Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу обнаружения полос движения и к устройству обнаружения полос движения.
Уровень техники
[0002] Известно устройство для того, чтобы обнаруживать полосу движения из изображения поверхности дороги (патентный документ 1). Устройство, раскрытое в патентном документе 1, формирует горизонтальную краевую гистограмму для множества краевых точек, проецируемых наоборот на координаты поверхности дороги. Устройство затем получает позиции пиков в краевой гистограмме и задает краевые точки, способствующие соответствующим позициям пиков, в группу, с тем чтобы обнаруживать разделительные линии.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Не прошедшая экспертизу патентная публикация (Япония) номер 2005-100000
Сущность изобретения
[0004] Когда транспортное средство сменяет полосу движения, позиции разделительных линий относительно транспортного средства сдвигаются относительно позиций до смены полосы движения на величину поперечного перемещения транспортного средства после смены полосы движения. Как результат, краевая группа, принадлежащая общим разделительным линиям, не может извлекаться корректно.
[0005] С учетом вышеизложенной проблемы, настоящее изобретение предоставляет способ обнаружения полос движения и устройство обнаружения полос движения, допускающие обнаружение полосы движения без влияния посредством изменения расстояния между транспортным средством и характеристическими точками полосы движения, извлекаемыми из смены полосы движения.
Решение задачи
[0006] Аспект настоящего изобретения представляет собой способ обнаружения полос движения для обнаружения границ полосы движения согласно множеству характеристических точек полосы движения, обнаруженных посредством датчика обнаружения цели, установленного в транспортном средстве, при этом когда обнаруживается смена полосы движения транспортного средства, способ корректирует характеристические точки полосы движения, обнаруженные и накопленные до того, как начинается смена полосы движения, согласно величине перемещения транспортного средства в направлении ширины транспортного средства, извлекаемой из смены полосы движения, и обнаруживает границы полосы движения после того, как завершается смена полосы движения транспортного средства, посредством использования скорректированных характеристических точек полосы движения, обнаруженных и накопленных до того, как начинается смена полосы движения, и характеристических точек полосы движения, обнаруженных и накопленных после того, как завершается смена полосы движения.
Преимущества изобретения
[0007] Способ согласно аспекту настоящего изобретения может обнаруживать полосу движения без влияния посредством изменения расстояния между транспортным средством и характеристическими точками полосы движения, извлекаемыми из смены полосы движения.
Краткое описание чертежей
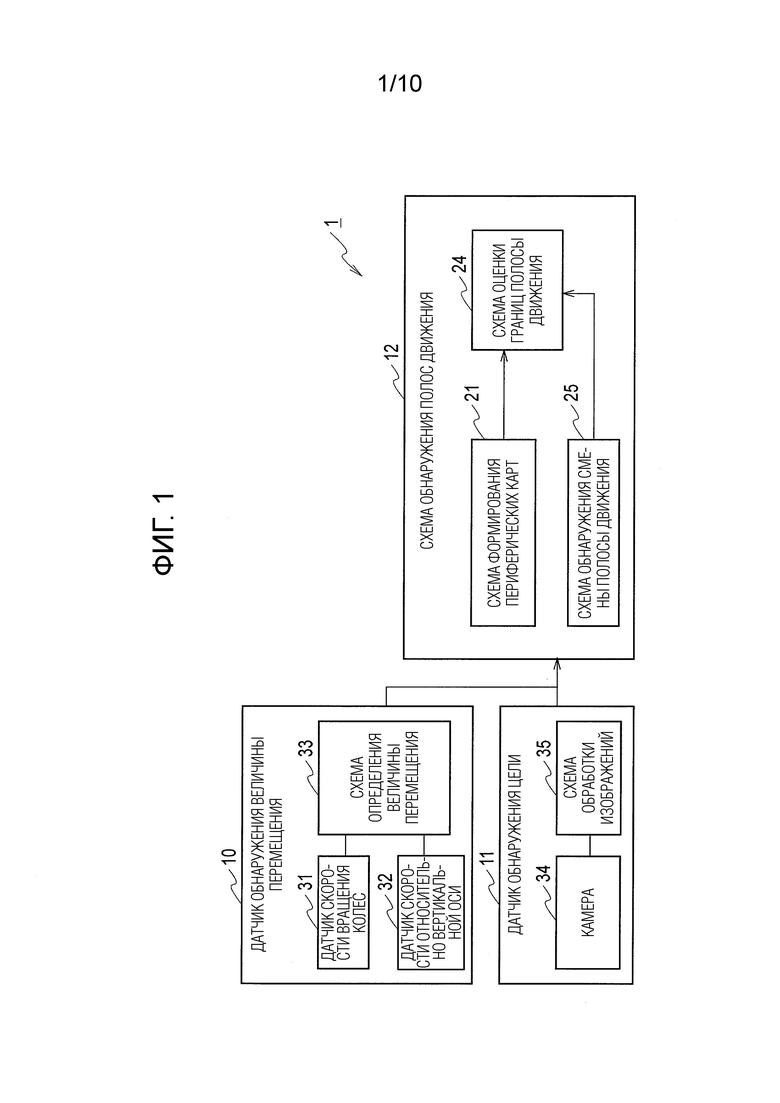
[0008] Фиг. 1 является блок-схемой, показывающей конфигурацию устройства 1 обнаружения полос движения согласно первому варианту осуществления.
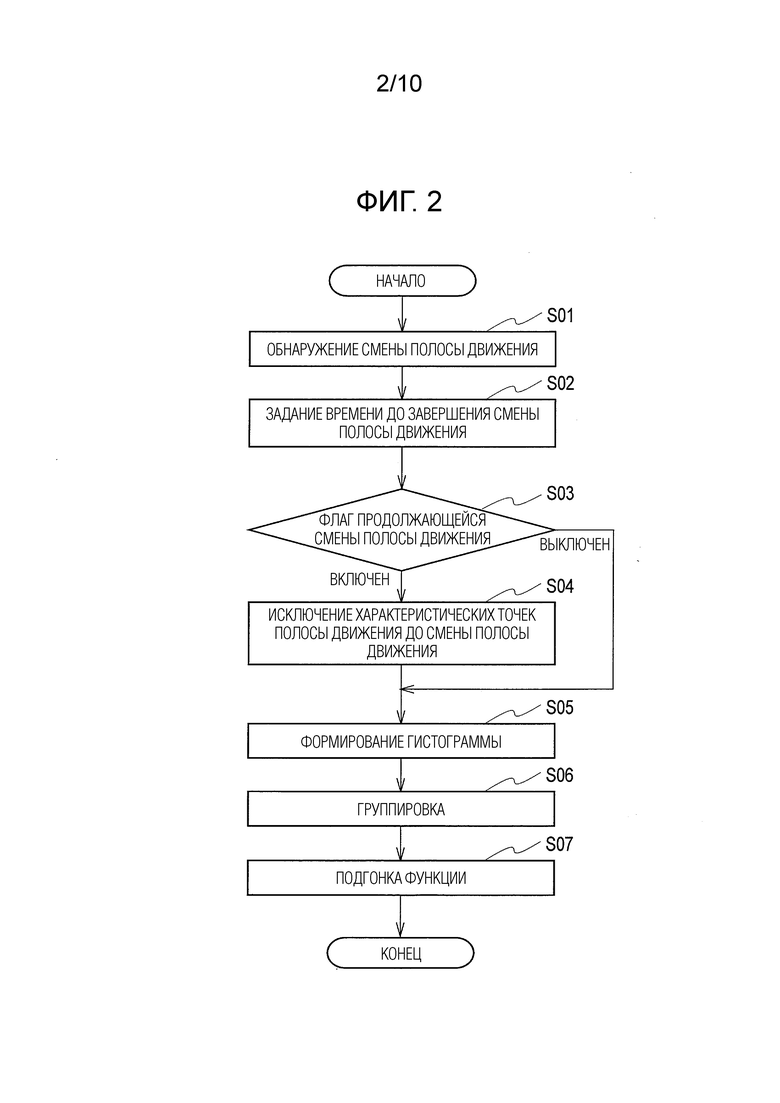
Фиг. 2 является блок-схемой последовательности операций, иллюстрирующей способ обнаружения полос движения с использованием устройства 1 обнаружения полос движения, показанного на фиг. 1.
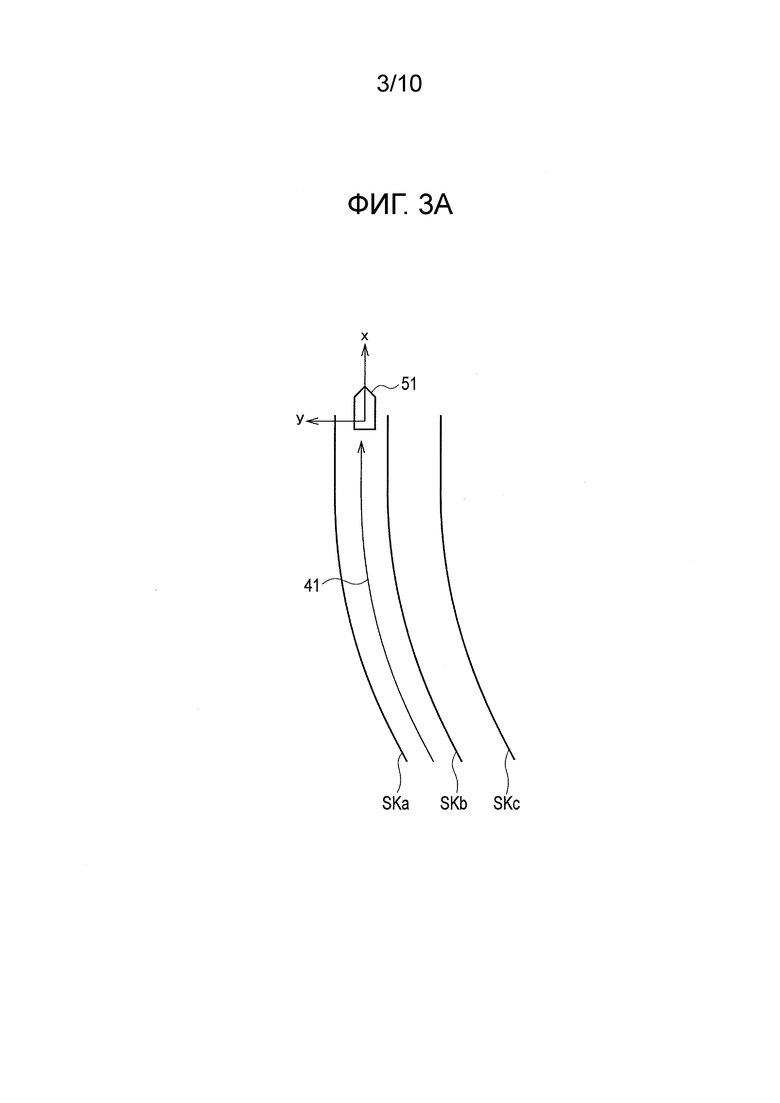
Фиг. 3A является видом "с высоты птичьего полета", показывающим состояние, в котором транспортное средство 51 движется на левой стороне двухполосной дороги, немного изгибающейся вправо.
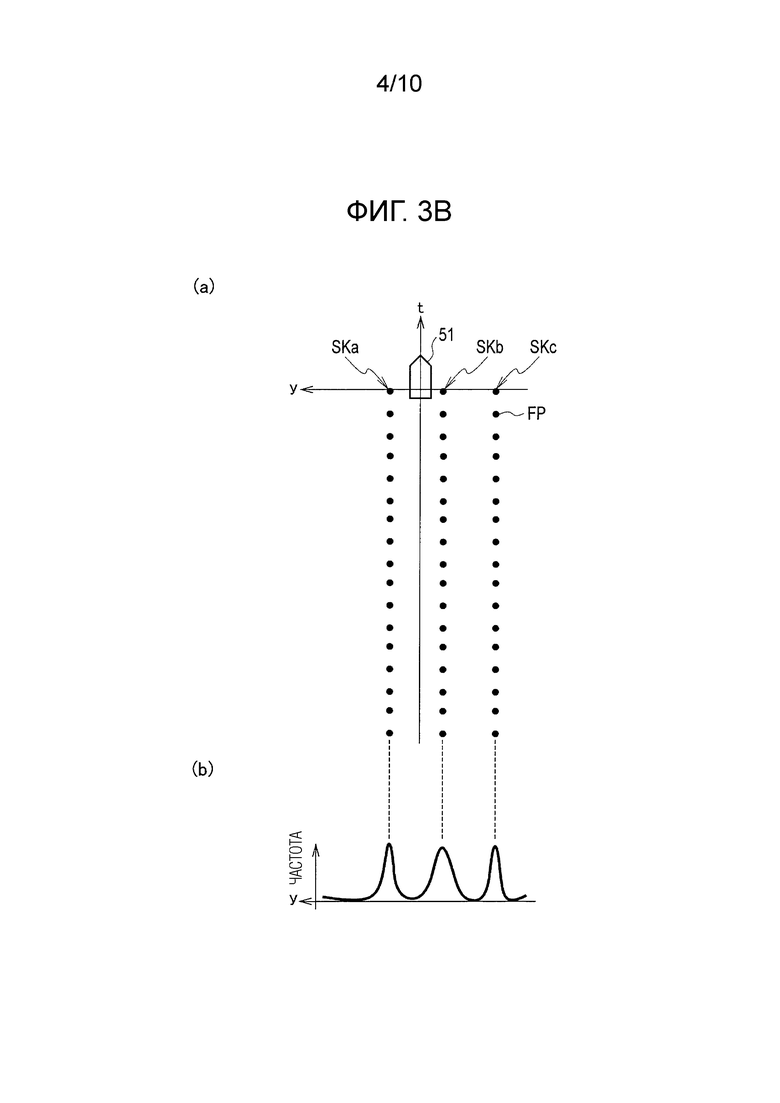
Фиг. 3B: фиг. 3B(a) является видом "с высоты птичьего полета", иллюстрирующим вторую периферическую карту, сформированную из первой периферической карты, показанной на фиг. 3A, и фиг. 3B(b) является графиком, иллюстрирующим гистограмму, сформированную из второй периферической карты на фиг. 3B(a).
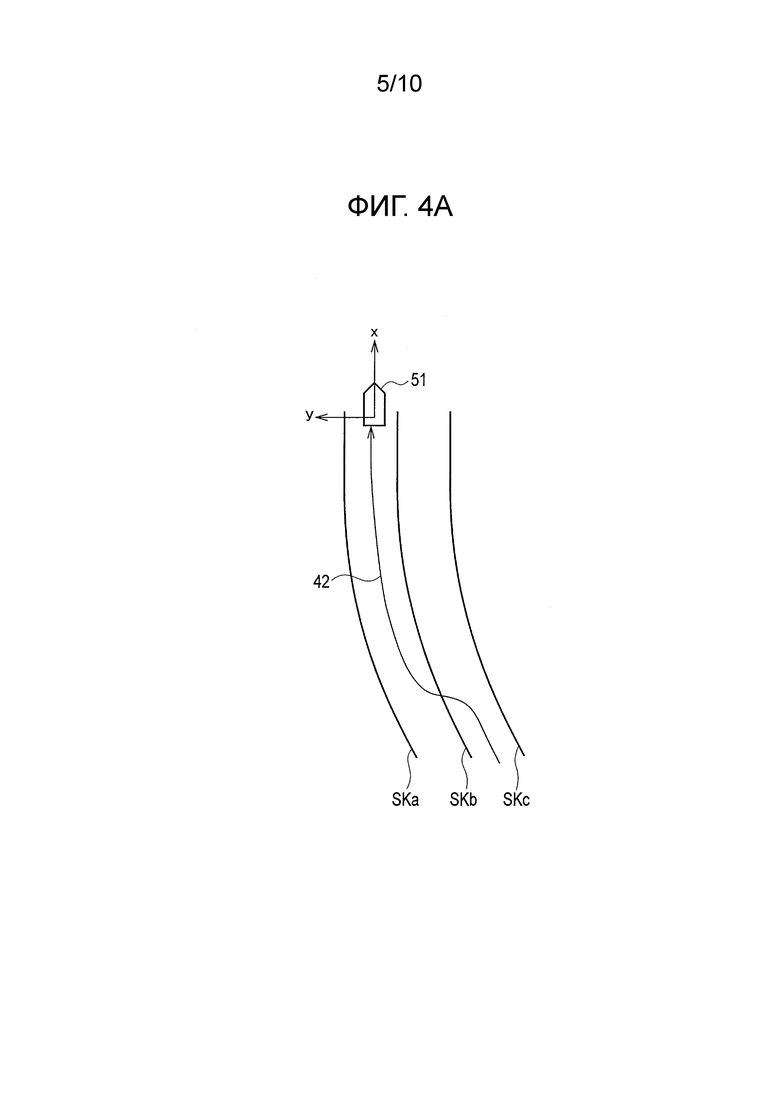
Фиг. 4A является видом "с высоты птичьего полета", показывающим состояние смены полосы движения, в которой транспортное средство 51, движущееся на правой стороне двухполосной дороги, немного изгибающейся вправо, переходит на левую полосу движения.
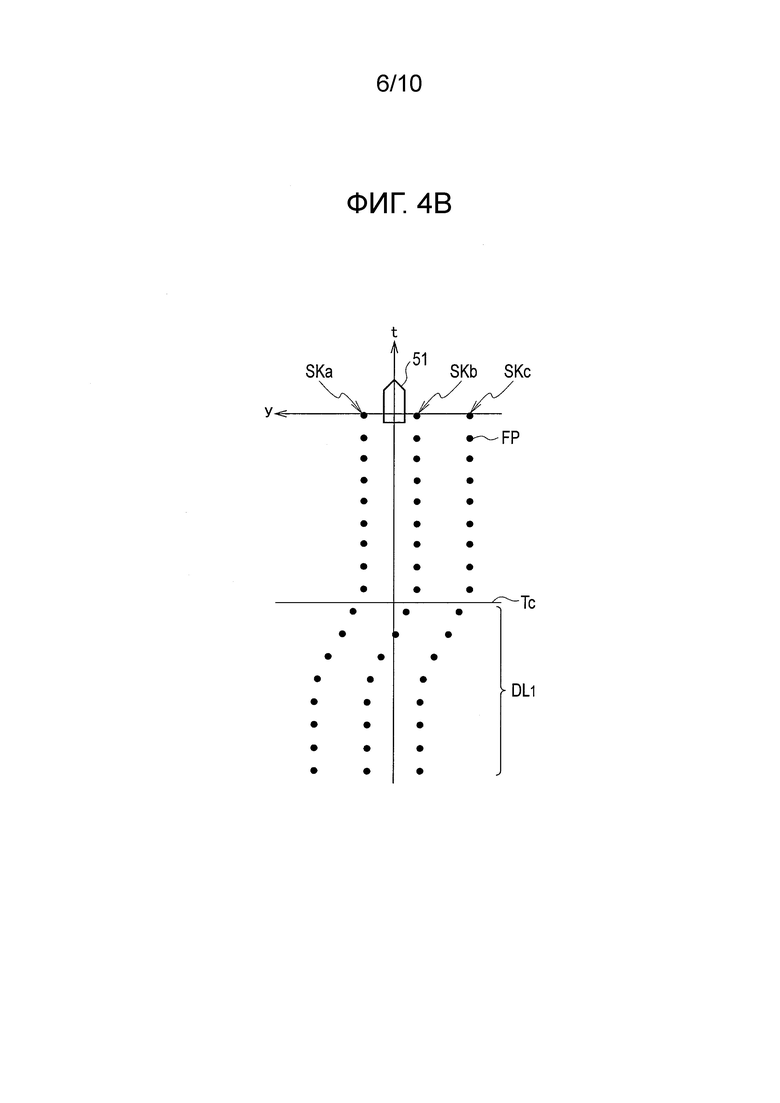
Фиг. 4B является видом "с высоты птичьего полета", иллюстрирующим вторую периферическую карту, сформированную из первой периферической карты, показанной на фиг. 4A.
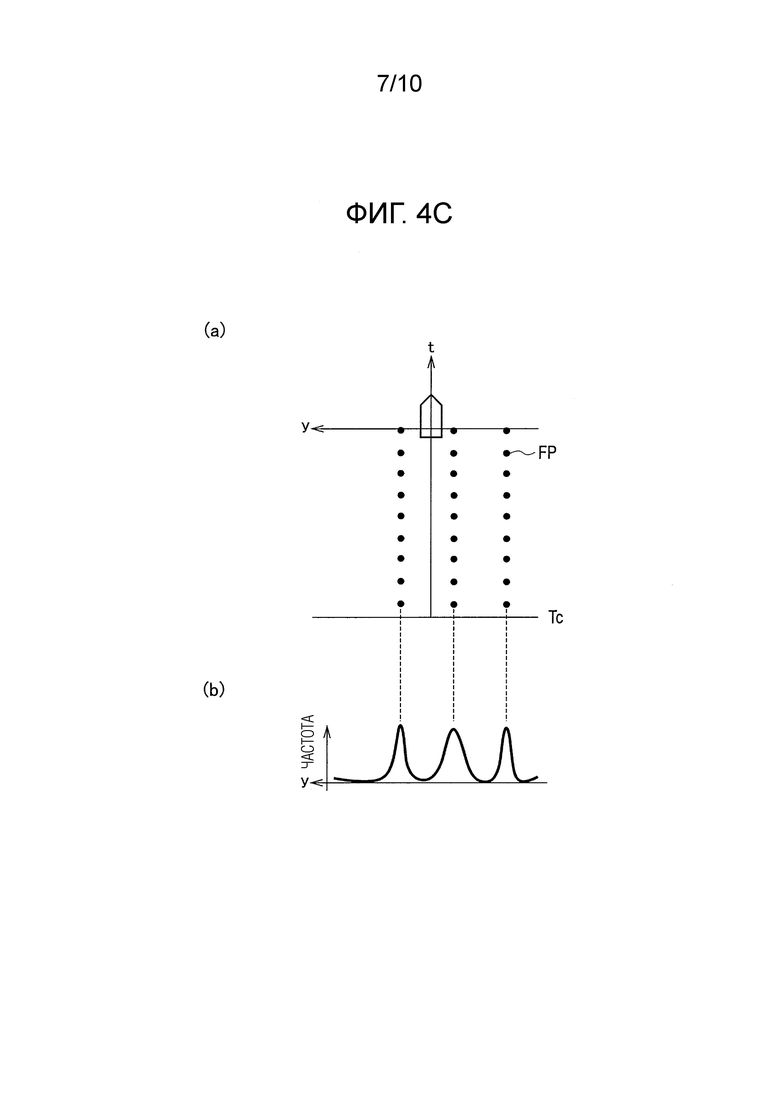
Фиг. 4C: фиг. 4C(a) является видом, показывающим третью карту, из которой характеристические точки FP полосы движения, обнаруженные до времени (Tc) до завершения смены полосы движения, исключаются из второй периферической карты, показанной на фиг. 4B, и фиг. 4C(b) является графиком, иллюстрирующим гистограмму, сформированную из третьей карты.
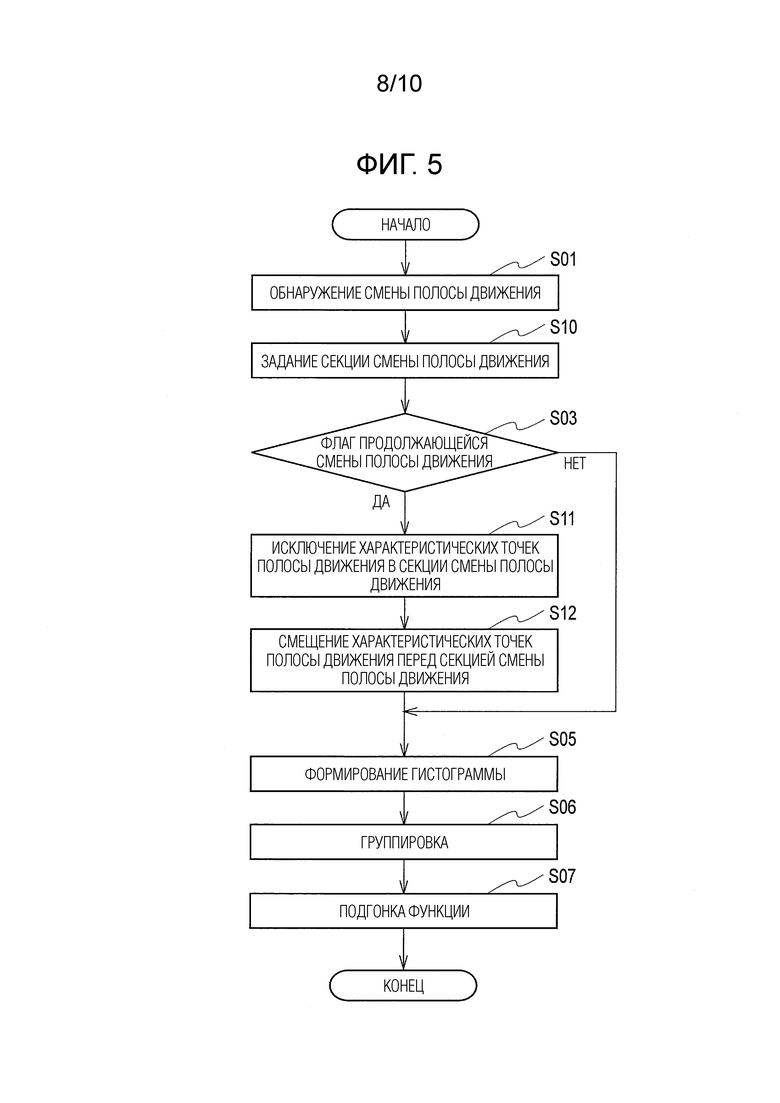
Фиг. 5 является блок-схемой последовательности операций, иллюстрирующей способ обнаружения полос движения с использованием устройства 1 обнаружения полос движения согласно второму варианту осуществления.
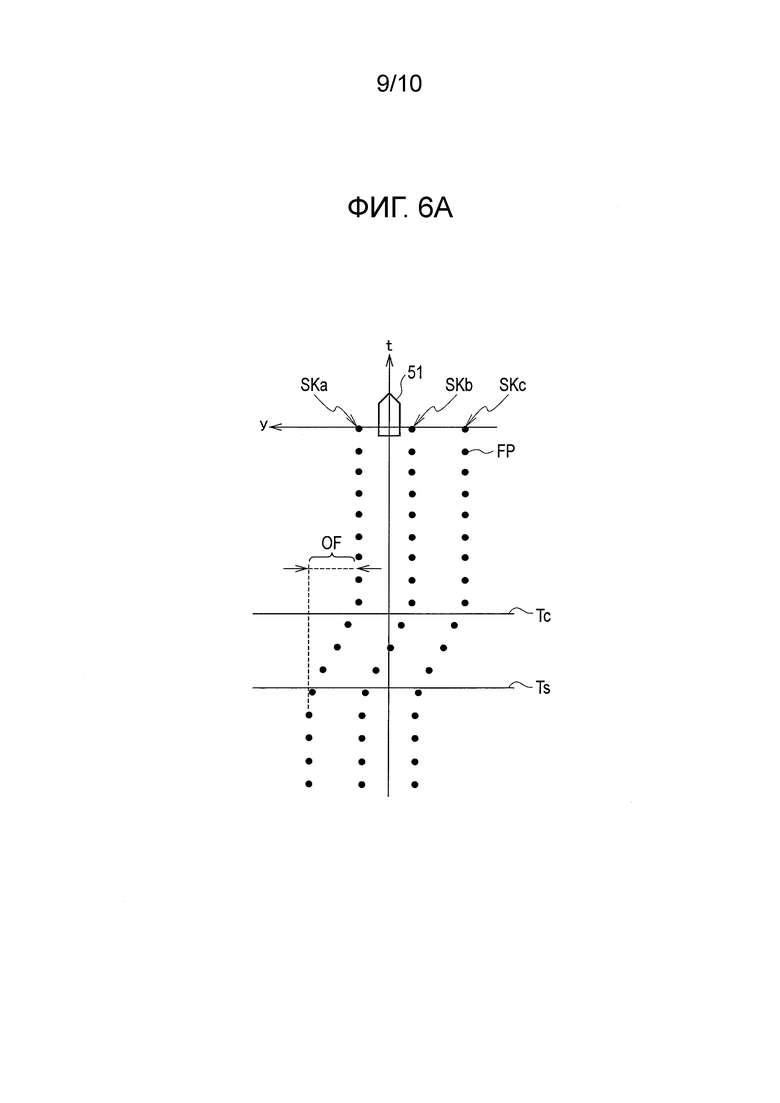
Фиг. 6A является видом "с высоты птичьего полета", иллюстрирующим вторую периферическую карту, сформированную из первой периферической карты, показанной на фиг. 4A.
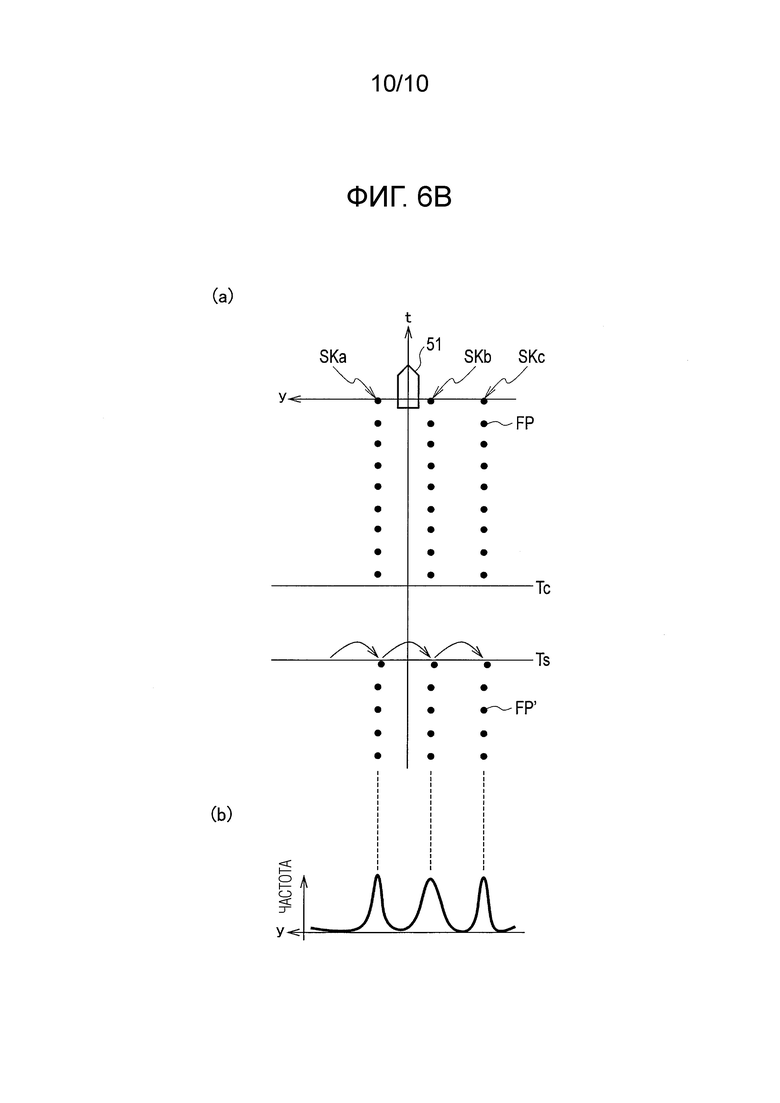
Фиг. 6B: фиг. 6B(a) является видом, показывающим третью карту, на которой величина (OF) смены полосы движения характеристических точек FP полосы движения, включенных в координаты Y, обнаруженные до того, как начинается смена полосы движения, смещается относительно второй периферической карты, показанной на фиг. 6A, и фиг. 6B(b) является графиком, иллюстрирующим гистограмму, сформированную из третьей карты.
Подробное описание вариантов осуществления
[0009] Первый вариант осуществления
Ниже подробно описывается вариант осуществления со ссылкой на чертежи.
[0010] Полная конфигурация устройства 1 обнаружения полос движения согласно первому варианту осуществления описывается со ссылкой на фиг. 1. Устройство 1 обнаружения полос движения обнаруживает границы полосы движения, в которой движется транспортное средство, согласно характеристическим точкам полосы движения на поверхности дороги, обнаруженным посредством датчика, смонтированного на транспортном средстве. Устройство 1 обнаружения полос движения включает в себя датчик 11 обнаружения цели, смонтированный на транспортном средстве, датчик 10 обнаружения величины перемещения для определения величины перемещения транспортного средства на основе скорости перемещения и скорости относительно вертикальной оси транспортного средства и схему 12 обнаружения полос движения для обнаружения границ полосы движения на основе характеристических точек полосы движения, обнаруженных посредством датчика 11 обнаружения цели, и величины перемещения транспортного средства, определенной посредством датчика 10 обнаружения величины перемещения.
[0011] Датчик 11 обнаружения цели обнаруживает сигнальные линии дорожной разметки (включающие в себя разделительные линии), размеченные на поверхности дороги вокруг транспортного средства. Датчик 11 обнаружения цели включает в себя камеру 34, установленную в транспортном средстве, и схему 35 обработки изображений для обнаружения линий дорожной разметки, включающих в себя сигнальные линии дорожной разметки, из цифрового изображения, захваченного посредством камеры 34. Обнаруженные линии дорожной разметки указываются в качестве групп характеристических точек, включающих в себя множество характеристических точек полосы движения и показывающих позиции линий дорожной разметки. Схема 35 обработки изображений должна обнаруживать только точки (края яркости), яркость которых в изображении варьируется быстро или прерывисто, в качестве характеристических точек полосы движения. Камера 34 прикрепляется к транспортному средству со стороной захвата, направленной вперед относительно транспортного средства, и включает в себя широкоугольную линзу, допускающую захват изображений с широким углом обзора. Камера 34 в силу этого может обнаруживать сигнальные линии дорожной разметки (разделительные линии), которые транспортное средство переезжает во время смены полосы движения.
[0012] Датчик 10 обнаружения величины перемещения включает в себя датчик 31 скорости вращения колес, датчик 32 скорости относительно вертикальной оси и схему 33 определения величины перемещения. Датчик 31 скорости вращения колес определяет скорость вращения колес транспортного средства. Датчик 32 скорости относительно вертикальной оси определяет скорость относительно вертикальной оси транспортного средства. Схема 33 определения величины перемещения определяет величину перемещения транспортного средства в течение предварительно определенного периода времени согласно скорости вращения колес и скорости относительно вертикальной оси транспортного средства. Величина перемещения транспортного средства включает в себя, например, направление перемещения и расстояние перемещения транспортного средства.
[0013] Схема 12 обнаружения полос движения может представлять собой микрокомпьютер, включающий в себя центральный процессор (CPU), запоминающее устройство и модуль ввода-вывода. Компьютерная программа (программа обнаружения полос движения) для инструктирования микрокомпьютеру служить в качестве схемы 12 обнаружения полос движения устанавливается с возможностью выполняться в микрокомпьютере. Соответственно, микрокомпьютер функционирует в качестве схемы 12 обнаружения полос движения. Хотя настоящий вариант осуществления проиллюстрирован со случаем, в котором программное обеспечение устанавливается, чтобы изготавливать схему 12 обнаружения полос движения, следует понимать, что специализированные аппаратные средства для выполнения каждой обработки информации, как описано ниже, могут быть подготовлены, чтобы составлять схему 12 обнаружения полос движения. Множество схем (21, 24, 25), включенных в схему 12 обнаружения полос движения, могут состоять из отдельных аппаратных средств. В дополнение к схеме 12 обнаружения полос движения, схема 35 обработки изображений и схема 33 определения величины перемещения могут состоять из программного обеспечения или специализированных аппаратных средств. Схема 12 обнаружения полос движения также может служить в качестве электронного модуля управления (ECU), используемого для другой обработки управления в транспортном средстве.
[0014] Схема 12 обнаружения полос движения включает в себя схему 21 формирования периферических карт, схему 25 обнаружения смены полосы движения и схему 24 оценки границ полосы движения. Схема 21 формирования периферических карт накапливает характеристические точки полосы движения, обнаруженные посредством датчика 11 обнаружения цели, смонтированного на транспортном средстве, в соответствии с величиной перемещения транспортного средства. В частности, схема 21 формирования периферических карт формирует карту по всей периферии транспортного средства (первую периферическую карту), состоящую из групп характеристических точек, полученных таким образом, что предыстории обнаружения групп характеристических точек, обнаруженных посредством датчика 11 обнаружения цели, соединяются между собой согласно величине перемещения транспортного средства за период, в течение которого обнаруживается каждая группа характеристических точек. А именно, схема 21 формирования периферических карт соединяет соответствующие характеристические точки полосы движения, совместно измеряемые в различные моменты времени, с учетом величины перемещения транспортного средства. Схема 21 формирования периферических карт в силу этого накапливает предыстории обнаружения характеристических точек полосы движения для того, чтобы формировать первую периферическую карту.
[0015] Более конкретно, камера 34 захватывает изображение поверхности дороги по всей периферии транспортного средства за предварительно определенное время. Датчик 10 обнаружения величины перемещения обнаруживает направление перемещения и расстояние перемещения транспортного средства в течение предварительно определенного времени. Схема 21 формирования периферических карт перемещает позиции характеристических точек полосы движения на расстояние перемещения транспортного средства в направлении, противоположном направлению перемещения транспортного средства. Схема 21 формирования периферических карт повторяет эту операцию и соединяет несколько характеристических точек полосы движения, совместно измеряемых в различные моменты времени, с учетом величины перемещения транспортного средства, с тем чтобы накапливать предыстории обнаружения характеристических точек полосы движения для того, чтобы формировать первую периферическую карту.
[0016] Схема 25 обнаружения смены полосы движения обнаруживает смену полосы движения согласно изображению поверхности дороги впереди транспортного средства, захваченному посредством камеры 34. В частности, схема 25 обнаружения смены полосы движения может определять то, переезжает или нет транспортное средство разделительные линии, согласно позициям разделительных линий в изображении, поскольку сторона захвата камеры 34 закрепляется относительно транспортного средства. Когда определяется то, что транспортное средство переезжает разделительные линии, схема 25 обнаружения смены полосы движения обнаруживает смену полосы движения. Схема 25 обнаружения смены полосы движения может обнаруживать смену полосы движения в момент, когда транспортное средство фактически переезжает разделительные линии, или в момент, когда транспортное средство предположительно переезжает разделительные линии. Схема 25 обнаружения смены полосы движения может определять смену полосы движения на основе информации, отличной от изображения, захваченного посредством камеры 34. Например, схема 25 обнаружения смены полосы движения может определять смену полосы движения согласно комбинации позиции транспортного средства на карте и рабочего состояния указателя поворота или комбинации угла поворота при рулении или угла поворота и рабочего состояния указателя поворота. Как описано ниже, схема 25 обнаружения смены полосы движения может определять смену полосы движения согласно неразрывности характеристических точек полосы движения на второй периферической карте.
[0017] Как показано на фиг. 3A, транспортное средство 51 движется на левой стороне двухполосной дороги, немного изгибающейся вправо. Фиг. 3A иллюстрирует три границы (SKa, SKb и SKc) полосы движения, задающие двухполосную дорогу. Первая периферическая карта, сформированная посредством схемы 21 формирования периферических карт, включает в себя группы характеристических точек (не показаны), обнаруженные вдоль трех границ (SKa, SKb и SKc) полосы движения. Настоящий вариант осуществления использует координаты на плоскости, в которых направление движения транспортного средства 51 задается как ось X, и направление ширины транспортного средства 51 задается как ось Y, на основе позиции транспортного средства 51, которая представляет собой начало координат двух осей.
[0018] Схема 24 оценки границ полосы движения обнаруживает накопленные характеристические точки полосы движения, а именно, границы полосы движения на основе первой периферической карты. В частности, схема 24 оценки границ полосы движения сначала определяет неразрывность характеристических точек полосы движения, включенных в первую периферическую карту. Схема 24 оценки границ полосы движения затем обнаруживает границы полосы движения на основе неразрывности характеристических точек полосы движения. Далее приводятся подробности операции обработки схемы 24 оценки границ полосы движения.
[0019] Схема 24 оценки границ полосы движения определяет неразрывность нескольких характеристических точек полосы движения согласно частоте в координате в направлении ширины транспортного средства (в направлении по оси Y). Например, схема 24 оценки границ полосы движения формирует вторую периферическую карту, на которой позиция транспортного средства 51 представляет собой начало координат, направление ширины транспортного средства 51 представляет собой ось Y, и ось, ортогональная к оси Y, представляет собой временную ось (ось t), без учета величины перемещения транспортного средства 51. Схема 24 оценки границ полосы движения наносит, на вторую периферическую карту, множество характеристических точек FP полосы движения, включенных в первую периферическую карту, показанную на фиг. 3A, в соответствии со временем (t) обнаружения и позициями (координатами Y) в направлении ширины транспортного средства, как показано на фиг. 3B(a).
[0020] Когда транспортное средство 51 движется вдоль полос движения, как показано на фиг. 3A, позиции (координаты Y) характеристических точек FP полосы движения в направлении ширины транспортного средства являются постоянными, как показано на второй периферической карте на фиг. 3B(a), поскольку величина перемещения транспортного средства 51 не учитывается относительно временной оси (оси t). Следовательно, характеристические точки FP полосы движения проиллюстрированы вдоль прямых линий, параллельных оси t, независимо от формы дороги (с плавным изгибом вправо).
[0021] Схема 24 оценки границ полосы движения выбирает характеристические точки FP полосы движения, показанные на второй периферической карте, на одномерной гистограмме вдоль оси Y, как показано на фиг. 3B(b). Схема 24 оценки границ полосы движения может определять неразрывность характеристических точек FP полосы движения из гистограммы.
[0022] Схема 24 оценки границ полосы движения обнаруживает пики на гистограмме (координаты Y) и группирует характеристические точки FP полосы движения на второй периферической карте в расчете на пик, с тем чтобы извлекать группы граничных точек полосы движения. Например, схема 24 оценки границ полосы движения может группировать характеристические точки FP полосы движения, выбранные на гистограмме, посредством инструктирования соответствующим характеристическим точкам FP полосы движения принадлежать ближайшему пику. Группировка характеристических точек FP полосы движения на второй периферической карте проще группировки характеристических точек FP полосы движения на первой периферической карте. Каждая из сгруппированных характеристических точек FP полосы движения составляет одну группу граничных точек полосы движения. Схема 24 оценки границ полосы движения в силу этого может определять неразрывность характеристических точек FP полосы движения на основе частоты в координате в направлении ширины транспортного средства (координате Y) характеристических точек FP полосы движения. Группировка посредством использования гистограммы обеспечивает возможность схеме 24 оценки границ полосы движения извлекать множество групп граничных точек полосы движения, параллельных между собой, одновременно. Вместо использования гистограммы, схема 24 оценки границ полосы движения может инструктировать кривым аппроксимироваться в характеристические точки FP полосы движения, посредством использования известного способа, с тем чтобы подгонять множество кривых к группам граничных точек. Схема 24 оценки границ полосы движения затем может определять то, являются или нет подогнанные кривые параллельными между собой.
[0023] Затем, схема 24 оценки границ полосы движения оценивает контуры границ (SKa, SKb и SKc) полосы движения на основе извлеченных групп граничных точек полосы движения. В частности, схема 24 оценки границ полосы движения подгоняет кривую, выраженную посредством дорожной модельной функции, к соответствующим группам граничных точек полосы движения на первой периферической карте, с тем чтобы оценивать контуры границ (SKa, SKb и SKc) полосы движения. Дорожная модельная функция, например, представляет собой кубическую функцию (y=ax3+bx2+cx+d). Схема 24 оценки границ полосы движения вычисляет коэффициенты a, b, c и d кубической функции. Хотя подгонка функции посредством метода наименьших квадратов может применяться к вычислению, надежная оценка, такая как согласование на основе случайных выборок (RANSAC), может использоваться для того, чтобы повышать стабильность.
[0024] Как описано выше, когда транспортное средство 51 движется вдоль полос движения, как показано на фиг. 3A, группы граничных точек полосы движения могут легко извлекаться посредством использования пиков (координат Y) на гистограмме, независимо от контуров дороги.
[0025] Напротив, группы граничных точек полосы движения может быть затруднительным точно извлекать посредством способа, описанного со ссылкой на фиг. 3A и фиг. 3B, когда транспортное средство 51 сменяет полосу движения, как проиллюстрировано на фиг. 4A.
[0026] Фиг. 4A является видом "с высоты птичьего полета", показывающим состояние смены полосы движения, в которой транспортное средство 51, движущееся на правой стороне двухполосной дороги, немного изгибающейся вправо, переходит на левую полосу движения. В этом случае, первая периферическая карта, сформированная посредством схемы 21 формирования периферических карт, включает в себя группы характеристических точек (не показаны), обнаруженные вдоль трех границ (SKa, SKb и SKc) полосы движения, как и в случае, показанном на фиг. 3A. Тем не менее, поперечные позиции (координаты Y) границ (SKa, SKb и SKc) полосы движения относительно транспортного средства 51 изменяются в течение периода смены полосы движения, что отличается от случая, показанного на фиг. 3A.
[0027] Следовательно, вторая периферическая карта, показанная на фиг. 4B, отличается от второй периферической карты, показанной на фиг. 3B. В частности, координаты Y характеристических точек FP полосы движения варьируются в течение периода от начала смены полосы движения до завершения смены полосы движения (в течение периода смены полосы движения), поскольку величина перемещения транспортного средства 51 не учитывается на второй периферической карте. Координаты Y характеристических точек FP полосы движения, обнаруженных до начала смены полосы движения, в силу этого сдвигаются относительно координат Y характеристических точек FP полосы движения, обнаруженных после завершения смены полосы движения. Как результат, пики на оси Y на одномерной гистограмме, на которой выбраны характеристические точки FP полосы движения, показанные на второй периферической карте, показанной на фиг. 4B, не соответствуют пикам, как показано на фиг. 3B(b). В силу этого трудно точно извлекать группы характеристических точек полосы движения в соответствии с пиками.
[0028] Схема 24 оценки границ полосы движения в силу этого оценивает границы полосы движения в соответствии с неразрывностью характеристических точек полосы движения, обнаруженных после завершения смены полосы движения. В частности, как показано на фиг. 4C(a), формируется третья периферическая карта, на которой характеристические точки FP полосы движения, обнаруженные до времени (Tc), когда завершается смена полосы движения, исключаются из второй периферической карты, показанной на фиг. 4B. Схема 24 оценки границ полосы движения затем извлекает группы характеристических точек полосы движения посредством использования пиков (координат Y) на гистограмме, сформированной из третьей периферической карты, как показано на фиг. 4C(b). Поскольку координаты Y характеристических точек FP полосы движения, обнаруженных после завершения смены полосы движения, являются практически постоянными, группы характеристических точек полосы движения могут легко извлекаться посредством использования пиков (координат Y) на гистограмме идентично тому, как проиллюстрировано на фиг. 3B.
[0029] После этого, как описано выше, схема 24 оценки границ полосы движения подгоняет кривую, представленную посредством дорожной модельной функции, к соответствующим группам граничных точек полосы движения на первой периферической карте, с тем чтобы оценивать контуры границ (SKa, SKb и SKc) полосы движения.
[0030] Схема 24 оценки границ полосы движения задает время (Tc), когда завершается смена полосы движения, на основе времени, когда схема 25 обнаружения смены полосы движения обнаруживает смену полосы движения. Например, продолжительность периода, в течение которого транспортное средство сменяет полосу движения, может предварительно задаваться равной пяти секундам, и время, когда предварительно определенное время (2,5 секунды) проходит с момента, когда схема 25 обнаружения смены полосы движения обнаруживает смену полосы движения, может определяться в качестве времени (Tc), когда завершается смена полосы движения. Период, в течение которого транспортное средство сменяет полосу движения, и предварительно определенное время могут регулироваться в зависимости от ширины полосы движения, включенной в картографическую информацию, или скорости транспортного средства.
[0031] После этого ниже описывается пример способа обнаружения полос движения с использованием устройства 1 обнаружения полос движения, показанного на фиг. 1, когда транспортное средство 51 сменяет полосу движения, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 2. Далее приводится рабочий процесс, выполняемый посредством схемы 12 обнаружения полос движения, включенной в устройство 1 обнаружения полос движения. Обработка, показанная на фиг. 2, многократно выполняется в предварительно определенном цикле.
[0032] На этапе S01, схема 25 обнаружения смены полосы движения обнаруживает смену полосы движения из изображения поверхности дороги впереди транспортного средства, захваченного посредством камеры 34. Схема 25 обнаружения смены полосы движения затем задает флаг продолжающейся смены полосы движения. В частности, схема 25 обнаружения смены полосы движения обнаруживает смену полосы движения согласно координатам Y характеристических точек FP полосы движения. Смена полосы движения может обнаруживаться, когда знаки (+/-) в координатах Y характеристических точек FP полосы движения изменяются на противоположные. Процесс переходит к этапу S02, и схема 24 оценки границ полосы движения задает точку, в которой завершается смена полосы движения, в соответствии со скоростью транспортного средства в момент, когда обнаруживается смена полосы движения. В частности, схема 24 оценки границ полосы движения задает время (Tc), когда завершается смена полосы движения, на основе времени, когда схема 25 обнаружения смены полосы движения обнаруживает смену полосы движения. Например, время, когда 2,5 секунды проходят с момента, когда схема 25 обнаружения смены полосы движения обнаруживает смену полосы движения, определяется в качестве времени (Tc), когда завершается смена полосы движения. Время (Tc), когда завершается смена полосы движения, необязательно строго оценивается. Продолжительность периода, в течение которого транспортное средство сменяет полосу движения, может задаваться равной достаточно длительному периоду времени. Требуется только уменьшать влияние на оценку контуров для границ полосы движения на первой периферической карте, и время (Tc), когда завершается смена полосы движения, может оцениваться с достаточной точностью посредством простого способа.
[0033] Процесс переходит к этапу S03, и схема 24 оценки границ полосы движения определяет то, задается или нет флаг продолжающейся смены полосы движения. Когда флаг продолжающейся смены полосы движения задается ("Да" на этапе S03), схема 24 оценки границ полосы движения определяет то, что транспортное средство сменяет полосу движения, а именно, смена полосы движения начата, но еще не завершена, и процесс переходит к этапу S04. Когда флаг продолжающейся смены полосы движения еще не задается ("Нет" на этапе S03), схема 24 оценки границ полосы движения определяет то, что транспортное средство не сменяет полосу движения, и процесс переходит к этапу S05.
[0034] Поскольку координаты Y характеристических точек FP полосы движения во время смены полосы движения варьируются, координаты Y характеристических точек FP полосы движения, обнаруженных до начала смены полосы движения, сдвигаются относительно координат Y характеристических точек FP полосы движения, обнаруженных после завершения смены полосы движения. Таким образом, на этапе S04, схема 24 оценки границ полосы движения формирует третью периферическую карту (фиг. 4C(a)), исключающую характеристические точки FP полосы движения, обнаруженные до времени (Tc), когда завершается смена полосы движения, из второй периферической карты, показанной на фиг. 4B. Когда текущее время превышает время (Tc) до завершения смены полосы движения, флаг продолжающейся смены полосы движения сбрасывается. После этого процесс переходит к этапу S05.
[0035] На этапе S05, схема 24 оценки границ полосы движения выбирает характеристические точки FP полосы движения, показанные на третьей периферической карте, на одномерной гистограмме вдоль оси Y, как показано на фиг. 4C(b). Когда флаг не задается, гистограмма формируется посредством использования второй периферической карты.
[0036] Процесс переходит к этапу S06, и схема 24 оценки границ полосы движения определяет неразрывность характеристических точек полосы движения из гистограммы. В частности, схема 24 оценки границ полосы движения обнаруживает пики на гистограмме (координаты Y) и группирует характеристические точки FP полосы движения на третьей периферической карте в расчете на пик, с тем чтобы извлекать группы граничных точек полосы движения.
[0037] Процесс переходит к этапу S07, и схема 24 оценки границ полосы движения подгоняет кривую, выраженную посредством дорожной модельной функции, к соответствующим группам граничных точек полосы движения, извлеченным на первой периферической карте, с тем чтобы оценивать соответствующие границы (SKa, SKb и SKc) полосы движения.
[0038] Как описано выше, первый вариант осуществления позволяет достигать следующих преимуществ.
[0039] Когда смена полосы движения транспортного средства 51 обнаруживается, схема 24 оценки границ полосы движения определяет неразрывность характеристических точек FP полосы движения, обнаруженных до завершения смены полосы движения, относительно характеристических точек FP полосы движения, обнаруженных после завершения смены полосы движения, с учетом величины смены полосы движения (величины смещения), с тем чтобы обнаруживать границы полосы движения на основе неразрывности характеристических точек FP полосы движения. Неразрывность характеристических точек FP полосы движения до и после смены полосы движения учитывается согласно величине перемещения (величине смены полосы движения) в направлении ширины транспортного средства, извлекаемой из смены полосы движения. Согласно первому варианту осуществления, неразрывность характеристических точек FP полосы движения определяется с учетом процесса "отсутствия учета характеристических точек FP полосы движения, обнаруженных до того, как завершается смена полосы движения". Соответственно, полоса движения может обнаруживаться без влияния посредством изменения расстояния между транспортным средством 51 и характеристическими точками FP полосы движения, извлекаемыми из смены полосы движения.
[0040] Схема 24 оценки границ полосы движения оценивает границы полосы движения в соответствии с неразрывностью характеристических точек FP полосы движения, обнаруженных после завершения смены полосы движения. Соответственно, границы полосы движения могут оцениваться при исключении влияния изменения поперечных позиций (координат Y) характеристических точек FP полосы движения до завершения смены полосы движения, в случае если величина перемещения (величина смены полосы движения) транспортного средства в направлении ширины транспортного средства, извлекаемая из смены полосы движения, не может оцениваться точно.
[0041] Схема 24 оценки границ полосы движения определяет неразрывность характеристических точек полосы движения в соответствии с частотой позиций характеристических точек полосы движения в направлении ширины транспортного средства. Схема 24 оценки границ полосы движения выражает характеристические точки полосы движения на периферической карте в качестве одномерной гистограммы, накопленной на оси Y в направлении ширины транспортного средства. Границы полос движения в силу этого могут обнаруживаться из пиков на гистограмме, с тем чтобы легко оценивать контур полосы движения в расчете на границу полосы движения.
[0042] Схема 24 оценки границ полосы движения задает период от момента, с которого начинается смена полосы движения, до момента, в который завершается смена полосы движения, в соответствии со временем, когда обнаруживается смена полосы движения транспортного средства 51. Согласно первому варианту осуществления, время, когда завершается смена полосы движения, задается в соответствии со временем, когда обнаруживается смена полосы движения транспортного средства 51. Соответственно, характеристические точки FP полосы движения, обнаруженные после того, как завершается смена полосы движения, могут указываться точно.
[0043] Второй вариант осуществления
Схема 24 оценки границ полосы движения согласно второму варианту осуществления корректирует, с помощью величины смены полосы движения, позиции (координаты Y) характеристических точек FP полосы движения в направлении ширины транспортного средства, обнаруженных до того, как начинается смена полосы движения. Схема 24 оценки границ полосы движения затем оценивает границы полосы движения на основе неразрывности характеристических точек полосы движения после коррекции. В частности, схема 24 оценки границ полосы движения обнаруживает границы полосы движения посредством комбинирования характеристических точек FP' полосы движения после коррекции и характеристических точек FP полосы движения, обнаруженных после того, как завершается смена полосы движения. Схема 24 оценки границ полосы движения исключает характеристические точки FP полосы движения, обнаруженные между началом и завершением смены полосы движения, способом, аналогичным первому варианту осуществления. Блочная конфигурация устройства 1 обнаружения полос движения является идентичной блочной конфигурации, показанной на фиг. 1, и ее иллюстрация и пояснения не приводятся в данном документе.
[0044] Фиг. 6A является видом, показывающим вторую периферическую карту, сформированную из первой периферической карты, показанной на фиг. 4A, как и в случае фиг. 4B. Схема 24 оценки границ полосы движения формирует вторую периферическую карту, показанную на фиг. 6A, из первой периферической карты, когда транспортное средство 51 сменяет полосу движения. Как показано на фиг. 6B(a), координаты Y характеристических точек FP полосы движения, обнаруженных до времени (Ts), когда начинается смена полосы движения, сдвигаются в направлении, противоположном направлению смены полосы движения, на величину, идентичную величине (OF) смены полосы движения. Соответственно, может смещаться величина (OF) смены полосы движения, включенная в координаты Y характеристических точек FP полосы движения, обнаруженных до времени (Ts), когда начинается смена полосы движения.
[0045] Дополнительно, характеристические точки FP полосы движения, обнаруженные от времени (Ts), когда начинается смена полосы движения, до времени (Tc), когда завершается смена полосы движения, исключаются из второй периферической карты, показанной на фиг. 6A. Схема 24 оценки границ полосы движения за счет этого формирует четвертую периферическую карту, как показано на фиг. 6B(a), из второй периферической карты, показанной на фиг. 6A.
[0046] Величина смещения (величина смены полосы движения) соответствует ширине полосы движения для одной полосы движения и может предварительно задаваться согласно средней ширине полосы движения. Схема 24 оценки границ полосы движения выполняет обработку смещения, с тем чтобы группировать характеристические точки полосы движения. Следовательно, небольшая ошибка между фактической шириной полосы движения и величиной смещения (величиной смены полосы движения) разрешается. Величина смещения (величина смены полосы движения) в силу этого предварительно определяется.
[0047] Как показано на фиг. 6B(b), схема 24 оценки границ полосы движения извлекает группы граничных точек полосы движения посредством использования пиков (координат Y) на гистограмме, сформированной из четвертой периферической карты. Как показано на фиг. 6B(a), координаты Y характеристических точек FP' полосы движения после коррекции практически соответствуют координатам Y характеристических точек FP полосы движения, обнаруженных после того, как завершается смена полосы движения. Таким образом, группы граничных точек полосы движения могут легко извлекаться посредством использования пиков (координат Y) на гистограмме, как и в случае, показанном на фиг. 3B.
[0048] После этого, как описано выше, схема 24 оценки границ полосы движения подгоняет кривую, выраженную посредством дорожной модельной функции, к соответствующим группам граничных точек полосы движения, с тем чтобы оценивать соответствующие границы (SKa, SKb и SKc) полосы движения.
[0049] Схема 24 оценки границ полосы движения задает время (Ts), когда начинается смена полосы движения, на основе времени, когда схема 25 обнаружения смены полосы движения обнаруживает смену полосы движения. Например, продолжительность периода, в течение которого транспортное средство сменяет полосу движения, может предварительно задаваться равной пяти секундам, и время, которое задается равным предварительно определенному времени (2,5 секунды) до обнаружения смены полосы движения посредством схемы 25 обнаружения смены полосы движения, может определяться в качестве времени (Ts), когда начинается смена полосы движения. Период, в течение которого транспортное средство сменяет полосу движения, и предварительно определенное время могут регулироваться в зависимости от ширины полосы движения, включенной в картографическую информацию, или скорости транспортного средства.
[0050] После этого ниже описывается другой пример способа обнаружения полос движения с использованием устройства 1 обнаружения полос движения, когда транспортное средство 51 сменяет полосу движения, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 5. Ниже приводится рабочий процесс, выполняемый посредством схемы 12 обнаружения полос движения, включенной в устройство 1 обнаружения полос движения. Обработка, показанная на фиг. 5, многократно выполняется в предварительно определенном цикле.
[0051] На блок-схеме последовательности операций способа, показанной на фиг. 5, этап S10 выполняется вместо этапа S02 на фиг. 2, и этапы S11 и S12 выполняются вместо этапа S04 на фиг. 2. Другие этапы S01, S03 и S05-S07 являются идентичными этапам на фиг. 2, и их пояснения не повторяются ниже.
[0052] На этапе S10, схема 24 оценки границ полосы движения задает точку, в которой начинается смена полосы движения, и точку, в которой завершается смена полосы движения, согласно скорости транспортного средства, когда обнаруживается смена полосы движения. В частности, схема 24 оценки границ полосы движения задает время (Ts), когда начинается смена полосы движения, и время (Tc), когда завершается смена полосы движения, на основе времени, когда схема 25 обнаружения смены полосы движения обнаруживает смену полосы движения. Например, схема 24 оценки границ полосы движения задает время 2,5 секунды до обнаружения смены полосы движения посредством схемы 25 обнаружения смены полосы движения в качестве времени (Ts), когда начинается смена полосы движения. Схема 24 оценки границ полосы движения задает время, когда 2,5 секунды проходят с момента, когда схема 25 обнаружения смены полосы движения обнаруживает смену полосы движения, в качестве времени (Tc), когда завершается смена полосы движения. Время (Ts), когда начинается смена полосы движения, необязательно строго оценивается. Продолжительность периода, в течение которого транспортное средство сменяет полосу движения, может задаваться равной достаточно длительному периоду времени. Требуется только уменьшать влияние на оценку контуров для границ полосы движения на первой периферической карте, и время (Ts) начала смены полосы движения может оцениваться с достаточной точностью посредством простого способа.
[0053] Когда флаг продолжающейся смены полосы движения задается ("Да" на этапе S03), процесс переходит к этапу S11. Поскольку координаты Y характеристических точек FP полосы движения во время смены полосы движения варьируются, координаты Y характеристических точек FP полосы движения, обнаруженных до начала смены полосы движения, сдвигаются относительно координат Y характеристических точек FP полосы движения, обнаруженных после завершения смены полосы движения.
[0054] Таким образом, на этапе S11, схема 24 оценки границ полосы движения исключает характеристические точки FP полосы движения, обнаруженные между временем (Ts), когда начинается смена полосы движения, и временем (Tc), когда завершается смена полосы движения, из второй периферической карты, показанной на фиг. 6A. Когда текущее время превышает время (Tc) до завершения смены полосы движения, флаг продолжающейся смены полосы движения сбрасывается.
[0055] Процесс переходит к этапу S12, и схема 24 оценки границ полосы движения сдвигает координаты Y характеристических точек FP полосы движения, обнаруженных до времени (Ts), когда начинается смена полосы движения, в противоположном направлении на величину, идентичную величине (OF) смены полосы движения, как показано на фиг. 6B(a). Соответственно, может смещаться величина (OF) смены полосы движения, включенная в координаты Y характеристических точек FP полосы движения, обнаруженных до времени (Ts), когда начинается смена полосы движения.
[0056] Процесс переходит к этапу S05, и схема 24 оценки границ полосы движения выбирает характеристические точки FP' полосы движения после коррекции, показанные на фиг. 6B(a), и характеристические точки FP полосы движения, обнаруженные после времени (Tc), когда завершается смена полосы движения, на одномерной гистограмме вдоль оси Y, как показано на фиг. 6B(b).
[0057] Процесс переходит к этапу S06, и схема 24 оценки границ полосы движения обнаруживает пики (координаты Y) на гистограмме, показанной на фиг. 6B(b), и группирует характеристические точки (FP, FP') полосы движения на четвертой периферической карте в расчете на пик, с тем чтобы извлекать группы граничных точек полосы движения. Процесс переходит к этапу S07, и схема 24 оценки границ полосы движения подгоняет кривую, выраженную посредством дорожной модельной функции, к соответствующим группам граничных точек полосы движения, извлеченным на первой периферической карте, с тем чтобы оценивать соответствующие границы (SKa, SKb и SKc) полосы движения.
[0058] Как описано выше, второй вариант осуществления позволяет достигать следующих преимуществ.
[0059] Когда смена полосы движения транспортного средства 51 обнаруживается, схема 24 оценки границ полосы движения определяет неразрывность характеристических точек FP полосы движения, обнаруженных до завершения смены полосы движения, относительно характеристических точек FP полосы движения, обнаруженных после завершения смены полосы движения, с учетом величины смены полосы движения (величины смещения), с тем чтобы обнаруживать границы полосы движения на основе неразрывности характеристических точек FP полосы движения. Неразрывность характеристических точек FP полосы движения до и после смены полосы движения учитывается согласно величине перемещения (величине смены полосы движения) в направлении ширины транспортного средства, извлекаемой из смены полосы движения. Согласно второму варианту осуществления, неразрывность характеристических точек FP полосы движения определяется с учетом процесса "отсутствия учета характеристических точек FP полосы движения, обнаруженных между началом и завершением смены полосы движения, и сдвига позиций характеристических точек FP полосы движения, обнаруженных до начала смены полосы движения, с учетом величины смещения". Соответственно, полоса движения может обнаруживаться без влияния посредством изменения расстояния между транспортным средством 51 и характеристическими точками FP полосы движения, извлекаемыми из смены полосы движения.
[0060] Расстояние между транспортным средством и характеристическими точками полосы движения изменяется на величину (OF) перемещения транспортного средства в направлении ширины транспортного средства вследствие смены полосы движения. Таким образом, расстояние между транспортным средством и характеристическими точками полосы движения корректируется на величину (OF) перемещения транспортного средства в направлении ширины транспортного средства. Соответственно, изменение обнаруженного расстояния, извлекаемое из смены полосы движения, может смещаться таким образом, что характеристические точки полосы движения непрерывно распределяются независимо от присутствия или отсутствия смены полосы движения, что упрощает оценку границ полосы движения.
[0061] Схема 24 оценки границ полосы движения задает период между началом и завершением смены полосы движения на основе времени, когда обнаруживается смена полосы движения транспортного средства 51. Согласно второму варианту осуществления, время (Ts), когда начинается смена полосы движения, и время (Tc), когда завершается смена полосы движения, задаются в соответствии со временем, когда обнаруживается смена полосы движения транспортного средства 51. Соответственно, характеристические точки FP полосы движения, обнаруженные до того, как начинается смена полосы движения, и характеристические точки FP полосы движения, обнаруженные после того, как завершается смена полосы движения, могут указываться точно.
[0062] Функции, описанные в соответствующих вариантах осуществления, могут реализовываться в одной или более схем обработки. Схема обработки включает в себя программируемое обрабатывающее устройство, к примеру, обрабатывающее устройство, включающее в себя электрическую схему. Такое обрабатывающее устройство включает в себя специализированную интегральную схему (ASIC), выполненную с возможностью выполнять функции, описанные в соответствующих вариантах осуществления, или традиционный схемный компонент.
[0063] Хотя соответствующие варианты осуществления проиллюстрированы с автономным устройством 1 обнаружения полос движения, включающим в себя датчик 10 обнаружения величины перемещения и датчик 11 обнаружения цели, устройство обнаружения полос движения может иметь клиент-серверную модель с использованием компьютерной сети через сеть беспроводной связи. В таком случае, транспортное средство 51 (клиент), включающее в себя датчик 10 обнаружения величины перемещения и датчик 11 обнаружения цели, соединяется с устройством обнаружения полос движения (сервером), например, через компьютерную сеть. Сервер, включающий в себя схему 12 обнаружения полос движения, как показано на фиг. 1, в силу этого может соединяться с датчиком 10 обнаружения величины перемещения и датчиком 11 обнаружения цели через компьютерную сеть. Устройство обнаружения полос движения в этом случае включает в себя главным образом схему 12 обнаружения полос движения (сервер) без включения датчика 10 обнаружения величины перемещения или датчика 11 обнаружения цели.
[0064] Хотя настоящее изобретение описывается выше со ссылкой на варианты осуществления, следует понимать, что настоящее изобретение не имеет намерение быть ограниченным вариантами осуществления, описанными выше, и различные модификации и улучшения должны быть очевидными для специалистов в данной области техники в пределах объема настоящего изобретения.
Список номеров ссылок
[0065] 1 - устройство обнаружения полос движения
10 - датчик обнаружения величины перемещения
11 - датчик обнаружения цели
12 - схема обнаружения полос движения
24 - схема оценки границ полосы движения
25 - схема обнаружения смены полосы движения
51 - транспортное средство
FP, FP' - характеристическая точка полосы движения
OF - величина смены полосы движения (величина смещения)
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ПОЛОС ДВИЖЕНИЯ | 2016 |
|
RU2725561C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2616538C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2633120C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2635280C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ КАПЕЛЬ ВОДЫ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ УСТРОЙСТВА ОБНАРУЖЕНИЯ КАПЕЛЬ ВОДЫ | 2013 |
|
RU2644518C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ, СПОСОБ ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2571368C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2012 |
|
RU2544775C1 |
| СПОСОБ ПОМОЩИ В ДВИЖЕНИИ И УСТРОЙСТВО ПОМОЩИ В ДВИЖЕНИИ | 2018 |
|
RU2776105C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2619724C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ И СПОСОБ ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2619059C2 |
Изобретение относится к способу и устройству обнаружения полос движения. Способ, осуществляющийся устройством обнаружения полос движения, включает шаги, на которых обнаруживают множество характеристических точек полосы движения, обнаруженных посредством датчика обнаружения цели, установленного в транспортном средстве. Когда обнаруживается смена полосы движения транспортного средства, способ корректирует характеристические точки полосы движения, обнаруженные до того, как начинается смена полосы движения, и обнаруживает границы полосы движения после того, как завершается смена полосы, посредством использования скорректированных характеристических точек полосы движения, обнаруженных и накопленных до того, как начинается, и после того, как завершается смена полосы движения. Обеспечивается корректное обнаружение полосы движения. 3 н. и 5 з.п. ф-лы. 10 ил.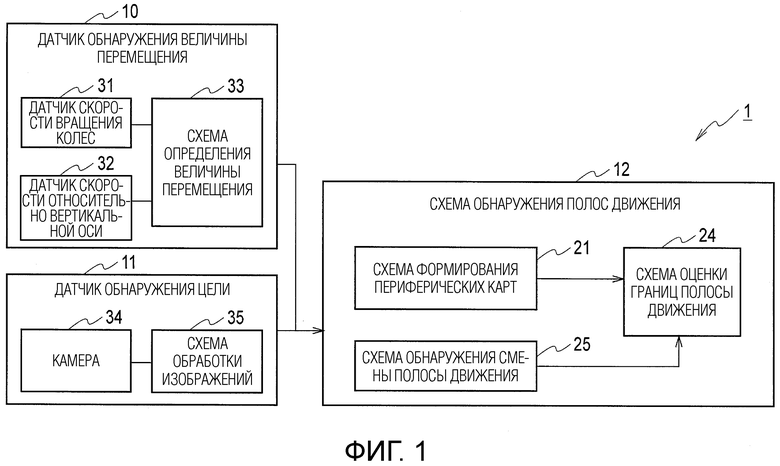
1. Способ обнаружения полос движения с использованием схемы обнаружения полос движения для накопления, согласно величине перемещения транспортного средства, множества характеристических точек полосы движения, обнаруженных посредством датчика обнаружения цели, установленного в транспортном средстве, с тем чтобы обнаруживать границы полосы движения согласно накопленным характеристическим точкам полосы движения,
причем схема обнаружения полос движения выполнена с возможностью, когда обнаруживается смена полосы движения транспортного средства, корректировать характеристические точки полосы движения, обнаруженные и накопленные до того, как начинается смена полосы движения, согласно величине перемещения транспортного средства в направлении ширины транспортного средства, извлекаемой из смены полосы движения, и обнаруживать границы полосы движения после того, как завершается смена полосы движения транспортного средства, посредством использования скорректированных характеристических точек полосы движения, обнаруженных и накопленных до того, как начинается смена полосы движения, и характеристических точек полосы движения, обнаруженных и накопленных после того, как завершается смена полосы движения.
2. Способ обнаружения полос движения по п. 1, в котором схема обнаружения полос движения группирует накопленные характеристические точки полосы движения согласно позиции транспортного средства в направлении ширины транспортного средства, обнаруживает границы полосы движения на основе сгруппированных и извлеченных характеристических точек полосы движения, группирует, из числа накопленных характеристических точек полосы движения, скорректированные характеристические точки полосы движения, обнаруженные и накопленные до того, как начинается смена полосы движения, и характеристические точки полосы движения, обнаруженные и накопленные после того, как завершается смена полосы движения, когда обнаруживается смена полосы движения, и обнаруживает границы полосы движения после того, как завершается смена полосы движения транспортного средства, согласно сгруппированным и извлеченным характеристическим точкам полосы движения.
3. Способ обнаружения полос движения по п. 1 или 2, в котором схема обнаружения полос движения перемещает позиции характеристических точек полосы движения в направлении ширины транспортного средства, обнаруженных до того, как начинается смена полосы движения, в направлении, противоположном направлению смены полосы движения, на величину, которая является идентичной величине перемещения транспортного средства в направлении ширины транспортного средства, извлекаемой из смены полосы движения, с тем чтобы использовать перемещенные характеристические точки полосы движения.
4. Способ обнаружения полос движения по любому из пп. 1, 2, в котором схема обнаружения полос движения не использует характеристические точки полосы движения, обнаруженные в течение периода от момента, с которого начинается смена полосы движения, до момента, в который завершается смена полосы движения.
5. Способ обнаружения полос движения по любому из пп. 1, 2, в котором схема обнаружения полос движения задает время, в которое начинается смена полосы движения, и время, в которое завершается смена полосы движения, согласно времени, когда обнаруживается смена полосы движения транспортного средства.
6. Устройство обнаружения полос движения, содержащее:
схему формирования периферических карт, выполненную с возможностью накапливать, согласно величине перемещения транспортного средства, множество характеристических точек полосы движения, обнаруженных посредством датчика обнаружения цели, установленного в транспортном средстве; и
схему оценки границ полосы движения, выполненную с возможностью обнаруживать границы полосы движения согласно накопленным характеристическим точкам полосы движения,
схема обнаружения полос движения выполнена с возможностью, когда обнаруживается смена полосы движения транспортного средства, корректировать характеристические точки полосы движения, обнаруженные и накопленные до того, как начинается смена полосы движения, согласно величине перемещения транспортного средства в направлении ширины транспортного средства, извлекаемой из смены полосы движения, и обнаруживать границы полосы движения после того, как завершается смена полосы движения транспортного средства, посредством использования скорректированных характеристических точек полосы движения, обнаруженных и накопленных до того, как начинается смена полосы движения, и характеристических точек полосы движения, обнаруженных и накопленных после того, как завершается смена полосы движения.
7. Способ обнаружения полос движения с использованием схемы обнаружения полос движения для накопления, согласно величине перемещения транспортного средства, множества характеристических точек полосы движения, обнаруженных посредством датчика обнаружения цели, установленного в транспортном средстве, с тем чтобы обнаруживать границы полосы движения согласно накопленным характеристическим точкам полосы движения,
причем схема обнаружения полос движения выполнена с возможностью, когда обнаруживается смена полосы движения транспортного средства, игнорировать характеристические точки полосы движения, обнаруженные и накопленные до того, как завершается смена полосы движения, и обнаруживать границы полосы движения после того, как завершается смена полосы движения транспортного средства, посредством использования характеристических точек полосы движения, обнаруженных и накопленных после того, как завершается смена полосы движения.
8. Способ обнаружения полос движения по п. 7, в котором схема обнаружения полос движения группирует накопленные характеристические точки полосы движения согласно позиции транспортного средства в направлении ширины транспортного средства, обнаруживает границы полосы движения на основе сгруппированных и извлеченных характеристических точек полосы движения, группирует, из числа накопленных характеристических точек полосы движения, характеристические точки полосы движения, обнаруженные и накопленные после того, как завершается смена полосы движения, когда обнаруживается смена полосы движения, и обнаруживает границы полосы движения после того, как завершается смена полосы движения транспортного средства, согласно сгруппированным и извлеченным характеристическим точкам полосы движения.
| US 6819779 B2, 16.11.2004 | |||
| US 8594380 B2, 26.11.2013 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ДОРОГИ, ФОРМЫ И ПОЛОЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ НА ДОРОГЕ, И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2012 |
|
RU2571871C2 |
| US 4819169 A, 04.04.1989. | |||

