Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу обнаружения полос движения и к устройству обнаружения полос движения.
Уровень техники
[0002] Известно устройство для того, чтобы обнаруживать полосу движения из изображения поверхности дороги (патентный документ 1). Устройство, раскрытое в патентном документе 1, формирует горизонтальную краевую гистограмму для множества краевых точек, проецируемых наоборот на координаты поверхности дороги. Устройство затем получает позиции пиков в краевой гистограмме и задает краевые точки, способствующие соответствующим позициям пиков, в группу, с тем чтобы обнаруживать разделительные линии.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Не прошедшая экспертизу патентная публикация (Япония) номер 2005-100000
Сущность изобретения
[0004] Тем не менее, число обнаруженных краевых точек может уменьшаться на обочине дороги, поскольку грязь имеет тенденцию прилипать к ней, или число обнаруженных краевых точек может уменьшаться по мере того, как расстояние от транспортного средства до краевых точек увеличивается. Устройство, раскрытое в патентном документе 1, в силу этого имеет такую проблему, что разделительные линии, параллельные между собой, нарисованные на полосе движения, могут оцениваться в состоянии непараллельности между собой.
[0005] С учетом вышеизложенной проблемы, настоящее изобретение предоставляет способ обнаружения полос движения и устройство обнаружения полос движения, допускающие стабильное обнаружение контуров границ полосы движения.
Решение задачи
[0006] Способ обнаружения полос движения согласно аспекту настоящего изобретения перекрывает множество групп граничных точек полосы движения, параллельных между собой, посредством перемещения в направлении ширины транспортного средства, извлеченных согласно неразрывности множества характеристических точек полосы движения, обнаруженных посредством датчика обнаружения цели, установленного в транспортном средстве, оценивает контур полосы движения согласно характеристическим точкам полосы движения, включенным в перекрывающиеся группы граничных точек полосы движения, и определяет границы полосы движения посредством перемещения оцененного контура полосы движения в направлении ширины транспортного средства.
Преимущества изобретения
[0007] Настоящее изобретение позволяет оценивать контуры полос движения при одновременном исключении характеристических точек полосы движения, принадлежащих ответвляющейся полосе движения и т.п., не параллельной другим полосам движения. Настоящее изобретение в силу этого позволяет стабильно обнаруживать контуры границ полосы движения.
Краткое описание чертежей
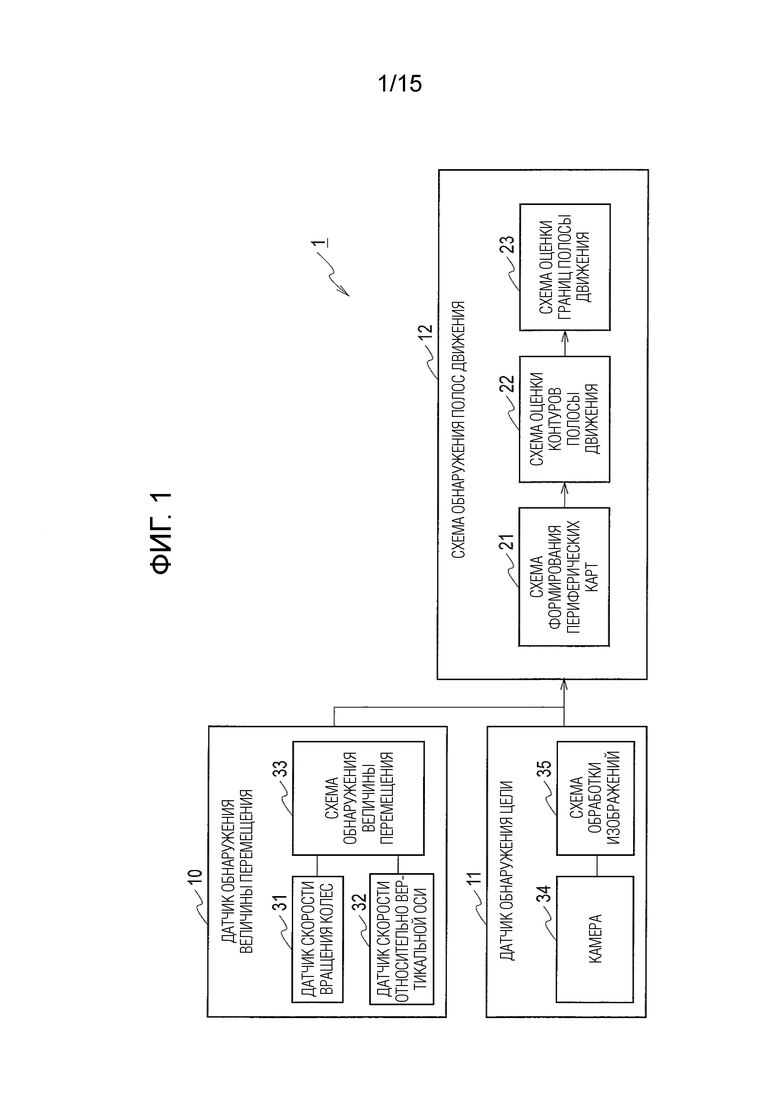
[0008] Фиг. 1 является блок-схемой, показывающей конфигурацию устройства 1 обнаружения полос движения согласно первому варианту осуществления.
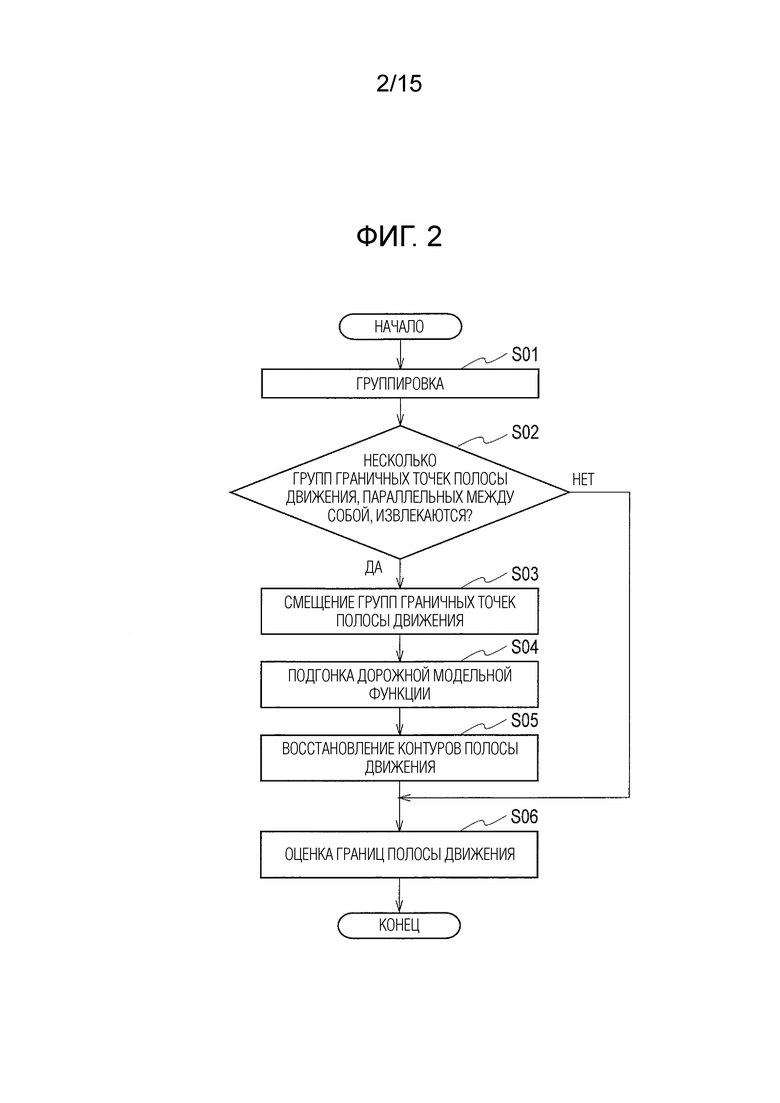
Фиг. 2 является блок-схемой последовательности операций, иллюстрирующей способ обнаружения полос движения с использованием устройства 1 обнаружения полос движения, показанного на фиг. 1.
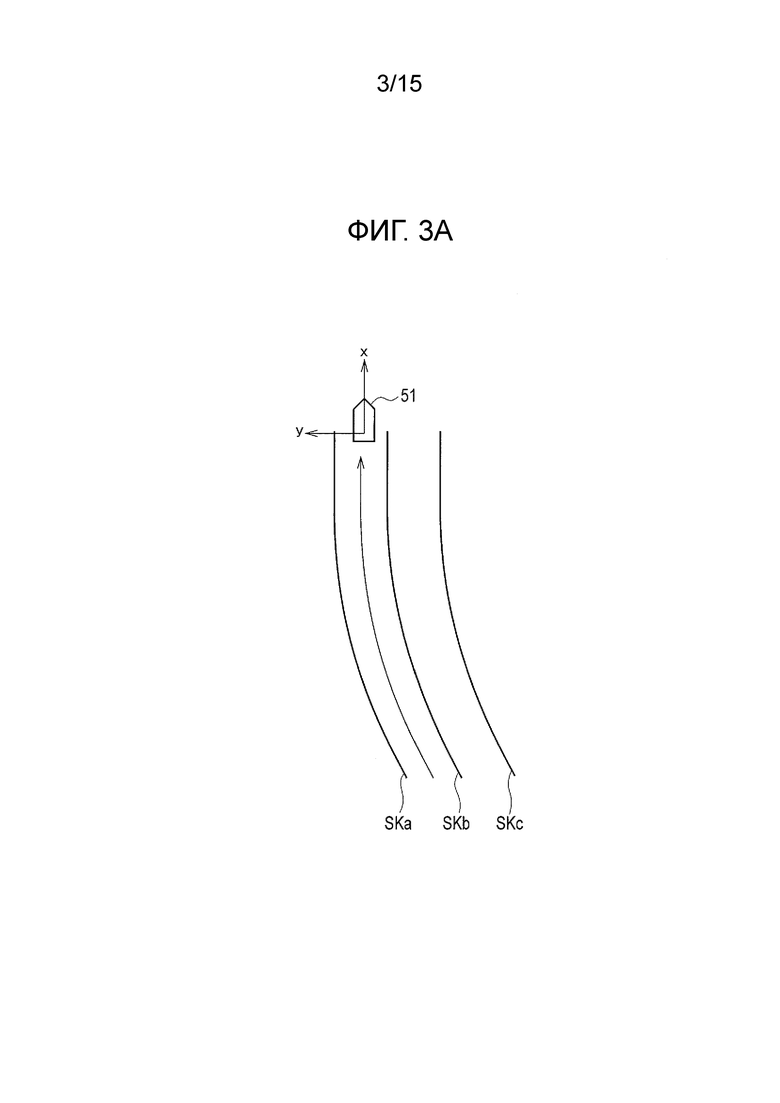
Фиг. 3A является видом "с высоты птичьего полета", показывающим состояние, в котором транспортное средство 51 движется на левой стороне двухполосной дороги, немного изгибающейся вправо.
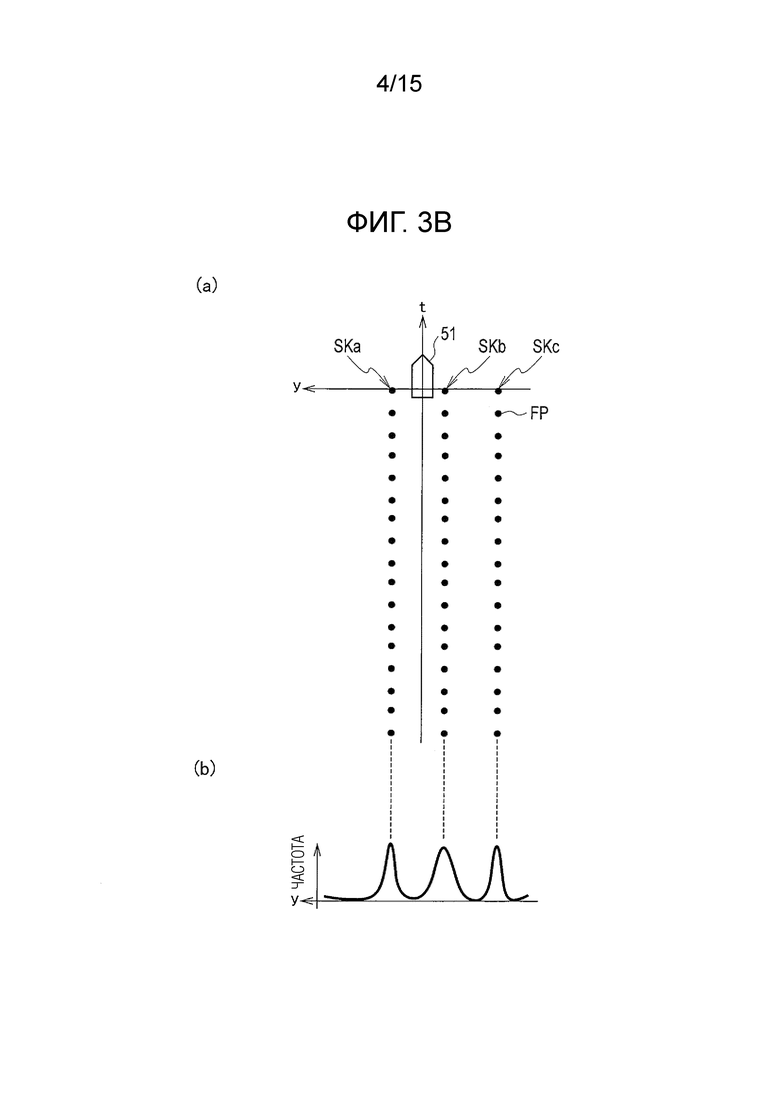
Фиг. 3B(a) является видом "с высоты птичьего полета", иллюстрирующим вторую периферическую карту, сформированную из первой периферической карты, показанной на фиг. 3A, и фиг. 3B(b) является графиком, иллюстрирующим гистограмму, сформированную из второй периферической карты на фиг. 3B(a).
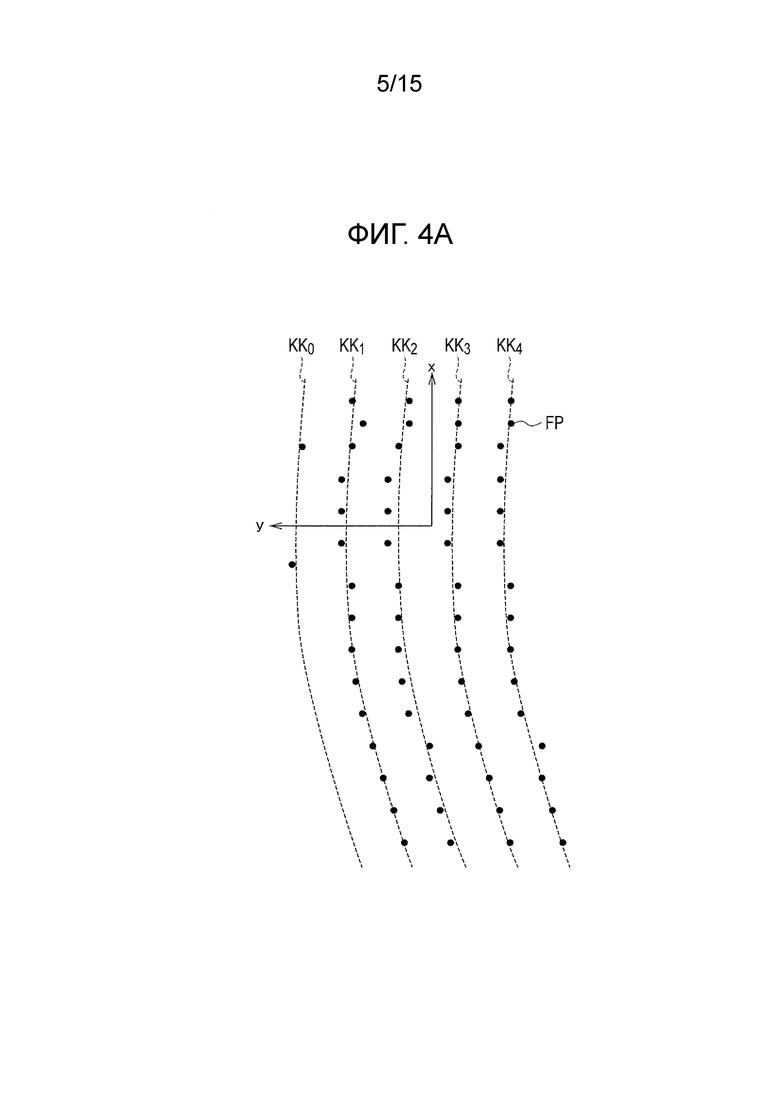
Фиг. 4A является видом "с высоты птичьего полета", показывающим пять дорожных модельных функций (KK0, KK1, KK2, KK3, KK4), подогнанных ко множеству групп граничных точек полосы движения, параллельных между собой, и характеристических точек FP полосы движения, включенных в соответствующие группы граничных точек полосы движения.
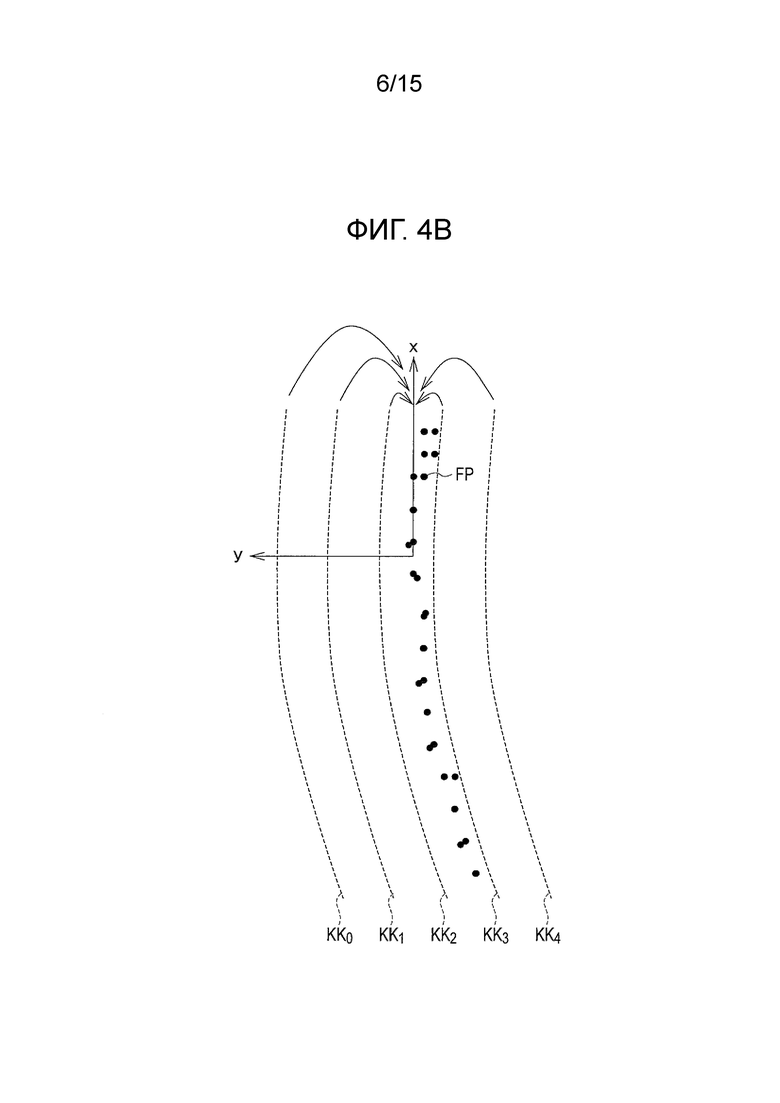
Фиг. 4B является видом "с высоты птичьего полета", показывающим состояние, в котором характеристические точки FP полосы движения, включенные в параллельные группы граничных точек полосы движения, перекрывают друг друга.
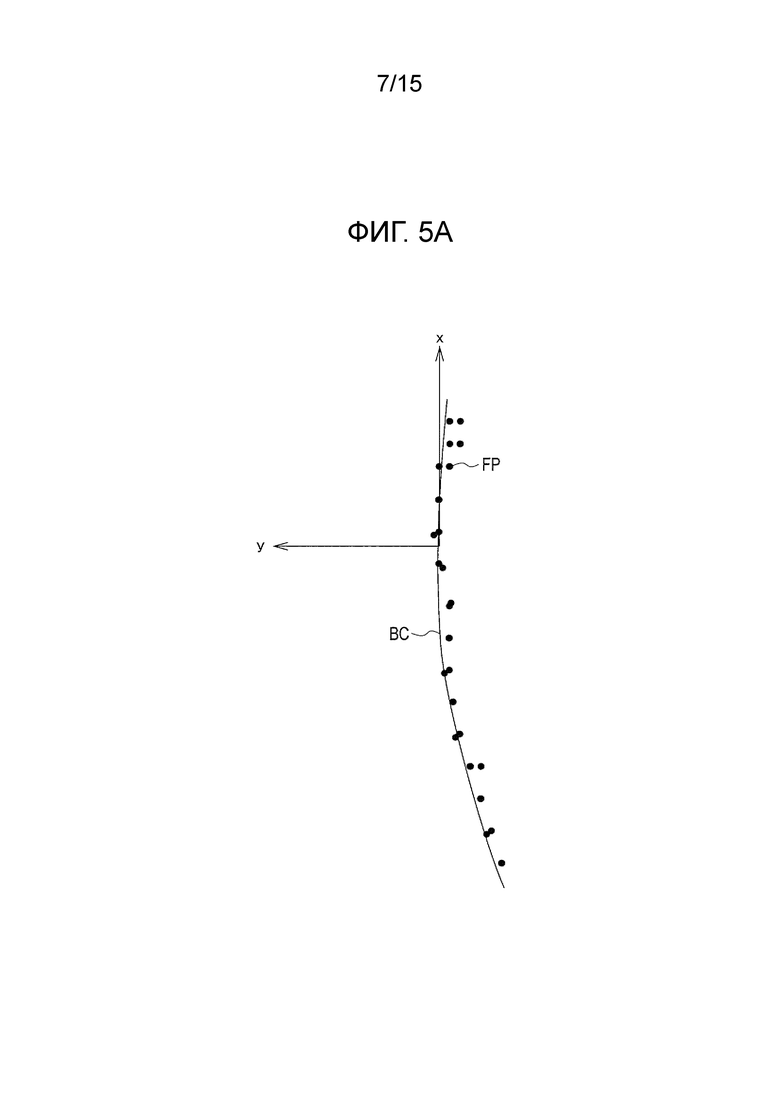
Фиг. 5A является видом "с высоты птичьего полета", показывающим контур BC полосы движения, оцененный согласно характеристическим точкам FP полосы движения, включенным в перекрывающиеся группы граничных точек полосы движения.
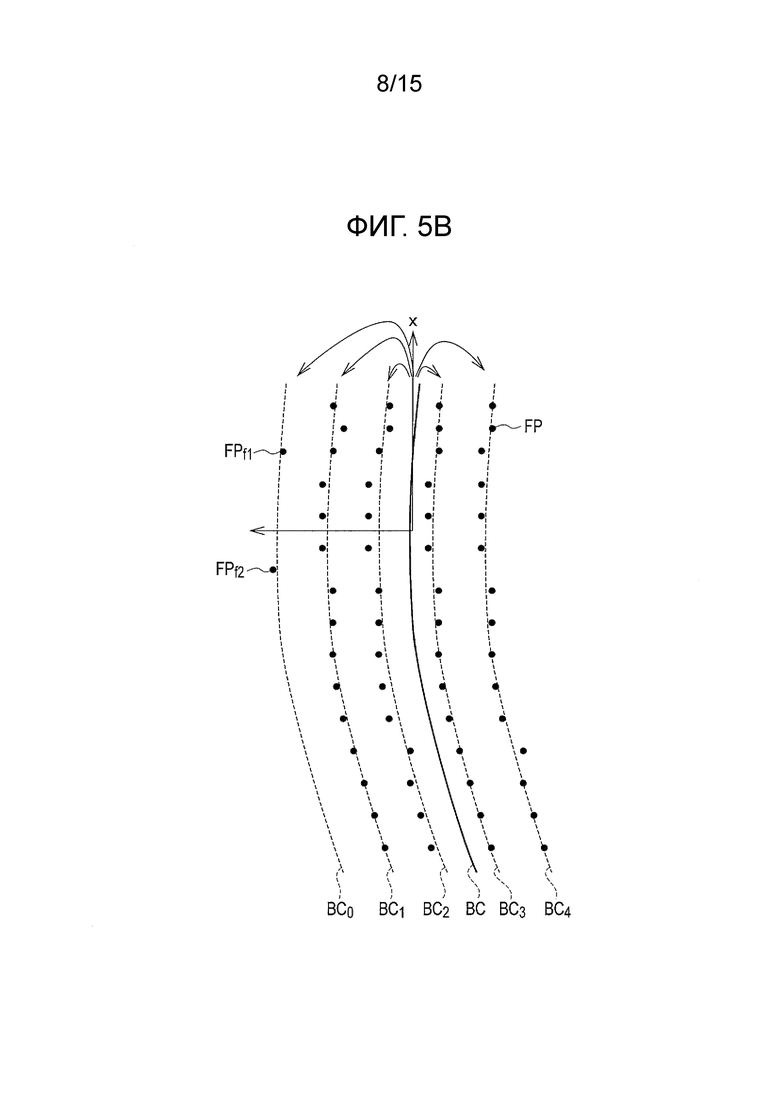
Фиг. 5B является видом "с высоты птичьего полета", показывающим контуры (BC0-BC4) полосы движения, сдвинутые в направлении по оси Y на величины смещения (поперечные позиции: d0-d4) дорожных модельных функций (KK0-KK4).
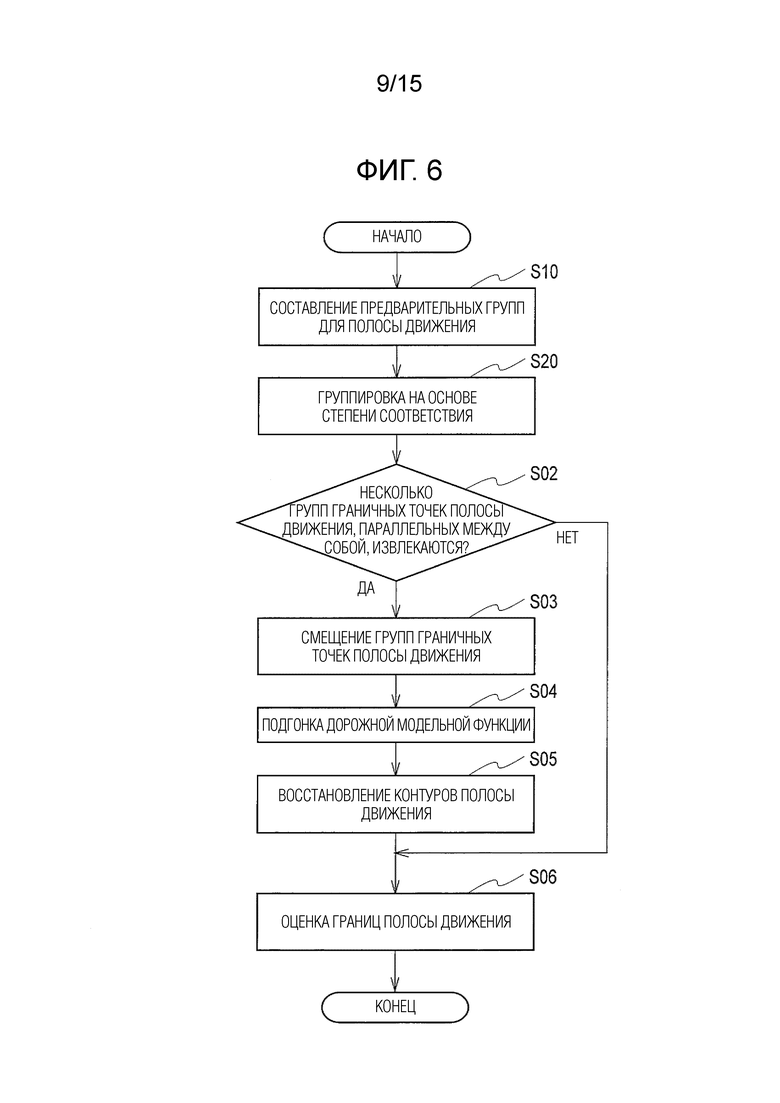
Фиг. 6 является блок-схемой последовательности операций, иллюстрирующей способ обнаружения полос движения согласно модифицированному примеру первого варианта осуществления.
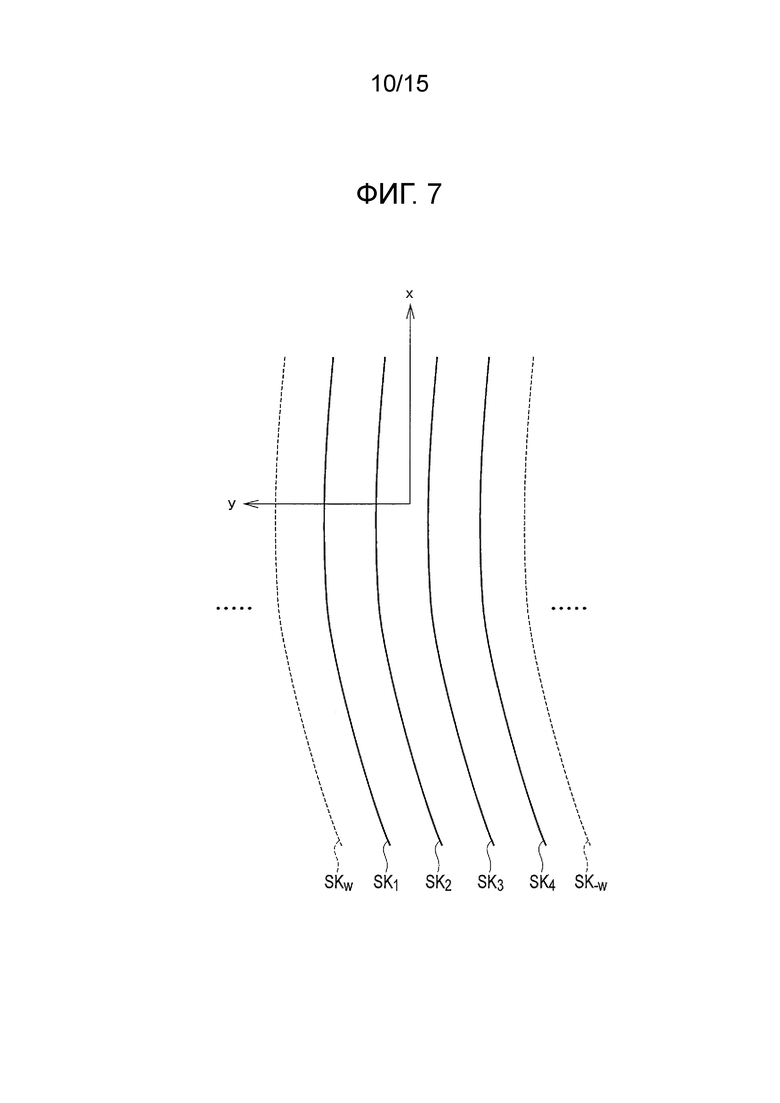
Фиг. 7 является видом "с высоты птичьего полета", показывающим границы (SK1, SK2, SK3, SK4) полосы движения, полученные в предыдущем цикле обработки.
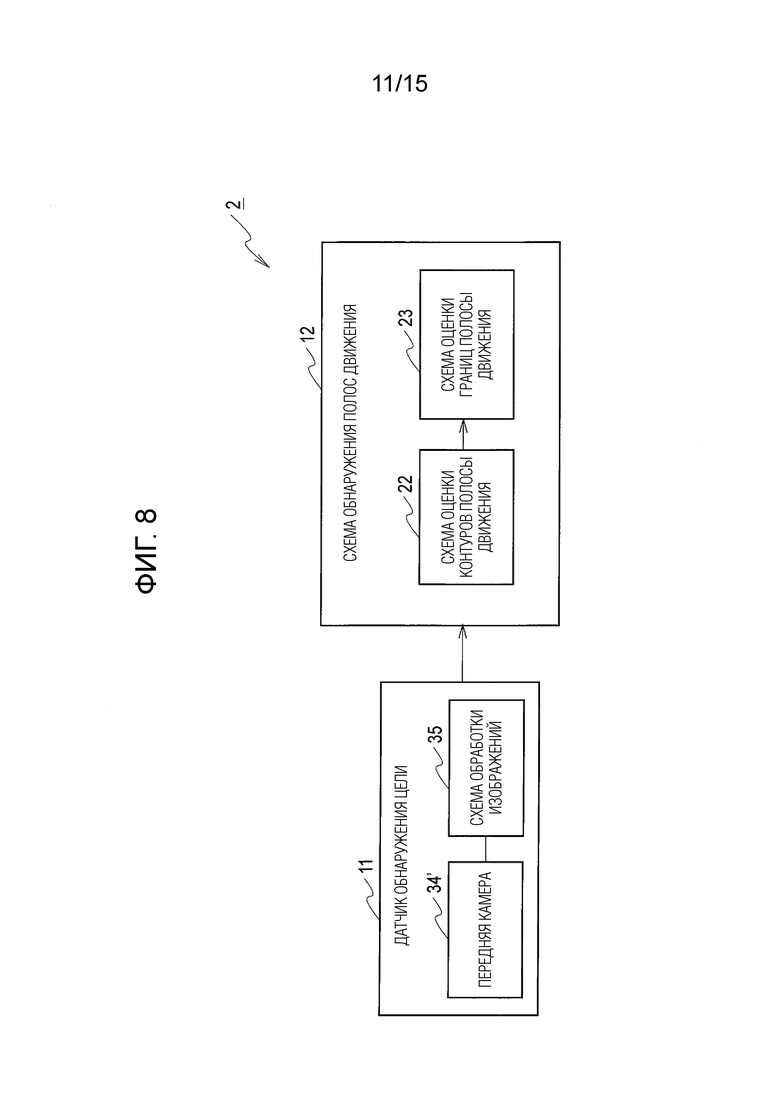
Фиг. 8 является блок-схемой, показывающей конфигурацию устройства 2 обнаружения полос движения согласно второму варианту осуществления.
Фиг. 9A является видом, иллюстрирующим изображение 52, захваченное посредством камеры 34' на фиг. 8.
Фиг. 9B является видом "с высоты птичьего полета", показывающим характеристические точки FP полосы движения, преобразованные в позиции в координатах "с высоты птичьего полета".
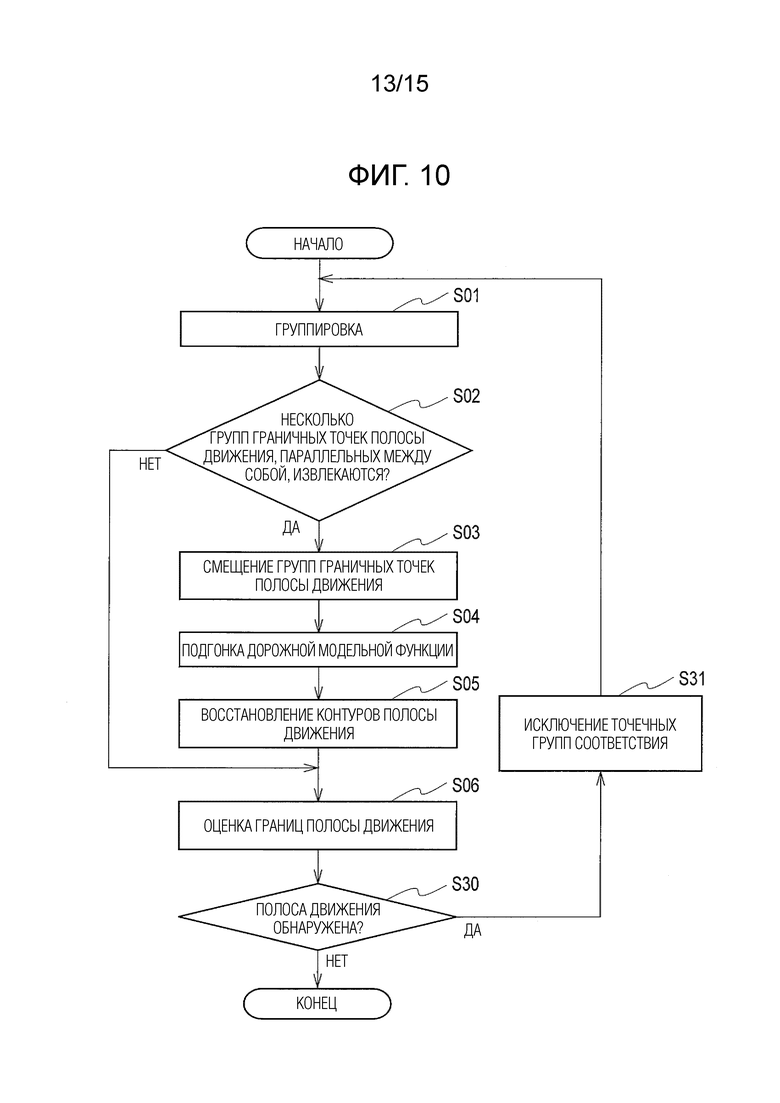
Фиг. 10 является блок-схемой последовательности операций, иллюстрирующей способ обнаружения полос движения согласно третьему варианту осуществления.
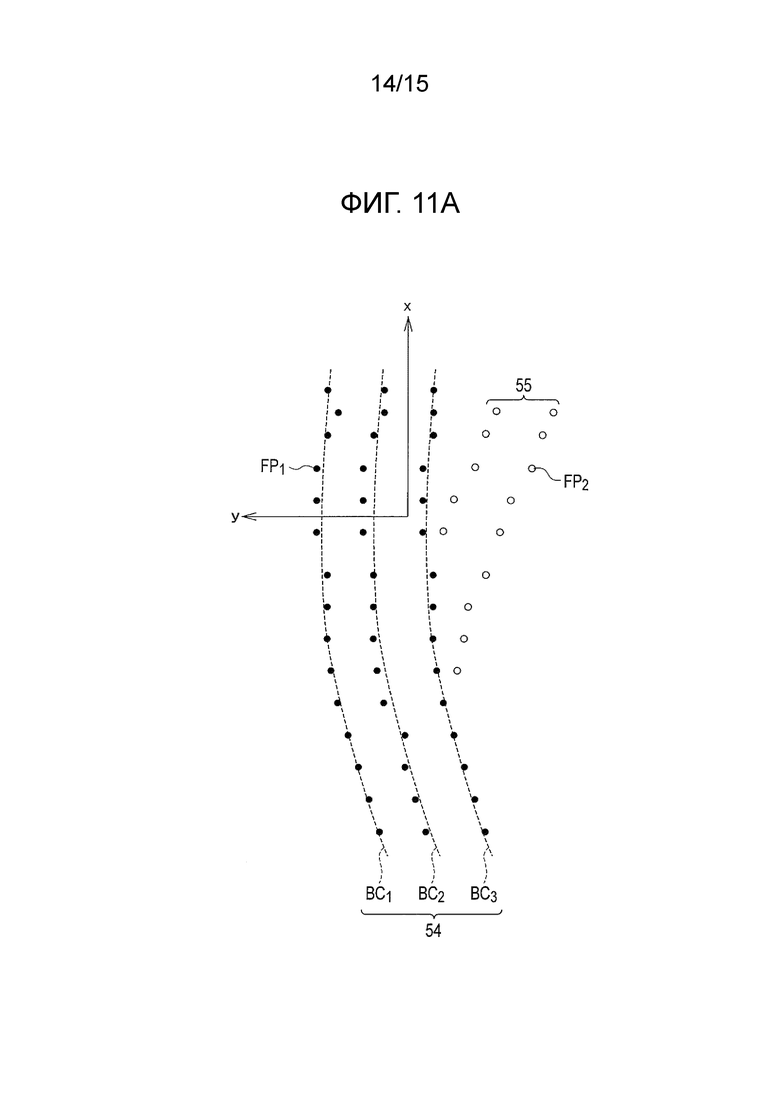
Фиг. 11A является видом "с высоты птичьего полета", показывающим множество характеристических точек FP1 полосы движения, поддерживающих контуры (BC1-BC3) полосы движения для главной полосы 54 движения, и множество характеристических точек FP2 полосы движения, принадлежащих ответвляющейся полосе 55 движения.
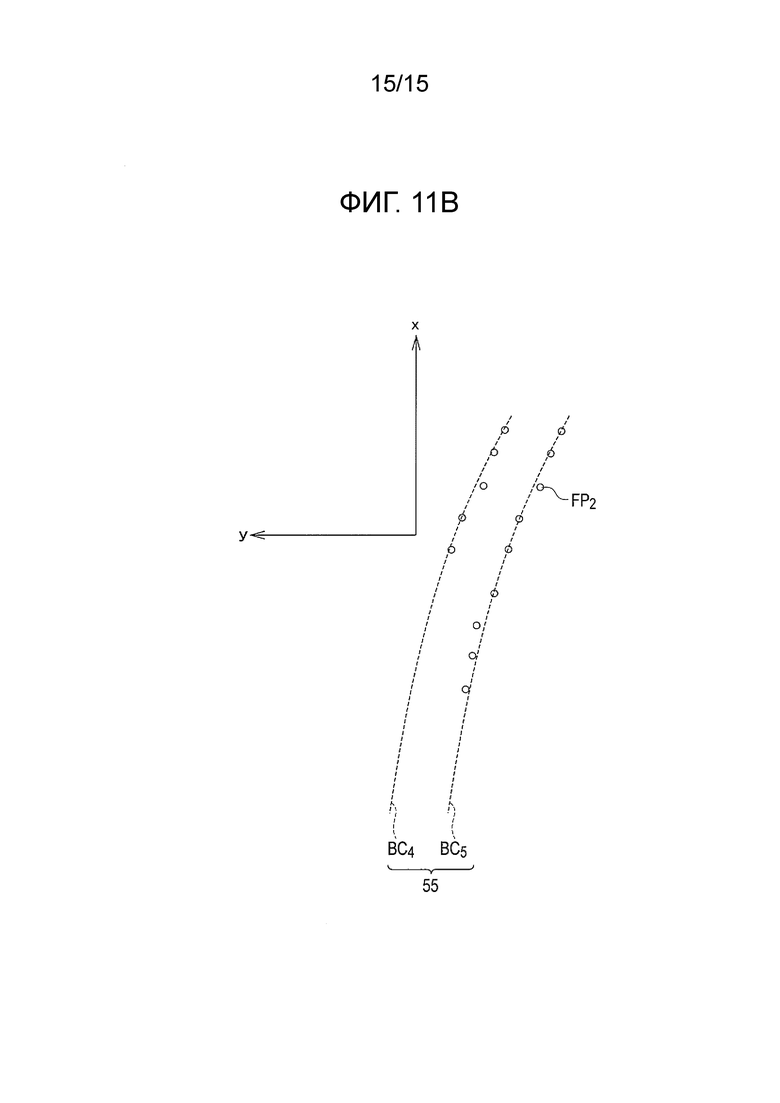
Фиг. 11B является видом "с высоты птичьего полета", показывающим характеристические точки FP2 полосы движения, поддерживающие контуры (BC4, BC5) полосы движения ответвляющейся полосы 55 движения и остающиеся после того, как характеристические точки FP1 полосы движения исключаются из фиг. 11A.
Подробное описание вариантов осуществления
[0009] Первый вариант осуществления
Ниже подробно описывается вариант осуществления со ссылкой на чертежи.
[0010] Конфигурация устройства 1 обнаружения полос движения согласно первому варианту осуществления описывается со ссылкой на фиг. 1. Устройство 1 обнаружения полос движения обнаруживает границы полосы движения, в которой движется транспортное средство, согласно характеристическим точкам полосы движения на поверхности дороги, обнаруженным посредством датчика, смонтированного на транспортном средстве. Устройство 1 обнаружения полос движения включает в себя датчик 11 обнаружения цели, смонтированный на транспортном средстве, датчик 10 обнаружения величины перемещения для обнаружения величины перемещения транспортного средства на основе скорости перемещения и скорости относительно вертикальной оси транспортного средства и схему 12 обнаружения полос движения для обнаружения границ полосы движения на основе характеристических точек полосы движения, обнаруженных посредством датчика 11 обнаружения цели, и величины перемещения транспортного средства, обнаруженной посредством датчика 10 обнаружения величины перемещения.
[0011] Датчик 11 обнаружения цели обнаруживает сигнальные линии дорожной разметки (включающие в себя разделительные линии), размеченные на поверхности дороги вокруг транспортного средства. Датчик 11 обнаружения цели включает в себя камеру 34, установленную в транспортном средстве, и схему 35 обработки изображений для обнаружения линий дорожной разметки, включающих в себя сигнальные линии дорожной разметки, из цифрового изображения, захваченного посредством камеры 34. Обнаруженные линии дорожной разметки указываются в качестве групп характеристических точек, включающих в себя множество характеристических точек полосы движения и показывающих позиции линий дорожной разметки. Схема 35 обработки изображений должна обнаруживать только точки (края яркости), яркость которых в изображении варьируется быстро или прерывисто, в качестве характеристических точек полосы движения.
[0012] Датчик 10 обнаружения величины перемещения включает в себя датчик 31 скорости вращения колес, датчик 32 скорости относительно вертикальной оси и схему 33 обнаружения величины перемещения. Датчик 31 скорости вращения колес обнаруживает скорость вращения колес транспортного средства. Датчик 32 скорости относительно вертикальной оси обнаруживает скорость относительно вертикальной оси транспортного средства. Схема 33 обнаружения величины перемещения обнаруживает величину перемещения транспортного средства в течение предварительно определенного периода времени согласно скорости вращения колес и скорости относительно вертикальной оси транспортного средства. Величина перемещения транспортного средства включает в себя, например, направление перемещения и расстояние перемещения транспортного средства.
[0013] Схема 12 обнаружения полос движения может представлять собой микрокомпьютер, включающий в себя центральный процессор (CPU), запоминающее устройство и модуль ввода-вывода. Компьютерная программа (программа обнаружения полос движения) для инструктирования микрокомпьютеру служить в качестве схемы 12 обнаружения полос движения устанавливается с возможностью выполняться в микрокомпьютере. Соответственно, микрокомпьютер функционирует в качестве схемы 12 обнаружения полос движения. Хотя настоящий вариант осуществления проиллюстрирован со случаем, в котором программное обеспечение устанавливается, чтобы изготавливать схему 12 обнаружения полос движения, следует понимать, что специализированные аппаратные средства для выполнения каждой обработки информации, как описано ниже, могут быть подготовлены, чтобы составлять схему 12 обнаружения полос движения. Множество схем (21, 22, 23), включенных в схему 12 обнаружения полос движения, могут состоять из отдельных аппаратных средств. В дополнение к схеме 12 обнаружения полос движения, схема 35 обработки изображений и схема 33 обнаружения величины перемещения могут состоять из программного обеспечения или специализированных аппаратных средств. Схема 12 обнаружения полос движения также может служить в качестве электронного модуля управления (ECU), используемого для другой обработки управления в транспортном средстве.
[0014] Схема 12 обнаружения полос движения включает в себя схему 21 формирования периферических карт, схему 22 оценки контуров полосы движения и схему 23 оценки границ полосы движения. Схема 21 формирования периферических карт формирует карту по всей периферии транспортного средства (первую периферическую карту), состоящую из групп характеристических точек, полученных таким образом, что предыстории обнаружения групп характеристических точек, обнаруженных посредством датчика 11 обнаружения цели, соединяются между собой согласно величине перемещения транспортного средства за период, в течение которого обнаруживается каждая группа характеристических точек. А именно, схема 21 формирования периферических карт соединяет соответствующие характеристические точки полосы движения, совместно измеряемые в различные моменты времени, с учетом величины перемещения транспортного средства. Схема 21 формирования периферических карт в силу этого сохраняет предыстории обнаружения характеристических точек полосы движения для того, чтобы формировать первую периферическую карту.
[0015] В частности, камера 34 захватывает изображение поверхности дороги по всей периферии транспортного средства за предварительно определенное время. Датчик 10 обнаружения величины перемещения обнаруживает направление перемещения и расстояние перемещения транспортного средства в течение предварительно определенного времени. Схема 21 формирования периферических карт перемещает характеристические точки полосы движения позиций движения посредством расстояния перемещения транспортного средства в направлении, противоположном направлению перемещения транспортного средства. Схема 21 формирования периферических карт повторяет эту операцию и соединяет несколько характеристических точек полосы движения, совместно измеряемых в различные моменты времени, с учетом величины перемещения транспортного средства, с тем чтобы сохранять предыстории обнаружения характеристических точек полосы движения для того, чтобы формировать первую периферическую карту.
[0016] Как показано на фиг. 3A, транспортное средство 51 движется на левой стороне двухполосной дороги, немного изгибающейся вправо. Фиг. 3A иллюстрирует три границы (SKa, SKb и SKc) полосы движения, задающие двухполосную дорогу. Первая периферическая карта, сформированная посредством схемы 21 формирования периферических карт, включает в себя группы характеристических точек (не показаны), обнаруженные вдоль трех границ (SKa, SKb и SKc) полосы движения. Настоящий вариант осуществления использует координаты на плоскости, в которых направление движения транспортного средства 51 задается как ось X, и направление ширины транспортного средства 51 задается как ось Y, на основе позиции транспортного средства 51, которая представляет собой начало координат двух осей.
[0017] Схема 22 оценки контуров полосы движения извлекает группу границ полосы движения в соответствии с неразрывностью множества характеристических точек полосы движения, включенных в первую периферическую карту. Когда множество групп границ полосы движения, параллельных между собой, извлекаются, схема 22 оценки контуров полосы движения перекрывает несколько групп границ полосы движения, параллельных между собой, и оценивает контуры полосы движения на основе характеристических точек полосы движения, включенных в перекрывающиеся группы границ полосы движения. Далее приводятся подробности операции обработки схемы 22 оценки контуров полосы движения.
[0018] Схема 22 оценки контуров полосы движения определяет неразрывность нескольких характеристических точек полосы движения согласно частоте в координате в направлении ширины транспортного средства (в направлении по оси Y). Например, схема 22 оценки контуров полосы движения формирует вторую периферическую карту, в которой позиция транспортного средства 51 представляет собой начало координат, направление ширины транспортного средства 51 представляет собой ось Y, и ось, ортогональная к оси Y, представляет собой временную ось (ось t), без учета величины перемещения транспортного средства 51. Схема 22 оценки контуров полосы движения наносит, на вторую периферическую карту, множество характеристических точек FP полосы движения, включенных в первую периферическую карту, показанную на фиг. 3A, в соответствии со временем (t) обнаружения и позициями (координатами Y) в направлении ширины транспортного средства, как показано на фиг. 3B(a).
[0019] Когда транспортное средство 51 движется вдоль полос движения, как показано на фиг. 3A, позиции (координаты Y) характеристических точек FP полосы движения в направлении ширины транспортного средства являются постоянными, как показано во второй периферической карте на фиг. 3B(a), поскольку величина перемещения транспортного средства 51 не учитывается относительно временной оси (оси t). Следовательно, характеристические точки FP полосы движения проиллюстрированы вдоль прямых линий, параллельных оси t, независимо от формы дороги (с плавным изгибом вправо).
[0020] Схема 22 оценки контуров полосы движения выбирает характеристические точки FP полосы движения, показанные на второй периферической карте, на одномерной гистограмме вдоль оси Y, как показано на фиг. 3B(b). Схема 22 оценки контуров полосы движения может определять неразрывность характеристических точек FP полосы движения из гистограммы.
[0021] Схема 22 оценки контуров полосы движения обнаруживает пики на гистограмме (координаты Y) и группирует характеристические точки FP полосы движения на второй периферической карте в расчете на пик, с тем чтобы извлекать группы граничных точек полосы движения. Группировка характеристических точек FP полосы движения на второй периферической карте проще группировки характеристических точек FP полосы движения на первой периферической карте. Каждая из сгруппированных характеристических точек FP полосы движения составляет одну группу граничных точек полосы движения. Группировка посредством использования гистограммы обеспечивает возможность схеме 22 оценки контуров полосы движения извлекать множество групп граничных точек полосы движения, параллельных между собой, одновременно. Вместо использования гистограммы, схема 22 оценки контуров полосы движения может инструктировать кривым аппроксимироваться в характеристические точки FP полосы движения, посредством использования известного способа, с тем чтобы подгонять множество кривых к группам граничных точек. Схема 22 оценки контуров полосы движения затем может определять то, являются или нет подогнанные кривые параллельными между собой.
[0022] Затем, схема 22 оценки контуров полосы движения подгоняет кривую, выраженную посредством дорожной модельной функции, к соответствующим группам граничных точек полосы движения на первой периферической карте. Дорожная модельная функция, например, представляет собой кубическую функцию (y=ax3+bx2+cx+d). Схема 22 оценки контуров полосы движения вычисляет коэффициенты a, b, c и d кубической функции. Хотя подгонка функции посредством метода наименьших квадратов может применяться к вычислению, надежная оценка, такая как согласование на основе случайных выборок (RANSAC), может использоваться для того, чтобы повышать стабильность.
[0023] Схема 22 оценки контуров полосы движения определяет то, извлекаются или нет несколько групп граничных точек полосы движения, параллельных между собой. В частности, схема 22 оценки контуров полосы движения определяет то, что несколько групп граничных точек полосы движения, параллельных между собой, извлекаются, когда подгоняются различные дорожные модельные функции, в которых соответствующие коэффициенты a, b и c являются практически идентичными, и коэффициенты d варьируются. Альтернативно, схема 22 оценки контуров полосы движения может определять то, обнаруживаются или нет два или более пиков на гистограмме.
[0024] Вид "с высоты птичьего полета", показанный на фиг. 4A, иллюстрирует пять дорожных модельных функций (KK0, KK1, KK2, KK3 и KK4), подогнанных к группам граничных точек полосы движения, параллельным между собой, и к характеристическим точкам FP полосы движения, включенным в соответствующие группы граничных точек полосы движения. Пять дорожных модельных функций (KK0-KK4) являются следующими:
[0025] KK0: y=ax3+bx2+cx+d0
KK1: y=ax3+bx2+cx+d1
KK2: y=ax3+bx2+cx+d2
KK3: y=ax3+bx2+cx+d3
KK4: y=ax3+bx2+cx+d4
[0026] В пяти дорожных модельных функциях (KK0-KK4), соответствующие коэффициенты a, b и c являются идентичными, и коэффициенты d варьируются. В системе координат X-Y, в которой позиция рассматриваемого транспортного средства представляет собой начало координат, постоянные члены d0, d1, d2, d3 и d4 в дорожных модельных функциях соответствуют величине смещения (поперечной позиции) каждой дорожной модельной функции в направлении по оси Y. Соответствующие постоянные члены d0, d1, d2, d3 и d4 показывают поперечную позиционную взаимосвязь между группами граничных точек полосы движения, параллельными между собой, и показывают относительную позиционную взаимосвязь между группами граничных точек полосы движения, параллельными между собой. Хотя настоящий вариант осуществления примерно иллюстрирует случай, в котором величина смещения (поперечная позиция) в направлении по оси Y получается из соответствующих дорожных модельных функций (KK0-KK4), координаты точек SKa, SKb и SKc на оси Y на одномерной гистограмме, показанной на фиг. 3B(b), могут использоваться в качестве величин смещения (поперечных позиций) групп граничных точек полосы движения. Это определение может исключать вычисление дорожных модельных функций групп граничных точек полосы движения.
[0027] Когда несколько групп граничных точек полосы движения, параллельных между собой, извлекаются, схема 22 оценки контуров полосы движения затем перемещает характеристические точки FP полосы движения, включенные в соответствующие параллельные группы граничных точек полосы движения, в направлении оси Y, противоположном направлению смещения, на величину, идентичную величине (d0, d1, d2, d3 и d4) смещения соответствующих подогнанных дорожных модельных функций (KK0-KK4), как показано на фиг. 4B. Соответственно, схема 22 оценки контуров полосы движения может перекрывать характеристические точки FP полосы движения, включенные в группы граничных точек полосы движения, параллельные между собой. Характеристические точки FP полосы движения могут перекрывать друг друга в нулевой точке оси Y или могут перекрывать друг друга таким образом, что одна из параллельных групп граничных точек полосы движения остается в исходной позиции, а все остальные перемещаются в одну группу граничных точек полосы движения.
[0028] Схема 22 оценки контуров полосы движения оценивает контур BC полосы движения на основе характеристических точек FP полосы движения, включенных в перекрывающиеся группы граничных точек полосы движения на первой периферической карте, как показано на фиг. 5A. В частности, дорожная модельная функция подгоняется к перекрывающимся группам граничных точек полосы движения. Когда дорожная модельная функция представляет собой кубическую функцию (y=ax3+bx2+cx+d), схема 22 оценки контуров полосы движения вычисляет коэффициенты a, b, c и d. Контур BC полосы движения в силу этого выражается посредством дорожной модельной функции.
[0029] Схема 23 оценки границ полосы движения определяет границы полосы движения на основе поперечных позиций (величин смещения) параллельных групп граничных точек полосы движения и контура BC полосы движения. В частности, схема 23 оценки границ полосы движения перемещает контур BC полосы движения в направлении по оси Y на величины смещения (поперечные позиции: d0-d4) дорожных модельных функций (KK0-KK4), как показано на фиг. 5B. Другими словами, схема 23 оценки границ полосы движения восстанавливает границы полосы движения, с формой, идентичной контуру BC полосы движения, на основе контура BC полосы движения и позиций (координат Y) групп граничных точек полосы движения в направлении ширины транспортного средства.
[0030] Схема 23 оценки границ полосы движения определяет границы полосы движения согласно степени соответствия характеристических точек полосы движения, включенных в группы граничных точек полосы движения, с контурами (BC0, BC1, BC2, BC3 и BC4) полосы движения. Схема 23 оценки границ полосы движения подсчитывает число характеристических точек полосы движения, имеющих расстояние от соответствующих контуров (BC0, BC1, BC2, BC3 и BC4) полосы движения, меньшее опорного значения, с тем чтобы вычислять степень соответствия. Схема 23 оценки границ полосы движения определяет то, что степень соответствия является низкой, когда число подсчитанных характеристических точек полосы движения меньше предварительно определенного значения, и то, что степень соответствия является высокой, когда число подсчитанных характеристических точек полосы движения превышает или равно предварительно определенному значению. Схема 23 оценки границ полосы движения отклоняет контур (BC0) полосы движения, определенный как имеющий степень соответствия ниже предварительно определенного значения, когда контур полосы движения извлекается из характеристических точек (FPf1, FPf2) полосы движения, обнаруженных некорректно. Схема 23 оценки границ полосы движения определяет то, что контуры (BC1, BC2, BC3 и BC4) полосы движения с высокой степенью соответствия представляют собой границы полосы движения, с тем чтобы выводить информацию позиции полосы движения, включающую в себя определенные границы полосы движения, в качестве результата обнаружения полос движения.
[0031] После этого ниже описывается пример способа обнаружения полос движения с использованием устройства 1 обнаружения полос движения, показанного на фиг. 1, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 2. Далее приводится рабочий процесс, выполняемый посредством схемы 12 обнаружения полос движения, включенной в устройство 1 обнаружения полос движения. Обработка, показанная на фиг. 2, многократно выполняется в предварительно определенном цикле.
[0032] На этапе S01, схема 12 обнаружения полос движения извлекает группу границ полосы движения на основе неразрывности множества характеристических точек FP полосы движения, как описано со ссылкой на фиг. 3A, фиг. 3B(a) и фиг. 3B(b).
[0033] В частности, схема 21 формирования периферических карт соединяет соответствующие характеристические точки FP полосы движения, совместно измеряемые в различные моменты времени, с учетом величины перемещения транспортного средства. Схема 21 формирования периферических карт в силу этого сохраняет предыстории обнаружения характеристических точек FP полосы движения для того, чтобы формировать первую периферическую карту. Схема 22 оценки контуров полосы движения извлекает группу границ полосы движения на основе неразрывности нескольких характеристических точек полосы движения, включенных в первую периферическую карту. Схема 22 оценки контуров полосы движения обнаруживает пик на гистограмме (координату Y), показанный на фиг. 3B(b), и задает характеристические точки FP полосы движения в группу в расчете на пик, включенный во вторую периферическую карту, показанную на фиг. 3B(a), с тем чтобы извлекать группу граничных точек полосы движения. Схема 22 оценки контуров полосы движения затем подгоняет кривую, выраженную посредством дорожной модельной функции, к извлеченной группе граничных точек полосы движения. Например, схема 22 оценки контуров полосы движения вычисляет коэффициенты a, b, c и d кубической функции (y=ax3+bx2+cx+d).
[0034] Процесс переходит к этапу S02, и схема 22 оценки контуров полосы движения определяют то, извлекаются или нет множество групп граничных точек полосы движения, параллельных между собой, на этапе S01. Например, может определяться то, что несколько групп граничных точек полосы движения, параллельных между собой, извлекаются, когда два или более пиков обнаруживаются на одномерной гистограмме вдоль оси Y. Альтернативно, схема 22 оценки контуров полосы движения может определять то, что несколько групп граничных точек полосы движения, параллельных между собой, извлекаются, когда используются дорожные модельные функции, в которых соответствующие коэффициенты a, b и c являются практически идентичными, и коэффициенты d варьируются.
[0035] Когда определяется "Да" на этапе S02, обработка перекрытия нескольких групп граничных точек полосы движения, параллельных между собой, может выполняться, и процесс переходит к этапу S03. Когда определяется "Нет" на этапе S02, обработка перекрытия не может выполняться, и процесс переходит к этапу S06.
[0036] На этапе S03, схема 22 оценки контуров полосы движения перемещает характеристические точки FP полосы движения, включенные в соответствующие группы граничных точек полосы движения, параллельные между собой, в направлении оси Y, противоположном направлению смещения, на величину, идентичную величине (d0-d4) смещения соответствующих подогнанных дорожных модельных функций (KK0-KK4), как показано на фиг. 4B. Соответственно, схема 22 оценки контуров полосы движения может перекрывать несколько групп граничных точек полосы движения, параллельных между собой.
[0037] На этапе S04, схема 22 оценки контуров полосы движения подгоняет дорожную модельную функцию к перекрывающимся группам граничных точек полосы движения. Схема 22 оценки контуров полосы движения в силу этого может оценивать контур BC полосы движения на основе характеристических точек FP полосы движения, включенных в перекрывающиеся группы граничных точек полосы движения на первой периферической карте, как показано на фиг. 5A.
[0038] На этапе S05, схема 23 оценки границ полосы движения перемещает контур BC полосы движения в направлении по оси Y на величины смещения (поперечные позиции: d0-d4) дорожных модельных функций (KK0-KK4), как показано на фиг. 5B. Схема 23 оценки границ полосы движения в силу этого может восстанавливать границы полосы движения на основе позиций (координат Y) групп граничных точек полосы движения в направлении ширины транспортного средства.
[0039] На этапе S06, схема 23 оценки границ полосы движения определяет границы полосы движения согласно степени соответствия характеристических точек полосы движения, включенных в группы граничных точек полосы движения, с контурами (BC0-BC4) полосы движения. В частности, схема 23 оценки границ полосы движения вычисляет степень соответствия характеристических точек полосы движения с контурами (BC0-BC4) полосы движения. Схема 23 оценки границ полосы движения отклоняет контур (BC0) полосы движения, определенный как имеющий степень соответствия ниже предварительно определенного значения, когда контур полосы движения извлекается из характеристических точек (FPf1, FPf2) полосы движения, обнаруженных некорректно. Схема 23 оценки границ полосы движения определяет то, что контуры (BC1-BC4) полосы движения со степенью соответствия выше предварительно определенного значения представляют собой границы полосы движения, с тем чтобы выводить информацию позиции полосы движения, включающую в себя определенные границы полосы движения, в качестве результата обнаружения полос движения.
[0040] Когда группы граничных точек полосы движения, параллельные между собой, извлекаются ("Нет" на этапе S02), схема 23 оценки границ полосы движения может вычислять степень соответствия характеристических точек FP полосы движения с дорожной модельной функцией, подогнанной на этапе S01, вместо степени соответствия с контурами (BC1-BC4) полосы движения, восстановленными на этапе S05.
[0041] Модифицированный пример первого варианта осуществления
В отношении обработки извлечения групп граничных точек полосы движения, проиллюстрированных на этапе S01, устройство 1 обнаружения полос движения, показанное на фиг. 1, может составлять предварительные группы для полосы движения на основе границ полосы движения, полученных в предыдущем цикле обработки, с тем чтобы извлекать группы граничных точек полосы движения.
[0042] Ниже описывается пример способа обнаружения полос движения согласно модифицированному примеру первого варианта осуществления со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 6. Далее приводится рабочий процесс, выполняемый посредством схемы 12 обнаружения полос движения, включенной в устройство 1 обнаружения полос движения. Обработка, показанная на фиг. 6, многократно выполняется в предварительно определенном цикле. Модифицированный пример выполняет этапы S10 и S20 вместо этапа S01 на фиг. 2. Другие этапы S02-S06 являются идентичными этапам на фиг. 2, и их пояснения не повторяются ниже.
[0043] На этапе S10, схема 22 оценки контуров полосы движения составляет предварительные группы для полосы движения посредством использования границ полосы движения, полученных в предыдущем цикле обработки. Далее приводится случай, в котором четыре границы (SK1, SK2, SK3 и SK4) полосы движения получился в предыдущем цикле обработки, как показано на фиг. 7.
[0044] SK1: y=a'x3+b'x2+c'x+d'1
SK2: y=a'x3+b'x2+c'x+d'2
SK3: y=a'x3+b'x2+c'x+d'3
SK4: y=a'x3+b'x2+c'x+d'4
[0045] В четырех границах (SK1-SK4) полосы движения, соответствующие коэффициенты a', b' и c' являются идентичными, и величины смещения (отсекаемые отрезки по оси Y: d'1-d'4) варьируются. Схема 22 оценки контуров полосы движения получает среднюю ширину (w) полосы движения из четырех границ (SK1-SK4) полосы движения. А именно, схема 22 оценки контуров полосы движения вычисляет каждое расстояние (ширину полосы движения) между соответствующими смежными границами полосы движения, с тем чтобы получать среднее значение (w) расстояний. Схема 22 оценки контуров полосы движения затем добавляет новые границы (SKw, SK-w) полосы движения с шириной (w) полосы движения с обеих сторон четырех границ (SK1-SK4) полосы движения. Схема 22 оценки контуров полосы движения в силу этого составляет шесть границ (SK1-SK4, SKw, SK-w) полосы движения всего в качестве предварительных групп для полосы движения.
[0046] Модифицированный пример проиллюстрирован со случаем, в котором предварительные группы для полосы движения составляются посредством использования границ полосы движения, полученных в предыдущем цикле обработки, но не ограничен этой иллюстрацией. Например, предварительные группы для полосы движения могут составляться согласно информации групп для полосы движения в картографической информации.
[0047] Процесс переходит к этапу S20, и схема 22 оценки контуров полосы движения задает соответствующие характеристические точки FP полосы движения в группу согласно степени соответствия с соответствующими предварительными группами для полосы движения, с тем чтобы извлекать группу граничных точек полосы движения. Схема 22 оценки контуров полосы движения вычисляет расстояния между характеристическими точками FP полосы движения и соответствующими границами (SK1-SK4, SKw, SK-w) полосы движения, составляющими предварительные группы для полосы движения, и выделяет соответствующие характеристические точки FP полосы движения соответствующей границе (SK1-SK4, SKw, SK-w) полосы движения, имеющей кратчайшее расстояние между ними. Схема 22 оценки контуров полосы движения затем задает соответствующие характеристические точки FP полосы движения, выделенные общей границе полосы движения, в группу, с тем чтобы извлекать одну группу граничных точек полосы движения.
[0048] Когда координаты соответствующих характеристических точек FP полосы движения задаются как (xi, yi), и соответствующие границы полосы движения выражаются посредством y=a'x3+b'x2+c'x+d', расстояния между характеристическими точками FP полосы движения и границами полосы движения каждый получаются в качестве абсолютного значения yi-(a'x3+b'x2+c'x+d'). Границы полосы движения, не поддерживаемые посредством любых характеристических точек FP полосы движения, отклоняются в этот момент.
[0049] Схема 22 оценки контуров полосы движения затем подгоняет кубическую функцию к группе характеристических точек полосы движения, выделенной общей границе (SK1-SK4, SKw, SK-w) полосы движения, и получает величину смещения границы полосы движения из начала системы координат согласно полученному постоянному члену (d), аналогично этапу S01 в первом варианте осуществления.
[0050] Как описано выше, первый вариант осуществления и модифицированный пример позволяют достигать следующих преимуществ.
[0051] Схема 22 оценки контуров полосы движения оценивает контуры (BC0-BC4) полосы движения, на основе характеристических точек FP полосы движения, включенных в перекрывающиеся группы граничных точек полосы движения, и схема 23 оценки границ полосы движения определяет границы полосы движения на основе поперечных позиций (d0-d4) групп граничных точек полосы движения, параллельных между собой, и контуров (BC0-BC4) полосы движения. Как результат, характеристические точки полосы движения, принадлежащие ответвляющейся полосе движения и т.п., не параллельной другим полосам движения, могут исключаться, чтобы оценивать контуры полосы движения. Соответственно, контуры главной полосы движения из числа текущих измеряемых полос движения могут оцениваться стабильно, и может получаться информация относительно числа полос движения и ширины полосы движения для всех полос движения и т.п.
[0052] Несколько характеристических точек полосы движения, включенных в первую периферическую карту, представляют собой характеристические точки, обнаруженные в различные моменты времени и соединенные между собой с учетом величины перемещения транспортного средства. Следовательно, контуры полосы движения могут оцениваться с большей точностью, чем в случае, в котором контуры полосы движения определяются только посредством использования характеристических точек полосы движения, обнаруженных в одно время.
[0053] Схема 23 оценки границ полосы движения определяет границы полосы движения на основе степени соответствия (достоверности) характеристических точек полосы движения, включенных в соответствующие группы граничных точек полосы движения, с контурами (BC0-BC4) полосы движения. Соответственно, другие характеристические точки (FPf1, FPf2) полосы движения, обнаруженные некорректно, или контуры полосы движения, оцененные некорректно, могут быть отклонены в соответствии со степенью соответствия.
[0054] Второй вариант осуществления
Второй вариант осуществления проиллюстрирован для случая получения контуров полосы движения и границ полосы движения согласно только характеристическим точкам полосы движения, обнаруженным в одно время, вместо характеристических точек полосы движения, обнаруженных в различные моменты времени и соединенных между собой с учетом величины перемещения транспортного средства.
[0055] Ниже описывается конфигурация устройства 2 обнаружения полос движения согласно второму варианту осуществления со ссылкой на фиг. 8. Устройство 2 обнаружения полос движения не включает в себя датчик 10 обнаружения величины перемещения, показанный на фиг. 1, поскольку необязательно соединять характеристические точки полосы движения с учетом величины перемещения транспортного средства, чтобы формировать первую периферическую карту. Помимо этого, схема 12 обнаружения полос движения не включает в себя схему 21 формирования периферических карт, показанную на фиг. 1. Во втором варианте осуществления, камера 34' устанавливается в транспортном средстве со стороной захвата, направленной на поверхность дороги в направлении движения. Другие элементы устройства 2 обнаружения полос движения являются идентичными элементам в устройстве 1 обнаружения полос движения.
[0056] Камера 34' прикрепляется к передней стороне внутри транспортного средства, чтобы захватывать линии дорожной разметки перед транспортным средством. Фиг. 9A иллюстрирует изображение 52, захваченное посредством камеры 34'. Изображение 52 включает в себя линии дорожной разметки (разделительные линии 56), указывающие границы полосы движения. Схема 35 обработки изображений обнаруживает, в качестве характеристических точек FP полосы движения, краевые точки разделительных линий 56, яркость которых в изображении 52 варьируется быстро или прерывисто.
[0057] Как показано на фиг. 9B, схема 22 оценки контуров полосы движения преобразует позиции обнаруженных характеристических точек FP полосы движения в изображении 52 в позиции в координатах "с высоты птичьего полета" при просмотре сверху транспортного средства 51. Схема 22 оценки контуров полосы движения выполняет обработку преобразования точки обзора на основе угла установки камеры 34' относительно поверхности дороги, который представляет собой угол направления захвата относительно поверхности дороги, и расстояния от камеры 34' до поверхности дороги. Схема 22 оценки контуров полосы движения затем группирует характеристические точки FP полосы движения в каждой границе полосы движения 56, с тем чтобы извлекать группы характеристических точек полосы движения в координатах "с высоты птичьего полета", показанных на фиг. 9B. Схема 22 оценки контуров полосы движения выполняет обработку для характеристических точек FP полосы движения, указываемых в координатах "с высоты птичьего полета", вместо первой и второй периферических карт, показанных на фиг. 3A и фиг. 3B(a). Характеристические точки FP полосы движения, показанные на фиг. 9B, обнаруживаются в пределах угла 53a, 53b обзора камеры 34'. Когда частота характеристических точек FP полосы движения в координате в направлении ширины транспортного средства (в координате Y) получается, гистограмма может формироваться для характеристических точек полосы движения в изображении одного кадра идентично тому, как проиллюстрировано на фиг. 3B(b). Схема 22 оценки контуров полосы движения в силу этого может определять неразрывность нескольких характеристических точек FP полосы движения в соответствии с гистограммой.
[0058] Другие операции схемы 22 оценки контуров полосы движения и операции схемы 23 оценки границ полосы движения являются идентичными операциям в первом варианте осуществления или модифицированному примеру, и их пояснения не повторяются ниже. Блок-схема последовательности операций, иллюстрирующая способ обнаружения полос движения с использованием устройства 2 обнаружения полос движения, является общей с блок-схемой последовательности операций способа, показанной на фиг. 2 или фиг. 6.
[0059] Как описано выше, второй вариант осуществления может обнаруживать контуры полосы движения и границы полосы движения в течение меньшего времени, чем в случае использования характеристических точек полосы движения, обнаруженных в различные моменты времени и соединенных между собой с учетом величины перемещения транспортного средства. Помимо этого, поскольку камера 34' захватывает линии дорожной разметки, нарисованные на поверхности дороги перед транспортным средством 51, устройство 2 обнаружения полос движения может обнаруживать границы полосы движения перед транспортным средством 51, которые не могут получаться из предысторий обнаружения предыдущих характеристических точек полосы движения.
[0060] Третий вариант осуществления
Третий вариант осуществления проиллюстрирован для случая, после обнаружения главной полосы движения (главной линии), поиска снова полосы движения, отличающейся от главной полосы движения, к примеру, ответвляющейся полосы движения. Хотя третий вариант осуществления примерно иллюстрирует случай, включающий в себя обработку поиска ответвляющейся полосы движения после обработки обнаружения главной полосы движения, как проиллюстрировано в первом варианте осуществления (фиг. 2), обработка выполнения поиска может выполняться после обработки, проиллюстрированной в модифицированном примере или втором варианте осуществления.
[0061] Ниже описывается пример способа обнаружения полос движения согласно третьему варианту осуществления со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 10. Далее приводится рабочий процесс, выполняемый посредством схемы 12 обнаружения полос движения, включенной в устройство 1 обнаружения полос движения. Обработка, показанная на фиг. 10, многократно выполняется в предварительно определенном цикле.
[0062] Этапы S01-S06 являются идентичными этапам в первом варианте осуществления, и их пояснения не повторяются ниже.
[0063] Процесс переходит к этапу S30 после этапа S06, и схема 12 обнаружения полос движения определяет то, обнаруживаются или нет контуры полосы движения, имеющие степень соответствия, выше или равную опорному значению, на этапе S06. А именно, схема 12 обнаружения полос движения определяет то, существуют или нет контуры полосы движения, определенные в качестве границ полосы движения, имеющих степень соответствия, выше или равную опорному значению. Когда границы полосы движения обнаруживаются ("Да" на этапе S30), процесс возвращается к этапу S01 через этап S31, чтобы обнаруживать не только границы полосы движения для главной полосы движения (главной линии), но также и границы полосы движения для другой полосы движения (ответвляющейся полосы движения). Когда границы полосы движения не обнаруживаются ("Нет" на этапе S30), схема 12 обнаружения полос движения выводит информацию позиции полосы движения, включающую в себя границы полосы движения, определенные вплоть до этого момента, и заканчивает процесс.
[0064] На этапе S31, схема 12 обнаружения полос движения извлекает группы граничных точек полосы движения, имеющие степень соответствия характеристических точек FP полосы движения с контурами полосы движения ниже предварительно определенного значения. Например, как показано на фиг. 11A, множество характеристических точек FP1 полосы движения, поддерживающих контуры (BC1-BC3) полосы движения для главной полосы 54 движения (точечных групп соответствия), исключаются, и разрешается оставаться только характеристическим точкам FP2 полосы движения, не поддерживающим границы полосы движения для главной полосы 54 движения.
[0065] Процесс возвращается к этапу S01, и схема 12 обнаружения полос движения группируют оставшиеся характеристические точки FP2 полосы движения для того, чтобы извлекать группы граничных точек полосы движения. После этого, схема 12 обнаружения полос движения выполняет этапы S02-S06 снова, с тем чтобы обнаруживать контуры (BC4, BC5) полосы движения, показанные на фиг. 11B, в качестве границ полосы движения ответвляющейся полосы 55 движения. После этого, процесс переходит к этапу S31; тем не менее, поскольку пример, показанный на фиг. 11A и фиг. 11B, включает только в себя две линии главной полосы 54 движения и ответвляющейся полосы 55 движения, группы характеристических точек, отличные от групп граничных точек полосы движения, составляющих главную линию и ответвляющуюся полосу движения, обнаруживаются только после того, как обнаруживается ответвляющаяся полоса движения. Другими словами, поскольку характеристические точки полосы движения, не поддерживающие контуры (BC1-BC5) полосы движения, не остаются, границы полосы движения не обнаруживаются на этапе S06, и в силу этого определяется "Нет" на этапе S30. Схема 12 обнаружения полос движения затем выводит информацию позиции полосы движения, включающую в себя границы полосы движения главной линии 54 и ответвляющейся полосы 55 движения, определенные вплоть до этого момента, чтобы заканчивать цикл обработки.
[0066] Как описано выше, третий вариант осуществления извлекает группы граничных точек полосы движения, имеющие степень соответствия с контурами (BC1-BC3) полосы движения ниже предварительно определенного значения, и оценивает другие контуры (BC4, BC5) полосы движения на основе групп граничных точек полосы движения со степенью соответствия ниже предварительно определенного значения. Соответственно, могут оцениваться не только контуры главной полосы движения (главной полосы движения), но также и другие контуры полосы движения (ответвляющейся полосы движения и т.п.).
[0067] Первый вариант осуществления примерно иллюстрирует обработку группировки для характеристических точек полосы движения посредством использования гистограммы. Следует понимать, что второй вариант осуществления может использовать гистограмму для характеристических точек FP полосы движения в изображении 52 одного кадра, когда получается частота в координате в направлении ширины транспортного средства (в координате Y). Аналогично, третий вариант осуществления может выполнять обработку группировки для характеристических точек полосы движения с использованием гистограммы. Например, кривым инструктируется аппроксимироваться к характеристическим точкам FP полосы движения, принадлежащим ответвляющейся полосе 55 движения, показанной на фиг. 11B, с тем чтобы перекомпоновывать ось X таким образом, чтобы соответствовать наклонному направлению аппроксимирующих кривых. Соответственно, обработка группировки для характеристических точек FP2 полосы движения посредством использования гистограммы может выполняться снова.
[0068] Функции, описанные в соответствующих вариантах осуществления, могут реализовываться в одной или более схем обработки. Схема обработки включает в себя программируемое обрабатывающее устройство, к примеру, обрабатывающее устройство, включающее в себя электрическую схему. Такое обрабатывающее устройство включает в себя специализированную интегральную схему (ASIC), выполненную с возможностью выполнять функции, описанные в соответствующих вариантах осуществления, или традиционный схемный компонент.
[0069] Хотя соответствующие варианты осуществления проиллюстрированы с автономным устройством (1, 2) обнаружения полос движения, включающим в себя датчик 10 обнаружения величины перемещения и датчик 11 обнаружения цели, устройство обнаружения полос движения может иметь клиент-серверную модель с использованием компьютерной сети через сеть беспроводной связи. В таком случае, транспортное средство 51 (клиент), включающее в себя датчик 10 обнаружения величины перемещения и датчик 11 обнаружения цели, соединяется с устройством обнаружения полос движения (сервером), например, через компьютерную сеть. Сервер, включающий в себя схему 12 обнаружения полос движения, как показано на фиг. 1 или фиг. 8, в силу этого может соединяться с датчиком 10 обнаружения величины перемещения и датчиком 11 обнаружения цели через компьютерную сеть. Устройство обнаружения полос движения в этом случае включает в себя главным образом схему 12 обнаружения полос движения (сервер) без включения датчика 10 обнаружения величины перемещения или датчика 11 обнаружения цели.
[0070] Хотя настоящее изобретение описывается выше со ссылкой на варианты осуществления, следует понимать, что настоящее изобретение не имеет намерение быть ограниченным вариантами осуществления, описанными выше, и различные модификации и улучшения должны быть очевидными для специалистов в данной области техники в пределах объема настоящего изобретения.
Список номеров ссылок
[0071] 1, 2 - устройство обнаружения полос движения
10 - датчик обнаружения величины перемещения
11 - датчик обнаружения цели
12 - схема обнаружения полос движения
22 - схема оценки контуров полосы движения
23 - схема оценки границ полосы движения
51 - транспортное средство
BC0-BC5 - контур полосы движения
FP - характеристическая точка полосы движения

Способ обнаружения полос движения перекрывает множество групп граничных точек полосы движения, параллельных между собой, извлеченных согласно неразрывности множества характеристических точек полосы движения, обнаруженных посредством датчика обнаружения цели, установленного в транспортном средстве, оценивает контур полосы движения согласно характеристическим точкам полосы движения, включенным в перекрывающиеся группы граничных точек полосы движения, и определяет границы полосы движения на основе поперечных позиций групп граничных точек полосы движения, параллельных между собой, и оцененного контура полосы движения. Изобретение обеспечивает стабильное обнаружение контуров границ полосы движения. 2 н. и 3 з.п. ф-лы, 17 ил.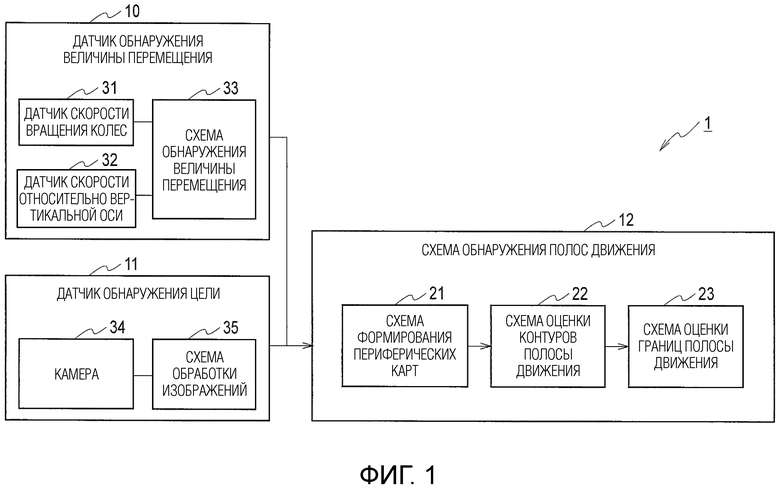
1. Способ обнаружения полос движения с использованием схемы обнаружения полос движения для определения границ полосы движения согласно множеству характеристических точек полосы движения, обнаруженных посредством датчика обнаружения цели, установленного в транспортном средстве, причем схема обнаружения полос движения выполнена с возможностью осуществлять этапы, на которых:
- извлекают группу граничных точек полосы движения на основе неразрывности множества характеристических точек полосы движения;
- когда обнаруживаются множество групп граничных точек полосы движения, параллельных между собой, перекрывают множество групп граничных точек полосы движения посредством перемещения характеристических точек полосы движения каждой группы из множества групп граничных точек полосы движения в соответствующем первом направлении по ширине транспортного средства;
- оценивают контур полосы движения согласно характеристическим точкам полосы движения, включенным в перекрывающиеся группы граничных точек полосы движения; и
- определяют границы полосы движения посредством перемещения оцененного контура полосы движения в соответствующем втором направлении по ширине транспортного средства, которое является противоположным соответствующему первому направлению по ширине транспортного средства.
2. Способ обнаружения полос движения по п. 1, в котором множество характеристических точек полосы движения обнаруживаются в различные моменты времени и соединяются между собой с учетом величины перемещения транспортного средства.
3. Способ обнаружения полос движения по п. 1 или 2, в котором схема обнаружения полос движения определяет границы полосы движения на основе степени соответствия характеристических точек полосы движения, включенных в соответствующие группы граничных точек полосы движения, с контуром полосы движения.
4. Способ обнаружения полос движения по п. 1 или 2, в котором схема обнаружения полос движения извлекает группы граничных точек полосы движения, имеющие степень соответствия характеристических точек полосы движения с контуром полосы движения ниже предварительно определенного значения, и оценивает другой контур полосы движения на основе групп граничных точек полосы движения со степенью соответствия ниже предварительно определенного значения.
5. Устройство обнаружения полос движения, содержащее контроллер, запрограммированный с возможностью:
- извлекать группу граничных точек полосы движения согласно множеству характеристических точек полосы движения, обнаруженных посредством датчика обнаружения цели, установленного в транспортном средстве;
- когда обнаруживаются множество групп граничных точек полосы движения, параллельных между собой, перекрывать параллельные группы граничных точек полосы движения посредством перемещения характеристических точек полосы движения каждой группы из множества групп граничных точек полосы движения в первом направлении по ширине транспортного средства;
- оценивать контур полосы движения согласно характеристическим точкам полосы движения, включенным в перекрывающиеся группы граничных точек полосы движения; и
- определять границы полосы движения посредством перемещения оцененного контура полосы движения во втором направлении, которое является противоположным первому направлению по ширине транспортного средства.
| US 6819779 B1, 16.11.2004 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ДОРОГИ, ФОРМЫ И ПОЛОЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ НА ДОРОГЕ, И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2012 |
|
RU2571871C2 |

