ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к способу помощи в движении и устройству помощи в движении.
УРОВЕНЬ ТЕХНИКИ
[0002] Патентный Документ 1 раскрывает методику, согласно которой определяется наличие или отсутствие расхождения между информацией измерения в реальном мире, получаемой датчиком, и картой как опорной информацией относительно окружения.
СПИСОК ЦИТИРОВАНИЯ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003] Патентный Документ 1: Публикация находящейся на рассмотрении патентной заявки Японии №. 2017-181870
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004] Методика, раскрытая в Патентном Документе 1, не учитывает дорожную конфигурацию в диапазоне, в котором информация измерения и карта подлежат сопоставлению. Если конкретные характеристики, касающиеся дорожной конфигурации, отсутствуют, например, когда дорожная конфигурация в диапазоне, подлежащем сопоставлению, включает в себя лишь прямую форму или изогнутую форму, обладающую постоянной кривизной, может возникнуть разница в сопоставлении.
[0005] Настоящее изобретение обеспечивает способ помощи в движении и устройство помощи в движении, способные надлежащим образом выполнять сопоставление между конфигурационной информацией о дороге в картографических данных и конфигурационной информацией о дороге, обнаруживаемой датчиком.
ТЕХНИЧЕСКОЕ РЕШЕНИЕ
[0006] Аспектом настоящего изобретения является способ помощи в движении, включающий в себя обнаружение границы полосы движения, имеющейся вблизи транспортного средства, вычисление собственных позиций транспортного средства, преобразование системы координат обнаруженной границы полосы движения в систему координат, эквивалентную картографическим данным, хранящимся в запоминающем устройстве, в соответствии с собственными позициями, и интеграцию конфигурационной информации о границе полосы движения, включенной в картографические данные, с границей полосы движения, система координат которой преобразована, чтобы генерировать интегрированные данные, при этом интегрированный диапазон определяется, когда конфигурационная информация интегрируется с границей полосы движения, система координат которой преобразована, так что граница полосы движения включает в себя, по меньшей мере, либо множество частей, имеющих разную кривизну, либо множество прямых частей, направленных в разные направления, и конфигурационная информация соотносится с границей полосы движения, система координат которой преобразована, чтобы генерировать интегрированные данные с одновременным включением в состав, по меньшей мере, определенного интегрированного диапазона.
[0008] Цель и преимущества настоящего изобретения будут реализованы и достигнуты с помощью элементов и комбинаций, в частности изложенных в приложенной формуле изобретения. Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются иллюстративными и пояснительными и не ограничивают заявленное настоящее изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009]
[ФИГ. 1] ФИГ. 1 является схемой, иллюстрирующей пример схематичной конфигурации устройства помощи в движении согласно варианту осуществления настоящего изобретения.
[ФИГ. 2] ФИГ. 2 является пояснительной схемой примера обработки сопоставления.
[ФИГ. 3] ФИГ. 3 является пояснительной схемой примера результата сопоставления.
[ФИГ. 4] ФИГ. 4 является пояснительной схемой, иллюстрирующей пример обработки определения интегрированного диапазона.
[ФИГ. 5] ФИГ. 5 является пояснительной схемой, иллюстрирующей пример обработки вычисления угла в прямом направлении полосы движения.
[ФИГ. 6] ФИГ. 6 является пояснительной схемой, иллюстрирующей пример обработки вычисления угла в прямом направлении полосы движения.
[ФИГ. 7] ФИГ. 7 является графиком, иллюстрирующим распределение углов в прямом направлении полосы движения.
[ФИГ. 8] ФИГ. 8 является пояснительной схемой, иллюстрирующей пример обработки определения интегрированного диапазона.
[ФИГ. 9] ФИГ. 9 является графиком, иллюстрирующим распределение углов в прямом направлении полосы движения.
[ФИГ. 10] ФИГ. 10 является блок-схемой последовательности операций, иллюстрирующей пример способа помощи в движении согласно варианту осуществления настоящего изобретения.
[ФИГ. 11] ФИГ. 11 является блок-схемой последовательности операций, иллюстрирующей пример обработки определения интегрированного диапазона.
[ФИГ. 12] ФИГ. 12 является пояснительной схемой, иллюстрирующей пример обработки определения интегрированного диапазона.
[ФИГ. 13] ФИГ. 13 является пояснительной схемой, иллюстрирующей пример обработки определения интегрированного диапазона.
[ФИГ. 14] ФИГ. 14 является пояснительной схемой, иллюстрирующей пример обработки определения интегрированного диапазона.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0010] Вариант осуществления настоящего изобретения будет описан ниже со ссылкой на чертежи. Одинаковые или схожие элементы, упомянутые в нижеследующем описании чертежей, обозначаются одинаковыми или схожими позиционными обозначениями.
[0011] (Устройство помощи в движении)
Устройство помощи в движении согласно варианту осуществления настоящего изобретения может быть установлено на транспортном средстве (в дальнейшем транспортное средство, на котором установлено устройство помощи в движении согласно варианту осуществления настоящего изобретения, упоминается как «основное (host) транспортное средство»). Как показано на ФИГ. 1, устройство 1 помощи в движении согласно варианту осуществления настоящего изобретения включает в себя запоминающее устройство 2, приемник 3 системы глобального позиционирования (GPS) (датчик GPS), датчик 4 транспортного средства, датчик 5 периферии, схему 6 обработки, дисплей 7, устройство 8 управления транспортным средством и исполнительный механизм 9. Схема 6 обработки может осуществлять связь с запоминающим устройством 2, приемником 3 GPS, датчиком 4 транспортного средства, датчиком 5 периферии, дисплеем 7 и устройством 8 управления транспортным средством, чтобы передавать и принимать данные и сигналы через шину сети контроллеров (CAN), например, проводным или беспроводным образом.
[0012] Запоминающее устройство 2 может быть, например, полупроводниковой памятью, магнитной памятью или оптической памятью. Запоминающее устройство 2 может быть установлено в схеме 6 обработки. Запоминающее устройство 2 включает в себя блок 10 хранения карт для хранения картографических данных. Устройство 1 помощи в движении согласно варианту осуществления настоящего изобретения интегрирует картографические данные, хранящиеся в блоке 10 хранения карт, с точечными данными, получаемыми датчиком 5 периферии. Картографические данные, хранящиеся в блоке 10 хранения карт, могут быть картографическими данными высокого разрешения (далее упоминаемыми просто как «карта высокого разрешения»).
[0013] Карта высокого разрешения подходит для автономного вождения. Карта высокого разрешения представляет собой картографические данные, имеющие более высокое разрешение, чем картографические данные для навигации (именуемые просто «навигационной картой»), и включает в себя информацию по каждой полосе движения, которая является более точной, чем информация по каждой дороге. Например, карта высокого разрешения включает в себя в качестве информации по каждой полосе движения информацию об узлах полосы движения, указывающую опорные точки на опорной линии полосы движения (например, центральной линии в полосе движения), и информацию о соединениях полосы движения, указывающую секционные аспекты полосы движения между соответствующими узлами полосы движения. Информация об узлах полосы движения включает в себя соответствующий идентификационный номер, позиционные координаты, количество соединений полосы движения, с которыми осуществляется соединение, и идентификационный номер соответствующих соединений полосы движения, с которыми осуществляется соединение. Информация о соединениях полосы движения включает в себя соответствующий идентификационный номер, тип полосы движения, ширину полосы движения, форму полосы движения, тип границы полосы движения, форму границы полосы движения и форму опорной линии полосы движения.
[0014] Карта высокого разрешения дополнительно включает в себя информацию об объектах на земле, такую как тип и позиционные координаты каждого объекта на земле, в том числе светофора, стоп-линии, знака, здания, телеграфного столба, бордюра и пешеходного перехода, имеющегося в полосе движения или вблизи нее, а также идентификационный номер каждого узла полосы движения и идентификационный номер каждого соединения полосы движения, соответствующего позиционным координатам каждого объекта на земле. Поскольку карта высокого разрешения включает в себя информацию об узлах и соединениях по каждой полосе движения, полоса движения на маршруте движения, по которой основное транспортное средство в настоящее время движется, может быть точно определена. Карта высокого разрешения включает в себя координаты, указывающие позицию каждой полосы движения в направлении продолжения и направлении ширины. Карта высокого разрешения также включает в себя координаты, указывающие позицию объекта в трехмерном пространстве (например, долготу, широту и высоту), и каждая полоса движения и каждый описанный выше объект на земле могут быть указаны соответствующими образами в трехмерном пространстве.
[0015] Карта высокого разрешения может включать в себя данные группы точек о составных точках (точках границы), составляющих, например, границы полосы движения. Картографические данные, интегрированные устройством 1 помощи в движении с данными о границах полосы движения, полученными датчиком 5 периферии, не обязательно являются картой высокого разрешения, и требуется лишь, чтобы картографические данные включали в себя данные группы точек о составных точках, составляющих границы полосы движения.
[0016] Базой данных для картографических данных можно управлять на сервере, извне устройства 1 помощи в движении, а обновленные разностные данные для картографических данных могут быть получены через телематику, например, для обновления картографических данных, хранящихся в блоке 10 хранения карт. В качестве альтернативы, картографическая информация может быть получена посредством телематики, такой как связь между транспортными средствами или связь между транспортным средством и дорожной инфраструктурой, в зависимости от позиции, в которой основное транспортное средство движется. Использование телематики устраняет необходимость хранения картографических данных, требующих большого объема данных, в основном транспортном средстве, чтобы сэкономить емкость памяти. Использование телематики также позволяет обновлять полученные картографические данные, чтобы точно распознавать фактические дорожные ситуации, такие как изменение дорожной структуры, а также наличие или отсутствие дорожных работ или строительства. Использование телематики также позволяет распознавать точную информацию, поскольку можно использовать картографические данные, генерируемые на основе данных, получаемых от множества других транспортных средств, отличных от основного транспортного средства.
[0017] Приемник 3 GPS принимает радиоволны от множества навигационных спутников, чтобы получить текущую позицию (собственную позицию) основного транспортного средства, и выводит полученную текущую позицию основного транспортного средства в схему 6 обработки. Приемник глобальной навигационной спутниковой системы (GNSS) может быть включен в состав вместо приемника 3 GPS.
[0018] Датчик 4 транспортного средства представляет собой датчик для обнаружения текущей позиции и состояния движения (поведения) основного транспортного средства. Датчик 4 транспортного средства может включать в себя датчик скорости, датчик ускорения, гиродатчик и датчик скорости рыскания, но тип и количество датчиков транспортного средства не ограничиваются вышеуказанным случаем. Датчик скорости может определять скорость согласно скорости вращения колеса основного транспортного средства для вывода определенной скорости в схему 6 обработки. Датчик ускорения может определять ускорение в продольном направлении и направлении ширины транспортного средства собственно основного транспортного средства, например, для вывода определенного ускорения в схему 6 обработки. Гиродатчик может определять угловую скорость основного транспортного средства для вывода определенной угловой скорости в схему 6 обработки. Датчик скорости рыскания, например, может определять угловую скорость вращения (скорость рыскания) относительно вертикальной оси, проходящей через точку центра тяжести основного транспортного средства, для вывода определенной скорости рыскания в схему 6 обработки.
[0019] Датчик 5 периферии представляет собой датчик для обнаружения окружения (окружающей обстановки) основного транспортного средства. Датчик 5 периферии может включать в себя камеру, радар и устройство связи, но тип и количество датчиков 5 периферии не ограничиваются вышеуказанным случаем. Камера, используемая в качестве датчика 5 периферии, может быть, например, CCD-камерой. Камера может быть монокулярной камерой или стереокамерой. Камера захватывает окружение основного транспортного средства, обнаруживает, в качестве данных об окружении основного транспортного средства на основе захваченных изображений, относительную позицию между основным транспортным средством и таким объектом, как другое транспортное средство, пешеход или велосипед, расстояние между каждым объектом и основным транспортным средством, а также дорожную структуру, такую как границы полосы движения (белые линии) или бордюры на дороге, и выводит обнаруженные данные об окружении в схему 6 обработки.
[0020] Радар, используемый в качестве датчика 5 периферии, может быть, например, радаром миллиметрового диапазона, ультразвуковым радаром или лазерным дальномером (LRF). Радар обнаруживает, в качестве данных об окружении основного транспортного средства, относительную позицию объекта относительно основного транспортного средства, расстояние между объектом и основным транспортным средством и относительную скорость между объектом и основным транспортным средством, и выводит обнаруженные данные об окружении в схему 6 обработки.
[0021] Устройство связи, используемое в качестве датчика 5 периферии, может принимать данные об окружении основного транспортного средства, в том числе собственную позицию основного транспортного средства, посредством, например, связи между транспортными средствами с другими транспортными средствами, связи между дорожной инфраструктурой и транспортным средством с устройством на стороне дороги, или связи с центром информации о дорожном движении, и выводить обнаруженные данные об окружении в схему 6 обработки. Каждый из приемника 3 GPS, датчика 4 транспортного средства и датчика 5 периферии, используемых в данном документе, может быть использован в качестве датчика, способного обнаруживать фактическую (реальную) дорожную структуру и подобное вблизи основного транспортного средства.
[0022] Схема 6 обработки представляет собой контроллер, такой как электронный блок управления (ECU), для выполнения арифметико-логических операций, необходимых для обработки помощи в движении для основного транспортного средства. Схема 6 обработки может включать в себя процессор, запоминающее устройство и интерфейс ввода-вывода. Процессор может быть центральным процессором (CPU), включающим в себя арифметико-логический блок (ALU), схему управления (устройство управления) и регистры различных типов, или микропроцессором, эквивалентным CPU. Запоминающее устройство, установленное в схеме 6 обработки или внешне подсоединенное к ней, может быть, например, полупроводниковой памятью или дисковым носителем, а также может включать в себя регистр, кэш-память и запоминающий носитель, такой как ROM или RAM, используемый в качестве основного запоминающего устройства. Процессор, включенный в схему 6 обработки, исполняет программу, предварительно сохраненную в запоминающем устройстве, чтобы побудить устройство 1 помощи в движении к исполнению описанной ниже обработки информации.
[0023] Например, схема 6 обработки может выводить руководящую информацию на основе картографических данных, хранящихся в блоке 10 хранения карт, с дисплея 7 или любого другого устройства представления информации, такого как динамик, для представления информации находящемуся внутри человеку. Схема 6 обработки может, например, выполнять помощь в движении для основного транспортного средства. Термин «помощь в движении» может относиться либо к полностью автоматизированному вождению, при котором основное транспортное средство двигается автономно без участия находящегося внутри человека (такого как водитель), либо к помощи при вождении для управления по меньшей мере одним из приведения в движение, торможения и рулевого управления. Термин «помощь в движении», используемый в данном документе, охватывает случай управления всем приведением в движение, торможением и рулевым управлением основного транспортного средства без участия находящегося внутри человека, а также случай управления по меньшей мере одним из приведения в движение, торможения и рулевого управления основного транспортного средства.
[0024] Схема 6 обработки при выполнении помощи в движении генерирует маршрут движения, по которому основному транспортному средству следует двигаться, в соответствии с картографическими данными, хранящимися в блоке 10 хранения карт. Маршрут движения включает в себя курс движения по каждой полосе движения в дополнение к маршруту движения по каждой дороге от текущей позиции основного транспортного средства до пункта назначения. Маршрут движения может включать в себя профиль управления движением, такой как профиль скорости. Например, схема 6 обработки точно определяет позицию основного транспортного средства в картографических данных и генерирует маршрут движения (курс движения), чтобы его можно было провести вдоль полосы движения, на основе позиции основного транспортного средства. Маршрут движения (курс движения) может быть сгенерирован, например, вдоль центра полосы движения.
[0025] Схема 6 обработки при генерировании маршрута движения обращается к картографическим данным, хранящимся в блоке 10 хранения карт, а также может получать высокоточную позиционную информацию об окружении от датчика 5 периферии. Таким образом, схема 6 обработки предпочтительно подготавливает, в дополнение к картографическим данным, интегрированные данные, в которых картографические данные интегрируются с данными об окружении, получаемыми от датчика 5 периферии, чтобы сгенерировать маршрут движения с использованием интегрированных данных. Схема 6 обработки выводит сгенерированный маршрут движения на устройство 8 управления транспортным средством.
[0026] Устройство 8 управления транспортным средством является ECU для выполнения управления движением для основного транспортного средства. Устройство 8 управления транспортным средством включает в себя процессор и периферийные компоненты, такие как запоминающее устройство. Процессором может быть, например, CPU или эквивалентный микропроцессор. Запоминающее устройство может включать в себя полупроводниковую память, магнитную память и оптическую память. Запоминающее устройство может включать в себя регистр, кэш-память и память, такую как ROM или RAM, используемую в качестве основного запоминающего устройства. Устройство 8 управления транспортным средством может быть реализовано посредством функциональной логической схемы, установленной в полупроводниковой интегральной схеме общего назначения. Например, устройство 8 управления транспортным средством может включать в себя программируемое логическое устройство (PLD), такое как программируемая вентильная матрица (FPGA).
[0027] Устройство 8 управления транспортным средством вычисляет величину управления исполнительного механизма 9 так, чтобы основное транспортное средство двигалось по маршруту движения, сгенерированному схемой 6 обработки. Устройство 8 управления транспортным средством отправляет вычисленную величину управления на исполнительный механизм 9. Исполнительный механизм 9 управляет движением основного транспортного средства в соответствии с сигналом управления, принимаемым от устройства 8 управления транспортным средством. Исполнительный механизм 9 может быть исполнительным механизмом приведения в движение, исполнительным механизмом тормоза и исполнительным механизмом рулевого управления. Исполнительный механизм приведения в движение может быть дроссельной заслонкой с электронным управлением, например, для регулирования степени открытия акселератора основного транспортного средства в соответствии с сигналом управления, принимаемым от устройства 8 управления транспортным средством. Исполнительным механизмом тормоза может быть гидравлическая схема, например, для управления тормозной операцией тормоза основного транспортного средства в соответствии с сигналом управления, принимаемым от устройства 8 управления транспортным средством. Исполнительный механизм рулевого управления управляет рулевым управлением основного транспортного средства в соответствии с сигналом управления, принимаемым от устройства 8 управления транспортным средством.
[0028] Дорожные ситуации, в которых действует устройство 1 помощи в движении согласно варианту осуществления настоящего изобретения, описаны ниже со ссылкой на ФИГ. 2 и ФИГ. 3. Как показано на ФИГ. 2, картографические данные хранят позиционные координаты множества составных точек P1, составляющих границу L1 полосы движения с одной стороны, определяющую полосу L0 движения, по которой движется основное транспортное средство 100, и позиционные координаты множества составных точек P2, составляющих границу L2 полосы движения с другой стороны, определяющую полосу L0 движения. Датчик 5 периферии обнаруживает границы полосы движения в реальном мире, соответствующие границам L1 и L2 полосы движения, когда основное транспортное средство 100 движется, чтобы обнаруживать позиционные координаты множества точек p1 обнаружения при обнаружении границы полосы движения в реальном мире, соответствующей границе L1 полосы движения, и позиционные координаты множества точек p2 обнаружения при обнаружении границы полосы движения в реальном мире, соответствующей границе L2 полосы движения. ФИГ. 2 указывает направление D0 движения вперед основного транспортного средства 100 и прямое направление D1 полосы L0 движения соответствующими стрелками.
[0029] Ниже приведен случай, когда предполагается выполнение соотнесения между составными точками P1 и P2 в качестве конфигурационной информации о границах L1 и L2 полосы движения в картографических данных и точками p1 и p2 обнаружения, обнаруживаемыми датчиком 5 периферии, посредством обработки сопоставления (сравнения), чтобы генерировать интегрированные данные в предопределенном интегрированном диапазоне (диапазоне сопоставления) A1. Полоса L0 движения в интегрированном диапазоне A1 в этом случае имеет дорожную конфигурацию, которая имеет простую прямую линию без каких-либо конкретных характеристик, что может привести к различию при упомянутом сопоставлении в прямом направлении D1 полосы L0 движения, поскольку данные в прямом направлении D1 полосы L0 движения не являются обязательными (binding). Затем предполагается, что составные точки P1 и P2 в картографических данных корректируются, чтобы уменьшить ошибку, например, относительно точек p1 и p2 обнаружения. Этот случай может привести к разрыву между границами L3 и L4 полосы движения, состоящими из составных точек P3 и P4, полученных после коррекции, и границами L5 и L6 полосы движения в реальном мире в диапазоне A2 после изменения дорожной конфигурации с прямой на искривленную, как показано на ФИГ. 3.
[0030] Как и в случае дорожной конфигурации с прямой линией, искривленная дорога, обладающая предопределенной кривизной, не имеет особых характеристик и приводит к различию при сопоставлении в прямом направлении полосы движения. Устройство 1 помощи в движении согласно варианту осуществления настоящего изобретения может определять надлежащий интегрированный диапазон при генерировании интегрированных данных, в том числе выполнять обработку сопоставления с учетом характеристик дорожной конфигурации, избегая при этом различия при сопоставлении, чтобы надлежащим образом генерировать интегрированные данные.
[0031] Как показано на ФИГ. 1, схема 6 обработки в устройстве 1 помощи в движении согласно варианту осуществления настоящего изобретения включает в себя логический блок, в качестве функциональных или физических аппаратных ресурсов, в том числе блок 11 вычисления собственной позиции, блок 12 распознавания границы, блок 13 определения интегрированного диапазона, блок 14 сопоставления, блок 15 интеграции и блок 16 вычисления маршрута движения. Блок 11 вычисления собственной позиции, блок 12 распознавания границы, блок 13 определения интегрированного диапазона, блок 14 сопоставления, блок 15 интеграции и блок 16 вычисления маршрута движения 11 могут реализовывать физическую логическую схему, которая может быть PLD, таким как, например FPGA, или функциональную логическую схему, эквивалентно установленную в полупроводниковой интегральной схеме общего назначения посредством обработки программного обеспечения.
[0032] Блок 11 вычисления собственной позиции, блок 12 распознавания границы, блок 13 определения интегрированного диапазона, блок 14 сопоставления, блок 15 интеграции и блок 16 вычисления маршрута движения могут быть реализованы посредством одного компонента аппаратного обеспечения, или каждый из них может быть реализован с помощью отдельного аппаратного обеспечения. Например, блок 11 вычисления собственной позиции, блок 12 распознавания границы, блок 13 определения интегрированного диапазона, блок 14 сопоставления, блок 15 интеграции и блок 16 вычисления маршрута движения могут быть реализованы в автомобильной навигационной системе, такой как автомобильная информационно-развлекательная (IVI) система, и устройство 8 управления транспортным средством может быть реализовано посредством системы помощи в движении, такой как усовершенствованная система помощи водителю (ADAS).
[0033] Блок 11 вычисления собственной позиции получает историю (последовательность точек) собственных позиций основного транспортного средства от приемника 3 GPS или через связь между транспортными средствами или связь между дорожной инфраструктурой и транспортным средством. Блок 11 вычисления собственной позиции может преобразовывать систему координат собственных позиций основного транспортного средства в реальном мире в ту же самую систему координат, что и у картографических данных, для вычисления собственных позиций основного транспортного средства в картографических данных. Например, позиционные координаты собственных позиций основного транспортного средства в реальном мире, получаемые от приемника 3 GPS, преобразуются в позиционные координаты в системе координат карты. Блок 11 вычисления собственной позиции может вычислять величину перемещения и направление перемещения основного транспортного средства на основе информации о транспортном средстве (информации одометрии), такой как скорость колеса и скорость рыскания основного транспортного средства, определяемой датчиком 4 транспортного средства, а именно вычислять историю собственных позиций посредством одометрии. Блок 11 вычисления собственной позиции может подвергать точки, составляющие историю собственных позиций, аппроксимации кривой, чтобы вычислить курс движения основного транспортного средства.
[0034] Блок 12 распознавания границы распознает границы полосы движения согласно данным об окружении, обнаруживаемым датчиком 5 периферии. Блок 12 распознавания границы распознает в качестве границ полосы движения отметки полосы движения, такие как, например, белые линии. Распознаваемые границы полосы движения могут быть любого типа, и требуется лишь, чтобы они были целями, включенными в качестве границ полосы движения в картографические данные. Например, блок 12 распознавания границы может распознавать такие конструкции, как боковые канавы, бордюры, ограждения и столбы, в качестве границы полосы движения.
[0035] Блок 12 распознавания границ также преобразует систему координат распознанных границ полосы движения в ту же самую систему координат, что и у картографических данных, в соответствии с собственными позициями, вычисляемыми блоком 11 вычисления собственной позиции. Например, блок 12 распознавания границ преобразует систему координат точек обнаружения границ полосы движения, которая представляет собой локальную систему координат, использующую собственные позиции в качестве начала координат, в систему координат карты, к которой относятся картографические данные, в соответствии с собственными позициями основного транспортного средства, получаемыми блоком 11 вычисления собственной позиции от приемника 3 GPS. Преобразованная цель не ограничивается системой координат карты, и система координат, например, может быть относительной системой координат, которая использует формат, обеспечивающий возможность позиционирования.
[0036] Например, как проиллюстрировано на ФИГ. 4, картографические данные хранят позиционные координаты множества составных точек P11, P12, P13, P14 и P15, составляющих границу L7 полосы движения с одной стороны, определяющую полосу L9 движения, по которой движется основное транспортное средство 100, и позиционные координаты множества составных точек P31, P32, P33, P34 и P35, составляющих границу L8 полосы движения с другой стороны. Предполагается, что пунктирные линии, указывающие соответствующие границы L7 и L8 полосы движения, получены путем интерполяции соответствующих составных точек P11-P15 и P31-P35 по кривым. ФИГ. 4 определяет направление X, в котором направление на восток в направлении восток-запад в системе координат карты является положительным направлением, и определяет направление Y, в котором направление на север в направлении север-юг в системе координат карты является положительным направлением.
[0037] Граница L7 полосы движения имеет часть (прямую часть) L71, проходящую в прямом направлении D2 полосы L9 движения, часть (искривленную часть) L72, соединенную с прямой частью L71 и искривленную влево, и часть (прямую часть) L73, соединенную с искривленной частью L72 и проходящую в прямом направлении D3 полосы L9 движения, ортогональном прямому направлению D2. Граница L8 полосы движения имеет часть (прямую часть) L81, проходящую в прямом направлении D2, часть (искривленную часть) L82, соединенную с прямой частью L81 и искривленную влево, и часть (прямую часть) L83, соединенную с искривленной частью L82 и проходящую в прямом направлении D3, ортогональном прямому направлению D2.
[0038] Датчик 5 периферии обнаруживает границы полосы движения в реальном мире, соответствующие границам L7 и L8 полосы движения, когда основное транспортное средство 100 движется. Блок 12 распознавания границы распознает границы полосы движения в реальном мире, соответствующие границам L7 и L8 полосы движения, согласно результату обнаружения, получаемому датчиком 5 периферии, и вычисляет позиционные координаты множества точек p11-p19 обнаружения при обнаружении границы полосы движения в реальном мире, соответствующей границе L7 полосы движения, и позиционные координаты множества точек p21-p29 обнаружения при обнаружении границы полосы движения в реальном мире, соответствующей границе L8 полосы движения. Хотя ФИГ. 4 иллюстрирует случай распознавания границ полосы движения в реальном мире, соответствующих паре границ L7 и L8 полосы движения, может распознаваться лишь граница полосы движения в реальном мире, соответствующая либо границе L7 полосы движения, либо границе L8 полосы движения. Хотя ФИГ. 4 иллюстрирует точки p11-p19 и p21-p29 обнаружения позади основного транспортного средства 100, границы L7 и L8 полосы движения могут быть обнаружены с передней и боковых сторон основного транспортного средства 100 во время движения для получения точек обнаружения.
[0039] Блок 13 определения интегрированного диапазона определяет интегрированный диапазон (диапазон сопоставления), когда конфигурационная информация о границах полосы движения, включенная в картографические данные, интегрируется с информацией о границах полосы движения, обнаруживаемых датчиком 5 периферии. Например, блок 13 определения интегрированного диапазона определяет интегрированный диапазон так, чтобы соответствующие границы полосы движения включали в себя множество частей, имеющих разные значения кривизны или радиусы кривизны. Например, каждый радиус кривизны может быть получен таким образом, чтобы искривленная часть каждой границы полосы движения аппроксимировалась дугой окружности, и каждая кривизна может быть получена как величина, обратная радиусу кривизны. Каждая из множества частей может быть либо прямой частью, либо искривленной частью. А именно, множество частей могут быть комбинацией двух или более искривленных частей, обладающих разной кривизной, или комбинацией прямой части и искривленной части.
[0040] Например, как показано на ФИГ. 4, кривизна соответствующих прямых частей L71 и L73 равна нулю, что отличается от кривизны искривленной части L72. Блок 13 определения интегрированного диапазона может определять интегрированный диапазон, чтобы он включал в себя две части L71 и L72 границы L7 полосы движения, или определять интегрированный диапазон, чтобы он включал в себя две части L72 и L73. В качестве альтернативы, блок 13 определения интегрированного диапазона может определять интегрированный диапазон, чтобы он включал в себя три части L71, L72 и L73 границы L7 полосы движения.
[0041] Блок 13 определения интегрированного диапазона может определять интегрированный диапазон, так что граница полосы движения включает в себя множество прямых частей, направленных в разные направления. В качестве альтернативы блок 13 определения интегрированного диапазона может определять интегрированный диапазон таким образом, чтобы граница полосы движения включала в себя множество прямых частей, образующих угол друг с другом, который больше или равен предопределенному пороговому значению (например, 30 градусов) и меньше или равен предопределенному пороговому значению (например, 90 градусов). Другими словами, блок 13 определения интегрированного диапазона может определять интегрированный диапазон так, чтобы граница полосы движения включала в себя множество прямых частей, образующих разные углы с предопределенным направлением (например, направление X на ФИГ. 4). Например, как показано на ФИГ. 4, блок 13 определения интегрированного диапазона может определять интегрированный диапазон так, чтобы граница L7 полосы движения включала в себя две прямые части L71 и L73, направленные в направления, ортогональные друг другу.
[0042] Например, блок 13 определения интегрированного диапазона точно определяет соответствующие составные точки, соответствующие соответствующим точкам обнаружения, полученным, когда датчик 5 периферии обнаруживает границы полосы движения, согласно данным группы точек о составных точках, составляющих соответствующие границы полосы движения в картографических данных. Составными точками могут быть составные точки, хранящиеся в картографических данных, или виртуальные составные точки, размеченные на кривой, посредством которой интерполируются соответствующие составные точки, сохраненные в картографических данных. Блок 13 определения интегрированного диапазона оценивает каждый угол, образованный между предопределенным направлением и прямым направлением полосы движения, в соответствующих точно определенных составных точках. Прямое направление полосы движения может быть получено, например, на основе положения в пространстве основного транспортного средства или информации о соединениях, включенной в картографические данные. Блок 13 определения интегрированного диапазона определяет интегрированный диапазон таким образом, чтобы изменение (variation) углов, оцененных в соответствующих составных точках, было больше или равно предопределенному пороговому значению. Изменение углов может быть получено таким образом, что получается различие между данными о соответствующих углах, оцененных в соответствующих составных точках, и средним значением, и соответствующие различия возводятся в квадрат для вычисления среднего значения, чтобы получить расхождение.
[0043] В качестве альтернативы, блок 13 определения интегрированного диапазона может точно определять составные точки, соответствующие соответствующим точкам обнаружения, полученным при обнаружении датчиком 5 периферии границ полосы движения, а затем интерполировать соответствующие составные точки по кривой, чтобы вычислить ближайшие точки на этой кривой относительно соответствующих точек обнаружения. Затем блок 13 определения интегрированного диапазона может оценивать каждый угол, образованный между предопределенным направлением и прямым направлением полосы движения в соответствующих ближайших точках, и определять интегрированный диапазон таким образом, чтобы изменение углов, оцененных в соответствующих ближайших точках, было больше или равно предопределенному пороговому значению.
[0044] Например, как показано на ФИГ. 4, блок 13 определения интегрированного диапазона выполняет поиск составных точек в картографических данных, соответствующих соответствующей точке с p11 по p19 и с p21 по p29 обнаружения, когда границы полосы движения обнаруживаются датчиком 5 периферии в пределах равного предопределенному значению расстояния от соответствующих точек с p11 по p19 и с p21 по p29 обнаружения. Затем блок 13 определения интегрированного диапазона точно определяет составные точки P11, P15, P31 и P35, соответствующие точкам p13, p17, p23 и p27 обнаружения.
[0045] Блок 13 определения интегрированного диапазона также интерполирует составные точки P11-P15, в том числе составные точки P11 и P15, по кривой L7, и интерполирует составные точки P31-P35, в том числе точно определенные составные точки P31 и P35, по кривой L8. Блок 13 определения интегрированного диапазона дополнительно вычисляет ближайшие точки P21-P27 в качестве виртуальных составных точек на кривой L7, соответствующие другим точкам p11, p12, p14, p15, p16, p18 и p19 обнаружения, в которых соответствующие составные точки точно не определены, и вычисляет ближайшие точки P41-P47 в качестве виртуальных составных точек на кривой L8, соответствующие другим точкам p21, p22, p24, p25, p26, p28 и p29 обнаружения.
[0046] Соответствующие позиционные координаты точек p11-p19 и p21-p29 обнаружения, составных точек P11-P15 и P31-P35, и ближайшей точки P21-P27 и P41-P47, а также информация о соотнесении между точками p11-p19 и p21-p29 обнаружения и каждой из составных точек P11-P15 и P31-P35 и ближайших точек P21-P27 и P41-P47 хранится, например, в блоке 10 хранения карт в запоминающем устройстве 2 и может быть использована по мере необходимости при расширении интегрированного диапазона.
[0047] Блок 13 определения интегрированного диапазона дополнительно оценивает каждый угол, образованный между предопределенным направлением и прямым направлением полосы движения, в соответствующих составных точках P11-P15 и ближайших точках P21-P27. Например, как показано на ФИГ. 5, когда направление X в составной точке P11 установлено равным нулю градусов, угол θ1 направления D2 движения вперед основного транспортного средства относительно направления X, измеряемый против часовой стрелки, составляет 180 градусов. Аналогичным образом, как показано на ФИГ. 6, угол θ2 направления D3 движения вперед основного транспортного средства относительно направления X в составной сточке P15, измеряемый против часовой стрелки, составляет 90 градусов. Соответствующие углы в составных точках P12-P14 и ближайших точках P21-P27 вычисляются аналогичным образом. Соответствующие углы в составных точках P31-P35 и ближайших точках P41-P47 также вычисляются аналогичным образом.
[0048] Блок 13 определения интегрированного диапазона устанавливает начальное значение интегрированного диапазона и определяет, является ли изменение (расхождение, variance) углов, оцененных в соответствующих составных точках и соответствующих ближайших точках в интегрированном диапазоне, равным предопределенному пороговому значению или превосходящим его. Когда изменение (расхождение) углов меньше предопределенного порогового значения, блок 13 определения интегрированного диапазона расширяет интегрированный диапазон до предопределенного порогового значения или больше, чтобы определить интегрированный диапазон. Например, когда интегрированный диапазон A1, показанный на ФИГ. 4, определяется таким образом, что граница L7 полосы движения включает в себя только прямую часть L71, а граница L8 полосы движения включает в себя только прямую часть L81, изменение d1 углов в составных точках P11 и P12 и ближайших точках P21-P24 в интегрированном диапазоне A1 является довольно малым, как показано на ФИГ. 7. Затем блок 13 определения интегрированного диапазона определяет, что изменение d1 углов меньше предопределенного порогового значения.
[0049] Таким образом, блок 13 определения интегрированного диапазона расширяет интегрированный диапазон A1, как показано на ФИГ. 8, так, чтобы граница L7 полосы движения включала в себя три части L71, L72 и L73, а граница L8 полосы движения включала в себя три части L81, L82 и L83. Таким образом, изменение d2 углов в соответствующих составных точках P11-P15 и ближайших точках P21-P27 в интегрированном диапазоне A1 увеличивается, как например показано на ФИГ. 9. Блок 13 определения интегрированного диапазона определяет, что изменение углов равно предопределенному порогу или больше, чтобы определить интегрированный диапазон A1, показанный на ФИГ. 8. Несмотря на то, что ФИГ. 8 иллюстрирует случай определения интегрированного диапазона A1 позади основного транспортного средства 100, интегрированный диапазон может быть определен с включением передней области впереди основного транспортного средства 100.
[0050] Например, когда точки обнаружения могут быть последовательно обнаружены датчиком 5 периферии, блок 13 определения интегрированного диапазона может оценивать каждый угол, образованный между предопределенным направлением и прямым направлением полосы движения, в соответствующих точках обнаружения. Затем блок 13 определения интегрированного диапазона может определять интегрированный диапазон таким образом, чтобы изменение (расхождение) углов, оцененных в соответствующих точках обнаружения, было больше или равно предопределенному пороговому значению.
[0051] Блок 14 сопоставления выполняет сопоставление (сравнение) между конфигурационной информацией о границах полосы движения, включенной в картографические данные, и информацией о границах полосы движения, обнаруживаемых датчиком 5 периферии, одновременно с этим включая по меньшей мере интегрированный диапазон, определяемый блоком 13 определения интегрированного диапазона. Сопоставление может быть выполнено традиционным способом, таким как итеративная ближайшая точка (ICP). Термин «сопоставление», используемый в данном документе, относится к процессу выполнения соотнесения между составными точками в конфигурационной информации о границах полосы движения, включенной в картографические данные, и точками обнаружения при обнаружении границ полосы движения датчиком 5 периферии (другими словами, определение комбинации точек обнаружения и составных точек, соответствующих упомянутым точкам обнаружения). Блок 14 сопоставления выводит информацию соотнесения (результат сопоставления), в которой точки обнаружения и составные точки соотнесены друг с другом.
[0052] Например, как показано на ФИГ. 8, блок 14 сопоставления выполняет соотнесение между составными точками P11 и P15 и ближайшими точками P21-P27 на границе L7 полосы движения, включенной в картографические данные, и точкой p11-p17 обнаружения, обнаруживаемой датчиком 5 периферии. Блок 14 сопоставления также выполняет соотнесение между составными точками P31 и P35 и ближайшими точками P41-P47 на границе L8 полосы движения, включенной в картографические данные, и точкой p21-p27 обнаружения, обнаруживаемой датчиком 5 периферии.
[0053] Блок 15 интеграции интегрирует информацию о границах полосы движения, обнаруживаемых датчиком 5 периферии и преобразуемых в ту же самую систему координат, что и у картографических данные, с конфигурационной информацией о границах полосы движения, включенной в картографические данные, в соответствии с результатом сопоставления, получаемым блоком 14 сопоставления, чтобы сгенерировать интегрированные данные. Используемый в данном документе термин «интеграция» относится к обработке интеграции данных о точках обнаружения, обнаруживаемых датчиком 5 периферии, с данными о составных точках в картографических данных в состоянии, в котором точки обнаружения, обнаруживаемые датчиком 5 периферии, и составные точки в картографических данных, объединенные посредством сопоставления, соотносятся друг с другом. Интегрированные данные могут быть использованы, например, при генерировании плана движения. Сгенерированные интегрированные данные сохраняются в блоке 10 хранения карт в запоминающем устройстве 2 или любом другом запоминающем устройстве.
[0054] Блок 15 интеграции может непосредственно интегрировать информацию о границах полосы движения, обнаруживаемых датчиком 5 периферии, с конфигурационной информацией о границах полосы движения, включенной в картографические данные, чтобы сгенерировать интегрированные данные, включающие в себя позиционные координаты точек обнаружения, обнаруженных датчиком 5 периферии, и позиционные координаты составных точек, включенных в картографические данные и соотнесенные с соответствующими точками обнаружения. В качестве альтернативы блок 15 интеграции может корректировать конфигурационную информацию о границах полосы движения, включенную в картографические данные, в соответствии с результатом сопоставления, полученным блоком 14 сопоставления, чтобы сгенерировать в качестве интегрированных данных скорректированную конфигурационную информацию о границах полосы движения и информацию о границах полосы движения, обнаруженных датчиком 5 периферии.
[0055] Блок 15 интеграции может оптимизировать позиционные координаты составных точек на границах полосы движения, включенных в картографические данные, чтобы минимизировать позиционную ошибку между составными точками на границах полосы движения, включенных в картографические данные, и точками обнаружения, обнаруженными датчиком 5 периферии. Например, блок 15 интеграции может вычислять сумму квадратов разностей (ошибок) между составными точками на границах полосы движения, включенных в картографические данные, и точками обнаружения, обнаруженными датчиком 5 периферии, чтобы минимизировать вычисленную сумму. Блок 15 интеграции может интегрировать данные, обнаруженные датчиком 5 периферии, с картографическими данными, чтобы минимизировать ошибку между данными всей группы точек для точек обнаружения, обнаруженных датчиком 5 периферии в пределах интегрированного диапазона, и данными всей группы точек для составных точек на границах полосы движения, включенных в картографические данные в интегрированном диапазоне.
[0056] Блок 15 интеграции смещает позиционные координаты составных точек P11 и P15 и ближайших точек P21-P27 на границе L7 полосы движения, включенной в картографические данные, как например показано на ФИГ. 8, на одинаковое расстояние в одном и том же направлении, чтобы вычислить величину смещения так, чтобы сумма позиционных ошибок была наименьшей, для того, чтобы совместить составные точки P11 и P15 и ближайшие точки P21-P27 на границе L7 полосы движения, включенной в картографические данные, с точками p11-p17 обнаружения, обнаруженными датчиком 5 периферии. Затем блок 15 интеграции корректирует (обновляет) позиционные координаты составных точек, включенных в картографические данные, хранящиеся в блоке 10 хранения карт, так, чтобы они были смещены на величину M смещения. Блок 15 интеграции может корректировать все составные точки, включенные в картографические данные, или корректировать только составные точки в пределах предопределенного диапазона вблизи основного транспортного средства.
[0057] Блок 13 определения интегрированного диапазона может повторно (многократно) определять интегрированный диапазон с предопределенными интервалами каждый раз, когда основное транспортное средство перемещается. Блок 14 сопоставления может повторно выполнять обработку сопоставления между точками обнаружения и составными точками в интегрированном диапазоне, определенном блоком 13 определения интегрированного диапазона, с предопределенными интервалами каждый раз, когда основное транспортное средство перемещается. Блок 15 интеграции может выполнять обработку интеграции, повторно корректируя картографические данные, например, используя результаты сопоставления, полученные блоком 14 сопоставления.
[0058] Блок 16 вычисления маршрута движения генерирует маршрут движения, по которому основное транспортное средство должно двигаться, в соответствии с интегрированными данными, сгенерированными блоком 15 интеграции. Блок 16 вычисления маршрута движения выводит сгенерированный маршрут движения на устройство 8 управления транспортным средством.
[0059] (Способ помощи в движении)
Пример работы (способа помощи в движении) устройства 1 помощи в движении согласно варианту осуществления настоящего изобретения описан ниже со ссылкой на блок-схему последовательности операций, показанную на ФИГ. 10.
[0060] На этапе S1 блок 11 вычисления собственной позиции вычисляет собственные позиции основного транспортного средства, получаемые от приемника 3 GPS и подобного. На этапе S2 блок 12 распознавания границы обнаруживает границы полосы движения, имеющиеся вблизи основного транспортного средства, в соответствии с данными об окружении, определяемыми датчиком 5 периферии. На этапе S3 блок 13 определения интегрированного диапазона преобразует систему координат границ полосы движения, обнаруженных блоком 12 распознавания границ, в ту же систему координат, что и у картографических данных.
[0061] На этапе S4 блок 13 определения интегрированного диапазона определяет интегрированный диапазон, используемый при интеграции конфигурационной информации о границах полосы движения, включенной в картографические данные, хранящиеся в блоке 10 хранения карт в запоминающем устройстве 2, с информацией о границах полосы движения, обнаруживаемых датчиком 5 периферии. Например, блок 13 определения интегрированного диапазона определяет интегрированный диапазон так, чтобы границы полосы движения включали в себя по меньшей мере множество частей, имеющих разные значения кривизны, или множество прямых частей, направленных в разные направления.
[0062] Пример обработки определения интегрированного диапазона на этапе S4 подробно описан ниже со ссылкой на блок-схему последовательности операций, показанную на ФИГ. 11. На этапе S41 блок 13 определения интегрированного диапазона вычисляет ближайшие точки на границах полосы движения в картографических данных относительно соответствующих точек обнаружения, полученных после обнаружения границ полосы движения. На этапе S42 блок 13 определения интегрированного диапазона вычисляет угол, образованный между предопределенным направлением и прямым направлением полосы движения, в соответствующих ближайших точках. На этапе S43 блок 13 определения интегрированного диапазона определяет, является ли изменение (расхождение) углов в соответствующих ближайших точках в интегрированном диапазоне равным предопределенному пороговому значению или превышающим его. Когда определено, что изменение (расхождение) углов меньше предопределенного порогового значения, процесс переходит на этап S44. Затем блок 13 определения интегрированного диапазона выполняет обработку расширения интегрированного диапазона в направлении, противоположном направлению движения вперед транспортного средства, и процесс возвращается к этапу S43. Когда изменение (расхождение) углов определено на этапе S43 как равное предопределенному пороговому значению или превышающее его, блок 13 определения интегрированного диапазона финализирует интегрированный диапазон, чтобы завершить обработку определения интегрированного диапазона на этапе S4.
[0063] Возвращаясь к ФИГ. 10. на этапе S5 блок 14 сопоставления выполняет обработку сопоставления между информацией о дорожной конфигурации, включенной в картографические данные, и информацией о дорожной конфигурации, обнаруженной датчиком 5 периферии и преобразованной в ту же самую систему координат, что и у картографических данных, с одновременным включением по меньшей мере интегрированного диапазона, определенного блоком 13 определения интегрированного диапазона. На этапе S6 в соответствии с результатом сопоставления, полученным блоком 14 сопоставления, блок 15 интеграции интегрирует информацию о дорожной конфигурации, включенную в картографические данные, с информацией о дорожной конфигурации, обнаруженной датчиком 5 периферии и преобразованной в ту же самую систему координат, что и у картографических данных, чтобы сгенерировать интегрированные данные. Блок 15 интеграции сохраняет сгенерированные интегрированные данные в блоке 10 хранения карт.
[0064] На этапе S7 блок 16 вычисления маршрута движения генерирует маршрут движения, по которому основное транспортное средство должно двигаться, в соответствии с интегрированными данными, сгенерированными блоком 15 интеграции. На этапе S8 устройство 8 управления транспортным средством приводит в действие исполнительный механизм 9, чтобы выполнить управление транспортным средством в отношении основного транспортного средства для побуждения основного транспортного средства двигаться по маршруту движения, сгенерированному блоком 16 вычисления маршрута движения.
[0065] На этапе S9 схема 6 обработки определяет, выключен ли переключатель зажигания (IGN) основного транспортного средства. Процесс завершается, когда определено, что переключатель зажигания выключен. Процесс возвращается на этап S1, когда определено, что переключатель зажигания еще не выключен.
[0066] (Эффекты варианта осуществления)
Согласно варианту осуществления настоящего изобретения блок 13 определения интегрированного диапазона определяет интегрированный диапазон так, чтобы границы полосы движения имели части, имеющие разную кривизну или направленные в разные направления, при интеграции конфигурационной информации о границах полосы движения, включенной в картографические данные, с информацией о границах полосы движения, обнаруженных датчиком 5 периферии, для генерации интегрированных данных. Блок 13 определения интегрированного диапазона соотносит и интегрирует конфигурационную информацию о границах полосы движения, включенную в картографические данные, с информацией о границах полосы движения, обнаруженных датчиком 5 периферии, чтобы сгенерировать интегрированные данные, с одновременным включением по меньшей мере определенного интегрированного диапазона.
[0067] Таким образом, блок 13 определения интегрированного диапазона может определять интегрированный диапазон надлежащим образом так, чтобы дорожная конфигурация полосы движения в интегрированном диапазоне имела определенные характеристики. Таким образом, точность обработки сопоставления между конфигурационной информацией о границах полосы движения, включенной в картографические данные, и информацией о границах полосы движения, обнаруженных датчиком 5 периферии, может быть повышена, что приводит в результате к надлежащему сопоставлению. Это обеспечивает возможность подходящего соотнесения между конфигурационной информацией о границах полосы движения, включенной в картографические данные, и информацией о границах полосы движения, обнаруженных датчиком 5 периферии, с одновременным выполнением точного совмещения по мере необходимости, чтобы надлежащим образом сгенерировать интегрированные данные.
[0068] Блок 13 определения интегрированного диапазона также определяет интегрированный диапазон так, чтобы соответствующие границы полосы движения включали в себя множество прямых частей, образующих разные углы с предопределенным направлением. Это может минимизировать различие при сопоставлении в прямом направлении полосы движения при сопоставлении в простой прямой полосе движения, чтобы соответственно повысить точность сопоставления.
[0069] Блок 13 определения интегрированного диапазона также вычисляет составные точки, соответствующие соответствующим точкам обнаружения, и оценивает соответствующие углы, образуемые между предопределенным направлением и прямым направлением полосы движения, в соответствующих составных точках, чтобы определять интегрированный диапазон таким образом, чтобы изменение (расхождение) оцененных углов было больше или равно предопределенному пороговому значению. Это может минимизировать различие при сопоставлении в прямом направлении полосы движения при сопоставлении в простой прямой полосе движения, чтобы соответственно повысить точность сопоставления.
[0070] Блок 13 определения интегрированного диапазона также вычисляет составные точки, соответствующие соответствующим точкам обнаружения, и интерполирует соответствующие составные точки по кривой, чтобы вычислять ближайшие точки на упомянутой кривой относительно точек обнаружения. Затем блок 13 определения интегрированного диапазона оценивает соответствующие углы, образуемые между предопределенным направлением и прямым направлением полосы движения, в соответствующих ближайших точках, чтобы определять интегрированный диапазон так, чтобы изменение углов было больше или равно предопределенному пороговому значению. Это обеспечивает возможность точного вычисления прямого направления полосы движения в соответствующих ближайших точках.
[0071] Блок 13 определения интегрированного диапазона также оценивает соответствующие углы, образуемые между предопределенным направлением и прямым направлением полосы движения в соответствующих точках обнаружения, чтобы определять интегрированный диапазон так, чтобы изменение (расхождение) в оцененных углах было больше или равно предопределенному пороговому значению. Оценка изменения (расхождения) углов в прямом направлении полосы движения в точках обнаружения, когда имеется возможность последовательного обнаружения точек обнаружения, например, может минимизировать разницу при сопоставлении в прямом направлении полосы движения после сопоставления по простой прямой дороге, чтобы соответственно повысить точность сопоставления.
[0072] Блок 13 определения интегрированного диапазона повторно определяет интегрированный диапазон, блок 14 сопоставления повторно выполняет сопоставление между точками обнаружения и составными точками в интегрированном диапазоне, определенном блоком 13 определения интегрированного диапазона, а блок 15 интеграции повторно корректирует картографические данные с использованием результата сопоставления каждый раз, когда основное транспортное средство перемещается. Поскольку коррекция картографических данных выполняется предварительно с использованием предыдущего результата сопоставления при выполнении сопоставления, составные точки, соответствующие соответствующим точкам обнаружения, могут быть обнаружены точно при определении интегрированного диапазона.
[0073] Блок 15 интеграции генерирует интегрированные данные, чтобы включать переднюю область впереди основного транспортного средства в прямом направлении за пределами интегрированного диапазона. Это позволяет предварительно сгенерировать интегрированные данные в области до того, как она будет достигнута основным транспортным средством, в дополнение к интегрированному диапазону, в котором блок 14 сопоставления выполняет сопоставление.
[0074] Устройство 1 помощи в движении согласно варианту осуществления настоящего изобретения может быть использовано для дорожных конфигураций различных типов. Ниже приводится случай, в котором предполагается, что полоса L9 движения искривлена под прямым углом, как показано на ФИГ. 12. Граница L7 полосы движения имеет прямую часть L71, проходящую в прямом направлении D2, и прямую часть L72, соединенную с прямой частью L71 и проходящую в прямом направлении D3, ортогональном прямому направлению D2. Граница L8 полосы движения имеет прямую часть L81, проходящую в прямом направлении D2, и прямую часть L82, соединенную с прямой частью L81 и проходящую в прямом направлении D3, ортогональном прямому направлению D2.
[0075] Каждая из прямых частей L71 и L72 на границе L7 полосы движения имеет нулевую кривизну, но они направлены в разные направления. Каждая из прямых частей L81 и L82 на границе L8 полосы движения имеет нулевую кривизну, но они направлены в разные направления. Затем блок 13 определения интегрированного диапазона определяет интегрированный диапазон A1 так, чтобы он включал в себя две прямые части L71 и L72 границы L7 полосы движения и две прямые части L81 и L82 границы L8 полосы движения. Блок 13 определения интегрированного диапазона может определять интегрированный диапазон A1 в соответствии только с информацией либо о границе L7 полосы движения, либо о границе L8 полосы движения.
[0076] (Первый модифицированный пример)
Первый модифицированный пример варианта осуществления настоящего изобретения проиллюстрирован ниже со случаем определения интегрированного диапазона в соответствии с изменением направлений движения вперед основного транспортного средства, когда блок 13 определения интегрированного диапазона определяет интегрированный диапазон.
[0077] Блок 11 вычисления собственной позиции последовательно выполняет обработку по выборке собственных позиций вдоль курса движения основного транспортного средства и вычисляет последовательность точек P51-P56, когда датчик 5 периферии может обнаруживать границы полосы движения, как проиллюстрировано, например, на ФИГ. 13.
[0078] Блок 13 определения интегрированного диапазона оценивает направление движения вперед основного транспортного средства 100 в соответствующих собственных позициях P51-P56, вычисленных блоком 11 вычисления собственной позиции. Например, блок 13 определения интегрированного диапазона может использовать положение в пространстве основного транспортного средства 100, полученное приемником 3 GPS, в качестве направления движения вперед основного транспортного средства. В качестве альтернативы, блок 13 определения интегрированного диапазона может интерполировать историю (последовательность точек) собственных позиций P51-P56 по кривой L10 и получать касательные к кривой L10 в соответствующих собственных позициях P51-P56, чтобы вычислять направления движения вперед основного транспортного средства 100. В качестве альтернативы, блок 13 определения интегрированного диапазона может вычислять направления движения вперед основного транспортного средства 100, используя информацию о полосе движения, к которой основное транспортное средство 100 принадлежит, когда информация о соединениях и подобное в картографических данных включает в себя информацию о полосе движения, например, форму и тип полосы движения, к которой принадлежит основное транспортное средство 100.
[0079] Блок 13 определения интегрированного диапазона определяет интегрированный диапазон таким образом, чтобы изменение (расхождение) направлений движения вперед основного транспортного средства 100 в соответствующей собственной позиции P51-P56 было больше или равно предопределенному пороговому значению.
[0080] Согласно первому модифицированному примеру варианта осуществления настоящего изобретения собственные позиции вычисляются при обнаружении границ полосы движения, а направления движения вперед основного транспортного средства оцениваются в соответствующих собственных позициях, чтобы определять интегрированный диапазон так, чтобы расхождение направлений движения вперед основного транспортного средства было больше или равно предопределенному пороговому значению. Поскольку первый модифицированный пример может обращаться к информации о собственных позициях с меньшим числом, чем число точек обнаружения, полученных при обнаружении границ полосы движения, различие при сопоставлении может быть минимизировано с меньшей вычислительной нагрузкой.
[0081] Обнаружение направлений движения вперед основного транспортного средства приемником 3 GPS может соответственно обеспечивать вычисление направлений движения вперед.
[0082] Вычисление направлений движения вперед основного транспортного средства посредством интерполяции собственных позиций основного транспортного средства по кривой для получения касательных к кривой соответственно обеспечивает возможность точного вычисления направлений движения вперед.
[0083] Вычисление направлений движения вперед основного транспортного средства с использованием информации о полосе движения, включенной в картографические данные, к которой принадлежит ведущее транспортное средство, без использования приемника 3 GPS, обеспечивает возможность точного вычисления направлений движения вперед, избегая при этом влияния изменения точности приемника 3 GPS.
[0084] (Второй модифицированный пример)
Второй модифицированный пример варианта осуществления настоящего изобретения проиллюстрирован ниже со случаем определения интегрированного диапазона в соответствии с изменением значений кривизны полосы движения, когда блок 13 определения интегрированного диапазона определяет интегрированный диапазон.
[0085] Например, блок 13 определения интегрированного диапазона точно определяет составные точки, соответствующие соответствующим точкам обнаружения, обнаруженным датчиком 5 периферии, в соответствии с составными точками, составляющими конфигурационную информацию о границах полосы движения, включенных в картографические данные, и оценивает кривизну или радиус кривизны полосы движения в соответствующих точно определенных составных точках. Например, получают радиус описанной окружности для позиционных координат целевой составной точки и позиционных координат двух составных точек, смежных с целевой составной точкой, чтобы вычислить радиус кривизны полосы движения в целевой составной точке. Блок 13 определения интегрированного диапазона определяет интегрированный диапазон таким образом, чтобы изменение значений кривизны или радиусов кривизны полосы движения в соответствующих составных точках было больше или равно предопределенному пороговому значению.
[0086] В качестве альтернативы, блок 13 определения интегрированного диапазона может точно определять составные точки, соответствующие соответствующим точкам обнаружения, обнаруженным датчиком 5 периферии, в соответствии с составными точками, составляющими конфигурационную информацию о границах полосы движения, включенных в картографические данные, интерполировать соответствующие точно определенные составные точки по кривой и вычислять ближайшие точки на этой кривой относительно точек обнаружения. Блок 13 определения интегрированного диапазона оценивает кривизну или радиус кривизны полосы движения в соответствующих вычисленных ближайших точках. Например, на основе позиционных координат целевой ближайшей точки и позиционных координат двух ближайших точек, смежных с целевой ближайшей точкой, блок 13 определения интегрированного диапазона может вычислять кривизну или радиус кривизны полосы движения в целевой ближайшей точке. Блок 13 определения интегрированного диапазона может определять интегрированный диапазон таким образом, чтобы изменение значений кривизны или радиусов кривизны полосы движения в соответствующих ближайших точках было больше или равно предопределенному пороговому значению.
[0087] Например, как показано на ФИГ. 8, блок 13 определения интегрированного диапазона вычисляет кривизну прямой части L71 в границе L7 полосы движения в составной точке P11 на границе L7 полосы движения как кривизну полосы L9 движения на основе позиционных координат ближайшей точки P22, составной точки P11, а также ближайшей точки P23 на границе L7 полосы движения. Блок 13 определения интегрированного диапазона также вычисляет кривизну искривленной части L72 в границе L7 полосы движения в составной точке P13 на границе L7 полосы движения как кривизну полосы L9 движения на основе позиционных координат составных точек P12, P13 и P14 на границе L7 полосы движения.
[0088] Согласно второму модифицированному примеру варианта осуществления настоящего изобретения кривизна или радиус кривизны полосы движения оценивается в соответствующих составных точках, соответствующих точкам обнаружения, полученным при обнаружении границ полосы движения, так что интегрированный диапазон определяется таким образом, чтобы изменение (расхождение) значений кривизны или радиусов кривизны полосы движения было больше или равно предопределенному пороговому значению. Оценка изменения (расхождения) значений кривизны или радиусов кривизны полосы движения может минимизировать различие при сопоставлении в прямом направлении полосы движения, которое может быть вызвано сопоставлением, выполняемым только по кривой, обладающей постоянной кривизной или радиусом кривизны, чтобы соответственно повысить точность сопоставления.
[0089] Кроме того, соответствующие составные точки, соответствующие точкам обнаружения, полученным при обнаружении границ полосы движения, интерполируются с помощью кривой, ближайшие точки на этой кривой вычисляются относительно соответствующих точек обнаружения, а кривизна или радиус кривизны полосы движения оценивается в соответствующих ближайших точках, так что интегрированный диапазон определяется таким образом, что изменение (расхождение) значений кривизны или радиусов кривизны полосы движения больше или равно предопределенному пороговому значению. Это обеспечивает возможность точного вычисления значений кривизны или радиусов кривизны надлежащим образом.
[0090] (Третий модифицированный пример)
Третий модифицированный пример варианта осуществления настоящего изобретения проиллюстрирован ниже со случаем определения интегрированного диапазона в соответствии с изменением значений кривизны или радиусов кривизны курса движения основного транспортного средства, когда блок 13 определения интегрированного диапазона определяет интегрированный диапазон.
[0091] Блок 11 вычисления собственной позиции последовательно выполняет обработку по выборке собственных позиций вдоль курса движения основного транспортного средства и вычисляет последовательность точек P51-P56, когда датчик 5 периферии может обнаруживать границы полосы движения, как проиллюстрировано, например, на ФИГ. 13.
[0092] Блок 13 определения интегрированного диапазона оценивает кривизну или радиус кривизны курса движения основного транспортного средства в соответствующих вычисленных собственных позициях. Кривизна или радиус кривизны маршрута движения основного транспортного средства может быть вычислен согласно скорости рыскания, определенной датчиком скорости рыскания, который является датчиком 5 периферии, установленным на основном транспортном средстве. Например, радиус кривизны может быть вычислен в соответствии с выражением отношения R=V/Y, где V [м/с] - скорость основного транспортного средства, R [м] - радиус кривизны курса движения основного транспортного средства, а Y [рад/с] - скорость рыскания основного транспортного средства.
[0093] Блок 13 определения интегрированного диапазона может интерполировать последовательность точек в собственных позициях по кривой, чтобы вычислить кривизну или радиус кривизны курса движения основного транспортного средства. Когда информация о полосе движения, включенная в информацию о соединениях в картографических данных, включает в себя информацию о типе или форме полосы движения, блок 13 определения интегрированного диапазона может вычислять кривизну или радиус кривизны курса движения основного транспортного средства, используя информацию о полосе движения, к которой принадлежит транспортное средство.
[0094] Блок 13 определения интегрированного диапазона определяет интегрированный диапазон таким образом, чтобы изменение значений кривизны или радиусов кривизны курса движения основного транспортного средства в соответствующих собственных позициях было больше или равно предопределенному пороговому значению.
[0095] Согласно третьему модифицированному примеру варианта осуществления настоящего изобретения собственные позиции, полученные при обнаружении границ полосы движения, вычисляются последовательно, и кривизна курса движения основного транспортного средства оценивается в соответствующих собственных позициях так, чтобы определять интегрированный диапазон таким образом, чтобы изменение значений кривизны курса движения основного транспортного средства было больше или равно предопределенному пороговому значению. Поскольку третий модифицированный пример обращается к информации о собственных позициях с меньшим числом, чем число точек обнаружения, различие при сопоставлении может быть минимизировано с меньшей вычислительной нагрузкой.
[0096] Вычисление кривизны или радиуса кривизны курса движения основного транспортного средства на основе скорости рыскания, определенной датчиком скорости рыскания, который является датчиком 5 периферии, установленным на основном транспортном средстве, может обеспечить надлежащее вычисление кривизны или радиуса кривизны курса движения.
[0097] Вычисление кривизны или радиуса кривизны курса движения основного транспортного средства путем интерполяции последовательности точек в соответствующих собственных позициях с помощью кривой, обеспечивает возможность надлежащего вычисления кривизны или радиуса кривизны курса движения.
[0098] Вычисление кривизны или радиуса кривизны курса движения основного транспортного средства с использованием информации о полосе движения, включенной в картографические данные, к которой принадлежит основное транспортное средство, без использования приемника 3 GPS или датчика скорости рыскания, обеспечивает возможность точного вычисления кривизны или радиуса кривизны курса движения основного транспортного средства, избегая при этом влияния изменения точности приемника 3 GPS или датчика скорости рыскания.
[0099] (Четвертый модифицированный пример)
Четвертый модифицированный пример варианта осуществления настоящего изобретения проиллюстрирован ниже со случаем прореживания точек обнаружения или собственных позиций в интегрированном диапазоне, когда блок 13 определения интегрированного диапазона расширяет интегрированный диапазон.
[0100] Например, блок 13 определения интегрированного диапазона устанавливает интегрированный диапазон в качестве начальной настройки и расширяет этот интегрированный диапазон в направлении, противоположном направлению движения вперед основного транспортного средства (назад), когда границы полосы движения не включают множество частей, обладающих различными значениями кривизны, или множество прямых частей, направленных в разные направления, в установленном интегрированном диапазоне. Затем блок 13 определения интегрированного диапазона прореживает точки обнаружения или собственные позиции в интегрированном диапазоне. Интервалы прореживания могут быть определены надлежащим образом, и могут быть чередующимися точками или несколькими точками, или могут быть любым предопределенным расстоянием или нерегулярными интервалами. Обработка сопоставления блоком 14 сопоставления выполняется с использованием оставшихся точек обнаружения или собственных позиций без использования точек обнаружения или собственных положений, исключенных прореживанием, при обработке сопоставления.
[0101] Блок 13 определения интегрированного диапазона может изменять интервалы прореживания точек обнаружения или собственных позиций в зависимости от кривизны полосы движения в картографических данных. Например, блок 13 определения интегрированного диапазона увеличивает интервалы прореживания точек обнаружения или собственных позиций для более частого выполнения выборки по мере увеличения кривизны полосы движения (другими словами, по мере уменьшения радиуса кривизны полосы движения), поскольку предполагается, что дорожная конфигурация имеет значительные характеристики. Блок 13 определения интегрированного диапазона уменьшает интервалы прореживания точек обнаружения или собственных позиций для выполнения грубой выборки по мере уменьшения кривизны полосы движения (другими словами, по мере увеличения радиуса кривизны полосы движения).
[0102] В качестве альтернативы блок 13 определения интегрированного диапазона может изменять интервалы прореживания точек обнаружения или собственных позиций в зависимости от длины полосы движения в картографических данных. Например, блок 13 определения интегрированного диапазона уменьшает интервалы прореживания точек обнаружения или собственных позиций для выполнения грубой выборки по мере увеличения длины полосы движения, поскольку предполагается, что дорожная конфигурация имеет мало характеристик. Блок 13 определения интегрированного диапазона увеличивает интервалы прореживания точек обнаружения или собственных позиций для выполнения выборки более часто по мере уменьшения длины полосы движения.
[0103] Как показано на ФИГ. 4, например, интегрированный диапазон расширяется в направлении, противоположном направлению движения вперед основного транспортного средства 100 (назад) в интегрированном диапазоне A1 после начальной настройки, поскольку соответствующие границы L7 и L8 полосы движения включают в себя лишь одну прямую часть L71 или L81. Как показано на ФИГ. 8, когда интегрированный диапазон A1 расширяется, точки p12, p14, p16 и p18 обнаружения исключаются прореживанием из точек p11-p19 обнаружения на границе L7 полосы движения в чередующихся позициях. Точки p21-p29 обнаружения на границе L8 полосы движения также подвергаются обработке прореживания таким же образом, что и точки p11-p19 обнаружения на границе L7 полосы движения.
[0104] Согласно четвертому модифицированному примеру варианта осуществления настоящего изобретения обработка прореживания точек обнаружения или собственных позиций в интегрированном диапазоне при расширении может повысить эффективность обработки по сопоставлению, чтобы надлежащим образом уменьшить вычислительную нагрузку.
[0105] Изменение интервалов прореживания точек обнаружения или собственных позиций в зависимости от кривизны полосы движения в картографических данных, чтобы, например, уменьшить интервалы прореживания для грубого выполнения выборки, когда полоса движения является длинной и прямой и, таким образом, обладает конфигурацией полосы движения с небольшим количеством характеристик, может эффективно снизить вычислительную нагрузку без снижения точности сопоставления. Когда полоса движения искривлена с большой кривизной и, таким образом, имеет конфигурацию полосы движения со значительными характеристиками, интервалы прореживания увеличиваются для выполнения частой выборки с целью повышения точности сопоставления.
[0106] Изменение интервалов прореживания точек обнаружения или собственных позиций в зависимости от длины полосы движения в картографических данных, чтобы, например, выполнить более грубую выборку, когда полоса движения является длинной и прямой и, таким образом, обладает конфигурацией полосы движения с небольшим количеством характеристик, может эффективно снизить вычислительную нагрузку без снижения точности сопоставления.
[0107] Хотя настоящее изобретение было описано выше со ссылкой на определенный вариант осуществления, следует понимать, что настоящее изобретение не следует ограничивать приведенным описанием и чертежами, составляющими часть данного раскрытия. Различные альтернативные варианты осуществления, примеры и технические применения будут очевидны для специалистов в данной области техники согласно данному раскрытию.
[0108] Например, диапазон, в котором блок 15 интеграции генерирует интегрированные данные при интеграции конфигурационной информации о границах полосы движения, включенных в картографические данные, с информацией о границах полосы движения, обнаруженных датчиком 5 периферии, не ограничивается внутренней частью интегрированного диапазона. Блок 15 интеграции может интегрировать конфигурационную информацию о границах полосы движения, включенную в картографические данные, с информацией о границах полосы движения, обнаруживаемых датчиком 5 периферии в некотором диапазоне, включающем область за пределами интегрированного диапазона. Например, как показано на ФИГ. 14, блок 15 интеграции может генерировать интегрированные данные в диапазоне А3, включающем в себя, в дополнение к интегрированному диапазону А1, область, находящуюся впереди интегрированного диапазона А1 в направлении движения вперед основного транспортного средства 100. Это позволяет блоку 15 интеграции предварительно сгенерировать интегрированные данные в области, в которой точки обнаружения еще не получены, до того, как она будет достигнута основным транспортным средством.
[0109] Блок 15 интеграции может интегрировать всю конфигурационную информацию о границах полосы движения, включенную в картографические данные в интегрированном диапазоне, со всей информацией о границах полосы движения, обнаруженных датчиком 5 периферии. В качестве альтернативы, блок 15 интеграции может интегрировать часть конфигурационной информации о границах полосы движения, включенной в картографические данные в интегрированном диапазоне, со всей информацией о границах полосы движения, обнаруженных датчиком 5 периферии. В качестве альтернативы, блок 15 интеграции может осуществлять интеграцию всей конфигурационной информации о границах полосы движения, включенной в картографические данные в интегрированном диапазоне, с частью информации о границах полосы движения, обнаруженных датчиком 5 периферии.
[0110] Все примеры и условные формулировки, представленные в данном документе, предназначены для педагогических целей, чтобы помочь читателю понять изобретение и концепции, внесенные изобретателем в развитие данной области техники, и они не должны рассматриваться как ограничения такими конкретно перечисленными примерами и условиями, а организация таких примеров в описании не связана с демонстрацией превосходства или неполноценности данного изобретения. Хотя один или несколько вариантов осуществления настоящего изобретения были описаны подробно, следует понимать, что в изобретение могут быть внесены различные изменения, замены и модификации, не выходящие за рамки сущности и объема данного изобретения.
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
[0111]
1 УСТРОЙСТВО ПОМОЩИ В ДВИЖЕНИИ
2 ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО
3 ПРИЕМНИК СИСТЕМЫ ГЛОБАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ
4 ДАТЧИК ТРАНСПОРТНОГО СРЕДСТВА
5 ДАТЧИК ПЕРИФЕРИИ
6 СХЕМА ОБРАБОТКИ
7 ДИСПЛЕЙ
8 УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
9 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ
10 БЛОК ХРАНЕНИЯ КАРТ
11 БЛОК ВЫЧИСЛЕНИЯ СОБСТВЕННОЙ ПОЗИЦИИ
12 БЛОК РАСПОЗНАВАНИЯ ГРАНИЦЫ
13 БЛОК ОПРЕДЕЛЕНИЯ ИНТЕГРИРОВАННОГО ДИАПАЗОНА
14 БЛОК СОПОСТАВЛЕНИЯ
15 БЛОК ИНТЕГРАЦИИ
16 БЛОК ВЫЧИСЛЕНИЯ МАРШРУТА ДВИЖЕНИЯ
100 ОСНОВНОЕ ТРАНСПОРТНОЕ СРЕДСТВО

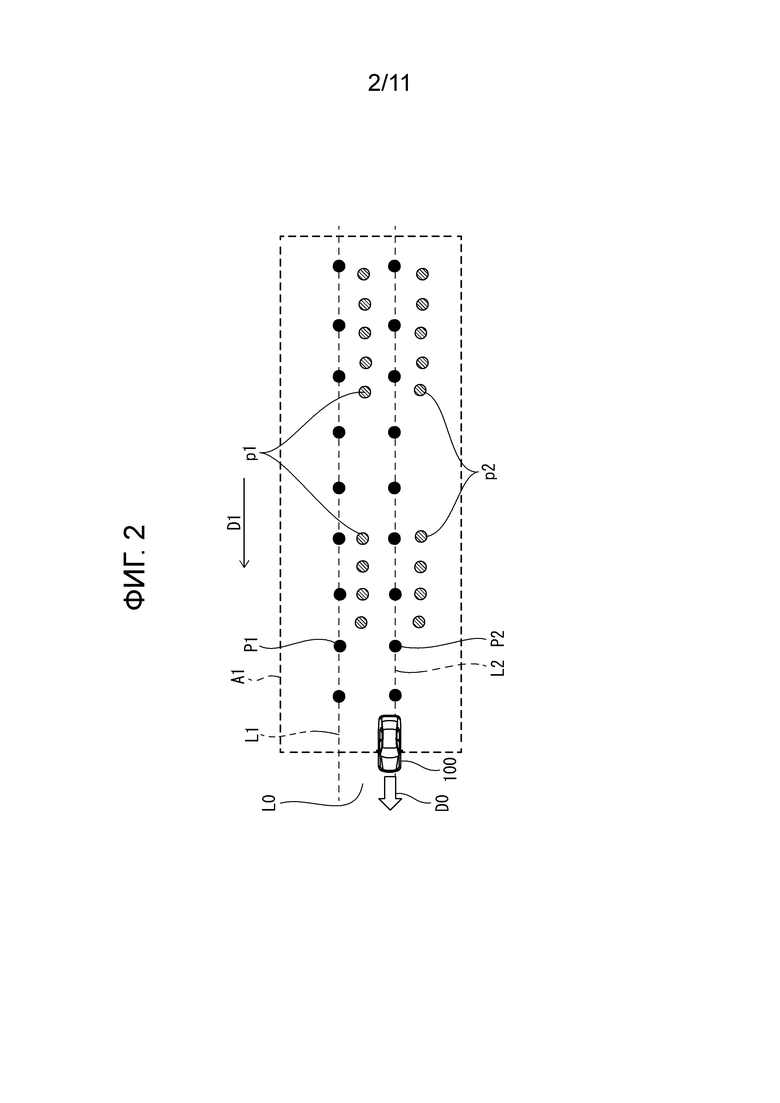








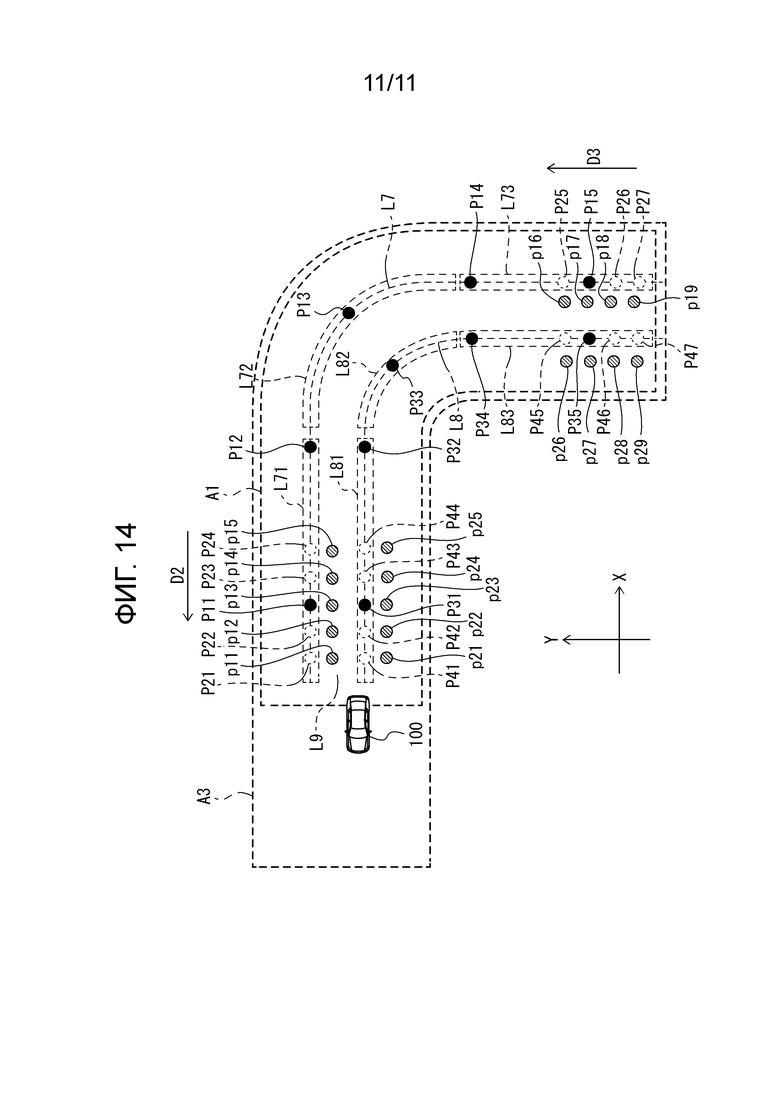
Настоящее изобретение относится к способу помощи в движении и устройству помощи в движении. Способ помощи в движении побуждает датчик к обнаружению границы полосы движения, имеющейся вблизи транспортного средства, вычисляет собственные позиции транспортного средства, преобразует систему координат обнаруженной границы полосы движения в систему координат, эквивалентную картографическим данным, хранящимся в запоминающем устройстве, в соответствии с собственными позициями. Затем интегрируют конфигурационную информацию о границе полосы движения, включенную в картографические данные, с границей полосы движения, система координат которой преобразована, чтобы генерировать интегрированные данные. При этом интегрированный диапазон определяется, когда конфигурационная информация интегрируется с границей полосы движения, система координат которой преобразована, так что граница полосы движения включает в себя, по меньшей мере, либо множество частей, имеющих разную кривизну, либо множество прямых частей, направленных в разные направления, и конфигурационная информация соотносится с границей полосы движения, система координат которой преобразована, чтобы генерировать интегрированные данные, в том числе, по меньшей мере, определенный интегрированный диапазон. Технический результат – обеспечение помощи в движении посредством выполнения сопоставления между конфигурационной информацией о дороге в картографических данных и конфигурационной информацией о дороге, обнаруживаемой датчиком. 2 н. и 19 з.п. ф-лы, 14 ил.
1. Способ помощи в движении, содержащий:
обнаружение границы полосы движения, имеющейся вблизи транспортного средства, посредством датчика;
получение собственных позиций транспортного средства;
преобразование системы координат границы полосы движения, обнаруженной датчиком, в систему координат, эквивалентную картографическим данным, хранящимся в запоминающем устройстве, в соответствии с собственными позициями; и
интеграцию конфигурационной информации о границе полосы движения, включенной в картографические данные, с границей полосы движения, система координат которой преобразована, чтобы генерировать интегрированные данные,
при этом диапазон сопоставления определяется так, чтобы граница полосы движения, система координат которой преобразована, включала в себя, по меньшей мере, либо множество частей, имеющих разную кривизну, либо множество прямых частей, направленных в разные направления, сопоставление выполняется между конфигурационной информацией и границей полосы движения, система координат которой преобразована, в пределах диапазона, включающего в себя по меньшей мере упомянутый диапазон сопоставления, а конфигурационная информация и граница полосы движения, система координат которой преобразована, интегрируются в соответствии с результатом сопоставления, чтобы сгенерировать интегрированные данные.
2. Способ помощи в движении по п. 1, в котором каждая из множества прямых частей образует с предопределенным направлением отличный друг от друга угол.
3. Способ помощи в движении по п. 2, дополнительно содержащий:
точное определение составных точек, составляющих конфигурационную информацию, которые соответствуют точкам обнаружения, полученным при обнаружении границы полосы движения;
оценку угла в соответствующих точно определенных составных точках, образованного между предопределенным направлением и прямым направлением полосы движения, определенной границей полосы движения; и
определение диапазона сопоставления таким образом, чтобы изменение углов было больше или равно предопределенному пороговому значению.
4. Способ помощи в движении по п. 2, дополнительно содержащий:
задание составных точек, составляющих конфигурационную информацию и соответствующих точкам обнаружения, полученным при обнаружении границы полосы движения;
интерполяцию соответствующих точно определенных составных точек по кривой;
вычисление ближайших точек на этой кривой относительно соответствующих точек обнаружения;
оценку угла в соответствующих вычисленных ближайших точках, образованного между предопределенным направлением и прямым направлением полосы движения, определенной границей полосы движения; и
определение диапазона сопоставления таким образом, чтобы изменение углов было больше или равно предопределенному пороговому значению.
5. Способ помощи в движении по п. 2, дополнительно содержащий:
оценку угла в точках обнаружения, полученных при обнаружении границы полосы движения, образованного между предопределенным направлением и прямым направлением полосы движения, определенной границей полосы движения; и
определение диапазона сопоставления таким образом, чтобы изменение углов было больше или равно предопределенному пороговому значению.
6. Способ помощи в движении по п. 1 или 2, дополнительно содержащий:
вычисление последовательности точек собственных позиций при обнаружении границы полосы движения;
оценку направления движения вперед транспортного средства в соответствующих собственных позициях; и
определение диапазона сопоставления таким образом, чтобы изменение направлений движения вперед транспортного средства было больше или равно предопределенному пороговому значению.
7. Способ помощи в движении по п. 6, дополнительно содержащий обнаружение направления движения вперед транспортного средства посредством приемника системы глобального позиционирования, установленного на транспортном средстве.
8. Способ помощи в движении по п. 6, дополнительно содержащий:
интерполяцию соответствующих собственных позиций по кривой; и
получение касательной к упомянутой кривой, чтобы вычислить направление движения вперед транспортного средства.
9. Способ помощи в движении по п. 6, дополнительно содержащий вычисление направления движения вперед транспортного средства посредством использования информации о полосе движения, к которой принадлежит транспортное средство, включенной в картографические данные.
10. Способ помощи в движении по п. 1, дополнительно содержащий:
задание составных точек, составляющих конфигурационную информацию, которые соответствуют точкам обнаружения, полученным при обнаружении границы полосы движения;
оценку кривизны полосы движения, определенной границей полосы движения, в соответствующих точно определенных составных точках; и
определение диапазона сопоставления таким образом, чтобы изменение значений кривизны было больше или равно предопределенному пороговому значению.
11. Способ помощи в движении по п. 1, дополнительно содержащий:
задание составных точек, составляющих конфигурационную информацию, которые соответствуют точкам обнаружения, полученным при обнаружении границы полосы движения;
интерполяцию соответствующих точно определенных составных точек по кривой;
вычисление ближайших точек на этой кривой относительно соответствующих точек обнаружения;
оценку кривизны полосы движения, определенной границей полосы движения, в соответствующих вычисленных ближайших точках; и
определение диапазона сопоставления таким образом, чтобы изменение значений кривизны полосы движения было больше или равно предопределенному пороговому значению.
12. Способ помощи в движении по п. 1, дополнительно содержащий:
вычисление последовательности точек собственных позиций при обнаружении границы полосы движения;
оценку кривизны курса движения транспортного средства в соответствующих собственных позициях; и
определение диапазона сопоставления таким образом, чтобы изменение значений кривизны курса движения транспортного средства было больше или равно предопределенному пороговому значению.
13. Способ помощи в движении по п. 12, дополнительно содержащий вычисление кривизны курса движения согласно скорости рыскания, определенной датчиком скорости рыскания, установленным на транспортном средстве.
14. Способ помощи в движении по п. 12, дополнительно содержащий интерполяцию последовательности точек собственных позиций по кривой, чтобы вычислить кривизну курса движения.
15. Способ помощи в движении по п. 12, дополнительно содержащий вычисление кривизны курса движения посредством использования информации о полосе движения, к которой принадлежит транспортное средство, включенной в картографические данные.
16. Способ помощи в движении по любому из пп. 1-15, дополнительно содержащий:
соотнесение конфигурационной информации с границей полосы движения, система координат которой преобразована, каждый раз, когда транспортное средство перемещается; и
повторное корректирование картографических данных посредством использования результата после соотнесения.
17. Способ помощи в движении по п. 1, дополнительно содержащий, при расширении диапазона сопоставления, прореживание точек обнаружения, полученных при обнаружении границы полосы движения в пределах диапазона сопоставления, или собственных позиций, полученных при обнаружении границы полосы движения.
18. Способ помощи в движении по п. 17, дополнительно содержащий изменение интервала прореживания в зависимости от кривизны полосы движения, определенной границей полосы движения, в пределах диапазона сопоставления.
19. Способ помощи в движении по п. 17 или 18, дополнительно содержащий изменение интервала прореживания в зависимости от длины полосы движения, определенной границей полосы движения, в пределах диапазона сопоставления.
20. Способ помощи в движении по любому из пп. 1-19, дополнительно содержащий генерирование интегрированных данных, чтобы включить переднюю область впереди транспортного средства в направлении движения вперед транспортного средства за пределами определенного диапазона сопоставления.
21. Устройство помощи в движении, содержащее:
датчик, выполненный с возможностью обнаружения границы полосы движения, имеющейся вблизи транспортного средства;
запоминающее устройство, выполненное с возможностью хранения картографических данных; и
контроллер, выполненный с возможностью получения собственных позиций транспортного средства, преобразования системы координат границы полосы движения, обнаруженной датчиком, в систему координат, эквивалентную картографическим данным, в соответствии с собственными позициями, и интеграции конфигурационной информации о границе полосы движения, включенной в картографические данные, с границей полосы движения, система координат которой преобразована, чтобы генерировать интегрированные данные,
причем контроллер выполнен с возможностью определения диапазона сопоставления так, чтобы граница полосы движения, система координат которой преобразована, включала в себя, по меньшей мере, либо множество частей, имеющих разную кривизну, либо множество прямых частей, направленных в разные направления, а также осуществления сопоставления между конфигурационной информацией и границей полосы движения, система координат которой преобразована, в пределах диапазона, включающего в себя по меньшей мере упомянутый диапазон сопоставления, и интеграции конфигурационной информации с границей полосы движения, система координат которой преобразована, в соответствии с результатом сопоставления, чтобы генерировать интегрированные данные.
| СИСТЕМА ОПРЕДЕЛЕНИЯ ОБНОВЛЕНИЯ КАРТ | 2016 |
|
RU2642547C1 |
| EP 3324152 A1, 23.05.2018 | |||
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ПОЛОСЫ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2572939C9 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2631543C1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

