дискретной, например, пороговой:  , то
, то  будет принимать значение 0 или 1. Если функция будет вещественной, например, сигмоидной:
будет принимать значение 0 или 1. Если функция будет вещественной, например, сигмоидной:  , то будет принимать значения на интервале [0,1], чем ближе значение этой функции будет к 0, тем ближе экземпляр будет к классу, которому сопоставлено значение 0, и, соответственно, наоборот, чем ближе значение этой функции будет к 1, тем ближе экземпляр будет к классу, которому сопоставлено значение 1. Использование сигмоидной функции может быть более предпочтительным на практике, поскольку она позволяет не только определить к какому классу ближе экземпляр, но и на сколько ближе.
, то будет принимать значения на интервале [0,1], чем ближе значение этой функции будет к 0, тем ближе экземпляр будет к классу, которому сопоставлено значение 0, и, соответственно, наоборот, чем ближе значение этой функции будет к 1, тем ближе экземпляр будет к классу, которому сопоставлено значение 1. Использование сигмоидной функции может быть более предпочтительным на практике, поскольку она позволяет не только определить к какому классу ближе экземпляр, но и на сколько ближе.
Для вычисления разности расстояний  подставляются соответствующие выражения:
подставляются соответствующие выражения:


После математических преобразований получаем:
 где
где 


Выражения для  и
и  вычисляются на основе формального нейрона, имеющего один вход, на который подается значение или
вычисляются на основе формального нейрона, имеющего один вход, на который подается значение или  , вес которого равен
, вес которого равен  или
или  , соответственно. Порог нейрона (нулевой вес) в этом случае будет равен
, соответственно. Порог нейрона (нулевой вес) в этом случае будет равен  или
или  соответственно. Правила вычисления параметров алгоритма многомерной классификации в этом случае останутся неизменными, а параметры и функции активации нейронной сети (НС) необходимо определить на их основе по следующим правилам. Функция активации
соответственно. Правила вычисления параметров алгоритма многомерной классификации в этом случае останутся неизменными, а параметры и функции активации нейронной сети (НС) необходимо определить на их основе по следующим правилам. Функция активации 
 -го нейрона
-го нейрона  -го слоя:
-го слоя:

Весовой коэффициент 
 -го входа -го нейрона -го слоя:
-го входа -го нейрона -го слоя:
Значения выходных сигналов третьего слоя образуют вектор решений . Набор выходных сигналов блока распознавания класса цели по амплитудно-частотным характеристикам 8.1 поступает в память блока обучения 8.2, где происходит сравнение результатов с математическими образами спектрограмм морских объектов и их коррекция на основе сигналов, поступающих от тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков 9, для формирования вывода о степени принадлежности исследуемой области спектра объекту классификации, а настройка весовых коэффициентов распознающей сети определяется алгоритмом обратного распространения ошибки.
Сигнал с выхода блока обучения 8.2 тракта нейросетевого распознавания и классификации 8 поступает в блок анализа информации о признаках и топологии обучающей выборки 9.1, тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков 9. Сигнал с выхода блока анализа информации о признаках и топологии обучающей выборки 9.1, поступает на вход блока синтеза нейронной сети 9.2, охваченного обратной связью с блоком синтеза нейро-нечетких сетей 9.3, а затем на вход логического устройства 9.4, тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков 9, где в автоматическом режиме, на основе обучающих выборок данных формируется структура нейронных и нейро-нечетких сетей, а также настраиваются их параметры, без оптимизационной подгонки весов производится синтез нейронных и нейро-нечетких моделей в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков морской цели, и формируется нечеткий логический вывод для блока обучения 8.2 тракта нейросетевого распознавания и классификации 8, далее на выходе блока распознавания и классификации цели по амплитудно-частотным характеристикам 8.1, тракта нейросетевого распознавания и классификации 8, формируется сигнал по типу цели, согласно степени принадлежности исследуемой области спектра объекту классификации.
Функцию логического устройства 9.4 в системе нечеткого управления тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков 9 выполняет шестислойная нейро-нечеткая сеть Ванга-Менделя. В ситуации неопределенности, т.е. влияния случайных внешних и параметрических возмущений, логическое устройство в автоматическом режиме, на основе обучающих выборок данных формирует структуру нейронных и нейро-нечетких сетей, а также настраивает их параметры, без оптимизационной подгонки весов производит синтез нейронных и нейро-нечетких моделей в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков морской цели и формирует нечеткий логический вывод для выполнения операций распознавания, производимых трактом нейросетевого распознавания и классификации 8.
Алгоритм работы логического устройства тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков.
Этап инициализации. Задать исходную выборку данных  .
.
Этап анализа характеристик выборки. Определить  - соответственно, минимальное и максимальное значения -го признака,
- соответственно, минимальное и максимальное значения -го признака,  . Определить число интервалов для каждого признака:
. Определить число интервалов для каждого признака:  , а также длины интервалов:
, а также длины интервалов:  . Этап расчета обобщенных признаков. Для каждого
. Этап расчета обобщенных признаков. Для каждого  -го экземпляра,
-го экземпляра,  : определить
: определить  - номер интервала значений по каждому -му признаку,
- номер интервала значений по каждому -му признаку,  , в который попадает -й экземпляр
, в который попадает -й экземпляр  рассчитать координату -го экземпляра:
рассчитать координату -го экземпляра:  Это позволяет отобразить исходную выборку на одномерную обобщенную ось
Это позволяет отобразить исходную выборку на одномерную обобщенную ось  (заметим, что при этом произойдет потеря части информации вследствие неявного квантования пространства признаков при преобразовании).
(заметим, что при этом произойдет потеря части информации вследствие неявного квантования пространства признаков при преобразовании).
Этап анализа обобщенной оси. Сформировать набор кортежей  . Упорядочить набор в порядке неубывания значений
. Упорядочить набор в порядке неубывания значений  . Просматривая обобщенную ось в порядке увеличения ее значений, определить граничные значения ее интервалов
. Просматривая обобщенную ось в порядке увеличения ее значений, определить граничные значения ее интервалов  , в которых номер класса
, в которых номер класса  остается неизменным, где
остается неизменным, где  - соответственно левое и правое граничные значения -го интервала обобщенной оси. Обозначим:
- соответственно левое и правое граничные значения -го интервала обобщенной оси. Обозначим:  - номер класса, соответствующий -му интервалу обобщенной оси;
- номер класса, соответствующий -му интервалу обобщенной оси;  - число интервалов обобщенной оси. Этап анализа характеристик интервалов. Для каждого -го интервала обобщенной оси,
- число интервалов обобщенной оси. Этап анализа характеристик интервалов. Для каждого -го интервала обобщенной оси,  , определить
, определить  - число попавших в него экземпляров, а также номера этих экземпляров.
- число попавших в него экземпляров, а также номера этих экземпляров.
Этап формирования обучающей выборки. Среди экземпляров -го интервала включить в обучающую выборку  все экземпляры его класса, находящиеся на одной из границ интервала:
все экземпляры его класса, находящиеся на одной из границ интервала:


его класса, ближайшие к одной из границ интервала:

где  - пороговый коэффициент, регулирующий близость экземпляров к границам интервала (например, можно задать:
- пороговый коэффициент, регулирующий близость экземпляров к границам интервала (например, можно задать:  ); интервалов с малым числом экземпляров:
); интервалов с малым числом экземпляров:

где  - некоторый пороговый коэффициент,
- некоторый пороговый коэффициент,  (например, можно задать:
(например, можно задать:  );
);  - среднее число экземпляров в интервале обобщенной оси.
- среднее число экземпляров в интервале обобщенной оси.
Этап устранения избыточности обучающей выборки. Определить расстояния между всеми экземплярами, вошедшими в сформированную обучающую выборку, сформировав матрицу расстояний  (для упрощения и ускорения вычислений будем оперировать квадратами расстояний):
(для упрощения и ускорения вычислений будем оперировать квадратами расстояний):

Отметим, что 
До тех пор, пока  , необходимо выполнять в цикле действия: найти в матрице расстояний два экземпляра с наименьшим расстоянием между собой
, необходимо выполнять в цикле действия: найти в матрице расстояний два экземпляра с наименьшим расстоянием между собой  если два ближайших экземпляра принадлежат к одному и тому же классу, то оставить в обучающей выборке только тот из них, который находится ближе к экземплярам других классов, а другой исключить из нее
если два ближайших экземпляра принадлежат к одному и тому же классу, то оставить в обучающей выборке только тот из них, который находится ближе к экземплярам других классов, а другой исключить из нее 

 Скорректировать соответствующим образом элементы матрицы , установив:
Скорректировать соответствующим образом элементы матрицы , установив:  если два ближайших экземпляра принадлежат к разным классам, то перейти к выполнению этапа дополнения (уточнения) обучающей выборки.
если два ближайших экземпляра принадлежат к разным классам, то перейти к выполнению этапа дополнения (уточнения) обучающей выборки.
Этап дополнения (уточнения) обучающей выборки. Определить разность исходной и сформированной выборок  Последовательно для каждого
Последовательно для каждого  -го экземпляра
-го экземпляра  выборки
выборки  ,
,  относительно экземпляров сформированной выборки найти расстояние (квадрат расстояния) от него до каждого экземпляра выборки :
относительно экземпляров сформированной выборки найти расстояние (квадрат расстояния) от него до каждого экземпляра выборки :
если ближайший к -му экземпляру экземпляр сформированной выборки принадлежит к другому классу, то включить его в выборку :

В результате выполнения данного метода для исходной выборки  получаем сформированную обучающую выборку , которая будет обладать основными топологическими свойствами исходной выборки. При этом из исходной выборки можно получить также тестовую выборку как разность исходной и сформированной обучающей выборок. Разбиение признакового пространства для выборки эмпирических наблюдений необходимо для определения нечетких термов признаков как проекций соответствующих блоков на координатные оси.
получаем сформированную обучающую выборку , которая будет обладать основными топологическими свойствами исходной выборки. При этом из исходной выборки можно получить также тестовую выборку как разность исходной и сформированной обучающей выборок. Разбиение признакового пространства для выборки эмпирических наблюдений необходимо для определения нечетких термов признаков как проекций соответствующих блоков на координатные оси.
Формирование разбиения признакового пространства необходимо осуществлять путем их выполнения в приведенной ниже последовательности.
Шаг 1. Инициализация. Задать обучающую выборку . Шаг 2. По оси каждого признака  определить одномерные расстояния между экземплярами:
определить одномерные расстояния между экземплярами:  Среди полученных расстояний найти минимальное расстояние, большее нуля:
Среди полученных расстояний найти минимальное расстояние, большее нуля:

Шаг 3. Для каждого признака определить количество интервалов разбиения диапазона его значений:  а также определить длину интервала наблюдаемых значений каждого признака:
а также определить длину интервала наблюдаемых значений каждого признака:

Шаг 4. Разбить ось -го признака на  интервалов. Определить координаты левых и правых границ для каждого -го интервала -го признака по формулам:
интервалов. Определить координаты левых и правых границ для каждого -го интервала -го признака по формулам:

Шаг 5. Сформировать блоки-кластеры и задать номера их классов путем выполнения шагов 5.1 - 5.8. Шаг 5.1. Сформировать прямоугольные блоки  , в -мерном пространстве признаков на пересечении соответствующих интервалов значений признаков. Занести в
, в -мерном пространстве признаков на пересечении соответствующих интервалов значений признаков. Занести в  номер интервала -го признака, который соответствует -му блоку. Шаг 5.2. Определить номера классов для прямоугольных блоков в -мерном пространстве признаков:
номер интервала -го признака, который соответствует -му блоку. Шаг 5.2. Определить номера классов для прямоугольных блоков в -мерном пространстве признаков:
Установить коэффициент уверенности классификации для блоков:
Шаг 5.3. Для тех блоков, у которых 
 , установить:
, установить: 
где  - количество экземпляров -го класса, попавших в -й блок-кластер.
- количество экземпляров -го класса, попавших в -й блок-кластер.
Шаг 5.4. Для тех блоков, у которых номер класса  ,
,  , определить расчетный номер класса, для чего предлагается использовать модифицированный нерекуррентный метод потенциальных функций. Шаг 5.5. Вычислить расстояние между
, определить расчетный номер класса, для чего предлагается использовать модифицированный нерекуррентный метод потенциальных функций. Шаг 5.5. Вычислить расстояние между  -м и -м блоками:
-м и -м блоками:
 , как:
, как:  .
.
Или  где
где  . При этом
. При этом  Шаг 5.6. Определить потенциал, наводимый совокупностью блоков, принадлежащих к -му классу, на -й блок с неизвестной классификацией:
Шаг 5.6. Определить потенциал, наводимый совокупностью блоков, принадлежащих к -му классу, на -й блок с неизвестной классификацией: 

где  - количество блоков, принадлежащих к -му классу, - количество экземпляров обучающей выборки, попавших в -й блок. Шаг 5.7. Установить номер класса для -го блока с неизвестной классификацией
- количество блоков, принадлежащих к -му классу, - количество экземпляров обучающей выборки, попавших в -й блок. Шаг 5.7. Установить номер класса для -го блока с неизвестной классификацией  по формуле:
по формуле:  Шаг 5.8. Модифицировать значения коэффициентов уверенности для блоков:
Шаг 5.8. Модифицировать значения коэффициентов уверенности для блоков:

Шаг 6. Выполнить объединение смежных блоков-кластеров. Выполнить объединение смежных блоков, принадлежащих к одному и тому же классу:
для  : если
: если  ,
, 
и 
тогда объединить блоки и по -му признаку:
- установить: 

- удалить  -й блок:
-й блок:  .
.
Шаг 7. Из объединенного множества (ОМ) выделить подмножество экземпляров, относящихся к блокам-кластерам, номера классов которых не совпадают с номерами классов экземпляров. Применить для полученного разбиения и выделенного подмножества процедуру уточнения разбиения и дообучения модели. Шаг 8. Остановить. Уточнение разбиения и дообучение модели. Если имеется разбиение признакового пространства, которое нужно уточнить (дообучить) на основе новых наблюдений  ,
,  ,
,  ,
,  , ;
, ;  ; то необходимо из набора новых наблюдений исключить те наблюдения, которые попадают в блоки имеющегося разбиения и соответствуют им по номеру класса, скорректировав соответствующим образом
; то необходимо из набора новых наблюдений исключить те наблюдения, которые попадают в блоки имеющегося разбиения и соответствуют им по номеру класса, скорректировав соответствующим образом  . Для тех наблюдений, которые не совпадают с классами блоков, целесообразно сформировать отдельные точечные кластеры.
. Для тех наблюдений, которые не совпадают с классами блоков, целесообразно сформировать отдельные точечные кластеры.
Для каждого нового наблюдения сформировать интервалы по признакам и занести в  , номера интервалов для каждого
, номера интервалов для каждого  -го признака, соответствующие новому кластеру, а также определить:
-го признака, соответствующие новому кластеру, а также определить:


где  - некоторая константа,
- некоторая константа,  Для определения целесообразности применения предложенного метода для конкретной задачи на практике используем нотацию Ландау в так называемом «мягком виде» и оценим сложность этапов предложенного метода. Для этапа инициализации вычислительной сложностью можно пренебречь, а пространственная сложность может быть оценена как
Для определения целесообразности применения предложенного метода для конкретной задачи на практике используем нотацию Ландау в так называемом «мягком виде» и оценим сложность этапов предложенного метода. Для этапа инициализации вычислительной сложностью можно пренебречь, а пространственная сложность может быть оценена как  .
.
Для этапа анализа характеристик выборки вычислительная сложность составит  , а пространственная -
, а пространственная -  . Для этапа расчета обобщенных признаков вычислительная сложность может быть оценена как
. Для этапа расчета обобщенных признаков вычислительная сложность может быть оценена как  , а пространственная -
, а пространственная -  . Для этапа анализа обобщенной оси вычислительная сложность может быть оценена как
. Для этапа анализа обобщенной оси вычислительная сложность может быть оценена как  , а пространственная -
, а пространственная -  . Для этапа анализа характеристик интервалов вычислительная сложность может быть оценена как
. Для этапа анализа характеристик интервалов вычислительная сложность может быть оценена как  , а пространственная -
, а пространственная -  . Для этапа формирования обучающей выборки вычислительная сложность может быть оценена как
. Для этапа формирования обучающей выборки вычислительная сложность может быть оценена как  , а пространственная в виде
, а пространственная в виде  . Для этапа устранения избыточности ОВ вычислительная и пространственная сложность могут быть оценены соответственно как
. Для этапа устранения избыточности ОВ вычислительная и пространственная сложность могут быть оценены соответственно как  .
.
Для этапа дополнения (уточнения) обучающей выборки вычислительная и пространственная сложность оцениваются соответственно как  . Таким образом, общая сложность метода может быть оценена как: вычислительная -
. Таким образом, общая сложность метода может быть оценена как: вычислительная -  ; пространственная -
; пространственная -  .
.
Алгоритм коррекции значений настроек регулятора тракта регулирования параметров формирования и редукции выборок реализован для нахождения номера нечеткого правила вида:
( )
)

 при наличии обучающего множества
при наличии обучающего множества  .
.
Для моделирования неизвестного отображения  используется алгоритм нечеткого вывода, применяются предикатные правила:
используется алгоритм нечеткого вывода, применяются предикатные правила:
 ,
,
где  - нечеткие множества описывающие высказывания: «отрицательная», «нулевая», «положительная», «малое», «среднее», «большое» и т.д.
- нечеткие множества описывающие высказывания: «отрицательная», «нулевая», «положительная», «малое», «среднее», «большое» и т.д.  - вещественные числа (номер правила). Степень истинности
- вещественные числа (номер правила). Степень истинности  правила
правила  - определяется с помощью операции умножения Ларсена (Larsen):
- определяется с помощью операции умножения Ларсена (Larsen):
для моделирования логического оператора «И», выход нечеткой системы  определяется методом центра тяжести:
определяется методом центра тяжести:  Функция ошибки для i-го предъявленного значения вида:
Функция ошибки для i-го предъявленного значения вида:  позволяет использовать градиентный метод для подстройки параметров заданных предикатных правил, а величина корректируется по соотношению:
позволяет использовать градиентный метод для подстройки параметров заданных предикатных правил, а величина корректируется по соотношению:
 .
.
где  - константа, характеризующая скорость обучения сети. Аналогичным образом определяются параметры функции принадлежности.
- константа, характеризующая скорость обучения сети. Аналогичным образом определяются параметры функции принадлежности.
В ситуации неопределенности, т.е. влияния случайных внешних и параметрических возмущений, логическое устройство 9.4 осуществляет их компенсацию в базе правил, а также компенсацию функций принадлежности нового вида (с другими универсумом  и
и  ).
).
Таким образом, тракт синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков позволяет синтезировать нейронные и нейро-нечеткие модели в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков. Логическое устройство 9.4 тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков на основе обучающих выборок данных позволяет создавать структуру нейронных и нейро-нечетких сетей, а также настраивать их параметры без оптимизационной подгонки весов и в автоматическом режиме осуществлять коррекцию данных обновляемой библиотеки математически обработанных образов спектрограмм морских целей тракта нейросетевого распознавания и классификации 8, обеспечивающего конечное классификационное решение по обнаруженным морским целям (надводный или подводный объект). Поскольку базы нечетких правил часто характеризуются большим объемом, то наиболее актуальной является задача объединения и преобразования нечетких правил, суть которой заключается в том, чтобы на основе начального набора нечетких правил сформировать новую базу правил меньшего объема, которая в достаточной мере представляла бы начальную базу и была бы менее избыточной.
Для решения задачи формирования нечетких правил необходимо привести этапы метода в соответствие с особенностями решаемой задачи, который представлен в виде последовательности шагов 1-17.
Шаг 1. Инициализация. Задаются статические параметры работы метода: коэффициенты  . Для каждого из возможных классов выходных значений создается свое пространство поиска, и, соответственно, свое отдельное множество агентов, отдельный граф поиска, представляющий собой лингвистические термы, которые могут быть включены в правила, а также для каждого пространства поиска рассчитываются эвристические значения значимости отдельного терма.
. Для каждого из возможных классов выходных значений создается свое пространство поиска, и, соответственно, свое отдельное множество агентов, отдельный граф поиска, представляющий собой лингвистические термы, которые могут быть включены в правила, а также для каждого пространства поиска рассчитываются эвристические значения значимости отдельного терма.

где  - значение эвристической значимости лингвистического терма для описания класса ;
- значение эвристической значимости лингвистического терма для описания класса ;  - экземпляр входной выборки, содержащей экземпляров;
- экземпляр входной выборки, содержащей экземпляров;  - значение функции принадлежности объекта терму и классу q, соответственно;
- значение функции принадлежности объекта терму и классу q, соответственно;  - количество лингвистических термов;
- количество лингвистических термов;  - количество классов. В каждом пространстве поиска каждому узлу графа поиска ставится в соответствие начальное значение количества дискретных составляющих (ДС)
- количество классов. В каждом пространстве поиска каждому узлу графа поиска ставится в соответствие начальное значение количества дискретных составляющих (ДС) 
 где
где  - значение количества ДС для -го терма в пространстве поиска для -го класса на первой итерации поиска.
- значение количества ДС для -го терма в пространстве поиска для -го класса на первой итерации поиска.
Шаг 2. Установить:  . Шаг 3. Установить: . Шаг 4. Установить:
. Шаг 3. Установить: . Шаг 4. Установить:  . Шаг 5. Установить:
. Шаг 5. Установить:  . Шаг 6. Выбор терма для добавления в правило -го агента в пространстве поиска -го класса. Шаг 6.1. Для -го агента на основе правила случайного выбора рассчитывается вероятность включения -го лингвистического терма в правило, описывающего -й класс выходного значения
. Шаг 6. Выбор терма для добавления в правило -го агента в пространстве поиска -го класса. Шаг 6.1. Для -го агента на основе правила случайного выбора рассчитывается вероятность включения -го лингвистического терма в правило, описывающего -й класс выходного значения  где
где  - вероятность добавления -го терма в правило -го агента в пространстве поиска для -го класса;
- вероятность добавления -го терма в правило -го агента в пространстве поиска для -го класса;  - множество термов, которые могут быть добавлены в правило -го агента. Формирование данного множества определяет вид правил, которые могут составляться в процессе поиска, то есть предполагается, что правило может включать выражения типа ИЛИ. После добавления терма из данного множества исключается только данный терм, если же предполагается, что правило не может включать выражения типа ИЛИ, то кроме выбранного терма, исключаются и все термы, описывающие данный атрибут.
- множество термов, которые могут быть добавлены в правило -го агента. Формирование данного множества определяет вид правил, которые могут составляться в процессе поиска, то есть предполагается, что правило может включать выражения типа ИЛИ. После добавления терма из данного множества исключается только данный терм, если же предполагается, что правило не может включать выражения типа ИЛИ, то кроме выбранного терма, исключаются и все термы, описывающие данный атрибут.
Шаг 6.2. Проверить условие  где
где  - случайное число из интервала [0; 1]. Если условие выполняется, тогда лингвистический терм добавляется в правило -го агента, удаляется из множества возможных термов для данного агента и выполняется переход к шагу 7. В противном случае - переход к шагу 6.3.
- случайное число из интервала [0; 1]. Если условие выполняется, тогда лингвистический терм добавляется в правило -го агента, удаляется из множества возможных термов для данного агента и выполняется переход к шагу 7. В противном случае - переход к шагу 6.3.
Шаг 6.3. Установить  . Шаг 6.4. Если были рассмотрены все термы, то установить: . Переход к шагу 6.1. Шаг 7. Проверка завершения перемещения -го агента. Шаг 7.1. Если множество термов, которые -й агент может добавить в формируемое правило, пусто, то выполняется переход к шагу 8. Шаг 7.2. Определяется, сколько экземпляров -го класса покрывает правило -го агента. Шаг 7.2.1. Для экземпляра o, относящегося к классу , рассчитывается степень соответствия сформированного правила
. Шаг 6.4. Если были рассмотрены все термы, то установить: . Переход к шагу 6.1. Шаг 7. Проверка завершения перемещения -го агента. Шаг 7.1. Если множество термов, которые -й агент может добавить в формируемое правило, пусто, то выполняется переход к шагу 8. Шаг 7.2. Определяется, сколько экземпляров -го класса покрывает правило -го агента. Шаг 7.2.1. Для экземпляра o, относящегося к классу , рассчитывается степень соответствия сформированного правила 

где  - степень соответствия между правилом -го агента
- степень соответствия между правилом -го агента  и экземпляром ;
и экземпляром ;  - мера соответствия между -м атрибутом в правиле и соответствующим атрибутом экземпляра . Данная мера рассчитывается следующим образом:
- мера соответствия между -м атрибутом в правиле и соответствующим атрибутом экземпляра . Данная мера рассчитывается следующим образом:

где - отдельный терм, относящийся к области описания атрибута ;
 - количество термов, относящихся к области описания атрибута .
- количество термов, относящихся к области описания атрибута .
Шаг 7.2.2. Проверить условие: 
где  - заданный параметр, который определяет, какое минимальное значения соответствия является достаточным, чтобы считать, что правило в достаточной степени описывает объект . Если условие выполняется, то считается, что данный объект o покрывается правилом .
- заданный параметр, который определяет, какое минимальное значения соответствия является достаточным, чтобы считать, что правило в достаточной степени описывает объект . Если условие выполняется, то считается, что данный объект o покрывается правилом .
Шаги 7.2.1 и 7.2.2 выполняются для всех экземпляров, относящихся к классу , и на основании получаемых данных увеличивается счетчик  , в котором хранится количество экземпляров, покрываемых правилом .
, в котором хранится количество экземпляров, покрываемых правилом .
Шаг 7.3. Проверить условие:  где
где  - предельное минимальное количество экземпляров -го класса, которое должно покрываться правилом. Если указанное условие выполняется, то считается, что правило покрывает необходимое количество экземпляров, и -й агент завершил свое перемещение, выполняется переход к шагу 8. В противном случае - выполняется переход к шагу 5.
- предельное минимальное количество экземпляров -го класса, которое должно покрываться правилом. Если указанное условие выполняется, то считается, что правило покрывает необходимое количество экземпляров, и -й агент завершил свое перемещение, выполняется переход к шагу 8. В противном случае - выполняется переход к шагу 5.
Шаг 8. Если  , то установить:
, то установить:  и выполнить переход к шагу 5. В противном случае - переход к шагу 9. Шаг 9. Если
и выполнить переход к шагу 5. В противном случае - переход к шагу 9. Шаг 9. Если  , то установить: и выполнить переход к шагу 4. В противном случае - переход к шагу 10. Шаг 10. Случайным образом формируются базы правил. Создается
, то установить: и выполнить переход к шагу 4. В противном случае - переход к шагу 10. Шаг 10. Случайным образом формируются базы правил. Создается  баз правил, при этом для описания каждого класса выходного значения выбирается одно правило из соответствующего пространства поиска. Шаг 11. Оценка качества сформированных баз правил. Для оценки качества баз правил используется входная обучающая выборка, для каждого экземпляра которой выбирается правило с самой высокой степенью совпадения, на основании которого определяется расчетный класс, к которому относится данный экземпляр, основываясь на соответствующей базе правил.
баз правил, при этом для описания каждого класса выходного значения выбирается одно правило из соответствующего пространства поиска. Шаг 11. Оценка качества сформированных баз правил. Для оценки качества баз правил используется входная обучающая выборка, для каждого экземпляра которой выбирается правило с самой высокой степенью совпадения, на основании которого определяется расчетный класс, к которому относится данный экземпляр, основываясь на соответствующей базе правил.
Основываясь на данных, полученных при помощи базы знаний, исходя из заданной обучающей выборки, рассчитываем оценку качества базы правил:  где
где  - количество экземпляров, для которых класс был определен неверно с помощью заданной базы правил; - качество прогнозирования класса экземпляров на основе соответствующей базы правил.
- количество экземпляров, для которых класс был определен неверно с помощью заданной базы правил; - качество прогнозирования класса экземпляров на основе соответствующей базы правил.
Шаг 12. Проверить условие:  где
где  - качество прогнозирования базы знаний, которая характеризуется наилучшей точностью прогнозирования;
- качество прогнозирования базы знаний, которая характеризуется наилучшей точностью прогнозирования;  - приемлемое качество прогнозирования. Если указанное условие выполняется, то производится переход к шагу 17, в противном случае - переход к шагу 13. Шаг 13. Добавление дискретных составляющих (ДС). Добавление ДС выполняется с целью повышения приоритетности тех термов, включение которых в правила способствует повышению качеству прогнозирования результирующих баз правил.
- приемлемое качество прогнозирования. Если указанное условие выполняется, то производится переход к шагу 17, в противном случае - переход к шагу 13. Шаг 13. Добавление дискретных составляющих (ДС). Добавление ДС выполняется с целью повышения приоритетности тех термов, включение которых в правила способствует повышению качеству прогнозирования результирующих баз правил.
В связи с этим количество добавляемого коэффициента приоритетности прямо пропорционально качеству прогнозирования базы правила, в которое входит заданное нечеткое правило. При этом добавление ДС предлагается выполнять только для тех термов, входящих в правила баз нечетких правил, для которых выполняется условие:  где
где  - коэффициент, определяющий, насколько близко качество прогнозирования базы правил
- коэффициент, определяющий, насколько близко качество прогнозирования базы правил  должно приближаться к лучшему качеству прогнозирования
должно приближаться к лучшему качеству прогнозирования  , чтобы можно было применять процедуру добавления ДС для правил, входящих в данную базу правил
, чтобы можно было применять процедуру добавления ДС для правил, входящих в данную базу правил  . Таким образом, добавление ДС выполняется для каждого терма, входящего в правило, которое, в свою очередь, входит в базу правил .
. Таким образом, добавление ДС выполняется для каждого терма, входящего в правило, которое, в свою очередь, входит в базу правил .  где
где  - количество ДС для терма в пространстве поиска для класса , который определяется с помощью соответствующего правила.
- количество ДС для терма в пространстве поиска для класса , который определяется с помощью соответствующего правила.
Шаг 14. Исключение ДС. Для исключения худших термов, то есть таких, которые при включении их в правила, понижают качество прогнозирования с помощью соответствующего правила, применяют процедуру исключения ДС, которая выполняется в конце каждой итерации и применяется для всех узлов во всех графах поиска. Исключение ДС морской цели (МЦ) выполняется в соответствии с формулой :  где
где  - коэффициент исключения, который задается при инициализации.
- коэффициент исключения, который задается при инициализации.
Шаг 15. Если  , тогда установить:
, тогда установить: 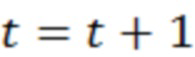 и выполнить переход к шагу 16, в противном случае - считается, что выполнено максимально допустимое количество итераций, и выполняется переход к шагу 17. Шаг 16. Перезапуск агентов. Все данные обновляются, агенты размещаются в случайные точки пространств поиска. Переход к шагу 3. Шаг 17. Останов.
и выполнить переход к шагу 16, в противном случае - считается, что выполнено максимально допустимое количество итераций, и выполняется переход к шагу 17. Шаг 16. Перезапуск агентов. Все данные обновляются, агенты размещаются в случайные точки пространств поиска. Переход к шагу 3. Шаг 17. Останов.
На основе проведенных экспериментов были получены базы нечетких правил, которые характеризовались точностью классификации МЦ данным методом в 85,6 %. Следовательно, предложенный метод обеспечивает формирование редуцированной базы нечетких правил, которая характеризуется достаточно точными результатами, сокращая при этом временные затраты на расчет. Существенным достоинством данного метода, является то, что поиск производится одновременно на нескольких графах, что позволяет контролировать влияние термов на качество прогнозирования распознавания разных классов МЦ.
Таким образом, обнаружив цель по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объекта, и используя для выполнения операций распознавания, трактом нейросетевого распознавания и классификации морской цели, модифицированную комбинированную распознающую сеть, состоящую из сетей Кохонена, Гросберга и сети MAXNET, параметры настройки которых регулирует тракт синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков в виде шестислойной нейро-нечеткой сети Ванга-Менделя, позволяющий на основе обучающих выборок данных создавать структуру логически прозрачных нейронных и нейро-нечетких сетей, а также настраивать их параметры без оптимизационной подгонки весов, синтезировать нейронные и нейро-нечеткие модели в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков для распознавания класса МЦ трактом нейросетевого распознавания и классификации морской цели по амплитудно-частотным характеристикам в автоматизированном режиме, принятия решения о степени принадлежности исследуемой области спектра объекту классификации (надводный или подводный объект).
Техническим результатом предлагаемого изобретения является автоматизация процесса распознавания классов морских целей (надводный или подводный объект), обнаруженных по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объектов, с использованием методов, позволяющих на основе обучающих выборок данных создавать структуру нейронных и нейро-нечетких сетей, а также настраивать их параметры без оптимизационной подгонки весов, синтезировать нейронные и нейро-нечеткие модели в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков, осуществляемой при помощи тракта синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков, необходимых для реализации конечного процесса классификации в тракте нейросетевого распознавания и классификации, что обеспечивает повышение вероятности достоверной классификации морской цели на 5-7 % большую, чем при использовании прототипа.
Система обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта промышленно применима, так как для ее создания используются распространенные компоненты и изделия радиотехнической промышленности и вычислительной техники.
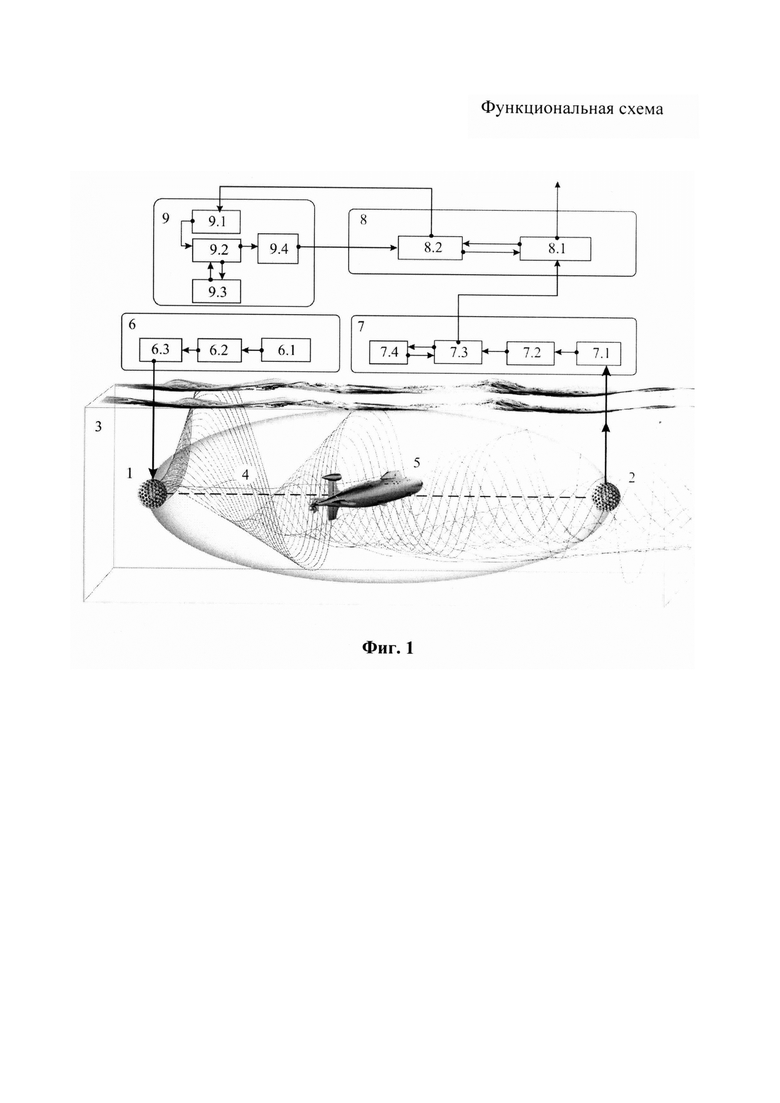
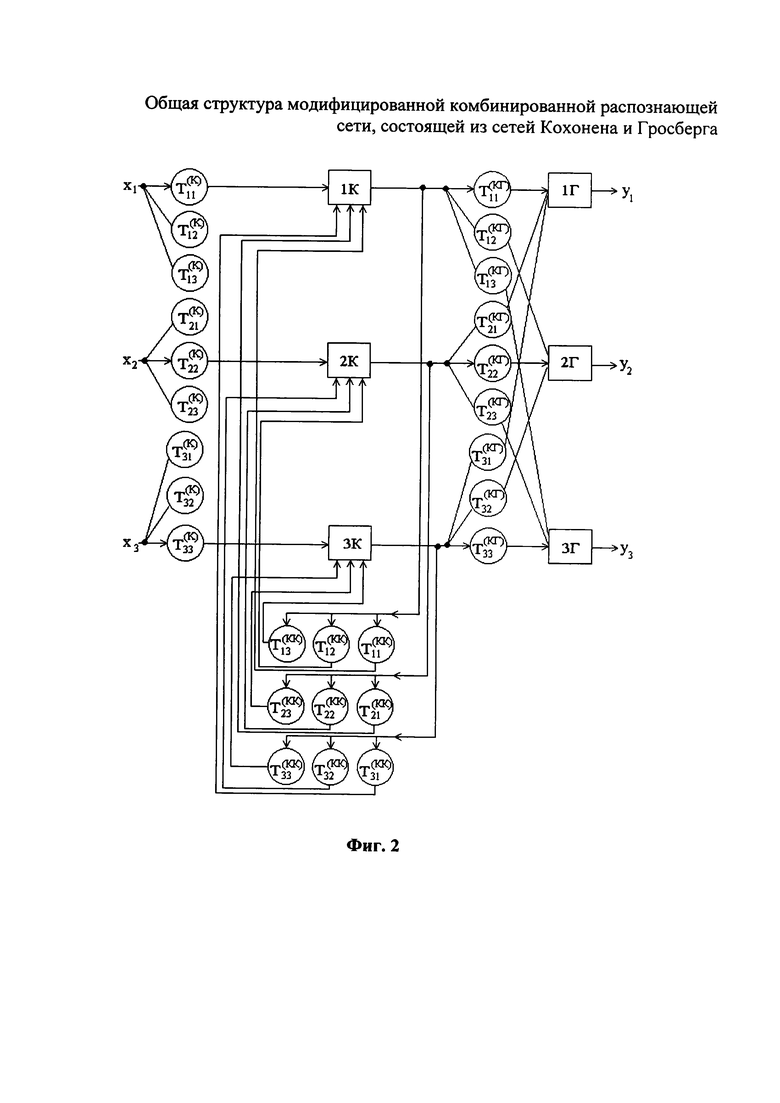
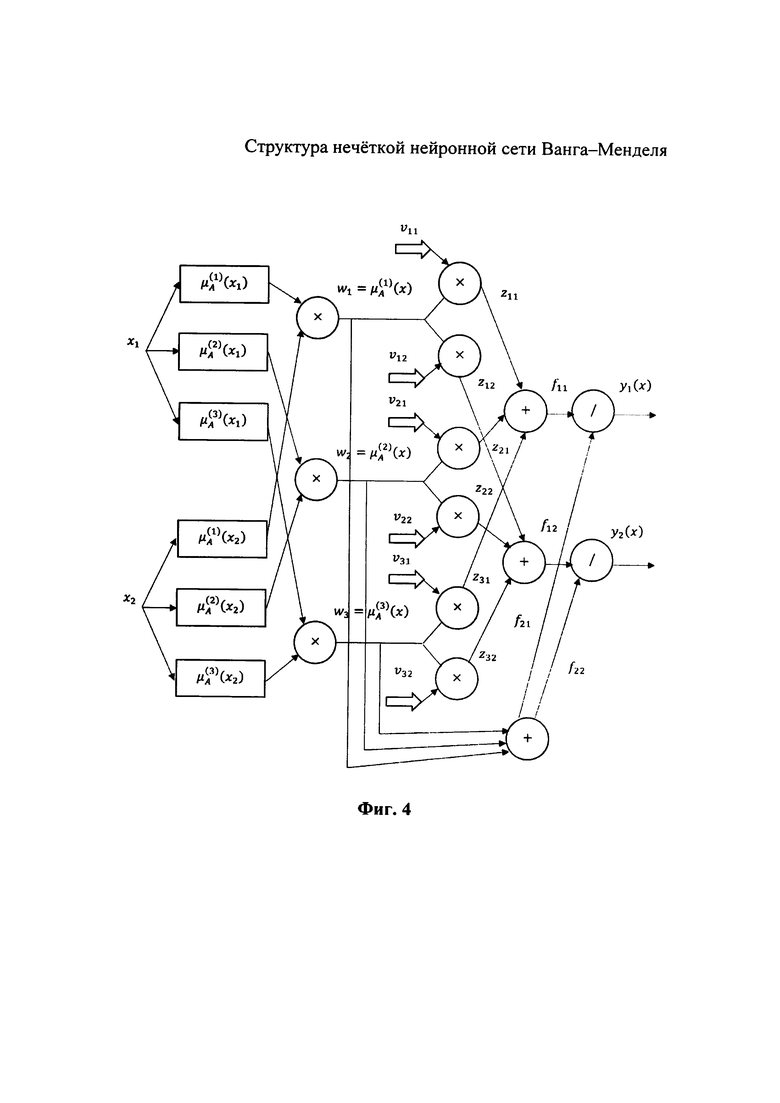
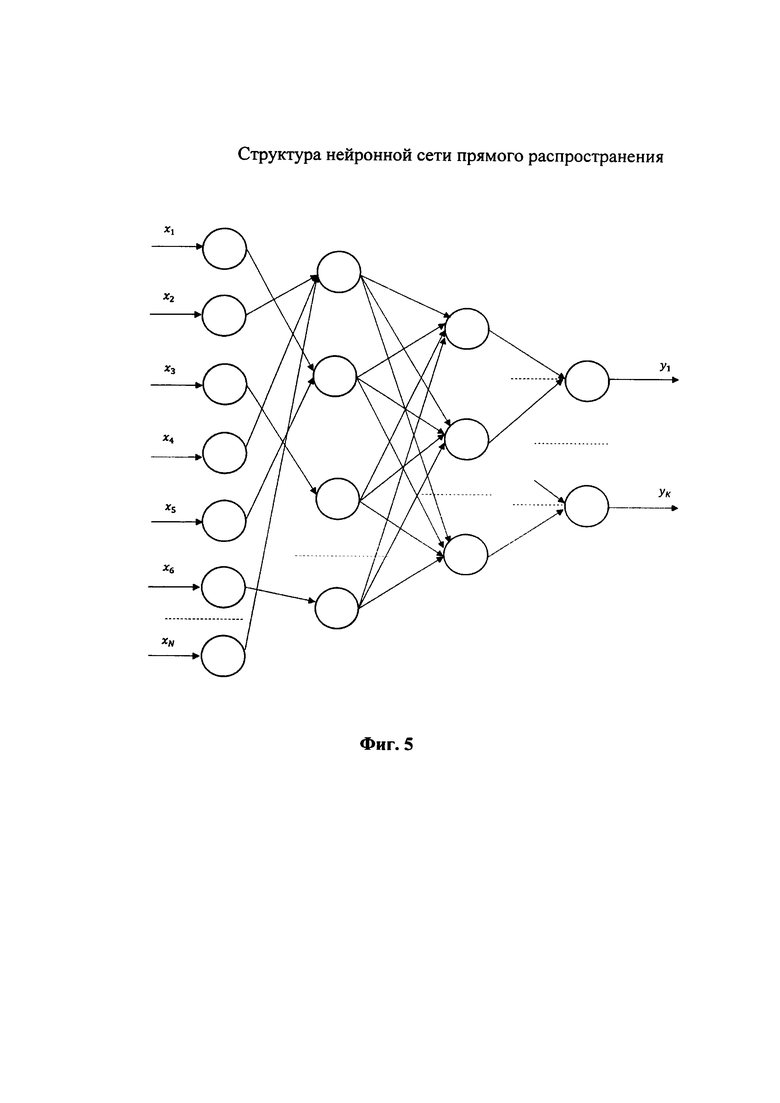
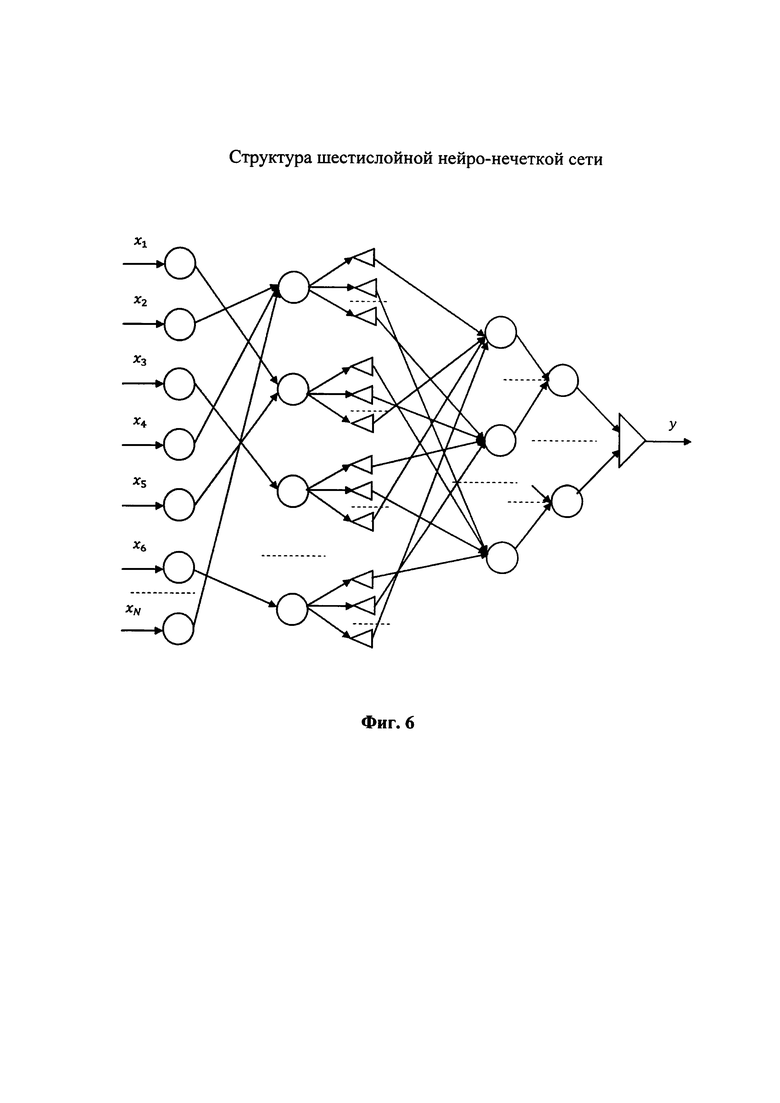
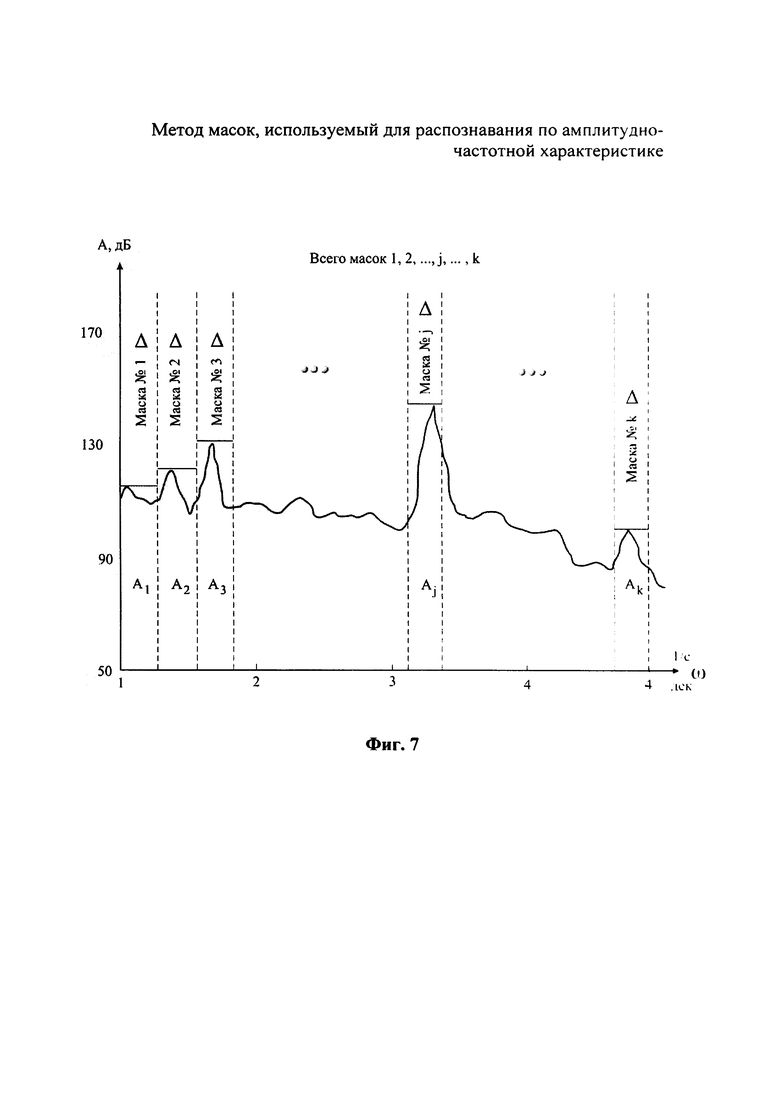
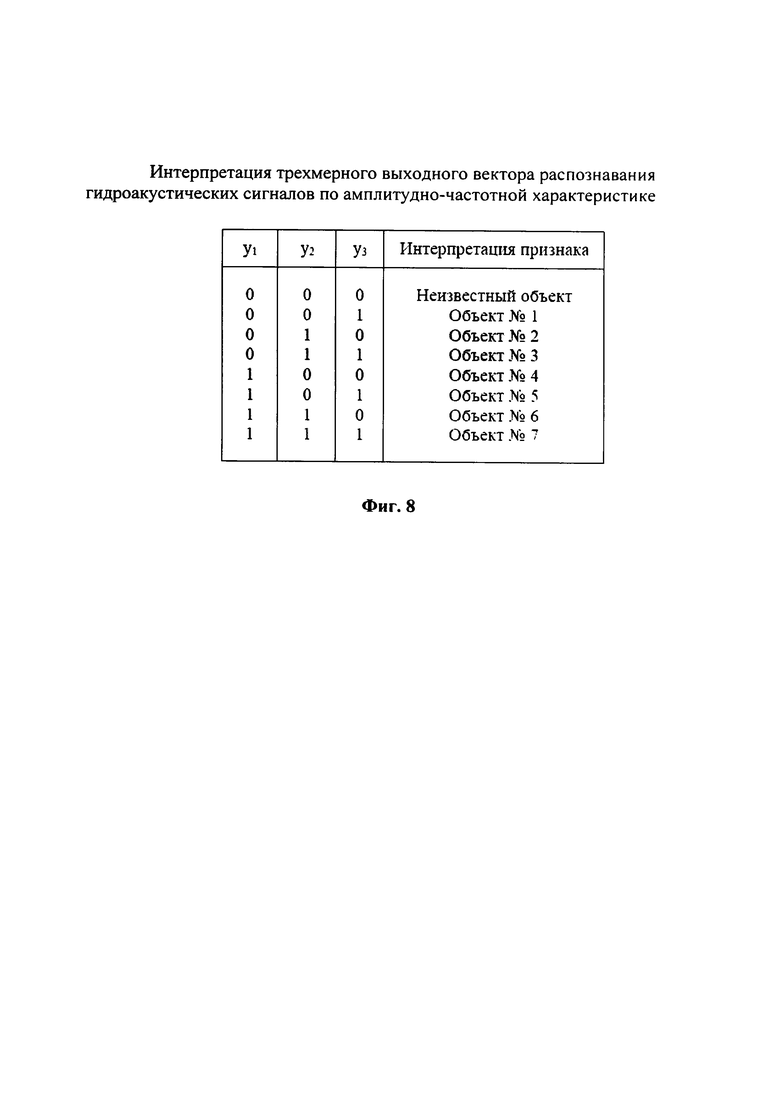
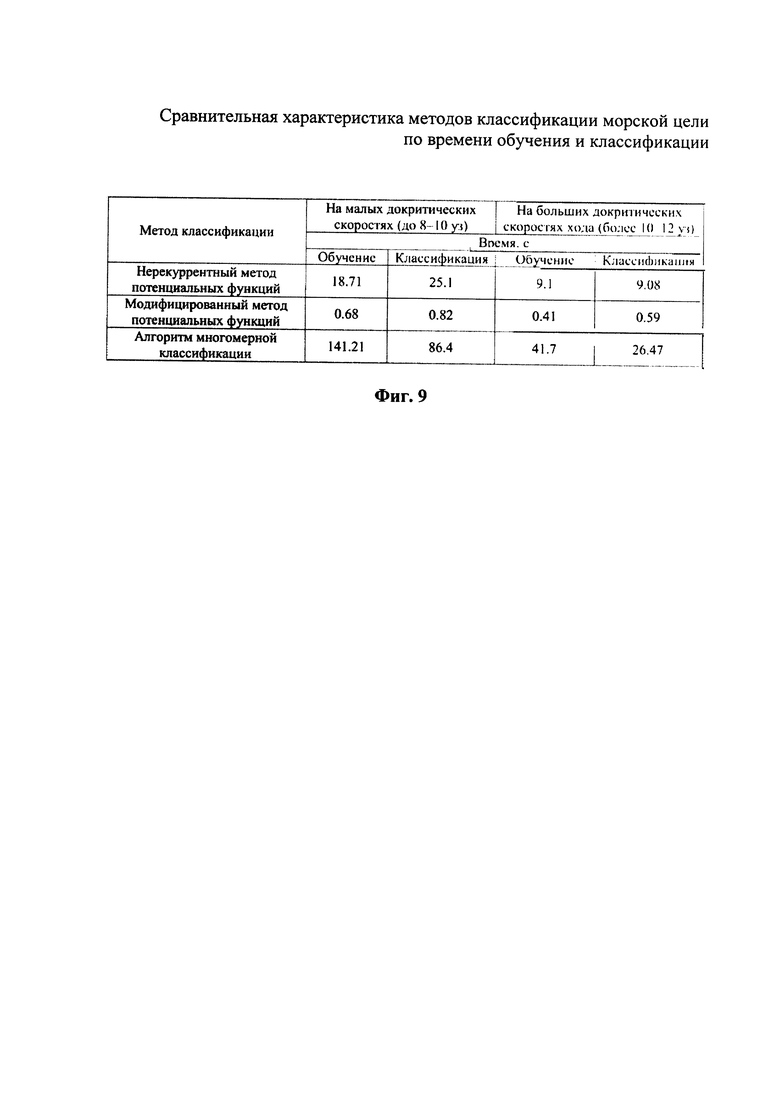
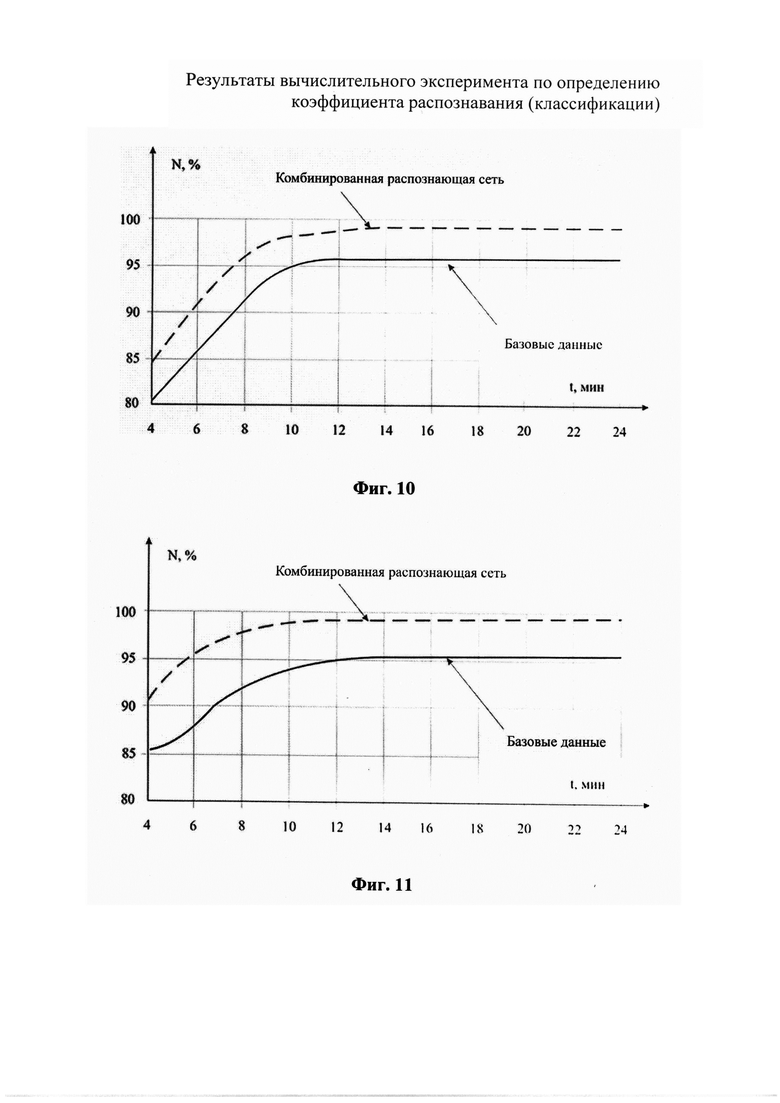
Использование: изобретение относится к гидроакустике и может быть использовано для построения интеллектуальных автоматизированных систем классификации морских целей, обнаруженных по признакам амплитудно-фазовой модуляции низкочастотных сигналов накачки морской среды излучениями и полями объектов. Сущность: система обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта содержит сформированную в морской среде рабочую зону нелинейного взаимодействия и параметрического преобразования волн накачки и информационных волн. Длина рабочей зоны равна протяженности контролируемого участка морской среды, для чего излучающий и приемный преобразователи размещены на противоположных границах участка. Вход излучающего преобразователя соединен подводным кабелем с выходом тракта излучения сигналов накачки, который содержит последовательно соединенные генератор сигналов накачки стабилизированной частоты, усилитель мощности и блок согласования его выхода с подводным кабелем. Выход приемного преобразователя соединен подводным кабелем с входом тракта приема, обработки и регистрации информационных сигналов, который содержит последовательно соединенные широкополосный усилитель, преобразователь частотно-временного масштаба, спектроанализатор и функционально связанный с ним регистратор. При этом выход спектроанализатора тракта приема, обработки и регистрации информационных сигналов соединен с входом блока распознавания класса цели по амплитудно-частотным характеристикам тракта нейросетевого распознавания и классификации, охваченного обратной связью с блоком обучения. Дополнительно введен тракт синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков, содержащий блок анализа информации о признаках и топологии обучающей выборки, вход которого соединен с выходом блока обучения тракта нейросетевого распознавания и классификации, а выход соединен с входом блока синтеза нейронной сети, охваченного обратной связью с блоком синтеза нейро-нечетких сетей, выход которого соединен с входом логического устройства, функцию которого выполняет шестислойная нейро-нечеткая сеть Ванга-Менделя, где производится синтез нейронных и нейро-нечетких моделей в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков морской цели и формируется нечеткий логический вывод для блока обучения тракта нейросетевого распознавания и классификации, обеспечивающего конечное классификационное решение по обнаруженным морским целям, согласно степени принадлежности исследуемой области спектра объекту классификации. Технический результат: автоматизация процесса распознавания классов морских целей (надводный или подводный объект), повышение вероятности достоверной классификации морской цели на 5-7 % большую, чем при использовании прототипа. 11 ил.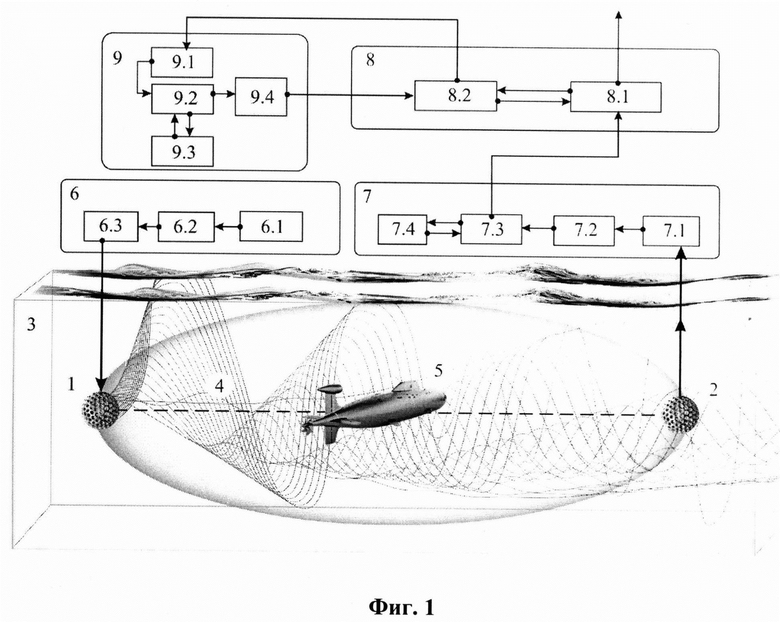
Система обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта, содержащая сформированную в морской среде рабочую зону нелинейного взаимодействия и параметрического преобразования волн накачки и информационных волн, причем длина рабочей зоны равна протяженности контролируемого участка морской среды, для чего излучающий и приемный преобразователи размещены на его противоположных границах, при этом вход излучающего преобразователя соединен подводным кабелем с выходом тракта излучения сигналов накачки, который содержит последовательно соединенные генератор сигналов накачки стабилизированной частоты, усилитель мощности и блок согласования его выхода с подводным кабелем, а выход приемного преобразователя соединен подводным кабелем с входом тракта приема, обработки и регистрации информационных сигналов, который содержит последовательно соединенные широкополосный усилитель, преобразователь частотно-временного масштаба, спектроанализатор и функционально связанный с ним регистратор, при этом выход спектроанализатора тракта приема, обработки и регистрации информационных сигналов соединен с входом блока распознавания класса цели по амплитудно-частотным характеристикам тракта нейросетевого распознавания и классификации, охваченного обратной связью с блоком обучения, отличающаяся тем, что дополнительно введен тракт синтеза нейросетевых и нейро-нечетких распознающих моделей с группировкой признаков, содержащий блок анализа информации о признаках и топологии обучающей выборки, вход которого соединен с выходом блока обучения тракта нейросетевого распознавания и классификации, а выход соединен с входом блока синтеза нейронной сети, охваченного обратной связью с блоком синтеза нейро-нечетких сетей, выход которого соединен с входом логического устройства, функцию которого выполняет шестислойная нейро-нечеткая сеть Ванга-Менделя, где производится синтез нейронных и нейро-нечетких моделей в неитеративном режиме с линеаризацией, факторной группировкой и сверткой признаков морской цели и формируется нечеткий логический вывод для блока обучения тракта нейросетевого распознавания и классификации, обеспечивающего конечное классификационное решение по обнаруженным морским целям, согласно степени принадлежности исследуемой области спектра объекту классификации.
| Способ обнаружения и нейросетевого распознавания признаков полей различной физической природы, генерируемых морскими целями | 2018 |
|
RU2682088C1 |
| Интеллектуальная система обнаружения и классификации морских целей | 2018 |
|
RU2681242C1 |
| Способ классификации морских объектов на основе весовых коэффициентов их классификационных признаков | 2018 |
|
RU2687994C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ В МОРСКОЙ СРЕДЕ | 2011 |
|
RU2472116C1 |
| Масштабируемая система обнаружения и классификации морских целей с элементами искусственного интеллекта | 2018 |
|
RU2695527C1 |
| CN 111624585 A, 04.09.2020. | |||

